JWRPM_submission_ORE - Open Research Exeter (ORE)
advertisement
")
1
Dealing with Uncertainty in Water Distribution Systems’ Models: a Framework for
2
Real-Time Modeling and Data Assimilation
3
4
Christopher J. Hutton1, Zoran Kapelan2, Lydia Vamvakeridou-Lyroudia3, and Dragan A. Savić2
5
6
Abstract
7
Water Distribution System (WDS) models when applied with real-time data may improve
8
system control, and in doing so, help meet consumer and regulatory demands. Such real-time
9
modelling often overlooks the multiple sources of system uncertainty that cascade into model
10
forecasts, and affect the identification of robust operational solutions. This paper considers key
11
uncertainties in WDS modelling, and reviews promising approaches for uncertainty quantification and
12
reduction in the modelling cascade, from calibration, through data assimilation, to model forecasting.
13
An uncertainty framework exemplifying how such methods may be applied to propagate uncertainty
14
through the real-time control process is outlined. Innovative methods to constrain uncertainty when
15
the time-horizon and data availability limit such thorough analysis are also discussed, alongside
16
challenges that need to be addressed to incorporate uncertain information into the control decision.
17
Further work evaluating the value of these methods in light of computational resources, and the nature
18
of model errors in real WDS is required. Such work is necessary to demonstrate the benefits of
19
considering model and data uncertainty, leading to robust control decisions.
20
Subject Headings: Water Distribution Systems; Uncertainty Principles; Numerical Models; Control
21
22
________________________________________________________________________________________________________________________________
1
Associate Research Fellow, College of Engineering, Mathematics and Physical Sciences, University
of Exeter, Exeter, Harrison Building, North Park Road, Exeter EX4 4QF, U.K. Email:
c.j.hutton@ex.ac.uk
2
Professor, College of Engineering, Mathematics and Physical Sciences, University of Exeter,
Exeter, Harrison Building, North Park Road, Exeter EX4 4QF, U.K.
3
Senior Research Fellow, College of Engineering, Mathematics and Physical Sciences, University of
Exeter, Exeter, Harrison Building, North Park Road, Exeter EX4 4QF, U.K.
23
Introduction
24
Improved operation of Water Distribution Systems (WDS) is required to meet the (potentially)
25
competing objectives of consumer expectation, regulatory requirements and shareholder satisfaction
26
(Bakker 2003; Ofwat 2005; Ogden and Watson 1999). Unnecessary leakage and energy costs occur in
27
many systems as a result of limited system control, which if improved may lead to better operational
28
performance (Jamieson et al. 2007), and mitigate the need for expensive infrastructure investment - a
29
cost ultimately borne by consumers.
30
Sensor development has increased the availability of online monitoring data (Storey et al.
31
2011), which can inform end-users of the states of a WDS. Actuator settings can then be modified in
32
real-time to improve operational performance and deal with system anomalies. Such an approach is
33
heavily reliant on the skills and experience of the system operator to make the most robust
34
intervention, in response to (often) sparse measurements. The potential for improved operational
35
performance when monitoring data is supplemented with on-line system modelling has been
36
demonstrated in a number of studies (Machell et al. 2010; Preis et al. 2010; Rao and Salomons 2007).
37
However, both the data and models used in such Decision Support Systems (DSS) contain
38
considerable uncertainty (Hutton et al. 2011). A key issue not considered fully is the propagation of
39
uncertainty from model calibration, through data-assimilation to real-time model forecasting.
40
This paper presents a framework considering uncertainty in the key stages of WDS model
41
development and application for Real-Time Control (RTC), and provides a critical review of methods
42
applied to quantify and reduce uncertainty at each of these stages. The paper does not intend to
43
provide an exhaustive review but seeks to critically highlight and classify a range of methods applied
44
in the WDS literature. The review also includes promising methods for dealing with model
45
uncertainty applied in related scientific fields, and considers the key issues governing their application
46
in the context of WDS control.
47
This paper is organised as follows. First, a review of uncertainties in WDS modelling is
48
considered, followed by a framework specifying the cascade of uncertainties that exist in producing a
[Type text]
49
model for real-time application. Key methods for dealing with uncertainty in Calibration, and Data
50
Assimilation, are then reviewed. The ideal case of propagating all uncertainties by ensemble
51
representation into model forecasts, and alternative methods given current limitations in data and
52
computational resources is then considered. Finally, conclusions and recommendations for future
53
research are presented.
54
55
Real-time Control Modelling and Uncertainty in WDS
56
Coupling hydraulic system models with on-line system observations – in what is termed a
57
decision support system (DSS) – allows the extrapolation of system measurements both in space, by
58
simulating unmeasured locations, and in time by simulating future system states. Developments in
59
computational power, simulation software (e.g. EPANET2; Rossman 2000), calibration tools (Savic et
60
al. 2009), and sensor development (Storey et al. 2011) have facilitated the application of real-time
61
WDS modelling, typically for two purposes:
62
63
64
Provide warnings of future system states (Pappenberger et al. 2005), such as pipe burst (Bicik
et al. 2011a; Misiunas et al. 2005).
Constrain understanding of operational system states, and explore a range of control strategies
65
for optimal operation (Martinez et al. 2007).
66
This paper focuses on modelling uncertainty during normal operating conditions in WDS,
67
although the methods considered are also relevant for anomalous system conditions (Bicik et al.
68
2011a). Although a number of studies have demonstrated the potential improvements of using on-line
69
models for system control (Machell et al. 2010; Preis et al. 2010; Rao and Salomons 2007), both the
70
data and models used in such DSS contain considerable uncertainty (Bicik et al. 2011b).
71
Uncertainty may be divided into two categories (Hall 2003): (1) Aleatory uncertainty, such as
72
the irreducible spatial and temporal variability in water demand, and (2) Epistemic uncertainty, which
73
results from incomplete system knowledge. Numerical models contain known epistemic uncertainty,
[Type text]
74
which may be reduced, or tolerated (e.g. skeletonisation), but never fully eliminated. An explicit
75
incorporation of either type of uncertainty into WDS models is typically lacking. At best this
76
represents bad practice; at worst, in the context of control decisions and risk management, misplaced
77
confidence in deterministic predictions may lead to undesired consequences.
78
Methods for quantifying and reducing uncertainty in systems models have been developed in
79
hydroinformatics (Hall, 2003) and related scientific fields (Beven 2006; Kavetski et al. 2006a). To
80
apply such methods for real-time WDS control, sources of uncertainty in WDS modelling first need to
81
̂ (e.g. EPANET2 (Rossman 2000)), containing equations that
be considered. A general model, 𝐌
82
̂ = {x̂1 , … , x̂𝑝 } with length p
represent the functional relationship between a vector of system states, 𝐗
83
̂ 𝐨 = {x̂1 , … , x̂𝑝 }, also with length p (e.g.
(e.g. Nodal Pressure), given a set of initial system states 𝐗
84
̂ = {θ̂1,..., θ̂d}, with length d
Tank Levels, Pump and Valve Settings), a vector of model parameters 𝛉
85
̂ = {d̂1 , … , d̂𝑛 } with
(e.g. Pipe roughness and pump curves), and a time-series of driving conditions, 𝐃
86
length n (e.g. water demand):
̂, 𝐗
̂=𝐌
̂ (𝛉
̂𝐨, 𝐃
̂)
𝐗
87
(1)
88
The circumflex (hat) indicates the uncertain nature of the model variables. Three types of model
89
uncertainty need to be dealt with in WDS models (Hutton et al. 2011), as discussed below.
90
Model Structural Uncertainty refers to errors in the mathematical representation of reality, and is a
91
̂ ≠ 𝐌). Examples include:
form of epistemic uncertainty, where the model will never equal reality (𝐌
92
Skeletonisation - the removal of pipes not considered essential for system analysis –
93
represents one of the key WDS model structural uncertainties. Skeletonised models may
94
neglect dead ends and high elevation nodes in the network, and adversely affect pressure
95
surges (Boulos et al. 2004), demand satisfaction predictions (Walski et al. 2003), contaminant
96
consequence assessment (Bahadur et al. 2006) and chlorine decay simulation (Menaia et al.
97
2003). Whilst skeletonised models may be hydraulically equivalent to all pipes models for
98
steady state conditions (Jung et al. 2007; Preis et al. 2011), they can perform poorly in
[Type text]
99
transient conditions (Jung et al. 2007). Models that include all pipes (e.g. Jacobsen and
100
Kamojjala 2009) may be computationally unfeasible in real-time, while increased data
101
requirements for calibration may outweigh structural uncertainty.
102
Water demand is typically aggregated at junction nodes in WDS models, yet consumers
103
extract water from along pipes within the network. Although head loss corrections to
104
overcome this simplification have been developed (Giustolisi 2010), accurate specification of
105
distributed demand is difficult.
106
Demand driven models may be considered valid for normal operating conditions in well
107
designed and maintained WDS, whereas pressure driven solutions are more appropriate in
108
cases of fire flow, pipe leakage and valve closure (Giustolisi et al. 2008a; Giustolisi et al.
109
2008b). The latter approach requires additional data to determine the relationship between
110
pressure head and flow (Ozger and Mays 2004), which are not usually accurate, and increased
111
computational time, which is not always available for real time computations.
112
113
Parameter Uncertainty reflects uncertainty in equation variables used to represent system
114
components (e.g. pipe roughness). Such uncertainty is aleatory, as parameters can vary over space and
115
time, and epistemic as system discretisation in space and time can result in a failure to reconcile the
116
scale observations with model parameters. Parameter values are often therefore ‘effective’ (Lane
117
̂ ≠ 𝛉).
2005) in that they produce the correct prediction, but often have little physical meaning (𝛉
118
Pipe roughness is problematic to identify accurately in WDS models as it cannot be directly
119
measured, and because of pipe deterioration (Boulos et al. 2004; Kleiner and Rajani 2001),
120
roughness changes with pipe age. Roughness values calibrated using junction pressure
121
measurements (Kapelan et al. 2007; Savic et al. 2009) will reflect uncertainties in system
122
specification, roughness pipe grouping, and data uncertainty.
123
Due to wear (Hirschi et al. 1998) pumps typically do not operate at the efficient point supplied
124
by the manufacturer (Walski et al. 2003), and alongside valve settings, may need to be
125
considered in the calibration problem.
[Type text]
126
Measurement/Data Uncertainty refers to uncertainty in quantities used to define initial conditions
127
̂ 𝐨 ≠ 𝐗 𝐨 ), model inputs (𝐃
̂ ≠ 𝐃), and model state observations (𝐗̈) utilised in evaluation of model
(𝐗
128
predictions (𝐗̈ ≠ 𝐗). Such uncertainties result from instrumentation errors, and mismatches between
129
the scale of observations and predictions (e.g., demand lumping and disaggregation).
130
Measurement errors affect the accuracy with which system states may be quantified, both
131
through direct measurement, and indirectly when such measurements are employed to
132
calibrate and evaluate WDS model performance (Bargiela and Hainsworth 1989).
133
Independent quantification of these uncertainties is ideally required such that they may be
134
propagated into calibrated states and parameters, and ultimately model forecasts (see Muste et
135
al. (2012) for a review of methods for instrument error quantification).
136
Aleatory demand uncertainty is large in WDS models, as demand fluctuates over a variety of
137
temporal and spacial scales depending on consumer type (Davidson and Bouchart 2006;
138
Herrera et al. 2010).
139
Epistemic demand uncertainty results from a low density of metered houses, and the difficulty
140
of obtaining such information in real-time. Demand is more readily inferred by calibration to
141
measured pipe flow, water quality and DMA measurements (Branisavljevic et al. 2009;
142
Jonkergouw et al. 2008; Kang and Lansey 2009). However, such approaches may require
143
downscaling to individual network nodes (Kang and Lansey 2009).
144
145
A framework for dealing with uncertainty in real-time control of WDS
146
̂ to make real-time predictions requires that all of the terms on the
Employing the model, 𝐌
147
right hand side of Equation 1 are reasonably constrained. A general procedure for achieving this is
148
̂), such as roughness are calibrated off-line,
presented in Figure 1. First, model parameters (𝛉
149
̂ 𝐨 ), such as demand and nodal pressure (Preis et al. 2010), are
following which, model states (𝐗
150
estimated by assimilating real-time measurements into the model. Finally, when coupled to a system
151
demand forecast (e.g. Herrera et al. 2010), the model can simulate future system states in response to
[Type text]
152
control options/objectives (Rao and Salomons 2007). The flow of data through such model
153
development is typically deterministic. However, to make robust control decisions, model predictions
154
should be made conditional on WDS model and data uncertainty..
