Digital Communication Systems Lecture #5
advertisement

Digital Communication Systems
Lecture 5, Prof. Dr. Habibullah
Jamal
Under Graduate, Spring 2008
1
Chapter 4: Bandpass Modulation and Demodulation
Bandpass Modulation is the process by which some characteristics
of a sinusoidal waveform is varied according to the message signal.
Modulation shifts the spectrum of a baseband signal to some high
frequency.
Demodulator/Decoder baseband waveform recovery
2
4.1 Why Modulate?
Most channels require that the baseband signal be shifted to a higher
frequency
For example in case of a wireless channel antenna size is inversely
proportional to the center frequency, this is difficult to realize for baseband
signals.
For speech signal f = 3 kHz =c/f=(3x108)/(3x103)
Antenna size without modulation /4=105 /4 meters = 15 miles - practically
unrealizable
Same speech signal if amplitude modulated using fc=900MHz will require
an antenna size of about 8cm.
This is evident that efficient antenna of realistic physical size is needed for
radio communication system
Modulation also required if channel has to be shared by several
transmitters (Frequency division multiplexing).
3
4.2 Digital Bandpass Modulation Techniques
Three ways of representing bandpass signal:
(1) Magnitude and Phase (M & P)
Any bandpass signal can be represented as:
s ( t ) A ( t ) cos[ t A ( t ) cos[ 0 t ( t )]
A(t) ≥ 0 is real valued signal representing the magnitude
Θ(t) is the genarlized angle
φ(t) is the phase
The representation is easy to interpret physically, but often is not
mathematically convenient
In this form, the modulated signal can represent information through
changing three parameters of the signal namely:
Amplitude A(t)
: as in Amplitude Shift Keying (ASK)
Phase φ(t)
: as in Phase Shift Keying (PSK)
Frequency dΘ(t)/ dt : as in Frequency Shift Keying (FSK)
4
Angle Modulation
Consider a signal with constant frequency:
s ( t ) A ( t ) cos( ( t )) A ( t ) cos( 0 t )
Its instantaneous frequency can be written as:
i (t )
d (t )
dt
0
or
(t )
t
i ( )d
5
Phase Shift Keying (PSK) or PM
Consider a message signal m(t), we can write the phase modulated
signal as
(t ) c t K p m (t )
s PM ( t ) A cos[ c t K p m ( t )]
i (t )
d
dt
c K p m ( t )
6
Frequency Shift Keying (FSK) or FM
In case of Frequency Modulation
i (t ) 0 K f m (t )
(t )
t
[ 0 K f m ( t )] d
0t K
f
t
m ( )d
s F M ( t ) A co s[ 0 t K
f
t
m ( )d ]
A co s[ 0 t K f a ( t )]
where:
a (t )
t
m ( )d
7
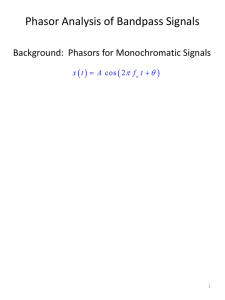
Example
The message signal
1
0.5
0
-0.5
-1
0
0.05
0.1
0.15
0.1
0.15
The modulated signal
1
0.5
0
-0.5
-1
0
0.05
Time
8
4.2.1 Phasor Representation of Sinusoid
Consider the trigonometric identity called the Euler’s theorem:
e
j 0 t
cos( 0 t ) j sin( 0 t )
Using this identity we can have the phasor representation of the sinusoids.
