Most Likely Path Prediction Methodology for Hazardous
advertisement

Murray-Tuite, Garrido, Nune
Path Prediction Methodology for Hazardous Materials
Transported by Malicious Entities
Pamela M. Murray-Tuite
Assistant Professor
Department of Civil and Environmental Engineering
Virginia Tech
7054 Haycock Road
Falls Church, VA 22043
703-538-3764
Fax: 703-538-8450
murraytu@vt.edu
Rodrigo A. Garrido Hidalgo
Associate Professor
Department of Transportation and Logistics Engineering
Pontificia Universidad Catolica De Chile
Santiago, Chile
56-2-354-5893
Fax: 56-2-553-0281
rgarrido@ing.puc.cl
Rakesh Nune
Graduate Assistant
Department of Civil and Environmental Engineering
Virginia Tech
7054 Haycock Road
Falls Church, VA 22043
703-538-8401
Fax: 703-538-8450
nune@vt.edu
December 1, 2006
Revised April 23, 2007
Submitted for presentation at the 11th World Conference on Transport Research and
publication in the conference proceedings.
1 table, 9 figures, and 4325 words
Murray-Tuite, Garrido, Nune
Path Prediction Methodology for Hazardous Materials
Transported by Malicious Entities
Pamela M. Murray-Tuite, Rodrigo A. Garrido Hidalgo, Rakesh Nune
ABSTRACT
Emerging terrorism concerns involve scenarios where a malicious entity obtains
hazardous materials and uses them as a weapon.
This work presents a
methodology that identifies routes for hazardous materials truck drivers, allows a
truck to be hijacked from its original path, and predicts the malicious entity’s
routes to a specific target. The methodology incorporates the dual objectives of
minimizing distance to a target and maximizing consequences if law enforcement
agencies attempt to intercept the vehicle before it reaches the target. Overlaying
multiple potential routes allows law enforcement agencies to identify common
links and supports their force deployment decisions.
1
Murray-Tuite, Garrido, Nune
Path Prediction Methodology for Hazardous Materials Transported by
Malicious Entities
Hazardous material (hazmat) transportation is challenging due to its inherently
dangerous nature. Under normal conditions, paths for hazmat trucks are selected
so as to minimize a function of population exposure in the event of an incident.
However, malicious entities may obtain hazardous materials (e.g. through theft or
hijacking) and exploit the toxic or explosive character of the materials by turning
the vehicles into mobile weapons. The paths these entities select disregard the
population’s safety, and may in fact seek to maximize a function of visibility or
the consequences of a hazardous material release.
Considering the intentions of a malicious entity presents a new
perspective on hazmat routing relevant in today’s world of evolving threats. The
scenarios that motivate this study involve the hijacking of a hazmat truck from its
normal path and immediately transporting the substances to a target. This paper
identifies the truck’s original set of pareto optimal paths based on the objectives
of minimizing distance and conditional consequence. The paper then presents a
methodology for determining the malicious entity’s set of pareto optimal routes
from the hijacking point to a pre-selected target, based on the competing
objectives of minimizing distance and maximizing consequence, conditioned on
the probability of being intercepted by law enforcement prior to reaching the
target.
The remainder of this paper is divided into 5 sections. The first portion
provides background on hazmat transport and terrorism risk. The second section
formally defines the problem and notation. The methodology created to address
2
Murray-Tuite, Garrido, Nune
the problem is discussed in the third section, along with the algorithm developed
to solve the mathematical formulation. The fourth portion demonstrates the
methodology on the Santiago, Chile transportation network. Finally, conclusions
and future directions are provided.
BACKGROUND
The major types of hazmat carried by the United States’ road network include
liquefied petroleum, gasoline, explosives, and chemicals, which are toxic by
inhalation and account for 90% of the total transportation related hazmat
concerns (Brown et al. 2001). For example ammonia is a very toxic material
which is transported heavily throughout the country. The 1977 Commodity
Transportation Survey (CTS) reported that 2.8 million tons of ammonia were
transported by highway in 1977 over 476 million ton-miles (Brown et al. 2001).