155
Uncertainties present in WDS
have been considered extensively in the WDS literature.
156
However, assessing uncertainty in component parts of model development independently can lead to
157
an under-estimation of total uncertainty (Zappa et al. 2011), and miss-placed confidence in model
158
predictions. A number of frameworks for dealing with total model uncertainty have been presented in
159
the research literature, including the BAyesian Total Error Analysis framework (BATEA; Kavetski et
160
al. 2006a; Thyer et al. 2009), Global Assessment of Model Uncertainties (GAMU; Deletic et al.
161
2011), and the Generalized Likelihood Uncertainty Estimation procedure (GLUE; Beven and Binley
162
1992) amongst others (Liu and Gupta 2007; Schoups and Vrugt 2010). Such frameworks have mainly
163
focussed on the key issue of model calibration. However, the full propagation of uncertainty from
164
calibration (Section 4) through data assimilation (Section 5) to model forecasting (Section 6), and the
165
challenges in using such information to inform real-time control (Section 6.6) need to be considered
166
in the specific context of WDS (Figure 1).
167
168
Calibration and Parameter Uncertainty
169
Introduction
170
WDS model parameter calibration, which is reviewed by Savić et al. (2009), is a necessary
171
step prior to applying a model to understand system operation. Model performance is evaluated by
172
̂ = {ŷ1 , … , ŷ𝑛 } with length n, to a
comparing a time-series of the selected model response variable, 𝐘
173
vector of system observations, 𝐘̈ = {𝑦̈1 , … , 𝑦̈𝑛 } to obtain a vector of model residuals:
174
̂, 𝐗
̂𝐨, 𝐃
̂ ) = ŷ𝑖 (θ|𝐗
̂𝐨, 𝐃
̂ ) − ÿ 𝑖
𝜀𝑖 (θ|𝐘
𝑖 = 1, … , 𝑛
(2)
175
The typical calibration approach applied to WDS models forces the residual errors as close to
176
zero as possible by adjusting the value of model parameters, either by a non-evolutionary optimisation
[Type text]
177
method (e.g. Gradient Descent) or an evolutionary algorithm, (e.g. Genetic Algorithm; Savic et al.,
178
2009; Table 1). Implicit in such an approach is the assumption that there are no other forms of
179
̂ = 𝐌), the initial states represent the true system
uncertainty; that the model equates to reality (𝐌
180
̂ 𝐨 = 𝐗 𝟎), the input drivers represent the true drivers of the system (𝐃
̂ = 𝐃), and that the
states (𝐗
181
observations are error free (𝐘̈ = 𝐘). As reviewed above, this is not the case ; multiple parameter sets
182
may be found that produce equally likely (or behavioural) model predictions, a form of model
183
parameter equifinality (Beven 2006).
184
In light of parameter equifinality it is more useful and interesting to obtain information on
185
parameter and predictive uncertainty, which for each variable can be expressed in the form of a
186
posterior Probability Density Function (PDF). In WDS models this has typically been achieved post
187
calibration with the First Order Second Moment (FOSM) method (Bush and Uber 1998; Lansey et al.
188
2001). FOSM assumes model linearity, independence and normality of measurement errors and
189
parameter values (Kapelan et al. 2007). Further, it may not be applicable if the posterior parameter
190
distribution deviates from the multi-normal distribution (Vrugt et al. 2003).
191
In a range of modelling disciplines the preferred method to obtaining the posterior PDF is via
192
Bayes’ equation, which can be specified considering the joint inference of both model structure and
193
parameters (Draper 1995):
194
̂|𝐘̈, 𝐗
̂, 𝐌
̂|𝐌
̂,𝛉
̂𝐨, 𝐃
̂ ) ∝ 𝑃(𝐘̈|𝛉
̂,𝐗
̂𝐨, 𝐃
̂ )𝑃(𝛉
̂ )𝑝(𝐌
̂)
(𝐌
195
The first right hand term represents the likelihood function, the second term the prior parameter
196
distribution, and the third term the prior distribution of possible model structures. In most applications
197
a single model is applied, which collapses this final term to a single set of structural assumptions.
198
Solving Bayes’ equation analytically is typically intractable, and therefore some form of posterior
199
sampling is conducted; methods include random Monte Carlo sampling and Latin hypercube sampling
200
(Kang et al. 2009), and a more advanced family of Markov Chain Monte Carlo (MCMC) methods,
201
which use past information derived from the posterior distribution to inform the nature of further
202
sampling (see Vrugt et al. (2009a) for recent developments and methodological issues). Specification
[Type text]
(3)
203
of the likelihood function represents the key difference between formal and informal Bayesian
204
approaches (Table 1).
205
206
Formal Bayesian Calibration Approaches
207
The classical formal approach requires specification of a likelihood function which
208
necessarily makes strong assumptions regarding the nature of model (and measurement) errors. The
209
standard approach assumes that residual errors are mutually independent, Gaussian-distributed and
210
homoscedastic, leading to a Gaussian error model (or log likelihood for convenience; Vrugt et al.
211
2009b). Unfortunately residual errors often do not conform to such a simple distribution (Thyer et al.
212
2009), which can lead to bias in the posterior parameter PDF, and predictive distribution (Beven et al.
213
2008).
214
In the implicit formal approach, modifications to the likelihood function are made to account
215
for the different types of error, including adding autoregressive terms to account for correlated errors
216
(Bates and Campbell 2001; Sorooshian and Dracup 1980), Box-Cox transformations to
217
reduce/remove Heteroscedasticity and non-Gaussianity (Box and Cox 1982; Freni and Mannina
218
2010), and methods that apply a mixture of distributions in the error model (Schaefli et al. 2007).
219
More recently heteroscedastic, skew, kurtosis and bias parameters have been included in applied
220
likelihood functions that, alongside model parameters, have to be jointly inferred from the sampling
221
procedure (Schoups and Vrugt 2010).
222
Explicit approaches have also been developed, most notably through the BATEA framework,
223
that seek to represent explicitly different forms of error (Kavetski et al. 2006a). For example, in
224
hydrological application multipliers have been applied to account for measurement uncertainties in
225
input rainfall (Kavetski et al. 2006b). Such representation is via additional “latent parameters” (Thyer
226
et al. 2009; Vrugt et al. 2009b), that have to be inferred jointly with model parameters during the
227
calibration procedure. Such an approach is vulnerable to “ill-posedness” that results from the
228
difficulty of specifying a priori that nature of input and structural errors (Renard et al. 2010) – i.e.
[Type text]
229
separation of errors in system skeletonisation and demand estimates. Whilst the implicit approach
230
does not attempt to separate out these sources of uncertainty, practical estimates of parameter and
231
total predictive uncertainty may be more readily derived (Schoups and Vrugt 2010).
232
An integral yet frequently ignored aspect of the formal inference procedure is the application
233
of posterior diagnostic checks to evaluate the error model hypothesises encapsulated in the likelihood
234
function (Thyer et al. 2009). Such checks include Quantile-Quantile (Q-Q) plots, autocorrelation
235
plots, and plots of residual error against output magnitude (Schoups and Vrugt 2010; Thyer et al.
236
2009; Yang et al. 2007).
237
238
Informal Bayesian Calibration Approaches
239
The GLUE procedure (Beven and Binley 1992; Beven and Freer 2001), more recently
240
referred to as an informal Bayesian approach (Smith et al. 2008a), seeks to find “behavioural”
241
parameter sets; that is, parameter sets consistent with the observations according to an informal
242
likelihood function (see Smith et al. (2008a) for a review). Following some posterior sampling,
243
parameter sets whose likelihood is greater than a user defined threshold are normalised to unity to
244
derive probabilistic information. Such an approach does not make assumptions about the nature of
245
residual errors in the likelihood function, and in doing so avoids potential over-conditioning of the
246
posterior parameter distribution (Beven et al. 2008). However, in doing so GLUE does not explicitly
247
consider other forms of uncertainty, which may lead to poorly constrained parameters (Stedinger et al.
248
2008).
249
Recent GLUE developments include the limits of acceptability approach (Beven 2006), which
250
like some formal Bayesian approaches, attempts to incorporate the effects of observation error in
251
model evaluation. The approach calculates a normalised evaluation score at each time-step to evaluate
252
where during a simulation a model is behavioural (Liu et al. 2009). The approach has also been
253
extended within the GLUE framework to consider model structural uncertainties (Krueger et al.
[Type text]
254
2010). The MCMC SCEM-UA algorithm has also been adapted to adequately explore posterior
255
parameter space within GLUE (McMillan and Clark 2009).
256
Much debate exists in the modelling literature regarding the most appropriate application of formal
257
and informal Bayesian approaches (Beven et al. 2008; Mantovan and Todini 2006; Stedinger et al.
258
2008; Vrugt et al. 2009b), the suitability of simpler approximations for quantifying parameter
259
uncertainty (Gallagher and Doherty 2007; Kang et al. 2009), and the application of the probabilistic
260
approach more generally (Hall 2003) Probabilistic methods are potentially limited by the requirement
261
to select a uniform distribution in the face of ignorance about the probability of an event; however,
262
during such initial assumptions should no longer be influential, provided the model has been
263
confronted with sufficient data (Freni and Mannina 2010). The problem with such an approach is that
264
it conflates indeterminanacy with equiprobability (Dubois 2010; Hall 2003); natural variability and a
265
lack of system knowledge are merged and represented probabilistically. There is no theory to manage
266
epistemic model uncertainty, as by definition, it is poorly known (Beven and Alcock 2012). Unless
267
these sources of uncertainty (e.g. input measurement data and model structural error) have been well
268
defined a priori, posterior separation may be difficult (Renard et al. 2010; Willems 2008). When
269
aleatory and epistemic uncertainties are both present, imprecise probabilities have been employed,
270
where a family or interval of probability distributions is used to represent imprecision (Merz and
271
Thieken 2005).
272
273
Possibility Theory and Evidence Theory based Calibration
274
In possibility theory, available (typically linguistic) knowledge about a quantity may be expressed as
275
an interval, or a fuzzy number – which defines the imprecise degree of membership of an element
276
(such as a parameter) to belong to a specific value (Revelli and Ridolfi 2002). To propagate such
277
uncertainty through system models, a sampling procedure is required to reconstruct the posterior
278
possibility distributions of different system states. Such methods have been applied in WDS to
279
propagate uncertainties in pipe roughness (Revelli and Ridolfi 2002) and demand (Branisavljevic et
280
al. 2009). Fu and Kapelan (2011) quantified epistemic uncertainty in the probability distribution
[Type text]
281
parameters of future water demand using a fuzzy procedure. Such an approach may be applied to
282
account for uncertainty in the parameters of a probabilistic error model; however, sampling may come
283
at significant computational cost when the inner (aleatory) and outer (epistemic) distributions need to
284
be sampled (Sun 2010).
285
286
Evidence theory is the simplest method of combining probability and possibility theory into the same
287
theoretical framework (Hall et al. 2007; Hall 2003). The basic probability assignment (BPA), m() (as
288
opposed to p() in probability theory) is assigned to sets as opposed to mutually exclusive singletons.
289
As a result, two measures of likelihood for a subset, belief Bel(A) and plausibility Pl(A) are obtained
290
from m(A) (Helton et al. 2004). The interval between belief and plausibility represents the range in
291
which the true probability may lie. Fu and Kapelan (Fu and Kapelan in press) combined probabilistic
292
information on rainfall uncertainty, with fuzzy model parameters using evidence theory. The ability of
293
evidence theory to better handle incomplete or imprecise information has resulted in greater
294
application in WDS to deal with anomalous real-time conditions (Bicik et al. 2011a; Sadiq et al.
295
2006).
