Document
advertisement

ST
1
CHAPTER
Special theory of relativity
1
ZCT 104/3E
1.
2.
3.
4.
5.
ENGLISH TEACHING
5 CHAPTERS WILL BE COVERED
Special theory of relativity
Wave nature of particles
Particle nature of waves
Introduction to Quantum Mechanics
Atomic models
2
LECTURE 1
Failure of Newtonian mechanics
Newton
3
Revision: Still remember
Newton's 3 law of motion?
1.
2.
3.
An object at rest will always be in the
wrong place
An object in motion will always be
headed in the wrong direction
For every action, there is an equal and
opposite criticism
=b, just joking
4
Newtonian view of space
and time
Space
and time are absolute
Time flow independently of the state of motion of
any physical system in 3-D space
In essence, time and space do not mix. The state
of motion of a physical system does not affact the
rate of time flow within the system
5
Inertial frames
Inertial frames of reference is one in which an
object subject to no forcess moves in straight
line at constant speed
E.g. of inertial frames: the lab frame and the
constant-speed car frame
Newtonian law of invariance (or called principle
of Newtonian relativity): All inertial frames are
equivalent, and the law of mechanics must be
also take the same methematical form for all
observers irrespective of their frame of
references
6
Example of inertial frames of reference
7
Example of form invariance
In the aeroplane with constant speed wrp
to the ground, Newton second law takes
the form of F’ = m a’
In the lab frame, Newton 2nd law is F =
ma
8
The laws of mechanics must be the
same in all inertial frames of
reference
Although the ball path
is different in both
inertial reference
frames, both
observers agree on
the validity of
Newton’s law,
conservation of
energy and others
physical principles
9
Galilean
It relates the kinematical
transformation
quantities, such
as position,
velocity, acceleration between
two inertial frames
S: stationary frame (uses x,y,z,t
as their coordinates)
S’: moving wrp to S with
constant speed u away from S
(uses x’,y’,z’,t’ as their
coordinates)
Galilean transformation for the
coordinates (in 1-D):
x’ = x – vt, y’ = y, z’=z, t’ = t
Galilean addition law for
velocity (in 1-D):
v’x = vx - v
Simply a daily experience
10
Galilean transformation and
Newtonian view goes hand-in-hand
Galilean transformation assumes the
notion of absolute space and time as hold
by Newton, i.e. the length is independent
of the state of motion. So is the flowing
rate of time.
11
Example
Apply GT on th previous
example
The trajactories of the ball
seen in the two frames, S’ (van)
and S (ground observer) is
related by GT as per
LT : t ' t ; y ' y; x ' x vt
1 2
r x(t ) xˆ y (t ) yˆ u xt xˆ v y 0t gt yˆ
2
(parabola trajactory of projectile seen in S)
r ' x '(t ') xˆ ' y '(t ') yˆ ' x(t ) u xt xˆ ' y (t ) yˆ '
1
1
[ u x t u xt ]xˆ ' v y 0t gt 2 yˆ ' v y 0t gt 2 yˆ '
2
2
(vertical straight line seen in S')
12
Example
Using Galilean transformation of corrdinates, one can show that
observer in S and S’ measure different cordinates for the ends of a stick
at rest in S, they agree on the length of the stick. Assume the stick has
end coodintaes x =a and x = a + l in S.
Doraemiyan (S’)
measure the end points
of the stick at the same
time, t’.
Using x’ = x – vt’:
x’(head) = x(head) – vt’
= a - vt’;
x’(end) = x(end) – vt’ =
(a+l) - vt’
x’(end) - x’(head) = x(end)
- x(head) = l
13
x(h) =a x(t)= l +a
Galilean transformation when
applied on light means speed of
light is not constant
Frame S’ travel with velocity v relative to S. If light travels with
the same speed in all directions relative too S, then (according
to the classical Galilean velocity-addition) it should have
different speeds as seen from S’.
14
Maxwell theory of light is
inconsistent with Newton’s law of
invariance
Consider a gadanken case: in an inertial frame moving at
the speed of light, the electromagnetic (EM) wave is
``frozen’’ and not waving anymore
Maxwell theory of EM wave will fail in the light-speed frame
of reference
Galilean transformation is inconsistent with Maxwell
theory of light
Newtonian law of invariance fails for EM in the lightspeed frame
Galilean transformation is going to fail when v is
approaching the speed of light – it has to be supplanted by
Lorentz transformation (to be learned later)
15
Ether and Michelson-Morley
Experiments
th
In early 19 century, it’s thought (incorrectly)
that
there exist an omi-pervasive medium called
Ether in which light propagates at a speed of
3x108m/s (analogue to sound propagate in the
mechanical medium of still air at speed 330m/s)
Thought to be the `absolute frame of reference’
that goes in accordance with Newtonian view of
absolute space and time
The effect of the ehter on speed of light can be
experimentally measured
16
Ether and Michelson-Morley
Experiments
If exists, from the viewpoint of the light source,
the Ether wind appears to `drift’ with a relative
speed of u wrp to Earth (One assumes that ether
frame is fixed wrp to the Sun, hence one expects
u ≈ 10-4c)
Consider a moving souce giving out two beams
of light in different direction (say, 90 degree to
each other)
Since the light source is moving through the omiperasive ehter medium, the different directions
of the two beams of light would mean that these
two beams will move with different velocities
17
when viewed in the frame of moving source
Experimental setup
Both arms has same length L
According to the ether wind
concept:
For arm 1, the speed of light
v
to is c-v as it approaches
M2,
c’ = c - v
c+v as it is reflected from M2
v
c
c’ = c + v
18
Experimental setup
For arm 2, the speed of light
to-and-fro M1 is
v
c’= √ (c2 - v2)
c
19
The two light beams start out in phase. When they
return and “recombined” by semi-transparent
mirror Mo interference pattern will be formed due
to their difference in phase, Df cDt /l, where Dt
= t1 - t2 Lv2/c3 is the time difference between the
light beams when return to Mo (figure a)
20
Now, when the whole set-up is rotated
through 90, arms 1 and 2 exchanges role
As a result, the interefence pattern will be
shifted as the time difference between the
beams after rotation now becomes 2Dt
The number of interefence fringes shifted
can be estimated via:
no. of fringe shift = 2cDt /l 2 Lv2/lc2
0.40
(taking v ≈ 10-4c, L = 11 m, l = 500nm)
Very precise experiment
21
Fig. (b) shows expected
fringe shift after a
rotation of the
interometer by 90
degree
22
NULL result
But MM sees only NULL result – no change in
the interference pattern
How to interprete the null result?
