Section 2
advertisement

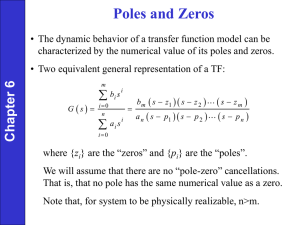
Chapter 2 Mathematical Foundation Automatic Control Systems, 9th Edition F. Golnaraghi & B. C. Kuo Section 2- 0, p. 16 Main Objectives of This Chapter 1. 2. To introduce the fundamentals of complex variables To introduce frequency domain analysis and frequency plots 3. To introduce differential equations and state space systems 4. To introduce the fundamentals of Laplace transforms 5. To demonstrate the applications of Laplace transforms to solve linear ordinary differential equations 6. To introduce the concept of transfer functions and how to apply them to the modeling of linear time-invariant systems 7. To discuss stability of linear time-invariant systems and the Routh-Hurwitz criterion 8. To demonstrate the MATLAB tools using case studies 2-1 Section 2- 1, pp. 16-17 2-1 Complex-Variable Concept • Rectangular form: z x jy (2-1) magnitude of z j 1 x R cos (2-2) y R sin (2-3) phase of z z R cos jR sin (2-4) • Euler formula: e j R cos jR sin (2-5) • Polar form: z Re j R (2-6) 2-2 Section 2- 1, p. 17 Conjugate of the Complex Number • Conjugate z x jy z * x jy z R cos jR sin e j z* R cos jR sin e j (2-8) (2-7) * 2 2 2 • zz R x y (2-9) 2-3 Section 2- 1, p. 18 Basic Mathematical Properties 2-4 Section 2- 1, p. 18 Examples 2-1-1 & 2-1-2 • Example 2-1-1 Find j3 and j4. • Example 2-1-2 Find zn using Eq. (2-6). (2-10) 2-5 Section 2- 1, p. 19 Complex s-plane 1 1 2-6 Section 2- 1, p. 19 Function of a Complex Variable • G(s) = Re[G(s)] + jIm[G(s)] • Single-valued function: (2-11) one-to-one mapping 1 • Not single-valued function: G( s) s( s 1) (2-12) 2-7 Section 2- 1, p. 20 Analytic Function • A function G(s) of the complex variable s is called an analytic function in a region of the s-plane if the function and its all derivatives exist in the region. • G(s) = 1/[s(s+1)] is analytic at every point in the s-plane except at the points s = 0 and s = 1. • G(s) = (s+2) is analytic at every point in the s-plane. 2-8 Section 2- 1, p. 20 Poles and Zeros of a Function • A pole of order r at s = pi if the limit lim [( s pi ) r G( s)] s pi has a finite, nonzero value. r • A zero of order r at s = zi if the limit lim [( s zi ) G( s)] s zi has a finite, nonzero value. • Example: (2-13) 2-9 Section 2- 1, p. 22 Polar Representation Polar representation of G(s) in Eq. (2-12) at s = 2j. (2-15) (2-16) (2-17) 2-10 Section 2- 1, pp. 22-23 Example 2-1-3 16 Polar representation of G ( s) for s = j, ( s 2)( s 8) = 0 . j 8 R2 ( j sin 2 cos2 ) 2-11 Section 2- 1, p. 23 Example 2-1-3 (cont.) • Graphical representation of G(j) 2-12 Section 2- 1, p. 24 Example 2-1-3 (cont.) • The magnitude decreases as the frequency increases. • The phase goes from 0º to 180º. 2-13 Section 2- 1, p. 24 Example 2-1-3 (cont.) • Alternative approach 2-14 Section 2- 1, p. 24 Example 2-1-3 (cont.) 2-15 Section 2- 1, p. 26 Frequency Response • G(j) is the frequency response function of G(s) . • Second order system: • General case: 2-16 Section 2- 2, p. 26 2-2 Frequency-Domain Plots • magnitude phase • Frequency-domain plots of G(j) versus : – Polar plot – Bode plot – Magnitude-phase plot 2-17 Section 2- 2, p. 27 Polar Plots • A plots of the magnitude of G(j) versus the phase of G(j) on polar coordinates as is varied from zero to infinity. 2-18 Section 2- 2, p. 27 Example 2-2-1 Consider the function G ( s ) 1 , where T > 0. 