6_loci
advertisement

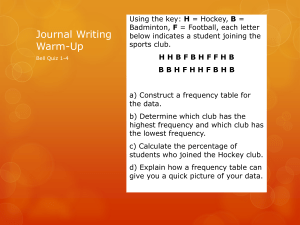
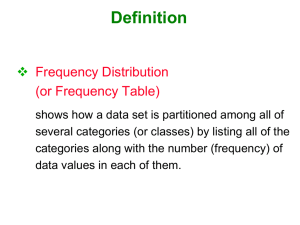
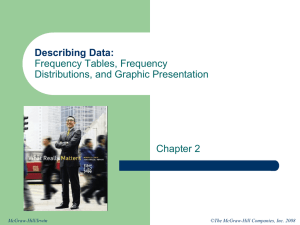
Location SRBL locates bursts on the sun's disk using a novel technique that exploits spectral artifacts introduced by the geometrical response of its antenna and feed. Scheme The sun's radius is 16 arcminutes, as seen from Earth, and SRBL tracks it using a parabolic dish with a focal length of 27 inches. If this reflector had an optical-quality (mirrored) surface, then a solar image 6.4 mm in diameter would appear at its focal plane. But the actual surface is relatively rough and astigmatic, causing such blurring that the focus is instead only heated by incident radiation. At radio wavelengths (of 1 cm or more) SRBL's antenna is smooth and well-formed, but solar images are still blurred, this time by diffraction. The limiting angular resolution is W /2D radians, where is wavelength and D is dish diameter; i.e. a point source on the sky focuses to a nearly Gaussian smear with an intensity that varies with angle as I() exp(−2/2W2). With D = 6 ft, then W 5/, where is frequency in GHz; i.e. SRBL's "beam pattern" nearly matches our sun’s apparent radius at the highest operational frequency of 18 GHz. Thus, so long as SRBL points near sun-center, it can maintain a view of the entire solar disk at all frequencies while taking data. Figure 1. Overall geometry. Suppose a dish 50 feet in diameter was used instead. A beamwidth of 18' at 2 GHz would obtain, enough to include the whole sun. Solar monitoring might proceed at 2 GHz and, when a burst is noticed, mechanical scans could begin while more frequencies are sampled. This may take several tens of seconds, during which time the eruption would evolve, or end. Location resolutions of 2' might be reached, corresponding to beamwidths around 18 GHz. Then again, such higher-frequency components would often be missed. SRBL avoids this shortfall by using a smaller dish and sequencing through a large set of frequencies every few seconds, each one poised to observe activity occurring anywhere on the sun. 35 Figure 2. Left: solar "images" at focus for different wavelengths, shown actual scale. Right: cross section of SRBL beam pattern. SRBL's circular receiving element, or “feed” is 7 inches across, and therefore blocks only ~1% of the incident radiation. It is coaxial with the dish's axis of symmetry, or “boresite” and located with its front face on the focal plane. That face is clad with two interleaved copper spirals spanning radii between 0.15 cm and 7.5 cm, and that vary in radius with angle roughly as r ~ (7.5cm) e −n/6, where n counts the number of turns. It is receptive to frequencies from about 500 MHz to just over 18 GHz. 36 Figure 3. Interlaced traces on the front face of SRBL's log-spiral feed, drawn to scale. Equal areas are covered and uncovered. Traces at the perimeter (7.5 cm from center, not shown) taper in width. This pattern is backed by a cylindrical cavity, 6 cm deep, with dielectric inside shaped to enhance responses for radiation coming from in front. This feed is a quarter-wave, circularly polarized receiver; i.e. electromagnetic radiation impinging upon those traces is absorbed preferentially at radii of r ~ /4. However, since logarithmic spirals do not form a set of nested circles, this resonant response is not centered, but instead follows geometrically at radii of R ~ −dr/dn ~ /24, roughly matching the sun's diameter at 2 GHz. In other words, the effective electrical center of SRBL's receiver is offset from its boresite, spiralling around at increasing radii for larger wavelengths. As a result, measured spectra contain artifacts, “modulations” that vary in phase and amplitude depending upon where a radio source is located. For example, suppose an event occurs on the sun's central meridian, but at 20 north latitude; i.e. = 16'sin20 = 5.5' above