If Maxwell theory of light is right (as EM wave)
the notion of ether as an medium in which light
is propagating has to be discarded
Put simply: ether is not shown to exist
Einstein put it more strongly: the absolute frame
of reference (i.e. the ether frame) has to be
discarded
23
PYQ (past year question), KSCP 2003/04
What were the consequences of the negative result of
the Michelson-Morley experiment?
I. It render untenable the hypothesis of the ether
II. It suggests the speed of light in the free space is the
same everywhere, regardless of any motion of
source or observer
III. It implies the existence of a unique frame of reference
in which the speed of light in this frame is equal to c
A. III only B. I,II
C. I, III
D. I, II, III
E. Non of the above
Ans: B
24
Principle of special relativity
Einstein
believes that pure
thought is sufficient to
understand the world
The
most incomprehensive thing
in the universe is that the
universe is comprehensible
25
Classical EM theory is inconsistent
with Galileao transformation
Their is inconsistency between EM and
Newtonian view of absolute space and time
Einstein proposed SR to restore the
inconsistency between the two based on
two postulates:
26
Postulates of SR
1.
2.
The laws of physics are the same in all
inertial reference frames – a generalisation
of Newton’s relativity
The speed of light in vacuum is the same
for all observers independent of the motion
of the source – constancy of the speed of
light
27
Postulate 2 simply means that Galilean
transformation cannot be applied on light
speed. It also explains the Null result of
the MM experiment
Speed of light is always the same whether
one is moving or stationary wrp to the
source – its speed doesn’t increase or
reduced when the light source is moving
28
Einstein’s notion of space-time drastically
revolutionarizes that of Newton’s
The
notion of absolute frame of reference is
discarded
The Newton notion that time is absolute and
flows independently of the state of motion (or
the frame of reference chosen) is radically
modified – the rate of time flow does depends
on the frame of reference (or equivalently, the
state of motion).
This being so due to the logical consequence
of the constancy of the speed of light in all
inertial frame
29
PYQ (past year question), Final 2003/04
Which of the following statement(s) is (are) true?
I. The assumption of the Ether frame is
inconsistent with the experimental observation
II. The speed of light is constant
III. Maxwell theory of electromagnetic radiation
is inconsistent with the notion of the Ether frame
IV Special relativity is inconsistent with the
notion of the Ether frame
A. III,IV B. I, II, III C. I, II, III,IV
D. I, II
E. I, II,IV
ANS: E, my own question
30
Simultaneity is not an absolute
concept but frame dependent
Simultaneity in one frame is not guaranteed in another
frame of reference (due to postulate 2)
Two lightning bolts strike the ends of a moving boxcar.
(a) The events appear to be simultaneous to the
stationary observer at O but (b) for the observer at O’,
the front of the train is struck before the rear
31
Try to calculate it yourself
The breakdown of simultaneity means that the
two lights from A’ and B’ are not arriving at O’
at the same time. Can you calculate what is the
time lag, i.e. tA-tB, between the two lights
arriving at O’? t is the time measured in the O
frame.
32
Time dilation as a consequence
of Einstein’s postulate
In frames that are moving wrp to the
stationary frame, time runs slower
Gedanken experiment (thought
experiment)
33
Gedanken Experiment
Since light speed c is invariant (i.e. the
same in all frames), it is used to
measure time and space
A mirror is fixed to a moving vehicle,
and a light pulse leaves O’ at rest in
the vehicle.
(b) Relative to a stationery observe on
Earth, the mirror and O’ move with a
speed v.
