3.1 Linear systems and Linearity principles
advertisement

MA282 - DE
3.1 Linear systems and Linearity principles
* Linear systems and 2nd order linear equations are most important in this course.
Review
(1) Linear system with two dependent variables
𝑑𝑥
= 𝑎𝑥 + 𝑏𝑦
𝑑𝑡
{
𝑑𝑦
= 𝑐𝑥 + 𝑑𝑦
𝑑𝑡
where 𝑎, 𝑏, 𝑐, 𝑑 are constants.
In vector notaion,
𝑑𝑌
= 𝐹(𝑌)
𝑑𝑡
where 𝑌 = (𝑥, 𝑦).
(2) 2nd order homogeneous linear equation
𝑑2𝑦
𝑑𝑦
+
𝑝
+ 𝑞𝑦 = 0
𝑑𝑡 2
𝑑𝑡
It can be converted into a linear system:
𝑑𝑦
=𝑣
{ 𝑑𝑡
𝑑𝑣
= −𝑝𝑣 − 𝑞𝑦
𝑑𝑡
Matrix notation for linear systems
𝑑𝑥
= 𝑎𝑥 + 𝑏
{ 𝑑𝑡
𝑑𝑦
= 𝑐𝑥 + 𝑑𝑦
𝑑𝑡
Let 𝐴 = (
𝑎
𝑐
𝑥
𝑏
) and 𝑌 = (𝑦); then we can rewrite as
𝑑
𝑑𝑥
𝑎
( 𝑑𝑡 ) = (
𝑑𝑦
𝑐
𝑑𝑡
1
𝑏 𝑥
)( )
𝑑 𝑦
Or more compactly as
𝑑𝑌
= 𝐴𝑌
𝑑𝑡
where 𝐴 is called the coefficient matrix.
Example 1. Partially decoupled system
𝑑𝑥
= −𝑥 + 2𝑦
𝑑𝑡
{
𝑑𝑦
=𝑦
𝑑𝑡
The general solution is
{
𝑥(𝑡) = 𝑦0 𝑒 𝑡 + (𝑥0 − 𝑦0 )𝑒 −𝑡
𝑦(𝑡) = 𝑦0 𝑒 𝑡
where (𝑥(0), 𝑦(0)) = (𝑥0 , 𝑦0 ).
Written in vector notation, the general solution is
𝑦0
𝑥 − 𝑦0
𝑌(𝑡) = 𝑒 𝑡 (𝑦 ) + 𝑒 −𝑡 ( 0
)
0
0
Example 2. Damped harmonic oscillator
𝑑2𝑦
𝑑𝑦
+
3
+ 2𝑦 = 0
𝑑𝑡 2
𝑑𝑡
The equivalent system is
𝑑𝑦
=𝑣
{ 𝑑𝑡
𝑑𝑣
= −3𝑣 − 2𝑦
𝑑𝑡
We used the guessing technique to find solutions 𝑦1 (𝑡) = 𝑒 −2𝑡 and 𝑦2 (𝑡) = 𝑒 −𝑡 . (The
characteristic equation is 𝑠 2 + 3𝑠 + 2 = 0. ) In vector notation,
−2𝑡
1
𝑌1 (𝑡) = ( 𝑒 −2𝑡 ) = 𝑒 −2𝑡 ( )
−2
−2𝑒
−𝑡
1
𝑌2 (𝑡) = ( 𝑒 −𝑡 ) = 𝑒 −𝑡 ( )
−1
−𝑒
2
Given a linear system
𝑑𝑌
𝑑𝑡
= 𝐴𝑌, how do we calculate the vector field at any given point 𝑌0 ?
We do matrix multiplication
𝑏 𝑥0
)( )
𝑑 𝑦0
𝑎
𝑐
𝐴𝑌0 = (
Example
𝑑𝑥
=𝑦
{ 𝑑𝑡
𝑑𝑦
= −𝑥
𝑑𝑡
𝑑𝑥
0 1 𝑥
⇔ ( 𝑑𝑡 ) = (
)( )
𝑑𝑦
−1 0 𝑦
𝑑𝑡
The matrix notation is useful for a large number of dependent variables.
How do we calculate the equilibrium points of
𝑑𝑌
𝑑𝑡
= 𝐴𝑌?
Need to solve
𝐴𝑌 = 𝑂 ⇔ (
𝑎
𝑐
𝑎𝑥 + 𝑏𝑦 = 0 − − − 𝑒𝑞1
0
𝑏 𝑥
) (𝑦) = ( ) ⇔
𝑐𝑥 + 𝑑𝑦 = 0 − − − 𝑒𝑞2
0
𝑑
Clearly, (0, 0) is a solution, so an equilibrium point. This solution is called the trivial
solution.
