Chapter 1 Basic Concepts
advertisement

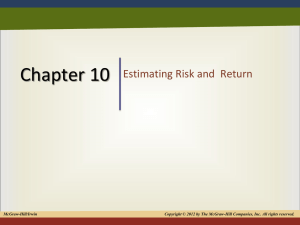
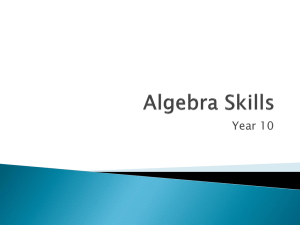
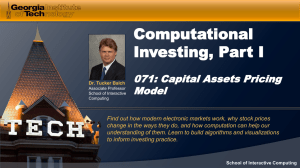
Chapter 1 Basic Concepts Thomas Bayes (1702-1761): two articles from his pen published posthumously in 1764 by his friend Richard Price. Laplace (1774): stated the theorem on inverse probability in general form. Jeffreys (1939): rediscovered Laplace’s work. Example 1: yi , i 1, 2,, n : the lifetime of batteries 2 Assume y i ~ N , . Then, p y | , 2 n 1 exp 2 2 n y i 1 i 2 t , y y1 , , yn . To obtain the information about the values of and , two methods 2 are available: (a) Sampling theory (frequentist): and 2 are the hypothetical true values. We can use 2 point estimation: finding some statistics ˆ y and ˆ y to estimate and , for example, 2 n ˆ y y y i 1 n n i 2 , ˆ y y i 1 y 2 i n 1 . interval estimation: finding an interval estimate ˆ1 y , ˆ2 y 1 and ˆ12 y , ˆ 22 y for estimate for and , for example, the interval 2 , s s , Z ~ N (0,1). y z , y z , P Z z 2 2 2 2 n n (b) Bayesian approach: 2 Introduce a prior density , for and . Then, after some 2 manipulations, the posterior density (conditional density given y) f , 2 | y can be obtained. Based on the posterior density, inferences about and 2 can be obtained. Example 2: X ~ b10, p : the number of wins for some gambler in 10 bets, where p is the probability of winning. Then, 10 10 x f x | p p x 1 p , x 1,2, ,10. x (a) Sampling theory (frequentist): To estimate the parameter p, we can employ the maximum likelihood principle. That is, we try to find the estimate p̂ to maximize the likelihood function 10 x 10 x l p | x f x | p p 1 p . x 2 x 10 , For example, as Thus, 10 1010 l p | x l p | 10 p10 1 p p10 . 10 ˆ 1 . It is a sensible estimate. Since we can win all the p time, the sensible estimate of the probability of winning should be 1. On the other hand, as Thus, x 0, 10 100 10 l p | x l p | 0 p 0 1 p 1 p . 0 ˆ 0 . Since we lost all the time, the sensible estimate of p the probability of winning should be 0. In general, as ˆ p xn, n , n 0,1,,10, 10 maximize the likelihood function. (b) Bayesian approach:: p : prior density for p, i.e., prior beliefs in terms of probabilities of various possible values of p being true. Let p r a b a 1 b 1 p 1 p Beta a, b . r a r b Thus, if we know the gambler is a professional gambler, then we can use the following beta density function, p 2 p Beta2,1 , to describe the winning probability p of the gambler. The plot of the density function is 3 1.0 0.0 0.5 prior 1.5 2.0 Beta(2,1) 0.0 0.2 0.4 0.6 0.8 1.0 p Since a professional gambler is likely to win, higher probability is assigned to the large value of p. If we know the gambler is a gambler with bad luck, then we can use the following beta density function, p 21 p Beta1,2 , to describe the winning probability p of the gambler. The plot of the density function is 1.0 0.0 0.5 prior 1.5 2.0 Beta(1,2) 0.0 0.2 0.4 0.6 0.8 1.0 p Since a gambler with bad luck is likely to lose, higher probability is 4 assigned to the small value of p. If we feel the winning probability is more likely to be around 0.5, then we can use the following beta density function, p 6 p1 p Beta2,2 , to describe the winning probability p of the gambler. The plot of the density function is 0.0 0.5 prior 1.0 1.5 Beat(2,2) 0.0 0.2 0.4 0.6 0.8 1.0 p If we don’t have any information about the gambler, then we can use the following beta density function, p 1 Beta1,1 , to describe the winning probability p of the gambler. The plot of the density function is 1.0 0.9 0.8 prior 1.1 1.2 Beta(1,1) 0.0 0.2 0.4 0.6 p 5 0.8 1.0 posterior density of p given x conditiona l density of p given x f x, p joint density of x and p f p | x f x marginal density of x f x | p p f x | p p l p | x p f x Thus, the posterior density of p given x is f p | x p l p | x r a b a 1 b 1 n n x p 1 p p x 1 p r a r b x ca, b, x p x a 1 1 p b 10 x 1 In fact, r a b 10 b 10 x 1 p xa 1 1 p r x a r b 10 x Beta x a, b 10 x f p | x Then, we can use some statistic based on the posterior density, for example, the posterior mean E p | x pf p | x dp 1 0 As xa a b 10 . xn, ˆ E p | n p an a b 10 is different from the maximum likelihood estimate n 10 . Note: f p | x p l p | x the original informatio n about p the informatio n from the data the new informatio n about p given the data 6 Properties of Bayesian Analysis: 1. Precise assumption will lead to consequent inference. 2. Bayesian analysis automatically makes use of all the information from the data. 3. The inferences unacceptable must come from inappropriate assumption and not from inadequacies of the inferential system. 4. Awkward problems encountered in sampling theory do not arise. 5. Bayesian inference provides a satisfactory way of explicitly introducing and keeping track of assumptions about prior knowledge or ignorance. 7