z-transform derived from Laplace transform Lecture 15 Discrete-Time System Analysis
advertisement

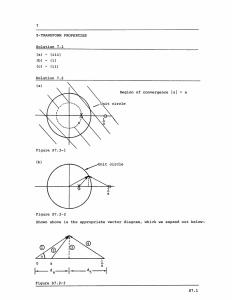
z-transform derived from Laplace transform Lecture 15 Consider a discrete-time signal x(t) below sampled every T sec. x(t ) = x0δ (t ) + x1δ (t − T ) + x2δ (t − 2T ) + x3δ (t − 3T ) + ..... Discrete-Time System Analysis using z-Transform δ (t) ⇔1 The Laplace transform of x(t) is therefore (Time-shift prop. L6S13): X ( s) = x0 + x1e − sT + x2e − s 2T + x3e − s 3T + ..... (Lathi 5.1) z = esT = e(σ + jω )T = eσ T cos ωT + jeσ T sin ωT Now define X [ z ] = x0 + x1 z −1 + x2 z −2 + x3 z −3 + ..... Peter Cheung Department of Electrical & Electronic Engineering Imperial College London URL: www.ee.imperial.ac.uk/pcheung/teaching/ee2_signals E-mail: p.cheung@imperial.ac.uk PYKC 3-Mar-11 E2.5 Signals & Linear Systems L5.8 p560 Lecture 15 Slide 1 PYKC 3-Mar-11 z-1 the sample period delay operator From Laplace time-shift property, we know that z = e sT is time advance by T second (T is the sampling period). −1 − sT Therefore z = e corresponds to UNIT SAMPLE PERIOD DELAY. As a result, all sampled data (and discrete-time system) can be expressed in terms of the variable z. More formally, the unilateral z-transform of a causal sampled sequence: x[n] = x[0] + x[1] + x[2] + x[3] + is given by: X ( s) = ∫ x(t )e − st dt Fourier transform X (ω ) = ∫ x(t )e − jωt dt −∞ ∞ −∞ ω0 = 2π / T −n n =−∞ E2.5 Signals & Linear Systems Continuous-time system Converts integraldifferential equations to & signal analysis; stable or unstable algebraic equations Laplace transform z transform The bilateral z-transform for a general sampled sequence is: PYKC 3-Mar-11 ∞ Suitable for .. Converts finite time signal to frequency domain Continuous-time; stable system, convergent signals only; best for steady-state ∑ n =0 ∑ x[n]z Purpose N0 −1 = ∑ x[n]z − n X [ z] = Definition Discrete X [nω ] = x[n]e jnω0T Converts finite discrete- Discrete time, otherwise 0 time signal to discrete Fourier n =0 same as FT transform N 0 samples,T = sample period frequency domain ∞ ∞ Lecture 15 Slide 2 E2.5 Signals & Linear Systems Laplace, Fourier and z-Tranforms X [ z ] = x0 + x1 z −1 + x2 z −2 + x3 z −3 + ..... (L6S5) δ (t − T) ⇔ e −sT (L6S13) ∞ X [ z] = ∑ x[n]z n =−∞ −n Converts difference equations into algebraic equations Discrete-time system & signal analysis; stable or unstable L5.8 p560 Lecture 15 Slide 3 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 4 Example of z-transform (1) Example of z-transform (2) Find the z-transform for the signal γnu[n], where γ is a constant. By definition Since u[n] = 1 for all n ≥ 0 (step function), Apply the geometric progression formula: Therefore: Observe that a simple equation in z-domain results in an infinite sequence of samples. Observe also that exists only for . For X[z] may go to infinity. We call the region of z-plane where X[z] exists as Region-of-Convergence (ROC), and is shown below. z-plane L5.1 p496 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 5 L5.1 p496 PYKC 3-Mar-11 z-transforms of δ[n] and u[n] Also, for Therefore Since From slide 5, we know Hence Therefore Since L5.1 p499 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 6 z-transforms of cosβn u[n] Remember that by definition: E2.5 Signals & Linear Systems Lecture 15 Slide 7 L5.1 p500 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 8 z-transforms of 5 impulses Find the z-tranform of: By definition, Now remember the equation for sum of a power series: n ∑r k =0 Let k = z-transform Table (1) r n+1 − 1 r −1 −1 r = z and n = 4 z −5 − 1 X [ z ] = −1 z −1 z = (1 − z −5 ) z −1 L5.1 p500 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 9 L5.1 p498 PYKC 3-Mar-11 z-transform Table (2) E2.5 Signals & Linear Systems Inverse z-transform As with other transforms, inverse z-transform is used to derive x[n] from X[z], and is formally defined as: Here the symbol indicates an integration in counterclockwise direction around a closed path in the complex z-plane (known as contour integral). Such contour integral is difficult to evaluate (but could be done using Cauchy’s residue theorem), therefore we often use other techniques to obtain the inverse z-tranform. One such technique is to use the z-transform pair table shown in the last two slides with partial fraction. L5.1 p498 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 10 Lecture 15 Slide 11 L5.1 p494 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 12 Find inverse z-transform – real unique poles Find the inverse z-transform of: Step 1: Divide both sides by z: Step 2: Perform partial fraction: Step 3: Multiply both sides by z: Find inverse z-transform – repeat real poles (1) Find the inverse z-transform of: Divide both sides by z and expand: Use covering method to find k and a0: We get: To find a2, multiply both sides by z and let z→∞: Step 4: Obtain inverse z-transform of each term from table (#1 & #6): L5.1-1 p501 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 13 L5.1-1 p502 PYKC 3-Mar-11 Find inverse z-transform – repeat real poles (2) E2.5 Signals & Linear Systems Find inverse z-transform – complex poles (1) To find a1, let z = 0: Therefore, we find: Use pairs #6 & #10 Find inverse z-tranform of: Whenever we encounter complex pole, we need to use a special partial fraction method (called quadratic factors): Now multiply both sides by z, and let z→∞: We get: L5.1-1 p502 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 15 Lecture 15 Slide 14 L5.1-1 p503 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 16 Find inverse z-transform – complex poles (2) Find inverse z-transform – long division To find B, we let z=0: Consider this example: Now, we have X[z] in a convenient form: Perform long division: Use table pair #12c, we identify A = -2, B = 16, Thus: Therefore and a = -3. Therefore: L5.1-1 p504 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 17 L5.1-1 p505 PYKC 3-Mar-11 E2.5 Signals & Linear Systems Lecture 15 Slide 18