Design of a Nano-vibration System for Nanomanufacturing
advertisement

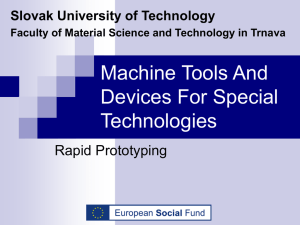
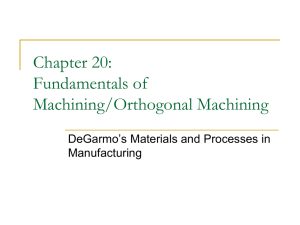
Design of a Nano-vibration System for Nanomanufacturing Lauren Blake Micro and Nano Manufacturing Lab Dr. Murali Sundaram Mechanical Engineering WISE Program August 17, 2012 Design of a Nano-vibration System for Nanomanufacturing Lauren Blake School of Dynamic Systems, University of Cincinnati, Cincinnati, Ohio 45221, USA Table of Contents Abstract ........................................................................................................................................... 1 Acknowledgements ......................................................................................................................... 1 Introduction/Background ................................................................................................................ 2 Research Methods ........................................................................................................................... 5 Results and Discussion ................................................................................................................... 6 Conclusion ...................................................................................................................................... 7 References ....................................................................................................................................... 8 Abstract Nano machining is the modification of material features ranging from 1-1000 nanometers. One of the ways in which to make these modifications is to vibrate a small cutting tool or the workpiece under an Atomic Force Microscope (AFM). However, a probe on an AFM is fragile and expensive so lessening tool wear is necessary in order to be cost-efficient. Our hypothesis is that non-contact vibration processes can accomplish this goal and we are therefore designing a nano vibration system that will more accurately set a constant machining gap required for the vibration assisted nanomachining. This is done by studying the amplitude of the piezo transducer vibrations, using a laser vibrometer, and then establishing a calibration curve that can be used to expand the piezo until it reaches a cutting tool, and then contract the piezo back to a zero point, so that with a known voltage the machining gap can be calculated. It was found from the experimental calibration curve values that a transducer expands at a linear rate and that as the workpiece mass increases on a transducer, the amplitude of the vibration exponentially decays. Acknowledgements This research project is supported by the National Science Foundation under Grant Nos. CMMI 1137968 and CMMI 1120382. Other contributions were Dr. Murali Sundaram, Sagil James, and Abishek Balsamy Kamaraj. Help from the WISE Program administrator, Dr. Urmila Ghia, is also 1 much appreciated. The research facilities provided by the University of Cincinnati are acknowledged as well. The WISE Program has positively changed my future. Through the program I have gained experience with a male-dominated lab environment, Masters and PhD students, and a lab research experience as a whole. I have learned how to answer my own questions because research is not like course work in that a professor can explain every problem because all the problems have been done before. Because of the WISE program, I have affirmed my decision to pursue a Masters Degree in Mechanical Engineering after I get my Bachelors Degree in Biomedical Engineering and I can therefore focus my energy for the next four years into this goal. The lasting relationship that I will now have with my mentor Dr. Sundaram will make my pursuit of obtaining my Masters degree entirely possible. I will also have the opportunity to present my work at a conference and be a co-author on a published journal or conference paper. Not only will these opportunities simply build my resume but they open doors to the professional world in which innovation is based on sharing and presenting your findings to other scientists and engineers. The experience that I have received with different mechanical engineering software and machines has improved my ability to problem solve and increase the slope of my learning curve, as learning new technologies forces one’s brain to work in more creative, independent ways. Introduction/Background Nanomanufacturing is a prerequisite to unveil the full potential of nanotechnology. Efficient nanomachining practices must be developed to save manufacturing facilities time and money. The ability to set a nano-sized gap between a cutting tool and a workpiece, as intended in this research, is important for lessening tool wear and