The main safety concerns for hazmat transportation are accidents (see for
example (Taboada et al. 2006)) implying multiple casualties. That scenario may
occur if a truck transporting hazmat takes part in an accident spilling this material
over a densely populated area. Therefore, one of main goals of the route selection
process for typical operations is to reduce an accident’s casualty risk to a
minimum. However, this is not the sole objective to pursue (see for example
(Chang et al. 2005)), especially if multiple shipments, associated with different
types of hazmats, take place over a densely populated area. In this context, a
population may be exposed to a variety of risks depending on the properties of
hazmats to be transported.
It is desirable to program hazmat shipments where total risk imposed to
society is distributed with some level of equity. Saccommono and Shortreed
3
Murray-Tuite, Garrido, Nune
(1993), for example, calculated risk at both the individual and societal levels.
Considering the multiple perspectives on hazmat risk, the main goals for routeselection are: (a) to minimize accident risk with multiple casualties, avoiding
situations where the most dangerous risk factors are present. Such scenarios are
present in low probability of occurrence events, but with an associated high
consequence (lphc), (b) assign some portion of high risk trips to less dangerous
edges and vice versa, (c) ensure that total exposure to risk associated to hazmat
transportation on every populated center is under acceptable conditions, and (d)
maintain a certain level of equity on the spatial distribution of risk between
several populated centers.
Risk associated with this activity converts hazmat transport planning into
a difficult problem. Even though many analytic approaches focus on risk,
investigators fail to agree on how to model this series of problems. However,
investigators agree on the close relationship between risk and probability and
consequence associated with an undesirable event. Specific to hazmat transport
activities, an undesirable event is one resulting in material spilling or releasing,
named incident. Even though a number of undesirable consequences (such as
environmental damage, economic loss and injuries) could be considered, most of
the risk assessment literature focuses on casualties due to hazmat release. While
this approach simplifies the risk assessment process, its final results could be far
from an adequate modeling of the absolute risk inherent to this dangerous
activity. Moreover, valuation of number of casualties due to an incident is very
difficult considering that most of the hazmats’ direct impacts are not well known.
Luckily, for many strategic decisions related to hazmat management, a
4
Murray-Tuite, Garrido, Nune
comparison of relative risk choices is more necessary than absolute risk
quantification for every alternative.
Terrorism related risk is also extremely challenging to compute due to the
relative infrequency of events in any one given area.
As in hazmat risk
assessment, terrorism related risk is a function of probability and consequences
(Haimes 2004; Volpe Center 2003), which can be measured in terms of casualties
or economic loss (Bush 2003; Crowther and Haimes 2005). Previous efforts to
integrate security into hazmat routing involved providing general guidance
(USDOT 2002 ) and including the possibility of hijacking (determined from
population density) among the path selection criteria (Huang et al. 2004a; b).
However, these studies did not address actions taken by malicious entities after
successfully hijacking the hazmat vehicle.
This paper extends previous considerations for hazmat routing.
The
initial path is determined using the common considerations of casualties and cost
(distance). This study acknowledges multiple factors contributing to a successful
hijack. The contribution of this paper is integrating previous considerations with
terrorism scenarios and developing a path prediction methodology from the point
of interception by a malicious entity to a pre-specified target.
PROBLEM DEFINITION
This work investigates the path selection by a malicious entity with a hijacked
hazardous materials truck. The malicious entity is intent on causing damage
within a network G(N,A) consisting of a set of nodes N and directed arcs A. Each
arc a has an accident probability pa, consequence Ca of a hazardous materials
5
Murray-Tuite, Garrido, Nune
incident (intentional or accidental), distance da, and a probability a that the
hijacker is intercepted by law enforcement.
