Conservation of Energy
advertisement

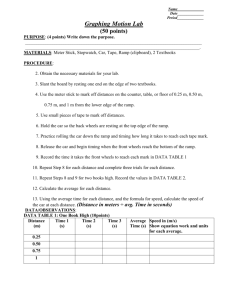
AP Physics 2/6/2016 Conservation of Energy Problem Solving In order to demonstrate how the conservation of energy is reflected in the solution of a physics problem, the following procedure will be used to solve problems. 1. Identify the (Mechanical) System: A system is a collection of interacting objects. Identifying a system means listing the objects and how they interact. In order to use the conservation of energy, the system must be closed and isolated. Closed means that no objects (matter) move into or out of the system; isolated means that no outside influences (forces or energy) affect the system. A simple schematic diagram listing the objects and their interactions can define the system whose energy is conserved. 2. Find the States of this System: A state of a mechanical system is a specific arrangement of the parts/objects in the system; it is specified by listing the kinematic variables of each object: position and velocity relative to a specified inertial frame of reference. The states may be described explicitly by providing positions and/or velocities of individual objects or implicitly by providing conditions that must be met. In which case, the kinematic variables may need to be determined using Newton’s Laws or other constraints. 3. Determine the Types of Energy Involved: The types of energies are determined by the types of interactions among the elements of the system. For our purposes, we will consider the following types of energy: kinetic energy (KE) associated with the motion of objects in the system; gravitational potential energy (GPE) due to interactions between objects and the Earth which involve changes in vertical position; elastic potential energy (EPE) which involves objects compressing or stretching springs; and thermal energy (TE) which involves frictional forces converting mechanical energy into internal energy of objects in the system. Note: we will not be concerned with how this thermal energy is distributed among individual objects (i.e., how hot different objects become). 4. List the Distribution of Energy in each State: In each state of the system, the energy will be distributed differently among the various types present. A table where the rows are the different types of energy and the columns are the different states of the system will effectively describe how energy is distributed. 5. Equate the Total Energy in each State: If the system is closed and isolated, then the total energy (sum of all the different forms) in each state should be the same or the total energy will be conserved. The sum of each column in the table should be equal. By equating these sums, we can set limits on future states of a system as it undergoes changes or restrict previous states that led to the system’s final state. Example A ramp has a spring (with a force constant k) secured to its base. The ramp is at an angle to the horizontal. A block with mass m is placed on the spring. The coefficient of kinetic friction between the block and the ramp is k. The spring is to be used to propel the block a distance d up the ramp from the end of the uncompressed spring. Find how much the spring must be compressed, x, in order to accomplish this. Assume the block is launched from rest and that the spring is strong enough to “overcome” static friction between the block and the ramp. d x uncompressed spring Solution 1. Schematic Diagram of System spring normal Ramp Block gravity Earth friction 2. States of System Frame of reference: ramp with x-axis up along ramp and origin at end of uncompressed spring Initial state: block at rest (vi =0) and position at –x ramp and Earth undergo no changes in position/velocity Final state: block at rest (vf=0) and position at +d (up ramp from end of spring) 3. Forms of Energy kinetic energy of block elastic PE of compressed spring gravitational PE of block (since it moves vertically) thermal energy 4. Distribution of energy Energy KE(block) EPE(block-spring) GPE(block-Earth) TE 5. Initial State 0 ½ kx2 -mgx sin Q Conservation of Energy: Solve for x from ½ kx2 – mgx sin + Q = mgd sin + Q + kmg(d+x) cos Final State 0 0 +mgd sin Q+kmg(d+x) cos