34
Ligth triangle
Consider the
geometry of the
triangle of the light
We can calculate the
relationship between
Dt, Dt’ and v
l 2 = (cDt/2 )2
= d 2 + (u Dt/2 )2
35
Lorentz factor, g
Due to constancy of light postulate, both observer must
agree on c:
Speed of light = total distance travelled divide by time
taken
For observer in O’, c = 2 d /Dt’
For observer in O, c = 2 l / Dt, where
l 2 = d 2 + (u Dt/2 )2
Eliminating l and d,
Dt= gDt’, where
g 1 u2/c21/2
Lorentz factor, always > or equal 1, so that
Dt > = Dt’
36
Proper time
Try to discriminate between two kinds of time
interval:
Dt’ , proper time that measures the time interval of
the two events at the same point in space (e.g.
light emitted and received at the same point in the
vehicle)
Proper time is the time measured by a clock that is
stationary wrp to the events that it measures
Note that proper time is always ``shorter’’
compared to improper time
37
The elapsed time Dt between the same events in
any other frame is dilated by a factor of g compared
to the proper time interval Dt’
In other words, according to a stationary observer, a
moving clock runs slower than an identical
stationary clock
Chinese proverb:
1 day in the heaven = 10 years in the human
plane 天上方一日,人间已十年
38
Example
The watch of a student in the class is running at a rate
different than that of a student ponteng class to lumba
motosikal haram.
The time of the student on the bike’s is running at a
slower rate compared to that of the student in the class
Onc can imagine that when the watch on the arms of
the motocyclist ticks once in a second (as is concluded
by the local, or rest, observer, i,e, the motocyclist), the
student in the class (non-local observer) find the watch
of the motocyclist ticks at 1.000001 second per second.
39
To recap
Dt= gDt’ ; proper time interval, Dt’ Dt
The rate of time flowing in one frame is different from
the others (frames that are moving with a constant
speed relative to a give frame)
The relationship between the time intervals of the two
frames moving at an non-zero relatively velocity are
given by the time dilation formula
One must be aware of the subtle different between
which is the proper time and which is the improper one
40
Example
When you are measuring the time interval
between your heartbeats (on your bed in you
bedroom) using your watch, you are measuring
the proper time interval
Say a doctor who is in a car traveling at some
constant speed with recpect to you is monitoring
your heartbeat by some remote device. The time
interval between the heartbeat measured by him,
is improper time because he is moving wrp to
you
41
PYQ, Semester Test I, 2003/04
Suppose that you are travelling on board
a spacecraft that is moving with respect
to the Earth at a speed of 0.975c. You
are breathing at a rate of 8.0 breaths per
minute. As monitored on Earth, what is
your breathing rate?
A. 13.3
B. 2.88
C.22.2
D. 1.77
E. Non of the above
ANS: D, Cutnell, Q4, pg. 877
42
Solution
Suppose that you are travelling on board a spacecraft that is moving
with respect to the Earth at a speed of 0.975c. You are breathing at a
rate of 8.0 breaths per minute. As monitored on Earth, what is your
breathing rate?
g = 1/(1 – u2/c2)1/2 = 1/(1 – 0.9752)1/2 = 4.5
Use Dt = gDt’
Given local interval between breaths Dt’ = 1/8 = 0.125
min per breath (proper time interval)
Dt = gDt = 4.5 x 0.125 = 0.563 min per breath
1/ Dt’ = 1.77 breath per min (as seen by the
spaccraft observer)
To an oberver on the spacecraft, you seem to breath at
a slower rate
43
Example (read it yourself)
A spacecraft is moving past the Earth at a
constant speed 0.92c. The astronaut
measures the time interval between
successive ``ticks'' of the spacecraft clock
to be 1.0 s. What is the time interval that
an Earth observer measures between
``ticks'' of the astronaut's clock?
44
Solution
Dt’ = 1.0 s is the proper time interval
measured by the astronaut
Earth observer measures a greater time
interval, Dt, than does the astronaut, who
is at rest relative to the clock
The Lorentz factor g 1/1 u2/c2 -1/2 =
1/1 0.922-1/2 = 2.6
Hence, Dt = gDt’ = 2.6 x 1.0s = 2.6 s
45
Example: Muon decay lifetime
A muon is an unstable elementary particle which has a
lifetime t0 = 2.2 microsecond (proper time, measured in the
muon rest frame) and decays into lighter particles.
Fast muons (say, travelling at v = 99%c) are created in the
interactions of very high-energy particles as they enter the
Earth's upper atmosphere.
Assume v =
0.99c
In the muon rest
frame, the
distance
travelled by
muon before
decay is
D’ = (0.99c)t0
= 650 m
46
A muon travelling at 99% the speed of light.
has a Lorentz factor g = 7.09
Hence, to an observer in the rest frame (e.g
Earth) the lifetime of the muon is no longer t0
= 2.2 ms but
t g x t0 = 7.09 x 2 microseconds = 15.6 ms
Thus the muon would appear to travel for
15.6 microseconds before it decays
The distance it traversed as seen from Earth
is D = (0.99c) x 15.6 ms = 4,630 km (c.f. D’ =
650 m )
47
Muon are detected at a much lower
altitude
Observation has verified
the relativistic effect of
time dilation – muons
are detected at a
distance of 4700 m
below the atmospheric
level in which they are
produced
Hence the dilated muon
lifetime is confirmed
experimentally
48
49
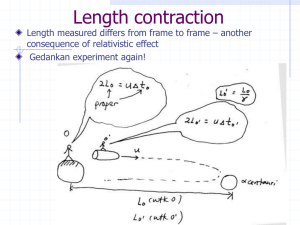
Length contraction
Length measured differs from frame to frame –
another consequence of relativistic effect
Gedanken experiment again!
