Chapter_6_Chang
advertisement

Poles and Zeros
• The dynamic behavior of a transfer function model can be
characterized by the numerical value of its poles and zeros.
Chapter 6
• Two equivalent general representation of a TF:
m
G s
bi s
i
i0
n
ai s
i
s zm
p2 s pn
b m s z1 s z 2
a n s p1 s
i0
where {zi} are the “zeros” and {pi} are the “poles”.
We will assume that there are no “pole-zero” cancellations.
That is, that no pole has the same numerical value as a zero.
Note that, for system to be physically realizable, n>m.
Example: 4 poles (denominator is 4th order
polynomial) & 0 zero (numerator is a const)
G (s)
K
s ( 1 s 1)( 2 s 2 2 s 1)
s1 0; s 2
2
1
1
2
; s3 , s 4
2
j
1
2
2
Y s G s U s
If u t M S t , then
y t A0 A1t B e
t
1
e
2
t
C 1 sin
1
2
2
t C 2 cos
1
2
2
t
Chapter 6
Effects of Poles on System
Response
(1)
2
1
1
e
t
1
decays slow er than e
2
t
(2) R H P pole unstable system
(3) com plex conjugate poles oscillation
(4) origin integrating elem ent
Example of Integrating
Element
A
dh
dt
qi q0
A sH ( s ) Q i( s ) Q 0 ( s )
if Q 0 ( s ) 0
then
H ( s )
Q i( s )
1
As
pure integrator (ramp) for step
change in qi
Cause of Zeros – Input
Dynamics
[E xam ple 1]
G s
K a s 1
1s 1
[E xam ple 2]
G s
1 y y K a u u
1
1 y y K
a
K a s 1
a s 1 s 1
0 u d u
t
Some Facts about Zeros
• Zeros do not affects the number and
locations of the poles, unless there is an
exact cancellation of a pole by a zero.
• The zeros exert a profound effect on the
coefficients of the response modes.
Example of 2nd-Order Overdamped
System with One (1) Zero
Y s G s U s
K a s 1
M
1 s 1 2 s 1
s
w here 1 2
t
t
a 1 1 a 2 2
y t KM 1
e
e
1 2
2 1
and
y KM
C ase (a): a 1 overshoot
C ase (b): 1 a 0 sim ilar to 1st-order step re sponse
C ase (c): a 0 inverse response
Chapter 6
Step Response of 2nd-Order
Overdamped System without Zeros
u t MS t U s
1 G s
=
M
s
K
1 s 1 2 s 1
1
1 2
1 2
2 1 2
y t L
1
G s U s
t /
t /
1e 1 2 e 2
KM 1
1
2
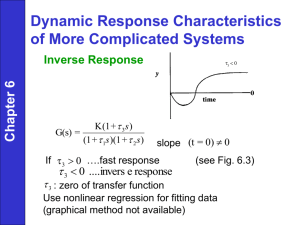
Further Analysis of Inverse
Response
Y s G s U s
K a s 1
M
1 s 1 2 s 1
s
w here 1 2 0, a 0, K M 0
K M a s 1
dy
L
sY
s
1 s 1 2 s 1
dt
B y initial value theorem
dy
dt
t 0
a
K M a s 1
dy
lim s L
s
s
1 s 1 2 s 1
dt
KM
1 2
0
Chapter 6
Common Properties of Overshoot
and Inverse Responses
O vershoot or inverse response can be exp ected
w henever there are tw o physical effects that act
on the sam e output in opposite w ays and w ith
different tim e scales, i.e.
(1) sgn K 1 sgn K 2
(2) 1 2
Another Example
Y s G s U s
y t K M 1
y 0
a
1
K a s 1 M
1 s 1
t
a 1
1
e
1
K M (jum p ) and
s
y KM
C ase (a): a 1 0 decr easing
C ase (b): 1 a 0 increasing
C ase (c): a 0 1 increasing
Time Delays
Time delays occur due to:
1. Fluid flow in a pipe
Chapter 6
2. Transport of solid material (e.g., conveyor belt)
3. Chemical analysis
-
Sampling line delay
-
Time required to do the analysis (e.g., on-line gas
chromatograph)
Mathematical description:
A time delay, θ, between an input u and an output y results in the
following expression:
0
y t
u t θ
for t θ
for t θ
Y s
U s
e
s
Chapter 6
Implication of Time Delay
The presence of time delay in a process
means that we cannot factor the
transfer function in terms of simple
poles and zeros!