To find other equilibrium points, from eq1, if 𝑎 ≠ 0,
𝑏
𝑥=− 𝑦
𝑎
Substitute this for 𝑥 in eq2,
𝑏
𝑐 (− 𝑦) + 𝑏𝑦 = 0
𝑎
which is equivalent to
(𝑎𝑑 − 𝑏𝑐)𝑦 = 0
Hence either 𝑎𝑑 − 𝑏𝑐 = 0 or 𝑦 = 0.
If 𝑦 = 0 then 𝑥 = 0, again we have the trivial solution. Therefore, a linear system has
nontrivial equilibrium points only if 𝑎𝑑 − 𝑏𝑐 = 0.
3
This quantity 𝑎𝑑 − 𝑏𝑐 is the determinant of the coefficient matrix 𝐴, denoted det𝑨 or |𝑨|
Theorem The origin is always an equilibrium point of a linear system. It is only equilibrium
point if an only det𝐴 ≠ 0.
Linearity Priniciple
Return to Example 1. Partially decoupled system. In matrix notation,
𝑑𝑌
−1
=(
0
𝑑𝑡
2
)𝑌
1
Consider three different initial conditions
1
1
2
𝑌1 (0) = ( ), 𝑌2 (0) = ( ), 𝑌3 (0) = ( )
0
1
1
They corresponds to the three solutions
𝑡
−𝑡
1
1
𝑌1 (𝑡) = 𝑒 −𝑡 ( ), 𝑌2 (𝑡) = 𝑒 𝑡 ( ), 𝑌3 (𝑡) = (𝑒 +𝑡𝑒 )
0
1
𝑒
since
{
𝑦0
𝑥(𝑡) = 𝑦0 𝑒 𝑡 + (𝑥0 − 𝑦0 )𝑒 −𝑡
𝑥 − 𝑦0
⇔ 𝑌(𝑡) = 𝑒 𝑡 (𝑦 ) + 𝑒 −𝑡 ( 0
)
𝑡
0
0
𝑦(𝑡) = 𝑦0 𝑒
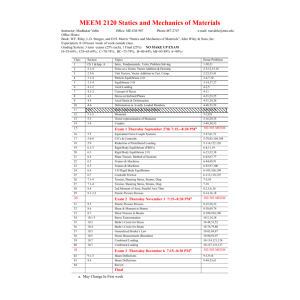
Graphs:
How are these 3 solutions related?
𝑌3 (𝑡) = 𝑌1 (𝑡) + 𝑌2 (𝑡)
4
Theorem (Linearity Principle) Suppose that
𝑑𝑌
= 𝐴𝑌
𝑑𝑡
is a linear system of differential equations.
1. If 𝑌(𝑡) is a solution and k is a constant, then 𝑘𝑌(𝑡) is also a solution.
2. If 𝑌1 (𝑡), 𝑌2 (𝑡) are 2 solutions, then 𝑌1 (𝑡) + 𝑌2 (𝑡) is also a solution.
Therefore the linear combination of 𝑌1 (𝑡) and 𝑌2 (𝑡), i.e., 𝑘1 𝑌1 (𝑡) + 𝑘2 𝑌2 (𝑡) is a solution of a
linear system.
Example Solve
𝑑𝑌
−1
=(
0
𝑑𝑡
2
) 𝑌,
1
−1
)
−2
𝑌(0) = (
Note 𝑌(𝑡) = 𝑘1 𝑌1 (𝑡) + 𝑘2 𝑌2 (𝑡) is the solution. Now we can find
1
−1
1
( ) = 𝑌(0) = 𝑘1 𝑌1 (0) + 𝑘2 𝑌2 (0) = 𝑘1 ( ) + 𝑘2 ( )
0
−2
1
𝑘 + 𝑘2
=( 1
)
𝑘2
⇒ 𝑘2 = −2, 𝑘1 = 1
So the solution to IVP is
−𝑡
𝑡
−𝑡
𝑡
𝑌(𝑡) = (𝑒 ) − 2 (𝑒 𝑡 ) = (𝑒 − 2𝑒
𝑡 )
0
𝑒
−2𝑒
Question For an arbitrary linear system
every IVP?
𝑑𝑌
𝑑𝑡
= 𝐴𝑌, how many solutions do we need to solve
Answer 2
Definition Two solutions 𝑌1 (𝑡), 𝑌2 (𝑡) of a linear system for which 𝑌1 (0), 𝑌2 (0) are linearly
independent are called linearly independent solutions of the linear system.
1
1
Here, 𝑌1 (0) = ( )and 𝑌2 (𝑡) = ( ) are linearly independent
0
1
⇔ (1, 0) and (1, 1) do not lie on the same line through the origin.
5