Figure 4.2 below shows such relation:
11
Phasor Representation of Amplitude Modulation
Consider the AM signal in phasor form:
j 0 t
s (t ) R e e
j t
j m t
e m
e
1
2
2
12
Phasor Representation of FM
Consider the FM signal in phasor form:
j 0 t
s (t ) R e e
j t
j m t j m t e m
e
e
1
2
2
2
13
Digital Modulation Schemes
Basic Digital Modulation Schemes:
Amplitude Shift Keying (ASK)
Frequency Shift Keying (FSK)
Phase Shift Keying (PSK)
Amplitude Phase Keying (APK)
For Binary signals (M = 2), we have
Binary Amplitude Shift Keying (BASK)
Binary Phase Shift Keying (BPSK)
Binary Frequency Shift Keying (BFSK)
For M > 2, many variations of the above techniques exit usually
classified as M-ary Modulation/detection
18
Figure4.5: digital modulations, (a) PSK (b) FSK (c) ASK (d) ASK/PSK (APK)
20
Amplitude Shift Keying
Modulation Process
In Amplitude Shift Keying (ASK),
the amplitude of the carrier is
switched between two (or more)
levels according to the digital data
For BASK (also called ON-OFF
Keying (OOK)), one and zero are
represented by two amplitude
levels A1 and A0
21
Analytical Expression:
Ai cos( c t ),
s (t )
0,
0 t T binary 1
0 t T binary 0
where Ai = peak amplitude
s ( t ) A cos( 0 t )
2 Arms cos( 0 t )
2 P cos( 0 t )
2E
T
2 A rms cos( 0 t )
2
cos( 0 t ) P
V
2
R
Hence,
2 E i (t )
cos( i t ),
si (t )
T
0,
0 t T binary 1
, i 0 , 2 ,...... M 1
0 t T binary 0
where
E
T
0
s i ( t )dt , i 0 , 2 ,...... M 1
2
22
Where for binary ASK (also known as ON OFF Keying (OOK))
s1 ( t ) Ac m ( t ) cos( c t ), 0 t T binary 1
s 0 (t ) 0,
0 t T binary 0
Mathematical ASK Signal Representation
The complex envelope of an ASK signal is:
g ( t ) Ac m ( t )
The magnitude and phase of an ASK signal are:
A ( t ) Ac m ( t ),
(t ) 0
The in-phase and quadrature components are:
x ( t ) Ac m ( t )
y (t ) 0 ,
the quadrature component is wasted.
23
•
It can be seen that the
bandwidth of ASK
modulated is twice that
occupied by the source
baseband stream
Bandwidth of ASK
Bandwidth of ASK can be found from its power spectral density
The bandwidth of an ASK signal is twice that of the unipolar NRZ
line code used to create it., i.e.,
B 2 Rb
2
Tb
This is the null-to-null bandwidth of ASK
24
If raised cosine rolloff pulse shaping is used, then the bandwidth is:
1
B (1 r ) R b W
(1 r ) R b
2 a baseband unipolar NRZ
Spectral efficiency of ASK is half that of
line code
This is because the quadrature component is wasted
95% energy bandwidth
B
3
Tb
3 Rb
25
Detectors for ASK
Coherent Receiver
Coherent detection requires the phase information
A coherent detector mixes the incoming signal with a locally generated
carrier reference
Multiplying the received signal r(t) by the receiver local oscillator (say
Accos(wct)) yields a signal with a baseband component plus a
component at 2fc
Passing this signal through a low pass filter eliminates the high
frequency component
In practice an integrator is used as the LPF
26
The output of the LPF is sampled once per bit period
This sample z(T) is applied to a decision rule
z(T) is called the decision statistic
Matched filter receiver of OOK signal
A MF pair such as the root raised
cosine filter can thus be used to shape
the source and received baseband
symbols
In fact this is a very common approach
in signal detection in most bandpass
data modems
27
Noncoherent Receiver
Does not require a phase reference at the receiver
If we do not know the phase and frequency of the carrier, we can
use a noncoherent receiver to recover ASK signal
Envelope Detector:
The simplest implementation of an envelope detector comprises
a diode rectifier and smoothing filter
28
Frequency Shift Keying (FSK)
In FSK, the instantaneous carrier frequency is switched between 2 or
more levels according to the baseband digital data
data bits select a carrier at one of two frequencies
the data is encoded in the frequency
Until recently, FSK has been the most widely used form of digital
modulation;Why?
