Document
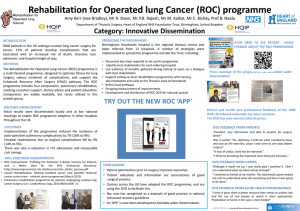
advertisement

10.0 Z-Transform
10.1 General Principles of
Z-Transform
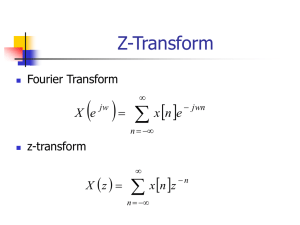
Z-Transform
Eigenfunction Property
x[n] = zn
y[n] = H(z)zn
h[n]
linear, time-invariant
H z
n
h
n
z
n
Chapters 3, 4, 5, 9, 10 (p.2 of 9.0)
jω
Laplace Transform (p.4 of 9.0)
A Generalization of Fourier Transform
from s j to s j
X j
xt e j t dt
xt e e
- t
jt
dt
t
Fourier transform of x t e
X( + jω)
jω
Laplace Transform (p.5 of 9.0)
Z-Transform
Eigenfunction Property
– applies for all complex variables z
z e j
hn e
H e j
j n
Fourier Transform
n
z re j
n
h
n
z
H z
n
Z-Transform
X z
n
x
n
z
n
Z
xn
X z
Z-Transform
Z-Transform
Z-Transform
A Generalization of Fourier Transform
from z e j to z re j
X re xnre xn r e
Fourier Transform of xn r
j
j n
n
n
n
n
Im
z = rejω
unit circle
z = ejω
r
ω
1
Re
jn
Z-Transform
Z-Transform
Z-Transform
Z-Transform
2π
0
Z-Transform
Z-Transform
Z-Transform
A Generalization of Fourier Transform
X z
z e
j
X e j
reduces to Fourier Transform
– X(z) may not be well defined (or converged) for all z
– X(z) may converge at some region of z-plane, while
x[n] doesn’t have Fourier Transform
– covering broader class of signals, performing more
analysis for signals/systems
Z-Transform
Rational Expressions and Poles/Zeros
X z
N z
D z
roots
zeros
roots
poles
In terms of z, not z-1
– Pole-Zero Plots
specifying X(z) except for a scale factor
Z-Transform
Z-Transform
Rational Expressions and Poles/Zeros
– Geometric evaluation of Fourier/Z-Transform from
pole-zero plots
X z M
i z i
j z j
each term (z-βi) or (z-αj) represented by a vector with
magnitude/phase
Poles & Zeros
Poles & Zeros (p.9 of 9.0)
Z-Transform (p.12 of 10.0)
Z-Transform
Rational Expressions and Poles/Zeros
– Geometric evaluation of Fourier/Z-transform from
pole-zero plots
Example : 1st-order
hn a nu n
H z
1
z
, z a
1 az1 z a
pole: z a, zero : z 0
See Example 10.1, p.743~744 of text
H e j
1
1 ae j
See Fig. 10.13, p.764 of text
Z-Transform
Rational Expressions and Poles/Zeros
– Geometric evaluation of Fourier/Z-transform from
pole-zero plots
Example : 2nd-order
sin n 1
n
hn r
un
sin
H z
1
1 2r cos z 1 r 2 z 2
pole: z1 re j , z 2 re j
double zero : z 0
See Fig. 10.14, p.766 of text
Z-Transform
Rational Expressions and Poles/Zeros
– Specification of Z-Transform includes the region of
convergence (ROC)
Example :
x1 n a n u n
X 1 z
1
1 az
1
z
za
, z a
x2 n a n u n 1
X 2 z
1
1 az
1
z
za
, z a
pole: z a, zero : z 0 in bot h cases
See Example 10.1, 10.2, p.743~745 of text
Z-Transform
Rational Expressions and Poles/Zeros
– x[n] = 0, n < 0
X(z) involes only negative powers of z initially
x[n] = 0, n > 0
X(z) involes only positive powers of z initially
– poles at infinity if
degree of N(z) > degree of D(z)
zeros at infinity if
degree of D(z) > degree of N(z)
Z-Transform (p.6 of 10.0)
