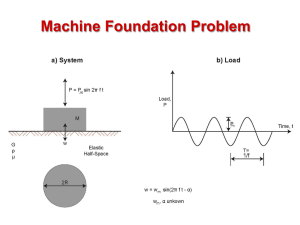
simplified methods in soil dynamics ricardo dobry
advertisement

Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 1 MÉTODOS SIMPLIFICADOS EN LA DINÁMICA DE SUELOS RICARDO DOBRY Profesor Institucional, Instituto Politécnico de Rensselaer, Troy, Nueva York, E.U.A. RESUMEN Después de una breve descripción de las características principales que definen la Dinámica de Suelos y sus aplicaciones a la ingeniería, se discute la importancia de los Métodos Simplificados. Aún con la actual disponibilidad de poderosas simulaciones por computadora, los Métodos Simplificados continuarán desempeñando un papel importante en la Dinámica de Suelos así como lo han hecho en el resto de la Ingeniería Geotécnica. Los Métodos Simplificados permiten al ingeniero realizar cálculos manuales o con un mínimo de apoyo computacional, facilitando así los estudios paramétricos. En el proceso, el ingeniero tiene la posibilidad de desarrollar una sensibilidad sobre el significado físico y la importancia relativa de los factores involucrados, adquiriendo un mayor control sobre los cálculos y las decisiones, incluyendo el uso de su criterio como ingeniero basado en su experiencia personal. Se presenta una lista de procedimientos simplificados desarrollados por el autor, considerando sistemas que varían desde el campo libre y las presas de tierra, hasta cimentaciones superficiales y profundas sujetas tanto a excitaciones causadas por movimientos sísmicos, como por vibraciones de maquinaria. Un conocimiento básico de la teoría fundamental y de las idealizaciones detrás de los procedimientos simplificados pueden ser muy útiles a los ingenieros, incluyendo especialmente conceptos de la Dinámica y de la Propagación de Ondas. Parte de este conocimiento se presenta en el documento, con aplicación a las cimentaciones superficiales para maquinaria y a la interacción dinámica suelo-estructura. La Conferencia se centra en las cimentaciones superficiales para maquinaria sobre un semiespacio sujetas a cargas dinámicas en cualquiera de los seis grados de libertad, y los Métodos Simplificados que se han desarrollado a través del tiempo para caracterizar a los correspondientes resortes y amortiguadores equivalentes del suelo. Esto incluye el caso general en que estos resortes y amortiguadores dependen de la frecuencia de excitación, así como la simplificación lograda en algunos casos en que estos resortes y amortiguadores se consideran independientes de la frecuencia. Inicia con el caso de la cimentación superficial circular que fue estudiada durante gran parte del siglo XX, hasta las contribuciones seminales desarrolladas por Lysmer y otros autores entre 1966 y 1971, y continua con los casos de cimentaciones superficiales y enterradas con geometría de base arbitraria, concluyendo con las dos publicaciones sintetizadas escritas por Gazetas en 1990 y 1991. El desarrollo de estos métodos simplificados con resortes y amortiguadores equivalentes para cimentaciones superficiales y enterradas de forma arbitraria se presenta en detalle, incluyendo las contribuciones del autor al inicio de este proceso. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 2 SIMPLIFIED METHODS IN SOIL DYNAMICS RICARDO DOBRY Institute Professor, Rensselaer Polytechnic Institute, Troy, New York, U.S.A. ABSTRACT After a brief description of the main characteristics that define Soil Dynamics and its engineering applications, the role of Simplified Methods is discussed. Despite the current wide availability of powerful computer simulations, it is concluded that Simplified Methods will continue to play an important role in Soil Dynamics as they do in the rest of Geotechnical Engineering. Simplified Methods allow the engineer to conduct calculations by hand or with a minimum computational effort, including parametric variations. In the process, the engineer has the possibility to develop a feel for the physical meaning and relative importance of the various factors, with more personal control of calculations and decisions including use of engineering judgment as needed. A list of simplified procedures proposed by the author is provided, covering systems that range from the free field and earth dams to shallow and deep foundations, subjected to excitations that include both seismic shaking and machine vibrations. Basic understanding of the basic theory and simplifications behind the simplified procedure can be very helpful to engineers, including Dynamics and Wave Propagation concepts. Some of this understanding is developed in the paper, with focus on shallow machine foundations and other dynamic soil-structure interaction applications. The Lecture concentrates on shallow machine foundations on a half-space subjected to dynamic loads in any of the six degrees of freedom of the foundation, and the Simplified Methods that have been proposed over the years to characterize the corresponding equivalent soil springs and dashpots. This includes both frequency-dependent and frequency-independent springs and dashpots. It started with the circular surface foundation which was studied over much of the 20th Century, until the breakthroughs by Lysmer and others in 1966-1971, and continued with the cases of surface and embedded foundations of arbitrary shape that culminated in the two summary publications by Gazetas in 1990 and 1991. The development of these simplified equivalent springs and dashpots for both surface and embedded foundations of arbitrary shape is discussed in some detail, including the contribution of the author in the early part of the process. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry 1. XXI Nabor Carrillo Lecture 3 INTRODUCTION It is a great honor for me to be asked to present the Twenty-first Nabor Carrillo Lecture, and to be associated this way with Dr. Nabor Carrillo and his many accomplishments. It is also an honor to be associated with the people who have been Carrillo Lecturers over the years and who have made such gigantic contributions to the geotechnical field. Let me add that I am especially proud to follow two Carrillo Lecturers who were also my professors and who had an extraordinary influence over my career. One of them is Prof. Enrique Tamez (1992), who directed my Master Thesis on Sand Liquefaction During Earthquakes at the UNAM in México City many years ago, and who inspired me to specialize in Soil Dynamics and Earthquake Engineering. The other is Prof. Robert V. Whitman (2000), who unfortunately died this year, and who directed my Doctoral Thesis at MIT, also on Soil Dynamics. I wouldn’t be here without them, both of them were great teachers and mentors to me, and this is a good opportunity to say Thanks to both of them. Finally, let me say that it is just a pleasure to be once again back in México, where I have so many friends and colleagues. One of them is Prof. Eulalio Juárez Badillo, who together with Prof. Alfonso Rico taught me so well the ABC of soil mechanics during my graduate studies at the División de Posgrado of UNAM. The theme of my presentation today is the Simplified Methods in Soil Dynamics. This immediately poses two questions: What is Soil Dynamics, and what kind of Simplified Methods are we talking about? In his Fifteenth Carrillo Lecture, Prof. Whitman (2000) defined problems in soil dynamics as those in which the inertia force of the soil plays a significant role. I would add to this a few other characteristics common to most soil dynamics problems: (i) the loads tend to act much faster than in typical soil mechanics problems; (ii) the loads change direction periodically because they are associated with vibrations, and therefore produce cyclic rather than monotonic stresses and strains in the soil; and finally (iii) many of the problems that worry us most in soil dynamics, are associated with shear strains in the soil which are much smaller than those we are familiar with in regular soils testing, like 0.1%, or 0.01% or even smaller. Table 1, reproduced from that same Carrillo Lecture by Whitman, lists some of the most important practical applications of Soil Dynamics. It includes the problems of machine foundations, earthquake engineering, pile driving, techniques used to compact sands in the field, problems of ocean wave loading of offshore structures, etc. Let me say a couple of things, first about earthquakes and then about machine foundations, so as to give a better idea of some of the complexities of analyzing Soil Dynamics systems and the need for simplified solutions. Figure 1 shows the amplification of the earthquake waves by the soft clay in Mexico City in the 1985 earthquake, which caused a lot of damage to buildings and killed thousands of people, and which has been studied in detail by a number of Mexican engineers. The curves in the figure are acceleration response spectra, and they measure the maximum lateral force experienced by a building that behaves elastically during the earthquake in number of accelerations of gravity, or g’s, versus the period of the building in seconds. In 1985 essentially all collapsed buildings and fatalities were on soil and not on rock. This happened because the SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 4 earthquake inertia forces on these assumed elastic buildings due to the shaking, were much greater on soil than on rock, as much as ten times higher, as can seen in the figure by how much bigger is the recorded acceleration spectrum on soil at the building of the Secretaría de Comunicaciones y Transportes (SCT), compared with the same recorded spectrum on rock at the University (UNAM) (Seed, 1987; Romo and Seed, 1987; Dobry, 1991a). Table 1. Applications of Soil Dynamics (Whitman, 2000). Figure 1. Earthquake amplification on the Mexico City soft clay in 1985 (Romo and Seed, 1987; Seed, 1987; Dobry, 1991a). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 5 The way we analyze the earthquake amplification by the soil in a situation like this, is by feeding into a computer program the motions on the rock, together with a dynamic profile of the soil which must include for each layer properties like the density of the soil, the shear wave velocity Vs, and the internal damping. Then the computer program will calculate the motion on top of the soil. This computer program is relatively complex, becoming even more so if you include 2D and 3D effects due to the presence of hills nearby, or the effect of inclined or irregular soil layers. The shear wave velocity of the Mexico City clay is quite low, of the order of 70 or 80 m/s, and this low shear wave velocity played a significant role in the large site amplification during the 1985 earthquake. Shear wave velocity is by far the most important soil property needed for these earthquake calculations. The shear wave velocities for most soils in the world range from about 60 to 800 m/s; a factor of about fifteen. It turns out that to know with some precision the value of this parameter for your particular problem is also key to the analysis of most Soil Dynamics problems, not only earthquake soil amplification. In fact, shear wave velocity is clearly the single most important soil parameter in the whole of Soil Dynamics, as important as soil shear strength is for slope stability calculations. Figure 2 illustrates another important category of soil dynamics problems: machine foundations, where a structure on a shallow or deep foundation is excited by dynamic loads above ground, typically due to unbalanced inertia forces caused by operation of industrial machinery. The loads can be complicated, ranging from sinusoidal forces having one amplitude, direction and frequency, to very irregular loads and moments, and combinations of vertical, horizontal, rocking and torsional vibrations. Other parameters that add complication to the solution include the type, geometry, mass, degree of embedment, and flexibility of the foundation; and the soil layering and soil properties of each layer including most prominently the shear wave velocity. Figure 2. Machine foundation vibrations and dynamic soil-structure interaction. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 6 This machine foundation problem is mathematically very similar to other problems that involve dynamic soil-structure interaction. For example, the dynamic forces and moments acting on the pile group in Fig. 2f could originate from ocean waves pushing periodically against the side of an offshore oil platform. These dynamic forces and moments may also arise from the inertia forces developed in a building during earthquake shaking, due to the arrival of the seismic waves traveling in the ground, sketched in Fig. 2g in a very simplified way. Due to this mathematical similarity, we often use the solutions developed for machine foundations, to analyze also the dynamic soil-structure interaction during earthquakes. To a large extent, the differences between the solutions for these different forms of dynamic soil-structure interaction (machine foundations, ocean wave loading, earthquakes), lie not so much in the physical origin of the loading, but rather in its duration and frequency as well as in the level of cyclic strains induced in the soil. 2. THE NEED FOR SIMPLIFIED METHODS Let me address the issue of the Simplified Procedures. For the purpose of this presentation, I will define a Simplified Procedure as a method that: (i) is derived totally or partially from basic theory; and (ii) can be used to analyze a geotechnical system either with a calculator or with minimum computational effort, of the type than can be programmed in a spreadsheet. We constantly use Simplified Methods in Geotechnical Engineering for the analysis and design of static loads. Figure 3 shows three of them, all very familiar to geotechnical engineers. In fact, I obtained the information for this figure from two standard foundation engineering textbooks. Figure 3. Examples of Simplified Methods in Soil Mechanics (modified after Liu and Evett, 1998; Das, 1999). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 7 Let us take a look at these three methods. The ultimate bearing capacity equation in Fig. 3a is based on an approximate Theory of Plasticity solution developed by Prandtl (1920) and Reissner (1924), that Terzaghi (1943) simplified further, producing the equation at the bottom. The material parameters required are the soil cohesion and friction angle, which are obtained from laboratory tests, or, in the case of sands, the friction angle ϕ may be estimated from field penetration tests. The Schmertmann and Hartman (1978) method in Fig. 3b, which is used to compute foundation settlement in sand, depends on a triangular stress distribution with depth that is a simplification of the theoretical profile of stress with depth obtained from the Theory of Elasticity Boussinesq solution. In this settlement calculation the key material parameter is the modulus, Ez, of each sand layer. And, finally, the popular ordinary method of slices with an assumed circular failure surface, proposed by Fellenius (1936), sketched in Fig. 3c, just uses basic equations of static equilibrium together with some simplifying assumptions, allowing definition of the Factor of Safety of the slope when the shear strength of the soil varies along the failure surface. Therefore, the three methods start from some basic and very general theory, and they add simplifications and assumptions along the way until they arrive to a simple mathematical model that still contains the main parameters of interest and is broad enough to accommodate the values of these parameters for many possible systems. Furthermore, the application of any of these Simplified Methods requires material parameters like c, ϕ or Ez that are either measured in the lab or field, or are correlated empirically to field tests like the CPT or the SPT. These Simplified Methods have two main characteristics, which are common to static and dynamic loads: (i) they start with basic theory and they simplify that theory while keeping the relevant factors; and (ii) they still cover a broad range of possible conditions, allowing the engineer to bring into the analysis his/her own loads, foundation or soil geometries, soil profiles and soil properties. These simplified methods have a number of uses, including: They allow the engineer to conduct calculations, either by hand or using a minimum computational effort (hand calculator, spreadsheet). They allow the engineer to develop a feel for the physical meaning and relative importance of the different factors. They often serve as the basis for codes and regulations. In this day and age, they also allow the engineer to verify the results of more complicated computer analyses (“reality checks”). This is a very important function of the simplified methods, as already noted by Ing. Enrique Santoyo in his 20th Carrillo Lecture (Santoyo, 2010). It is interesting that until about 30 years ago or so, that it before the age of powerful accessible computers, there was no need to justify or defend these simplified methods, as generally there was nothing else engineers could use. But with the advent of computers, things have changed, and in principle the engineer can analyze very complicated systems and loadings without the need to simplify the theory. As a result, some people are tempted to go only that route with the exclusion of more traditional simplified methods, which as noted by Santoyo (2010) is not a good idea at all. Table 2 lists a number of simplified solutions and associated publications, proposed with the participation of the author over the years, for a variety of soil dynamics systems ranging from the SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 8 free field and earth dams to shallow and deep foundations, and for excitations covering mainly seismic and machine vibrations. Table 2. Simplified Solutions proposed for various Soil Dynamics problems with participation of the author. Author(s) Year Problem Addressed by Simplified Solution Roesset, Whitman and Dobry 1973 Estimated modal damping of structure with consideration of dynamic soil-structure interaction Dobry, Oweis and Urzua 1976 Fundamental period of soil profile on rigid rock Dobry and Gazetas 1985 Dobry and O’Rourke 1983 Bending moment in pile due to seismic kinematic effect Dobry, Mohamad, Dakoulas and Gazetas 1984 Estimation of seismic shear strains in earth dam for evaluation of liquefaction and flow failure Gazetas and Dobry 1984 Dobry and Gazetas 1985 Equivalent horizontal spring and dashpot at the top of a pile Dobry and Gazetas 1985 Dobry and Gazetas 1986 Dobry, Gazetas and Stokoe 1986 Gazetas, Dobry and Tassoulas 1985a Gazetas, Tassoulas, Dobry and O’Rourke 1985b Springs and dashpots for surface foundations of arbitrary shape Vertical spring and dashpot for embedded foundations of arbitrary shape 1985 Dobry and Gazetas Dobry and Gazetas 1988 Dobry 1991a Equivalent springs and dashpots of floating pile groups Dobry Use of Roesset and Whitman (1969) theoretical solution for steady-state amplification, to provide 1991b estimate of peak of Ratio of Response Spectra for soil deposit on flexible rock 1995 Dobry, Taboada and Liu 1995 Dobry Decrease with distance to river or lake, of lateral spreading of ground due to sand liquefaction in an earthquake SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry 3. XXI Nabor Carrillo Lecture 9 THE MACHINE FOUNDATION PROBLEM The rest of this Lecture describes the development of simplified procedures for shallow machine foundations that took place over most of the 20th Century. While I played a role on this in the 1980’s through my collaboration at that time with Prof. George Gazetas, a number of the key breakthroughs had already taken place by then, through the work of such excellent researchers as Reissner (1936), Reissner and Sagoci (1944), Arnold et al. (1955), Bycroft (1956), Barkan (1962), Lysmer and Richart (1966), Hall (1967), Whitman and Richart (1967), Elorduy et al. (1967), Gladwell (1968), Richart et al. (1970), Luco and Westmann (1971), Veletsos and Wei (1971), Kausel and Roesset (1975), Johnson et al. (1975), Wong and Luco (1976, 1978), Gazetas and Roesset (1976, 1979), Dominguez and Roesset (1978), and Roesset (1980). Let me repeat again that, although we call it for simplicity the machine foundation problem, we are really solving here all kinds of soil-structure interaction problems where the loads may be caused not only by machines but also by earthquakes or ocean waves. 3.1 Vertical Vibration of Rigid Mass Figure 4 depicts the original machine foundation problem, which looks deceptively simple. Figure 4a shows the system. It is a perfectly rigid cylindrical mass M of radius R, located on the Figure 4. Machine foundation problem. surface of an elastic half-space representing the soil, which is the same elastic half-space we use in static Soil Mechanics to calculate the Boussinesq (1885) solution for the stresses under a foundation, or in the Newmark (1942) charts to calculate foundation settlement. As usual, we need only two elastic parameters to characterize this isotropic homogeneous material, which we select as being the shear modulus, G, and the Poisson’s Ratio, μ. In addition, because of the inertia forces associated with the dynamic loading, we also need the mass density, ρ, which in practical terms is usually the total unit weight of the dry or saturated soil divided by the acceleration of gravity. In the simplest case of vertical vibration shown in Fig. 4b, the applied SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 10 vertical load at the top of the mass varies sinusoidally with time, with amplitude Pm and frequency f, say in cycles per second. The question to be solved is to calculate the vertical displacement of the foundation, w, for given P, f and the rest of the parameters of the problem1. This problem, that at first sight looks so simple, attracted the attention of top analytical researchers during a period spanning 30 years, and was completely solved only in the 1960’s when computers became available (Lysmer and Richart, 1966). The reason why the problem is so difficult to solve analytically, is that it involves a mixed boundary dynamic condition, with the displacement of the ground surface being constant over the area of the foundation, while the vertical normal stress outside the area of the foundation is constant and equal to zero. What would a simplified solution look like? As indicated in Fig. 5, we may simplistically try to replace the whole elastic half-space by an equivalent elastic spring, k, selecting the value of k so that it gives us the right w for a given P. In principle, this value of k will be a function of the properties of the half-space, G, ρ, μ, of the radius of the foundation, R, and of the frequency of the loading, f. With luck, perhaps we will conclude that k is not very sensitive to the frequency f. This would be ideal as we want to be able to use the solution also for loadings which are not sinusoidal. In this case we would have a Simplified Solution characterized by an equivalent vertical spring, k, which is frequency-independent. The problem with this is that with such a frequency-independent spring, what we have is the system of a mass connected to a spring of Fig. 5. This is a well known system in Dynamics called the undamped simple oscillator, or undamped single degree-of-freedom system, that for the applied sinusoidal load has the solution for the displacement, w = (Pm/k) [sin(2πft – α)]/[1 – (f/fn)2]2, which becomes infinite when the loading frequency, f, becomes equal to the natural frequency of the oscillator, f = fn = (1/2π)(k/M)1/2. On the other hand, all indications were that there is no value of f for which the displacement w of the foundation in Figs. 4-5 becomes very large, let alone infinite. Therefore, a spring is not enough, and some element has to be added to the equivalent simplified system of Fig. 5 that not only stores energy, as the spring does, but also dissipates energy, hence avoiding infinite values for w. The researchers added a linear viscous dashpot to the system to take care of the necessary energy dissipation, as shown in Fig. 6, which transforms the equivalent system into a damped simple oscillator. Due to the dashpot, the displacement w is never infinite, whatever the frequency of the loading. The spring k generates a force that is proportional to the displacement, w, of the mass, while the dashpot c generates a force that is proportional to the velocity of the mass, dw/dt. As a result, the equation of motion of the system that allows solving the problem once the values of k and c have been determined is: 𝑀 𝑑2 𝑤 𝑑𝑡 2 +𝑐 𝑑𝑤 𝑑𝑡 + 𝑘𝑤 = 𝑃 = 𝑃𝑚 sin(2𝜋𝑓𝑡) (1) This is, in fact, the correct form of the exact solution for the original problem of a mass on a foundation lying on a half-space shown in Fig. 4, and what is left is to determine how these 1 It can be shown that the time history of w is also sinusoidal of the same frequency of the loading, w = w m sin (2πft-α), so the problem is reduced to the determination of the amplitude, w m, and phase angle, α, of the displacement response. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 11 spring and dashpot depend on the parameters of the problem. Of course, that is the difficult part that took 30 years to solve. Figure 5. First too simplistic attempt of a Simplified Solution. Figure 6. Second more realistic attempt of a Simplified Solution. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 12 As mentioned before, a number of efforts were made to develop this equivalent spring and dashpot, forgetting about the mass for the time being, and replacing the contact area between mass and soil by a massless rigid circular plate welded to the surface of the half-space (Fig. 7). Finally, in 1966, in his doctoral thesis at the University of Michigan under the direction of Prof. Richart, Lysmer found the exact solution to the problem with the help of this powerful new tool called computers (Lysmer and Richart, 1966). Then they proceeded to find that a frequencyindependent Simplified Solution was possible, because in this particular case neither the spring nor the dashpot were very sensitive to changes in the frequency f. Figure 7 shows Lysmer’s proposed approximate expressions for the equivalent vertical spring, kv, and dashpot, cv. The two expressions are a marvel of simplicity. Figure 7. Frequency-independent Simplified Solution for vertical loading, also labeled “Lysmer’s Analog” (Lysmer and Richart,1966). The value of the spring is kv ≈ 4GR/(1-μ), which is the same as the static vertical stiffness for a rigid circular foundation obtained by integrating the static Boussinesq solution for the half-space. That is, the selected kv corresponds to f = 0. The expression for the dashpot is even more interesting. It can be expressed either in terms of the shear modulus, G, or alternatively in terms of the shear wave velocity of the soil, Vs. That is, cv ≈ [3.4/(1-μ)] (Gρ)1/2 R2 = [3.4/(1-μ)] (ρVs) R2, taking advantage of the fact that Vs and G are related through the basic elasticity equation: 𝐺 1/2 𝑝 𝑉𝑠 = ( ) (2) Figure 8 includes the comparison presented by Lysmer and Richart for the dynamic response curves for the cylindrical mass on the half-space of Fig. 4. The solid line is the exact solution and the dashed line is the simplified solution calculated with the frequency-independent spring and dashpot of Fig. 7. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 13 Figure 8. Vertical dynamic response of mass on a half-space: comparison between Lysmer’s Analog and exact solution (Lysmer and Richart, 1966). The graph of Fig. 8 plots the normalized amplitude of the mass displacement, wm, versus the normalized frequency of the loading. The curves have the typical shape of response of a damped single oscillator, showing that the system has quite a bit of damping; this is reflected in the fact that the peaks of the curves are all below three. But the most important conclusion from our viewpoint is that the Simplified Method predicts very well the exact response, so it can be used by engineers with confidence as a basic tool for these kinds of calculations. And in fact, this simplified solution and corresponding expressions of vertical spring and dashpot for a circular surface foundation, are listed today as standard equations in a number of textbooks and foundation manuals. Table 3 summarizes the history of the development of the solution. Lamb (1904) had solved the problem of the concentrated vertical dynamic load at the surface of an elastic half-space, which is the dynamic counterpart of the Boussinesq (1885) solution for a concentrated static load. In the 1930’s, Reissner (1936) integrated Lamb’s solution over a circular area assuming a constant pressure distribution, that is he provided a solution for a perfectly flexible foundation rather than a rigid foundation. After various efforts containing assumptions and approximations by several authors in the 1950’s and early 1960’s; finally Lysmer and Richart (1966) solved the problem numerically using a computer and provided the beautiful Simplified Solution of Fig. 7, where the half-space below the foundation is replaced by a frequency-independent spring and a frequencyindependent dashpot. Table 3 also lists two 1967 papers by Richart and Whitman, where they SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 14 validated the Simplified Solution with field tests and developed a design procedure, making the new solution available to the engineering community. Table 3. Theoretical and Simplified Solutions to machine foundation problem. Author(s) Year Contribution Lamb 1904 Solution for concentrated vertical force on surface of half space (Dynamic Boussinesq Problem). Reissner 1936 Solution for flexible circular foundation assuming uniform load. Quinlan 1953 Approximate solution for rigid circular foundation assuming static pressure distribution. Sung 1953 Solutions for various assumed pressure distributions. Bycroft 1956 Simplified solution by averaging displacements over foundation area. Hsieh 1962 Introduced idea of frequency-dependent equivalent spring and dashpot. Lysmer and Richart 1966 Obtained exact frequency-dependent spring and dashpot for rigid circular foundation using computer. Proposed approximate frequency-independent spring and dashpot as Simplified Solution for engineers (Lysmer’s Analog). Richart and Whitman 1967 Whitman and Richart 1967 3.2 Validated Lysmer’s Analog with field footing vibration tests. Design procedure based on Lysmer’s Analog. Horizontal vibration After Lysmer and Richart solved for the vertical loading by combining theory with computer calculations, the rest of the solutions came fast within the next few years for other dynamic excitations acting on the same surface circular foundation. Figure 9 shows the case of horizontal loading, where again it was possible to obtain frequency-independent expressions for the horizontal spring and dashpot. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 15 Figure 9. Frequency-independent Simplified Solution for horizontal loading (Hall, 1967; Luco and Westmann, 1971; Veletsos and Wei, 1971)). 3.3 Simplified systems for design and equivalent circle In their 1967 paper, Whitman and Richart summarized all these Simplified Solutions for surface or very shallow circular foundations, and gave recommendations on how to use them in actual engineering projects. These recommendations included how to produce the necessary values of soil shear modulus and Poisson’s Ratio needed to calculate the spring (stiffness) and radiation dashpot for vertical, horizontal, rocking and torsional excitations (Fig. 10). Finally, they also provided recommendations on how to combine these radiation dashpots with the internal damping associated with the energy dissipated by the cyclic loading within the soil itself, mostly in friction. Table 4 lists the expressions for the four static stiffnesses, recommended by Whitman and Richart (1967) as the frequency-independent spring constants for the respective Simplified Solutions2. They also suggested that foundations which do not have a circular shape, like square, rectangular, etc., should be first transformed into an equivalent circle before using those simplified solutions. These simplified solutions for the circular surface foundation were an important breakthrough, and their use for all kinds of foundation shapes through the equivalent circle method has served the profession well. However, they still left open the issue of what to do when the foundation is embedded rather than being at the surface or very close to it, and also how good is the equivalent circle approximation, say, for a very long rectangle or a similar elongated foundation shape. 2 The equation in Table 4 and Fig. 9 for kho was obtained a few years later by Luco and Westmann (1971) and Veletsos and Wei (1971), and is slightly different from the approximate expression proposed by Hall (1967) and used by Whitman and Richart in their 1967 paper. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 16 Figure 10. Equivalent simplified systems for design based on equivalent circular foundation (Whitman and Richart, 1967). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 17 Table 4. Static stiffnesses of rigid circular foundation on the surface of an elastic half-space. Today’s mathematical and computational techniques are much more powerful than those available in the 1960’s, and a number of these cases have been solved by a combination of analytical and numerical methods in the last 30-40 years, with many articles, tables and charts published in research journals and books. Furthermore, powerful dynamic finite elements computer programs than can solve your specific problem for any shape and any embedment, as well as for arbitrary soil layering, are now commercially available, and they are routinely used in very important or critical structures such as nuclear power plants or large bridges. But in most projects, simplified solutions continue to be used. Even in projects like a large bridge, a finite element program may be used to analyze the abutments and the foundations of the piers, with the simplified methods utilized to analyze the foundations of the approaches to the bridge. Therefore, there was clearly a need to extend these simplified solutions produced by Lysmer, Richart and Whitman, to both embedded foundations and to noncircular shapes. I will be addressing these other cases later in this Lecture, but it turns out that before we can do that, it is necessary to clarify first the physical origin of the equivalent viscous dashpots shown in Figs. 7 and 9 for the vertical and horizontal vibrations. So, let me focus now on these viscous dashpots. 3.4 Viscous dashpots and radiation damping The problem can be posed as follows (Fig. 11): The soil is represented by a purely elastic material filling the half-space, which does not have any internal damping and therefore has no way to dissipate energy in the material itself. If the foundation had been on top of a closed elastic system with rigid boundaries surrounding the soil, the displacement of the foundation would have been infinite when vibrating at the natural frequency of the system. But because the system is open instead of closed, energy escapes in the form of waves propagating in the soil, with this energy never coming back, and this is why the displacement of the foundation is never infinite. This form of elastic energy dissipation in the form of waves traveling away from the foundation is called Radiation (or Geometric) Damping, and it is the physical origin of the vertical and horizontal viscous dashpots I mentioned before, which are just approximate mathematical representations of the phenomenon. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 18 Figure 11. Radiation of energy by waves propagating from foundation (Lambe and Whitman, 1969). Which types of waves are these, and what helpful information can we obtain from wave propagation theory? Let us take a look. It is useful to start with the case of horizontal vibrations, which is simpler. Figure 12 presents again the Simplified Solution for the surface circular foundation of Fig. 9. The same equations for kh and ch are repeated at the bottom of Fig. 12. The viscous dashpot of expression, ch = [4.64/(2-μ)] ρVs R2, represents the radiation energy carried away from the foundation by the waves propagating in the soil. Figure 12 also calculates this expression for two values of the Poisson’s Ratio, 0.33 and 0.50, which approximately cover the range of interest of this parameter for soils. The dashpot becomes, respectively, 2.78 ρVs R2 and 3.09 ρVs R2. These two expressions are numerically very similar, indicating that the dashpot is not very sensitive to the exact value of the Poisson’s Ratio of the soil, Furthermore, and this is very important from a theoretical viewpoint, the numerical coefficients in the two expressions are within 10% of the value of π = 3.14. So, what the simplified solution fitted to the original exact solution is telling us is that the horizontal viscous dashpot is approximately the product of ρVs (which depends only on the properties of the soil), times the area of the circle, π R2 (which depends only on the geometry of the contact area between soil and foundation). That is, ch ≈ ρ Vs A = (ρ Vs) (πR2). This is very interesting and has significant theoretical as well as practical implications. It is useful at this point to look at some basic results of wave propagation theory relevant to the original system of a plate on a half-space of Fig. 12. This is done with the help of Fig. 13. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 19 Figure 12. Horizontal radiation dashpot for two Poisson’s ratios. Figure 13. Perfect viscous dashpot analog for 1D shear wave propagation. Figure 13 assumes that we have placed the same massless rigid circular plate of Fig. 12, but now on the surface of an infinitely long elastic solid tube of radius R, with the tube in Fig. 13 having the same properties of the half-space of Fig. 12. Figure 13 is an example of one-dimensional elastic wave propagation, in which the horizontal vibration of the plate generates a pure shear wave that propagates vertically down with a wave speed Vs, while inducing horizontal displacements along the tube. It turns out that it is possible to replace mathematically the tube SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 20 under the plate by an equivalent horizontal dashpot, ch = ρ Vs A = (ρ Vs) (π R2). The equivalent horizontal spring, kh = 0 in this case. It is important to note that this equivalent dashpot, ch = ρ Vs A = (ρ Vs ) (π R2), is not an approximation but is an exact mathematical analog to the infinite tube in every respect. The product ρ Vs is so important in wave propagation and Soil Dynamics that it has been given a special name: it is called the Shear Impedance of the material. This Impedance, ρ Vs, completely controls the relation between load and displacement at the interface between the massless rigid plate and the elastic material below for 1D wave propagation in Fig. 13. The expression, ch = ρ Vs A, is not restricted to the case when the load Q in Fig. 13 is sinusoidal, but it is valid for any time history of Q = Q(t). Also, the expression is still rigorously valid for noncircular shapes of the rigid massless plate and associated cross-section of the elastic tube, including square and rectangular, with the expression for the dashpot being always ρ Vs A, where A is the actual area of the square, rectangle, or other shape. If the massless plate located on top of the elastic tube were excited vertically instead of horizontally, as done in Fig. 14, a compression-extension wave (similar to a sound wave) will propagate down the tube. This 1D wave propagation model in Fig. 14 is relevant to the original problem of vertical excitation of the foundation on a half-space of Figs. 4-7. Figure 14. Perfect viscous dashpot analog for 1D compression-extension wave propagation. In Fig. 14, when the massless plate vibrates vertically, as the compression-extension waves propagate down, the material in the tube alternately compresses and extends in the vertical direction, generating vertical displacements along the tube. This compression-extension wave in the tube of Fig. 14 will propagate at a speed greater than the shear wave velocity, with this speed, V, controlled either by the constrained modulus, D, V = VD = (D/ρ)1/2 , or by the Young’s Modulus, E, V = VL = (E/ρ)1/2. The actual wave speed, V, will be either of these two values (or a SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 21 value in between), and it will depend on how freely can the rod expand or contract laterally. In one extreme case, if the tube is completely surrounded by a rigid wall and cannot strain laterally at all (similar to the situation in a soil consolidometer test), the wave velocity will be high, VD = (D/ρ)1/2 . On the other hand, if the tube is completely free to expand or contract laterally (similar to a triaxial or unconfined compression test), the wave velocity will be lower, VL = (E/ρ)1/2. Table 5 lists normalized values of VL and VD for two values of the Poisson’s Ratio. But whatever the value of this wave speed for the compression-extension waves, the whole infinite rod can always be replaced analytically by a vertical dashpot equal to the Impedance of the material, ρV, times the actual area of the plate, A, where V is the actual speed of the wave traveling in the tube. Table 5. Compression-extension wave velocities relevant to vertical vibration of plate on a half-space. What does this all mean for the original problem of the circular rigid plate on the surface of the half-space? As sketched in Fig. 15, the actual foundation problem is typically a 3D situation, and in first approximation the waves under the plate do not travel vertically but go out in many directions controlled by the maximum angle θ shown in the figure. This general picture is true for both vertical and horizontal excitations. The problem for the vertical vibrations sketched in Fig. 15a is further complicated by the fact that compression-extension waves predominate only very close to the vibrating plate, with other waves including shear waves appearing at longer distances from it. But from the viewpoint of this discussion, the rather simplified sketch of Fig. 15a will suffice, as the dynamic vertical load-displacement relation for the plate depends on the speed of this compression-extension excitation generated in the soil very close below the plate, rather than on the more distant waves that develop in the soil in the far field. Consider first the case of the horizontal excitation in Fig. 15b, which is simpler. By now we can agree that the horizontal vibrations of the plate are mainly shearing the interface with the soil, so that assuming that the waves sent down into the soil are mainly shear waves makes intuitive sense. We know from theory (Fig. 13) that if the angle θ was zero in Fig. 15, that is if all the shear waves were going down vertically as 1D waves, the equivalent horizontal dashpot would be exactly ch = ρ Vs A. As we saw before when discussing Fig. 12, the correct solution in this case, while not exactly ch = ρ Vs A, is numerically close to it, within 10%, and it is also approximately independent of frequency. This suggests that for this case of horizontal vibration of a circular plate in Fig. 15b, it would appear as if the angle θ of the waves is actually not far from zero, and SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 22 that the problem is surprisingly close to being one-dimensional. How can this be? Because of a phenomenon known as destructive wave interference, the waves going out at angles greater than zero tend to cancel each other, leaving only shear waves that travel down more or less vertically in this particular case. Figure 15. Waves and radiation damping in vertical and horizontal vibrations This is a very important conclusion for the extension of the Simplified Solutions to foundation shapes that are not circular, because if that conclusion was true for any foundation shape, we could say that the equivalent horizontal dashpot could always be calculated using this expression ρ Vs A, where the area A is just the actual total area of contact between the foundation and the soil. It turns out that things are not so simple, but still, this gives us a starting point for the development of simplified solutions for noncircular shapes. Let us now turn our attention back to the vertical vibration of a circular foundation in Fig. 15a. We apply the same logic, except that in this case the compression-extension wave velocity to put in the equation ρ V A is not obvious, because as we saw in Fig. 14, the corresponding compression-extension waves may travel relatively slow or faster depending on the lateral straining of the tube. We solved this by inventing a new wave velocity, that we label V La, defined by the expression, VLa = 3.4 Vs /(π(1-μ). The symbol VLa stands for “Lysmer’s Analog wave velocity,” and it is simply the value of the velocity V = VLa that, when inserted it in the expression ρ V A, gives the correct cv defined by Lysmer in his Simplified Solution to the original problem, cv = [3.4/(1-μ)] ρVs R2 (see Fig. 7). If we consider the range of possible wave speeds for compression-extension waves in soils, the value of this new wave velocity VLa is relatively low, and close to the value of wave velocity controlled by the Young’s Modulus of the material (see Table 5). This makes sense, because it would intuitively seem that the soil under the foundation, when compressed vertically as in Fig. 15a, is relatively free to expand laterally, so the SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 23 situation in the soil immediately below the foundation is closer to a triaxial than to a consolidometer test. I just spent some time going over the details of these derivations in Figs. 15a and 15b. But the effort is worth it, because the two expressions for cv and ch as functions of VLa and Vs in Fig. 15, are the key to the development of a whole new family of Simplified Solutions, not only for foundations of noncircular shapes, but also for embedded foundations. In the early 1980’s, Prof. George Gazetas and I explored this approach in some detail, and the approach now has become part of the accepted State of Practice for the approximate calculation of equivalent foundation dashpots. 3.5 Vertical radiation dashpot for embedded foundation An obvious first application of this simplified concepts is to the same case of the cylindrical rigid foundation excited vertically, but now embedded in the half-space (Fig. 16). We assume that the base radiates energy in the form of compression-extension waves traveling with the Lysmer’s Analog wave velocity, so the radiation dashpot associated with the base is ρVLa Ab, where Ab is the area of the base, in this case πR2. In short, we assume that this dashpot associated with the base is identical to the one found by Lysmer when the foundation was at the ground surface and not embedded. Figure 16. Simplified vertical radiation dashpot for embedded circular foundation (modified after Gazetas et al., 1985a). We also assume that the perimeter of the cylinder when vibrating vertically is sending shear waves into the soil which propagate horizontally with the wave speed Vs. This is what our intuition tells us and it seems reasonable. This gives us a second dashpot associated with this radiation of energy at the contact between soil and foundation sidewall, which is shown here, of SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 24 value ρVs Aw, where Aw is the total area of contact of the sidewall. And because the two dashpots are in parallel, we can just add up the two values to get the total dashpot for the whole embedded foundation. This is done in Fig. 16, providing a simple estimated expression for the equivalent vertical radiation dashpot of the embedded foundation cv ≈ ρ VLa Ab + ρ Vs Aw. There is a need to be careful here, as we have jumped a lot ahead of a more rigorous analysis, and have made a number of assumptions based only on our intuition. It turns out that this very simple expression works well for this case, as I will show you in a minute. But it does not work so well in other cases, and one should always check these simplified models against more rigorous solutions before applying them