50
Two observers: O on Earth, O’ traveling to and
fro from Earth and alpha centauri with speed u
Total distance between Earth - alpha centauri –
Earth, according to O (Earth observer), = L0
O sees O’ return to Earth after Dt0
Observer O’ in a spaceship is heading aC with
speed u and returns to Earth after Dt’ according
to his clock
51
Use some simple logics…
In O: 2L0 = uDt0
In O’: 2L0’ = uDt0’
Due to time dilation effect, Dt0’ is shorter
than Dt0 , i.e. Dt0 > Dt0’
Dt0 is related to Dt0’ via a time dilation
effect, Dt0’ = Dt0 /g , hence
L0’ / L0 = Dt0’ /Dt0 = 1 / g , or
52
L0’ = L0 / g
L0 is defined as the proper length = length of
object measured in the frame in which the object
(in this case, the distance btw Earth and aC) is at
rest
L0’ is the length measured in the O’ frame, which is
The length of a moving objecte is measured to be
shorter than the proper length – length contraction
moving wrp to the “object” – here refer to the
distance between E- aC
53
If an observer at rest wrp to an object
measures its length to be L0 , an observer
moving with a relative speed u wrp to the
object will find the object to be shorter
than its rest length by a foctor 1 / g .
54
Example of moving ruler
A stick moves to the right
with a speed v (as seen in
a rest frame, O)
(a) The stick as viewed by
a frame attached to it (O’
frame, Lp = proper length)
(b) The stick as seen by
an observer in a frame O.
The length measured in
the O frame (L) is shorter
than the proper length by
a factor 1/ g
55
Length contraction only happens
along the direction of motion
Example: A spaceship in the form of a triangle flies by an
oberver at rest wrp to the ship (see fig (a)), the distance
x and y are found to be 50.0 m and 25.0 m respectively.
What is the shape of the ship as seen by an observer
who sees the ship in motion along the direction shown in
fig (b)?
56
Solution
The observer sees the horizontal length of the
ship to be contracted to a length of
L = Lp/g = 50 m√(1 – 0.9502) = 15.6 m
The 25 m vertical height is unchanged because it
is perpendicular to the direction of relative motion
between the observer and the spaceship.
57
Example
An observer on Earth sees a spaceship at an
altitude of 435 moving downward toward the
Earth with a speed of 0.97c. What is the
altitude of the spaceship as measured by an
observer in the spaceship?
58
Draw the diagram yourself
As a useful strategy to solve physics
problem you should always try to translate
the problems from text into diagramatical
form with all the correct labelling
59
Solution
One can consider the altitude see by the
stationary (Earth) observer as the proper
length (say, L'). The observer in the
spaceship should sees a contracted length,
L, as compared to the proper length.
Hence the moving observer in the ship
finds the altitude to be
L = L' / g = 435 m x [1- (0.97)2]-1/2 = 106
m
60
PYQ,
KSCP
03/04
How fast does a rocket have to go for
its length to be contracted to 99% of
its rest length?
Ans: Rest length = proper length = LP
= length of the rocket as seen by
observer on the rocket itself
L improper length = length of the
rocket as seen from Earth oberver
Always remember that proper length
is longer than improper length
L
v
0.99 1
Lp
c
v 0.141c
2
61
Lorentz Transformation
All inertial frames are equivalent
Hence all physical processes analysed in
one frame can also be analysed in other
inertial frame and yield consistent results
A transformation law is required to related
the space and time coordinates from one
frame to another
62
An event observed in two frames of
reference must yield consistant
results related by transformatin
laws
63
Different frame uses different
notation for coordinates (because
their clocks and ruler are different
O' frame uses {x',y',z‘;t‘} to denote the
coordinates of an event, whereas O frame uses
{x,y,z;t}
How to related {x',y',z',t‘} to {x,y,z;t}?
In Newtonian mechanics, we use Galilean
transformation
However, as discussed, GT fails when u c
because the GT is not consistent with the
constancy of the light speed postulate
The relativistic version of the transformation law
is given by Lorentz transformation
64
Two observers in two inertial
frames with relative motion
I see O’ moving with a velocity +u
I measures the
coordinates of M as
{x,t}
+u
I measures the coordinates of
M as {x’,t’}
Object M
-u
O
O’
I see O moving with a
velocity -u
65
Derivation of Lorentz
transformation
Our purpose is to find the transformation that relates
{x,t} with {x’,t’}
66
Consider a rocket moving with a speed u (O'
frame) along the xx' direction wrp to the
stationary O frame
A light pulse is emitted at the instant t' = t =0
when the two origins of the two reference
frames coincide
The light signal travels as a spherical wave at a
constant speed c in both frames
After some times t, the origin of the wave
centered at O has a radius r = ct, where
r 2 = x2 + y2 + z2
67
Methematical details
From the view point of O', after some times t‘ the origin of the wave,
