Lecture 06 Powerpoint
advertisement

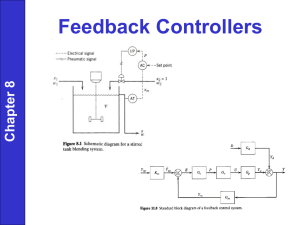
Lecture 6
Modeling in Digital Form
PID Controllers
Proportional
Controller
Proportional
Controller
Proportional
Controller
Integral
Controller
Derivative
Controller
PID Controllers
Proportional
Controller
E(s)
Integral
Controller
Derivative
Controller
P(s) = E(s) *[Kc + 1/TI s + TDs]
or
P(s) = E(s) *[Kc (1 + 1/TI's + TD's)]
or
P(s) = E(s) * Kc (TI'TD's2 + TI's +1)
TI's
There are some textbooks that consider placing these three modes in series:
Putting PI controller in series will give Integral control with a gain of
Kc/TI
Putting PD controller in series will give Derivative control with a gain of KcTD
Putting ID controller in series will give Proportional control with a gain of TD/TI
Putting PID controller in series will give Proportional control with a gain of KcTD/TI
PID Controllers – Series Configuration
Proportional
Controller
Proportional
Controller
E(s)
P(s)
Integral
Controller
Derivative
Controller
Putting PI and PD in series results in essentially the same control equation as PID
- only the b term in the quadratic is different { TI' >>>> (TI' + TD')/ TI' }
P, PI, and PID Controllers
Analog Equations
Proportional
Integral
Derivative
Analog vs. Digital
• Previous equations for controllers are analog
• The initial value p0 is needed to use these
equations in a continuous process unless
deviation variables are used
• Digital form is required for use on a computer
• Digital form use with deviation variables is
important so that you understand the need
for deviation variables in each control mode
Proportional-Integral-Derivative Control
• This subtle change in form allows the equation
to be used for real-time digital application in a
computer subroutine tied to a process, a final
control element, and a measurement block.
• Take care to account for the change in error,
since by including only the current error value,
you will be implementing Integral control when
you may intend to use Proportional control.
Proportional Control
Analog form:
p(t) = Kcε(t) + p0
The initial value cannot be established, so we
must consider the differences between the
current and previous input and output values:
change in output = Kc * change in error
p(t) – p(t-1) = Kc*[ε(t) – ε(t-1)]
P Control – comparison of step change
Assume Kc = 25 and p0 = 325
Introduce a step change ε(t) = A where A = 1.0
t
t-1
ε(t)
ε(t-1)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
325
325
0
-1
1
0
350
350
1
0
1
1
350
350
2
1
1
1
350
350
3
2
1
1
350
350
4
3
1
1
350
350
5
4
1
1
350
350
P Control – comparison of a ramp change
Assume Kc = 25 and p0 = 325
Introduce a ramp change ε(t) = A*t where A = 1.0
t
t-1
ε(t)
ε(t-1)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
325
325
0
-1
0
0
325
325
1
0
1
0
350
350
2
1
2
1
375
375
3
2
3
2
400
400
4
3
4
3
425
425
5
4
5
4
450
450
P Control – graphical comparison
Assume Kc = 25 and p0 = 325
and A = 1.0
Integral Control
Analog form:
The initial value cannot be established, so we
must establish the area numerically:
change in output = [1 /TI]* ε-t curve area change
p(t) – p(t-1) = [1 /TI]*[ε(t) + ε(t-1)]*Δt/2
I Control – comparison of step change
Assume TI = 0.04, p0 = 325 and Δt = 1
Introduce a step change ε(t) = A where A = 1.0
t
t-1
ε(t)
ε(t-1)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
325
325
0
-1
1
0
325
337.5
1
0
1
1
350
362.5
2
1
1
1
375
387.5
3
2
1
1
400
412.5
4
3
1
1
425
437.5
5
4
1
1
450
462.5
I Control – comparison of a ramp change
Assume TI = 0.04, p0 = 325 and Δt = 1
Introduce a ramp change ε(t) = A*t where A = 1.0
t
t-1
ε(t)
ε(t-1)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
325
325
0
-1
0
0
325
325
1
0
1
0
350
350
2
1
2
1
425
425
3
2
3
2
550
550
4
3
4
3
725
725
5
4
5
4
950
950
I Control – graphical comparison
Assume TI = 0.04, p0 = 325, and Δt = 1
and A = 1.0
Derivative Control
Analog form:
The initial value cannot be established, so we must
consider establishing the area numerically:
change in output = TD * ε-t curve slope change
p(t) – p(t-1) = TD*[(ε(t) – ε(t-1)) – (ε(t-1) – ε(t-2))]/Δt
p(t) – p(t-1) = TD*[ε(t) – 2*ε(t-1) + ε(t-2)]/Δt
D Control – comparison of step change
Assume TD = 25, p0 = 325 and Δt = 1