The truck’s original driver begins his/her trip from origin node O and
intends to arrive at destination node D. The path Q selected by the original
driver minimizes a function of the conditional expected consequence and the
total trip length. Each node j along this original path is treated as a potential
hijacking location and has an associated probability Phj of a successful hijack.
For the purposes of this work, a hijacking will occur with certainty, but the node
at which this occurs is based on the probability Phj.
Once the hijacking occurs, the malicious entity heads toward a selected
target T.
The path selected by the malicious entity is a function of the
consequence of a hazmat incident, conditioned on the probability of being
intercepted by law enforcement, and distance. The links in the chosen path are
indicated by the values of the binary, integer decision variables xa, which take the
value 1 if link a is in the path and 0 otherwise.
Table 1 provides a summary of the notation used in this paper and
described above.
Methodology
The following assumptions are made in the development of the methodology to
identify likely paths selected by a malicious entity transporting hazardous
materials to a target with the intent of using the loaded truck as a weapon.
o A hijacking will occur with certainty, though the location depends on Phj.
o Hijacking is only possible at discrete locations (nodes) in the network.
6
Murray-Tuite, Garrido, Nune
o The probability of a successful hijack is likely to depend on the presence
of unused buildings, parks, parking lots, traffic control devices, sparsely
populated areas, and connectivity to high capacity roads. However, for
simplification purposes, Phj is randomly assigned a value in this initial
study.
o The hijacked truck is used immediately for malicious purposes, that is,
the truck is not hidden and stored for later use.
o The probability that the hijacked truck is intercepted, a, is likely to
depend on the presence and proximity of law enforcing agency on the
link and traffic control devices at the nodes, police patrol patterns,
congestion levels, and link characteristics, such as capacity, speed, and
free flow travel time. However, for simplification purposes, a is
randomly assigned a value in this initial study and treated as a constant,
rather than a time dependent variable.
o The magnitude of each arc’s accident probability, pa, is sufficiently small
that the probability of a hazmat accident on a given route Q can be
approximated as in equation 1 (Sherali et al. 1997).
PQ pa y a
(1)
aQ
The above simplifications make the mathematical formulations described
in the methodology tractable. The methodology consists of two main steps.
First, k preferred paths are generated from O to D for the original hazmat truck
driver. Then m paths from each node in the k paths to a target T are determined.
The formulations involved in each of these steps are described below.
7
Murray-Tuite, Garrido, Nune
Step 1: Find k preferred paths for the original driver
The k preferred paths are determined from the formulation described by
equations (2 – 4).
p C y
p y
a
aA
min z1 1
aA
a
a
a
wmin
a
wmax wmin
(1 1 )
d
aA
a
y a u min
u max u min
(2)
Subject to:
1
ya ya 1
aF ( j )
aH ( j )
0
ya {0,1}
if j O
if j D
otherwise
j N
a A
(3)
(4)
The objective function (2) allows for linear combinations of the conditional
expected consequence and path length. This objective function is subject to the
constraints in equations (3-6). Equation (3) represents the conservation of flow
at intermediate nodes along the path and ensures that the truck takes only one
link from the origin and one link into the destination. The final constraint
requires the decision variables to be binary integers.
Step 2: Find m preferred paths for the malicious entity
In this initial study, the malicious entity’s selection of a hijacking point and
subsequent path to the target are treated as sequential and separate decisions. For
each of the k paths, the node with the highest probability of a successful hijack is
identified. These nodes represent the origins of the malicious entity’s paths. The
8
Murray-Tuite, Garrido, Nune
formulation for the malicious entity’s path selection shows many similarities to
that for the original driver; however, the entity is not concerned about
minimizing consequences resulting from an incident along the path. In fact, the
entity may seek to maximize the consequences in the event that law enforcement
intercepts the vehicle enroute to the target. The m paths for the malicious entity
are found through the formulation in equations (5-7).