296
Data Assimilation
297
298
Concept
299
To derive a real-time forecast the calibrated model requires an estimate of the initial model
300
̂ 𝐨 ). Data Assimilation (DA) is a name provided to a class of methods that combines the
states (𝐗
301
uncertain model with new (and uncertain) data to derive an estimate of the system state (Table 2). The
302
̂ 𝑡−1 ) to t in response to the
model propagates forwards from a set of initial conditions at time t-1 (𝐗
303
driving forces and a set of time invariant model parameters:
304
305
̂𝑡 = 𝐌
̂ (θ̂, 𝐗
̂ 𝑡−1 , 𝐃
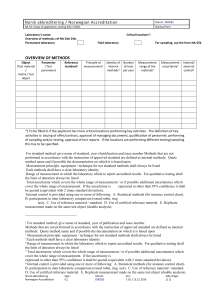
̂ ) + ω𝑡
𝐗
306
[Type text]
(4)
307
where ω𝑡 represents the model error term, with zero mean and covariance V𝑡 . To assimilate
308
observations, model outputs need to be related to the model states, using an observation operator, Ht:
309
310
̂ 𝑡 ) + ε𝑡
𝐘̈𝑡 = 𝐻𝑡 (θ̂, 𝐗
(5)
311
312
where ε𝑡 denotes the observation error with zero mean and covariance R 𝑡 . Model states are updated
313
considering the relative difference between model and observation errors.
314
Advances in monitoring data, sensor placement and telemetric methods have facilitated the
315
collection of data in real-time for DA (see: Hart and Murray 2010; Ruggaber et al. 2007; Storey et al.
316
2011). Automated methods have also been developed to process these data (Branisavljevic et al. 2010;
317
Schilperoort et al. 2008), which should consider measurement uncertainty when determining between
318
good and bad data (Bertrand-Krajewski et al. 2003; Winkler et al. 2008).
319
A number of DA methods have been developed and applied to reduce uncertainty in real-time
320
model application (see Table 2), particularly in related scientific disciplines, including meteorology,
321
hydrology and climatology (Evensen 2003; Matgen et al. 2010; van Leeuwen 2009).
322
323
Predictor-Corrector Schemes
324
The basic Kalman Filter (KF) is a sequential filter method that provides a solution to
325
equations (4) and (5), provided that they represent a Gaussian Linear System (Burgers et al. 1998).
326
The state forecast (superscript f) is updated (superscript a) using system observations and the Kalman
327
gain, 𝐾𝑡 whose value depends on the relative magnitudes of observation and model error:
328
329
̂ 𝑎𝑡 = 𝐗
̂ 𝑡𝑓 + 𝐾𝑡 (𝐘̈𝑡 − 𝐻𝑡 𝐗
̂ 𝑡𝑓 )
𝐗
(6)
330
331
The KF algorithm has been applied to a WDS to estimate unknown roughness in a linear estimation
332
problem (Todini 1999). The KF has worked well for demand estimation in branched networks,
333
however, has performed poorly in nonlinear looped WDS (Kang and Lansey 2009). The KF update is
[Type text]
334
sensitive to the (often limited) information available to constrain model and observations errors.
335
Furthermore, state update means the KF no longer conserves mass and momentum of the physical
336
system being simulated. Further research is recommended to understand general applicability of the
337
KF to WDS.
338
The Extended Kalman Filter (EKF) was developed to work better than the KF in cases of
339
strong system non-linearity, where the model is approximated with a tangent linear operator
340
(Jacobian; Evensen 2003). The EKF has been applied for water demand estimation (Nasseri et al.
341
2010) and also by Shang et al. (2006) for real-time update of demand estimates. In other scientific
342
fields EKF can provide comparable performance with ensemble methods (see Section 5.3; Reichle et
343
al. 2002), however is unsuitable in the case of large system non-linearities (Hoteit et al. 2005). EKF is
344
limited by the computational expense of integrating the tangent linear model forwards to derive the
345
error covariance matrix, and by the potential for unbounded error growth resulting from neglecting
346
higher order terms in the closure scheme (Zhang and Pu 2010).
347
Other Predictor-Corrector schemes include that developed by Preis et al (2011) who applied a
348
GA to update Demand Multiplication Factors for a skeletonised network in real-time, with an
349
objective function that accounted for measurement noise. Davidson and Bouchart (2006) developed a
350
weighted least squares method to adjust nodal demand whilst satisfying SCADA constraints.
351
However, in the under-determined problem considered, a range of solutions would be feasible. Kang
352
and Lansey (2009) applied a Tracking State Estimator (TSE) iteratively to obtain demand estimates in
353
real-time for a WDS. The TSE approach was better suited to looped WDS areas than the KF.
354
355
Ensemble Based Approaches
356
Ensemble assimilation procedures have been developed to overcome some of the problems
357
involved in providing a correction to a deterministic forecast. In a generic ensemble approach the
358
̂ 𝑡−1 |𝐘̈𝑡−1 ), becomes the prior (or forecast density):
posterior density of model states at time t-1, 𝑝(𝐗
359
̂ 𝑡 |𝐗
̂ 𝑡−1 , 𝐘̈𝑡−1 ). The density is then combined with a likelihood function of the newly available
𝑝(𝐗
360
observations to derive the posterior density of model states represented by Bayes’ equation:
[Type text]
361
362
̂ 𝑡 |𝐘̈𝑡 ) ∝ 𝑝(𝐘̈𝑡 |𝐗
̂ 𝑡 )𝑝(𝐗
̂ 𝑡 |𝐗
̂ 𝑡−1 , 𝐘̈𝑡−1 )
𝑝(𝐗
(7)
363
364
The Ensemble Kalman Filter (EnKF) was developed to overcome some of the problems
365
with EKF by propagating an ensemble (n) of model states derived from Monte Carlo perturbations of
366
the input states. Equations (4) and (6) are applied to propagate each ensemble member forwards in
367
time, and the model error covariance calculated using the ensemble mean, which avoids the
368
computational costs associated with propagating the error covariance matrix (Burgers et al. 1998). To
369
maintain ensemble variance noise is added to the observations during state update (Burgers et al.
370
1998; Evensen 2003). The EnKF has been applied most widely in the disciplines of climatology,
371
meteorology (Hargreaves et al. 2004), and more recently to hydrological systems (Xie and Zhang
372
2010), and has been shown to work well for nonlinear problems (Evensen 2003; Pu and Hacker
373
2009).
374
To avoid perturbing initial system states, which may increase sampling error, an alternative
375
set of schemes apply square root filter methods (Tippett et al. 2003), which have been shown to
376
outperform the EnKF when applied to a rainfall-runoff model (Clark et al. 2008). Further
377
methodological advances to the EnKF (see Evensen (2003) and Zhang and Pu (2010) for reviews)
378
include the Retrospective EnKF where updates are applied to t-n time steps using the current
379
observation (Pauwels and De Lannoy 2006). Komma et al. (2008) avoided calculating the Jacobian
380
between states and observations by propagating multiple realisations of each ensemble member, and
381
retaining the ensemble member closest to the observations.
382
Sequential Monte Carlo Sampling, also known as the Particle Filter (PF) applied a recursive
383
Bayesian Filter for state update (Arulampalam et al. 2002). The posterior density in Equation 7 is
384
represented by a number (np) of particles (e.g. independent models) each with an associated
385
weight (𝑤𝑡𝑖 ). In the sequential case as described in Equation 7, the prior PDF can be set
386
̂ 𝑡 |𝐗
̂ 𝑡−1 ), and is obtained using the system model. As sampling from the posterior density is
as 𝑝(𝐗
[Type text]
387
generally impossible, the transition prior is typically used as the proposal density. Models are
388
propagated forwards, and each reweighted as a function of the likelihood:
389
390
𝑤𝑡𝑖 =
̂ 𝑖𝑡 )
𝑝(𝐘̈𝑡−1 |𝐗
𝑛
̂ 𝑖𝑡 )
∑ 𝑝 𝑝(𝐘̈𝑡−1 |𝐗
(8)
𝑖=1
391
392
The chosen likelihood function, which accounts for measurement error, is often assumed Gaussian
393
due to a lack of information about errors in the observations (Moradkhani et al. 2005a), but
394
heteroscedastic likelihoods have also been used (Salamon and Feyen 2010). Work is required to
395
evaluate whether other approaches might be applicable to determine model weights, including
396
informal likelihood functions, and methods employing possibility theory and/or evidence theory. The
397
more particles are included the closer the PF approximates the true posterior. The PF has been applied
398
in climatology, meteorology and hydrological modelling (Pham 2001; Salamon and Feyen 2009; van
399
Leeuwen 2009; Vossepoel and van Leeuwen 2007; Weerts and El Serafy 2006) and can outperform
400
EnKF, but at increased computational cost (Pham 2001). Unlike EnKF the state-space model need not
401
be linear or Gaussian and no modifications to system states are made, preserving mass and
402
momentum in the model equations. However, not updating model states can lead to filter degeneracy,
403
where particles (models) evolve away from the observations over time, leading to poor posterior
404
representation (van Leeuwen 2009).
405
Methods for dealing with filter degeneracy include: re-sampling particles with higher weights
406
at the expense of poorer performing particles; the guided particle filter, which confronts particles with
407
observations prior to the measurement time; and the backtracking filter, which re-samples back in
408
time with a larger ensemble (see review by van Leeuwen (2009)). An alternative to resampling is to
409
modify the proposal density by using an EnKF to bring the particles closer to future observations (van
410
Leeuwen 2010).
411
412
Joint State and Parameter Estimation
[Type text]
413
Data assimilation generally assumes an optimal parameter set is known prior to model
414
simulation (e.g. Shang et al. 2006). However, prior off-line calibration may not be representative of
415
real-time conditions (Preis et al. 2011), and not consider prior parameter uncertainty. Ensemble based
416
approaches for joint state and parameter estimation have been developed implementing both the EnKF
417
and PF (Moradkhani et al. 2005a; Moradkhani et al. 2005b; Salamon and Feyen 2010; Smith et al.
418
̂ 𝑡 is expanded to also represent the model parameters, which are
2008b). The vector of model states 𝐗
419
therefore considered time-varying. As changes to a parameter may not be observed until a number of
420
time-steps ahead, observations may be assimilated after t+n observations (Salamon and Feyen 2009),
421
and then the model re-propagated forwards again from t+1 to t+n+1 (Noh et al. 2011). Model states
422
and parameters may also be updated at different intervals.
423
In WDS, state (demand) and parameter (roughness) estimation is typically separate, however,
424
the availability of data means estimates of either are undermined by the uncertainty in the other. Brdys
425
and Chen (1994) applied a recursive branch and bound method to jointly infer demand and roughness,
426
accounting for measurement uncertainty. Kang and Lansey (2011) showed improved performance
427
over joint inference of demand and roughness by updating them separately using different observation
428
weights for each in a two-stage Weighted Least Squares (WLS) approach.
429
An issue for all real-time DA methods is the computational time required to propagate an
430
ensemble of models, or run an optimisation of model states in real-time. Ensemble sizes reported in
431
the literature vary depending on the specific application (Madsen and Skotner 2005; Weerts and el
432
Serafy 2005), and scale exponentially with problem size (Snyder et al. 2008; van Leeuwen 2009).
433
Thus Joint State and Parameter estimation will be more expensive computationally, but may be
434
necessary to correct the parameter estimates to the latest conditions.
435
436
Model Forecasting and Decision-Support
437
438
General
[Type text]
439
Calibration and Data Assimilation should quantify and reduce uncertainties in the vector of
440
̂) and initial system states (𝐗
̂ 𝐨 ) in the chosen (or optimised) model structure (𝐌
̂ ).
model parameters (𝛉
441
The forecasting time horizon in a specific WDS is determined by the time required to initiate control
442
actions to mitigate the impacts of a forecasted event. Unlike rainfall-runoff systems, the lag time
443
̂ and changes in system state is short, and therefore a demand forecast is required
between demand (𝐃)
444
to drive a real-time control model (Rao and Salomons 2007).
445
Short-term water demand fluctuations (e.g. hourly and daily timescales) are a complex
446
function of climatic, social, economic and cultural drivers (Arbues et al. 2003). To overcome the
447
difficulty (if not impossibility) of explicitly modelling human water demand, a range of data-driven
448
models have been applied (see Herrera et al. (2010) for a comparison of methods). The relative
449
performance of different models will depend on the specific WDS, however, regular model updating
450
(calibration) as new information becomes available is likely to improve the performance of all models
451
(Herrera et al. 2010). Quantifying uncertainty in demand forecasting has received relatively little
452
attention (Cutore et al. 2008; Zhang et al. 2007), in particular uncertainty in downscaling demand
453
predictions to individual nodes (Kang and Lansey 2009). The techniques considered in section 2 and 3
454
for calibration and data assimilation are also applicable for dealing with demand model uncertainty
455
(e.g. Cutore et al. 2008).
