Electronic Supplementary Material Method details CPOD
advertisement

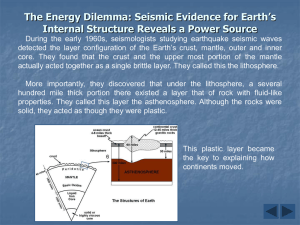
Electronic Supplementary Material Method details CPOD deployments CPODs were originally deployed at 70 sites across the Moray Firth in 2011. Only a subset of these units was recovered and correctly recorded acoustic detections. In order to replicate the B-A-C-I analysis carried out by [1], we focused on data from the same 20 CPODs that were used in that study. We then restricted the analysis of the relationship between buzz occurrence and distance from the source vessel to a region ~25 km around the surveyed area, since we were interested in investigating the variation in foraging activity within the distance range that previous work had shown an effect on porpoise patterns of presence. Confounding sources of variability would also occur beyond this range (e.g. marked habitat differences). This led us to exclude data from the control block, but include data from two additional PODs adjacent to the impact block (Fig. 1 in the paper). CPOD units were randomly assigned to specific sites, deployed simultaneously and not swapped during the sampling period, such that data from each site were collected using the same device both before and during the seismic survey. Furthermore, because the seismic vessel was constantly moving, each CPOD collected data at a broad range of distances from the noise source. This avoided the issue associated with some studies of fixed noise sources where variation in CPOD sensitivity could confound analysis of variation in detections along a gradient of noise exposure. All the units used for this study were v.1 CPODs. It is known that, despite factory calibration, the sensitivity of different CPOD units may differ. However, even if devices are perfectly calibrated in the laboratory prior to each deployment (see [2]), differences in, for example, water depth and mooring configuration could mean that detection distances vary between sampling sites. Our analysis was designed to account for the fact that different units, or different local conditions, could affect the sensitivity of CPODs deployed at different sites: 1) we considered the relative occurrence of buzzes when clicks were present, rather than focusing on absolute numbers of clicks. A device’s sensitivity would therefore have to be different for buzzes and regular clicks for it to have affected the results. 2) CPODs were randomly assigned to single deployment sites, such that a gradient in sensitivity that matched the distance from the seismic vessel was unlikely. 3) Deployment location was included as a random effect in the mixed-effects model. Any variability in device sensitivity was thus accounted for through modelling because empirical unit calibration would only have accounted for part of the variability between devices deployed at different sites. 1 Click extraction and classification Downloaded CPOD data were processed to identify porpoise clicks using the click-train classifier within version 2.030 of the dedicated CPOD analysis software. The software classifies clicks based on the likelihood of them being generated by cetaceans (‘CetHi’, ‘CetMod’, ‘CetLow’). Only CetHi and CetMod clicks were included in analyses. We exported the time series of porpoise clicks and calculated the inter-click intervals (ICIs), i.e. the time elapsed between consecutive clicks. The distribution of ICIs was multimodal, suggesting that several processes could be identified in the ICI time series. While previous studies have used an ICI threshold of 10 ms to classify buzzes, we followed the quantitative classification approach described by [3]. We fitted Gaussian mixture models to the time series of ICIs to characterize the mixture distribution. We normalized the data by natural log-transforming the ICIs. Because of the large size of the dataset, the analysis was conducted on each CPOD file separately. We fitted the models via an expectation maximization (EM) algorithm using package mixtools within the statistical software R. We specified the initial number of component distributions of the mixture model to be equal to three, corresponding to buzz ICIs, regular ICIs and the inter-train intervals (i.e. the longer pauses between click trains). When the proportion of buzz ICIs to regular ICIs was low, the model estimated two of the components within the regular ICI range. On these occasions, we specified four components and used the Akaike Information Criterion (AIC) to confirm that this model better fitted the data. The estimated component distributions of a mixture model with three and four components are exemplified in Fig. A1. These