with confidence. On the other hand, once it is shown that a Simplified Solution like this works, it provides a tremendous amount of insight to researchers and engineers. Let me give you two conclusions out of this expression in Fig. 16, so you can appreciate better what I am saying. The first conclusion has to do with the contribution of the embedment to the total vertical dashpot. While the value of VLa acting at the base is typically 50% to 100% greater than the Vs acting on the sidewalls (see Table 5), the area of the sidewall itself tends to be much greater than the area of the base. For example, if the depth of embedment D = R, which is not a large embedment, the wall area will be twice that of the base, so already the wall is contributing roughly as much as the base, and for greater embedment it contributes significantly more to the total dashpot than the base. Therefore, we should expect that embedded foundations will have a lot of damping, having less dynamic response at the critical frequencies than surface foundations, which is good. But the counterpart to this, and this is my second conclusion, is that before taking advantage of this beneficial effect of the embedment, you better make sure that you have a good contact between the sidewall and the soil. If you do not, you may have a foundation with much less damping that you thought you had, and that may be dangerous. As embedded foundations are often constructed first in a trench leaving a gap at the sides, and the gap is filled later with a sandy fill that is sometimes difficult to compact because of the lack of space, there is always the possibility that the contact is not so good. So, the engineer may want to do a parametric study assuming that the second term of the expression in Fig. 16 does not exist, it exists, or it is only partially efficient, by multiplying this second term of the expression by a factor between 0 and 1. And this is the great advantage of such a Simplified Solution; it allows the engineer to use his/her judgment in the analysis and to keep control of the situation instead of relying completely on a complicated computer program he may not understand or control. Figure 17 shows a comparison for the dashpot of a circular embedded foundation, between the predictions of this Simplified Solution and rigorous dynamic finite element calculations. The curves in the figure, corresponding to the Simplified Solution, show a slight effect of frequency because the exact dashpot was used for the contribution of the base, instead of the simplified frequency-independent dashpot of Fig. 16. The comparisons in Fig. 17 correspond to various degrees of embedment up to an embedment equal to the diameter of the foundation. The agreement between Simplified and rigorous solutions is excellent, and confirms that a significant embedment with good contact between sidewalls and surrounding soil may provide a total radiation dashpot that is several times the value of the dashpot of the surface foundation. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 25 Figure 17. Vertical radiation dashpot of embedded circular foundation: comparison between simplified (curves) and dynamic finite element results (data points) (Gazetas et al., 1985a; Day, 1977). 3.6 Vertical static spring for embedded foundation Figure 18 includes the corresponding expression for the static vertical spring, kv0, of the same circular embedded foundation addressed in Figs. 16-17. As indicated in Fig. 18, the value of kv0 is obtained by the multiplication of three factors. The first factor, 4GR/(1-μ), is just the expression for the stiffness of the surface foundation without embedment discussed before. The second factor, (1+0.1D/R), is the “trench coefficient,” which is a small correction, and corresponds to placing the foundation at the bottom of the trench of depth D, but without any contact between the sidewall and the soil. And finally, the third factor, [1+0.19(Aw/Ab)2/3], which provides a much bigger correction, is associated with the actual contact area between the foundation wall and the soil, Aw. Again, if the engineer has doubts about the quality of this contact, he/she should conduct a parametric study which includes reducing this third factor to a value closer to, or equal than one. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 26 Figure 18. Vertical static spring of embedded circular foundation including trench and soil-wall contact factors (Gazetas et al., 1985a). 3.7 Embedment and dynamic response It is important to see how this very significant influence of the embedment on the radiation damping translates into a much reduced dynamic response when subjected to dynamic loads. Both analysis and experiments have consistently verified the importance of the effect. This is illustrated by Fig. 19, that shows the results of experiments using three small-scale models conducted by Novak (1970), where he excited vertically and horizontally a foundation embedded in a partially saturated dense loess loam. The effect of embedment is similar for vertical and horizontal excitations. Let us focus on the vertical excitation, shown in the upper plot of Fig. 19. The first experiment for the fully embedded foundation with good contact with the surrounding soil, labeled “A,” produced a response curve of displacement versus frequency which is very flat, with low values of the dynamic displacement. The curve indicates a highly damped system with a very stiff equivalent spring. In the second experiment, labeled “B,” the sidewall contact was weakened by placing a relatively well compacted sandy fill between the foundation and the surrounding soil; now the response curve is a bit higher and has a small peak at a frequency of about 3000 revolutions/minute. And then in the third experiment, labeled “C,” the model foundation was just placed at the bottom of the trench without any contact with the soil at the sides. Clearly in this third experiment there is much less damping in the system, with a very high peak and large displacements at a frequency of about 2000 revolutions/minute. The figure provides a dramatic illustration on how different the dynamic response of a foundation can be without the benefit provided by the contact with the surrounding soil. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 27 Figure 19. Experimental verification of soil-wall contact effect on dynamic vertical and horizontal responses of embedded circular foundation (Novak, 1970). 4. EQUIVALENT SPRINGS AND DASHPOTS FOR NONCIRCULAR SHAPES I want to use the rest of this Lecture discussing the development of Simplified Methods for noncircular foundation shapes that took place in the 1980’s, both for surface and embedded foundations. Table 6 lists the publications reporting the main results as well as the two summaries by Gazetas (1990, 1991). Originally it grew out of a collaboration at the beginning of the 1980’s between Prof. George Gazetas and myself, built on some of the ideas I discussed before, especially for the radiation damping generated by the base of the foundation and the foundation sidewalls. While I played a role at the beginning of the process and I am a co-author in the first three papers listed in Table 6, Prof. Gazetas was the driving force of the whole project, and pursued it systematically through a series of studies and publications over a number of years, until he was able to put it all together in two publications listed at the bottom of Table 6. Gazetas (1990) is a chapter in a Foundation Engineering Handbook, and Gazetas (1991) is an article in the Journal of Geotechnical Engineering of the American Society of Civil Engineers. In these two publications, he provides charts, formulas and numerical examples, ready to use by practicing engineers SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 28 Table 6 gives an idea of how magnificent was this project by Prof. Gazetas. For each of the six degrees of freedom, vertical, torsional, horizontal in the two directions, and rocking in the two directions, he compared possible simplified solutions for springs and dashpots with rigorous computer results, modifying the simplified solutions as needed to fit the rigorous results, and arrived to recommendations that engineers could use. He also provided convincing experimental validation for his calculations. The work was further complicated by the strong coupling between horizontal and rocking in embedded foundations, that he also addresses in his 1990 and 1991 publications. You can appreciate the complexity of the work involved in getting the correct simplified solutions for horizontal, rocking and torsional springs and dashpots of embedded foundations, by noticing that he needed a total of six papers to present all necessary results. My main purpose today is to provide you with an introduction to the basic approach used by Prof. Gazetas, as an introduction to his 1990 and 1991 publications, which may be useful if you need to use them in one of your projects. Table 6. Simplified Solutions for surface and embedded foundations of arbitrary shape (Gazetas and co-workers, 1985-91). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry 4.1 XXI Nabor Carrillo Lecture 29 General problem formulation The general formulation for both surface and embedded foundations of arbitrary shape is presented in Fig. 20. The base has an arbitrary shape and an area, Ab, which is embedded at depth D, but with the possibility of the actual depth of contact of the foundation wall with the soil being smaller, d < D, and with the actual total contact area between the sides of the foundation and the soil being Aw. An important tool of these procedures is a rectangle 2L x 2B that circumscribes the actual base area. This rectangle defines the degree of elongation of the actual area by its aspect ratio, L/B. For both square and circular foundations the aspect ratio is 1.0. Figure 20. General formulation for surface and embedded foundations of arbitrary shape (Gazetas, 1991). This surface or embedded foundation is located in a half-space which has the same properties already discussed (G, μ and ρ), to which it is added now the internal damping ratio of the soil, labeled β. It is not necessary to worry about β through most of the derivations, with all calculated dashpots being radiation dashpots. Later in this Lecture I will provide the general expression used to increase the values of these radiation dashpots in order to incorporate the effect of β. The solutions presented by Gazetas (1991) generate springs and dashpots for six degrees of freedom, all shown in Fig. 20: vertical loading; horizontal loading in both the short direction, that is along the y-axis; horizontal parallel to the long direction x; a rocking moment in the short direction, that is around the x-axis; rocking around the y-axis; and finally, a torsional moment around the z-axis. It is useful to illustrate some of the complexities that must be considered in the formulation of these Simplified Solutions, by considering the calculation of the horizontal radiation dashpot along the long axis x for the embedded foundation of Fig. 20. The foundation is moving back and forth horizontally in the x-direction, and the question is: What is happening in SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 30 terms of the waves generated by the different contact areas? The base is clearly shearing the soil, so you would expect its contribution to the total radiation dashpot to be proportional to the area Ab and to the shear wave velocity of the soil Vs. The situation with the foundation walls is more complicated. As the foundation moves back and forth in the long direction, the two walls parallel to x in the figure, are also shearing the soil so their contribution should be proportional to Vs. But the two walls perpendicular to x, are pushing back and forth against the soil behind them, so you would expect that their contribution should not be proportional to Vs but to the other wave velocity we defined before for compression-extension waves, the Lysmer’s analog wave velocity that we labeled VLa. And there are also other walls in Fig. 20 which are neither parallel nor perpendicular to x, which further complicate the situation. Figure 21 presents a more detailed formulation for only the base of the surface or embedded foundation, for arbitrary shapes including circular, square, rectangular or in fact any shape. The graph shows again the three axis, x, y and z, all passing by the centroid O of the area of the base, and the three loads Hx , Hy and V parallel to the three axes, as well as the three moments around each of the three axes, Mx, My and Mt. The actual area of the foundation is called A in Fig. 21, while it is labeled Ab in Fig. 20 and other plots. There are other parameters associated with the area A which are also important for the calculations. They are (see Fig. 21): the area moment of inertia around the x axis, Iax; the same area moment of inertia around the y axis, Iay; and the polar area moment of inertia around the z axis, J = Iax + Iay. These three area parameters are the same studied in school in the Strength of Materials course when looking at sections of beams and columns subjected to bending or torsion. It turns out that these three area moments of inertia are needed in the Simplified Method when computing the springs and dashpots for rocking and torsional vibrations. And finally, the length and width of the circumscribed rectangle, L, B, and the aspect ratio of the foundation, L/B, are also listed in Fig. 21. 