Simple both to generate and detect
Insensitive to amplitude fluctuations in the channel
FSK conveys the data using distinct carrier frequencies to represent
symbol states
An important property of FSK is that the amplitude of the modulated
wave is constant
Waveform
29
Analytical Expression
si (t )
2Es
Ts
cos( i t ),
i 0 ,1,.... M 1
i ( t ) [ 0 t d
t
fi
d
dt
m ( ) d ]
i (t ) f 0 f d m (t )
Analog
form
General expression is
si (t )
Where
2Es
Ts
cos( 2 f 0 t 2 i ft ),
i 0 ,1,.... M 1
f f i f i 1
f i f 0 i f
and
E s kE b , T s kT b
30
Binary FSK
In BFSK, 2 different frequencies, f1 and f2 = f1 + ∆ f are used to
transmit binary information
Data is encoded in the frequencies
That is, m(t) is used to select between 2 frequencies:
f1 is the mark frequency, and f2 is the space frequency
s 0 (t )
2Es
s1 ( t )
2Es
Tb
Tb
cos 2 ( f 1 1 ),
cos 2 ( f 2 2 ),
0 t Tb
0 t Tb
31
A c cos( 1t 1 ),
s (t )
A c cos( 2 t 2 ),
when m ( t ) 1 or X n 1
when m ( t ) 1 or X n 0
Binary Orthogonal Phase FSK
When w0 an w1 are chosen so that f1(t) and f2(t) are orthogonal, i.e.,
1 ( t ) 2 ( t ) 0
form a set of K = 2 basis orthonormal basis
functions
32
Phase Shift Keying (PSK)
General expression is
si (t )
2Es
Ts
cos[ 2 f 0 t i ( t )],
i 0 ,1,.... M 1
Where
i (t )
2 i
i 0 ,1,.... M 1
M
33
3. Coherent Detection of Binary FSK
Coherent detection of Binary FSK is similar to that for
ASK but in this case there are 2 detectors tuned to the 2
carrier frequencies
Recovery of fc in receiver is made simple if the
frequency spacing between symbols is made equal to
the symbol rate.
34
Non-coherent Detection
One of the simplest ways of detecting binary FSK is to pass the
signal through 2 BPF tuned to the 2 signaling freqs and detect
which has the larger output averaged over a symbol period
35
Phase Shift Keying (PSK)
In PSK, the phase of the carrier signal is switched between 2 (for
BPSK) or more (for MPSK) in response to the baseband digital data
With PSK the information is contained in the instantaneous phase of
the modulated carrier
Usually this phase is imposed and measured with respect to a fixed
carrier of known phase – Coherent PSK
For binary PSK, phase states of 0o and 180o are used
Waveform:
36
Analytical expression can be written as
s i ( t ) A g ( t ) cos[ c t i ( t )],
0 t Tb , i 1, 2, ...., M
where
g(t) is signal pulse shape
A = amplitude of the signal
ø = carrier phase
The range of the carrier phase can be determined using
i (t )
2 ( i 1)
i 1,.... M
M
For a rectangular pulse, we obtain
g (t )
2
Tb
, 0 t T b ; and assume A
Eb
37
We can now write the analytical expression as
si (t )
2 Eb
Tb
2 ( i 1)
cos c t
, 0 t T b , and i 1, 2 ,.... M
M
Constant envelope
carrier phase changes
abruptly at the beginning of
each signal interval
In PSK the carrier phase changes abruptly at the beginning of each
signal interval while the amplitude remains constant
38
We can also write a PSK signal as:
si (t )
2E
T
2 ( i 1)
cos c t
M
2E
2 ( i 1)
2 ( i 1)
cos
cos
t
sin
sin
cos
t
c
c
T
M
M
Furthermore, s1(t) may be represented as a linear combination of
two orthogonal functions ψ1(t) and ψ2(t) as follows
si (t )
E cos
2 ( i 1)
M
1 (t )
E sin
2 ( i 1)
M
2 (t )
Where
1 (t )
2
T
cos[ c t ] and 2 ( t )
2
T
sin[ c t ]
39
Using the concept of the orthogonal basis function, we can represent
PSK signals as a two dimensional vector
si (t )
E b cos
2 ( i 1)
M
1,
E b sin
2 ( i 1)
M
2
For M-ary phase modulation M = 2k, where k is the number of
information bits per transmitted symbol
In an M-ary system, one of M ≥ 2 possible symbols, s1(t), …, sm(t), is
transmitted during each Ts-second signaling interval
The mapping or assignment of k information bits into M = 2k possible
phases may be performed in many ways, e.g. for M = 4
40
A preferred assignment is to use “Gray code” in which adjacent
phases differ by only one binary digit such that only a single bit error
occurs in a k-bit sequence. Will talk about this in detail in the next few
slides.
