tracking_cos429 - Princeton Vision Group
advertisement

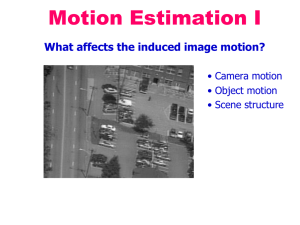
Where have all the flowers gone? (motion and tracking) Computer Vision COS429 Fall 2014 10/02 Guest lecture by Andras Ferencz Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski, Martial Hebert, Mark Pollefeys, and others Motivation: Mobileye Camera-based Driver Assistance System Safety Application based on single forward looking camera: • Lane Detection - Lane Departure Warning (LDW) - Lane Keeping and Support • Vehicle Detection - Forward Collision Warning (FCW) - Headway Monitoring and Warning - Adaptive Cruise Control (ACC) - Traffic Jam Assistant - Emergency Braking (AEB) • Pedestrian Detection - Pedestrian Collision Warning (PCW) - Pedestrian Emergency Braking Under the Hood: what we detect For Videos, visit www.mobileye.com Detect... Detect … Detect... Or Track? Once target has been located, and we “learn” what it looks like, should be easier to find in later frames... this is object tracking. Future Image Frame Template Approaches to Object Tracking Motion model (translation, translation+scale, affine, non-rigid, …) Image representation (gray/color pixel, edge image, histogram, HOG, wavelet...) Distance metric (L1, L2, normalized correlation, Chi-Squared, …) Method of optimization (gradient descent, naive search, combinatoric search...) What is tracked: whole object or selected features Template Distance Metric • Goal: find in image, assume translation only: no scale change or rotation, using search (scanning the image) • What is a good similarity or distance measure between two patches? Matching with filters Goal: find in image • Method 0: filter the image with eye patch h[m, n] g[k , l ] f [m k , n l ] k ,l f = image g = filter What went wrong? response is stronger for higher intensity Input Filtered Image 0-mean filter • Goal: find in image • Method 1: filter the image with zero-mean eye h[m, n] ( f [k , l ] f ) ( g[m k , n l ] ) k ,l mean of f True detections False detections Input Filtered Image (scaled) Thresholded Image L2 • Goal: find in image • Method 2: SSD h[m, n] ( g[k , l ] f [m k , n l ] )2 k ,l True detections Input 1- sqrt(SSD) Thresholded Image L2 • Goal: find in image • Method 2: SSD h[m, n] ( g[k , l ] f [m k , n l ] )2 k ,l One potential downside of SSD: Brightness Constancy Assumption Input 1- sqrt(SSD) Normalized Cross-Correlation • Goal: find in image • Method 3: Normalized cross-correlation (= angle between zero-mean vectors) mean template h[ m, n] mean image patch ( g[k , l ] g )( f [m k , n l ] f m ,n ) k ,l 2 2 ( g[ k , l ] g ) ( f [ m k , n l ] f m,n ) k ,l k ,l Matlab: normxcorr2(template, im) 0.5 Normalized Cross-Correlation • Goal: find in image • Method 3: Normalized cross-correlation True detections Input Normalized X-Correlation Thresholded Image Normalized Cross-Correlation • Goal: find in image • Method 3: Normalized cross-correlation True detections Input Normalized X-Correlation Thresholded Image Search vs. Gradient Descent • Search: – Pros: Free choice of representation, distance metric; no need for good initial guess – Cons: expensive when searching over complex motion models (scale, rotation, affine) • If we have a good guess, can we do something cheaper? – Gradient Descent Lucas-Kanade Object Tracker • Key assumptions: • Brightness constancy: projection of the same point looks the same in every frame (uses SSD as metric) • Small motion: points do not move very far (from guessed location) • Spatial coherence: points move in some coherent way (according to some parametric motion model) • For this example, assume whole object just translates in (u,v) Template The brightness constancy constraint I(x,y,t) I(x,y,t+1) • Brightness Constancy Equation: I ( x , y , t )= I ( x+ u , y + v ,t+ 1 ) Take Taylor expansion of I(x+u, y+v, t+1) at (x,y,t) to linearize the right side: Image derivative along x Difference over frames I ( x+ u , y + v ,t + 1)≈ I ( x , y , t )+ I x⋅ u+ I y⋅ v + I t I ( x+ u , y + v ,t + 1)− I ( x , y ,t )=+ I x⋅ u+ I y⋅ v+ I t Hence, I x⋅ u+ I y⋅v+ I t ≈ 0 T →∇ I⋅ [u v ] + I t = 0 How does this make sense? T ∇ I⋅ [u v ] + I t = 0 • What do the static image gradients have to do with motion estimation? Intuition in 1-D Frame t+1 Intensity Error: It Frame t X position Ix Solve for u in: I x⋅ u+ I t ≈ 0 The brightness constancy constraint Can we use this equation to recover image motion (u,v) at each pixel? T ∇ I⋅ [u v ] + I t = 0 • How many equations and unknowns per pixel? •One equation (this is a scalar equation!), two unknowns (u,v) The component of the motion perpendicular to the gradient (i.e., parallel to the edge) cannot be measured If (u, v) satisfies the equation, so does (u+u’, v+v’ ) if gradient (u,v) ∇ I⋅ [u' v ' ]T = 0 (u’,v’) (u+u’,v+v’) edge The barber pole illusion http://en.wikipedia.org/wiki/Barberpole_illusion The barber pole illusion http://en.wikipedia.org/wiki/Barberpole_illusion The aperture problem