C x
x
a
aA
min z 2 2
aA
a
a
a
vmin
a
vmax vmin
(1 2 )
d
aA
a
xa s min
(5)
s max s min
Subject to:
1
xa xa 1
aF ( j )
aH ( j )
0
xa {0,1}
if j O'
if j T
otherwise
j N
a A
(6)
(7)
The objective function, represented by equation (5) allows for linear
combinations of the malicious entity’s desires to maximize the consequence of an
incident along the path, conditioned on interception by law enforcement, and the
trip length.
As in the previous formulation, equation (6) represents the
conservation of flow at intermediate nodes along the path and ensures that the
truck takes only one link from the origin and one link into the destination. The
final constraint ensures that the decision variables are binary integers.
Solution Procedure
9
Murray-Tuite, Garrido, Nune
The objective functions for the mathematical formulations presented above are in
a fractional form and cannot be solved using standard route finding algorithms,
such as Dijkstra’s, due to possible discontinuities.
Fractional programming
methods, such as Dinkelbach’s Algorithm (Schaible 1976), or the procedure
described below could be used. The procedure is implemented in MATLAB
2006b version 7.2.0.232.
Step 1: Initialize
o Assign a value of infinity to dist(i), which is the distance of reaching node
i from the origin.
o For each node i, assign a value of infinity to cap(i), which is the
cumulative probability of capture from the origin to node i.
o For each node i, assign a value of infinity to ccc(i), which is the
cumulative expected consequence due to capture by law enforcement
from the origin to node i.
o For each node i, assign a value of infinity to z2(i), which is the objective
function value for the malicious entity’s path up to and including node i
(see equation 5).
o Create a set M, representing nodes to be visited, and initialize it to the
null set.
o Create an array parent(i), representing the predecessor of node i, and
initialize it to the null set.
Step 2: Populate set M
Find all nodes connected to the origin and place those nodes in set M.
10
Murray-Tuite, Garrido, Nune
Step 3: Update node values
With given values of vmax, vmin, smin and smax (wmax, wmin, umin and umax in the original
path determination), update dist(i), cap(i), ccc(i), and z2(i) for each node added
to M.
Step 4: Breadth Search
For each node in M, find the connecting nodes.
If
ccc(i ) aCa
vmin
dist (i) d a smin
cap(i ) a
z2 ( j ) 2
(1 2 )
, then
vmax vmin
smax smin
where a is the link connecting nodes i and j
o Update dist(i), cap(i), ccc(i), and z2(i) for the connecting nodes.
o Add these nodes to M.
o Set parent(i) equal to the predecessor node.
Step 5: Check for Cycles
To check for cycles, use the parent array to ensure that the origin node is reached
in fewer iterations than the number of nodes in the network. If a cycle is found,
return the previous values to dist(i), cap(i), ccc(i), z2(i), and parent(i) and do not
connect node i.
Step 6: Back trace the path
Once reaching the destination, use parent to trace the path from the destination to
the origin. The value of z2 at destination node gives the final objective value of
the path.
11
Murray-Tuite, Garrido, Nune
Follow an analogous procedure for determining the original path, but substitute
the following variables for cap(i), ccc(i), and z2(i), respectively.
o acc(i) is the cumulative probability of an accident up to that node from
the origin.
o cca(i) is the cumulative expected consequence due to an accident up to
that node from the origin.
o z1(i) is the objective function value for the original path to node i (see
equation 2).
Also use an analogous procedure to determine the values of smax, smin,umin, umax,
vmax, vmin,and wmax, wmin. The objective functions for the procedures determining
these values should be: minimize
1.
p C
p
a
aA
aA
2.
aA
d
aA
4.
for Umin
a
p C
(p
aA
3.
a
a
a
a
) for Umax,
a
for smin and wmin
(- d a ) for smax and wmax
aA
12
Murray-Tuite, Garrido, Nune
5.
C
a
a A
a A
6.
a
for vmin
a
C
a A
a A
a
a
for vmax..
a
SAMPLE APPLICATION
The above methodology is applied to Santiago, Chile’s transportation network.
