Integral Momentum Theorem:
advertisement

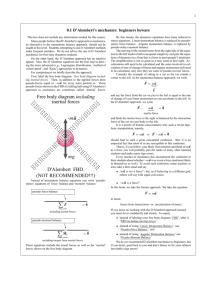
Integral Momentum Theorem We can learn a great deal about the overall behavior of propulsion systems using the integral form of the momentum equation. The equation is the same as that used in fluid mechanics and in air-breathing propulsion. The momentum theorem is an expression of Newton’s 2nd Law: F dt mV d 1 We want to look at this expression in a form that is most relevant to propulsion studies. To do so, consider the two coordinate system show in the figure below: (1) Inertial Coordinate System (labeled with subscript ‘I’ in the figure. (2) Fixed to the Vehicle (labeled with subscript ‘V’ in the figure. This coordinate system moves with a velocity uo relative to the inertial coordinate system. All velocities relative to the vehicle-fixed coordinate frame are denoted by u. ZV uo ZI XV XI YV YI Newton’s 2nd Law for a control volume of fixed mass can be expressed as: Du o u F Dt dV V 2 We can also write this as: F = ao dV + V All external forces on control volume (pressure forces, shear forces, body forces) Force due to change in inertia for accelerating vehicle Du Dt dV V Change in momentum of mass in control volume 3 Fo We can explain this equation further, by considering a simple example of a falling block and examining the application of two different control volumes. 1 mao 0 ma Du F ao dV Dt dV V V Du 0m Dt ma As expected, the result is the same for both. The integral momentum equation reduces to the familiar form, F=ma. Equation 3 is exact and completely valid for propulsion system applications. What we want to do now, and this is what is often lost in many derivations, is to make it easier to use for rocket and propulsion system applications. To do so, we’ll rearrange some of the terms in equation 3 and put them in a useful form. What follows is a lot of vector algebra and elementary vector calculus. Please keep in mind as you go through this what the goal is: simplify the equation for utility to propulsion applications. It is still F=ma, just in a different form, and knowing what the expressions of this alternate form are important. To continue, equation 3 can be written as follows: u F Fo t u u dV V u u u u u dV t t t V u u u u dV t t V 3.a 3.b 3.c Why did we do all this? In this form we can apply conservation of mass, in differential form. The general form of conservation of mass (for incompressible, compressible, nonconstant density flows) can be written as: u 0 t u u u 0 t 2 4.a 4.b In equation 4.b, we just multiplied the mass conservation equation by u to match the form of equation 3.c. We can now substitute to arrive at: u F F o V t u u u u dV 5 Remember that this is a vector equation. Most rocket problems that we will encounter only need to consider one-dimension (along the rocket’s primary line of travel), so examine the x-component of equation 5: F x u x Fox u x u u u x dV t V u x u y u u ˆj u x y u x x iˆ u x t x y y V 6 u u u kˆ u x x iˆ u y x ˆj u z x x y z kˆ dV u x u y u y u u u u u x x u x x iˆ u x u y x ˆj u x u z x kˆ dV x x y y y z t V u x u x u dV t V Now, one last step and we obtain at the most common and useful form for propulsion and fluid mechanics. This last step is the application of the divergence theorem. ˆ A dV n A dS V 7 S Finally we have the form of the momentum equation that we want. F x Fox Sum of forces acting on control volume = u V t x dV Change in momentum of mass contained in control volume over time + u u nˆdS x 8 S Change in momentum flux across surface of control volume One of the most common simplifications is the case of steady flow, with no acceleration: F u u nˆ dS x x S 3 9 Below equation 8 we noted what the terms in these equations mean. Here we list exactly what these terms are and some important items to remember when solving problems using equations 8 and 9. ux is the velocity relative to an inertial frame. The quantity (u (dot) n) is the outward normal velocity relative to the control surface. We could also write the momentum equation for a moving control volume as: ˆ u dV u u u n dS F cs S t V 8.a Again, note the significance of the two velocity terms in the momentum flux across the control surface. If we have a moving control volume, u, is the velocity of the matter cross the control surface measured in the inertial frame. The quantity (u-ucs) (dot) n is the velocity relative to the control surface. Of course if ucs = 0, then equation 8.a reduces to equation 9. In the volume integral, u, is again measured in the inertial frame. 4




![Eng_2100_final_project[1]](http://s3.studylib.net/store/data/006636520_1-c564c5e6c3357f36de4c65ebb2418a03-300x300.png)