1 Ts 2-19 Section 2- 2, p. 28 Example 2-2-2 Consider the function G ( j ) 1 jT2 , where T1, T2 > 0. 1 jT1 2-20 Section 2- 2, p. 28 General Shape of Polar Plot • The behavior of the magnitude and phase of G(j) at = 0 and = . • The intersections of the polar plot with the real and imaginary axes, and the values of at the intersections. – Intersections with the real axis: Im[G(j)] = 0 – Intersections with the imaginary axis: Re[G(j)] = 0 2-21 Section 2- 2, p. 30 Example 2-2-3 10 Consider the transfer function G ( s) s( s 1) 1. The magnitude and phase of G(j) at = 0 and = 2. Determine the intersections, if any. Re[G(j)] = 0 = , G(j) = 0; Im[G(j)] = 0 = 2-22 Section 2- 2, p. 30 Example 2-2-3 (cont.) 2-23 Section 2- 2, p. 31 Example 2-2-4 1. 10 s( s 1)( s 2) The magnitude and phase of G(j) at = 0 and = 2. Determine the intersections, if any. Consider the transfer function G ( s) Re[G(j)] = 0 = , G(j) = 0 Im[G(j)] = 0 = 2 rad/sec, G( j 2 ) 5 3 2-24 Section 2- 2, p. 31 Example 2-2-4 (cont.) 2-25 Section 2- 2, p. 32 Bode Plot • Bode plot of function G(j) is composed of two plots: – The amplitude of G(j) in dB versus log10 or – The phase of G(j) in degree as a function of log10 or • Bode plot corner plot or asymptotic plot • For constructing Bode plot manually, G(s) is preferably written in the form of (2-61). 2-26 Section 2- 2, p. 32-33 Magnitude and Phase of G(j): Example • Magnitude of G(j) in dB: • Phase of G(j): 2-27 Section 2- 2, p. 34 Five Simple Types of Factors 1. Constant factors: K 2. Poles or zeros at the origin of order p: (j)p 3. Poles or zeros at s = 1/T of order q: (1+jT)q 4. Complex poles and zeroes of order r: (1+j2/n2/2n)r 5. Pure time delay: e jTd 2-28 Section 2- 2, p. 34 Real Constant K: Magnitude 2-29 Section 2- 2, p. 34 Real Constant K: Phase 2-30 Section 2- 2, p. 34 Poles and Zeros at the Origin: Magnitude Slope: 2-31 Section 2- 2, p. 36 Poles and Zeros at the Origin: Phase 2-32 Section 2- 2, p. 35 Decade versus Octave 2-33 Section 2- 2, p. 37 Simple Zero, 1+jT Consider the function G(j) = 1+jT (2-74) • Magnitude: – At very low frequencies, T << 1: – At very high frequencies, T >> 1: – Intersection of (2-76) and (2-77): = 1/T (2-78) • Phase: 2-34 Section 2- 2, p. 38 Values of (1+jT) versus T 2-35 Section 2- 2, p. 39 Simple Pole, 1/(1+jT) For the function G(j) = 1/(1+jT) • Magnitude: (2-80) • Phase: G( j) tan1 T 2-36 Section 2- 2, p. 38 Bode plots of G(s)=1+Ts & G(s)=1/(1+Ts) 2-37 Section 2- 2, p. 39 Quadratic Poles and Zeros: Magnitude Consider the second-order transfer function 1 • Magnitude: – At very low frequencies, T << 1: – At very high frequencies, T >> 1: 2-38 Section 2- 2, p. 40 Quadratic Poles and Zeros: Magnitude 2-39 Section 2- 2, p. 40 Quadratic Poles and Zeros: Phase • Phase: 2-40 Section 2- 2, p. 42 Pure Time Delay jTd e 1 • Magnitude: • Phase: e jTd Td (2-90) • For the transfer function G( j ) G1 ( j )e jTd (2-91) G( j ) G1 ( j ) G( j ) G1 ( j ) Td 2-41 Section 2- 2, pp. 42-43 Example 2-2-5 Consider the function corner frequencies: = 2, 5, and 10 rad/sec 2-42 Section 2- 2, p. 43 Example 2-2-5 (cont.) 2-43 Section 2- 2, pp. 44-45 Magnitude-Phase Plot Example 2-2-6: Polar plot Magnitude-phase plot 2-44 Section 2- 2, p. 46 Gain- and Phase-Crossover Points • Gain-crossover point: the point at which G( j ) 1 – Gain-crossover frequency g • Phase-crossover point: the point at which G( j ) 180 – Phase-crossover frequency p 2-45 Section 2- 2, p. 