7-62
advertisement

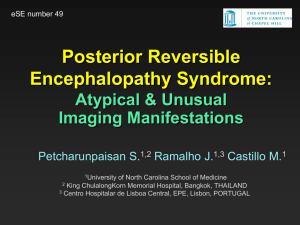
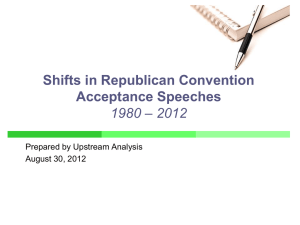
HIBRID JOURNAL BEARINGS WITH POINT INJECTION PORTS V. Nosov, J. Gómez-Mancilla, I. Ramírez-Vargas Instituto Politécnico Nacional IPN, Vibrations & Rotodynamics Lab, Zacatenco, México, D.F. MEXICO Abstract. This work deals with modeling and determination of the stationary eccentricity and attitude angle for a short journal bearings with single external pressurization injection port located at an arbitrary point. In case of hybrid journal bearings, both hydrodynamic and injection force are simultaneously considered in Reynolds Equation. Modeling of the point injection port is performed using a Dirac spatial delta function. The resulting pressure field is given by an analytical expression allows determining (also in analytical form) the pressure force components, equilibrium eccentricity and attitude angle. Special cases which correspond to an injection port located at the upper or lower part of the journal bearing are analyzed. 1. INTRODUCTION One of the main problems in rotating machinery is related with instability and excessive vibrations of different parts which conduct to premature wearing and severe damage of the equipments. One way to attenuate and to control vibrations existing in rotating machinery is the use of the external pressurization by means of some injection ports (1,2). The first step in the study of this phenomenon is a correct modeling of the dynamic behavior for the externally pressurized journal bearings and also a correct determination of its main static and dynamic characteristics. When an hydrodynamic journal bearing is externally pressurized, it is possible to modify the dynamic properties of the oil film, decreasing the instability velocity and vibration level (1). Nowadays there are companies dedicated to the manufacturing and experimental researches of externally pressurized rotating equipment, one of these is BENTLY-NEVADA CORP (2), which proposes to use 4 symmetrically situated injection ports for external pressurizing of journal bearing. In this paper we develop a principally new model of the point injection port based on spatial Dirac delta function ( x) (also called generalized Dirac function or Dirac distribution) which has special properties helping to study this model (7, 4). This concept has been proposed in our previous papers (4). The Dirac delta function is currently used in different physical problems to model point masses, point electrical charges, point sources and so on (4, 7). As we know, in rotodynamic problems Dirac delta function has never been used. Special properties of Delta function simplify the analytical solution of difficult problems related with externally pressurized journal bearings and permit to obtain some qualitative and quantitative characteristics of such bearings. These results can be useful to understand the process of pressurization and also they may be used in preliminary stages of pressurized bearings design. Also it is evident that our models of journal bearings based on delta function have theirs proper restrictions and cannot be consider as an universal model for all type of pressurization problems. 7-62 2. CLASSICAL OCVIRK SOLUTION FOR SHORT JOURNAL BEARINGS In this section some known result necessary for us from Ocvirk short bearings theory are given in condensed form. The well known Reynolds equation describing the pressure field in hydrodynamic bearings can be written in a following form (3, 5, 6, and 8): 3 p p R2 h R 2 h 3 12 Cr Cos C r ( ) Sin (1) z z Cr3 2 L L z , 2 2 L p( ) 0 , 2 0 θ 2π , h( ) 1 εCosθ (2) L p ( ) 0 , p( 2 ) p( ) , 2 (3) In (1)-(3) and below we always use the notations from (6). In this work, the main interest is connected with the short journal