Perceived motion The aperture problem Actual motion Solving the ambiguity… B. Lucas and T. Kanade. An iterative image registration technique with an application to stereo vision. In Proceedings of the International Joint Conference on Artificial Intelligence, pp. 674–679, 1981. • Spatial coherence constraint: solve for many pixels and assume they all have the same motion • In our case, if the object fits in a 5x5 pixel patch, this gives us 25 equations: Solving the ambiguity… • Least squares problem: Matching patches across images • Over-constrained linear system Least squares solution for d given by The summations are over all pixels in the K x K window Dealing with larger movements: Iterative refinement Original (x,y) position 1. Initialize (x’,y’) = (x,y) 2. Compute (u,v) by 2nd moment matrix for feature patch in first image It = I(x’, y’, t+1) - I(x, y, t) displacement 1. Shift window by (u, v): x’=x’+u; y’=y’+v; 2. Recalculate It 3. Repeat steps 2-4 until small change • Use interpolation to warp by subpixel values Schematic of Lucas-Kanade [Baker & Matthews, 2003] Dealing with larger movements • How to deal with cases where the initial guess is not within a few pixels of the solution? Dealing with larger movements: coarse-tofine registration run iterative L-K upsample run iterative L-K . . . image J1 Gaussian pyramid of image 1 (t) image I2 image Gaussian pyramid of image 2 (t+1) Coarse-to-fine optical flow estimation u=1.25 pixels u=2.5 pixels u=5 pixels image Himage 1 Gaussian pyramid of image 1 u=10 pixels image I2 image Gaussian pyramid of image 2 Summary • L-K works well when: – Have a good initial guess – L2 (SSD) is a good metric – Can handle more degrees of freedom in motion model (scale, rotation, affine, etc.), which are too expensive for search Two Problems • Outliers: bright strong features that are wrong • Complex, high dimensional, or non-rigid motion One Solution: feature tracking • Idea: track small, good features using translation only (u,v) instead of whole object – use outlier rejection to get consensus of only the points that agree to common solution Conditions for solvability Optimal (u, v) satisfies Lucas-Kanade equation When is this solvable? I.e., what are good points to track? • ATA should be invertible • ATA should not be too small due to noise – eigenvalues 1 and 2 of ATA should not be too small • ATA should be well-conditioned – 1/ 2 should not be too large ( 1 = larger eigenvalue) M = ATA is the second moment matrix ! (Harris corner detector…) • Eigenvectors and eigenvalues of ATA relate to edge direction and magnitude • The eigenvector associated with the larger eigenvalue points in the direction of fastest intensity change • The other eigenvector is orthogonal to it Low-texture region – gradients have small magnitude – small1, small 2 Edge – gradients very large or very small – large1, small 2 High-texture region – gradients are different, large magnitudes – large1, large 2 Feature Point tracking • Find a good point to track (harris corner) • Track small patches (5x5 to 31x31) (e.g. using Lucas-Kanade) • For rigid objects with affine motion: solve motion model parameters by robust estimation (RANSAC – to be covered later) • For motion segmentation, apply Markoff Random Field (MRF) algorithms (later?) [Kanade, Lucas,Tamasi] Implementation issues • Window size – Small window more sensitive to noise and may miss larger motions (without pyramid) – Large window more likely to cross an occlusion boundary (and it’s slower) – 15x15 to 31x31 seems typical • Weighting the window – Common to apply weights so that center matters more (e.g., with Gaussian) Dense Motion field • The motion field is the projection of the 3D scene motion into the image What would the motion field of a non-rotating ball moving towards the camera look like? Optical flow • Definition: optical flow is the apparent motion of brightness patterns in the image • Ideally, optical flow would be the same as the motion field • Have to be careful: apparent motion can be caused by lighting changes without any actual motion – Think of a uniform rotating sphere under fixed lighting vs. a stationary sphere under moving illumination Lucas-Kanade Optical Flow • Same as Lucas-Kanade feature tracking, but densely for each pixel – As we saw, works better for textured pixels • Operations can be done one frame at a time, rather than pixel by pixel – Efficient Example * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003 Multi-resolution registration * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003 Optical Flow Results * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003 Optical Flow Results * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003 Errors in Lucas-Kanade • The motion is large – Possible Fix: Keypoint matching • A point does not move like its neighbors – Possible Fix: Region-based matching • Brightness constancy does not hold – Possible Fix: Gradient constancy