Roads acceptable for truck traffic are extracted from the entire road network.
The extracted network consists of 2212 nodes and 6681 arcs. Results of the two
path finding steps are described below.
Step 1: Find k preferred paths for the original driver
The original driver’s preferred paths for a given origin-destination pair are
identified by varying 1 from 0 to 1 in increments of 0.1. Consequences are
based on population.
To estimate the probability of an accident, it is necessary to identify and
evaluate (probabilistically) different scenarios for the occurrence of an incident
which can be represented as a sequence of episodes. One such representation is
known as an event tree. The most common way to build an event tree is using
deductive logic, i.e., starting with an initial event, fixing all the possible
sequences of the following episodes, and determining the result of each
sequence. As each event is conditional on the occurrence of events that precedes
it in the tree, the joint probability of the intersection of episodes that constitute a
13
Murray-Tuite, Garrido, Nune
sequence (or scenario) is found by multiplication. The tree structure requires that
each event is defined by its probability, conditioned on the occurrence of the
events that precede it in the tree, (not necessarily in time). In other words, the
selected structure is not defined by the relationship among these episodes, but by
the probabilistic condition, which may or may not reflect time (Paté-Cornell
1984).
The episodes that will later form the event tree are defined as follows:
B
: a traffic accident occurs in the arc a A.
C
: the traffic accident corresponds to a fall, collision, crash or
overturn of the affected vehicle.
E
: the affected vehicle by an accident in arc a A is a truck.
H
: the involved truck in the accident in arc a A is carrying hazardous
materials.
F
: the accident that involves a truck with hazmat has catastrophic
characteristics (i.e., it caused deaths or injuries to the surrounded
population).
Let Pa be the probability that a traffic accident occurs in arc a A, i.e., Pa = p
(B). The expression to estimate this probability is shown in equation (8):
Pa
Na
Fa
(8)
where Na represents the number of traffic accidents on arc a A , expressed in
accidents per hour, and Fa denotes the vehicle flow on arc a A for the same
period of analysis.
14
Murray-Tuite, Garrido, Nune
Considering the traffic accidents, it has been assumed that only falls,
collisions, crashes and overturns represent a potential catastrophic risk when the
involved vehicles carry hazmat. Consequently, let Py represent the probability
that the event C occurs on arc a A, if an accident has taken place on that arc.
So, Py = p(C|B). If Pcam is the probability that the affected vehicle in an accident
on arc a A is a truck, given that events B and C took place, then Pcam =
p(E|B,C). Now, let Pw be the probability that the event H occurs, since all the
precedent episodes took place. This probability can be represented by equation
(9):
Pw = p(H|B,C,E) = Pa Py Pcam p(H)
(9)
Let Px represent the probability that given that episodes B, C, E, H have
occurred, the event F represents a catastrophic incident, i.e. Px = p(F|B,C,E,H).
Consequently, for any arc a A, the probability pa that a truck with
dangerous freight suffers a catastrophic accident while carrying freight on such
arc is expressed as in equation (10).
pa = Pa · Py ·Pcam ·Pw · Px
(10)
The number accidents in each arc was obtained from INE (1998),
categorized by type of severity and type of vehicles involved. With these data the
following values were computed: Py = 0.88 and Pcam = 0.162. At the network
level, i.e., on average, a registered accident has a probability of 0.88 of being a
fall, collision, crash or overturn, and any involved vehicle has a probability of
0.162 of being a freight vehicle. The INE database was complemented with other
15
Murray-Tuite, Garrido, Nune
sources (CONAMA 1994; Dames and More 1994; MTT 1991; RSPA 2001) to
estimate the remaining probabilities in expression (10).