centered at O' has a radius:
r' = ct' , (r’ )2 = (x’)2 + (y’ )2 + (z’ )2
y'=y, z' = z (because the motion of O' is along the xx’) axis – no
change for y,z coordinates (condition A)
The transformation from x to x’ (and vice versa) must be linear, i.e. x’
x (condition B)
Boundary condition (1): In the limit of v c, from the viewpoint of O,
the origin of O’ is located on the wavefront (to the right of O) x ’ =
0 must correspond to x = ct
Boundary condition (2): In the same limit, from the viewpoint of O’,
the origin of O is located on the wavefront (to the left of O’) x = 0
corresponds to x’ = -ct’
Putting everything together we assume the form x’ = k(x - ct) to
relate x’ to {x,t} as this is the form that fulfill all the conditions (A,B)
and boundary consdition (1) ; (k some proportional constant to be
determined)
Likewise, we assume the form x = k(x’ + ct ’) to relate x to {x ’,t ‘} as
this is the form that fulfill all the conditions (A,B) and boundary
consdition (2) ;
68
Finally, the transformation obtained
Hence, with r = ct , r’ = ct ’, x = k(x’ +
ct’ ), x ’ = k(x - ct) we solve for {x',t'} in
terms of {x,t } to obtain the desired
transformation law (do it as an exercise)
x ut
t u / c x
x'
g ( x ut )
t'
g t (u / c ) x
2
u
1
c
2
u
1
c
2
2
69
Space and time now becomes
state-of-motion dependent (via g)
the constant k is identified as the Lorentz
factor, g
Note that, now, the length and time interval
measured become dependent of the state of
motion (in terms of g) – in contrast to Newton’s
viewpoint
Lorentz transformation reduces to
Galilean transformation when u << c
(show this yourself)
i.e. LT GT in the limit v<<c
70
How to express {x, t} in terms of {x’, t’}
We have related {x',t'} in terms of {x,t }
x ut
t u / c x
as per
x'
g ( x ut ) t '
g t (u / c ) x
2
u
1
c
2
u
1
c
2
2
Now, how do we express {x, t } in terms
of {x’, t’}
71
O’ moving to the right with
velocity +u is equivalent to O
moving to the left with velocity
-u
x x ', u u
x ' g ( x ut ) x g ( x ' ut ')
t ' g t (u / c ) x t g t ' (u / c ) x '
2
2
The two transformations above are equivalent; use
which is appropriate in a given question
72
Length contraction can be
recovered from the LT
Consider the rest length of a ruler as measured
in frame O’ is L’ = Dx’ = x’2 - x’1 (proper length)
measured at the same instant in that frame,
hence t’2 = t’1
What is the length of the rule as measured by O?
The length in O, according the LT is
L’ Dx’ = x’2 - x’1 = g (x2 - x1) – u(t2 -t1)]
The length of the ruler in O is simply the
distance btw x2 and x1 measured at the same
instant in that frame, hence t2 = t1, hence L’ = g
L
73
Similarly, how would you recover
time dilation from the LT?
Do it as homework
74
Lorentz velocity transformation
M is moving with a
velocity +ux from my
point of view
I see M moving with a velocity +ux’
O
I see O’ moving with a
velocity +u
O
Object M
Object M
+u
O’
How to relate the velocity of the object M as seen in
the O’ (u’x) frame to that seen in the O frame (ux)?
75
Derivation
By definition, ux = dx/dt, u’x = dx’/dt’
The velocity in the O’ frame can be
obtained by taking the differentials of the
Lorentz transformation,
u
dx ' g (dx udt ), dt ' g (dt
c
2
dx)
76
Combining
dx ' g (dx udt )
u
dt ' g (dt u dx)
2
c
'
x
ux u
uux
1 2
c
dt
dx
u
dt dt
dt
dt dt u dx
2
dt c dt
where we have made used of the definition
ux = dx/dt
77
Comparing the LT of velocity with
that of GT
Lorentz transformation of velocity:
dx ' ux u
u 'x
dt ' 1 uxu
Galilean transformation of velocity:
c2
dx ' d ( x ut ) dx
u 'x
u ux u
dt '
dt
dt
GT reduces to LT in the limit u << c
78
Please try to understand the
definition of ux , u’x , u so that you
wont get confused
79
LT is consistent with the
constancy of speed of light
in either O or O’ frame, the speed of light
seen must be the same, c
Say object M is moving with speed of light
as seen by O, i.e. ux = c
According to LT, the speed of M as seen by
O’ is
ux u
c u c u
c u
u 'x
c
uxu
cu
u 1
1 2 1 2 1
c u
c
c c
c
80
That is, in either frame, both observers
agree that the speed of light they measure
is the same, c = 3 x 108m/s
In contrast, according to GT, the speed of
light seen by O’ would be
u ' x ux u c u
Which is inconsistent with constancy of speed of
light postulate
81
To recap
the LT given in the previous analysis
relates u’x to ux in which O’ is moving
with +u wrp to O,
ux u
u 'x
ux u
1 2
c
82
From the view point of O’
To express ux in terms of u’x simply
perform the similar derivation from the
view point of O’ such that O is moving in
the –u direction: .
ux u 'x , u 'x ux , u u
ux u
u 'x u
u 'x
ux
ux u
u 'x u
1 2
1 2
c
c
83
Recap: Lorentz transformation
relates
{x’,t’} {x,t}; u’x ux
x ' g ( x ut )
t ' g t (u / c ) x
2
ux u
u 'x
ux u
1 2
c
x g ( x ' ut ')
t g t ' (u / c 2 ) x '
u 'x u
ux
u 'x u
1 2
c
84
Example
A boy is slapped twice on the face by his old girlfriend. This is
happening in a hotel room (a rest frame we call O).
u
t21
O
O’
The two slapping occurs at t1 , t2 such that Dt = t2- t1 = 1 s,
and Dx =0.