It is also possible to transmit data encoded as the phase change
(phase difference) between consecutive symbols
This technique is known as Differential PSK (DPSK)
There is no non-coherent detection equivalent for PSK except for
DPSK
41
M-ary PSK
In MPSK, the phase of the carrier takes on one of M possible values
2 ( i 1)
i (t )
, i 1, 2 ,....., M
M
Thus, MPSK waveform is expressed as
si (t )
M 2
2 ( i 1)
cos 0 t
T
M
2E
2 ( i 1)
s i ( t ) g ( t ) cos 0 t
M
k
MPSK
2
BPSK
4
QPSK
8
8 PSK
16 PSK
16
.......... .
Each si(t) may be expanded in terms of two basis function Ψ1(t) and
Ψ2(t) defined as
1 (t )
2
Ts
cos c t ,
2 (t )
2
Ts
sin c t ,
42
Quadrature PSK (QPSK)
Two BPSK in phase quadrature
QPSK (or 4PSK) is a modulation technique that transmits 2-bit of
information using 4 states of phases
For example
2-bit Information
ø
00
0
01
π/2
10
π
11
3π/2
Each symbol corresponds
to two bits
General expression:
s QPSK ( t )
2Es
Ts
2 ( i 1)
cos 2 f c t
,
M
i 1, 2 , 3 , 4
0 t Ts
43
The signals are:
s0
2Es
cos( c t )
Ts
s2
2Es
s3
2Es
Ts
Ts
cos( c t )
cos( c t
s 0 , 2 (t )
2Es
s1 , 3 ( t )
2Es
Ts
Ts
3
)
2
cos c t ,
sin c t ,
s1
2Es
2Es
cos( c t )
Ts
2Es
Ts
Ts
cos( c t
2Es
)
2
Ts
sin( c t )
sin( c t )
shift o f 0 and 180
0
shift o f 90
0
and 270
0
0
44
We can also have:
s QPSK ( t )
2Es
Ts
2 ( i 1)
cos c t
,
M
4
i 1, 2 , 3 , 4
0 t Ts
45
One of 4 possible waveforms is transmitted during each signaling
interval Ts
i.e., 2 bits are transmitted per modulation symbol → Ts=2Tb)
In QPSK, both the in-phase and quadrature components are used
The I and Q channels are aligned and phase transition occur once
every Ts = 2Tb seconds with a maximum transition of 180 degrees
From
s QPSK ( t )
2Es
Ts
2 ( i 1)
cos 2 f c t
M
As shown earlier we can use trigonometric identities to show that
s QPSK ( t )
2Es
Ts
2 ( i 1)
cos
cos( c t )
M
2Es
Ts
2 ( i 1)
sin
sin( c t )
M
46
In terms of basis functions
1 (t )
2
Ts
cos 2 f c t
and
2 (t )
2
Ts
sin 2 f c t
we can write sQPSK(t) as
s QPSK ( t )
2 ( i 1)
E s cos
1 (t )
M
2 ( i 1)
E s sin
(
t
)
2
M
With this expression, the constellation diagram can easily be drawn
For example:
47
Coherent Detection
1. Coherent Detection of PSK
Coherent detection requires the phase information
A coherent detector operates by mixing the incoming data signal
with a locally generated carrier reference and selecting the
difference component from the mixer output
Multiplying r(t) by the receiver LO (say A cos(ωct)) yields a signal
with a baseband component plus a component at 2fc
The LPF eliminates the high frequency component
The output of the LPF is sampled once per bit period
The sampled value z(T) is applied to a decision rule
z(T) is called the decision statistic
48
Matched filter receiver
A MF pair such as the root raised cosine filter can thus be used to
shape the source and received baseband symbols
In fact this is a very common approach in signal detection in most
bandpass data modems
49
2. Coherent Detection of MPSK
QPSK receiver is composed of 2 BPSK receivers
one that locks on to the sine carrier and
the other that locks onto the cosine carrier
1 ( t ) A cos 0 t
2 ( t ) A sin 0 t
z 0 (t )
