Supplemental-john - California Institute of Technology
advertisement

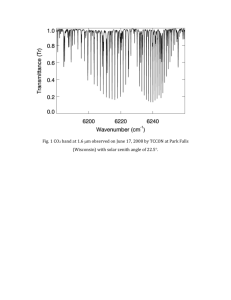
Error Characterization This is a supplement to the paper: Profiling Tropospheric CO2 using the Aura TES and TCCON instruments Le Kuai1, John Worden1, Susan Kulawik1, Kevin Bowman1, Sebastien Biraud4, Christian Frankenberg1, Debra Wunch3, Brian Connor2, Charles Miller1, Run-Lie Shia3, and Yuk Yung3 1. Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Mail stop: 233-200, Pasadena, CA 91109, USA 2. BC Consulting Ltd., 6 Fairway Dr, Alexandra 9320, New Zealand 3. California Institute of Technology, 1200 E. California Blvd., Pasadena, CA, 91125, USA 4. Lawrence Berkeley National Laboratories, Berkeley, CA, 94720, USA (A1) Errors in TCCON column-averaged CO2 In this section, we develop the error characterization for the estimates of TCCON CO2 column averages from the profile retrievals. First of all, the retrieval dimension state vector 𝜸 is obtained using the profile retrieval from TCCON spectra. 𝛾1[𝐶𝑂2 ] ⋮ 𝛾10[𝐶𝑂2] 𝛾[𝐻2 𝑂] 𝜸 = 𝛾[𝐻𝐷𝑂] 𝛾[𝐶𝐻4 ] 𝛾𝑐𝑙 𝛾𝑐𝑡 𝛾𝑓𝑠 [ 𝛾𝑧𝑜 ] (𝐴. 1) Each element of 𝜸 is a ratio between the state vector (x) and its a priori (xa) except the last four, which are instrument parameters (continuous level: ‘cl’, continuous title: ‘ct’, frequency shift: ‘fs’, and zero level offset: ‘zo’). For the target gas CO2, altitude dependent scaling factors are retrieved. For other interferential gases, a constant scaling factor for the whole profile is retrieved. To obtain a concentration 1 profile, the retrieved scaling factors is mapped from the retrieval grid (i.e. 10 levels for CO2 and 1 level for other three gases) to the 71 forward model levels. 𝜷 = 𝐌𝜸 (𝐴. 2) where 𝐌 = 𝝏𝜷 𝝏𝜸 is a linear mapping matrix relating retrieval levels to the forward model altitude grid. Multiplying the scaling factor (𝜷) on the forward model level to the concentration a priori (𝒙𝒂 ) gives the estimates of the gas profile. We define 𝐌𝒙 = 𝝏𝒙 𝝏𝜷 where 𝐌𝒙 is a diagonal matrix filled by the concentration a priori (𝒙𝒂 ): ̂ ̂ = 𝐌𝒙 𝜷 𝒙 (𝐴. 3) From Equation A.3, it follows that 𝒙𝒂 = 𝐌𝒙 𝜷𝒂 and 𝒙 = 𝐌𝒙 𝜷. The Jacobian matrix of retrieved parameter with respect to the radiance is 𝐊𝛄 = 𝜕𝑳(𝐌𝜸) 𝜕𝜸 (𝐴. 