the boresite (assuming perfect pointing at sun-center). A corresponding burst "image" appears at a radius of R = (27 inches) tan = 0.11 cm on the feed, where wavelengths near ~ 24R = 2.62 cm ( ~ 11.5 GHz) encounter maximum reception. Half a turn later around the spirals, at ' ~ 2.62 e0.5/6 = 2.85 cm, the effective electrical response- 37 center will be offset by tan−1[( + ')/24F] = 11.4' from this image. Mean beamwidths at ' are W 25.6', and so the observed flux is reduced to exp(−2/2W2) 90.5% of maximum there. Further dips occur with each spiral cycle, regularly spaced in log. There is no frequency at which signals reach maximum strength for on-axis sources. Modulations vanish there, but fluxes are uniformly reduced by R2/2W2 2%. At all other burst locations these artifacts should appear across the entire spectrum, exhibiting consistent phases and amplitudes within every period. SRBL “locates” bursts by deconvolving such artifacts. Figure 4. Left: position of effective electrical center of SRBL's feed, shown at actual scale. Right: separate center offsets in azimuth and elevation versus the logarithm of frequency. These are 90 out of phase and sinusoidal, decreasing in amplitude for higher frequencies. Operational Brief First, calibrations are needed to account for non-ideal circumstances: asymmetries, non-linearities, etc. These provide an instrument-specific set of parameters with which to fit spectral modulations. There is a difficulty however; only the observed spectra are available, which include modulations. The shape of incident signals are unknown in principle, yet must be reconstructed. If those inputs varied rapidly with wavelength, SRBL's task would be hopeless. But solar bursts at microwave frequencies are typically broadband, smoothly extending over many GHz, peaking in intensity roughly between 2 and 10 GHz. As many as thirteen modulations would appear in spectra spanning 2 − 18 GHz. This is neither too many nor too few to allow use of smoothness criteria in extracting event locations, if at least a handful of frequencies are sampled within each period. To obtain reasonable signal-to-noise ratios, SRBL dwells 40 ms to measure fluxes (actually integrating only during the later 30 ms), requiring 4.8 seconds to sample 120 frequencies: at most 5 in each of the 245, 410, and 610 MHz bands, and the rest logarithmically spaced from 1 to 18 GHz. Microwave bursts often evolve on similar time scales. Therefore, complete spectra can usually be recorded quickly enough to avoid time-dependent distortions of modulations. The quiet-sun is continuously observed, and levels are averaged back in time to smooth over slow gain drifts or weather changes. These signals provide reference spectra and locations. When certain thresholds are crossed, bursts are declared, and the excess-spectra are separately analyzed. Burst locations with respect to sun-center are given by the vectorial difference between excess and quiet-sun offsets. Noise and other irregularities can severely limit capabilities. There is, however, considerable flexibility in implemention strategies for sampling, calibration, and software algorithms. (A number of different techniques have been tested, and ideas are still evolving.) Overall, SRBL's design is balanced and well matched to its intended signals. 38 Figure 5. Relative intensity versus frequency for different burst locations: 1) at sun-center, 2) half way to East limb, 3) at East limb, 4) at West limb. Such modulations appear throughout burst and quiet-sun spectra, forming the basis of SRBL's location capability. Algorithms SRBL operates in Cartesian coordinates referenced to its antenna boresite, with angular units. The effective electrical center of its feed is (X,Y) = (Rcos,Rsin), where is the spiral angle. (See Figure 6 for layout details.) A point source on the sky at location (x,y) = (rcos,rsin) with spectrum S0() will produce measured fluxes of S() = S0()exp(−2/2W2) where 2 = (x−X)2+(y−Y)2. Modulations appear in S due to inbedded dependencies, which increase in amplitude with and r. Suppose (X,Y), W, and are known as functions of frequency through calibrations to be described later. The task is to extract (x,y), given S. S 0 is not known, but it is presumed to be “smooth” on scales comparable to instrumental modulations. Therefore the function f = lnS + [(x−X) 2+(y−Y)2]/2W2 must be unmodulated. 