4.2 Vertical spring for surface foundation The next few figures show some selected results for the surface foundation of arbitrary shape, reproduced from Dobry and Gazetas (1986). The charts for the vertical spring in Figs. 22-23 are representative of other similar charts and formulas associated with equivalent springs for horizontal, rocking and torsional vibrations presented by Dobry and Gazetas (1986) and Gazetas (1991). The chart in Fig. 22 allows calculating a dimensionless parameter Sz0, which is used to estimate the static vertical spring, kz0, through the expression, kz0 = Sz0 (2LG)/(1-μ). The parameter along the abscissas is A/4L2, which for the special case of a rectangular shape is equal to the reciprocal of the aspect ratio of the rectangle, (L/B)-1 = B/L. That is, is A/4L2 = 1.0 for a square shape, A/4L2 = 0.33 for a rectangle of aspect ratio 3, etc. Why did we select this strangely looking new parameter instead of simply using B/L? Because it turns out that the square and circular shapes, while they have the same aspect ratio of 1.0, have different values of S z0, as shown in Fig. 22 by the corresponding data points, so we had to invent a new parameter for the plot to work. The data points in Fig. 22 correspond to rigorous elasticity solutions, obtained either mathematically or numerically, that we retrieved from the literature. This includes the rigorous solution for the circle previously discussed in this Lecture, the solution for the square, and solutions for a number of increasingly elongated rectangles, ranging between L/B = 2 and L/B = 20. The figure also includes a number of data points for elliptical, triangular and other shapes, and finally we just fitted the equation for Sz0 shown on the figure which is the one we proposed for use in the Simplified Solution for vertical loading. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry Figure 21. XXI Nabor Carrillo Lecture Main parameters for surface foundation of arbitrary shape (Dobry and Gazetas, 1986). Figure 22. Vertical static spring of surface foundation of arbitrary shape (Dobry and Gazetas, 1986). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. 31 XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 32 Figure 23 presents the variation of the vertical spring kv = kz with frequency for a Poisson’s Ratio of 1/3. From now on, I will be showing some plots where springs and dashpots vary with frequency, as this is an unavoidable part of some of the Simplified Procedures. We were lucky before, that for the circular surface foundation the vertical and horizontal springs and dashpots do not change much with frequency; this allowed Lysmer and other authors to propose approximate springs and dashpots which are independent of frequency (Figs. 7 and 9). Figure 23 confirms this lack of sensitivity of the spring constant to changes in frequency for areas which are not elongated. That is, for squares, circles and short rectangles of L/B = 1 and 2, the curve in the graph is rather flat. This is still true for rectangles of L/B = 4, but it is not true at all for very long rectangles of aspect ratios of 6 or greater, which includes the very important case of strip footings, for which the dynamic stiffness increases very fast at low frequencies and then decreases. So in a case like that, the Simplified Solution must consider the effect of the frequency of the applied loading. Figure 23. Vertical dynamic spring of surface foundation of arbitrary shape (Dobry and Gazetas, 1986). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry 4.3 XXI Nabor Carrillo Lecture 33 Vertical and horizontal radiation dashpots Let me switch now my attention to the radiation dashpots of foundations of arbitrary shape. For the time being, we are still talking only about surface foundations, and Fig. 24 is essentially the same sketch of Fig. 15, of what happens to a surface foundation subjected to vertical and horizontal vibrations. When discussing Fig. 15 before for the case of a circular foundation, it was concluded that the vertical dashpot was given approximately by the expression, cv ≈ ρ VLa A, that is the Impedance times the area, where the impedance ρ VLa was controlled by the velocity VLa, the Lysmer’s Analog wave velocity, reflecting the speed of the compression-extension waves traveling down vertically below the foundation. And the horizontal dashpot, ch, was also given by the Impedance times the area of the foundation, but now with the impedance controlled by the shear wave velocity of the soil, Vs. These expressions for cv and ch independent of frequency, worked well for the circular shape, for which the value of the dashpot is about the same at low and high frequencies. Figure 24. Vertical and horizontal radiation dashpots of surface foundations of arbitrary shape: the high-frequency asymptotes (Dobry and Gazetas, 1986). Unfortunately this is not true anymore for elongated shapes like long rectangles, where the value of the dashpot changes dramatically with frequency. But what we did find, first following our intuition and then through a rigorous demonstration by Gazetas (1987), is that these expressions for the vertical and horizontal dashpots reproduced at the bottom of Fig. 24, are always true for SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 34 any foundation shape at high frequencies. That is, as the frequency increases, the angle θ of the waves in Fig. 24 becomes zero, the waves propagate vertically down as one-dimensional waves, and these two expressions become exact whatever the shape of the foundation. In other words, as f → ∞: 𝑐𝑣 = 𝑐𝑧 → 𝜌𝑉𝐿𝑎 𝐴 (3) 𝑐ℎ = 𝑐𝑥 = 𝑐𝑦 → 𝜌𝑉𝑠 𝐴 (4) This useful behavior of the waves generated by the foundation happens because of strong destructive wave interference at the high frequencies, which cancels all waves traveling at angles, θ > 0. It turns out that a similar phenomenon is well known in acoustics and is used in the analysis and design of speakers. This is why in rock concerts, the low frequency sounds are radiated out by speakers that cover a wide range of directions, while for the high frequencies, directional speakers are needed that radiate energy only in one direction more or less as a 1D beam of sound (Morse and Ingard, 1968; Massa, 1972). The finding summarized by Eqs. 3-4, represented an important breakthrough in our development of Simplified Solutions for two reasons. The first is that it tells us that for vertical and horizontal dashpots of surface foundations, we should be normalizing the actual dashpot obtained from rigorous solutions, dividing it by either ρ VLa A or by ρ Vs A, with the expectation that this ratio will become 1.0 at high frequencies irrespective of the shape of the foundation. And the second reason is that additional simple theoretical derivations tell us that for the rocking vibrations, the same thing should be happening at high frequencies of surface foundations as for vertical vibrations, because during rocking vibrations the foundations is also pushing and pulling vertically the soil below, with the controlling wave velocity still being VLa, but replacing the area A in the expression, by the area moment of inertia of the foundation around the corresponding axis (Iax or Iay). That is, for any arbitrary foundation shape, at high frequencies, the rocking dashpots, crx ≈ ρ VLa Iax and cry ≈ ρ VLa Iay. The same is true for torsional vibrations, which similarly to the horizontal loading also shears the soil below, where the expression at high frequencies for ct should still controlled by the shear wave velocity Vs, but with the area in the expression replaced by the polar moment of inertia of that area, J. In summary, Eqs. 3-4 for the three translational degrees of freedom are supplemented by Eqs. 5-7 for the three rotational degrees of freedom, indicating that, as f → ∞: 𝑐𝑟𝑥 → 𝜌𝑉𝐿𝑎 𝐼𝑎𝑥 (5) 𝑐𝑟𝑦 → 𝜌𝑉𝐿𝑎 𝐼𝑎𝑦 (6) 𝑐𝑡 → 𝜌𝑉𝑠 𝐽 = 𝜌𝑉𝑠 (𝐼𝑎𝑥 + 𝐼𝑎𝑦 ) (7) These ideas were confirmed by Dobry and Gazetas (1986) for the radiation dashpots, first for vertical and horizontal and then for rocking and torsional. Figure 25 illustrates the results for the horizontal dashpot in the short direction, versus frequency of loading. Following the conclusion summarized in Eq. 4, the variable along the ordinate axis in Fig. 25 is the dashpot cy divided by ρ Vs A. The figure confirms the previous conclusion that for non-elongated shapes (circles, squares and rectangles of L/B = 2), the ratio cy /(ρ Vs A) is about constant and close to one at all frequencies considered. On the other hand, for long rectangles and strip footings, cy is much SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 35 greater than ρ Vs A at low frequencies, with the ratio between the two converging to one at high frequencies, exactly as predicted. So this is the key plot for the radiation dashpot for horizontal loading in the short direction. The situation for horizontal loading in the long direction of the foundation is similar, and the plot for the vertical dashpot looks just like Fig. 25, except that VLa is used instead of Vs on the ordinate axis. Figure 25. Normalized horizontal radiation dashpot versus frequency of surface foundation of arbitrary shape (Dobry and Gazetas, 1986). 4.4 Torsional and rocking radiation dashpots Figure 26 includes the corresponding plot for torsional vibrations, where the torsional dashpot ct has been normalized to the product ρ Vs J, as suggested by Eq. 7. Here you see a different phenomenon, which is typical of the rotational vibrations of surface foundations including not only torsional but also rocking oscillations. This phenomenon is that the equivalent radiation dashpots for these rotational vibrations invariably go to zero as the frequency decreases and goes to zero, because of destructive wave interference which does not allow any energy to leave the neighborhood of the foundation when the frequency approaches zero. This is true for circular shapes, as shown by the corresponding curve for L/B = 1, and it is also true for long rectangles. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 36 In all cases, the torsional or rocking radiation dashpot is not constant but increases rapidly with frequency at the beginning, and then it stabilizes at the theoretical value at high frequencies, with this theoretical high-frequency value for the torsional case of Fig. 26 being the product ρ Vs J. A very similar pattern to that of Fig. 26, is exhibited by the rocking dashpots, which also go to zero at low frequencies and converge at high frequencies to the product ρ VLa Iax or ρ VLa Iay. This variation with frequency of rocking and torsional radiations dashpots certainly complicates the formulation of the Simplified Methods, but unfortunately this complication is unavoidable. Figure 26. Normalized torsional radiation dashpot versus frequency of surface foundationof arbitrary shape (Dobry and Gazetas, 1986). 