4) Using the chain rule, we can obtain the equation relating the retrieval Jacobians to the full-state Jacobian 𝝏𝑳 𝝏𝑳 𝝏𝒙 𝝏𝜷 = 𝝏𝜸 𝝏𝒙 𝝏𝜷 𝝏𝜸 (𝐴. 5) 𝐊 𝜸 = 𝐊 𝒙 𝐌𝒙 𝐌 = 𝐊 𝜷 𝐌 (𝐴. 6) or If the estimate is “close” to the true state, then the estimated state for a single measurement can be expressed as a linear retrieval equation [e.g., Rodgers 2000]: 2 ̂ = 𝜷𝒂 + 𝐀 𝜷 (𝜷 − 𝜷𝒂 ) + 𝐌𝐆𝜸 𝒏 + ∑ 𝐌𝐆𝜸 𝐊 𝒍𝒃 ∆𝒃𝒍 𝜷 (𝐴. 7) 𝒍 where n is a zero-mean noise vector with covariance 𝐒𝐞 and the vector ∆𝒃𝒍 is the error in true state of parameters (l) that also affect the modeled radiance, e.g. temperature, interfering gases, and etc. 𝐊 𝒍𝒃 is the Jacobian of parameter (l). 𝐆𝜸 is the gain matrix, which is defined by 𝐆𝜸 = 𝝏𝜸 = (𝐊 𝐓𝜸 𝐒𝐞−𝟏 𝐊 𝜸 + 𝐒𝐚−𝟏 )−𝟏 𝐊 𝐓𝜸 𝐒𝐞−𝟏 𝝏𝑳 (𝐴. 8) ̂), we apply Eq. If we want to convert Eq. (A. 7) to the state vector of concentration (𝒙 (A. 3): ̂ = 𝒙𝒂 + 𝐌𝒙 𝐀 𝜷 𝐌𝒙−𝟏 (𝒙 − 𝒙𝒂 ) + 𝐌𝒙 𝐌𝐆𝜸 𝒏 + ∑ 𝐌𝒙 𝐌𝐆𝜸 𝐊 𝒍𝒃 ∆𝒃𝒍 𝒙 (𝐴. 9) 𝒍 The averaging kernel for 𝜷 in forward model dimension is 𝐀 𝜷 = 𝐌𝐆𝜸 𝐊 𝜷 (𝐴. 10) We can define 𝐀 𝑥 = 𝐌𝒙 𝐀 𝜷 𝐌𝒙−𝟏 as the averaging kernel for 𝒙. If we have N TCCON observations within a short time window (i.e. 4-hr time window), they could be considered as multiple measurements of the same air mass. Their mean is: 𝑁 1 ̂𝑁 = ∑ 𝒙 ̂𝒊 𝒙 𝑁 (𝐴. 11) 𝑖=1 3 ̂𝒊 with Eq. (A. 9) results in: Replacing 𝒙 𝑁 𝑁 𝑖=1 𝑖=1 1 1 ̂𝑁 = 𝒙𝒂 + ∑ 𝐀 𝒙𝑖 (𝒙 − 𝒙𝒂 ) + ∑ 𝐌𝒙 𝐌𝐆𝜸𝑖 𝒏𝑖 + 𝒙 𝑁 𝑁 𝑁 1 ∑ ∑ 𝐌𝒙 𝐌𝐆𝜸i 𝐊 𝒍𝒃𝒊 𝚫𝒃𝒍𝒊 𝑁 𝑖=1 (𝐴. 12) 𝑙 where the first term represents the a priori profile which stays the same within the same day but is variable day by day. Assuming that 𝐀 𝒙𝑖 , 𝐆𝜸𝑖 and 𝐊 𝒍𝒃𝒊 do not vary over this time window results in: 𝑁 1 ̅ 𝑁 , 𝐆𝜸𝑖 = 𝐆, 𝐊 𝒍𝒃𝒊 = 𝐊 𝒍𝒃 ∑ 𝐀 𝒙𝑖 = 𝐀 𝑁 (𝐴. 13) 𝑖=1 The estimated bias error for multiple measurements of the same air parcel would be the residual between the mean of retrieval estimates and the truth. Following Eq.s (A.9) and (A.11), the estimated bias error when observing the same air mass is: 𝑁 1 ̅ 𝑵 )(𝒙𝒂 − 𝒙) + ∑ 𝐌𝒙 𝐌𝐆𝜸𝑖 𝒏𝑖 + ̃𝑵 = 𝒙 ̂𝑁 − 𝑥 = (𝐈 − 𝐀 𝒙 𝑁 𝑖=1 𝑁 1 ∑ ∑ 𝐌𝒙 𝐌𝐆𝜸i 𝐊 𝒍𝒃𝒊 𝚫𝒃𝒍𝒊 𝑁 𝑖=1 (𝐴. 14) 𝑙 The bias within a day will primarily be due to biases in temperature and spectroscopy. We assume 𝒏𝑖 and 𝚫𝒃𝒍𝒊 are independent, normally distributed random variables for all N observations. We