456
457
Combining sources of uncertainty in model forecasting
458
Applying a model in real-time requires estimates of both the values and uncertainties in all of
459
the terms present in the right hand side of the equation (1). A thorough method for combining and
460
propagating these terms into a system forecast has only been considered in different modelling
461
contexts (e.g. flood prediction), and is here introduced specifically for WDS:
462
1. Calibrate the WDS model(s) (e.g. different levels of skeletonisation) on a vector of past
463
̂|𝐘
̂,𝛉
̂, 𝐗
̂𝐨, 𝐃
̂ ), considering the
observations to derive the posterior parameter distribution, 𝑃(𝐌
464
key assumptions in the chosen statistical method for quantifying uncertainty.
[Type text]
465
466
2. Sample the posterior 𝑛𝑝 times to derive an ensemble of models, each with a state vector that
can include: tank levels, pump settings, nodal demands and parameters derived from stage 1.
467
3. Propagate each model forwards in time using a perturbed demand distribution for each
468
ensemble member, based on measured demand (e.g. at the DMA level), and a suitable down
469
scaling technique.
470
471
4. Assimilate system observations (e.g. nodal head or pipe flow) once available, to derive an
̂ 𝑡 |𝐘̈𝑡 ) using an ensemble assimilation approach.
updated posterior of model states, 𝑝(𝐗
472
5. Use updated demand alongside ancillary data to derive a demand forecast model and forecast
473
̂ ) for the time horizon/control horizon for
an ensemble of size 𝑛𝑑 of future water demands (𝐃
474
the specific WDS.
475
̂ 𝑡 |𝐘̈𝑡 ), (𝑛𝑝 ) becomes the prior, 𝑝(𝐗
̂ 𝑡 |𝐗
̂ 𝑡−1 , 𝐘̈𝑡−1 ), which is
6. The ensemble representation of 𝑝(𝐗
476
propagated forward for each member of the demand forecast ensemble (𝑛𝑑 ) over the time
477
horizon, to give a forecasting ensemble of 𝑛𝑝 ∙ 𝑛𝑑 .
478
479
7. Use the posterior spread to infer the statistical likelihood of the future event to inform a rulesbased decision, or repeat stage 6 for different potential control options.
480
8. Update system actuator settings based on the simulations conducted in Step 7.
481
9. At the next time-step for which observations are available repeat steps 2 through 6.
482
483
The stages represented above, whereby and ensemble is used to sample the specified (typically
484
probabilistic) uncertainty distributions to cascade different forms of uncertainty through to a model
485
forecast, represents a full, robust and desirable treatment of model uncertainty, provided adequate
486
methods have been applied to derive the necessary information on uncertainty.
487
The ensemble approach is however, currently impractical in many, if not all model
488
forecasting situations. The impracticality is primarily a result of computational limitations, however
489
advances in the application of multi-core CPU (Lopez-Ibanez et al. 2008) and in particular GPU
490
processing for hydraulic solvers and optimisation problems (Guidolin et al. 2011; Harding and
491
Banzhaf 2007) look to improve the potential for representing the full ensemble in real-time. The
[Type text]
492
approach may also be limited in some cases by the inability to constrain and quantify all sources of
493
uncertainty, particularly within the probabilistic framework, within which most reviewed (and
494
applied) methods have been developed
495
forecasting to make robust control decisions for WDS still remains. In light of the above limitations,
496
the remainder of section 6 will consider alternative methods to quantify and reduce model uncertainty
497
in model forecasting (see Table 3).
However, the need to consider uncertainty in model
498
499
Reduced and Data-driven models
500
Reduced (skeletonised) models are widely applied in WDS to overcome the
501
computational impracticality of running an all pipes model, and should be compared to full models to
502
evaluate the validity of the simulation during calibration (Preis et al. 2011). However, such validation
503
may not hold for future system conditions. Another approach to reduce computational burden is to
504
derive a linearisation of the hydraulic solver (Xu 2003).An alternative approach to model reduction is
505
to abandon a physical basis for the model, and apply data-driven models (also termed meta-models) to
506
the control process (Broad et al. 2010). The computational burden is moved off-line when such
507
models are calibrated to the physical model. Rao and Salomons (2007) and Broad et al. (2010) both
508
trained ANNs to offline EPANET simulations. GAs were used with ANN simulations to optimise
509
system performance and reduce operational cost (Martinez et al. 2007; Salomons et al. 2007).
510
Calibration methods presented in Section 4 should be used to account for uncertainty in the initial
511
system model and the meta-model approximation, which if done so correctly, may conversely
512
increase computational time.
513
514
Approximate Forecasting
515
A smaller ensemble forecast may be applied to provide an approximate representation of the
516
key uncertainties affecting model predictions (Zappa et al. 2011). Pappenberger et al (2005) applied a
517
clustering method to the posterior parameter distribution to derive a set of 6 representative parameter
518
sets in a rainfall runoff model, one for each cluster, which was then applied with 52 rainfall forecasts
[Type text]
519
and used to drive 10 flood inundations models. Sensitivity analysis, such as Sobol’s method (Saltelli
520
et al. (2006)), may be applied to identify representative parameter sets for further propagation.
521
An alternative approach is to approximate the posterior distribution with uncertainty bounds
522
obtained off-line prior to model forecasting. Shrestha et al. (2009) trained an ANN to reproduce the
523
upper and lower prediction intervals (90%) derived from GLUE calibration, which was then ran
524
alongside the deterministic model to produce upper and lower forecast prediction bounds. Hostache et
525
al. (2011) applied a similar approach to a flood forecasting model, whereby a forecast was made over
526
a calibration period and used to develop a bivariate meta-gaussian model, which was used as an
527
integrated measure of all errors. Such methods can only be as good as the original specification of
528
uncertainty bounds. The conditions under which the original uncertainty/predictive bounds were
529
derived needs to be representative of the forecasting conditions, which includes the effect of
530
uncertainties in forecasted input drivers on model uncertainty. Approximate forecasting methods
531
require further evaluation in the context of WDS model forecasting.
532
533
Error correction
534
The accuracy of a system forecast – or forecast skill - is determined by the initial conditions
535
provided when the last observations were assimilated, which will eventually become ”washed out”
536
(Madsen and Skotner 2005). Data-driven models, such as ANN models (Shamseldin and O'Connor
537
2001), have been calibrated to residual error time-series (from calibration of a process-based model)
538
and used to calculate innovations, which are then added to the deterministic model forecast. Abebe
539
and Price (2003) improved 1-6 hour rainfall-runoff model forecasts by adding an ANN model
540
prediction, which was calibrated to past model residuals. Other error correction methods include
541
autoregressive time series models (Hostache et al. 2011; Lekkas et al. 2001) and genetic programming
542
(Khu et al. 2001). Though comparative studies have been conducted between different methods (e.g.
543
Goswami et al. 2005), such methods remain to be compared in the WDS context, and must be
544
compared using a forecasted as opposed to “measured” demand.
545
Madsen and Skotner (2005) extended error correction procedures to also update model states;
546
pre-determined gain functions were used to update state variables using the innovation determined
[Type text]
547
off-line at measurement locations. Cañizares et al. (2001) applied a constant KF gain matrix for on-
548
line DA, derived from off-line EnKF simulations. Mancarella et al. (2008) employed a local model to
549
estimate forecast error at measured locations in the computational domain, and correlations between
550
model states to distribute these error corrections over the model domain. State error-correction
551
represents a computationally efficient method for state updating as innovations and the state
552
covariance matrix may be calculated off-line. However, the methods need to be evaluated in the
553
context of WDS where actuator settings may affect the state covariance matrix.
554
555
Incorporating uncertain information into WDS Real-time Control (RTC)
556
Regardless of the method(s) used for quantifying model and predictive (forecast) uncertainty,
557
incorporating such uncertain information into the real-time control processes faces a number of
558
challenges, including educating system controllers on the presentation and interpretation of new
559
information (Frick and Hegg 2011), However, the key challenge to address is how to collapse
560
uncertain information (e.g. an ensemble forecast) into a single control decision. Whether real-time
561
control takes the form of a rule-based decision in response to a system forecast, or an iterative
562
numerical model optimisation (Rao et al. 2007), each model run is typically deterministic. The
563
preceding discussion, however, clearly illustrates that this may not adequately represent system
564
uncertainty.
565
The simplest case for incorporating uncertain information is that an ensemble (Section 5.3) is
566
run for each control option considered, and the posterior uncertainty in the decision variable is
567
collapsed to the ensemble mean, or the location with highest probability (Hall and Solomatine 2008).
568
The ensemble mean can then be compared between control options to determine optimal system
569
control. Error-correction procedures may also be used to reduce uncertainty for each optimisation run.
570
However, collapsing uncertainty to a single metric may identify some optimal operating conditions,
571
but given uncertainty in this prediction, another area of the decision space might be more robust
572
against the model uncertainty.
573
An alternative approach has been considered in WDS design optimisation, where the
574
optimisation objective is set in terms of reducing risk and maximising system robustness (Kapelan et
[Type text]
575
al. 2005; Sun et al. 2011). In such a procedure the risk and robustness objectives are set in
576
probabilistic terms, and for each fitness evaluation (when employing a Genetic Algorithm solver) an
577
ensemble is ran, reflecting the model uncertainty. Kapelan et al. (2005) accounted for demand
578
uncertainty in a WDS design problem, and showed that a small ensemble size (n=10-50) was adequate
579
to characterise the full ensemble Pareto front, with a larger ensemble size (n=1000). Such approaches
580
can be facilitated through application of high performance computing in optimisation problems
581
(Harding and Banzhaf 2007).
582
The probabilistic interpretation of an ensemble of model forecasts has been the subject of
583
debate in the climate research literature (Hall et al. 2007). As model structural uncertainties are not
584
readily measureable, probabilistic representation may only capture part of the full model uncertainty.
585
Fuzzy representations of uncertain variables (e.g. projected future water demand) and separation of
586
aleatory and epistemic uncertainties through evidence theory may provide more useful information to
587
the decision maker (Hall and Solomatine 2008). In addition, approaches for robust decision making
588
when information on system uncertainty is hard to define have been applied, including Info-Gap
589
methods and the Robust Decision Making (RDM) approach (Hall and Solomatine 2008; Hall et al.
590
2012).A number of additional challenges are present when dealing with model uncertainty in real-
591
time control.
592
593
594
uncertainty, meaning it may be difficult to choose the best control procedure.
595
596
First, a number of control solutions may be produced that perform equally well given forecast
Second, the time required to take appropriate actions (e.g. time horizon) may not be known a
priori until modelling is undertaken to predict future conditions.
Third, propagating and reducing uncertainty in real-time requires an increased modelling time,
597
which will require a longer input forecast at the start of the modelling period. As forecast
598
accuracy declines with increased lead time, accounting for this input uncertainty may
599
conversely increase modelling uncertainty.
600
601
Finally, the ability to have models that are valid (calibrated) for difficult to foresee future
conditions, such as pipe burst, remains a challenge.
[Type text]
602
603
Conclusions and Recommendations
604
Uncertainty in WDS model forecasting may originate from measurement error, parameter and
605
initial conditions uncertainty, and also from inherent model structural errors. This paper has presented
606
a framework considering each stage of model development, and reviewed a number of the most
607
promising methods available to quantify and reduce uncertainty at each of these stages. An ideal
608
treatment of uncertainty should proceed through adequate sampling from the relevant posterior
609
distributions that represent uncertainty in parameters and system states, and propagate these samples
610
through the forecasting chain. However, in light of resource limitations, different approximations for
611
dealing with uncertainty may be required at each stage of model development. Figure 2 provides
612
guidance when choosing method(s) for dealing with uncertainty in calibration, data assimilation and
613
model forecasting.
614
It is important to consider, however, that there is no universal method applicable to all cases, and
615
nor is the decision process linear As in the context of flash flood forecasting, any approach for dealing
616
with the cascade of uncertainty will include a mixture of more formal and informal approaches (Cloke
617
and Pappenberger 2009). Thus, decisions regarding which method to adopt are based initially on a
618
conditional yes/no. Iterative development is required in light of new data, and also depending on the
619
extent to which the chosen method reliably informs the decision making process regarding the
620
different forms of uncertainty present in the forecasting procedure (Beven and Alcock 2012; Hall and
621
Solomatine 2008).