Region of Convergence (ROC)
Property 1 : The ROC of X(z) consists of a ring in
the z-plane centered at the origin
– for the Fourier Transform of x[n]r-n
to converge
n
xn r n , depending on r
only, not on ω
– the inner boundary may extend to
include the origin, and the outer
boundary may extend to infinity
Property 2 : The ROC of X(z) doesn’t include any
poles
Property 1
Region of Convergence (ROC)
Property 3 : If x[n] is of finite duration, the ROC is
the entire z-plane, except possibly for z
= 0 and/or z = ∞
xn 0, n N1 , n N 2
X z
xn z
N2
n
n N1
– If N1 0, N 2 0
z 0 ROC, z ROC
If N1 0, z ROC
If N 2 0, z 0 ROC
Property 3, 4, 5
Region of Convergence (ROC)
Property 4 : If x[n] is right-sided, and {z | |z| =
r0 }ROC, then {z | ∞ > |z| > r0}ROC
xn
n N1
r0
n
If N1 0, z ROC
If N1 0, z ROC
Region of Convergence (ROC)
Property 5 : If x[n] is left-sided and {z | |z| =
r0}ROC, then {z | 0 < |z| < r0}ROC
xn r
N2
n
0
n
If N 2 0, z 0 ROC
If N 2 0, z 0 ROC
Region of Convergence (ROC)
Property 6 : If x[n] is two-sided, and {z | |z| =
r0}ROC, then ROC consists of a ring
that includes {z | |z| = r0}
xn xR n xL n
– a two-sided x[n] may not have ROC
Region of Convergence (ROC)
Property 7 : If X(z) is rational, then ROC is
bounded by poles or extends to zero or
infinity
Property 8 : If X(z) is rational, and x[n] is rightsided, then ROC is the region outside
the outermost pole, possibly includes z =
∞. If in addition x[n] = 0, n < 0, ROC
also includes z = ∞
Region of Convergence (ROC)
Property 9 : If X(z) is rational, and x[n] is left-sided,
the ROC is the region inside the
innermost pole, possibly includes z = 0.
If in addition x[n] = 0, n > 0, ROC also
includes z = 0
See Example 10.8, p.756~757 of text
Fig. 10.12, p.757 of text
Inverse Z-Transform
xn r
n
1
F 1 X r1e j
xn 1
2
xn 1
2j
X z z
2
X r1e
j
21
2
r e
j
1
n 1
dz
n
d ,
X r1e j e jn d
z r1e
j
j
dz jr1e d
jzd
– integration along a circle counterclockwise,
{z | |z| = r1}ROC, for a fixed r1
Laplace Transform (p.28 of 9.0)
Z-Transform
Z-Transform (p.13 of 10.0)
Inverse Z-Transform
Partial-fraction expansion practically useful:
X z
m
Ai
i 1
1 ai z 1
for each t erm
Ai
1 ai z 1
– ROC outside the pole at z ai Ai ai un
n
ROC inside the pole at z ai Ai ai u n 1
n
Inverse Z-Transform
Partial-fraction expansion practically useful:
– Example:
3
5
z 1
1
2
6
X z
1 1
1 1
1 1
1 1
1 z 1 z 1 z 1 z
4
3
4
3
un
n
1
1
ROC z z
, xn
u n 2 1
3
4
3
n
u n 1
n
1
1
1
ROC z
z
, xn
u n 2 1
3
4
4
3
n
u n 1
n
1
1
ROC z z
, xn
u n 1 2 1
4
4
3
n
See Example 10.9, 10.10, 10.11, p.758~760 of text
Example
Inverse Z-Transform
Power-series expansion practically useful:
X z
n
x
n
z
n
– right-sided or left-sided based on ROC
Inverse Z-Transform
Power-series expansion practically useful:
– Example:
X z
1
1 az1
ROC z z a ,
xn a n u n
ROC z z a ,
1
1 az1
1
1 az1
xn a n u n 1
1 az1 a 2 z 2 ......
a 1 z a 2 z 2 ......