further assume 𝒏𝑖 is zero-mean while 𝚫𝒃𝒍𝒊 is non-zero-mean ̅̅̅̅̅𝒍 ). Applying the averaging kernel and constraint vector to the aircraft profile (𝚫𝒃 4 removes the first term that is dependent on the Averaging kernel. The expected mean bias error for the observations of the same air mass then becomes: ̃𝑵 ) = ∑ 𝐌𝒙 𝐌𝐆𝜸i 𝐊 𝒍𝒃 ̅̅̅̅̅ 𝑬(𝒙 𝚫𝒃𝒍 (𝐴. 15) 𝑙 Systematic errors due to temperature, water, and spectroscopy have non-zero expected values ̅̅̅̅̅ ∆𝒃𝒍 for the same air parcel. However, for multiple air parcels we would expect that the temperature and water uncertainty will vary but that the error due to spectroscopy will not. The covariance describing the temperature and 𝑻 water errors have the form of: 𝑬(∆𝒃𝒍 − ̅̅̅̅̅ ∆𝒃𝒍 )(∆𝒃𝒍 − ̅̅̅̅̅ ∆𝒃𝒍 ) = 𝐒𝒃𝒍 . ; these affect the CO2 uncertainty in the following manner: 𝑻 ̃𝑵 − 𝑬(𝒙 ̃𝑵 ))(𝒙 ̃𝑵 − 𝑬(𝒙 ̃𝑵 )) ] = 𝐒𝒙̃ = 𝑬 [(𝒙 𝑁 1 ∑ ∑ 𝐌𝒙 𝐌𝐆𝜸i 𝐊 𝒍𝒃𝒊 𝐒𝒃 (𝐌𝒙 𝐌𝐆𝜸i 𝐊 𝒍𝒃𝒊 )𝑻 2 𝑁 𝑖=1 (𝐴. 16) 𝑙 The spectral noise and systematic errors are assumed to be uncorrelated. Under the condition of Eq. (A. 13), then covariance of the estimated bias error reduces to 𝐒𝒙̃ = 1 1 𝐌𝒙 𝐌𝐆𝜸 𝐒𝐞 (𝐌𝒙 𝐌𝐆𝜸 )𝑻 + ∑ 𝐌𝒙 𝐌𝐆𝜸 𝐊 𝒍𝒃 𝐒𝒃 (𝐌𝒙 𝐌𝐆𝜸 𝐊 𝒍𝒃 )𝑻 𝑁 𝑁 (𝐴. 17) 𝑙 The sample covariance is 𝐒̂ = 𝑻 1 ̅ ̅ ̂−𝐗 ̂)(𝐗 ̂−𝐗 ̂) (𝐗 𝑁−1 (𝐴. 18) 5 ̂ is a matrix whose columns are the retrieved TCCON profiles and whose where 𝐗 ̅ ̂ is a matrix whose columns are the rows are N observations of the same air mass. 𝑿 profiles of the mean values of retrieval samples. The sample covariance can be rewritten as 𝐒̂ = 𝑁 𝐓 [𝐌𝒙 𝐌𝐆𝐒𝐞 (𝐌𝒙 𝐌𝐆)𝐓 + ∑ 𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 𝐒𝒃𝒍 (𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 ) ] 𝑁−1 (𝐴. 19) 𝑙 For a large number N, the actual variability of retrievals can be represented by the sum of two covariance matrices: 𝐒̂ ≈ 𝐒̂𝐦 + 𝐒̂𝐬𝐲𝐬 (𝐴. 20) where the measurement error covariance is 𝐒̂𝐦 = 𝐌𝒙 𝐌𝐆𝐒𝐞 (𝐌𝒙 𝐌𝐆)𝐓 (𝐴. 21) and the “systematic” error covariance is 𝐓 𝐒̂𝐬𝐲𝐬 = ∑ 𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 𝐒𝒃𝒍 (𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 ) (𝐴. 22) 𝒍 To examine how well the estimated systematic and random covariance matrices represent the actual variability in the retrievals, we can compare the sample covariance