47 Minimum- & Nonminimum-Phase • Minimun-phase transfer function: no poles or zeros in the right-half s-plane – Unique magnitude-phase relationship – For G(s) with m zeros and n poles, excluding the pole at s = 0, when s = j and = 0 , the total phase variation of G(j) is (nm)/2. – G(s) 0, if 0. • Nonminimun-phase transfer function: has either a pole or a zero in the right-half s-plane – a more positive phase shift as = 0 2-46 Section 2- 2, p. 47 Example 2-2-7 90 270 Minimum-phase transfer function Nonminimum-phase transfer function 2-47 Section 2- 3, p. 49 2-3 Introduction to Differential Eqs. • Linear ordinary differential equation: – Coefficients a0, a1, …, an1 are not function of y(t) – First-order linear ODE: – Second-order linear ODE: • Nonlinear differential equation: 2-48 Section 2- 3, p. 50 State Equations: Second-Order • Differential equation of a series electric RLC network: • State variables: • State equations: di (t ) 1 R 1 i (t )dt i (t ) e(t ) dt LC L L 2-49 Section 2- 3, p. 50 State Equations: nth-Order • The nth-order differential equation: • State variables • State equations 2-50 Section 2- 3, p. 51 Space State Form • Space state form for n state variables: state vector coefficient matrix input vector 2-51 Section 2- 3, p. 52 Output Equation • General form: • Output equation of the system described by Eq. (2-97): y(t ) x1 (t ) 2-52 Section 2- 4, p. 52,54 2-4 Laplace Transform • Condition: • Definition: • Inverse Laplace Transform: 2-53 Section 2- 4, p. 53 Examples 2-4-1 & 2-4-2 • Example 2-4-1: f(t) = unit-step function • Example 2-4-2: f(t) = exponential function R 2-54 Section 2- 4, p. 54 Important Theorems Theorem 1. Multiplication by a Constant Theorem 2. Sum and Difference Theorem 3. Differentiation 2-55 Section 2- 4, p. 55 Important Theorems (cont.) Theorem 4. Integration Theorem 5. Shift in Time Theorem 6. Initial-Value Theorem: Theorem 7. Final-Value Theorem: 2-56 Section 2- 4, pp. 55-56 Examples 2-4-3 & 2-4-4 • Example 2-4-3: sF(s) is analytic on the imaginary axis and in the righthalf s-plane • Example 2-4-4: f(t)= sint sF(s) has two poles on the imaginary axis of the s-plane the final-value theorem cannot be applied in this case 2-57 Section 2- 4, pp. 56-57 Important Theorems (cont.) Theorem 8. Complex Shift Theorem 9. Real Convolution (Complex Multiplication) 2-58 Section 2- 5, pp. 57-58 2-5 Inverse Laplace Transform by Partial-Fraction Expansion Partial-Fraction Expansion: – The order of P(s) is greater than that of Q(s) • G(s) Has Simple Poles: s1 s2 sn 2-59 Section 2- 5, p. 58 Example 2-5-1 2-60 Section 2- 5, p. 59 G(s) Has Multiple-Order Poles i 1,2,..., n r 2-61 Section 2- 5, p. 60 Example 2-5-2 2-62 Section 2- 5, p. 61 G(s) Has Simple Complex-Conjugate Poles • G(s) contains a pair of complex poles: s j 2-63 Section 2- 5, pp. 61-62 Example 2-5-3 • The second-order prototype function: 2-64 Section 2- 6, p. 62 2-6 Application of the Laplace Transform to the Solution of Linear ODEs • Procedure: 1. Transform the differential equation to the s-domain by Laplace transform using Laplace transform table. 2. Manipulate the transformed algebra equation and solve for the output variable. 3. Perform partial-fraction expansion to the transformed algebra equation. 4. Obtain the inverse Laplace transform from the Laplace transform table. 