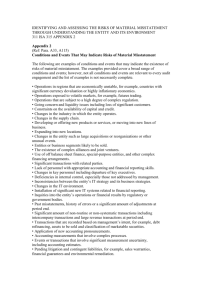
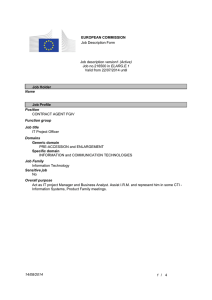
These probabilities are used to generate the original driver’s preferred
paths, which are shown in Figures 1-4 for different values of 1. For values
between 0 and 0.6, the paths are nearly identical to the one shown in Figure 1.
Minimizing path length is dominant in these route selections. A significantly
different path is obtained for 1 = 0.7. Between weights of 0.7 and 1.0, the
conditional expected consequence gains influence on route selection. Figures 2-4
show that path length significantly increases as consequences are minimized.
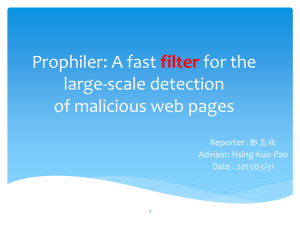
Step 2: Find m preferred paths for the malicious entity
For demonstration purposes, the original path shown in Figure 3 is treated as the
actual path selected by the original driver. As mentioned above, the probabilities
of a successful hijacking attempt are randomly generated in this initial study.
The malicious entity selects the node with the highest success probability,
indicated in Figure 3 by the “hijack point” label. The malicious entity’s target is
located in the downtown area of Santiago and labeled as such in Figures 5-8.
Paths for the malicious entity from the hijacking point to the target are
generated according to equations (5-7). Probabilities indicating the potential for
law enforcement agencies to intercept the hijacked truck are randomly generated
for this demonstration. The probabilities are sufficiently small so that equation
(1) holds. The weight 2 on the conditional consequence is varied between 0 and
1 by 0.1; additional resolution between 0.6 and 1.0 is also considered. The paths
generated for 2 less than 0.6 are similar and dominated by distance
considerations; Figure 5 is representative of these routes. The consequence term
16
Murray-Tuite, Garrido, Nune
has more effect beginning with a 2 of 0.6. Higher values of the weight yield
significantly different paths as the truck covers longer distances in order to obtain
a greater conditional expected consequence. Figures 6-8 demonstrate this effect.
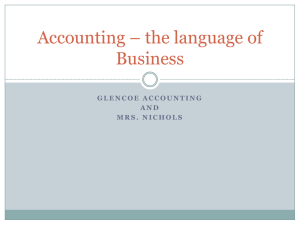
The different routes obtained by varying 2 are plotted on a single map
(Figure 9), giving an idea of the path intersections. It can be observed from
Figure 9 that the routes obtained a high degree of overlap along the shortest route
(similar to Figure 5) and in the eastern part of the city. The malicious entity is
more likely to travel in these areas than others, hence law enforcing authorities
can increase their surveillance in these areas for effective capture of a hijacked
truck.
CONCLUSIONS AND FUTURE DIRECTIONS
This paper provided an initial methodology for identifying paths likely to be
taken by a malicious entity who hijacks a hazardous materials truck from its
original path with the goal of turning the truck into a weapon against a specific,
stationary target. The methodology involves the dual objectives of minimizing
distance to the target and maximizing visibility and damage in case law
enforcement agencies attempt to intercept the hijacked vehicle. The approach
allows for tradeoffs among these objectives, leading to the identification of
multiple paths.
Overlaying these potential routes allows law enforcement
agencies to identify common links.
Upon receiving information about the
hijacking event, agencies should deploy forces to these links in order to intercept
the entity with a higher degree of confidence than if no path prediction
information were available.
17
Murray-Tuite, Garrido, Nune
This work is an initial study and has five directions that will be examined
in the immediate future. First, the hijacking success factors will be thoroughly
investigated and combined into a single term that will replace the randomly
generated probability.
Similar to the first, the second direction involves
combining the law enforcement interception factors to replace the randomly
generated probabilities for Step 2. Third, target selection uncertainty will be
incorporated into the methodology.