Introduce a step change ε(t) = A where A = 1.0
t
t-1
ε(t)
ε(t-1)
ε(t-2)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
0
325
325
0
-1
1
0
0
350
∞
1
0
1
1
0
325
325
2
1
1
1
1
325
325
3
2
1
1
1
325
325
4
3
1
1
1
325
325
5
4
1
1
1
325
325
D Control – comparison of a ramp change
Assume TD = 25, p0 = 325 and Δt = 1
Introduce a ramp change ε(t) = A*t where A = 1.0
t
t-1
ε(t)
ε(t-1)
ε(t-2)
p(t)
(analog)
p(t)
(digital)
-1
-2
0
0
0
325
325
0
-1
0
0
0
350
325
1
0
1
0
0
350
350
2
1
2
1
0
350
350
3
2
3
2
1
350
350
4
3
4
3
2
350
350
5
4
5
4
3
350
350
D Control – graphical comparison
Assume TD = 25, p0 = 325, and Δt = 1
and A = 1
D Control – graphical comparison
Assume TD = 25, p0 = 325, and Δt = 1
and A = 1
• Note that response of a digital Derivative controller
is slower than that of an analog Derivative controller
by the value of Δt
• As well, step change response is not an impulse,
but instead a square wave occurs of amplitude
equal to TD/Δt; the smaller is Δt, the closer to infinity
• Similarly, response to a sine wave of frequency ω
does not lead by 90° as it is supposed to, but rather
by a value decreased by Δt·ω converted to degrees.
The Digital Equation for PID Control
Instead of using Kc , TI , and TD parameters with
the error signal, it can be more convenient to
express the equation as a time-series with the
current, previous, and past-previous errors:
p(t) = p(t–1) + K1*ε(t) + K2*ε(t–1) + K3*ε(t–2)
where
K1 = + Kc + Δt/2TI + TD /Δt
K2 = –Kc + Δt/2TI – 2TD /Δt
K3 = + TD /Δt
PID Tuning – Continuous Oscillation
This is a Closed-Loop study developed by ZieglerNichols in the late 1940s for stable processes:
1.
2.
3.
4.
5.
Set the system to P control with a low gain
Increase the gain until continuous oscillations occur
Record this value as the critical controller gain Kc(c)
Record the period of oscillation, P(c)
Controller parameters are shown on the next slide
PID Tuning – Continuous Oscillation
Control Mode
P
PI
PID
Kc
0.5Kc(c)
0.45Kc(c)
0.6Kc(c)
TI
0.833P(c)
0.500P(c)
TD
0.125P(c)
These settings were designed to achieve an under-damped
response to a step change for processes that can be modelled
by the following Laplace Transform:
- This is a First Order process with a pure time delay (dead time)
PID Tuning – Continuous Oscillation
Results of the Ziegler-Nichols Continuous Oscillation
method for a First Order process with delay time.
(R = Td/Tp)
R = 0.1
R = 0.5
R = 2.0
PID Tuning - Reaction Curve Method
A process model can be obtained from an Open-Loop test:
1. Operate the process in open loop (i.e., no control)
2. Allow it to run at a typical operating point y(t) = yo with
input held constant at u(t) = uo. (steady-state conditions)
3. At time to=0, apply a step change to the process input,
from uo to u∞ (use a range of 5 to 20% of full scale)
4. Record output until it reaches a new steady state value
5. The curve will resemble an S-shape curve known as the
Process Reaction Curve
PID Tuning - Reaction Curve Method
Typical open-loop process response to a stepchange in the input variable:
The model is considered a First Order process with
a pure time delay.
The key parameters are Kp , Tp , and Td and the
transform equation is
u(t)
y(t)
PID Tuning - Reaction Curve Method
Compute the model parameters as follows:
Kp = (y∞ – y0) / (u∞ – u0)
Tp = t32 – t1
y(t) = 0.632*(y∞ – y0)
Td = t1 – t0
t3
u(t)
y(t)
A Better Diagram
http://blog.opticontrols.com/wp-content/uploads/2011/06/measuring-td-and-tau.png
Ziegler-Nichols Tuning Rules
Design objective: achieve a damping in response
to a step change of 4:1 for first and second peaks
in the response curve (quarter decay ratios).
Quarter Amplitude Damping. Each successive peak is
1/4 of the amplitude of the previous peak.
Ziegler-Nichols Tuning Rules
Design objective: achieve a damping in response
to a step change of 4:1 for first and second peaks
in the response curve (quarter decay ratios).
Control Mode
P
PI
PID
Kc
1.0/KpR
0.9/KpR
1.2/KpR
TI
3.0Td
2.0Td
TD
0.5Td
where R = Td / Tp and Kp is the process gain
Caution with Quarter-Amplitude Damping
Tuning based on quarter-amplitude damping does provide fast response
to a new steady-state regime.
It is oscillatory and may interact poorly with other similarly-tuned loops.