To his new girlfriend in a car moving with speed u on
the road (we call this moving frame O’), what is the
time interval between the two slapping?
85
The time t’ as seen by O’ in terms of t is simply related by
t ' g t (u / c ) x
2
Hence the time interval as measured by his new girlfriend
in O’, Dt’ in terms of Dt is simply
Dt ' t2' t1'
g (t2 t1 ) (u / c 2 )( x2 x1 )
g Dt (u / c 2 )Dx
gDt
1
0.99c
1
c
2
1s 7.09s
This is nothing but just the time dilation effect calculated
using LT approach
86
Example (relativistic velocity
addition)
Rocket 1 is approaching rocket 2 on a
head-on collision course. Each is moving
at velocity 4c/5 relative to an independent
observer midway between the two. With
what velocity does rocket 2 approaches
rocket 1?
87
Diagramatical translation of the
question in text
C.f. In GT, their relative speed would just be 4c/5 + 4c/5 =
1.6 c – which violates constancy of speed of light postulate.
88
See how LT handle this situation:
Choose the observer in the middle as in the stationary
frame, O
Choose rocket 1 as the moving frame O‘
Call the velocity of rocket 2 as seen from rocket 1 u’x.
This is the quantity we are interested in
Frame O' is moving in the +ve direction as seen in O,
so u = +4c/5
The velocity of rocket 2 as seen from O is in the
-ve direction, so ux = - 4c/5
Now, what is the velocity of rocket 2 as seen from
frame O', u ’x = ? (intuitively, u ’x must be in the
negative direction)
89
Use the LT
4c 4c
ux u
40
5 5
u 'x
c
uxu
4c 4c
41
1 2
c
5 5
1
2
c
i.e. the velocity of rocket 2 as seen from rocket 1 (the
moving frame, O’) is –40c/41, which means that O’ sees
rocket 2 moving in the –ve direction (to the left in the
picture), as expected.
90
PYQ, KSCP 2003/04
A man in a spaceship moving at a velocity of 0.9c with respect to
the Earth shines a light beam in the same direction in which the
spaceship is travelling. Compute the velocity of the light beam
relative to Earth using (i) Galilean approach (ii) special relativity
approach [6 marks]. Please define clearly all the symbols used
in
your working.
Ans
O’ is the moving frame travelling at v = 0.9c with respect to the
Earth. Speed of the light beam as seen in the frame O’ is u’ = c.
O is the Earth frame. We wish to find the speed of the light
beam as seen from frame O, u.
(i) According to Galilean transformation, u = u’ + v = c + 0.9c =
1.9c.(ii) Use
u
u ' v
c 0.9c
c vc
v
0.9
c
1 2 u ' 1 2 c
c
c
91
Relativistic Dynamics
By Einstein’s postulate, the onservational law of
linear momentum must also hold true in all
frames of reference
m1u1
m2u2
m1v1
m2v2
Conservation of linear momentum classically means
m1u1 +m2u2 = m1v1 +m2v2
92
Modification of expression of linear
momentum
Classically, p = mu. In the other frame, p ’ = m ’u ’;
the mass m ’ (as seen in frame O’) is the same
as m (as seen in O frame) – this is according to
Newton’s mechanics
However, simple consideration will reveal that in
order to preserver the consistency between
conservation of momentum and the LT, the
definition of momentum has to be modified such
that m’ is not equal to m.
That is, the mass of an moving object, m, is
different from its value when it’s at rest, m0
93
In other words…
In order to preserve the consistency between
Lorentz transformation of velocity and
conservation of linear momentum, the definition
of 1-D linear momentum, classically defined as
pclassical = mu, has to be modified to
psr = mu = gm0u (where the relativisitic mass m
= gm0 is not the same the rest mass m0
Read up the text for a more rigorous illustration
why the definition of classical momentum is
inconsistent with LT
94
Grafically…
I see the momentum
of M as p =
mv=m0gv
O
O’
I see M is at rest. Its mass
is m0, momentum, p’ = 0
v
M
95
Two kinds of mass
Differentiate two kinds of mass: rest mass
and relativistic mass
m0 = rest mass = the mass measured in a
frame where the object is at rest. The rest
mass of an object must be the same in all
frames (not only in its rest frame).
Relativisitic mass m = g m0 of an object
changes depends on its speed
96
Behaviour of pSR as compared to
pclassic
Classical momentum is
constant in mass, pclassic =
m0v
Relativisitic momentum is
pSR = m0gv
pSR / pclassic = g as v
c
In the other limit, pSR /
pclassic = 1 as v << c
97
Example
The rest mass of an electron is m0 = 9.11 x
m0
-31
10 kg.
If it moves with u = 0.75 c, what is its
relativistic momentum?
p = m0 g u
Compare it with that calculated with
classical definition.
98
Solution
The Lorentz factor is g = [1-(u/c)2] -1/2
= [1-(0.75c/c)2] -1/2=1.51
Hence the relativistic momentum is simply
p = g x m0 x 0.75c
= 1.51 x 9.11 x 10-31kg x 0.75 x 3 x 108 m/s
= 3.1 x 10-22 kg m/s = Ns
In comparison, classical momentum gives
pclassical = m0 x 0.75c = 2.5 x 10-22 Ns – about
34% lesser than the relativistic value
99
Work-Kinetic energy theorem
Recall the law of conservation of
mechanical energy:
Work done by external force on a system,
W = the change in kinetic energy of the
system, DK
100
DK = K2 - K1
K1
K2
F
F
s
Conservation of mechanical energy: W = DK
W=Fs
The total energy of the object, E = K + U. Ignoring potential energy,
E of the object is solely in the form of kinetic energy. If K1 = 0, then
E = K2. But in general, U also needs to be taken into account for E.
