Topic12.Presentation.ICAM
advertisement

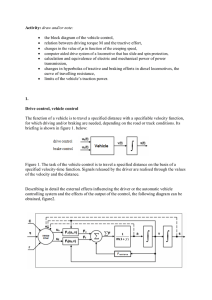
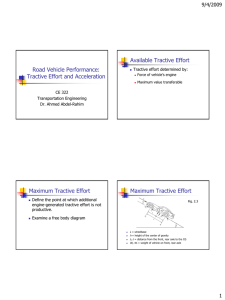
NAZARIN B. NORDIN nazarin@icam.edu.my What you will learn: • Tractive effort, tractive resistance, braking efficiency • Tractive resistance components: rolling/ gradient/ air resistance • Energy dissipated/ power required at constant velocity on level plane, accelerating/ braking forces applied on level plane, braking efficiency Vehicle Dynamics CEE 320 Steve Muench Outline 1. Resistance a. Aerodynamic b. Rolling c. Grade 2. 3. 4. 5. Tractive Effort Acceleration Braking Force Stopping Sight Distance (SSD) Main Concepts • • • • • Resistance Tractive effort Vehicle acceleration Braking Stopping distance F ma Ra Rrl Rg Resistance Resistance is defined as the force impeding vehicle motion What is this force? 1. Aerodynamic resistance 2. Rolling resistance 3. Grade resistance F ma Ra Rrl Rg Aerodynamic Resistance Ra Composed of: 1. Turbulent air flow around vehicle body (85%) 2. Friction of air over vehicle body (12%) 3. Vehicle component resistance, from radiators and air vents (3%) Ra PRa from National Research Council Canada 2 2 CD Af V 2 CD Af V 1 hp 550 ft lb sec 3 Rolling Resistance Rrl Composed primarily of 1. Resistance from tire deformation (90%) 2. Tire penetration and surface compression ( 4%) 3. Tire slippage and air circulation around wheel ( 6%) 4. Wide range of factors affect total rolling resistance 5. Simplifying approximation: Rrl f rlW PR rl f rlWV 1 hp 550 ft lb sec V f rl 0.011 147 Grade Resistance Rg Composed of – Gravitational force acting on the vehicle Rg W sin g For small angles, sin g tan g Rg W tan g tan g G Rg WG θg Rg θg W Available Tractive Effort The minimum of: 1. Force generated by the engine, Fe 2. Maximum value that is a function of the vehicle’s weight distribution and road-tire interaction, Fmax Availabletractiveeffort minFe , Fmax Tractive Effort Relationships Engine-Generated Tractive Effort • Force M e 0 d Fe r • Power Fe = Engine generated tractive effort reaching wheels (lb) Me = Engine torque (ft-lb) ε0 = Gear reduction ratio ηd = Driveline efficiency r = Wheel radius (ft) ft lb torqueft lb engine rpm hp 550 2 sec 550 sec 60 min Vehicle Speed vs. Engine Speed V 2rne 1 i 0 V = velocity (ft/s) r = wheel radius (ft) ne = crankshaft rps i = driveline slippage ε0 = gear reduction ratio Typical Torque-Power Curves Maximum Tractive Effort • Front Wheel Drive Vehicle • Rear Wheel Drive Vehicle • What about 4WD? Fmax Fmax lr f rl h W L h 1 L l W f f rl h L h 1 L Diagram θg Vehicle Acceleration • Governing Equation F R mma • Mass Factor (accounts for inertia of vehicle’s rotating parts) m 1.04 0.0025 02 Example A 1989 Ford 5.0L Mustang Convertible starts on a flat grade from a dead stop as fast as possible. What’s the maximum acceleration it can achieve before spinning its wheels? μ = 0.40 (wet, bad pavement) 1989 Ford 5.0L Mustang Convertible Torque 300 @ 3200 rpm Curb Weight 3640 Weight Distribution Front 57% Rear 43% Wheelbase 100.5 in Tire Size P225/60R15 Gear Reduction Ratio 3.8 Driveline efficiency 90% Center of Gravity 20 inches high Braking Force • Front axle Fbf • Rear axle max Fbr max W lr h f rl L W l f h f rl L Braking Force • Ratio • Efficiency l r h f rl front BFR l f h f rl rear b g max Braking Distance V • Theoretical – ignoring air resistance • Practical b V S 2 g b f rl sin g 2 1 V12 V22 d a 2 g G g d p V1t p • Perception ds d d p 2 2 For grade = 0 V12 V22 d 2a Stopping Sight Distance (SSD) • Worst-case conditions – Poor driver skills – Low braking efficiency – Wet pavement • Perception-reaction time = 2.5 seconds • Equation 2 V1 SSD V1tr a 2 g G g Stopping Sight Distance (SSD) from ASSHTO A Policy on Geometric Design of Highways and Streets, 2001 Note: this table assumes level grade (G = 0) SSD – Quick and Dirty 1. Acceleration due to gravity, g = 32.2 ft/sec2 2. There are 1.47 ft/sec per mph 3. Assume G = 0 (flat grade) V12 V22 1.47V12 0 1.472 1 V2 V2 2 d V 1.075 1.075 2 g a g G 2 32.211.2 32.2 0 2 11.2 11.2 a d p 1.47V1 t p 1.47Vt p V2 d s 1.075 1.47Vt p a V = V1 in mph a = deceleration, 11.2 ft/s2 in US customary units tp = Conservative perception / reaction time = 2.5 seconds Primary References • Mannering, F.L.; Kilareski, W.P. and Washburn, S.S. (2005). Principles of Highway Engineering and Traffic Analysis, Third Edition). Chapter 2 • American Association of State Highway and Transportation Officals (AASHTO). (2001). A Policy on Geometric Design of Highways and Streets, Fourth Edition. Washington, D.C.