z1 ( t )
Ts
0
Ts
0
s 0 ( t ) 1 ( t ) dt
s 0 ( t ) 2 ( t ) d t
Ts
0
2
( A cos 0 t ) ( A cos 0 t ) dt
Ts
0
A Ts
2
L0
( A c o s 0 t ) ( A sin 0 t ) d t 0
50
Output
S0(t)
S1(t)
S2(t)
S3(t)
Z0
Lo
0
-Lo
0
Z1
0
-Lo
0
Lo
2
L0
A Ts
2
cos
4
o
o
If 1 ( t ) A cos( 0 t 45 ) and 2 ( t ) A cos( 0 t 45 )
Output
S0(t)
S1(t)
S2(t)
S3(t)
Z0
Lo
-Lo
-Lo
Lo
Z1
Lo
Lo
-Lo
-Lo
Decision:
1. Calculate zi(t) as
z i (t )
T
0
r ( t ) i ( t ) dt
2. Find the quadrant of (Z0, Z1)
51
A coherent QPSK receiver requires accurate carrier recovery using
a 4th power process, to restore the 90o phase states to modulo 2π
52
4.3 Detection of Signals in Gaussian Noise
Detection models at baseband and passband are identical
Equivalence theorem (for linear systems):
Linear signal processing on passband signal and eventual
heterodyning to baseband is equivalent to first heterodyning
passband signal to baseband followed by linear signal processing
Where
Heterodyning = Process resulting in spectral shift in signal e.g.
mixing
Performance Analysis and description of communication systems
is usually done at baseband for simplicity
53
4.3.2 Correlation Receiver
reference signal
s1 (t )
Decision Stage
T
0
r ( t ) s 1 ( t ) dt
0
......
......
r (t ) si (t ) n(t )
z 1 (T )
T
comparator selects
si(t)
with max zi(t)
sM (t )
T
z M (T )
T
0
sˆi (t )
r ( t ) s M ( t ) dt
0
reference signal
1 (t )
Decision Stage
T
0
T
r ( t ) 1 ( t ) dt
0
......
......
r (t ) si (t ) n(t )
z 1 (T )
comparator selects
si(t)
with max zi(t)
M (t )
T
z M (T )
T
0
r (t )
M
sˆi (t )
( t ) dt
0
54
4.4 Coherent Detection
4.4.1 Coherent Detection of PSK
Consider the following binary PSK example
2E
s1 ( t )
cos( 0 t ) 0 t T
T
s 2 (t )
2E
T
cos( 0 t )
2E
T
cos( 0 t )
n(t) = zero-mean Gaussian random process
Where φ : phase term is an arbitrary constant
E: signal energy per symbol
T: Symbol duration
Single basis function for this antipodal case:
1 (t )
2
T
cos 0 t
for
0 t T
55
Transmitted signals si(t) in terms of ψ1(t) and coefficients ai1(t) are
s i ( t ) a i1 ( t ) 1 ( t )
s1 ( t ) a11 ( t ) 1 ( t )
E 1 (t )
s 2 ( t ) a 21 ( t ) 1 ( t )
E 1 (t )
Assume that s1 was transmitted, then values of product integrators
with reference to ψ1 are
| s E
E z 1 | s1 E
E z 2
E
0
T
1
T
0
E
2
1
2
1
( t ) dt
( t ) n ( t ) 1 ( t ) dt
( t ) n ( t )
1
56
T 2
E z 1 | s 1 E
0
T
T
2
E z 2 | s 1 E
0
T
E cos
E cos
2
2
0 t n (t )
0 t n (t )
cos 0 t dt
E
T
2
cos 0 t dt E
T
2
where E{n(t)}=0
Decision stage determines the the location of the transmitted signal
within the signal space
For antipodal case choice of ψ1(t) = √2/T cosw0t normalizes E{zi(T)}
to ±√E
Prototype signals si(t) are the same as reference signals ψj(t) except
for normalizing scale factor
Decision stage chooses signal with largest value of zi(T)
57
4.4.2 Sampled Matched Filter
The impulse response h(t) of a filter matched to s(t) is:
s (T t )
h (t )
0
0t T
elsewhere
Let the received signal r(t) comprise a prototype signal si(t) plus
noise n(t)
Bandwidth of the signal is W =1/2T where T is symbol time then
Fs= 2W = 1/T
Sample at t =kTs . This allows us to use discrete notation:
r ( k ) si ( k ) n ( k )
(eq 4.26)
i 1, 2 k 0 ,1,...