39 Figure 6. Focus geometry. There are several means to obtain (x,y), each prone to different sorts of error. The present option of choice is to construct a grid of all likely (x,y) values, calculating f at each point, and selecting the best fit. This fit is recognized in one of two ways depending upon which spectrum is being examined. For quiet-sun spectra, which yield pointing offsets that are in place before bursts occur, f is approximated by a quadratic in frequency (anticipating a black-body distribution of fluxes). For burst spectra, smoothness is indicated when no residual modulations are found. In more detail, consider burst data within one modulation period, given by a change in of 2. Label the frequencies in that span with indices, n. Compute fn = lnSn + [(i−Xn)2+(j−Yn)2]/2Wn2 at each n, with a grid spacing of = 1 arcminute and where (i,j) are held as fixed integers ranging from −32 to +32. Now suppose these fn are to be fit by aun+bvn+c where (u,v) are known functions (X,Y)/W 2, and (a,b,c) must be determined. Proceed by minimizing the total variance, e = Σ[fn − (aun+bvn+c)]2wn/Σwn, where relative weights of wn = exp(−(n−0)2/42) are used to emphasize frequencies in the middle of this period (at 0). Setting partial derivatives with respect to a, b, and c to zero gives FU = aUU + bUV + cU, FY = aUV + bVV + cV, and F = aU + bV + cw, where new symbols have been defined: G ≡ Σgnwn, GH ≡ Σgnhnwn, and w ≡ Σwn. Therefore, a = (VfuVvv − VfvVuv)/d, b = (VfvVuu − VfuVuv)/d, and c = [F(UU.VV − UV.UV) − U(UF.VV − UV.FV) − V(UU.VF − UV.UF)]/d, with d = VuuVvv − VuvVuv and Vgh ≡ GH − G.H/w. Then revisit all n to eliminate measurements at which aun+bvn+c differs from fn by more than 5√e, and repeat the whole process until a good fit is returned within this span of frequencies. Note, V gh is invariant with respect to commonmode offsets in g or h, so the results (a,b,c) are stable. Best (i,j) grid points correspond to the least average (a 2+b2), accumulated for periods centered at every frequency. These are refined by fitting Σ(a2+b2) with a quadratic in (x,y) extending to nearby points, and minimizing. 40 To assess location uncertainties, approximate f − (au+bv+c) by A+B within each period, and use the overall fit variance to weight [(x−X)2+(y−Y)2]/W4. Then sum these for all frequencies in the spectrum, invert, and take the square root. For quiet-sun data, choose (u,v) = (,2) and fit 8 spans of . Within each span, use weights of wn = exp(−(n−0)2/322). Best (i,j)’s locate the least average variance accumulated over all spans. Otherwise, everything proceeds as for burst data. Example Three spectra are needed to extract event locations with respect to sun-center (xB−xQ,yB−yQ): SC (cold-sky), SQC (quiet-sun plus cold-sky), and SBQC (burst plus quiet-sun and cold-sky). SC is obtained from pre-dawn calibrations, and the others are measured during patrol. From these, separate boresite offsets are calculated: SQ = SQC − SC yields (xQ,yQ), and SB = SBQC − SQC yields (xB,yB). As an example, consider the data shown in Figure 8, taken at the peak of a moderately sized burst. Note that cold-sky flux levels SC (designated 'C' in the top panel) are significant and evidence considerable irregularities. Vagaries in SC, apparent also in SQC and SBQC, are removed by subtraction (lower panels). Modulations are obvious in the resulting SB, indicating large values for xB and/or yB. Fitted offsets