622
623
A number of work areas therefore need to be addressed to implement the methods for uncertainty
quantification and reduction considered in this paper, specifically for WDS:
624
1. Methods for dealing with model uncertainty need to be evaluated specifically in WDS, with
625
explicit evaluation of computational speed versus model accuracy/uncertainty quantification.
626
For example, during calibration research is required to determine the optimal trade-off
627
between model structural uncertainty (e.g. skeletonisation) and the ability to constrain
628
distributed system demand;
[Type text]
629
2. Whilst synthetic studies are seen as necessary steps to ensure internal consistency of
630
statistical methods (Renard et al. 2010), many techniques developed in the research literature
631
(e.g. Kang and Lansey 2009) need further evaluation against data from real WDS systems,
632
with real (and often unknown) error structures. Increasing availability of SCADA data should
633
facilitate this development;
634
635
3. Further work is required to quantify and improve the validity of calibrated models and
methods for dealing with uncertainty during anomalous system conditions;
636
4. The added benefit of accounting for model uncertainty needs to be demonstrated specifically
637
for WDS, and also in the RTC context. Such a step is important to encourage water
638
companies to adopt more robust decision making approaches when using model based system
639
control;
640
641
642
643
In order to address these requirements, a number of additional, general guidelines are considered:
5. The final application of the model should guide development, combination and application of
the techniques considered;
644
6. Any approach to uncertainty quantification should be justified a posteriori, using appropriate
645
tests of assumptions embodied in the likelihood function (e.g. Beven et al. 2008; Thyer et al.
646
2009), and tests against more rigorous approaches (Kang and Lansey 2009; Kapelan et al.
647
2007). Such tests should occur prior to propagation where it may be more difficult to
648
disentangle sources of uncertainty;
649
650
651
652
653
654
7. Any method for quantifying uncertainty offline must be applicable for the conditions to which
the model is to be applied;
8. Global sensitivity analysis, considering higher order interactions between parameters should
be applied to help constrain ensemble sizes;
9. Computational Resources should be applied to the most uncertain part of the model
prediction;
[Type text]
655
10.Finally, although the flow of information considered in Figure 2 is largely one way,
656
implementation and development is an iterative process between data and models;
657
information gained during model forecasting should be fed back to guide further data
658
collection and calibration to constrain model predictions and forecasts.
659
660
Acknowledgements
661
This paper has resulted from work conducted as part of 'PREPARED, Enabling Change', a European
662
Commission Seventh Framework project (Grant agreement no.: 244232, 2010-2014). Three
663
anonymous reviewers are also thanked for thorough and constructive comments.
664
6.6 Real-Time Control
System Demand
Offline system measurements
Sensor
4. Calibration and
Parameter Uncertainty
System Process
Initially Calibrated Model
Actuator
Data Processing
Control Decision
Optimisation
State (and Parameter) Estimation
5. Data Assimilation
Rule-Based
Control
Forecasted System Demand
6. Model Forecasting
Control Schedule
Forecast Simulation
Model
665
666
Figure 1. Framework of Modelling in support of real-time WDS control. Numbers refer to specific
667
sections of the review.
668
669
670
671
[Type text]
672
673
674
675
676
677
678
679
680
681
[Type text]
Calibration Linear model with normally distributed parameters?
Y
Optimisation Algorithm
FOSM
Errors sources identifiable?
Explicit Error Model
Y
Informal Bayesian
N
N
Formal Bayesian
Errors sources identifiable?
Informal Likelihood
N
Implicit Error Model
Limits of Acceptability
Y
N
Posterior Diagnostics
Y
Error Model Assumptions Valid?
Data Assimilation
Imprecise Probability
Computationally expensive model for SE?
Y
Data/Process-Model
Driven Meta-model
Ensemble Approach
N
Model errors Gaussian?
Known model/data errors with
(mildly non-) linear model?
Y
Predictor-Corrector
Scheme
Y
N
N
(Extended) Kalman
Filter
Ensemble Kalman
Filter
Iterative Optimisation
Data/Process-Model
Driven Meta-model
Y
Deterministic Forecast
Error-Correction
Y
Deterministic Objective Functions
N
Approximate Ensemble
Forecast
Forecasted Uncertainty
bounds
Optimisation?
Particle Filter
Computationally expensive model for RTC optimisation?
Model Forecasting
N
Evidence Theory
Ensemble Forecast
Optimisation?
N
Risk and Robustness
Objective Functions
Y
Rules Based Control
Rules Based Control
N
Control Decision
Assumptions regarding model uncertainty acceptable?
682
683
Figure 2. Flow diagram illustrating the key decisions and assumptions that need to be considered
684
when dealing with the propagation of model uncertainty.
685
686
[Type text]
687
[Type text]
688
Table 1. Methods applied for quantification of uncertainty during model calibration
Key References
Sampling
Method
Likelihood
Function
Key assumptions, strengths and limitations
GA; GN; GB;
RMSE; (W)LS;
(W)SSE.
Efficient methods for reducing parameter uncertainty, but no
quantification of model uncertainty.
LHS;
FOSM;
Assumes linearity of model response, and Gaussianity of
parameter uncertainty; computationally expensive when
calculating derivatives with respect to calibration parameters.
A more robust means to obtain posterior parameter and
predictive distributions through calibration; implicit and explicit
error models may be defined, with error model parameters to
jointly infer during calibration; posterior parameters are
sensitive to the chosen error model; error model assumptions
should be evaluated using posterior diagnostic checks; explicit
error models are limited by our ability to specify structural and
output error a priori; see Beven et al. (2008), Vrugt et
al.(2009b), Schoups and Vrugt (2010) and (Renard et al. 2010)
for more detail on strengths and limitations.
Optimisation
(Savic et al. 2009)
review paper
FOSM
(Kang and Lansey 2009;
Lansey et al. 2001)
Formal Bayesian Approaches
(Kapelan et al. 2007)
SCEM-UA
SLS.
(Freni and Mannina 2010)
(Schaefli et al. 2007)
(Yang et al. 2007)
MCS
M-H MCMC
M-H MCMC
(Schoups and Vrugt 2010)
DREAM-ZS
(Thyer et al. 2009);
(Renard et al. 2010)
MCMC
ND after BCT of data.
(M)ND with AR1 model
ND after BCT with AR
model. PD checks.
SEPD with AR model and
H Model. PD checks.
Explicit ND with hyper
parameters
Informal Bayesian Approaches
(Beven and Freer 2001);
(Smith et al. 2008a);
(McMillan and Clark 2009)
(Krueger et al. 2010);
(Liu et al. 2009)
MCS;
SCEM-UA
NSE; NSSE; ESE
MCS;
Limits of Acceptability
(LA) evaluates model
performance at each
time-step considering
uncertainty in output
data.
A range of informal likelihood error models have been applied
(Smith et al. 2008a), with flexibility depending on the specific
problem; informal error models are less sensitive to overconditioning the posterior parameter distribution; parameter
and predictive uncertainty is sensitive to subjective, user
defined thresholds; LA approach also reveals general problems
found with Explicit formal error models: input errors can be
difficult to disentangle from model structural errors; See
Beven et al. (2008), Vrugt et al.(2009b), Mantovan and Todini
(2006) and Stedinger et al. (2008) for mode detail on strengths
and limitations.
Possibilistic, and Evidence Theory Approaches
689
(Branisavljevic et al. 2009;
Revelli and Ridolfi 2002);
NT/GA
sampling
Fuzzy membership of
states and parameters
(Fu and Kapelan 2011)
LHS;GA
Fuzzy membership
(Fu and Kapelan, in press)
MCS
-
Output distribution dependent on prior parameter and/or
demand uncertainty. Not used for calibration but to represent
input uncertainty
Propagation of fuzzy probabilities in WDS design. Approach to
separate out epistemic and aleatory uncertainty.
Combines fuzzy representation of parameter uncertainty with a
probabilistic representation of input (rainfall) uncertainty.
GA, genetic algorithm; GN, Gauss-Newton technique; NT, Newton Technique; GB, Gradient-Based optimisation; FOSM, First-Order
Second-Moment; SCEM-UA, Shuffled Complex Evolution Metropolis algorithm; RMSE, Root Mea Square Error; (W)LS, (Weighted) Least
Squares; (W)SSE, (Weighted) Sum Squared Errors; LHS, Latin Hypercube Sampling; (M)ND, (Mixture) Normal Distribution; MCS, Monte
Carlo Simulation; M-H, Metropolis-Hastings; MCMC, Markov Chain Monte Carlo; AR, Autoregressive Model; BCT, Box-Cox
Transformation; PD, Posterior Diagnostics; DREAM-ZS, DiffeRential Evolution Adaptive Metropolis Algorithm; SEPD, Skewed
Exponential Power Density; H, Heteroscedastic; (E)NSE, (Extended) Nash-Sutcliffe Efficiency; NSSE, Normalised Sum Square Errors; LA,
Limits of Acceptability.
690
691
692
693
694
695
[Type text]
696
Table 2. Methods applied for Data Assimilation and Joint State and Parameter Estimation
697
Key Reference
Model/Algorithm
Uncertainty
Key assumptions, strengths and limitations
Quantification
Parameter
Key assumptions, strengths and limitations
Uncertainty
Key References
State
Update
Predictor-Corrector Schemes
(Todini 1999);
(Shang et al. 2006)
(Preis et al. 2011)
KF
EKF
GA
APP
APP
APP
(Davidson and Bouchart
2006)
(Kang and Lansey 2009)
WLS
APP
TSE
APP
ND error model for demand observation errors; Model linearity required;
Assumed Gaussianity of errors; Requires Linear adjoint model.
GA to solve real-time optimisation; incorporated measurement error into
calibration; may be expensive computationally in real-time.
Assumes demand and roughness if correct; does not provide the upper and
lower bounds of solutions that satisfy SCADA constraints.
Iterative filter application may be expensive computationally, and can only
occur once the data are available. Model linearity required for KF, which is
sensitive to specification of observation errors; Testing required for real
data.
Ensemble Based Approaches
(Clark et al. 2008);
(Pu and Hacker 2009);
(Evensen 2003)
EnKF; EnSRF;
EnAKF;
EnTKF;
(Weerts and El Serafy
PF-RR;
2006); (van Leeuwen
2009; van Leeuwen 2010);
APP
-
EnKF method is the most sensitive to ensemble size; EnKF perturbs
observations prior to assimilation, which may increase sampling error;
assimilation performance is sensitive to (specification of) observation errors;
EnKF might be limited in strongly nonlinear systems; Kalman Filter based
approaches modify system states which could lead to model instability.
PF performed better than EnKF with larger ensemble sizes (32-128); PF does
not make assumptions about model linearity; PF may require large ensemble
sizes to overcome problems of filter degeneracy and sample
impoverishment; EnKF found to be less sensitive to specification of model
and measurement error; EnKF modification to the proposal density to draw
PF to future observations, reduced required ensemble size. See van Leeuwen
(2009) for methodological details.
Joint State and Parameter Estimation
(Moradkhani et al. 2005b) EnKF
EnKF
Separate EnKF update for States and Parameters; Inputs perturbed for state
update, kernel smoother for parameter perturbation; Computational
expensive for joint update in real-time;
(Moradkhani et al.
2005a); (Salamon and
Feyen 2009)
PF(RR);
PF(SIR).
Perturbed at
each time step
(Brdys and Chen 1994)
RBB
-
Posterior predictive distribution of model parameters and states at each
time-step; Computationally expensive for joint update in real-time; Error
model assumptions also require posterior evaluation (see Table 1: Formal
Bayesian Approaches).
Joint inference of demand and roughness.
(Kang and Lansey 2011)
Iterative two
step WLS
Iterative two
step WLS
Demand and roughness optimised using separate weighting schemes for
pipe flow and nodal pressure in each iteration.
KF, Kalman Fitler; APP, A priori parameters; GA, Genetic Algorithm; WLS, Weighted Least Squares; TSE, Tracking State Estimator; EnKF,
Ensemble Kalman Filter; EnSRF, Ensemble Square Root Filter; EnAKF, Ensemble Adjusted Kalman Filter; EnTKF, Ensmeble Transform
Kalman Filter; PF, Particle Filter; RR, Residual Resampling; SIR, Sequential Importance Resampling; RBB; Recursive Branch and Bound.