Let ci(n) be the coefficients of the MF where n is the time index and
N represents the samples per symbol
c i ( n ) s i [( N 1) n ]
(eq 4.27)
58
Discrete form of convolution integral suggests
N 1
zi (k )
r ( k n ) ci ( n )
K 0 ,1,....., modulo
(eq 4.28)
N
n0
Since noise is assumed to have zero mean, so the expected value
of a received sample is:
E r ( k ) s i ( k )
i 1, 2
Therefore, if si(t) is transmitted, the expected MF output is:
E z i ( k )
N 1
si ( k n ) ci ( n )
K 0 ,1,....., modulo
n0
N
(eq 4.29)
Combining eq (4.27) and (eq 4.29) to express the correlator outputs
at time k = N –1 = 3:
3
z1 ( k 3)
s (3 n ) c ( n ) 2
1
n0
1
(eq 4.30a)
3
z 2 ( k 3)
s (3 n ) c
1
n0
2
(n) 2
(eq 4.30b)
59
Sampled
Matched
Filter
Fig 4.10
60
4.4.3 Coherent Detection of MPSK
The signal space for a multiple phase-shift keying (MPSK) signal set
is illustrated for a four-level (4-ary) PSK or quadriphase shift
keying(QPSK)
Fig 4.11
61
At the transmitter, binary digits are collected two at a time for each
symbol interval
Two sequential digits instruct the modulator as to which of the four
waveforms to produce
si(t) can be expressed as:
si (t )
2E
cos( 0 t
2 i
0 t T
)
i 1,... M
T
M
where:
E: received energy of waveform over each symbol duration T
w0: carrier frequency
Assuming an ortho-normal signal space, the basis functions are:
1 (t )
2
T
cos 0 t
2 (t )
2
T
sin 0 t
62
si(t) can be written in terms of these orthonormal coordinates:
0 t T
s i ( t ) a i 1 1 ( t ) a i 2 2 ( t )
i 1,... M
2 i
2 i
E cos
(
t
)
E
sin
1
2 ( t )
M
M
The decision rule for the detector is:
Decide that s1(t) was transmitted if received signal vector fall in
region 1
Decide that s2(t) was transmitted if received signal vector fall in
region 2 etc
i.e choose ith waveform if zi(T) is the largest of the correlator
outputs
The received signal r(t) can be expressed as:
r (t )
2E
T
cos i cos 0 t sin i sin 0 t n ( t )
0tT
i 1,... M
63
The upper corelator computes
X
T
T
0
The lower corelator computes
Y
0
r ( t ) 1 ( t ) dt
r ( t ) 2 ( t ) dt
64
The computation of the received
phase angle φ can be
accomplished by computing the
arctan of Y/X
Where:
X: is the inphase component of the
received signal
Y: is the quadrature component of
the received signal
ǿ: is the noisy estimate of the
transmitted φi
The demodulator selects the φi
that is closest to the angle ǿ
Fig 4.13
Or it computes | φi - ǿ | for each φi
prototypes and chooses φi yielding
smallest output
65
4.4.4 Coherent Detection of FSK
FSK modulation is characterized by the information in the frequency
of the carrier
Typical set of FSK signal waveform:
0 t T
2E
si (t )
cos( i t )
i 1,... M
T
Where Φ: is an arbitrary constant
E: is the energy content of si(t) over each symbol duration T
(wi+1- wi): is typically assumed to be an integral multiple of λ/T
Assuming the basis functions form an orthonormal set:
j (t )
2
T
cos j t
j 1,...., N
Amplitude √2/T normalizes the expected output of the MF
a ij
T
0
2E
T
cos( i t )
2
T
cos( j t ) dt
66
Therefore
a ij
E
0
for i j
otherwise
This implies, the ith prototype signal vector is located on the ith
coordinate axis at a displacement √E from the origin of the symbol
space
For general M-ary case and given E, the distance between any two
prototype signal vectors si and sj is constant:
d ( s i , s j ) || s i s j ||
2E
for i j
67
Signal space partitioning for 3-ary FSK
68