were (xQ,yQ) = (−6.6',−2.3') ± 1.3' and (xB,yB) = (−21.7',2.8') ± 1.1', giving (xB−xQ,yB−yQ) = (−15.1',5.1') ± 1.7'. Optical images taken through an H filter by SOON telescopes showed a flare at (−10.9',8.3') with respect to sun-center. This is 5.3' distant from SRBL coordinates. Assuming an optical uncertainty of 1' (to account for possible H vs. radio source mismatches) and adding errors in quadrature, a relative discrepancy of 5.3/(1.72+12)1/2 = “2.7-sigma” is indicated. [By comparison, the radio spectrum recorded by SRBL just after this burst crossed location threshold yielded (xB,yB) = (−19.4',3.8') ± 1.1', giving (xB−xQ,yB−yQ) = (−12.8',6.1') ± 1.7', which is 2.9' distant, for a 1.5-sigma discrepancy. A tendency for early spectra to yield better location accuracies has been noticed in several other bursts.] These results are depicted in Figure 7. Figure 7. Locations calculated from the spectra of Figure 8, placed on a scale image of our sun. Error circles are shown with respect to the boresite; uncertainties for (xB−xQ,yB−yQ) must be added in quadrature from (xQ,yQ) and (xB,yB). 41 Figure 8. A burst recorded at OVRO on 3 June 2000 at 19:19:07 UT. Upper panel: raw spectra for the Cold sky, Quiet sun plus Cold sky, and Burst plus Quiet sun plus Cold sky. Middle panel: (B+Q+C) − (Q+C) as measured and after removing fitted modulations. Lower panel: (Q+C) − C. 42 Before discussing resolutions, further details will be presented of the algorithms used during patrol and calibration. These include ways of averaging quiet-sun spectra, deciding when bursts have occurred, and measuring modulation parameters. Patrol During patrol, the sun is held in view while SRBL's receiver cycles through 120 frequencies, chosen among those for which gain factors exist. Around 85 of these are in the 2 − 18 GHz range, and are somewhat logarithmically spaced. Attenuation is dynamic, to keep fluxes on-scale. A reference noise diode constantly toggles on and off, doubling the time needed to acquire each complete spectral record. Noise-diode signals are averaged with a 10 minute folding constant, allowing gain drifts to be tracked (at every frequency independently) on time scales comparable to typical burst durations. Quiet-sun plus cold-sky signals at each frequency n, SQCn are accumulated as weighted averages of SQCn−1 plus the latest measured fluxes Sn: SQCn = [e−1/tSQCn−1+k(1−e−1/t)Sn]/(e−1/t+k−ke−1/t), where t counts the number of records folded together (building from 0 to 60 as a patrol starts, then staying fixed, equivalent to a ~10 min time constant), and k = 0, 1/2, or 1 depending on whether a burst is in progress, the solar state is ambiguous, or a quiet sun prevails. The intensity variance V SCn is accumulated similarly. Status assessment logic is as follows: - If 0.85 < Sn/SQCn < 1.15 for >90% of the frequencies sampled, then the sun is quiet. - If Sn−SQCn−Atm > 50 sfu for >30% of the frequencies sampled, then a flare is active. - If Sn−SQCn−Atm > 500 sfu for >30% of the frequencies sampled, then a burst is active. - If none of the above, then there is ambiguity. Also, if t < 60, then k is forced to unity and no events can be declared until a “quiet” sun has been established. “Atm” is a contribution to S n−SQCn due to transient atmospheric absorption: estimated as A3, where A is the average of (Sn−SQCn)/3 above 10 GHz. By “burst” is meant an event large enough to try locating. As more records accumulate for each burst, a weighted average of (xB,yB) is kept, discarding outlying data. Calibration Feed phases must be determined and (X,Y) & W measured beforehand. This neccesitates a special run, which views the quiet sun from angles of 0, ±0.25, ±0.5, ±1, and ±2 degrees in azimuth and elevation separately. The cold-sky is sampled at beginning and end with an elevation offset of +20 degrees, chosen to be larger than 2W at 610 MHz. While this “trajectory” proceeds, SRBL's