101
In classical mechanics, mechanical energy (kinetic +
potential) of an object is closely related to its momentum and
mass
Since in SR we have redefined the classical mass and
momentum to that of relativistic version
mclass(cosnt) mSR = m0g
pclass = mclass u pSR = (m0g)u
we must also modify the relation btw work and energy so
that the law conservation of energy is consistent with SR
E.g, in classical mechanics, K = p2/2m = 2mu2/2. However,
this relationship has to be supplanted by the relativistic
version K = mu2/2 K = E – m0c2 = mc2 - m0c2
We will like to derive K in SR in the following slides
102
Force, work and kinetic energy
When a force is acting on an object with rest
mass m0, it will get accelerated (say from rest)
to some speed (say u) and increase in kinetic
energy from 0 to K
K as a function of u can be derived from first
principle based on the definition of:
Force,F = dp/dt,
work done, W = F dx,
and conservation of mechanical energy, DK = 103
W
Derivation of relativistic kinetic
energy
Force = rate change of
momentum
x2
x2
x2
dp
dp dx
W F dx
dx
dx
dt
dx dt
x1 0
x1 0
x1 0
x2
Chain rule in
calculus
dp
dp
dp du
udx
udx udu
dx
du dx
du
x1 0
0
0
dx
where, by definition, u
is the velocity of the
dt object
u
u
104
Explicitly, p = gm0u,
Hence, dp/du = d/du(gm0u)
= m0 [u (dg/du) + g ]
= m0 g + (u2/c2) g3] = m0 (1-u2/c2)-3/2
in which we have inserted the relation
dg
d
du du
1
u
1
u 3
2
2g
3/
2
c
u2 c u2
1 2
1 2
c
c
u2
W m0 u 1 2
0
c
u
integrate
3/ 2
du
K W m0g c m0c mc m0c
2
2
2
2
105
K m0g c m0c mc m0c
2
2
2
2
The relativisitic kinetic energy of an object of
rest mass m0 travelling at speed u
E0 = m0c2 is called the rest energy of the object. Its
value is a constant for a given object
Any object has non-zero rest mass contains energy as
per E0 = m0c2
One can imagine that masses are ‘energies frozen in
the form of masses’ as per E0 = m0c2
E = mc2 is the total relativistic energy of an moving
object
106
Or in other words, the total relativistic energy
of a moving object is the sum of its rest
energy and its relativistic kinetic energy
E mc m0c K
2
2
The mass of an moving object m is
larger than its rest mass m0 due to the
contribution from its relativistic kinetic
energy – this is a pure relativistic effect
not possible in classical mechanics
E = mc2 relates the mass of an object to
the total energy released when the
object is converted into pure energy
107
Example, 10 kg of mass, if converted into pure
energy, it will be equivalent to
E = mc2 = 10 x (3 x108) 2 J = 9 x1017J
– equivalent to a few tons of TNT explosive
108
PYQ, KSCP 2003/04
(i) What is the rest mass of a proton in
terms of MeV?
Ans:
(i) 1.67 x 10-27kg x (3x108 m/s)2 =
1.503x10-10J = (1.503 x10-10/1.6x10-19) eV
= 939.4 MeV
109
PYQ, KSCP 2003/04
What is the relativistic mass of a proton
whose kinetic energy is 1 GeV?
Ans: rest mass of proton, mp = 939.4 MeV
K g 1 mpc
g 1 K/mpc
2
2
1GeV/ 939.4MeV 1.06
g 1.06 1 2.06
mc2 g mpc2 2.06 939.4MeV = 1939.4 MeV
110
Reduction of relativistic kinetic
energy to the classical limit
The expression of the relativistic kinetic
energy
2
2
K m0g c m0c
must reduce to that of classical one in the limit u
0 when compared with c, i.e.
lim Krelativistic
u c
p
2
2
classical
2m0
m0u
(
)
2
111
Expand g with binomial expansion
For u << c, we can always expand g in
terms of (u/c)2 as
u
g 1 2
c
2
1/ 2
u2
u4
1 2 terms of order 4 and higher
2c
c
K mc m0c g c (g 1)
2
2
m0u
1u
2
m0 c 1
... 1
2
2
2 c
2
2
2
i.e., the relativistic kinetic energy reduces
to classical expression in the u << c limit
112
Example
An electron moves with speed u = 0.85c. Find its
total energy and kinetic energy in eV.