bearings approximation, which is valid for sufficiently little value of the ratio L/D. The Reynolds equation for short journal bearings in stationary state can be written as (3, 5, and 6): 3 p R2 2 h 12 Sin R (4) z z Cr2 2 Passing to dimensionless variables z L z,p 2 2 , pdim N R pdim p R 2 C r Cr 2 (5) transform Eq. (4) to the form: 3 p L h 12 Sin z z D 2 (6) The solution to (6) is (3, 5 and 6): 2 Ocv Sin L z 2 1 pOcv 6 3 D (1 Ocv Cos ) (7) Solution (7) is known as Ocvirk solution, and for this solution the relation between attitude angle Ocv and eccentricity in stationary position is given by (6): Ocv 1 2 Ocv 4 Ocv Ocv arcTan . (8) The pressure force components in the immovable coordinated system XOY (Fig. 1) are (6): 2 2 2 pres L 4 pres FX ,Ocv Fdim Cos pres Sin pres (1 2 pres ) 3 / 2 D (1 2 pres ) 2 FY ,Ocv L Fdim D Fdim DLP 2 4 2 pres 2 pres Sin pres Cos pres (1 2 pres ) 2 (1 2 pres ) 3 / 2 dim 7-63 (9) 3. NEW MODEL OF POINT PRESSURIZATION PORT Consider two systems of coordinates, XOY is a fixed and X´JY´ is a moving system. The point O in Fig. 1 is the center of the bearings and the point J is the center of the journal. The angle refers to the angle in the circumferential coordinate system X´JY´ as it is shown in Fig.1. Vectors U R and U T are unit vectors of the mobile rectangular system X´JY´, the axe Z is perpendicular to the plane XOY. The angle between the axes of the mobile system X´JY´ and the fixed system XOY is notated by pres and is called attitude angle. The angular position of the injection port is given by the angle in the fixed system XOY and by the angle pres in the mobile system X´JY´. Fig 1. Coordinate systems: XOY-fixed, XJY¨ – mobile, pres -attitude angle, – circumferential coordinate of the injection port in XOY system. Now let us consider the external pressurization point port situated in arbitrary position. Suppose the pressurization is performed by the injection in the point port with the axial dimensionless coordinate z a and the circumferential coordinate “ ”. Suppose also the surface of the port s is sufficiently small and the pressure surplus is p . The total pressurization force is equal: Fpres ps . Suppose now that s 0 , p in such a way that pressurization force guards its constant value: Fpres ps q const . . In this case we can model a punctual pressurization port using dimensionless pressure distribution given by spatial Dirac delta function (4) (p ) prt q prt ( z a) ( ( pres )), q prt Fpres DLpdim Fpres Fdim (10) Here q prt is dimensionless pressurization intensity, “ a ” is dimensionless axial position and “ ” is circumferential position of the injection port in the fixed coordinate system XOY .The above considerations can be also generalized to the case of injection in “n” arbitrary situated ports. Therefore, our mathematical model based on Dirac delta function can be used to represent the pressurization performed by injection through an arbitrary number of ports with sufficiently small surface. 7-64 Suppose now the pressure field for our model of pressurization through a point port is given by following Reynolds dimensionless equation with boundary conditions: 3 p L h q prt ( z a) ( pres ), z z D 1 z 1, 0 2 2 p ( z 1) 0, (11) p ( 2 ) p ( ) (12) Integrating Eq. (11)-(12), and using the properties of Dirac delta function we obtain the pressure field due to pressurization in the arbitrary positions in the form: L q prt ( pres ) 1 az abs( z a ) p pres ( , z ) 3 2(1 presCos ) D 2 (13) Solution (13) is defined in terms of Dirac delta function, thus it is not possible to draw in a simple way the pressure field. Nevertheless using an appropriate approximation of delta function we can give an approximation of pressure field. For example, suppose delta function is approximated by following function (7): ( pres ) n