receiver cycles through all 596 standard frequencies plus 4 YIG-switch pauses. (It takes 30 minutes to take data.) Attenuators are fixed to particular values for different frequency ranges. The noise diode is held off. A usable dwell time of 48 seconds per offset is kept, so 1200 measurements are taken, giving 2 samples to compare at each frequency. These are corrected for pedestals, non-linearity, and attenuation based on parameters derived from a just-prior gain calibration (which itself takes 30 minutes). Variances are computed. Outliers are not eliminated. During analysis, an interpolated cold-sky background is subtracted at each offset. Intensities should therefore vary as exp[−(x−X)2/2Wx2]exp[−(y−Y)2/2Wy2], where (x,y) = (xQ+x',yQ+y') for commanded offsets (x',y'), with y'=0 (x'=0) for azimuth (elevation) scans. (Note, limb brightening can be ignored, since the beamwidth is so large.) The problem is then linearized, and signals S n corresponding to angles An are fit by lnSn = a+bAn+cAn2, ignoring An where less than 1/4th of the maximum signal is observed. Peak offsets (x,y) = (xQ−Xn,yQ−Yn) and beamwidths (Wx,Wy) are thereby obtained for every frequency. 43 To separate (xQ,yQ) from (X,Y), frequencies are first converted to phases: = 2[a+bln+c(ln)2], with (a,b,c) derived from earlier measurements. Then successive groups of (x,y) spanning periods of are fit by (xQ+Cxcos+Sxsin, yQ+Cycos+Sysin). Mean W and (X,Y) are written to a plottable reference file, returning plots like that in Figure 4, left-hand side. Frequencies with malformed Gaussians, too many bad measurements, or outlying (X,Y) are eliminated. Estimated 2-dimensional signal peaks (with units of channels) are also written to file, and later compared with concurrent quiet-sun fluxes reported by RSTN (where units are in sfu), thus establishing gain factors. Resolution Recall that 2W2ln(S0/S) = (x−X)2+(y−Y)2. Treating S0, (X,Y), and W as well known parameters, an error expression for x may be derived: (x−X) 22x ≈ W4(F/S)2, where F/S is the relative flux resolution, which is typically around 5% for most frequencies between 2 and 18 GHz. Overall, x is found by computing [∫218(S/x2)d/∫218Sd-1/2, includung a sum of inverse variances for all , weighted by S. As an estimate, assume a flat spectrum and calculate ∫218dln/x2ln9. For comparable x and y, location uncertainties are r ~ 5'(1+50r2)−1/2, with the offset r measured in degrees. In arriving at this expression, approximations X (1/)cos and W 5/ are used. On-axis sources (r = 0) give r ~ 5' per record, whereas solar-limb sources yield about half that. With pointing that is close to sun-center for at least 10 minutes (~60 records), Q ~ 0.6' errors may be expected for pre-burst sun locations. However, 1' is always included as an estimate of systematic uncertainty. Actually, since signal-to-noise ratios are usually worse for quiet-sun spectra, Q is often larger than 1.5'. Adding this in quadrature with similarly figured burst location errors, B, yields final uncertainties of 5' (or ~3') per record for sun-center (or solar-limb) events. More then one minute (>6 records) of accumulated good data should be needed to obtain 2' resolutions. Location uncertainties depend directly upon flux resolutions and spectral shapes. More subtle dependencies appear in the handling of calibrations, sampling, irregularities, etc. The following influences degrade performance further. SRBL's antenna is commanded every ½ second with new pointing coordinates, in step sizes of 1/500th of a degree. In calm weather, and with a rigid structure, such angular variations would translate to tiny relative flux errors of 1−exp(−0.002 2/2W2) ~ 0.001% at ~10 GHz. This antenna jiggles a little with every pulse of the motors, yet even ~1 mm motions at the feed (~5') introduce flux uncertainties of only ~1.4%. Wind can shake the structure much more violently. Such