Oscar`s Update Presentation 1
advertisement

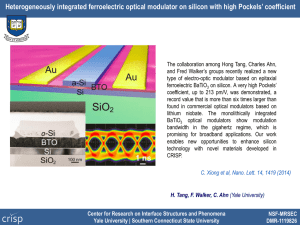
Update Presentation 1 Weeks 1-4 Optic Flow QuadCopter Control Oscar Merry Contents • • • • • • • • • Introduction OpenCV Honeybee Vision Research Paper 1 – AR Drone LabVIEW Toolkit Research Paper 2 – Optical Flow Quadrotor controller Other Research Papers General Problems Aims of Project Discussion Introduction • Optical Flow: – The estimation of the motion field created by a moving camera with respect to a rigid scene. • Last 4 weeks: – – – – Literature Analysis Research into Optic Flow Research into honeybee navigation Research into OpenCV OpenCV • Open-source C / C++ library for advanced computer vision. • Built in functions for many optical flow processing techniques: – Canny edge detector – Feature tracking – Lucas–Kanade – Horn-Schunck – Shi-Tomasi Honeybee Vision • Each compound eye in the honeybee contains ~ 5000 ommatidia • Each ommatidium has 9 photoreceptor cells grouped into 3 classes – Ultraviolet sensitive – Blue sensitive – Green sensitive • Bees control their flight speed by keeping optical flow constant. (The same process is used for landing) This is done via the Green photoreceptors. • Bees recognise objects both through strong contrasts in luminance or colour and through optical flow. Research Paper 1 - AR Drone LabVIEW Toolkit • Michael Mogenson Masters Thesis: – “A software framework for the control of low-cost quadrotor aerial robots.” • Created a LabVIEW toolkit for the control of Parrot AR Drone. AR Drone LabVIEW Toolkit • Toolkit has multiple virtual instruments. (VIs) – Regular Comms VIs: • Main VI for control commands and comms management • Video VI for video reading and decoding • Nav Data VI for reading navigation data – ‘Thinking’ Vis: • State VI to estimate position in X,Y,Z Cartesian coordinates • Various image processing Vis (Fast blob detection, dense optical flow, image space conversion, ROI VI) • Toolkit has wrapper for OpenCV Library. AR Drone LabVIEW Toolkit – State VI • Populates a rotation matrix between the drones coordinate system and the ground using Euler orientation angles from navigation data. • Applies rotation matrix to the velocities measured from optical flow from the bottom camera. • Rotated velocities integrated into a position with the timestamp data. • Suffers from problem of drift. AR Drone LabVIEW Toolkit – Achievements • Benefit of LabVIEW – modifications without recompiling • Demonstrations: – Face tracking – Indoor hallway navigation (Via vanishing point) – Fly through hoop • Problems: • Indoor hallway navigation fails if 90 degree turn or if facing wall • State Estimation VI suffers from drift Research Paper 1 - Optical Flow Quadrotor controller • “Optical Flow-Based Controller for Reactive and Relative Navigation dedicated to a Four Rotor Rotorcraft” • Eduardo Rondon, Isabelle Fantoni-Coichot, Anand Sanchez, Guillaume Sanahuja • Produced a controller for a Quadrotor based on the optical flow from 2 cameras. (1 for velocity regulation, 1 for obstacle avoidance) • Implemented obstacle avoidance for indoor navigation. Optical Flow Quadrotor controller Optical Flow Quadrotor controller Achievements • Velocity regulation via optical flow controller. • Sets the inverse time-to-contact to a threshold to stop the vehicle if obstacle detected. • Has lateral and altitude avoidance. Other Research Papers • “Optic flow based slope estimation for autonomous landing” de Croon et al. – Achieved slope following and autonomous landing. • “Combined Optic-Flow and Stereo-Based Navigation of Urban Canyons for a UAV” Hrabar et al. – Used optical flow to balance UAV in canyon. – Used stero vision to navigate T and L junctions. • “An adaptive vision-based autopilot for mini flying machines guidance, navigation and control.” – used optic flow and IMU data for guidance navigation and control, specifically automatic hovering, landing, and target tracking. – Use feature tracking to reduce optic flow computation. General Problems • Camera Calibration – In order for the depth of a scene to be known the camera must be calibrated on a known object. (Or height above ground must be known) • Video Delay – Video encoding, decoding, and transmission must be fast enough. Project Aims • Hovering Stabilisation • Position and velocity control • Smooth Landing Execution • Obstacle recognition and avoidance (with a focus on methods that have similarities to honeybees e.g. flower recognition) Discussion • Communication: – Hardware – State commands (roll angle, pitch angle, yaw rate, climb rate, ??) – Video frames • Formalize state commands.