This type of tuning leaves the system in a position of possible instability
if the process gain or delay ("dead") time doubles .
To "fix" both problems, take half the value of the controller gain.
So, if the rule recommends using a controller gain of 1.6, use only 0.8.
This will prevent severe oscillation about the set point and provide an
acceptable margin of stability. Response time, of course, will suffer.
Cohen and Coon Tuning Rules
Similar design objective but provides better
tuning for R values (Td /Tp) above 0.2
Control
Mode
Kc
TI
TD
P
1.0/KpR
-
-
PI
0.9/KpR
3.0Td
-
PID
1.2/KpR
2.0Td
0.5Td
Cohen and Coon Tuning Rules
Similar design objective but provides better
tuning for R values (Td /Tp) above 0.2
Control
Mode
Kc
TI
TD
P
(3 + R)
3KpR
-
-
PI
(10.8 + R)
12KpR
Td (30 + 3R)
(9 + 20R)
-
PID
(16 + 3R)
12KpR
Td (32 + 6R)
(13 + 8R)
4Td
(11 + 2R)
Comparison of Tuning Rules
R
R
R
R
R
R
R = 5.0
Pure Delay vs. Process Time Lag
The Digital Equation for PID Control
p(t) = p(t–1) + K1*ε(t) + K2*ε(t–1) + K3*ε(t–2)
where
K1 = + Kc + Δt/2TI + TD /Δt
K2 = –Kc + Δt/2TI – 2TD /Δt
K3 = + TD /Δt
To achieve quarter decay ratios:
K1 = (+A + Δt/BTd + CKpTd /Δt)/Kp
K2 = (–A + Δt/BTd – 2CKpTd /Δt)/Kp
K3 =
+ CTd /Δt
where A , B , and C are derived from Ziegler-Nichols or
Cohen-Coon rules as follows:
The Digital Equation for PID Control
For Ziegler-Nichols rules (R = Td/Tp):
A = 1.2/R
B = 4.0
C = 0.5
For Cohen-Coon rules (R = Td/Tp):
A = (16 + 3R)/12R
B = 2(32 + 6R)/(13 + 8R)
C = 4 /(11 + 2R)
"Optimum" PID values from Open-Loop Tuning Rules
Method
CohenCoon
ZeiglerNichols
Coefficient
R = Td/Tp
0.0
0.1
0.2
0.4
0.6
0.8
1.0
1.2
A
(max)
13.6
6.9
3.6
2.5
1.9
1.6
1.4
B
4.9
4.7
4.5
4.2
4.0
3.8
3.6
3.5
C
0.36
0.36
0.35
0.34
0.33
0.32
0.31
0.30
A
(max)
12.0
6.0
3.0
2.0
1.5
1.2
1.0
B
4.0
4.0
4.0
4.0
4.0
4.0
4.0
4.0
C
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
Cohen & Coon use a higher Proportional control effect compared to Zeigler-Nichols for
all sensible values of R.
Cohen & Coon use a slightly lower Integral control effect compared to Zeigler-Nichols
for values of R < 0.6 and a slightly higher Integral control effect for R > 0.6.
Cohen & Coon use a lower Derivative control compared to Z-N for all sensible R values.
The Influence of Sampling Time
In many cases, the feedback loop generates a measurement
sample every "x" minutes.
With on-stream analysers, a sample multiplexer is used to
present multiple streams one at a time to the X-ray scintillator.
Each sample is read for a period of 20-30 seconds and the
total count is recorded, passed through a calibration equation,
and the stream assay output from the unit.
The delay between consecutive samples of the same stream is
typically 7–12 minutes and can be as high as 15 minutes.
The effect of this time delay on control is considerable.
The Influence of Sampling Time
Effect of sampling time on the control system response of a first order process with a
pure time lag (dead time). Time units are arbitrary, but the Δt value is expressed in
the same units as the process time constant.
Aliasing
• Time delays from sampling intervals can
introduce aliasing into the time series analysis
Aliasing
• Basically, high frequencies in a signals are lost
and may appear as lower frequency signals:
Anti-Aliasing
• Generally anti-aliasing filters are reserved for
audio and video signals to filter out noise
• Not strictly a problem in mineral processing,
but it must be recognized that frequency of
measurement should be higher than the
maximum frequency of the variable changes.
Sampling Rate
Sampling rate (or frequency) defines the number of samples
per unit time (seconds or minutes) taken from a continuous
signal to make a discrete signal.
The sampling rate unit is Hertz (1/s, s−1)
The reciprocal of the sampling frequency is sampling period
(or interval), i.e., time between samples.
Nyquist–Shannon sampling theory states that perfect
reconstruction of a signal is possible when sampling frequency is
greater than 2 times the maximum frequency of the signal, or
equivalently, when the Nyquist frequency (0.5 x sampling rate)
exceeds the highest frequency of the signal being sampled.
From experience, a sampling interval of approximately 10% of
the dominant time constant works well in practice.