dishes act as effective sails, warping and fluttering in heavy breezes. The Yagi catches gusts, jerking on the spiral feed. Errors rapidly worsen, reaching 5% at 10 GHz for ~2 mm wobbles, effectively guaranteeing location uncertainties over 5'. Slow effects like the passage of clouds and gentle rain do little damage. Sleet or lightening are devestating however. Electromagnetic interference takes many forms, always damaging. These include single spikes, hash across several frequencies, broadband jumps, etc. A naive estimate would suggest that if 20% of the spectrum were affected by EMI, then location uncertainties would only rise by a factor of 1.2 1/2. But since x varies in proportion with W2, then modulation fits improve with the square of frequency; i.e. the upper ends of burst spectra are more important. As if to counter this trend, flux resolutions are found to be coarser at higher frequencies. In the above example from 3 June 2000, spectra became more erratic above 10 GHz. This was due in part to the poor characteristics of OVRO's prototype receiver; with gain factors exceeding 10 sfu per channel; i.e. signal variations of a few channels resulted in wildy changing “measured” fluxes. In addition, the actual burst spectrum apparently included a dip between 7 and 8 GHz, which is similar in width to modulations there, confusing the fit a little. 44 Improvements The following are possible ways to enhance SRBL location capabilities. These are categorized as dealing with calibration or patrol data, and grouped by approach. Counter arguments are presented in brackets. This is an ongoing research and development process; it is unlikely that every approach has been contemplated. 1. Calibrations: 1.1 Altering the trajectory or sampling scheme to improve data quantity and/or quality: 1.1.1 Sample more offsets. Alter the trajectory to reduce the distances moved, and dwell long enough to acquire just one sample at each frequency. Keep the total elapsed time below 30 minutes to avoid weather changes, gain drifts, etc. [But it is unclear whether, say, twice as many measurements, each half as precise, will result in improved Gaussian fits.] 1.1.2 Take more samples at each frequency, to eliminate stray points. An additional 8 minutes would provide a third sample at each offset, and allow some poor measurements to be recognized. [But we might do as well by ignoring outlying values among the pair of measurements taken now.] 1.1.3 Perform gain stabilizations while taking data. [This increases acquisition time, and might not help in any case.] 1.2 Avoid, fix, or eliminate irregularities in (X,Y) and W. Beyond measurement noise, (X,Y) and W should vary slowly with frequency. Except for phase and minor amplitude adjustments, X and Y should replicate one another and not differ when feeds are changed or later calibrations run. But irregularities are observed: outliers: single-point deviations from smoothness wiggles: small, rapid deviations from (X,Y) sinusoids or W flatness jiggles: period-doubled oscillations in X2+Y2, due to astigmatism in feed geometry/response tilts: uncomfortably significant amplitude differences between X and Y Outliers are often due to bad data (e.g. poor measurements at particular offsets) which yield differences in Gaussian fit parameters, but not bad enough to fall outside our tolerances. Wiggles may result from similar causes. Jiggles are of unknown origin. Tilts could indicate that our feed is astigmatic, or not perpendicular to the boresite axis. SRBL already smooths (X,Y) by fitting to Cxcos+Sxsin, but consider also: 1.2.1 Forcing (X,Y) and/or W to follow prescribed functional forms. [This was tried, and made matters worse.] 1.2.2 Shifting phase and amplitude to compare X and Y. [The astigmatism may be real, however, and should therefore be measured, not “corrected”.] 