e n 2 ( pres ) 2 (14) In this case we have that total pressure field is equal to the sum of Ocvirk pressure (7) and the pressure produced by pressurization (13). The following approximate 3D presentation of total pressure field for n 10 in (14) is shown in the Fig. 2a and 2b. a) b) Fig. 2 Total approximate pressure field a) upper injection, b) lower injection for delta function replaced by (14) and a 0, n 10 , 180 ; S 4 , L D 1 4 , 0.3287 , 66.08 , q prt 5 / 2 , f prt 10 . Note that some integral characteristics of the pressure field in externally pressurized bearings (such as average pressure, force components and so on) can be easily calculated and drawing without any approximation of delta function. For example, the average pressure (over θ) for the pressure field given by (13) is equal: 2 q prt 1 2 1 L 1 az abs( z a) p prom p pres ( , z )d 2 0 4 D (1 presCos( pres ))3 7-65 (15) 4. PRESSURE FORCES COMPONENTS Now determine the pressurized force components. Vertical force component FX is defined in dimensionless form as FX Fdim 4 p( , z ) Cos( pres )d dz (16) Integrating over z and θ we obtain following expressions for both vertical and horizontal pressurized force components: FX , pres (1 a 2 )Cos( ) L Fpres D 8(1 presCos( pres )) 3 (17) FY , pres (1 a 2 ) Sin ( ) L Fpres D 8(1 presCos( pres )) 3 (18) 2 2 The total vertical pressure force component is equal to the sum of Ocvirk pressure force components (9) and pressurized force component (18): L FX , result FX , Ocv FX , pres Fdim D 2 4 2 pres 2 pres Cos pres Sin pres 2 2 2 3/ 2 (1 pres ) (1 pres ) (1 a 2 ) Cos ( ) L Fpres 3 D 8(1 presCos ( pres )) 2 (19) In the same way for horizontal component we obtain 2 2 2 pres L 4 pres FY , result FY , Ocv Fpres Fdim Sin Cos pres pres 2 2 (1 2 pres ) 3 / 2 D (1 pres ) (1 a 2 ) Sin ( ) L Fpres 3 D 8(1 presCos ( pres )) 2 (20) 5. EQUILIBRIUM ATTITUDE ANGLE AND ECCENTRICITY FOR PRESSURIZED BEARING The equilibrium attitude angle and eccentricity in pressurized short bearing is determined from forces balance equations: W FX ,result 0, (21) FY ,result 0, For one point port Eq. (21) takes form: 2 2 2 pres L 4 pres W Fdim Cos Sin pres pres 2 2 2 3/ 2 (1 pres ) D (1 pres ) (1 a )Cos ( ) L Fpres 0 3 D 8(1 presCos ( pres )) 2 2 7-66 (22) L Fdim D 2 4 2 pres 2 pres Sin pres Cos pres (1 2 pres ) 2 (1 2 pres ) 3 / 2 (23) (1 a 2 ) Sin ( ) L F pres 0 D 8(1 presCos ( pres )) 3 2 In general case Eq. (22) is a system of 2 nonlinear equations with respect to unknown equilibrium attitude angle pres and equilibrium eccentricity pres . In general case the solution of Eq. (22), (23) can be obtained only by numeric calculation 6. UPPER VERTICAL PRESSURIZATION PORT In this case system (22) can be solved analytically. For upper vertical port we have the angle and for lower port 0 . From (18) follows that in these both cases horizontal component of pressurization force is equal to zero: FYpres 0 . Thus the relation between equilibrium attitude angle pres and eccentricity same as in Ocvirk theory and is given by same relation (8): pres is just the Tan pres 1 2 pres (24) 4 pres Now using the first equation of the system (22) and replacing Cos pres and Sin pres by theirs expressions (3, 6) we can determine equilibrium eccentricity of the short pressurized journal bearings. Really: W L Fdim D 2 4 2 pres 4 pres 2 pres 2 2 2 (1 pres ) 16 2 pres 2 (1 2 pres ) (1 pres ) L Fpres D 2 (1 a ) 2 4 2 pres 8 1 2 2 2 16 ( 1 ) pres pres 3 2 (1 2 pres ) 16 2 pres (25) 0 2 Fdim NDL R Introduce now Sommerfeld number S . Note Sommerfeld W W Cr number S depends only on parameters of bearings and is independent to external pressurization. After some algebraic transformations Eq, (25) passes into: 2 2 2 3 (1 ( upper (1 a 2 )( upper D pres ) ) pres ) S f prt upper upper upper upper 2 3 pres pres L 8 ( pres 4( pres ) ) upper 2 2 upper 2 upper pres 16 ( pres ) (1 ( pres ) ) , f prt 7-67 (26) Fpres W , (27) For upper position of pressurization port the behavior of attitude angle and eccentricity given by (26) are shown in Fig. 3a). The eccentricity increases when the Sommerfeld number S decreases for all pressurizations and that for each value of Sommerfeld number corresponds one and only one eccentricity upper pres . Eq.