2-65 Section 2- 6, p. 63 First-Order Prototype System • First-order prototype form: : time constant • Example 2-6-1: Find the solution of Eq. (2-179) for a unit step function Step 1 Step 2 Step 3 Step 4 2-66 Section 2- 6, p. 63 Typical Unit-Step Response 2-67 Section 2- 6, pp. 64-65 Second-Order Prototype System • 2nd-order prototype form: : damping ratio; n: natural frequency • Example 2-6-2: y (0) 1 us(t): unit step function; initial conditions: (1) y (0) 2 Step 1 Step 2 Step 3 Step 4 2-68 Section 2- 6, p. 65 Example 2-6-3 The initial value of y(t) and dy(t)/dt are zero. Method 1: Using Laplace transform table 2-69 Section 2- 6, p. 66 Example 2-6-3 (cont.) Method 2: Using partial-fraction expansion 2-70 Section 2- 6, p. 66 Example 2-6-3 (cont.) Method 2: Using partial-fraction expansion (cont.) 2-71 Section 2- 7, p. 68 2-7 Impulse Response & Transfer Functions of Linear Systems • Impulse function: uˆ as 0 2 • Dirac delta function: (t) For uˆ 1, u(t ) (t ) • Laplace transform of (t) is unity, i.e., 2-72 Section 2- 7, pp. 68-69 Impulse Response • Impulse response: the output when the input is a unitimpulse function (t). ( initial condition = 0) • The response of any system can be characterized by its impulse response, g(t). G(s): transfer function Y ( s) G( s) R( s) y(t ) g (t ) r (t ) • Example 2-7-1: transfer function: impulse response: unit-step response: 2-73 Section 2- 7, p. 70 Transfer function (SISO systems) • The transfer function of a LTI system is defined as the Laplace transform of the impulse response, with all the initial conditions set to zero. • Input-output relation of a LTI system with zero initial conditions: • Characteristic Equation: 2-74 Section 2- 7, pp. 71-72 Transfer Function (Multivariable Syst.) A linear system has p inputs and q outputs: • The transfer function between jth input and ith output: Rk (s) 0, k 1,2,..., p, k j. • The ith output transform: • Matrix-vector form: 2-75 Section 2- 8, p. 72 2-8 Stability of Linear Control Systems • Absolute stability • Relative stability • Two types of response for LTI systems: – Zero-state response – Zero-input response • Total response = zero-state response + zero-input response 2-76 Section 2- 9, p. 73 2-9 BIBO Stability • With zero initial conditions, the system is said to be BIBO (bounded-input, bounded output) stable, or simple stable, if its output y(t) is bounded to a bounded input u(t). • • u(t) is bounded: • y(t) is bounded: • Condition: 2-77 Section 2- 10, p. 74 2-10 Relationship Between Characteristic Equation Roots and Stability • For BIBO stability, the roots of the characteristic equation, or the poles of G(s), must all lie in the left-half s-plane. • A system is said to be unstable if it is not BIBO stable. • When a system has roots on the j-axis, e.g., s = j0, if the input is a sinusoid, sin 0t, then the output will be of the form of tsin 0t, which is unbounded, and the system is unstable. 2-78 Section 2- 11, p. 75 2-11 Zero-input and Asymptotic Stability • Zero-input stability: yZI (t ) 0 as t If the zero-input response y(t), subject to the finite initial conditions, y(k ) (t0 ) , reaches zero as t approaches infinity. • Condition: the roots of the characteristic equation must all be in the left-half s-plane • Zero-input stability = Asymptotic stability • Marginally stabile or marginally unstable: The characteristic equation has simple root on j-axis and none in the right-half s-plane. 