Exercises on RTSD, 5
advertisement

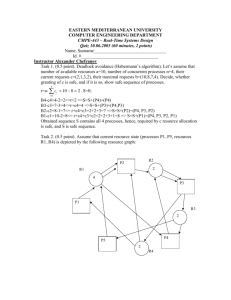
Exercises on RTSD, 5.06.03 1. Deadlock avoidance (Habermann’s algorithm). Let’s assume that number of available resources a=10, number of concurrent processes n=4, their current requests c=(2,2,3,1), their maximal requests b=(4,4,5,3). Decide, whether granting of c is safe, and if it so, show safe sequence of processes. For deciding, whether granting of resources is safe we are to find safe sequence S of 4 processes, if it exists, granting is safe, otherwise – not safe. We start with empty sequence S=0. Then we are to extend it by some processes step by step. If next step will give no extension, it means that sequence is not extendable, and granting is not safe. For extending we are to compare maximal additional requirement with available number of free resources r (r=a- sum of all components in c = 10-2-2-3-1=2) plus sum of resource units freed by processes preceding current in sequence S. We start with empty S, so for the 1st process, which is to be included in S, there are no preceding processes and we are to compare its additional resources requirements just with r: B1-c1=4-2=2<=r=2? Yes =>S=(P1), we have included P1 in S. Next consider 2nd process: B2-c2=4-2=2<=r+c1=2+2=4? Yes =>S=(P1,P2). Consider 3rd process: B3-c3=5-3=2<=r+c1+c2=2+2+2=6? Yes =>S=(P1,P2,P3). Consider last process: B4-c4=3-1=2<=r+c1+c2+c3=2+2+2+3=9? Yes =>S=(P1,P2,P3,P4) it is full sequence of all processes, hence, granting of resources c to processes is safe, and in the case of actual requesting by them additional resources, we can satisfy all if we shall grant additional resources in the sequence defined by S: at first, serve all requests of process P1, after its termination serve P2, and so on. 2. Deadlock detection by usage of resource graph. Assume that current resource state is depicted by the following resource graph: R2 P2 2 R1 3 P3 P1 R3 2 P4 P5 2 R4 On the draw above we have representation of resource graph for the system of 5 processes P1,.., P5, and set of resources of 4 types R1 with 3 units of resources available, R2 – 2 units, R3 – 2 units, R4 – 2 units. Arrow from process to resource means request for 1 unit of respective resource type, arrow from resource to process means granted 1 unit of respective resource to respective process. Detect, whether this current resource situation has a deadlock. For deadlocks detection we shall use reduction of resource graph on processes sequentially, step by step. For each process we shall either eliminate all incident to it edges, either non will be eliminated. We may eliminate incident to process edges only in the case if all its requests are already satisfied, or can be satisfied (for processes having some resources). If process has not yet resources, it can’t affect on deadlock arising, and all incident to it edges may be eliminated. So, process P5 is without granted to it resources, and only 1 edge (request for resource R1) may be eliminated. If after reduction, we shall not have edges, it will mean that there are no deadlocks. If some edges will remain, they are incident to processes that are in the deadlock loop. So, we can eliminate edges incident to P1. After that we may eliminate edges incident to P3 (1 unit of resource R4 now is free). Then we may eliminate edges incident to P2 (both units of resource R2 are now free). Then we can eliminate edges incident to P4 (2 units of resource R2 now are free). Hence, no edges will remain in our graph after such reduction, we may conclude, that there are no deadlocks in this situation. 3. Build tasks waiting graph using resource graph from Exercise 2. Examine it on deadlocks existence. Tasks waiting graph (TWG) is a graph having nodes-tasks, it may be obtained from resource graph by elimination of resource nodes, and connecting by edges nodes which are in the relation of waiting for locked resources. So, nodes T1 and T2 are to be connected with edge directed from T1 to T2, if T2 holds resource, necessary to T1 (in other words, T2 blocks T1 by using some critical resource requested by T1). Resource graph has information about granted and requested resources, and TWG may be easily obtained. P2 P3 or P1 P5 P4 We have that P5 is not blocked. P1 is not blocked (there is a free unit of resource R1). P2 is blocked by P3 (pr holds 2 units of resource R2, requested by P2). P3 is blocked