(26) permits to obtain Sommerfeld number S as a function of eccentricity, pressurization and (L/D) value (in the region of Ovrick approximation validity). Remark that the attitude angle upper is just the same for a fixed eccentricity upper and different pres pres pressurizations. As to any Sommerfeld number S corresponds one and only one eccentricity it is possible to obtain eccentricity and attitude angle as a function of Sommerfeld number and pressurization. Performing spline interpolation of previous data, we obtain Table 1 where equilibrium eccentricities upper and attitude angles pres are given as a function of Sommerfeld number and pressurization. Note that the upper pres eccentricities upper and attitude angles pres have monotonic variation when pres pressurization increases. The importance of Table 1 is fundamental, it allows in a practical and easy way to predict the possible values of the real equilibrium eccentricity and attitude angle. It is clear that tables similar to Table 1 can be obtained also for any other value of (L/D), because Eq. (26) allows this modification. upper 7. LOWER VERTICAL PRESSURIZATION PORT If pressurization port is located in lower part of vertical axis when 0. In this case equilibrium eccentricity lower and attitude angle have a different behavior pres from the case analyzed above. In fact, if the pressurization vertical component force is bigger than the weight, FX pres W , when equilibrium position of the journal can lower pres displace in another coordinate quadrant. Thus, there appear two cases. Case 1. Pressurization Vertical Component Force is Less than Journal Weight, FX pres W . It is clear that there exist only one possible quadrant for the journal to be in equilibrium; it is the quadrant III. Taking into consideration the above figure and performing a force balance such as (22) it can be obtained the following relation: 2 lower 1 2 2 (1 ( lower (1 a 2 )( pres 1 ) 3 D pres ) ) S f prt lower1 lower 1 lower 1 lower 1 2 3 pres pres L 8 ( pres 4( pres ) ) Here FX p res (28) W , and so we have 2 lower 1 2 3 1 D 8 ( pres 4( pres ) ) lower (1 a 2 )( pres 1 )3 L lower f prt (29) Determine now the admissible values of pressurization in this case. Fig. 3a) shows right part of (29) as a function of eccentricity for ( L / D) 1 / 4 . It is clear that: D 0 f prt 128 8 L 2 . Fig. 3b) shows the dependence of Sommerfeld number on eccentricity given by (28) for several values of pressurization force. Fig.3b) shows a 7-68 physically clear fact that the eccentricity decrease when the pressurization force increase but is less that rotor system weight. Case 2: Pressurization Vertical Component is Bigger than the Weight FX pres W . In this case the pressurization force is higher than the weight of rotor system. In third quadrant III we have Cos 0, Sin 0 and we obtain: 2 lower lower (1 ( pres 2 ) 2 ) 2 (1 a 2 )( pres 2 ) 3 D f prt S lower2 lower 2 lower2 lower2 2 3 pres pres 8 ( pres 4( pres ) ) L (30) In this case f prt 128 . Eqs. (26), (28), and (30) are similar but mot identical. To indicate it we have used different notations for equilibrium eccentricity in these 3 cases. Fig. 3b) shows the dependence of Sommerfeld number (30) on pressurization force. a) b) c) Fig. 3. Sommerfeld number as a function of eccentricity for inferior pressurization: a) upper pressurization, b) lower pressurization, case 1, c) lower pressurization, case 2. Fig.3c) shows that in case 2 the eccentricity increase when pressurization increases. In this case the bearing has the behavior similar to hydrostatic bearing. 