2-79 Section 2- 11, p. 76 Stability Conditions (BIBO stable) 2-80 Section 2- 11, p. 76 Example 2-11-1 2-81 Section 2- 12, p. 77 2-12 Methods of Determining Stability Stability of LTI SISO systems: • Checking the location of the roots of the characteristic equation of the system • Without involving root solving: – Routh-Hurwitz criterion – Nyquist criterion – Bode diagram 2-82 Section 2- 13, p. 78 2-13 Routh-Hurwitz Criterion • A method of determining the location of zeros of a polynomial with constant real coefficients, without actually solving for the zeros. • Necessary but not sufficient conditions: – All coefficients of the equation have the same sign – None of the coefficients vanish 2-83 Section 2- 13, p. 79 Routh’s Tabulation (1/2) • Step 1: The 1st row consists of the 1st, 3rd, 5th, …, coefficients The 2nd row consists of the 2nd, 4th, 6th, …, coefficients • Step 2: Routh’s tabulation (Routh’s array) • Example: 2-84 Section 2- 13, p. 79 Routh’s Tabulation (2/2) • Step 3: Investigate the signs of the coefficients of the 1st column • The root of the root all in the left half of the s-plane if all the elements of the 1st column of the Routh’s tabulation are of the same sign. • The number of changes of signs in the elements of the 1st column equals the number of roots with positive real parts, or those in the right-half s-plane. 2-85 Section 2- 13, p. 80 Example 2-13-1 • • Routh’s tabulation: • Two sign changes in the 1st column Two roots in the right half of the s-plane • Four roots of Eq. (2-253): s = 1.005 j0.933 and s = 0.755 j1.444 2-86 Section 2- 13, p. 81 Special Cases when Routh’s Tabulation Terminates Prematurely 1. The first element in any one row of Routh’s tabulation is zero, but the others are not. 2. The elements in one row of Routh’s tabulation are all zero. – At least one pair of real roots with equal magnitude but opposite signs. – One or more pairs of imaginary roots. – Pairs of complex-conjugate roots forming symmetry about the origin of the s-plane, e.g., s = 1 j1, s = 1 j1 2-87 Section 2- 13, p. 81 Special Case 1 & Example 2-13-2 The first element in any one row of Routh’s tabulation is zero, but the others are not. Replace the zero element of the first column by an arbitrary small positive number , and then proceed with Routh’s tabulation. • Example 2-13-2: • Two sign changes in the 1st column Two roots in the right half of the s-plane • Four roots of Eq. (2-254): s = 0.091 j0.902 and s = 0.406 j1.293 2-88 Section 2- 13, pp. 81-82 Special 2 The elements in one row of Routh’s tabulation are all zero. 1. Form the auxiliary equation A(s) = 0 by using the coefficients of the row just preceding the row of zeros. 2. Take the derivative: dA(s) / ds = 0 3. Replace the row of zeros with the coefficients of dA(s) / ds = 0. 4. Continue with Routh’s tabulation with the newly formed row of coefficients replacing the row of zeros. 5. Interpret the change of signs, if any, of the coefficients in the first column of Routh’s tabulation. 2-89 Section 2- 13, p. 82 Example 2-13-3 • • No sign change in the first column No root in the right-half s-plane. • Roots of A(s): s = j which are also twos of the roots of Eq. (2-255) 2-90 Section 2- 13, pp. 82-83 Example 2-13-4 • Determine the critical value of K for stability: Sol: 2-91 Section 2- 13, pp. 83-84 Example 2-13-5 • Consider the characteristic equation of a close-loop control system is Find the range of K so that the system is stable. Sol: disregarded 2-92