Polynomial Approximation of
Time Delays
T alo r series ex p an sio n :
s
2
e
s
1 s
s
2
3
2!
3
3!
1 /1 P ad e ap p ro x im atio n :
e
s
1 s / 2
1 s / 2
2 /2 P ad e ap p ro x im atio n :
1 s / 2 s / 12
2
e
s
2
1 s / 2 s / 12
2
2
Chapter 6
Approximation of nth-Order
Systems
A n-th order system w ith n equal tim e co nstants:
Gn s
K
s
1
n
n
n t n 1
nt /
M
1
y n, t L G n s
K M 1 e
s
i!
i0
y ,t KMS t
lim G n s e
n
s
i
Chapter 6
Approximation of Higher-Order Transfer
Functions
In this section, we present a general approach for
approximating high-order transfer function models with
lower-order models that have similar dynamic and steady-state
characteristics.
Previously we showed that the transfer function for a time
delay can be expressed as a Taylor series expansion. For small
values of s,
(A)
e
θ0s
1 θ0s
(zero)
An alternative first-order approximation is
(B )
e
θ0s
1
e
θ0s
1
1 θ0s
(pole)
Skogestad’s “Half Rule”
Chapter 6
1. Largest neglected time constant
•
One half of its value is added to the existing time delay (if
any) .
•
The other half is added to the smallest retained time
constant.
2. Time constants that are smaller than those in item 1.
•
Use (B)
3. RHP zeros.
•
Use (A)
Example 6.4
Consider a transfer function:
Chapter 6
G s
K 0.1 s 1
5 s 1 3 s 1 0.5 s 1
Derive an approximate first-order-plus-time-delay (FOPDT)
model,
G s
Ke
θs
τs 1
using two methods:
(a) The Taylor series expansions (A) and (B).
(b) Skogestad’s half rule
Compare the normalized responses of G(s) and the approximate
models for a unit step input.
Solution
(a) The dominant time constant (5) is retained. Applying
the approximations in (A) and (B) gives:
Chapter 6
0.1s 1 e
0.1 s
and
1
3s 1
e
1
3s
0.5 s 1
e
0.5 s
Substitution into G(s) gives the Taylor series approximation,
GT S s
Ke
0.1 s 3 s 0.5 s
e
5s 1
e
Ke
3.6 s
5s 1
(b) To use Skogestad’s method, we note that the largest neglected
time constant in G(s) has a value of three.
• According to “half rule” (Rule 1), half of this value is added to
the next largest time constant to generate a new time constant
Chapter 6
τ 5 0.5(3) 6.5.
• Rule 1: The other half provides a new time delay of 0.5(3) = 1.5.
• The approximation of the RHP zero in Rule 3 provides an
additional time delay of 0.1.
• Approximating the smallest time constant of 0.5 in G(s) by
Rule 2 produces an additional time delay of 0.5.
• Thus the total time delay is, θ 1.5 0.1 0.5 2.1
• Therefore
G Sk s
Ke
2.1 s
6.5 s 1
Chapter 6
Example
G s
K 1 s e
s
1 2 s 1 3 s 1 0.2 s 1 0.05 s 1
(a) G 1 s
(b) G 2 s
Ke
s
(FO P D T )
s 1
Ke
s
1 s 1 2 s 1
(S O P D T )
Part (a)
1
3
0 .2 0 .0 5 1 3 .7 5
2
12
3
1 3 .5
2
G1 s
Ke
3 .7 5 s
1 3 .5 s 1
Part (b)
1
0.2
0.05 1 2.15
2
1 12
2 3
G2 s
0.2
3.1
2
Ke
2.15 s
12 s 1 3.1 s 1