preventing tool breakage while machining a nano sized hole. It is found that vibration assisted non-contact machining in which the probe vibrates against nanoparticles and occur at a distance from the workpiece can help to lessen tool wear and increase tool life. Included is some background research regarding vibrating a cutting tool, vibrating a workpiece, and nanopositioning using piezoactuators that can help set a machining gap in order to create a distance between the tool probe and the workpiece. Vibration of a cutting tool is a common procedure to machining nano features such as holes, grooves, and scratches. [1]. It is done using the AFM and vibrating the cutting tool itself. This usually occurs while the AFM is in tapping mode. However, this can take a long time, and may often result in high tool wear because the cantilever is pushing, pulling, cutting, or indenting into the workpiece at a less controllable rate. Some findings were that combined first and second order sliding mode achieved robust chattering-free vibration control of AFM tip. The force between the tip and the surface is an important factor that determines the success of the machining process. The tip is modeled as a driving oscillator with damping and is effected by the tip radius (which needs to be small or else it will lead to machining error and failure of the nanomachining process). These experiments showed that a sharper tip and harder cantilever 2 optimized the machining process. The larger the Young’s modulus, the smaller the machining depth and the larger the tapping force necessary [2]. Workpiece vibration, although not very popular at this current time, is being considered by a few lab groups, to see if it optimizes the machining process. Masazuwa and Egashira were one of the first to research the possibilities of vibrating the workpiece instead of the tool to make a cut [3]. Their method is called microultrasonic machining (MUSM). They found improvements in machinable hole size and the ability to machine smaller holes. The machining rates of the materials increase when the vibration amplitude or machining load increases. This method is similar to micro-EDM machines which allow high-precision tool rotation by a spindle mechanism. Masazuwa succeeded in machining microholes of 20 micrometers on silicon, however, the rotation of the tool was very eccentric and therefore the machined holes lacked roundness, thus disallowing for the technique to be used to make smaller microholes (or nanoholes). Micro-EDM involving workpiece vibration has typically had better results including improvement in machining accuracy on the micro scale. The workpiece vibration in EDM allows for the machining of smaller-than-usual microshapes with greater material removal rate (MRR), lessened tool wear, and less surface roughness [3, 4]. Dr. Murali Sundaram et al. (2007) performed experiments on ultrasonic assisted micro electro discharge machining, using ultrasonic vibration to the workpiece [5]. Since this was a microEDM process, material removal was based on the thermoelectric energy that existed between the workpiece and some kind of electrode within a dielectric fluid. Some important performance measures in micro EDM are the material removal rate and tool wear, which help to determine the rate of production. The work piece was ultrasonically vibrated using a piezo-electric transducer of 40 kHz frequency and 10 micrometers maximum amplitude of vibration in the z-axis. They used a variable transformer to vary the power input to the generator to control the amplitude. The process parameters that are used to select the best conditions for stability were capacitance, percent of peak power used for ultrasonic vibration, feed rate, and machining time. In another study by Li Zhang et al., the workpiece was vibrated in the x, y, and z direction [6]. The resulting ultrasonic force from the sample is utilized to regulate the machining depth. They have found that the cantilever begins to indent into the sample only when the frequency of the cantilever is significantly lesser than the frequency of the probe. At low frequencies on the sample, the cantilever follows the sample vibration. However, when the vibration frequency is much greater than the resonant frequency of the cantilever, the cantilever cannot follow the sample vibration due to its inertia, so the tip can enter the sample surface. The set up for enacting vibrations on the x, y, and z axes included a high frequency circular motion of the tip in the x-y plane added to achieve better control and to overcome the limitations of mechanical scratching (which results in high tool wear and slow machining speed) [6]. Two piezoelectric actuators provide the circular motion, in the horizontal and vertical directions. There