to the actually variability of the retrieved samples. Applying a columnaveraging operator, such as a pressure weighting function h (Connor et al., 2008) to the sample covariance, its square root can be compared to the root-mean-square of the collection of the multiple retrievals within 4-hr time window: 6 𝑆̂𝐂 ≈ 𝒉𝑻 𝐒̂𝐦 𝒉 + 𝒉𝑻 𝐒̂𝐬𝐲𝐬 𝒉 (𝐴. 23) The variability of the systematic errors when observing the same air mass are small, so the second term is less important for the variability of the bias error in 4-hr time window. Considering the observations of over multiple days, which mean the air mass has been changed, the systematic errors can be assumed to be zero-mean random variables instead. For example, the mean bias error over J different days is the average of the bias errors for each air parcel: 𝐽 ̃𝑁𝐽 𝒙 1 ̃𝑁𝑗 = ∑𝒙 𝐽 (𝐴. 24) 𝑗=1 and it can be estimated by ̃𝑁𝐽 𝒙 𝐽 𝑱 𝑵𝒋 𝑗=1 𝑗=1 𝑖=1 1 1 1 ̅ 𝑵 )(𝒙𝒂𝒋 − 𝒙𝒋 ) + ∑( ∑ 𝐌𝒙 𝐌𝐆𝒊𝒋 𝒏𝒊𝒋 ) = ∑(𝐈 − 𝐀 𝐽 𝐽 𝑁𝑗 𝐽 𝑁𝑗 1 1 + ∑( ∑ ∑ 𝐌𝒙 𝐌𝐆𝒊𝒋 𝐊 𝑙𝒃𝒊𝒋 ∆𝒃𝑙𝑖𝑗 ) 𝐽 𝑁𝑗 𝑗=1 𝑖=1 (𝐴. 25) 𝑙 where 𝒏𝑖𝑗 is still a zero mean random measurement noise and ∆𝒃𝑙𝑖𝑗 become a zero mean variable. So the systematic error contributions (e.g., from temperature) to the mean bias estimate can be averaged . However, its covariance becomes a significant source to the variability of bias. The expected mean bias reduces to 𝐽 1 ̅ 𝑁 )(𝒙𝒂𝒋 − 𝒙𝒋 ) ̃𝑁𝐽 ] = ∑(𝐈 − 𝐀 𝑬[𝒙 𝐽 (𝐴. 26) 𝑗=1 The covariance of the estimated bias error can be expressed as 7 𝑇 ̃𝑁𝐽 − 𝑬[𝒙 ̃𝑁𝐽 ])(𝒙 ̃𝑁𝐽 − 𝑬[𝒙 ̃𝑁𝐽 ]) ] 𝐒𝒙̃ = 𝑬 [(𝒙 𝐽 1 1 = 2 ∑ 𝐌𝒙 𝐌𝐆𝒋 𝐒𝐞 (𝐌𝒙 𝐌𝐆𝒋 )𝑇 𝐽 𝑁𝑗 𝑗=1 𝐽 1 1 + 2 ∑ ∑ 𝐌𝒙 𝐌𝐆𝒋 𝐊 𝑙𝒃𝒋 𝐒𝒃𝐥 (𝐌𝒙 𝐌𝐆𝒋 𝐊 𝑙𝒃𝒋 )T 𝐽 𝑁𝑗 (𝐴. 27) 𝑗=1 𝑙 where the spectral noise and systematic errors are assumed to be uncorrelated. J is the number of different air parcels being measured and 𝑁𝑗 represents the number of multiple retrievals for the same air mass j. The first term describes the variability of bias error driven by measurement noise and the second term represents the source from systematic errors. The sample covariance becomes: 𝐒̂ = 1 ̂ 𝑵 − 𝐗 𝑱 )(𝐗 ̂ 𝑵 − 𝐗 𝑱 )𝑻 (𝐗 𝐽−1 (𝐴. 28) ̂ 𝑵 is a matrix whose columns are the profiles of the mean values of the where 𝐗 multiple retrievals for the same air mass and whose rows are measurements for 𝐽 air parcels. 