See Example 10.12, 10.13, 10.14, p.761~763 of text
Known pairs/properties practically helpful
10.2 Properties of Z-Transform
xn
X z , ROC R
Z
x1 n X 1 z , ROC R1
Z
x2 n
X 2 z , ROC R2
Z
Linearity
ax1n bx2 n
aX1 z bX2 z , ROC R1 R2
Z
– ROC = R1∩ R2 if no pole-zero cancellation
Linearity & Time Shift
Linearity
Time Shift
Time Shift
xn n0
z
Z
n0
X z ,
ROC = R, except for possible addition or deletion of the
origin or infinity
– n0 > 0, poles introduced at z = 0 may cancel zeros at
z=0
– n0 < 0, zeros introduced at z = 0 may cancel poles at
z=0
– Similarly for z = ∞
Scaling in z-domain
z
Z
n
z0 xn
X , ROC z0 z z R
z
0
– Pole/zero at z = a shifted to z = z0a
– z0 e j0
Z
e j0n xn
X e j0 z
rotation in z-plane by ω0
See Fig. 10.15, p.769 of text
– z0 r0e j0
pole/zero rotation by ω0 and scaled by r0
Scaling in Z-domain
Shift in s-plane (p.33 of 9.0)
Time Reversal
1
1
x n
X , ROC
z R
z
z
Z
Time Expansion
xn k , n is a multipleof k
xk n
, else
0
xk n
X z k , ROC z1 k z R
Z
– pole/zero at z = a shifted to z = a1/k
Time Reversal
Time Expansion
(p.41 of 5.0)
Time Expansion (p.42 of 5.0)
Conjugation
x n
X z , ROC R
Z
– if x[n] is real
X z X z
a pole/zero at z = z0 a pole/zero at z z0
*
Convolution
x n x n
X z X z , ROC R R
Z
1
2
1
2
1
2
ROC may be larger if pole/zero cancellation occurs
– power series expansion interpretation
Conjugation
Multiplication (p.33 of 3.0)
xt a k , y t bk
FS
FS
FS
xt yt
dk
a b
j
Conjugation
x t a
FS
k
a k ak , if xt real
j k j
ak bk
Multiplication (p.34 of 3.0)
Convolution
y3
k
First Difference/Accumulation
xn xn 1
1 z
Z
1
X z
ROC = R with possible deletion of z = 0
and/or addition of z = 1
xk 1 z
n
k
Z
1
1
X z
ROC R z
z 1
First Difference/Accumulation
Differentiation in z-domain
nxn
z
Z
dX z
, ROC R
dz
Initial-value Theorem
if xn 0, n 0
x0 lim X z
z
X z xn z n
k 0
Summary of Properties/Known Pairs
See Tables 10.1, 10.2, p.775, 776 of text
10.3 System Characterization with
Z-Transform
y[n]=x[n]*h[n]
x[n]
h[n]
X(z)
H(z)
Y(z)=X(z)H(z)
system function, transfer function
Causality
– A system is causal if and only if the ROC of H(z) is
the exterior of a circle including infinity (may
extend to include the origin in some cases)
H z hn z n , right - sided
n 0
if hn0 0, n0 0
H z includes xn0 z n0
– A system with rational H(z) is causal if and only
if
(1)ROC is the exterior of a circle outside the
outermost pole including infinity
and (2)order of N(z) ≤ order of D(z)
H(z) finite for z ∞
Causality (p.44 of 9.0)
– A causal system has an H(s) whose ROC is a righthalf plane
h(t) is right-sided
– For a system with a rational H(s), causality is
equivalent to its ROC being the right-half plane to
the right of the rightmost pole
– Anticausality
a system is anticausal if h(t) = 0, t > 0
an anticausal system has an H(s) whose ROC is a
left-half plane, etc.