698
699
700
701
702
703
704
[Type text]
705
Reduced and Data-Driven Models
(Preis et al. 2011)
RM, skeletonised
EPANET2 model
None
(Rao and Salomons
2007);
(Broad et al. 2010)
GA-ANN for control
optimisation
None
Ensemble and Approximate Forecasts
(Pappenberger et
al. 2005); (Zappa
et al. 2011)
IL for offline
calibration; Ensemble
Forecast.
Approximate
ensemble of input
and parameter
uncertainty
(Shrestha et al.
2009)
ANN; GLUE
Offline calibration
of error bounds
applied to forecast
(Hostache et al.
2011)
BMG model for
representing
forecasting error; linear
correction for model
error
Posterior Predictive
Uncertainty in
Forecast for
integrated model
errors
ANN; AR; LTF; NARXM
Error correction
only
Skeletonised EPANET2 models can simulate overall network
performance; Model performance should be compared to706
full
model performance to evaluate the effect of skeletonisation;
Skeletonisation affects simulation of pressure surge, demand
satisfaction predictions, and contaminant consequence 707
assessment.
708
ANN trained offline to hydraulic model scenarios; Data-driven
metamodels can speed up computational time, making them a
suitable alternative for real-time modelling, forecasting and
709
system performance optimisation; Data-driven models should
be calibrated using methods to account for uncertainty, and
710
errors in original physically based model.
Sensitivity Analysis of model parameters can help chose 711
representative samples from the posterior parameter
712
distribution; computational resources should be directed to
represent the factor that introduces the most uncertainty into
the model forecast; method requires comparison to more713
thorough ensemble forecasts to evaluate robustness.
Reliant on the strength of the error assumptions made during
714
the initial calibration; data-driven models should be calibrated
using methods to account for uncertainty, and errors in
715
original physically based model. Results should be compared
to ensemble error bounds.
Gaussianity assumption of errors does not always hold. 716
717
718
Error-Correction
(Abebe and Price
2003); (Goswami
et al. 2005)
Errors made during calibration are the only errors corrected,
719
which may not include errors in the forecasted input
conditions, an additional and potentially significant source of
uncertainty.
720
Error in all model states reduced through state updating;
the strength of the relationship between model errors at
721
observation points and other states in the system may be
controlled in WDS by control structures (e.g pumps and
722
valves), which may limit application.
(Madsen and
Error Correction
Uncertainty
Skotner 2005);
applied to all model
reduction via DA
(Canizares et al.
states using gain
2001);
functions determined
(Mancarella et al. offline.
2008)
723
RM, Reduced Model; GA, Genetic Algorithm; ANN, Artificial Neural Network; GLUE, Generalised Likelihood Uncertainty Estimation;
IL,
Informal Likelihood Functions; BMG, Bivariate Meta Gaussian Model; AR, Autoregressive; LTF, Linear Transfer Function; NARXM,
Non-linear, Auto-Regressive eXogenous input Model.
724
725
Table 3. Methods applied to quantify and reduce error in model forecasting
726
727
728
729
730
731
732
[Type text]
733
734
References
735
736
737
738
739
740
741
742
743
744
745
746
747
748
749
750
751
752
753
754
755
756
757
758
759
760
761
762
763
764
765
766
767
768
769
770
771
772
773
774
775
776
777
778
779
780
781
782
783
784
Abebe, A. J., and Price, R. K. (2003). "Managing uncertainty in hydrological models using complementary models."
Hydrological Sciences Journal-Journal Des Sciences Hydrologiques, 48(5), 679-692.
Arbues, F., Garica-Valinas, M. A., and Martinez-Espineira, R. (2003). "Estimation of residential water demand: a
state-of-the-art review." Journal of Socio-Economics, 32, 81-102.
Arulampalam, M. S., Maskell, S., Gordon, N., and Clapp, T. (2002). "A tutorial on particle filters for online
nonlinear/non-Gaussian Bayesian tracking." Ieee Transactions on Signal Processing, 50(2), 174-188.
Bahadur, R., Johnson, J., Janke, R., and Samuels, W. B. (2006). "Impact of Model Skeletonization on Water
Distribution Model Parameters as Related to Water Quality and Contaminant Consequence Assessment."
8th Annual Water Distribution Systems Analysis Symposium, CIncinati, Ohio, USA.
Bakker, K. J. (2003). "From public to private to ... mutual? - Restructuring water supply governance in England and
Wales." Geoforum, 34(3), 359-374.
Bargiela, A., and Hainsworth, G. D. (1989). "Pressure and Flow Uncertainty in Water-Systems." Journal of Water
Resources Planning and Management-Asce, 115(2), 212-229.
Bates, B. C., and Campbell, E. P. (2001). "A Markov chain Monte Carlo scheme for parameter estimation and
inference in conceptual rainfall-runoff modeling." Water Resources Research, 37(4), 937-947.
Bertrand-Krajewski, J. L., Bardin, J. P., Mourad, M., and Beranger, Y. (2003). "Accounting for sensor calibration,
data validation, measurement and sampling uncertainties in monitoring urban drainage systems." Water
Science and Technology, 47(2), 95-102.
Beven, K. (2006). "A manifesto for the equifinality thesis." Journal of Hydrology, 320(1-2), 18-36.
Beven, K., and Binley, A. (1992). "The Future of Distributed Models - Model Calibration and Uncertainty
Prediction." Hydrological Processes, 6(3), 279-298.
Beven, K., and Freer, J. (2001). "Equifinality, data assimilation, and uncertainty estimation in mechanistic
modelling of complex environmental systems using the GLUE methodology." Journal of Hydrology, 249(14), 11-29.
Beven, K. J., and Alcock, R. E. (2012). "Modelling everything everywhere: a new approach to decision-making for
water management under uncertainty." Freshwater Biology, 57, 124-132.
Beven, K. J., Smith, P. J., and Freer, J. E. (2008). "So just why would a modeller choose to be incoherent?" Journal
of Hydrology, 354(1-4), 15-32.
Bicik, J., Kapelan, Z., Makropoulos, C., and Savic, D. (2011a). "Pipe burst diagnostics using evidence theory."
Journal of Hydroinformatics, 13(4), 596-608.
Bicik, J., Kapelan, Z., and Savić, D. (2011b). "Challenges in the implementation of a DSS for real-time WDS
management." Computing and Control in the Water Industry 2011, University of Exeter.
Boulos, P. F., Lansey, K. E., and Karney, B. W. (2004). Comprehensive Water Distribution Systems Analysis
Handbook For Engineers and Planners, MWH Soft, Inc., Pasadena, California.
Box, G. E. P., and Cox, D. R. (1982). "An Analysis of Transformations Revisited, Rebutted." Journal of the American
Statistical Association, 77(377), 209-210.
Branisavljevic, N., Kapelan, Z., and Prodanovic, D. (2010). "Online time data series pre-processing for the
improved performance of anomaly detection methods." Integrating water systems: Proceedings of the
Tenth International Conference on Computing and Control for the Water Industry, CCWI 2009 'Integrating
Water Systems', Sheffield, UK.
Branisavljevic, N., Prodanovic, D., and Ivetic, M. (2009). "Uncertainty reduction in water distribution network
modelling using system inflow data." Urban Water Journal, 6(1), 69-79.
Brdys, M. A., and Chen, K. (1994). "Joint State and Parameter Estimation of Dynmaic Water Supply System Under
bounded Uncertainty Using Geometric Programming." 10th IFAC Symposium of System Identification,
Copenhagen, Denmark, 331-336.
Broad, D. R., Maier, H. R., and Dandy, G. C. (2010). "Optimal Operation of Complex Water Distribution Systems
Using Metamodels." Journal of Water Resources Planning and Management-Asce, 136(4), 433-443.
Burgers, G., van Leeuwen, P. J., and Evensen, G. (1998). "Analysis scheme in the ensemble Kalman filter." Monthly
Weather Review, 126(6), 1719-1724.
[Type text]
785
786
787
788
789
790
791
792
793
794
795
796
797
798
799
800
801
802
803
804
805
806
807
808
809
810
811
812
813
814
815
816
817
818
819
820
821
822
823
824
825
826
827
828
829
830
831
832
833
834
835
836
837
838
Bush, C. A., and Uber, J. G. (1998). "Sampling design methods for water distribution model calibration." Journal of
Water Resources Planning and Management-Asce, 124(6), 334-344.
Canizares, R., Madsen, H., Jensen, H. R., and Vested, H. J. (2001). "Developments in operational shelf sea
modelling in Danish waters." Estuarine Coastal and Shelf Science, 53(4), 595-605.
Clark, M. P., Rupp, D. E., Woods, R. A., Zheng, X., Ibbitt, R. P., Slater, A. G., Schmidt, J., and Uddstrom, M. J. (2008).
"Hydrological data assimilation with the ensemble Kalman filter: Use of streamflow observations to
update states in a distributed hydrological model." Advances in Water Resources, 31(10), 1309-1324.
Cloke, H. L., and Pappenberger, F. (2009). "Ensemble flood forecasting: A review." Journal of Hydrology, 375(3-4),
613-626.
Cutore, P., Campisano, A., Kapelan, Z., Modica, C., and Savic, D. (2008). "Probabilistic prediction of urban water
consumption using the SCEM-UA algorithm." Urban Water Journal, 5(2), 125-132.
Davidson, J. W., and Bouchart, F. J. C. (2006). "Adjusting nodal demands in SCADA constrained real-time water
distribution network models." Journal of Hydraulic Engineering-Asce, 132(1), 102-110.
Deletic, A., Dotto, C. B. S., McCarthy, D. T., Kleidorfer, M., Freni, G., Mannina, G., Uhl, M., Henrichs, M., Fletcher,
T. D., Rauch, W., Bertrand-Krajewski, J. L., and Tait, S. (2011). "Assessing uncertainties in urban drainage
models." Physical and Chemistry of the Earth, doi:10.1016/j.pce.2011.04.007.
Draper, D. (1995). "Assessment and Propagation of Model Uncertainty." Journal of the Royal Statistical Society
Series B-Methodological, 57(1), 45-97.
Dubois, D. (2010). "Representation, Propagation, and Decision Issues in Risk Analysis Under Incomplete
Probabilistic Information." Risk Analysis, 30(3), 361-368.
Evensen, G. (2003). "The Ensemble Kalman Filter: theoretical formulation and practical implementation." Ocean
Dynamics, 53, 343-367.
Freni, G., and Mannina, G. (2010). "Bayesian approach for uncertainty quantification in water quality modelling:
The influence of prior distribution." Journal of Hydrology, 392(1-2), 31-39.
Frick, J., and Hegg, C. (2011). "Can end-users' flood management decision making be improved by information
about forecast uncertainty?" Atmospheric Research, 100(2-3), 296-303.
Fu, G., and Kapelan, Z. (in press). "Flood analysis of urban drainage systems: probabilistic dependence structure of
rainfall characteristics and fuzzy model parameters." Journal of Hydroinformatics.
Fu, G. T., and Kapelan, Z. (2011). "Fuzzy probabilistic design of water distribution networks." Water Resources
Research, 47.
Gallagher, M., and Doherty, J. (2007). "Parameter estimation and uncertainty analysis for a watershed model."
Environmental Modelling & Software, 22(7), 1000-1020.
Giustolisi, O. (2010). "Considering Actual Pipe Connections in Water Distribution Network Analysis." Journal of
Hydraulic Engineering-Asce, 136(11), 889-900.
Giustolisi, O., Kapelan, Z., and Savic, D. (2008a). "Extended Period Simulation Analysis Considering Valve
Shutdowns." Journal of Water Resources Planning and Management-Asce, 134(6), 527-537.
Giustolisi, O., Savic, D., and Kapelan, Z. (2008b). "Pressure-driven demand and leakage simulation for water
distribution networks." Journal of Hydraulic Engineering-Asce, 134(5), 626-635.
Goswami, M., O'Connor, K. M., Bhattarai, K. P., and Shamseldin, A. Y. (2005). "Assessing the performance of eight
real-time updating models and procedures for the Brosna River." Hydrology and Earth System Sciences,
9(4), 394-411.