𝐗 𝑱 is a matrix whose columns are the true profiles or the aircraft observed profiles for 𝐽 air parcels. Assuming that the variability of 𝐆𝜸 and 𝐊 𝒃 are small, then: 𝐒̂ = 𝐽 𝐓 [𝐌𝒙 𝐌𝐆𝐒𝐞 (𝐌𝒙 𝐌𝐆)𝐓 + ∑ 𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 𝐒𝒃𝒍 (𝐌𝒙 𝐌𝐆𝐊 𝒍𝒃 ) ] 𝐽−1 𝑙 ≈ 𝐒̂𝐦 + 𝐒̂𝐬𝐲𝐬 (𝐴. 29) 8 Applying the column-averaging operator, it should be consistent with the actual variability of bias error in retrieved column averages. The second term by the systematic errors becomes dominant. To estimate the actual bias, we need compare TCCON estimates to the aircraft measurements, which are considered as the best estimates of true state (𝒙). The aircraft profile is first mapped to the forward model pressure level in TCCON retrieval and then apply the smoothing operator described in Rodgers and Connor (2003) to be smoothed by the averaging kernel and a priori constraint from the TCCON profile retrieval: ̂𝑭𝑳𝑻 = 𝒙𝒂 + 𝐀 𝒙 (𝒙𝑭𝑳𝑻 − 𝒙𝒂 ) 𝒙 (𝐴. 30) ̂𝑭𝑳𝑻 is the profile that would be retrieved from TCCON measurements for the same 𝒙 air sampled by the aircraft without the presence of other errors. Applying the ̂𝑭𝑳𝑻 gives estimates of the aircraft column averages. column-averaging operator to 𝒙 We can examine how well the estimated random and systematic covariance matrices represent the actual variability of N TCCON retrievals by comparing the calculated errors to the empirical errors from real retrievals. 9 (A2) Errors in PBL column-averaged CO2 To make PBL CO2 useful for carbon cycle science we have to understand the potential source of bias in the PBL CO2 product. Averaging kernel matrix can be decomposed into four sub-matrices to represent the boundary layer, free troposphere and their correlations: 𝐀=[ 𝐀𝐁 𝐀 𝐅𝐁 𝐀 𝐁𝐅 ] 𝐀𝐅 (𝐴. 31) where subscript ‘B’ represents the boundary layer, ‘F’ represents the free troposphere. The intercomparison equation in the form of (A. 30) could be rewritten as ̂𝑩 𝒙 𝒙𝑩 𝐀 [ 𝑭] = [ 𝑭] + [ 𝐁 𝐀 𝐅𝐁 ̂ 𝒙 𝒙 𝐀 𝐁𝐅 𝒙𝑩 − 𝒙𝑩 𝒂 ][ 𝑭 ] 𝐀 𝐅 𝒙 − 𝒙𝑭𝒂 (𝐴. 32) 𝑩 𝑩 𝑭 𝑭 ̂𝑩 𝒙 𝒙𝑩 𝒂 + 𝐀 𝐁 (𝒙 − 𝒙𝒂 ) + 𝐀 𝐁𝐅 (𝒙 − 𝒙𝒂 ) [ 𝑭] = [ 𝑭 ] (𝐴. 33) 𝑭 𝑭 ̂ 𝒙 𝒙𝒂 + 𝐀 𝐅𝐁 (𝒙𝑩 − 𝒙𝑩 𝒂 ) + 𝐀 𝐅 (𝒙 − 𝒙𝒂 ) From (A. 33) the boundary layer aircraft profile and free troposphere TES profile applied with