were xyz nanopositioners which served as nano-vibrators. The z-piezo and sample are on top of a pillar, which converts x-y piezo motions into circular motion. The z-vibration amplitude 3 and hole depth had a linear trend. The amplitude that was used was 110 nanometers and the frequency used was 16,400 Hz. Nanopositioning is very important in nanomachining because one needs to be able to machine in the desired spot of the manufacturer using a method that is repeatable and accurate. Because piezoelectric transducers expand at known levels with known voltages, piezo actuators can be used to position a workpiece sample on the x, y, and z axis, using piezoelectric transducers. A piezoelectric translator can be simplified into a basic spring/mass system, which is controlled by a piezoelectric force. One of the control mechanisms is known as piezo-electric-mechanical actuation, and one study utilizes a piezoelectric actuator to provide adaptive clamping forces [7]. The main findings of this specific study were that position feedback can be used to minimize unwanted displacement of the workpiece. Force feedback control is stable but has a lower bandwidth than position feedback control. This experiment also determined that piezoelectric materials should be placed directly on the part, since piezoelectric materials are very stiff and the clamper material between the part and the piezo actuator would hinder movement. Positioning on the vertical axis is an important aspect of positioning. In an experiment at the Hong Kong University of Science and Technology [8], high frequency signals were used in order to achieve active control of the process. A separate piezoelectric actuator will be required to support the workpiece in order to have small, quick control actions. To attain accurate resolution, static and dynamic stiffness, and dynamic response, workpiece micro-positioning tables using PZT are used as a “feed mechanism.” To improve the high speed positioning accuracy on the vertical axis, a workpiece micro-positioning table was developed, with a piezoelectric translator at the center, producing a displacement of up to 48 micrometers, using a pushing force of up to 1000N. Due to the effect of spring stiffness, the range of the workpiece table is brought down to 45 micrometers. The PZT (piezoelectric material) pushes the moving part into the workpiece on the table. In their specific set up, four ball bearing guides support the moving part to provide a rigid horizontal plane. A rigid horizontal plane is necessary to reduce deformation from the grinding force and to reduce errors. The previous method is for micropositioning, researchers in 2002 developed an ultra-precision positioning system based on a dual servo loop and nonlinearity compensation [9]. Linearity compensation was used to improve the position accuracy of the system. Experiments suggested that the longer the motion range of the positioning system, the worse the repeatability of the process. Hysteresis, the dependence of a system on its present and past environment, is taken into account also in regards to PZT, as well as the creep, or the tendency for the PZT to deform permanently under the influence of high stress such as being heated for long periods. In order to correct the PZT’s hysteresis and nonlinearity, these researchers have utilized an Exact Model Matching (EMM) control model as seen in figure 1 [9]. This EMM control mechanism has improved the repeatability up to five times. 4 Fig. 1. EMM Control Model Research Methods After much research on the theory behind piezo and the aspects, we determined the need for a piezo transducer that was flat enough that a workpiece could lay on it. Because this would later be applied to making nanoholes on an Atomic Force Microscope (AFM), the piezo had to be smaller than 1.5 cm in diameter, which is the size of a hole on the AFM stage in which the workpiece lies. A piezo disk that was 11.88 mm in diameter and .2 mm in thickness was used to find a calibration curve. A function generator was used to apply the desired frequency, voltage, and wave shape. The frequency we used was the resonance frequency, or 3.2 kHz, which is the frequency in which our particular piezo transducer expands the most. The wave shape we chose for our experiments was a sine wave because that is what fits the equations from a theoretical model and would give us the best results. The expansion of the piezo transducer is measured by setting the transducer on top of a board with a small hole in it. The transducer, which is attached to lead wires connected to the function generator, is above a machine called a laser vibrometer. The laser vibrometer can measure the velocity of the expansion of the piezo, and send the velocity information at a