4.5 Simplified systems including embedment Let us move on to embedded foundations of arbitrary shape. Figure 27 shows a sketch of the different effects contributing to the static horizontal stiffness of an embedded foundation: (i) the stiffness of the base of the foundation shearing the soil, which in first approximation is equal to the stiffness of the corresponding surface foundation; (ii) the trench effect, that is the increase in stiffness due to the foundation being placed at the bottom of the trench instead of at the surface of the soil; and very importantly (iii) the contribution of the contacts between the embedded SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 37 foundation walls and the surrounding soil. These are the same three factors described before in this Lecture, when discussing the vertical stiffness of an embedded circular foundation. Figure 27. Horizontal stiffness of embedded foundation of arbitrary shape: basic sketch (Gazetas and Tassoulas, 1987a). Figure 28 includes the expression for the horizontal static spring in the short direction, ky0, developed by Gazetas and Tassoulas (1987a) on the basis of rigorous calculations for several shapes and degrees of embedment. The expression assumes that the surface static stiffness, ky0,sur, has already been calculated, with the expression giving the factors greater than 1.0 that reflect the trench and sidewall effects. Please notice that the solution allows for the possibility of the foundation walls not being in contact with the soil near the top of the excavation, and it certainly allows the engineer to reduce the contribution of the sidewall contact if he/she does not trust the overall quality of the contact between the wall and the soil. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 38 Figure 28. Horizontal stiffness of embedded foundation of arbitrary shape: equation and correlation for the sidewall contact factor (Gazetas and Tassoulas, 1987a). And finally, Fig. 29 presents the basic sketch used by Gazetas and Tassoulas (1987b) to study the different contributions to the total horizontal radiation dashpot of an embedded foundation, of the various contact areas and types of waves. The area of the base always generates shear waves. For horizontal vibrations along the short direction as shown in the figure, the two walls perpendicular to the short direction push and pull against the soil generating compressionextension waves, so the contribution of that wall is proportional to the actual area of contact of that wall times ρ VLa. On the other hand, the two walls parallel to the short direction are shearing the soil, so their contribution should be controlled by the shear wave velocity Vs. Walls in the figure which are neither parallel nor perpendicular to the direction of motion, generate both shear (Vs) and compression-extension waves (VLa), as shown on the figure. The situation would seem to be too complicated for a Simplified Method. But Gazetas and Tassoulas (1987b), after integrating all these contributions, concluded that from the viewpoint of the horizontal dashpot it was only necessary to consider the four walls of the circumscribed rectangle rather than the walls of the actual foundation, which is much simpler. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 39 Figure 29. Horizontal radiation dashpot of embedded foundation of arbitrary shape: basic sketch (Gazetas and Tassoulas, 1987b). Figure 30 illustrates what I mean. It presents a numerical example taken from the summary paper by Gazetas (1991), where he calculates all six sets of springs and dashpots for this embedded foundation, which has a slightly irregular shape, and where the wall reaches an embedment depth of 6 m but has no contact with the soil in the top 2 m. When it comes to computing the total horizontal dashpot of this embedded foundation in the short direction y, the procedure ignores the actual foundation walls and replace them by the four walls of the circumscribed rectangle of sides 2L x 2B = 16 x 5 m. That is, the total area of contact with the soil of the two long walls of total length 4L = 32 m, is assumed to generate compression-extension waves over the height of contact of 4 m, with this contribution controlled by VLa and by the total area of contact 32 x 4 = 128 m2; while the total area of contact of the two short walls of total length 4B = 10 m, is assumed to generate shear waves, with this contribution controlled by Vs and by the total area of contact 10 x 4 = 40 m2. Then the three contributions of: base area and shear waves, area associated with 4L and compression-extension waves, and area associated with 4B and shear waves, are just added up to obtain the total radiation dashpot. Table 7 includes a partial view of the summary table for embedded foundations in Gazetas (1991) that provides clear instructions on how to compute different things. The last column of Table 7 includes the rules just described, on how to generate the horizontal dashpots cy and cx for an embedded foundation. In each case you have three term. For example, the expression for the total cy = cy, emb includes: (i) a first term labeled Cy, which is the contribution of the base, and is calculated in another table essentially as the area of the base times ρ Vs, with a slight influence of frequency; (ii) a second term, 4ρVsBd, which is the contribution of the contact area associated with the two sides of the circumscribed rectangle that are shearing the soil; and finally, (iii) a third term, 4ρVLaLd, which is the contribution of the contact area associated with the other two sides of the rectangle, which are pushing back and forth against the soil. For the dashpot in the other direction, cx, the two walls that were shearing before are now pushing and Vs is replaced by VLa, etc. Table 7 also includes the expression for the vertical radiation dashpot of the same embedded foundation. The situation for vertical is much simpler. The expression is cz,emb = Cz + ρ Vs Aw; all sidewalls are shearing the soil, and the total sidewall area Aw is the actual area of contact around the foundation, with the circumscribed rectangle playing no role in this calculation. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 40 Figure 30. Embedded foundation having an arbitrary shape and partial embedment: numerical example (Gazetas, 1991). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 41 Table 7. Partial view of summary table for embedded foundations of arbitrary shape (Gazetas, 1991). 5. EFFECT OF INTERNAL SOIL DAMPING To complete the picture, it is important to add to the viscous dashpots calculated with these Simplified Methods, the contribution due to the energy dissipated internally in the soil, mainly due to friction, which is typically characterized by a soil damping ratio, β (Fig. 31). The value of β depends on several factors, like the level of cyclic shear strain induced in the soil by the dynamic loading, the type of soil, and the Plasticity Index if the soil is a clay. Depending on the circumstances, β can be as low as 0.02 or 0.03 (that is 2 or 3%) and as high as 0.20 or 0.30 (2030%). Fortunately from the viewpoint of the Simplified Methods covered in this Lecture, once the radiation dashpot, cradiation, has been calculated at a certain frequency f, the total dashpot, ctotal, including the effect of β can be obtained using Eq. 8: 𝑘 𝑐𝑡𝑜𝑡𝑎𝑙 ≈ 𝑐𝑟𝑎𝑑𝑖𝑎𝑡𝑖𝑜𝑛 + (𝜋𝑓) 𝛽 (8) where k is the corresponding stiffness calculated at the same frequency for the elastic half-space. This simple expression for β is obtained from the Correspondence Principle of the Theory of Viscoelasticity (Bland, 1960), and it is valid for any of the six degrees of freedom (vertical, horizontal, rocking and torsional), as well as for surface and embedded foundations of any shape. 6. FINAL COMMENTS Simplified Methods will continue to play an important role in Soil Dynamics as they do in the rest of Geotechnical Engineering. While powerful computer simulations can produce more exact and detailed information, Simplified Methods are irreplaceable as a basis for codes and regulations, and as a tool to verify the computer results (“reality checks”). Furthermore, they are just better suited to many applications, where: SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 42 they allow the engineer to conduct calculations by hand or with a minimum computational effort, including parametric variations; and in the process, the engineer has the possibility to develop a feel for the physical meaning and relative importance of the various factors, with more personal control of calculations and decisions including use of engineering judgment as needed. Figure 31. Contribution of soil internal damping, β, to total dashpot (Gazetas, 1991). SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 43 It is useful for the engineer applying any of these Simplified Methods, to have at least a basic understanding of the theory and simplifications behind the procedure, which in Soil Dynamics includes some Dynamics and Wave Propagation concepts. This Carrillo Lecture was aimed at providing some of this understanding, with focus on shallow machine foundations and other dynamic soil-structure interaction applications. Many researchers have proposed useful Simplified Methods in Soil Dynamics, some of which are referenced in the paper. Methods suggested by the author are listed in Table 2, and they cover systems ranging from the free field and earth dams to shallow and deep foundations, subjected to excitations that include both seismic shaking and machine vibrations. The main focus of this Carrillo Lecture was on shallow machine foundations on a half-space subjected to dynamic loads in any of the six degrees of freedom of the foundation, and the Simplified Methods that have been proposed over the years to characterize the corresponding equivalent soil springs and dashpots. This included both frequency-dependent and frequencyindependent springs and dashpots. It started with the circular surface foundation which was studied over much of the 20th Century, until the breakthroughs by Lysmer and others in 19661971, and continued with the cases of surface and embedded foundations of arbitrary shape that culminated in the two summary publications by Gazetas in 1990 and 1991. These solutions for machine foundations are also useful for analysis of dynamic soil-structure interaction during earthquakes. The development of these simplified equivalent springs and dashpots for both surface and embedded foundations of arbitrary shape was discussed in some detail, including the contribution of the author in the early part of the process. This discussion serves to introduce some of the basic dynamic theoretical concepts behind the methods, and hopefully also as an introduction to their use in actual engineering projects. ACKNOWLEDGMENTS I am most grateful to George Gazetas for our many exhilarating discussions in the early 1980’s, about basic concepts of dynamics and wave propagation that could be used to develop Simplified Procedures for shallow and pile foundations subjected to dynamic loads. I am also grateful to several colleagues with whom I had the pleasure to develop and validate Simplified Methods on the various problems listed in Table 2: José M. Roesset, Robert V. Whitman, Issa Oweis, Alfredo Urzua, George Gazetas, Michael J. O’Rourke, Ramli Mohamad, Panos Dakoulas, Kenneth. H. Stokoe II, John L. Tassoulas, Victor Taboada and Lee Liu. Finally, I am extremely grateful to the professors that taught me Soil Mechanics and Soil Dynamics and mentored my initial research efforts: Arturo Arias at the U. of Chile, Eulalio Juárez Badillo, Alfonso Rico and Enrique Tamez at the UNAM, and Robert V. Whitman, José M. Roesset and John T. Christian at MIT. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 44 REFERENCES Ahmad, S. and Gazetas, G. (1991). Torsional Impedances of Embedded Foundations, Research Report, Department of Civil Engineering, SUNY at Buffalo. Ahmad, S. and Gazetas, G. (1992a). Torsional Stiffness of Arbitrarily-Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 118(8), 1168-1185. Ahmad, S. and Gazetas, G. (1992b). Torsional Damping of Arbitrarily-Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 118(8), 1186-1199. Arnold, R. N., Bycroft, G. N. and Warburton, G. B. (1955). Forced Vibrations of a Body on an Infinite Elastic Solid, Journal of Applied Mechanics, 77, 391-401. Barkan, D. D. (1962). Dynamics of Bases and Foundations (translated from Russian). McGrawHill Book Co., New York. Bland, D. R. (1960). The Theory of Linear Viscoelasticity, Pergamon Press, New York, NY. Boussinesq, J. (1885). Application des Potentials a L’Etude de L’Equilibre et du Mouvement des Solides Elastiques, Gauthier-Villars, Paris, France. Bycroft, G. N. (1956). Forced Vibration of a Rigid Circular Plate on a Semi-Infinite Elastic Space and an Elastic Stratum, Philosophical Transactions of the Royal Society. London, Series A 248, 327-386. Das, B. M. (1999). Principles of Foundation Engineering, 4th Edition, PWS Publishing. Day, S. M. (1977). Finite Element Analysis of Seismic Scattering Problems, Ph.D. Thesis. University of California, San Diego. Dobry, R. (1991a). Soil Properties and Earthquake Response, Invited Paper, Proceedings of X European Conference of Soil Mechanics and Foundation Engineering, Florence, Italy, May 26-30, 4, 1171-1187. Dobry, R. (1991b). Soil Properties and Earhquake Ground Response, Invited Paper, Proceedings of IX Panamerican Conference on Soil Mechanics and Foundation Engineering, 4, 15571604. Sociedad Chilena de Geotecnia, Santiago, Chile. 1994. Dobry, R. (1995). Simple Model to Evaluate Maximum Spectral Amplification of Clay Sites, Proceedings of International Symposium on Civil Engineering After 10 Years of the 1985 Earhquake in Mexico City, September 18-19, 91-98. Dobry, R. and Gazetas, G. (1985). Dynamic Stiffness and Damping of Foundations by Simple Methods, Vibration Problems in Geotechnical Engineering (G. Gazetas and E. T. Selig, eds.), ASCE, New York, NY, 77-107. Dobry, R. and Gazetas, G. (1986). Dynamic Response of Arbitrarily Shaped Foundations, Journal of Geotechnical Engineering, ASCE, 112(2), 109-135. Dobry, R. and Gazetas, G. (1988). Simple Method for Dynamic Stiffness and Damping of Floating Pile Groups, Geotechnique, 38(4), 557-574. Dobry, R. and O’Rourke, M. J. (1983). Discussion of ‘Seismic Response of End-Bearing Piles’ by R. Flores-Berrones and R. V. Whitman, Journal of Geotechnical Engineering, ASCE, 109(5), 778-781. Dobry, R., Gazetas, G. and Stokoe, K. H., II. (1986). Dynamic Response of Arbitrarily Shaped Foundations: Experimental Verifications Journal of Geotechnical Engineering, ASCE, 112(2), 136-149. Dobry, R., Mohamad, R., Dakoulas, P. and Gazetas, G. (1984). Liquefaction Evaluation of Earth Dams – A New Approach, Proceedings of 8th World Conference on Earthquake Engineering, San Francisco, CA, 3, 333-340. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 45 Dobry, R., Oweis, I. and Urzua, A. (1976). Simplified Procedures for Estimating the Fundamental Period of a Soil Profile, Bulletin of a Seismological Society of America, 66(4), 1293-1321. Dobry, R., Taboada, V. and Liu, L. (1995). Centrifuge Modeling of Liquefaction Effects During Earthquakes, Keynote Lecture Paper, Proceedings of First International Conference on Earthquake Geotechnical Engineering, (K. Ishihara, ed.), 3, 1291-1324. Dominguez, J. and Roesset, J. M. (1978). Dynamic Stiffness of Rectangular Foundations, Research Report R78-20, Department of Civil Engineering, MIT. Elorduy, J., Nieto, J. A. and Szekely, E. M. (1967). Dynamic Response of Bases of Arbitrary Shape Subjected to Periodic Vertical Loading, Proceedings of International Symposium on Wave Propagation and Dynamic Properties of Earth Materials. Albuquerque, NM, August, 105-121. Fellenius, W. (1936). Calculation of the Stability of Earth Dams, Trans. 2nd Congress on Large Dams, Washington, 4, 445. Fotopoulou, M., Kostanopoulos, P., Gazetas, G. and Tassoulas, J. L. (1989). Rocking Damping of Arbitrarily Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 115(4), 473-490. Gazetas. G. (1987). Simple Physical Methods for Foundation Impedances, Dynamic Behavior of Foundations and Buried Structures, Elsevier Applied Science, London, England, 45-93. Gazetas, G. (1990). Chapter 15: Foundation Vibrations, Foundation Engineering Handbook, 2nd Edition, (Hsai-Yang Fang, ed.), Chapman & Hall Publishing, New York, NY. Gazetas, G. (1991). Formulas and Charts for Impedances of Surface and Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 117(9), 1363-1381. Gazetas, G. and Dobry, R. (1984). Horizontal Response of Piles in Layered Soils, Journal of Geotechnical Engineering, ASCE, 110(1), 20-40. Gazetas, G. and Roesset, J. M. (1976). Forced Vibrations of Strip Footings on Layered Soils, Methods of Structural Analysis, ASCE, 1, 115-131. Gazetas, G. and Roesset, J. M. (1979). Vertical Vibrations of Machine Foundations, Journal of the Geotechnical Engineering Division, ASCE, 105(GT12), 1435-1454. Gazetas. G. and Tassoulas, J. L. (1987a). Horizontal Stiffness of Arbitrarily Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 113(5), 440-457. Gazetas. G. and Tassoulas, J. L. (1987b). Horizontal Damping of Arbitrarily Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 113(5), 458-475. Gazetas, G. and Stokoe, K. H., II. (1991). Vibration of Embedded Foundations: Theory Versus Experiment, Journal of Geotechnical Engineering, ASCE, 117(9), 1382-1401. Gazetas. G., Dobry, R. and Tassoulas, J. L. (1985a). Vertical Response of Arbitrarily Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 111(6), 750-771. Gazetas, G., Tassoulas, J. L., Dobry, R. and O’Rourke, M. J. (1985b). Elastic Settlement of Arbitrarily Shaped Foundations Embedded in Half Space, Geotechnique, XXXV(3), September, 339-346. Gladwell, G. M. L. (1968). Forced Tangential and Rotatory Vibration of a Rigid Circular Disc on a Semi-Infinite Solid, International Journal of Engineering Science, 6(10), October, 591-607. Hall, J. R., Jr. (1967). Coupled Rocking and Sliding Oscillations of Rigid Circular Footings, Proceedings of International Symposium on Wave Propagation and Dynamic Properties of Earth Materials, Albuquerque, NM, August, 139-160. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. XXVI RNMSeIG, Cancún, Quintana Roo, 14-16 noviembre 2012 46 Hatzikonstantinou, E., Tassoulas, J. L., Gazetas, G., Kotsanopoulos, P. and Fotopoulou, M. (1989). Rocking Stiffness of Arbitrarily Shaped Embedded Foundations, Journal of Geotechnical Engineering, ASCE, 115(4), 457-472. Hsieh, T. K. (1962). Foundation Vibrations, Proceedings Institution of Civil Engineers, London, U.K., 22, 211-226. Johnson, G. R., Christiano, P. and Epstein, H. I. (1975). Stiffness Coefficients for Embedded Footings, Journal of the Geotechnical Engineering Division, ASCE, 101(GT8), 789-800. Kausel, E. and Roesset. J. M. (1975). Dynamic Stiffness of Circular Foundations, Journal of Engineering Mechanics Division, ASCE, 101(6), 771-785. Lamb, H. (1904). On the Propagation of Tremors Over the Surface of an Elastic Solid, Philosophical Transactions of the Royal Society, London, U.K., Series A, 203, 1-42. Lambe, T. W. and Whitman, R. V. (1969). Soil Mechanics, John-Wiley and Sons, New York. Liu, C. and Evett, J. B. (1998). Soils and Foundations, 4th Edition, Prentice Hall, New Jersey. Luco, J. E. and Westmann, R. A. (1971). Dynamic Response of Circular Footings, Journal of Engineering Mechanics Division, ASCE, 97, 1381-1395. Lysmer. J. and Richart. F. E., Jr. (1966). Dynamic Response of Footings to Vertical Loading, Journal of the Soil Mechanics and Foundations Division, ASCE, 92(1), 65-91. Massa, F. (1972). Radiation of Sound, American Institute of Physics Handbook, Third Edition, McGraw-Hill Book Co., New York, 3-139. Meyerhof, G. G. (1955). Influence of Roughness Base and Groundwater Conditions on the Ultimate Bearing Capacity of Foundations, Geotechnique, 5, 227-242. Morse, P. M. and Ingard, K. U. (1968). Theoretical Acoustics, McGraw-Hill Book Co, New York. Newmark, N. M. (1942). Influence Charts for Computation of Stresses in Elastic Foundations, Bulletin No. 338, University of Illinois. Novak, M. (1970). Prediction of Footing Vibrations, Journal of Soil Mechanics and Foundations Division, ASCE, 96(3), 837-861. Prandtl, L. (1920). Über Die Härte Plastischen Korper, Nachr. kgl. Ges. Wiss. Göttingen, Math. phys. Klasse. Quinlan, P. M. (1953). The Elastic Theory of Soil Dynamics, Symposium on Dynamic Testing of Soils, ASTM STP No. 156, 3-34. Reissner, E. (1936). Stationäre, Axialsymmetrischei Durch Eine Schüttelnde Masse Erregte Schwingungen Eines Homogenen Elastischen Halbraumes, Ingenieur-Archiv, 7(6), Berlin, Germany, 381-396. Reissner, E. and Sagoci, H. F. (1944). Forced Torsional Oscillations of an Elastic Half-Space, Journal of Applied Physics, 15, 652-662. Reissner, H. (1924). Zum Erddruckproblem, Proceedings of the 1st International Congress of Applied Mechanics, Delft, Holland. Richart, F. E. and Whitman, R. V. (1967). Comparison of Footing Vibration Tests With Theory, Journal of the Soil Mechanics and Foundations Division, ASCE, 93(6), 143-168. Richart, F. E., Hall, J. R. and Wood, R. D. (1970). Vibrations of Soils and Foundations, Prentice Hall, Englewood Cliffs, NJ. Roesset, J. M. (1980). Stiffness and Damping Coefficients in Foundations, Dynamic Response of Pile Foundations, (M. O’Neill and R. Dobry, eds.), ASCE, New York, NY, 1-30. Roesset, J. M. and Whitman, R. V. (1969). Theoretical Background for Amplification Studies, Research Report R69-15, Soils Publication 231, Inter-American Program, Dept. of Civil Engineering, MIT, March. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C. Simplified methods in Soil Dynamics Dr. Ricardo Dobry XXI Nabor Carrillo Lecture 47 Roesset, J. M., Whitman, R. V. and Dobry, R. (1973). Modal Analysis for Structures with Foundation Interaction, Journal of Structural Division, ASCE, 99(ST3), 399-416. Romo, M. P. and Seed, H. B. (1987). Analytical Modeling of Dynamic Soil Response in the Mexico Earthquake of September 19, 1985, Proceedings of the International Conference on the Mexico Earthquakes-1985, ASCE, Mexico City, Mexico, 148-162. Santoyo, E. (2010). Exploración de Suelos: Métodos Directos e Indirectos, Muestreo y Pruebas de Campo, Vigésima Conferencia Nabor Carrillo, XXV Reunión Nacional de la Sociedad Mexicana de Ingeniería Geotécnica, Acapulco, Mexico. Schmertmann, J. H. and Hartman, J. P. (1978). Improved Strain Influence Factor Diagrams, Journal of the Geotechnical Engineering Division, ASCE, 104(GT8), 1131-1135. Seed, H. B. (1987). Influence of Local Soil Conditions on Ground Motions and Building Damage During Earthquakes, Eighth Nabor Carrillo Lecture, VIII National Meeting of the Mexican Society for Soil Mechanics, Sinaloa, Mexico. Sung, T. Y. (1953). Vibrations in Semi-Infinite Solids due to Periodic Surface Loadings, Symposium on Dynamic Testing of Soils, ASTM STP No. 156, 35-64. Tamez, E. (1992). Differential Settlements of Colonial Buildings in Mexico City Historic Center, Eleventh Nabor Carrillo Lecture, 16th National Meeting of the Mexican Society for Soil Mechanics, Zacatecas, Mexico. Terzaghi, K. (1943). Theoretical Soil Mechanics, John Wiley and Sons, Inc., New York. Veletsos, A. S. and Wei, Y. T. (1971). Lateral and Rocking Vibrations of Footings, Journal of the Soil Mechanics and Foundations Division, ASCE, 97, 1227-1248. Whitman, R. V. (2000). Fifty Years of Soil Dynamics, Fifteenth Nabor Carrillo Lecture, 20th National Meeting of Soil Mechanics, Oaxaca, Mexico. Whitman, R. V. and Richart. F. E., Jr. (1967). Design Procedures for Dynamically Loaded Foundations, Journal of Engineering Mechanics Division, ASCE, 93(6), 169-193. Wong, H. L. and Luco, J. E. (1976). Dynamic Response of Rigid Foundations of Arbitrary Shape, Earthquake Engineering and Structural Dynamics, 4, 579-587. Wong, H. L. and Luco, J. E. (1978). Tables of Impedance Functions and Input Motions for Rectangular Foundations, Report No. CE 78-15, University of Southern California, Los Angeles. SOCIEDAD MEXICANA DE INGENIERÍA GEOTÉCNICA A.C.