TCCON averaging kernel are expressed as 𝑩 𝑭 𝑩 𝑩 𝑭 ̂𝑩 𝒙 𝑭𝑳𝑻 = 𝒙𝒂 + 𝐀 𝐁 (𝒙𝑭𝑳𝑻 − 𝒙𝒂 ) + 𝐀 𝐁𝐅 (𝒙𝑭𝑳𝑻 − 𝒙𝒂 ) (A. 34) 𝑭 𝑩 𝑭 ̂𝑭𝑻𝑬𝑺 = 𝒙𝑭𝒂 + 𝐀 𝐅𝐁 (𝒙𝑩 𝒙 𝑻𝑬𝑺 − 𝒙𝒂 ) + 𝐀 𝐅 (𝒙𝑻𝑬𝑺 − 𝒙𝒂 ) (𝐴. 35) We simplify the TCCON estimated profile in terms of linear term plus random noise error and systematic error ̂𝑻𝑪𝑪𝑶𝑵 = 𝒙𝒂 + 𝐀(𝒙 − 𝒙𝒂 ) + 𝐆𝒏 + 𝐆𝐊 𝒃 ∆𝒃 𝒙 (𝐴. 36) 10 Applying column-integral operator (𝑪) by Eq. (1), it will give the estimates of total column amount. 𝑑𝑟𝑦 𝑪𝒇𝑔 ∞ 𝑑𝑟𝑦 = ∫ 𝒇𝑔 (𝒛) ∙ 𝝆(𝒛) ∙ 𝑑𝑧 (27) 𝑧𝑠 The superscript F of the column-integral operator means the integration within free troposphere, and B means the integration within the boundary layer. Without superscript suggests the integration from the bottom to the top. The total column amount can be decomposed to the components of the boundary layer, free troposphere, and the cross terms. 𝑇𝑂𝑇 𝐶𝑇𝐶𝐶𝑂𝑁 = 𝑪𝒙𝒂 + 𝑪𝐀(𝒙 − 𝒙𝒂 ) + 𝑪𝐆𝒏 + 𝑪𝐆𝐊 𝒃 ∆𝒃 𝑭 𝑭 𝑩 𝑩 𝑩 𝑩 𝑭 𝑭 = 𝑪𝑩 𝒙𝑩 𝒂 + 𝑪 𝒙𝒂 + 𝑪 [𝐀 𝐁 (𝒙 − 𝒙𝒂 )] + 𝑪 𝐀 𝐁𝐅 (𝒙 − 𝒙𝒂 ) 𝑭 𝑭 𝑭 +𝑪𝑭 𝐀 𝐅𝐁 (𝒙𝑩 − 𝒙𝑩 𝒂 ) + 𝑪 𝐀 𝐅 (𝒙 − 𝒙𝒂 ) + 𝑪𝐆𝒏 +𝑪𝐆𝐊 𝒃 ∆𝒃 (𝐴. 37) Similarly, for the free tropospheric partial column amount, apply the columnintegral operator within free troposphere to TES profile in Eq. (A.35): 𝑭 𝐹 𝑩 𝑭 𝑭 𝐶𝑇𝐸𝑆 = 𝑪𝑭 𝒙𝑭𝑻𝑬𝑺 = 𝑪𝑭 𝒙𝑭𝒂 + 𝑪𝑭 𝐀 𝐅𝐁 (𝒙𝑩 𝑻𝑬𝑺 − 𝒙𝒂 ) + 𝑪 𝐀 𝐅 (𝒙𝑻𝑬𝑺 − 𝒙𝒂 ) (𝐴. 38) The PBL column amount is the difference of Eq. (A.37) and (A.38): 𝐵 𝑇𝑂𝑇 𝐹 𝐶𝑇𝐶𝐶𝑂𝑁+𝑇𝐸𝑆 = 𝐶𝑇𝐶𝐶𝑂𝑁 − 𝐶𝑇𝐸𝑆 𝑩 𝑩 𝑩 𝑩 𝑩 𝑭 𝑭 𝑭 𝑩 = 𝑪𝑩 𝒙 𝑩 𝒂 + 𝑪 [𝐀 𝐁 (𝒙 − 𝒙𝒂 )] + 𝑪 𝐀 𝐁𝐅 (𝒙 − 𝒙𝒂 ) + 𝑪 𝐀 𝐅𝐁 (𝒙 − 𝒙𝑻𝑬𝑺 ) +𝑪𝑭 𝐀 𝐅 (𝒙𝑭 − 𝒙𝑭𝑻𝑬𝑺 ) + 𝑪𝐆𝒏 + 𝑪𝐆𝐊 𝒃 ∆𝒃 (𝐴. 39) 11 Applying column-integral operator within boundary layer to Eq. (A.34) gives the PBL amount by aircraft measurements. 𝑩 𝑭 𝐵 𝑩 𝑩 𝑩 𝑭 𝐶𝐹𝐿𝑇 = 𝑪𝑩 𝒙 𝑩 𝒂 + 𝑪 𝐀 𝐁 (𝒙𝑭𝑳𝑻 − 𝒙𝒂 ) + 𝑪 𝐀 𝐁𝐅 (𝒙𝑭𝑳𝑻 − 𝒙𝒂 ) (𝐴. 40) The bias error of PBL column amount can be estimated by the difference of Eq. (A.39) to Eq. (A.40). 𝐵 𝑭 𝐵 𝑩 𝑭 𝐶̃ 𝐵 = 𝐶𝑇𝐶𝐶𝑂𝑁+𝑇𝐸𝑆 − 𝐶𝐹𝐿𝑇 = 𝑪𝑩 𝐀 𝐁 (𝒙𝑩 − 𝒙𝑩 𝑭𝑳𝑻 ) + 𝑪 𝐀 𝐁𝐅 (𝒙 − 𝒙𝑭𝑳𝑻 ) 𝑭 𝑭 𝑭 +𝑪𝑭 𝐀 𝐅𝐁 (𝒙𝑩 − 𝒙𝑩 𝑻𝑬𝑺 ) + 𝑪 𝐀 𝐅 (𝒙 − 𝒙𝑻𝑬𝑺 ) + 𝑪𝐆𝒏 + 𝑪𝐆𝐊 𝒃 ∆𝒃 (𝐴. 39) If the cross sub-matrix of averaging kernel are nearly a null matrix and the errors in flight measurements are negligible, then the bias error in PBL column amount can be simplified as: 𝐶̃ 𝐵 = 𝑪𝑭 𝐀 𝐅 (𝒙𝑭 − 𝒙𝑭𝑻𝑬𝑺 ) + 𝑪𝐆𝒏 + 𝑪𝐆𝐊 𝒃 ∆𝒃 (𝐴. 40) Then the bias in PBL column averages is 𝑃𝐵𝐿 𝑋̃𝐶𝑂 = 2 𝑪𝑭 𝐀 𝐅 (𝒙𝑭 − 𝒙𝑭𝑻𝑬𝑺 ) + 𝑪𝐆𝒏 + 𝑪𝐆𝐊 𝒃 ∆𝒃 𝑪𝑩 𝑨𝑰𝑹 (𝐴. 41) where 𝑪𝑩 𝑨𝑰𝑹 is the column amount of air within the boundary layer. The first term on the right represents the source of bias from TES free tropospheric CO2 and last two terms are the bias from TCCON column estimate. 