by P1 or P2 (each of them holds 1 unit of resource requested by P3). P4 is blocked by P3 (P4 requests 1 unit of R2 both units of which are captured by P2). In this picture we have a loop (P2,P3), which corresponds to deadlock situation. So, our previous conclusion of absence of deadlock contradicts to the description shown by TWG: we have processes P2, P3 in a deadlock – P2 requires resources captured by P2, and P3 requires resources captured by P2. But actually, there is no deadlock, because P3 requires 1 unit of resource R4, one unit of which is used by P3, and other – by P1. So, P3 is locked either by P1 or by P3. If any of them will release resource, P3 will be able to develop. P2 is locked by P3, but P1 is not locked by any process, and after releasing resources by P1, P3 will develop, and then P2 may develop. So, for deadlock detection, in the case of alternative edges (locking), for deadlock existence, we are to have loop in each alternative. 4. Consider priority preemptive system of 4 processes, patterns of whose work are give in the table below Process Priority Execution Release time sequence A 1 EQQQQE 0 B 2 EVQE 2 C 3 EEVE 2 D 3 EQEE 4 Assume that more priority (important) process has larger value of priority. Release time means time of issuing request for execution of respective task. Execution sequence corresponds to the sequence of actions which are to be made by the process in each quantum of processor time: E means just execution without usage of critical resources, V,Q – means that in respective time slices task must critical resource V or Q. Draw a time diagram representing execution of these processes. D P E E b b b b b Q E E C E E V E B P P P P P E V b b b P P P Q E A E Q P P P P P P P Q Q Q P P P P P E 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 Row at the bottom shows time units (counts up to 5). Response times for processes are: A – 18, B- 15, C – 4, D – 11. 5. In conditions of Exercise 4, use Original Ceiling Priority Protocol (OCPP) to draw time diagram of execution of the same system of processes. OCPP locking policy assumes that in addition to static priority each process may have dynamic priority depending on priorities of blocked by it processes: it inherits highest priority of blocked by it processes. Process is blocked when it requires critical resources, used by other processes, or may be not used but locking policy may not allow to use some resource, if the priority of requesting process is not high enough. This is the case of OCPP policy. It assumes that each resource has static value – ceiling - maximum of static priorities of processes which are to use this resource. Process can lock resource only if its dynamic priority is higher than ceiling of any currently locked resources. So, let’s consider execution of the system of processes from Exercise 4 under OCPP locking policy: D B B B P P E Q E E C E E B B B V E B P P B B B P P P P P P E V Q E A E Q P P Q Q Q P P P P P P P P P P E 1 2 3 4 5 1 2 3 4 5 1 2 3 4 5 1 2 3 At first, as previously will run process A, and it will capture resource Q (ceiling of Q is 3, dynamic priority of A is 1, but there are no locked resources yet). At moment 2 will arise 2 requests, and A will be preempted. At moment 4 will arise new request for task D, and also at this moment task C will require resource V, dynamic priority of C is 3, but resource Q is now locked and its ceiling is 3, which is not less, than priority of C, hence C will be blocked by process A. All processes, excepting A, are blocked, so A is resumed, it works for 3 units of time with a dynamic priority 3, then it releases resource Q, its priority falls to 1, it is preempted now, and process C is resumed. After termination of C, D is activated, after its termination – B is activated. After termination of B, A is resumed and terminates after 1 time unit. Response times for processes are: A – 18, B- 15, C – 7, D – 9. Other locking policy – Immediate Ceiling Priority Protocol (ICPP) – also uses ceilings, associated with resources in the same way as for OCPP, also processes have dynamic priorities, but now it is maximum of ceilings of locked by it resources. Process with larger dynamic priority preempts processes with lower priority. For previous example, when process A will capture resource Q, its dynamic priority will become equal to 3, and it will not be preempted by process C at moment 2.