Calculation of Detection Probabilities Adapted from Burnham et al
advertisement

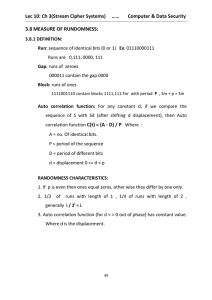
Mark-Recapture Maximum Likelihood Estimators adapted from Seber et al. 1982 (page 200) and Burnham et al. 1987 (page 114) for CJS models. R. Perry Updated: 2/22/2008 Definition of symbols i = detection site, i = 1, 2, …k, numbered from upstream to downstream where k is the maximum number of detection sites. mi = number of fish detected at site i. ri = number of fish detected downstream of site i (i.e., at sites i+1…k), of those detected at site i. zi = number of fish not detected at site i, but detected downstream of site i (i.e., at sites i+1…k). R = total number of fish released. Note: (ri + zi) = the total number of fish detected downstream of site i and therefore, known to be alive at site i. Estimated parameters ˆi = estimated survival probability from site i-1 to site i pˆ i Mˆ = estimated probability of detection at site i, conditional on the fish being alive at site i. ̂ i = estimated number of tagged fish alive at site i = k pk = estimated joint probability of surviving the last reach and being detected at the kth detection site. Maximum Likelihood Estimators The maximum likelihood estimate for detection probability, pˆ i , is: r pˆ i i ri zi and the standard error of pˆ i is: SE( pˆ i ) = pˆ 1 pˆ i i 2 1 1 ri zi 1 The maximum likelihood estimator of the survival probability ˆi is: ˆi Mˆ i Mˆ i 1 m r z where Mˆ i i i i ri Mˆ if i = 1 then ˆ1 1 R Mˆ mi and Var ˆi ˆi2 i ˆ M i 1 1 Mˆ i 1 mi 1 1 1 1 ˆi Mˆ i 1 ri 1 mi 1 Mˆ i ri mi when i =1 the variance formula reduces to: Mˆ m1 1 1 1 ˆi Var ˆ1 ˆi2 1 ˆ ˆ M r1 m1 M i 1 The maximum likelihood estimator of ̂ is: ˆ rk 1 mk 1 CJS Example I generated capture histories for a 2-occasion CJS model with true parameter values 1 = 0.85, p1 = 0.93, and = 0.80. Capture histories were generated for R = 378 fish by calculating the expected value of each capture history frequency as R*P where P is the probability of observing each capture history: Capture History (i) 111 101 100 110 ni 239 18 61 60 Statistics: R = 378 m1 = n111 + n110 = 299 r1 = n111 = 239 z1 = n101 = 18 Parameter estimates: r 239 pˆ1 1 0.93 r1 z1 239 18 m r z 299 239 18 Mˆ 1 1 1 1 321.3 r1 239 2 Mˆ 1 321.3 0.85 R 239 Mˆ m1 1 1 1 ˆ1 321.3 299 1 1 1 0.85 Var ˆ1 ˆ12 1 0.852 0.0003796 ˆ ˆ r m 321.3 239 299 321.3 M M 1 1 1 1 ˆ1 SE ˆ1 Var ˆ1 0.01945 ˆ rk 1 r 239 1 0.80 mk 1 m1 299 Note that the parameter estimates from the maximum likelihood estimators are the same as the true values used to generate the capture histories. Derivation of Maximum Likelihood Estimators for double-array detection probabilities The double-array model for calculating detection probabilities follows a multinomial model conditional of the fish observed at either detection array. The likelihood can be specified as: p1 1 p2 N L p1 , p2 | n10 , n01 , N n10 , n01 1 1 p1 1 p2 n10 p2 1 p1 1 1 p1 1 p2 n01 p1 p2 1 1 p1 1 p2 Where p1 and p2 are detection probabilities for each independent detection array, n10 is the number of fish detected at the first array but not the second, n01 is the number of fish detected at the second array but not the first, and N is the total number of unique fish detected at both arrays. The MLEs are found by taking partial derivatives of the log-likelihood with respect to each parameter, setting to zero, and solving for the simultaneous solution of the parameters. To simplify derivatives, the likelihood can be expressed as: N 1 n n L p1 , p2 | n10 , n01 , N p1N n01 p2N n10 1 p2 10 1 p1 10 N n10 , n01 1 1 p 1 p 1 2 The log-likelihood is then N log L log N log 1 1 p1 1 p2 N n01 log p1 N n10 log p2 n10 , n01 n01 log 1 p1 n10 log 1 p2 3 N n10 n01 Taking derivatives N p2 1 n log L N n01 01 0 p1 p1 1 p1 1 1 p1 1 p2 N p1 1 n log L N n10 10 0 p1 p2 1 p2 1 1 p1 1 p2 Solving this system of equations for p1 and p2 yields the following MLEs: pˆ1 N n10 n01 N n10 pˆ 2 N n10 n01 N n01 Note: Since N = n10+n01+n11 where n11 are fish detected at both arrays, the MLE’s can also be expressed as: pˆ1 n11 n01 n11 pˆ 2 n11 n10 n11 The overall detection probability is a function of p1 and p2: p = 1-(1-p1)(1-p2) References Burnham, K. P., D. R. Anderson, G. C. White, C. Brownie, and K. H. Pollock. 1987. Design and Analysis Methods for Fish Survival Experiments Based on Release-Recapture, American Fisheries Society Monograph 5, Bethesda, Maryland. Seber, G.A.F. 1982. The estimation of animal abundance and related parameters. The Blackwell Press, Caldwell, New Jersey 4