component distributions were then used to determine which ICIs were buzzes. The distribution used to classify buzz ICIs was centred on average on 3 ms (SD = 1 ms). We verified that the model was correctly identifying the buzzes by randomly selecting 10 hourly samples in which the estimated proportion of buzzes was greater than 0.3. We visually scanned the output of the click-train classifier within version 2.030 of the dedicated CPOD analysis software to check that the ICIs classified as buzzes by the mixture model could be recognised as such in the time series of detected clicks. Two examples of the patterns corresponding to buzzes are presented (at different temporal scales) in Fig. A2. In all random samples, the high proportion of buzz ICIs in that hour was confirmed. 2 Figure A1. Results of the Gaussian mixture model for two inter-click interval (ICI) time series. In a), the model was fitted with three component distributions. The first component (from the left) corresponds to the buzz ICIs, the second to the regular ICIs, and the third to the inter-train intervals. In b), the model was fitted with four component distributions, because of the large proportion of regular ICIs. The first component (from the left) corresponds to the buzz ICIs, the second and third to the regular ICIs, and the fourth to the inter-train intervals. The values on the x-axis are the natural logarithm of the ICIs in minutes. 3 Figure A2. Two examples of buzzes as visualised in CPOD analysis software, at two different temporal scales. a) Coarser temporal resolution. Every tick mark represents 50 ms. b) Finer temporal resolution. Every tick mark represent 10 ms. In both cases, the average ICI is approximately 2 ms. Assessing variation in probability of buzzing in relation to distance from the seismic vessel A binary Generalized Linear Model was fitted using Generalized Estimating Equations (GEE-GLM) to account for temporal autocorrelation. An appropriate correlation structure was selected using the quasi-likelihood under the independence model criterion (QIC). When assessing the effect of distance from the source vessel on the occurrence of buzz ICI, the QIC selected an AR1 correlation structure for the residuals, suggesting that autocorrelation declined over time. One potential issue when using CPODs is that high levels of background noise, such as the seismic vessel, could affect the CPODs’ ability to detect clicks. This could occur in two ways. First, the CPOD can only record up to a maximum of 4096 clicks in each one minute period. At high levels of background noise, the buffer may therefore become full early in the one minute sampling period, and 4 fail to record additional clicks until the buffer is re-set at the end of that minute. Second, high levels of background noise could potentially mask some click detections. Raw CPOD data were therefore explored to ensure that this issue did not influence our results. First, for all CPODs within the impact area, we examined the number of one minute samples in which the buffer was filled during the seismic survey period. Whilst the buffer did fill on some occasions, this was in less than <0.5 % of the sampling period (813 minutes out of a total of 187,200). Second, we reviewed raw data on the sound pressure levels recorded through the close passes of the seismic vessel to CPOD sites. As illustrated in Fig. A3, the presence of the background vessel noise and periodic seismic pulses dominate recordings when the vessel was within 0.5 km, and filled the buffer at distances of ca. < 0.5 km, but were barely evident beyond 1 km. Thus, any effects of vessel noise on CPOD recordings are only likely to occur very locally. Given the broad scale of both the seismic survey and our CPOD array, such events were rare, such that the vessel occurred within 1 km of a CPOD for only 0.5% of the samples used “during” the seismic survey in our B-A-C-I analysis (Fig 2a). In addition, we repeated the analysis of the effect of distance from the source vessel on the occurrence of buzz ICI, excluding all sampling periods when the vessel was within 2 km of a CPOD, to ensure that these occasions did not overly influence the relationship in Fig 2b. The model results were unchanged by excluding these data. 5 Figure A3. Examples of the sound pressure levels recorded as the seismic vessel passed within a) 25 m, b) 525 m, c) 1042 m and d) 1478 m of the CPOD, visualised in the CPOD analysis software. Tick marks represent 10 s. 6 Noise measurements Recordings of the seismic noise were made between 1st and 5th September 2011, at a series of 15 sites between 1.6 km and 61.8 km from the survey vessel. Water depths were < 50 m, and measurements were carried out at a depth of 10 m. The same vessel was used for all recordings, so recordings could not be fully standardised for source or environmental conditions (e.g. Sea state, bathymetric profile) between the recording vessel and the seismic source. A RESON TC-4032 hydrophone, a RESON VP2000 conditioning amplifier and a National Instruments NI USB-6251 16-bit analogue to digital convertor were used for the measurements. The signal was sampled continuously at 500,000 samples per second. Details of the equipment frequency response and calibration are provided by [1]. An estimate of peak-to-peak sound pressure level (SPL) at 1 m from source was derived from far-field recordings made on 4th September as the seismic vessel passed within approximately 1660 m of the recording vessel. We considered the centre of the array as a point source 73 m behind the stern of the vessel, at a depth of 6 m, and estimated source levels by back calculating using a combination of parabolic (http://cmst.curtin.edu.au/products/actoolbox.cfm/) and ray trace (http://oalib.hlsresearch.com/Rays/) models for low and high frequency components respectively. Peak-to-peak source levels were estimated to be 242 –253 dB re 1 μPa at 1 m. Recordings of received levels at different distances from source typically indicated that > 95% of the energy was below 400 Hz. This is illustrated in Figure A4, using the frequency spectra of measurements made at the closest recording distance (1.6 km). Figure A4. Frequency spectra of a seismic pulse recorded at the closest sampling site to seismic vessel, 1.6 km from source. 7 Bootstrapping procedure for testing relationships between probability of buzzing and estimated noise levels Calibrated noise measurements at varying distance from the seismic survey vessel were not taken at each CPOD site. Moreover, such measurements corresponded to several minutes of recording, while both the recording and seismic boats were moving. Therefore, we needed to estimate the relationship between received noise levels and distance, and then use the distance of each CPOD site to provide an estimate of received noise level during each minute. We used the following bootstrapping approach to test whether there was a relationship between buzz occurrence (as detected from CPOD data) and estimated noise levels at the corresponding CPOD location. We first constructed 1000 resamples of the noise measurements dataset, randomly sampling with replacement from the data. For each resample we estimated the relationship between SEL and the log-transformed distance from the sound source, using a Gaussian GEE-GLM to account for autocorrelation between residuals from the same noise measurement location. We then used the estimated relationship between received levels and distance to estimate the received noise levels at the CPOD locations, given their distance from the vessel in that minute. Finally, we tested the presence of buzz ICIs in each minute that contained at least one ICI as a function of estimated noise levels, fitting a binary GEE-GLM as described above. Bootstrapped coefficients from the GEE-GLM were used to plot the estimated relationship with associated uncertainty. R packages used for the statistical analysis Mixture models: mixtools. Benaglia, T., Chauveau, D., Hunter, D. R., Young, D. 2009 mixtools: An R Package for Analyzing Finite Mixture Models. Journal of Statistical Software 32, 1–29. Mixed-effects models: lme4. Bates, D., Maechler, M., Bolker, B. 2013 lme4: Linear mixed-effects models using S4 classes. R package version 0.999999-2. URL: http://CRAN.Rproject.org/package=lme4. Generalized linear models with Generalized Estimating Equations: geepack. Højsgaard, S., Halekoh, U., Yan J. 2006 The R Package geepack for Generalized Estimating Equations. Journal of Statistical Software 15, 1–11. 8 References 1. Thompson, P. M., Brookes, K. L., Graham, I. M., Barton, T. R., Needham, K., Bradbury, G. & Merchant, N. D. 2013 Short-term disturbance by a commercial 2-D seismic survey does not lead to long-term displacement of harbour porpoises. P. Roy. Soc. Lond. B Bio. 280. (doi:10.1098/rspb.2013.2001) 2. Dähne, M., Verfuß, U. K., Brandecker, A., Siebert, U. & Benke, H. 2013 Methodology and results of calibration of tonal click detectors for small odontocetes (CPODs). J. Acoust. Soc. Am. 134, 2514–2522. (doi:10.1121/1.4816578) 3. Pirotta, E., Thompson, P. M., Miller, P. I., Brookes, K. L., Cheney, B., Barton, T. R., Graham, I. M. & Lusseau, D. 2014 Scale-dependent foraging ecology of a marine top predator modelled using passive acoustic data. Funct. Ecol. 28, 206–217. (doi:10.1111/1365-2435.12146) 9