Guidolin, M., Savic, D., and Kapelan, Z. (2011). "Computational performance analysis and improvment of the
demand-driven hydraulic solver for the CWSNET library." Computing and Control in the Water Industry
(CCWI), Exeter, UK.
Hall, J., Fu, G. T., and Lawry, J. (2007). "Imprecise probabilities of climate change: aggregation of fuzzy scenarios
and model uncertainties." Climatic Change, 81(3), 265-281.
Hall, J., and Solomatine, D. (2008). "A framework for uncertainty analysis in flood risk management decisions."
International Journal of River Basin Management, 6(2), 85-98.
Hall, J. W. (2003). "Handling uncertainty in the hydroinformatic process." Journal of Hydroinformatics, 5, 215-232.
Hall, J. W., Lempert, R. J., Keller, K., Hackbarth, A., Mijere, C., and McInerney, D. J. (2012). "Robust Climate Policies
Under Uncertainty: A Comparison of Robust Decision Making and Info-Gap Methods." Risk Analysis, doi:
10.1111/j.1539-6924.2012.01802.x.
Harding, S., and Banzhaf, W. (2007). "Fast genetic programming on GPUs." Genetic Programming, Proceedings,
4445, 90-101.
[Type text]
839
840
841
842
843
844
845
846
847
848
849
850
851
852
853
854
855
856
857
858
859
860
861
862
863
864
865
866
867
868
869
870
871
872
873
874
875
876
877
878
879
880
881
882
883
884
885
886
887
888
889
890
891
892
Hargreaves, J. C., Annan, J. D., Edwards, N. R., and Marsh, R. (2004). "An efficient climate forecasting method
using an intermediate complexity Earth System Model and the ensemble Kalman filter." Climate
Dynamics, 23(7-8), 745-760.
Hart, W. E., and Murray, R. (2010). "Review of Sensor Placement Strategies for Contamination Warning Systems in
Drinking Water Distribution Systems." Journal of Water Resources Planning and Management-Asce,
136(6), 611-619.
Helton, J. C., Johnson, J. D., and Oberkampf, W. L. (2004). "An exploration of alternative approaches to the
representation of uncertainty in model predictions." Reliability Engineering & System Safety, 85(1-3), 3971.
Herrera, M., Torgo, L., Izquierdo, J., and Perez-Garcia, R. (2010). "Predictive models for forecasting hourly urban
water demand." Journal of Hydrology, 387(1-2), 141-150.
Hostache, R., Matgen, P., Montanari, A., Montanari, M., Hoffmann, L., and Pfister, L. (2011). "Propagation of
uncertainties in coupled hydro-meteorological forecasting systems: A stochastic approach for the
assessment of the total predictive uncertainty." Atmospheric Research, 100(2-3), 263-274.
Hoteit, I., Korres, G., and Triantafyllou, G. (2005). "Comparison of extended and ensemble based Kalman filters
with low and high resolution primitive equation ocean models." Nonlinear Processes in Geophysics, 12(5),
755-765.
Hutton, C. J., Vamakeridou-Lyroudia, L. S., Kapelan, Z., and Savic, D. (2011). "Uncertainty Quantifcation and
Reduction in Urban Water Systems Modelling: Evaluation Report." PREPARED: Enabling Change, Work
Package 3.6, European Commision 7th Framework Programme.
Jacobsen, L. B., and Kamojjala. (2009). "Tools and processes for calibrating large all-pipes models." Urban Water
Journal, 6(1), 29-38.
Jamieson, D. G., Shamir, U., Martinez, F., and Franchini, M. (2007). "Conceptual design of a generic, real-time,
near-optimal control system for water-distribution networks." Journal of Hydroinformatics, 9(1), 3-14.
Jonkergouw, P. M. R., Khu, S. T., Kapelan, Z. S., and Savic, D. A. (2008). "Water quality model calibration under
unknown demands." Journal of Water Resources Planning and Management-Asce, 134(4), 326-336.
Jung, B. S., Boulos, P. F., and Wood, D. J. (2007). "Pitfalls of water distribution model skeletonization for surge
analysis." Journal American Water Works Association, 99(12), 87-98.
Kang, D., and Lansey, K. (2009). "Real-Time Demand Estimation and Confidence Limit Analysis for Water
Distribution Systems." Journal of Hydraulic Engineering-Asce, 135(10), 825-837.
Kang, D. S., and Lansey, K. (2011). "Demand and Roughness Estimation in Water Distribution Systems." Journal of
Water Resources Planning and Management-Asce, 137(1), 20-30.
Kang, D. S., Pasha, M. F. K., and Lansey, K. (2009). "Approximate methods for uncertainty analysis of water
distribution systems." Urban Water Journal, 6(3), 233-249.
Kapelan, Z. S., Savic, D. A., and Walters, G. A. (2005). "Multiobjective design of water distribution systems under
uncertainty." Water Resources Research, 41(11).
Kapelan, Z. S., Savic, D. A., and Walters, G. A. (2007). "Calibration of water distribution hydraulic models using a
Bayesian-Type procedure." Journal of Hydraulic Engineering-Asce, 133(8), 927-936.
Kavetski, D., Kuczera, G., and Franks, S. W. (2006a). "Bayesian analysis of input uncertainty in hydrological
modeling: 1. Theory." Water Resources Research, 42(3).
Kavetski, D., Kuczera, G., and Franks, S. W. (2006b). "Bayesian analysis of input uncertainty in hydrological
modeling: 2. Application." Water Resources Research, 42(3).
Khu, S. T., Liong, S. Y., Babovic, V., Madsen, H., and Muttil, N. (2001). "Genetic programming and its application in
real-time runoff forecasting." Journal of the American Water Resources Association, 37(2), 439-451.
Kleiner, Y., and Rajani, B. (2001). "Comprehensive review of structural deterioration of water mains: statistical
models." Urban Water 3, 131-150.
Komma, J., Bloschl, G., and Reszler, C. (2008). "Soil moisture updating by Ensemble Kalman Filtering in real-time
flood forecasting." Journal of Hydrology, 357(3-4), 228-242.
Krueger, T., Freer, J., Quinton, J. N., Macleod, C. J. A., Bilotta, G. S., Brazier, R. E., Butler, P., and Haygarth, P. M.
(2010). "Ensemble evaluation of hydrological model hypotheses." Water Resources Research, 46.
Lane, S. N. (2005). "Roughness - time for a re-evaluation?" Earth Surface Processes and Landforms, 30(2), 251253.
Lansey, K. E., El-Shorbagy, W., Ahmed, I., Araujo, J., and Haan, C. T. (2001). "Calibration assessment and data
collection for water distribution networks." Journal of Hydraulic Engineering-Asce, 127(4), 270-279.
[Type text]
893
894
895
896
897
898
899
900
901
902
903
904
905
906
907
908
909
910
911
912
913
914
915
916
917
918
919
920
921
922
923
924
925
926
927
928
929
930
931
932
933
934
935
936
937
938
939
940
941
942
943
944
945
946
Lekkas, D. F., Imrie, C. E., and Lees, M. J. (2001). "Improved non-linear transfer function and nerual network
methods of flow routing for real-time forecasting." Journal of Hydroinformatics, 3, 153-164.
Liu, Y. L., Freer, J., Beven, K., and Matgen, P. (2009). "Towards a limits of acceptability approach to the calibration
of hydrological models: Extending observation error." Journal of Hydrology, 367(1-2), 93-103.
Liu, Y. Q., and Gupta, H. V. (2007). "Uncertainty in hydrologic modeling: Toward an integrated data assimilation
framework." Water Resources Research, 43(7), -.
Lopez-Ibanez, M., Prasad, D. T., and Paechter, B. (2008). "Parallel Optimisation of pump schedules with a threadsafe variant of epanet toolkit." Proceedings of the 10th Annual Water Distribution Systems Analysis
Conference WDSA2008, Kruger National Park, South Africa.
Machell, J., Mounce, S. R., and Boxall, J. B. (2010). "Online modelling of water distribution systems: a UK case
study." Drinking Water Engineering and Science, 3, 21-27.
Madsen, H., and Skotner, C. (2005). "Adaptive state updating in real-time river flow forecasting - a combined
filtering and error forecasting procedure." Journal of Hydrology, 308(1-4), 302-312.
Mancarella, D., Babovic, V., Keijzer, M., and Simeone, V. (2008). "Data assimilation of forecasted errors in
hydrodynamic models using inter-model correlations." International Journal For Numerical Methods in
Fluids, 56, 597-605.
Mantovan, P., and Todini, E. (2006). "Hydrological forecasting uncertainty assessment: Incoherence of the GLUE
methodology." Journal of Hydrology, 330(1-2), 368-381.
Martinez, F., Hernandez, V., Alonso, J. M., Rao, Z. F., and Alvisi, S. (2007). "Optimizing the operation of the
Valencia water-distribution network." Journal of Hydroinformatics, 9(1), 65-78.
Matgen, P., Montanari, M., Hostache, R., Pfister, L., Hoffmann, L., Plaza, D., Pauwels, V. R. N., De Lannoy, G. J. M.,
De Keyser, R., and Savenije, H. H. G. (2010). "Towards the sequential assimilation of SAR-derived water
stages into hydraulic models using the Particle Filter: proof of concept." Hydrology and Earth System
Sciences, 14(9), 1773-1785.
McMillan, H., and Clark, M. (2009). "Rainfall-runoff model calibration using informal likelihood measures within a
Markov chain Monte Carlo sampling scheme." Water Resources Research, 45.
Menaia, J., Coelho, S. T., Lopes, A., Fonte, E., and Palma, J. (2003). "Dependency of bulk chlorine decay rates on
flow.velocity in water distribution networks." 3rd World Water Congress: Water Services Management,
Operations and Monitoring, 3(1-2), 209-214.
Merz, B., and Thieken, A. H. (2005). "Separating natural and epistemic uncertainty in flood frequency analysis."
Journal of Hydrology, 309(1-4), 114-132.
Misiunas, D., Lambert, M., Simpson, A., and Olsson, G. (2005). "Burst detection and location in water distribution
networks." Efficient Use and Management of Urban Water Supply (Efficient 2005), 5(3-4), 71-80.
Moradkhani, H., Hsu, K. L., Gupta, H., and Sorooshian, S. (2005a). "Uncertainty assessment of hydrologic model
states and parameters: Sequential data assimilation using the particle filter." Water Resources Research,
41(5), -.
Moradkhani, H., Sorooshian, S., Gupta, H. V., and Houser, P. R. (2005b). "Dual state-parameter estimation of
hydrological models using ensemble Kalman filter." Advances in Water Resources, 28(2), 135-147.
Muste, M., Lee, K., and Bertrand-Krajewski, J. L. (2012). "Standardized uncertainty analysis for hydrometry: a
review of relevant approaches and implementation examples." Hydrological Sciences Journal-Journal Des
Sciences Hydrologiques, 57(4), 643-667.
Nasseri, M., Moeini, A., and Tabesh, M. (2010). "Forecasting monthly urban water demand using Extended
Kalman Filter and Genetic Programming." Expert systems with Applications, Article in Press, corrected
proof.
Noh, S. J., Tachikawa, Y., Shiiba, M., and Kim, S. (2011). "Applying sequential Monte Carlo methods into a
distributed hydrologic model: lagged particle filtering approach with regularization." Hydrology and Earth
System Sciences, 8, 3383-3420.
Ofwat. (2005). "Water Framework Directive - Economic Analysis of Water Industry Costs. Final Report." Ofwat,
UK. Ove Arup and Partners Ltd, In association with Oxera Consulting Ltd.
Ogden, S., and Watson, R. (1999). "Corporate performance and stakeholder management: Balancing shareholder
and customer interests in the UK privatized water industry." Academy of Management Journal, 42(5),
526-538.
Ozger, S., and Mays, L. W. (2004). "Optimal Location of Isolation Valves: A Reliability Approach." Water Supply
Systems Security, L. W. Mays, ed., McGraw-Hill, New York.
[Type text]
947
948
949
950
951
952
953
954
955
956
957
958
959
960
961
962
963
964
965
966
967
968
969
970
971
972
973
974
975
976
977
978
979
980
981
982
983
984
985
986
987
988
989
990
991
992
993
994
995
996
997
998
999
Pappenberger, F., Beven, K. J., Hunter, N. M., Bates, P. D., Gouweleeuw, B. T., Thielen, J., and de Roo, A. P. J.
