hp1f2013_class14_rigid_body_rotation
advertisement

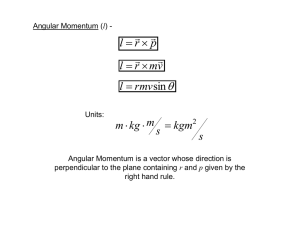
Honors Physics 1 Class 14 Fall 2013 The rotating skew rod Rotational Inertia Tensor Stability of spinning objects The spinning top in gravity 1 The angular momentum vector and angular velocity do not necessarily point in the same direction Consider a rigid body consisting of two particles of equal mass on the ends of a massless rigid rod of length 2l . The midpoint of the rod is attached to a vertical axis which rotates at angular speed . The rod is skewed at an angle from the axis. Find the angular momentum of the system. L ri p i i E ach m ass m oves in a circle of radius l co s w ith angular speed . p i m l cos T aking the m idpoint of the rod as origin , r l . 2 L 2 m l cos . L is perpendicular to the rod and lies in the plan e of rod and the z axis. L turns w ith the rod and traces a circle about the z axis. 2 In the previous exam ple, w e point out th at L is not parallel to . T his is generally the case for non-sym m e tric bodies. T he fact that L rotates m eans that there m ust be a torque on it. T he com ponent o f L , L z , parallel to the z axis is constant . T he horizontal com ponent L h = L sin rotates w ith the rod. C hoosing a starting phase, L x L h cos t L sin cos t L y L sin sin t L L sin cos tiˆ sin tjˆ L cos kˆ and the torque is = dL dt L sin sin tiˆ cos tjˆ so L sin T he larger the angular m om entum , the m or e torque to rotate. 3 Geometric interpretation of precession of the skewed rod Lh (t t ) Lh Lh (t ) Lh Lh dL h dt Lh d dt Lh so L sin and points along the tangent in the xy plane. R em em ber that r F , so F points at right ang les to the change in L. 4 Moment of Inertia Tensor B ecause w e have found a case w here L is not parallel to L I should be m odified. T he proper expression is L I w here I is a 3x 3 m atrix. I xx I I yx I zx I xx I xy I yy I zy I xz I yz I zz 2 x ( x , y , z ) d xdydz body I xy xy ( x , y , z ) dxdydz I yx product of inertia body L x I xx x I xy y I xz z N ote: It is alw ays possible to find a se t of three orthogonal axes about w hich the products of inertia are zero. 5 The spinning bicycle wheel (Gyroscope) T he angular m om entum is along the axis o f the spinning w heel. (horizontal if w e did it right) T he torque r m g about the support point is d ue to the w eight and is at right angles to L and g. S ince is at right angles to L, the m agnitude of L does not change. A ssum ing that all of the m ass of the w he el is at a distance R from the axis and a distance D from the support point. 2 L= M R ; D W L ; DW MR 2 6 Moment of inertia of various objects T he m om ent of a bicycle w heel is easy. T he m ass is all at a distance of the radius: I MR 2 A disk requires a little m ore w ork: I rr 2 drd 2 r 3 dr 2 R 4 4 MR 2 2 A rectangular plate is solved using the para llel axis theorem for one of the dim ensional integrals and I cm I p la te 1 12 M 2 2 Lx L y 1 12 M Lx 2 for a rod. 7 Stability of spinning objects F Applications: Rolling hula hoops, flying saucers, footballs, rifle bullets... C onsider a cylinder m oving parallel to its axis and w hat happens if w e exert a sm all perturbing force at right angles to the cylinder axis for a short tim e t. In the case w here the cylinder is not in iti ally spinning F l so L A t F l t so = Flt . IA If the cylinder is rapidly spinning w ith angular m om entum L s . T orque causes precession w hile the torqu e is applied = Fl so the axis rotates by = t= Ls Flt . Ls Instead of tum bling, the cylinder change s orientation slightly and then stops precessing. N ote that spin has no effect on center o f m ass m otion. 8