CERN’s picture: the circular accelerator accelerates
electron almost the speed of light
113
Solution
Due to mass-energy equivalence, sometimes we
express the mass of an object in unit of energy
Electron has rest mass m0 = 9.1 x 10-31kg
The rest mass of the electron can be expressed
as energy equivalent, via
m0c2 = 9.1 x 10-31kg x (3 x 108m/s)2
= 8.19 x 10-14 J
= 8.19 x 10-14 x (1.6x10-19)-1 eV
= 511.88 x 103 eV = 0.511 MeV
114
Solution
First, find the Lorentz factor, g = 1.89
The rest mass of electron, m0c2, is
0.5 MeV
Hence the total energy is
E = mc2 = g m0c2)= 1.89 x 0.5 MeV =
0.97 MeV
Kinetic energy is the difference between
the total relativistic energy and the rest
mass, K = E - m0c2= (0.97 – 0.51)MeV =
0.46 MeV
115
Conservation of Kinetic energy in
relativistic collision
Calculate (i) the kinetic energy of the
system and (ii) mass increase for a
completely inelastic head-on of two balls
(with rest mass m0 each) moving toward
the other at speed u/c = 1.5x10-6 (the
speed of a jet plane). M is the resultant
mass after collision, assumed at rest.
M
m0
u
u
m0
116
Solution
(i) K = 2mc2 - 2m0c2 = 2(g1m0c2
(ii) Ebefore = Eafter 2g m0c2 = Mc2 M = 2g m0
Mass increase DM = M - 2m0 = 2(g 1m0
Approximation: u/c = …=1.5x10-6 g 1 + ½ u2/c2
(binomail expansion) M 21 + ½ u2/c2m0
Mass increase DM = M - 2m0
(u2/c2m0 = 1.5x10-6m0
Comparing K with DMc2: the kinetic energy is not
lost in relativistic inelastic collision but is converted
into the mass of the final composite object, i.e.
kinetic energy is conserved
In contrast, in classical mechanics, momentum is
conserved but kinetic energy is not in an inelastic
collision
117
Relativistic momentum and
relativisitc Energy
In terms of relativistic momentum,
the relativistic total energy can be
expressed as followed
2
2
u
c p
E g m c ; p g m u 2 2
c
E
2
2
2 4
0
2
2
2
0
2
2
2 4 2
mc
m0 c E
2
2 2 4
2 2
E g m0 c
m0 c 2 2 2
u
E c p
1 2
c
2 4
0
2
E p c m c
2
2 2
2 4
0
Conservation of
energy-momentum 118
In SR, both relativistic mass-energy
and momentum are always
conserved in a collision (in contrast
to classical mechanics in which KE
is not conserved in inelastic collision)
119
Example: measuring pion mass
using conservation of momentumenergy
pi meson decays into a muon + massless neutrino
If the mass of the muon is known to be 106 MeV/c2, and
the kinetik energy of the muon is measured to be 4.6
MeV, find the mass of the pion
120
Solution
Relationship between Kinetic energy and momentum:
Em2 pm2 c 2 mm2 c 4
Conservation of relativistic energy: E Em E
m c 2 mm2 c 4 c 2 pm 2 m2c 4 c 2 p 2
m c mm2 c 2 pm 2 pm
Momentum conservation: pm p
Also, total energy = K.E. + rest energy
Em K m mm c 2
pm c K m mm c
2 2
pm c
K m mm c
2 2
2 2
mm2 c 4 ;
mm2 c 4
121
Plug pm c K m mm c
2 2
2 2
mm2 c 4 into
m c 2 mm2 c 4 c 2 pm 2 cpm
2 2
mm c K m mm c mm2 c 4
2 4
K m mm c 2
K m mm c
2 2
mm2 c 4
2
2
K
2
K
m
c
m m m
106MeV 2
4.6MeV+
c
2
c
106MeV 2
4.6MeV 2 4.6MeV
c
2
c
2
111MeV 996MeV=143MeV
122
Binding
energy
The nucleus of a deuterium comprises of
one neutron and one proton. Both
nucleons are bounded within the
deuterium nucleus
Neutron, mn
proton, mp
Nuclear fusion
Initially, the total
Energy = (mn+ mn)c2
U
After fusion, the total
energy = mdc2 + U
Deuterium, md
Analogous to exothermic process in
123
chemistry
U is the energy that will be released when
a proton and a neutron is fused in a
nuclear reaction. The same amount of
energy is required if we want to separate
the proton from the neutron in a
deuterium nucleus
U is called the binding energy
124
U can be explained in terms energy-mass
equivalence relation, as followed
For the following argument, we will ignore KE
for simplicity sake
Experimentally, we finds that mn + mp > md
By conservation of energy-momentum,
E(before) = E(after)
mnc2 + mpc2 + 0 = mdc2 + U
Hence, U = (mp + mn)c2 - mdc2 = Dmc2
The difference in mass between deuterium and
the sum of (mn + mn)c2 is converted into the
binding energy that binds the proton to the
neutron together
125
Example
mn= 1.008665u; mp= 1.007276u;
md= 2.013553u;
u = standard atomic unit = mass of 1/12 of the mass
of a 12C nucleus
= 1.66 x 10-27kg
= 1.66 x 10-27 x c2 J = 1.494 x 10-10 J
= 1.494 x 10-10/(1.6x10-19) eV
= 933.75 x 106 eV = 933.75 x MeV
•Hence the binding energy
U Dmc2 = (mp + mn)c2 - mdc2
=0.002388u = 2.23 MeV
126
Fission
236
92
U Rb
90
37
143
55
1
0
Cs+3 n
Such as
The reverse of nuclear fusion is nuclear fission
An parent nuclide M disintegrates into daughter
nuclides such that their total mass mi < M.
The energy of the mass deficit equivalent,
Q = (M - mi)c2 = Dmc2 called disintegration
energy will be released
127
SR finishes here…
128