point over ten seconds to a computer which will allow us to obtain the amplitude from deriving equations. After calculating the amplitude values from the velocity values, the amplitude values must be graphed to obtain a line of best fit as it relates to the increasing voltage. This line of best fit can later be used to set or find out a machining gap. Workpiece mass was another parameter tested in this case. The same set up with the laser vibrometer was used before, except that different known masses were added on top of the piezo disk to study the damping effect on the piezo transducer’s vibrations. These velocity values were 5 also obtained to calculate the amplitude, then plotted to view the trend of the amplitude as more and more mass is added. Results and Discussion As seen in figure 2, the piezo transducer was found to expand in a linear fashion with added voltage. A line of best fit was put through the data points to create an equation for the linear fit which can then be used to know how much piezo expands with a change in voltage. This calibration curve can be used to set a gap as well. For some research, a machining gap of about 100-200 nanometers is preferred to ensure less tool wear. To achieve this gap, the desired gap size must be input into the best fit equation in order to figure out the voltage that should be input into the piezo to maintain a desired machining gap. Voltage vs. Piezo Expansion (Experimental) 500 450 y = 45*x + 32 Amplitude (Nanometers) 400 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 Voltage (Volts) 7 8 Fig. 2. Voltage vs. Piezo Expansion 9 10 data 1 linear Since we will be adding a workpiece on top of the piezo transducer, it became necessary to see how adding masses affected the amplitude of the transducer with a constant voltage and constant frequency. On top of a mini piezo disk, we added different workpiece masses up to 20 grams. From our experimental values which are shown in figure 3, it is evident that as workpiece mass increases, the expansion of the piezo decreases in an exponentially decaying manner. 6 Workpiece Mass vs. Piezo Expansion (Experimental) 500 450 Amplitude (Nanometers) 400 350 300 250 200 150 100 50 0 0 5 10 15 Mass (Grams) 20 25 Fig. 3. Workpiece Mass vs. Piezo Expansion data 6 Conclusion Using the function generator to apply voltage to the piezo, we were able to vibrate the piezo and measure the vibrations using a laser vibrometer. Based on the linear piezo transducer expansion trend, we were able to determine for our specific piezo how much our piezo expanded based on the voltage applied. We were also able to determine that the amplitude exponentially decayed as the workpiece mass on the piezo increased. This information will be used in future experiments and a calibration curve for the piezo will need to be developed every time a change in piezo is made. Future researchers who are using the system of controlling the gap will need to take into consideration how a workpiece mass affects the calibration curve, but hopefully using a theoretical model of equations that takes into consideration the mass of the workpiece will allow for researchers to not use a different calibration curve each time they are machining on a new workpiece. 7 References 1. 2. 3. 4. 5. 6. 7. 8. 9. Delnavaz, A., N. Jalili, and H. Zohoor. Vibration control of AFM tip for nanomanipulation using combined sliding mode techniques. in Nanotechnology, 2007. IEEENANO 2007. 7th IEEE Conference on. 2007. Liu, W., et al., Study on the nano machining process with a vibrating AFM tip on the polymer surface. Applied Surface Science, 2012. 258(7): p. 2620-2626. Egashira, K., Microultrasonic machining by the application of workpiece vibration. Cirp Annals, 1999. 48(1): p. 131. Shabgard, M.R., Comparative Study and Mathematical Modeling of Machining Parameters in Ultrasonic-Assisted EDM of AISI H13 Tool Steel by the Application of Workpiece Vibration. Advanced materials research, 2010. 154-155: p. 1604-1613. Sundaram, M.M., G.B. Pavalarajan, and K.P. Rajurkar, A study on process parameters of ultrasonic assisted micro EDM based on Taguchi method. Journal of Materials Engineering and Performance, 2008. 17(2): p. 210-215. Li Zhang, J.D., Ultrasonic Vibration Assisted Nanomachining on PMMA with an AFM, in NAMRI/SME2012. p. 7. BAKKER, O.J., A. POPOV, and S. RATCHEV, Control of a workpiece holder with piezo-electric-mechanical actuation. Journal of Machine Engineering, 2008. 8(3). Gao, Y., D. Zhang, and C. Yu. Dynamics of a high performance workpiece table for active control during precision grinding. 2001. Liu, H., A motor-piezo actuator for nano-scale positioning based on dual servo loop and nonlinearity compensation. Journal of micromechanics and microengineering, 2003. 13(2): p. 295-299. 8