Causality (p.45 of 9.0)
Z-Transform (p.6 of 10.0)
Stability
– A system is stable if and only if ROC of H(z)
includes the unit circle
Fourier Transform converges, or absolutely
summable
– A causal system with a rational H(z) is stable if and
only if all poles lie inside the unit circle
ROC is outside the outermost pole
Systems Characterized by Linear Difference
Equations
a yn k b xn k
N
k 0
M
k
k 0
k
Y z ak z k X z bk z k
N
M
k 0
k 0
H z
Y z
X z
M
k
b
z
k
k 0
N
a
k 0
k
z
k
zeros
poles
– difference equation doesn’t specify ROC
stability/causality helps to specify ROC
Interconnections of Systems
– Parallel
H1(z)
H(z)=H1(z)+H2(z)
H2(z)
– Cascade
H1(z)
H2(z)
H(z)=H1(z)H2(z)
Interconnections of Systems
– Feedback
+
-
+
H1(z)
H2(z)
H z
H1 z
1 H1 z H 2 z
Block Diagram Representation
– Example:
yn
1
4
yn 1
H z
8
yn 2 xn
1
1
1
4
1
2
1
z
1
z 2
8
1
1
1 1
1 1
1 z 1 z
4
2
1
3
3
1 1
1 1
1 z
1 z
4
2
– direct form, cascade form, parallel form
See Fig. 10.20, p.787 of text
10.4 Unilateral Z-Transform
X z u xn z n
unilat eralz - t ransform
k 0
X z
n
x
n
z
bilat eralz - t ransform
k
– Z{x[n]u[n]} = Zu{x[n]}
for x[n] = 0, n < 0, X(z)u = X(z)
ROC of X(z)u is always the exterior of a circle
including z = ∞
degree of N(z) ≤ degree of D(z) (converged for z = ∞)
10.4 Unilateral Z-Transform
– Time Delay Property (different from bilateral case)
xn 1 x 1 z 1 X z u
Zu
u
xn 2
x 2 x 1 z 1 z 2 X z u
Z
n 0
n 1
n
n
x
n
1
z
x
1
x
n
1
z
– Time Advance Property (different from bilateral
case)
xn 1 zX z
Zu
u
zx0
Time Delay Property/Time Advance Property
10.4 Unilateral Z-Transform
– Convolution Property
if x1 n x2 n 0, n 0
x1 n x2 n X 1 z u X 2 z u
Zu
this is not true if x1[n] , x2[n] has nonzero values for
n<0
Convolution Property
Examples
• Example 10.4, p.747 of text
n
xn 1 sin n un
4
3
n
n
1 1 e un 1 1 e un
2 j 3
2 j 3
3 12 z
1
X z
,
z
1 j4
1 j4
3
( z 3 e )(z 3 e )
j 4
j 4
Examples
• Example 10.6, p.752 of text
a n , 0 n N - 1, a 0
xn 0 , else
1 (az1 ) N 1 z N a N
X z
N 1
1
1 az
z z a
( N 1)st order pole at orgin
j 2Nπk
N - 1 zerosat zk ae
, k 1,2 ,...N-1
pot ent ialpole/zerocanceledat z a
ROC z 0
Examples
• Example 10.6, p.752 of text
Examples
• Example 10.17, p.772 of text
X z log 1 az1 , z a
1
z
dX
az
Z
, z a
z
nxn
1
dz
1 az
a
Z
, z a
a(a) n un
1
1 az
1
n 1
az
Z
, z a , t imeshift propert y
a(a) un 1
1
1 az
(a) n
un 1
xn
n
Examples
• Example 10.31, p.788 of text (Problem 10.38,
P.805 of text)
1 74 z 1 12 z 2
H z
1 14 z 1 18 z 2
1
7 1
1 2
1
z
4
2 z
1 1
1 2
1 4 z 8 z
Direct formrepresentation of thesystem
Problem 10.12, p.799 of text
Whichof thefollowingsystemis approximately
lowpass, highpass,or brandpass?
1
z
(a) H z
1 89 z 1
, z
1 89 z 1
(b) H z
, z
16 1
64 2
1 9 z 81 z
1
(c)H z
, z
64 2
1 81 z
8
9
8
9
8
9
Problem 10.12, p.799 of text
Problem 10.44, p.808 of text
(c)
x1 n x 2n
g n 1 x n ( 1) n x n
2
G z 1 X z X z
2
X 1 z
n
x
n
z
1
n
n
g
2n
z
n
g n z
n
n2
Gz
n: even
1
2
1
1
1
2
X z X - z2
2
Problem 10.46, p.808 of text
y n x n e8 xn 8 ,
H z 1 e z
8
8
e 1
8
8
z
e
,
8
z
z 0
8-th order pole at z=0 and 8 zeros
causal and stable
G z
8
1
G
z
1 e8 z 8
8-th order zero at z=0 and 8 poles
causal and stable
G z
1
1 e8 z 1
g n e8nun
g n g (8) n
e
8 8n
en , n 0,8,16,....
0 , else
Problem 10.46, p.808 of text
x[n]
y[n]
+
z
_
8
e
H(z)
8
……
y[n]
x[n]
e
8
z
8
G(z)