12 (A3) Estimating the free tropospheric CO2 column using TES and GEOS-Chem To estimate the free tropospheric CO2, retrieved TES CO2 fields are assimilated into the GEOS-Chem model. GEOS-Chem is a global 3-D chemical transport model (CTM) for atmospheric composition developed by NASA Goddard, with sources and additional modifications specific to the carbon cycle as described in Nassar et al. (2010) and Kulawik et al. (2011). TES at all pressure levels between 40S and 40N, along with the predicted sensitivity and errors, was assimilated for the year 2009 using 3d-var assimilation. We compare model output with and without assimilation to surface based in situ aircraft measurements from the U.S. DOE Atmospheric Radiation Measurement (ARM) Southern Great Plains site during the ARM-ACME (www.arm.gov/campaigns/aaf2008acme) and HIPPO-2 (hippo.ucar.edu/) mission. We find improvement in the seasonal cycle amplitude in the mid-troposphere at the SGP site, but also discrepancies with HIPPO at remote oceanic sites, particularly outside of the latitude range of assimilation (Kulawik et al., manuscript in preparation). References: Nassar, R., D. B. A. Jones, et al. (2010). "Modeling global atmospheric CO2 with improved emission inventories and CO2 production from the oxidation of other carbon species." Geoscientific Model Development 3(2): 689-716. Kulawik, S.S., K.W. Bowman, M. Lee, R. Nassar, D.B.A. Jones, S.C. Biraud, S. Wofsy, D. Wunch, W. Gregg, J. R. Worden, C. Frankenberg, “Constraints on near surface and 13 free Troposphere CO2 concentrations using TES and ACOS-GOSAT CO2 data and the GEOS-Chem model”, AGU presentation, 2011. Kulawik, S.S., J.R. Worden, S. Wofsy, S.C. Biraud, R. Nassar, D.B.A. Jones, E. T. Olsen, G. B. Osterman, “Comparison of improved Aura Tropospheric Emission Spectrometer (TES) CO2 with HIPPO and SGP aircraft profile measurements”, accepted by Atmos. Chem. Phys., 2012. 14