Fourth, real time pattern recognition
methods will be developed to determine when a hazardous materials truck
deviates from acceptable paths. Finally, security measures beyond identification
tags will be explored to decrease the likelihood of hazardous materials trucks
being used as weapons. The security measures and the tool resulting from this
initial methodology and its enhancements will greatly aid defense and law
enforcement agencies in reducing risk associated with transportation of
hazardous materials by malicious entities.
18
Murray-Tuite, Garrido, Nune
REFERENCES
Brown, D. F., Hwang, S., O'Steen, J., Policastro, A. J., and Dunn, W. E. (2001).
'A Risk Assessment for National Transportation of Selected Hazardous
Materials.' 80th Annual Meeting of the Transportation Research Board,
Transportation Research Board, Washington, D.C.
Bush, G. W. (2003). 'Homeland Security Presidential Directive / HSPD-7.' The
White House, ed., Office of the Press Secretary.
Chang, T.-S., Nozick, L. K., and Turnquist, M. A. (2005). 'Multiobjective Path
Finding in Stochastic Dynamic Networks, with Application to Routing
Hazardous Materials Shipments.' Transportation Science, 39(3), 383-399.
CONAMA. (1994). Estudio de Impacto Ambiental Centro de Tratamiento de
RSP Hidronor Chile. 1994, Comisión Nacional del Medio Ambiente
(CONAMA), Santiago de Chile.
Crowther, K. G., and Haimes, Y. Y. (2005). 'Application of the Inoperability
Input-Output Model (IIM) for Systemic Risk Assessment and
Management of Interdependent Infrastructures.' Systems Engineering,
8(4), 323-341.
Dames and More. (1994). Plan de Manejo de Residuos Sólidos Domiciliarios e
Industriales (Tóxicos y Peligrosos); Diseño e Implementación de un
Sistema de Control del Manejo de Residuos Sólidos Peligrosos en la
Región Metropolitana, Santiago de Chile.
Haimes, Y. Y. (2004). 'Risk Modeling, Assessment, and Management of
Terrorism.' In: Risk Modeling, Assessment, and Management, I. John
Wiley & Sons, ed., John Wiley & Sons, Inc, Hoboken, 684-716.
19
Murray-Tuite, Garrido, Nune
Huang, B., Cheu, R. L., and Liew, Y. S. (2004a). 'GIS and genetic algorithms for
HAZMAT route planning with security considerations.' International
Journal of Geographic Information Science, 18(8), 769-787.
Huang, B., Cheu, R. L., and Liew, Y. S. (2004b). 'Incorporating Security in
HAZMAT Route Planning Using GIS and AHP.' In: 83rd Annual
Meeting of the Transportation Research Board, Transportation Research
Board, Washington, D.C.
INE. (1998). Anuario de Estadísticas Policiales. 1998, Instituto Nacional de
Estadísticas: Departamento de Estadísticas Demográficas y Sociales,
Santiago de Chile.
MTT. (1991). Encuesta Origen-Destino de Viajes del Gran Santiago, Comisión
de Planificación de Inversiones en Infraestructura de Transporte
(Ministerio de Transporte y Telecomunicaciones), Santiago de Chile.
Paté-Cornell, M. E. (1984). 'Fault Trees vs. Event Trees in Reliability Analysis.'
Risk Analysis, 4(3), 177-186.
RSPA. (2001). 'Hazmat Summary by State for Calendar Year.' Research &
Special Programs Administration (R.S.P.A), Office of Hazardous
Materials Safety, The United States Department of Transportation's
Research and Special Programs Administration, 1993-2001.
Saccomanno, F. F., and Shortreed, J. H. (1993). 'Hazmat Transport Risks:
Societal and Individual Perspectives.' Journal of Transportation
Engineering, 119(2), 177-188.
Schaible, S. (1976). 'Fractional Programming. II, on Dinkelbach's Algorithm.'
Management Science, 22(8), 868-873.
20
Murray-Tuite, Garrido, Nune
Sherali, H. D., Brizendine, L. D., Glickman, T. S., and Subramanian, S. (1997).
