Introduction
Sir George Cayley
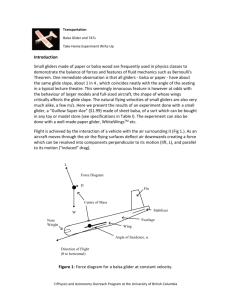
Conventional configuration
Otto Lilienthal
Airfoil data, first pilot
Alphonse Penaud
Rubber powered models
Octave Chanute
Pratt truss
Wright Brothers
Control centric approach
Wing warping for roll control
First wind tunnel tests
Adverse yaw
Canard for pitch control
The Wright approach
Wing warping tested on 1899 kite
1901 glider was a disappointment
Wind tunnel testing leads to 1902
glider
First powered flight, 1903
Problems in replication
Instability
Pitch, CG behind NP
Spiral mode, Anhedral
Control
Smaller tail volumes
Constructional
Practical limits due to scaling down
Strategy
S ta rt
E xp lo re A irp la n e
th ro u g h lite ra tu re
s u rve y
B u ild G lid e rs
P re lim R e p o rt, A p r 2 0 0 2
M ay 2002
P ro p u ls io n
G lid e r T e s tin g
F in a l D e s ig n , N o v 2 0 0 2
D e ta ile d R e p o rt, D e c 2 0 0 2
M odel
Backup M odel
F lig h t te s tin g , J u n e 2 0 0 3
D one, N ov2003
Strategy
Exploring a/c
Literature study
Proposed solutions
Making gliders
Material selection
Practical limits on fabrication
Implementation of control mechanisms
Propulsion
Market survey for
Contra-rotating pushers
Belts, pulleys and shafts
Engine
Test the setup
Glider Specifications
1:12 scaled down model
Wing Span 1.02 m
Length 0.54m
Canard area 6.3% of wing area, 0.0210 m2
Rudder area 0.01 m2
Weight 0.15 Kg
Ballast weight 0.040 Kg
Wing loading 0.11 kg/m2
Glider
Glider Experience
Material selection
Central carbon fibre box supporting
Wing
Canard and rudder
Engine
Landing gear
Central Box
Glider Experience
Material selection
Balsa wood used for
Wing ribs
Canard and rudder
Vertical struts
Glider Experience
Monokote for wing covering
Slotted ribs for front spar
Joints
Strut-spar pin joints replicated
Pins lashed to spars and struts
Rigging with twine thread
View of joints
Glider Experience
Controls
Steel wire for wing warping
Flexible joints in rear spar for wing
warping
Complete canard moved for pitch control
(unlike original variable camber)
Weight estimation
Controls part
4 servos + Receiver+ Battery pack + Miscellaneous
160gm + 30gm + 120gm
+ 50gm
=360 gm
Propulsion part
Engine + Mount + Shafts, Belts, Pulleys + Fuel + Misc
335gm + 150gm+ 300gm+ 250gm+ 65gm
=1100 gm
Landing gear
= 150gm
Structure part
Carbon fiber composite + Balsa + Misc
450gm
+ 300gm + 250gm
=1000gm
Total Maximum weight
= 3 kg
Wing loading with this weight = 0.338 kg/m2
Thrust and Power Estimation
Max thrust required at min Cl/Cd = 12 N
Power required at this Cl/Cd is 120 W
Engine of 250 W at 16000 rpm
Two 10X6 props at 8000 rpm give 15 N
thrust
-12
2
4
Thrust in lbs = 2.83x10
x RPM x D x Cp x (P/29.92) x
(528/(460+T))
Propulsion
Electric motor
Less weight
No starting problems
Ease of maintenance
Large battery weight (Can be used as ballast)
Lesser heating problems
Propulsion
Wankel IC engine
High power
Less fuel weight
Cooling problems ?
Propulsion
Belt pulley system
Propeller shaft mounting replicated
Contra-rotating propellers ?
Side view
transmission system
9.3 cm
4 cm
11 cm
6 cm
25 cm
Front View
23.5 cm
12 cm
5 cm
39.4 cm
Unsolved problems
Roll-yaw coupling ?
Asymmetric yawing moment ?
Pitch SAS using rate gyro?
Tail and canard volumes ?
Anhedral ?
Landing ?
Twisted belt drive ?
Cost Estimate
Carbon fibre
2000
Balsa
500
Engines
8000
Belt, Pulleys,
Bearings, Propeller
Servos
2900
Miscellaneous
500
Total
17,900
4000
Acknowledgements
Prof. K. Sudhakar, IIT Bombay
Dr. H. Arya, IIT Bombay
 0
0