8. CONCLUSIONS Modeling which uses spatial Dirac function in the Reynolds equation gives a simple analytic way to determine the pressure field in short bearing which can be pressurized 7-69 by any number of fluid injection ports with arbitrary axial and circumferential positions. The dependences given in Fig. 3 between pressurization and eccentricity are calculated for special cases of upper and lower vertical position of point pressurization port Table 1 allows finding eccentricity values and attitude angle for given values of Sommerfeld number and for a different pressurization force or vice versa. This table can be used for prediction of equilibrium position in real situations. TABLE 1. UPPER INJECTION PORT, (L/D)=1/4. Eccentricity and attitude angle of a pressurized bearing with upper location of pressurization port for a given Sommerfeld number. f prt 0 f prt 10 f prt 20 f prt 50 f prt 100 upper pres upper upper pres pres upper upper pres pres upper upper pres pres upper upper pres pres upper pres 0.02 0.9397 15.82 0.9400 15.78 0.9403 15.74 0.9412 15.62 0.9426 15.43 0.05 0.9031 20.44 0.9037 20.37 0.9043 20.29 0.9062 20.07 0.9090 19.73 0.10 0.8624 24.85 0.8633 24.77 0.8641 24.69 0.8665 24.47 0.8701 24.11 0.20 0.8129 29.05 0.8146 28.88 0.8162 28.72 0.8205 28.30 0.8264 27.76 0.30 0.7706 32.91 0.7725 32.76 0.7743 32.61 0.7793 32.20 0.7865 31.60 0.50 0.7072 38.13 0.7099 37.92 0.7125 37.71 0.7197 37.14 0.7302 36.30 0.80 0.6375 43.49 0.6415 43.19 0.6452 42.91 0.6554 42.14 0.6696 41.05 1.00 0.6000 46.31 0.6047 45.96 0.6091 45.63 0.6209 44.74 0.6375 43.50 1.30 0.5522 49.85 0.5579 49.43 0.5633 49.04 0.5775 47.98 0.5971 46.53 1.50 0.5245 51.88 0.5309 51.41 0.5369 50.98 0.5526 49.82 0.5738 48.26 2.00 0.4660 56.14 0.4739 55.57 0.4811 55.05 0.5001 53.67 0.5249 51.85 2.50 0.4187 59.57 0.4277 58.92 0.4360 58.32 0.4574 56.76 0.4854 54.74 3.00 0.3793 62.42 0.3893 61.70 0.3984 61.04 0.4218 59.35 0.4523 57.14 3.50 0.3461 64.82 0.3567 64.06 0.3664 63.36 0.3914 61.54 0.4237 59.21 4.00 0.3176 66.88 0.3287 66.08 0.3389 65.35 0.3650 63.45 0.3989 61.00 5.00 0.2720 70.19 0.2835 69.36 0.2940 68.60 0.3217 66.59 0.3573 64.02 7.00 0.2092 74.75 0.2204 73.94 0.2308 73.19 0.2586 71.17 0.2956 68.48 8.00 0.1870 76.3 0.1974 75.61 0.2078 74.86 0.2350 72.88 0.2722 70.18 10.00 0.1538 78.78 0.1639 78.04 0.1731 77.37 0.1979 75.58 0.2340 72.95 15.00 0.1073 82.16 0.1155 81.56 0.1225 81.05 0.1412 79.69 0.1724 77.42 S ACKNOWLEDGEMENT This work was partially sponsored by the S.N.I. and the EDI scholarships granted by the CONACyT, and the Instituto Politécnico Nacional de México, IPN, respectively. REFERENCES 1. Fedor, J. V.: ´Journal Bearings with arbitrary position of source´ ASME Trans., Journal of Basic Engineering, 1961,26,187-198. 7-70 2. 3 4 5 6 7 8 Bently, D., Petchnev, A.: ´Dynamic stiffness and advantages of externally pressurized fluid film bearings´, Orbit, First Quarter, 2000,3-8 Szeri, A.: Fluid Film Lubrication, Theory and Design, Cambridge University Press, 1998 Ramírez Vargas, I., Nosov, V., Gómez- Mancilla, J.:´Campos de presión de lubricante en chumacera híbrida presurizada con anillo y/o línea unidimensional de presurización, 8° Congreso Nacional de Ingeniería Electromecánica y de Sistemas IPN, México, 2004 Khonsari, M. M., Booser, E. R.: Applied Tribology: Bearing Design and Lubrication, John Wiley & Sons, 2001. Childs, D.: Turbomachinery, Rotor dynamics: Phenomena, Modeling,& Analysis, John Wiley&Sons, NY, 1993 Arfken, A.: Mathematical Methods for Physic, Academic Press,5 Ed, 2000. Ocvirk, F.: ´Short Bearing Approximation for Full Journal Bearings´, NACA TN 20808, 1952 7-71