'Low Probability - High Consequence Considerations in Routing
Hazardous Material Shipments.' Transportation Science, 31(3), 238-251.
Taboada, J., Matias, J. M., Saavedra, A., Ordonez, C., and Marinez-Alegria, R.
(2006). 'Neural Network Models for Assessing Road Suitability for
Dangerous Goods Transport.' Human and Ecological Risk Assessment,
12, 174-191.
USDOT. (2002 ). 'Enhancing Security of Hazardous Materials '.
Volpe Center. (2003). 'Risk Assessment and Prioritization.' <
http://www.volpe.dot.gov/infosrc/journal/2003/chap1.html> (July 14,
2006).
21
Murray-Tuite, Garrido, Nune
List of Tables
Table 1. Summary of Notation
22
Murray-Tuite, Garrido, Nune
Table 1 Summary of Notation
Notation
G(N,A)
A
N
O
O’
D
Q
T
Ca
da
pa
Phj
ρa
smin
smax
umin
umax
vmin
vmax
wmin
wmax
xa
ya
z1
z2
Interpretation
Sets and Indices
Road network consisting of a set N of nodes and set A of directed
arcs
Set of directed arcs, indexed by a
Set of nodes, indexed by j
Origin node of hazmat truck
Origin node of the malicious entity’s path
Destination node of the hazmat truck
Original path of the hazmat truck
Possible target for the malicious entity
Parameters
Consequence of a hazmat incident on link a
Length of link a
Probability of an accident on arc a
Probability of a successful hijack at node j
Probability of interception by law enforcement
Weight associated with conditional expected consequence
Minimum distance for the malicious entity’s path
Maximum distance for the malicious entity’s path
Minimum distance for original path
Maximum distance for original path
Minimum conditional expected consequence for the malicious
entity’s path
Maximum conditional expected consequence for the malicious
entity’s path
Minimum conditional expected consequence for original path
Maximum conditional expected consequence for original path
Variables
Binary integer decision variable taking the value 1 if the link is
chosen by the malicious entity and 0 otherwise
Binary integer decision variable taking the value 1 if the link is
chosen by the original driver and 0 otherwise
Value of objective function for original driver’s path selection
Value of objective function for malicious entity’s path selection
23
Murray-Tuite, Garrido, Nune
List of Figures
Figure 1: Original path obtained for λ1 =0.3
Figure 2: Original path obtained for λ1 =0.7
Figure 3: Original path obtained by for λ1 =0.8
Figure 4: Original path obtained by for λ1 =1.0
Figure 5: Predicted malicious entity path for λ2 =0.2
Figure 6: Predicted malicious entity path for λ2 =0.7
Figure 7: Predicted malicious entity path for λ2 =0.85
Figure 8: Predicted malicious entity path for λ2 =.95
Figure 9: Overlap of all malicious entity paths obtained with various values of λ2
24
Murray-Tuite, Garrido, Nune
Figure 1: Original path obtained for λ1 =0.3
25
Murray-Tuite, Garrido, Nune
Figure 2: Original path obtained for λ1 =0.7
26
Murray-Tuite, Garrido, Nune
Figure 3: Original path obtained by for λ1 =0.8
27
Murray-Tuite, Garrido, Nune
Figure 4: Original path obtained by for λ1 =1.0
28
Murray-Tuite, Garrido, Nune
Figure 5: Predicted malicious entity path for λ2 =0.2
29
Murray-Tuite, Garrido, Nune
Figure 6: Predicted malicious entity path for λ2 =0.7
30
Murray-Tuite, Garrido, Nune
Figure 7: Predicted malicious entity path for λ2 =0.85
31
Murray-Tuite, Garrido, Nune
Figure 8: Predicted malicious entity path for λ2 =.95
32
Murray-Tuite, Garrido, Nune
Figure 9: Overlap of all malicious entity paths obtained with various values
of λ2
33