(2005). "Cascading model uncertainty from medium range weather forecasts (10 days) through a rainfallrunoff model to flood inundation predictions within the European Flood Forecasting System (EFFS)."
Hydrology and Earth System Sciences, 9(4), 381-393.
Pauwels, V. R. N., and De Lannoy, G. J. M. (2006). "Improvement of modeled soil wetness conditions and
turbulent fluxes through the assimilation of observed discharge." Journal of Hydrometeorology, 7(3), 458477.
Pham, D. T. (2001). "Stochastic methods for sequential data assimilation in strongly nonlinear systems." Monthly
Weather Review, 129(5), 1194-1207.
Preis, A., Whittle, A. J., Ostfeld, A., and Perelman, L. (2010). "On-line hydraulic state estimation in urban water
networks using reduced models." Integrating Water Systems, 319-324.
Preis, A., Whittle, A. J., Ostfeld, A., and Perelman, L. (2011). "Efficient Hydraulic State Estimation Technique Using
Reduced Models of Urban Water Networks." Journal of Water Resources Planning and ManagementAsce, 137(4), 343-351.
Pu, Z. X., and Hacker, J. (2009). "Ensemble-based Kalman filters in strongly nonlinear dynamics." Advances in
Atmospheric Sciences, 26(3), 373-380.
Rao, Z. F., and Salomons, E. (2007). "Development of a real-time, near-optimal control process for waterdistribution networks." Journal of Hydroinformatics, 9(1), 25-37.
Rao, Z. F., Wicks, J., and West, S. (2007). "Optimising water supply and distribution operations." Proceedings of
the Institution of Civil Engineers-Water Management, 160(2), 95-101.
Reichle, R. H., Walker, J. P., Koster, R. D., and Houser, P. R. (2002). "Extended versus ensemble Kalman filtering for
land data assimilation." Journal of Hydrometeorology, 3(6), 728-740.
Renard, B., Kavetski, D., Kuczera, G., Thyer, M., and Franks, S. W. (2010). "Understanding predictive uncertainty in
hydrologic modeling: The challenge of identifying input and structural errors." Water Resources Research,
46, -.
Revelli, R., and Ridolfi, L. (2002). "Fuzzy approach for analysis of pipe networks." Journal of Hydraulic EngineeringAsce, 128(1), 93-101.
Rossman, L. A. (2000). EPANET2 Users Manual National Risk Management Research Laboratory, U.S.
Environmental Protection Agency,
http://www.image.unipd.it/salandin/IngAmbientale/Progetto_2/EPANET/EN2manual.pdf, Cincinnati, OH
45268, USA.
Ruggaber, T. P., Talley, J. W., and Montestruque, L. A. (2007). "Using Embedded Sensor Networks to Monitoring,
Control, and Reduce CSO Events: A Pilot Study." Environmental Engineering Science, 24(2), 172-182.
Sadiq, R., Kleiner, Y., and Rajani, B. (2006). "Estimating risk of contaminant intrusion in water distribution
networks using Dempster-Shafer theory of evidence." Civil Engineering and Environmental Systems, 23(3),
129-141.
Salamon, P., and Feyen, L. (2009). "Assessing parameter, precipitation, and predictive uncertainty in a distributed
hydrological model using sequential data assimilation with the particle filter." Journal of Hydrology,
376(3-4), 428-442.
Salamon, P., and Feyen, L. (2010). "Disentangling uncertainties in distributed hydrological modeling using
multiplicative error models and sequential data assimilation." Water Resources Research, 46.
Salomons, E., Goryashko, A., Shamir, U., Rao, Z. F., and Alvisi, S. (2007). "Optimizing the operation of the Haifa-A
water-distribution network." Journal of Hydroinformatics, 9(1), 51-64.
Saltelli, A., Ratto, M., Tarantola, S., Campolongo, F., Commission, E., and Ispra, J. R. C. (2006). "Sensitivity analysis
practices: Strategies for model-based inference." Reliability Engineering & System Safety, 91(10-11),
1109-1125.
Savic, D. A., Kapelan, Z. S., and Jonkergouw, P. M. R. (2009). "Quo vadis water distribution model calibration?"
Urban Water Journal, 6(1), 3-22.
Schaefli, B., Talamba, D. B., and Musy, A. (2007). "Quantifying hydrological modeling errors through a mixture of
normal distributions." Journal of Hydrology, 332(3-4), 303-315.
Schilperoort, R. P. S., Dirksen, J., and Clemens, F. H. L. R. (2008). "Practical aspects for long-term monitoring
campaigns: pifals to avoid to maximise data yield." 11th International Conference on Urban Drainage,
Edinburgh, Scotland, UK.
[Type text]
1000
1001
1002
1003
1004
1005
1006
1007
1008
1009
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
1021
1022
1023
1024
1025
1026
1027
1028
1029
1030
1031
1032
1033
1034
1035
1036
1037
1038
1039
1040
1041
1042
1043
1044
1045
1046
1047
1048
1049
1050
1051
1052
1053
Schoups, G., and Vrugt, J. A. (2010). "A formal likelihood function for parameter and predictive inference of
hydrologic models with correlated, heteroscedastic, and non-Gaussian errors." Water Resources
Research, 46, -.
Shamseldin, A. Y., and O'Connor, K. M. (2001). "A non-linear neural network technique for updating of river flow
forecasts." Hydrology and Earth System Sciences, 5(4), 577-597.
Shang, F., Uber, J. G., van Bloemen Waanders, B. G., Boccelli, D., and Janke, R. (2006). "Real Time Water Demand
Estimation in Water Distribution System." 8th Annial water Distribution Systems Analysis Symposium,
Cincinnati, Ohio, USA.
Shrestha, D. L., Kayastha, N., and Solomatine, D. P. (2009). "A novel approach to parameter uncertainty analysis of
hydrological models using neural networks." Hydrology and Earth System Sciences, 13(7), 1235-1248.
Smith, P., Beven, K. J., and Tawn, J. A. (2008a). "Informal likelihood measures in model assessment: Theoretic
development and investigation." Advances in Water Resources, 31(8), 1087-1100.
Smith, P. J., Beven, K. J., and Tawn, J. A. (2008b). "Detection of structural inadequacy in process-based
hydrological models: A particle-filtering approach." Water Resources Research, 44(1), -.
Snyder, C., Bengtsson, T., Bickel, P., and Anderson, J. (2008). "Obstacles to High-Dimensional Particle Filtering."
Monthly Weather Review, 136(12), 4629-4640.
Sorooshian, S., and Dracup, J. A. (1980). "Stochastic Parameter-Estimation Procedures for Hydrologic RainfallRunoff Models - Correlated and Heteroscedastic Error Cases." Water Resources Research, 16(2), 430-442.
Stedinger, J. R., Vogel, R. M., Lee, S. U., and Batchelder, R. (2008). "Appraisal of the generalized likelihood
uncertainty estimation (GLUE) method." Water Resources Research, 44, -.
Storey, M. V., van der Gaag, B., and Burns, B. P. (2011). "Advances in on-line drinking water quality monitoring
and early warning systems." Water Research, 45(2), 741-747.
Sun, S. (2010). "Decision-Making under Uncertainty: Optimal Storm Sewer Network Design Considering Flood
Risk," Unpublished PhD, University of Exeter.
Sun, S., Khu, S. T., Kapelan, Z., and Djordjevic, S. (2011). "A fast approach for multiobjective design of water
distribution networks under demand uncertainty." Journal of Hydroinformatics, 13(2), 143-152.
Thyer, M., Renard, B., Kavetski, D., Kuczera, G., Franks, S. W., and Srikanthan, S. (2009). "Critical evaluation of
parameter consistency and predictive uncertainty in hydrological modeling: A case study using Bayesian
total error analysis." Water Resources Research, 45, -.
Tippett, M. K., Anderson, J. L., Bishop, C. H., Hamill, T. M., and Whitaker, J. S. (2003). "Ensemble square root
filters." Monthly Weather Review, 131(7), 1485-1490.
Todini, E. (1999). "Using a kalman filter approach for looped water distribution network calibration." Water
industry systems: modelling and optimization applications, Volume 1., D. A. Savic and G. A. Walters, eds.,
Research Studies Press, Baldock, Hertforshire, England, 327-336.
van Leeuwen, P. J. (2009). "Particle Filtering in Geophysical Systems." Monthly Weather Review, 137(12), 40894114.
van Leeuwen, P. J. (2010). "Nonlinear data assimilation in geosciences: an extremely efficient particle filter."
Quarterly Journal of the Royal Meteorological Society, 136(653), 1991-1999.
Vossepoel, F. C., and van Leeuwen, P. J. (2007). "Parameter estimation using a particle method: Inferring mixing
coefficients from sea level observations." Monthly Weather Review, 135(3), 1006-1020.
Vrugt, J. A., Gupta, H. V., Bouten, W., and Sorooshian, S. (2003). "A Shuffled Complex Evolution Metropolis
algorithm for optimization and uncertainty assessment of hydrologic model parameters." Water
Resources Research, 39(8), -.
Vrugt, J. A., ter Braak, C. J. F., Diks, C. G. H., Robinson, B. A., Hyman, J. M., and Higdon, D. (2009a). "Accelerating
Markov Chain Monte Carlo Simulation by Differential Evolution with Self-Adaptive Randomized Subspace
Sampling." International Journal of Nonlinear Sciences and Numerical Simulation, 10(3), 273-290.
Vrugt, J. A., ter Braak, C. J. F., Gupta, H. V., and Robinson, B. A. (2009b). "Equifinality of formal (DREAM) and
informal (GLUE) Bayesian approaches in hydrologic modeling?" Stochastic Environmental Research and
Risk Assessment, 23(7), 1011-1026.
Walski, T., Chase, D. V., Savic, D. A., Grayman, W. M., Beckwith, S., and Koelle, E. (2003). Advanced Water
Distribution Modeling and Management, Haestead Methods Press, Waterbury, Connecticut.
Weerts, A. H., and el Serafy, G. (2005). "Particle Filtering and Ensemble Kalman Filtering For Input Correction in
Rainfall Runoff Modelling." International Conference on Innovation Advances And Implementation of
Flood Forecasting Technology, Tromso, Norway.
[Type text]
1054
1055
1056
1057
1058
1059
1060
1061
1062
1063
1064
1065
1066
1067
1068
1069
1070
1071
1072
1073
1074
Weerts, A. H., and El Serafy, G. Y. H. (2006). "Particle filtering and ensemble Kalman filtering for state updating
with hydrological conceptual rainfall-runoff models." Water Resources Research, 42(9).
Willems, P. (2008). "Quantification and relative comparison of different types of uncertainties in sewer water
quality modeling." Water Research, 42(13), 3539-3551.
Winkler, S., Bertrand-Krajewski, J. L., Torres, A., and Saracevic, E. (2008). "Benefits, limitations and uncertainty of
in situ spectrometry." Water Science and Technology, 57(10), 1651-1658.
Xie, X. H., and Zhang, D. X. (2010). "Data assimilation for distributed hydrological catchment modeling via
ensemble Kalman filter." Advances in Water Resources, 33(6), 678-690.
Xu, C. (2003). "Discussion of "Fuzzy approach for Analysis of Pipe Networks" by Robero Revelli and Luca Ridolfi."
American Society of Civil Engineers (ASCE), 129(7), 549-550.
Yang, J., Reichert, P., Abbaspour, K. C., and Yang, H. (2007). "Hydrological modelling of the chaohe basin in china:
Statistical model formulation and Bayesian inference." Journal of Hydrology, 340(3-4), 167-182.
Zappa, M., Jaun, S., Germann, U., Walser, A., and Fundel, F. (2011). "Superposition of three sources of
uncertainties in operational flood forecasting chains." Atmospheric Research, 100(2-3), 246-262.
Zhang, H., and Pu, Z. (2010). "Beating the uncertainties: Ensemble forecasting and ensemble based data
assimilation (review article)." Advances in Meteorology, 2010, Article ID 432160 10pp.
Zhang, J., Song, R., Bhaskar, N. R., and French, M. N. (2007). "Ensemble Forecasting of Daily Water Demand."
World Environmental and Water Resources Congress 2007: Restoring our Natural Habitat, Tampa, Florida,
U.S.A.
1075
1076
1077
1078
1079
1080
1081
1082
1083
1084
1085
1086
1087
[Type text]