1.2.3 Comparing against “factory” templates which have all irregularities removed. Templates may be obtained by combining calibrations taken with each particular feed. Subsequent calibrations might take less time to determine only initial phases and systematic pointing offsets. There are likely to be no aging effects of concern. 1.3 Other issues. 1.3.1 What damage is done by assuming a particular phase/frequency relationship? For any particular feed, a calibrated correspondence should be OK. [Does the same parameter set characterizes other feeds?] 1.3.2 Smooth out 2D peak flux differences to get better gain factors. Peak fluxes display large variations between frequencies. These may just be due to sensitivities in the Gaussian fitting algorithm. [First, check if smoothing yields better solar flux precision.] 1.3.3 Do a cross correlation of peak spectra with the cold-sky and noise diode spectra taken during calibration to recognize artifacts, outliers, etc. 45 1.3.4 Do a Fourier analysis of calibration spectra, and strip off components not at frequencies corresponding to modulations. 2. Patrol: 2.1 Guide or track differently 2.1.1 Lock onto sun-center using an external optical guider. If (xQ,yQ) = (0,0) was guaranteed, then calculating burst locations would be simpler and more precise. Consider dynamic feedback in real time using an external guider whose relationship to the boresite has been established. A lens and quadrant cell might be used. [Clouds present an obvious difficulty. Signal assessment must be very sophisticated just to deal with times when the sun is only partially obscured. A radio guider does not exist.] 2.1.2 Move off-center to locate quiet-sun-center or bursts. Track the quiet sun at a limb, rather than oncenter. When a locatable burst occurs, snap to a point one solar radius away, losing one block of data during the movement. [But this is complicated, and other difficulties will probably result.] 2.1.3 Dynamically re-center using quiet-sun pointing offsets. Write a file which tracks quiet-sun pointing offsets, which might reproduce closely every day except for slow drifts related to changing seasons. Fit each days’ measurements, avoiding outliers, bad fits, etc., and update alignment parameters in the antenna steering program. Pointing should improve each day. If a burst occurs, then fit the preceeding sun-center offsets and extrapolate in time. In real-time, adjust tracking to re-center our pointing based on quiet-sun locations, but try to avoid jitter. 2.1.4 When a burst occurs, start scanning (guided by modulation fits) to "peak up" on it, improving signal-to-noise, and using our beamwidth to locate it in parallel with the usual algorithms. [This would have to happen quickly, and may result in messy spectra, taken during movements.] 2.2 Sample differently. 2.2.1 Integrate longer at each frequency to improve signal-to-noise. [However, it is not clear that random noise dominates flux resolutions. It would take longer to cycle through all patrol frequencies, so timing precision will degrade.] 2.2.2 Sample more frequencies. This allows more liberal elimination of poorly measured or badly fit data. [It would take longer to cycle through all patrol frequencies, so timing precision will degrade.] 2.2.3 Go from one cycle of 120 frequencies to 5 cycles of 24 frequencies, thus gain timing resolution. [But location accuracy could suffer. It is best to sample all frequencies within each modulation period as close as possible in time, rather than to take samples as much as 5 seconds apart.] 2.2.4 Sample more densly at the upper end of burst spectra. At present, SRBL tunes to about twice as many frequencies from 2 to 8 Ghz as above 8 GHz. If there is enough high-frequency spectral power in typical bursts, then locations are improved by inverting this distribution. [The voting scheme for burst detection must change. Broad, high frequency RFI would be more detrimental than now.] 2.3 Treat spectra and/or fit differently. 2.3.1 At present, SC is not adjusted for gain drifts during the day. 2.3.2 Smooth SC to eliminate spectral fluctuations that are always added, or ignore S C entirely, since it should be unmodulated. 2.3.3 Use different fitting algorithms. 2.3.4 Weight the variances or a2+b2 with inverse uncertainties as they are accumulated, before assesing the best grid point. 2.3.5 Use calibration fitting uncertainties to downplay poorly known parameters. Incorporate calibration uncertainties into the weights used when fitting locations, and thus avoid imprecise (X,Y) or W. 2.3.6 Fix spectral irregularities. type of irregularity possible cause spikes: isolated bad points RFI 46 hash: multiple incoherent nearby points broad RFI breaks: sudden shifts of many nearby pts electronics, software effects wiggles: coherent bumps or dips wind shake, fast gain drifts drifts: broad distortions gain drift, sky changes [But there is no way to approximate the complete underlying spectrum. Even many-order polynomial fits do not accommodate the range of variations seen, including multiple peaks, jagged gain discontinuities, etc. Instead, spectra must be treated piecemeal, generally within each period, but how?] 2.3.7 Get burst locations from summed spectra, rather than each record separately. Cumulative spectra acquire progressively better signal to noise. [But opportunities for refinement are lost; e.g. eliminating bad records or evaluating locations just during event peaks.] 2.3.8 Do a Fourier analysis of patrol spectra, and strip off components not at frequencies corresponding to modulations. Pointing A short, dense description of a related scheme is presented below. This takes advantage of the same principles as those used to locate bursts, but now to measure boresite-sun offsets quickly, within one minute... Observe quiet-sun signals Sij at four frequencies i and four locations (xj,yj) = (xQ+x'j,yQ+y'j), where (xQ,yQ) are boresite-sun displacements and (x'j,y'j) are commanded offsets; i.e. Sij = Siexp(−2ij/2W2i) with Si the unmodulated signal, Wi = /i (with 5) and 2ij = (xj−Xi)2 + (yj−Yi)2 where (Xi,Yi) = p(cos,sin)/i are feed offsets (with p 1), = (x'j2+y'j2) + [(xQ−Xi)2+(yQ−Yi)2] − 2[x'j(xQ−Xi)+y'j(yQ−Yi)] = 2W2i(lnSi − lnSij). If the four locations lie along pure (az,el) offsets, then (x'1,y'1)=( a, 0) => a2 + [(xQ−Xi)2+(yQ−Yi)2] − 2a(xQ−Xi) = 2W2i(lnSi − lnSi1) (x'2,y'2)=( 0, a) => a2 + [(xQ−Xi)2+(yQ−Yi)2] − 2a(yQ−Yi) = 2W2i(lnSi − lnSi2) (x'3,y'3)=(−a, 0) => a2 + [(xQ−Xi)2+(yQ−Yi)2] + 2a(xQ−Xi) = 2W2i(lnSi − lnSi3) (x'4,y'4)=( 0,−a) => a2 + [(xQ−Xi)2+(yQ−Yi)2] + 2a(yQ−Yi) = 2W2i(lnSi − lnSi4); i.e. (xQ−Xi,yQ−Yi) = W2i(ln(Si1/Si3),ln(Si2/Si4))/2a. If in addition, the four frequencies are 90º apart on one feed cycle, chosen without regard for initial phase, then (X1,Y1)=p( c, s)/1 => xQ − pc/1 = 2ln(S11/S13)/2a21 & yQ − ps/1 = 2ln(S12/S14)/2a21 (X2,Y2)=p(−s, c)/2 => xQ + ps/2 = 2ln(S21/S23)/2a22 & yQ − ps/2 = 2ln(S22/S24)/2a22 (X3,Y3)=p(−c,−s)/3 => xQ + pc/3 = 2ln(S31/S33)/2a23 & yQ + ps/3 = 2ln(S32/S34)/2a23 (X4,Y4)=p( s,−c)/4 => xQ − ps/4 = 2ln(S41/S43)/2a24 & yQ + ps/4 = 2ln(S42/S44)/2a24 xQ = 2[ln(S11/S13)/1 + ln(S21/S23)/2 + ln(S31/S33)/3 + ln(S41/S43)/4]/2a(1+2+3+4) yQ = 2[ln(S12/S14)/1 + ln(S22/S24)/2 + ln(S32/S34)/3 + ln(S42/S44)/4]/2a(1+2+3+4) This is a sum over i of ln(Sij/Sik), with weights i and overall scale 2/2a. Accuracy may be improved by weighting each ln(Sij/Sik) with i(Vij/S2ij+Vik/S2ik) instead, where Vij are variances on Sij, and then dividing by the sum of these weights. Operating around 5 GHz and with a = 1º should give a 4º “reach”. Allowing 4 seconds for slewing between locations and 1 second timing errors before and after 4 second data acquisitions (i.e. 25 samples per frequency) at each offset, the total time required for the trajectory is 40 seconds. Synchronizing data transfer and analysis takes several more seconds. 47