Lumped Parameters - University of Toledo
advertisement

Professor Walter W. Olson
Department of Mechanical, Industrial and Manufacturing Engineering
University of Toledo
Lumped Parameter Systems
Outline of Today’s Lecture
Review
Engineering Modeling Procedure
State Space Models
Lumped Parameter Systems
DC Armature control motor
Balance Systems
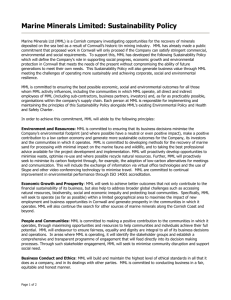
Models
SENSE
REAL WORLD
OBSERVATIONS
FORMULATE
TEST
EXPLANATION/
PREDICTION
INTERPRET
MATHEMATICAL
MODEL
Engineering Modeling Procedure
Understand the problem
What are the factors and relevant relationships?
What assumptions can be made?
What equilibrium conditions exist?
What should the result look like?
Draw and label an engineering sketch
Free body diagram
Hydraulic schematic
Electrical schematic
Write the equilibrium equations (usually differential or difference)
Newton 2nd Law
Kirchoff Laws for current and voltages
Flow continuity laws
Solve the equations for the desired result
Check the validity of the results
Modeling is an Iterative Process
Understand
the Problem
Can you
formulate a
model?
Sketch
YES
Mathematical
Model
NO
NO
YES
NO
YES
Use the
Model
Do the
results
represent
reality?
Can you
solve the
model?
Validate
the Results
Solve
the Model
Modeling Terms
System: a functional group of interrelated things
State: A condition (which may or may not be physical) of the system
regarding form, structure, location, thermodynamics or composition
State vector: a collection of variables that fully describe the object
over time
Input: an external object provide to the system
Output: a dependent variable (often a state) from within the system
that can be measured or quantified
Dynamics: a chance process of the state variables over time
State Space Formulation
Continuous Models
Let x be a vector formed of the state variables
x {x1(t ), x2 (t ),...}T
The number of components of the state vector is called the order
Formulate the system as
dx
Ax Bu
dt
y Cx Du
State Transition Equation
Output Equation
The matrices A, B, C and D have constant elements
The matrix A is the called the State Dynamics Matrix
The matrix B is called the Input or Control Matrix
The matrix C is called the Output or Sensor Matrix
The matrix D is called the Pass Through or Direct term
State Space Formulation
Discrete Models
Let x be a vector formed of the state variables
x {x1(t ), x2 (t ),...}T
The number of components of the state vector is called the order
Formulate the system as
h Time Step Size, often assumed to be 1
x(t h) h Ax(t ) Bu(t )
y (t ) Cx(t ) Du(t )
State Transition Equation
Output Equation
The matrices A, B, C and D have constant elements
The matrix A is the called the State Dynamics Matrix
The matrix B is called the Input or Control Matrix
The matrix C is called the Output or Sensor Matrix
The matrix D is called the Pass Through or Direct term
State Space Formulation
Procedure:
Develop the equations of equilibrium
Put the equilibrium equations in the form of the highest
derivative equal the remainder of the terms
Make a choice of states, the input and the outputs
Write the equilibrium equations in terms of the state variables
Construct the dynamics, the input, the output and the pass
through matrices
Write the state space formulation
Distributed vs. Lumped
Parameters
Distributed parameter
Analysis is at the material
element level
Partial differential equations
describe the transfer of force
from the constitutive equations
FEM/BEM often used
Lumped parameter
Analysis is at the component level
Component properties are self
contained and complete
ODE/Diff E based on linking
component parameters
Equations solved analytically or
numerically
Distributed vs. Lumped
Parameters
Distributed parameter systems
physically better descriptions
more accurate results when done correctly
Lumped parameter systems
simpler
quicker results
?
Both can be used in building controls
Lumped parameter descriptions are appropriate when the
property being examined is of much greater magnitude than the
added accuracy that would be gained using a distributed parameter
model
Lumped Parameter Variables
From Richard C. Dorf, Modern Control Systems, 6 ed.
Mechanical Systems
What are the noises from wheel speed?
Determine the number of equations
need form the number of inertial
coordinates (qe,qd,qa,and qw)
and their linkages
Equilibrium Equations Needed:
1. Engine to clutch
T J cq d bc q e q d
2. Clutch to transmission
J cq d kd q d N tf q a 0
3. Transmission to wheel
J tq a kd N tf q a q d ka (q a q w ) 0
4. Wheel to ground
J wqw btqw ka (qw qa ) ktqw 0
Mechanical Systems
What are the noises from wheel speed?
bcq d T bcq e kd N tf q a kd qd
J cq d kd q d N tf q a 0 J cq d kd N tf q a kd q d
T J cq d bc q e q d J cq d T bc q e q d
J tq a kd N tf q a q d ka (q a q w ) 0 J tq a kd q d kd N tf ka qa kaq w
J wq w btq w ka (q w q a ) ktq w 0 J wq w btq w kaq a ka kt q w
Inputs are T and q . The Output is q w
State variables are q d ,q a ,q a ,q w ,q w
kd
b
c
q d
q 0
a
d kd
q a
dt J t
q w 0
q w
0
kd N tf
0
0
1
0
0
ka
Jt
0
0
0
ka
Jw
0
bc
0
kd N tf ka
Jt
q d
q
a
y 0 0 0 0 1 q a
q w
q w
k a kt
Jw
0
q 1
d
0 bc
q a
0
0 q a
0
q w
0
1
q w
b
0
t
J w
1
0
T q e
0
0
0
Lumped Parameter Model of an
Armature Controlled DC Motor
dia
Voltage
Loop:
L
Ra ia Vb Va
a
dt
Back Voltage: V K dq
b
b
dt
Motor Torque: T Kia
2
Rotations NSL: J d q b dq T
dt
dt
Ra ia K b dq Va
dia
dt
La
La dt La
2
d q Kia b dq
dt
J
J dt
dq
State vector ia ,
ia ,
dt
Input is Va Output is
What is the speed?
Assume the friction term is f bq
Ra
d ia La
dt K
J
i
y 0 1 a
Kb
1
La ia
La Va
b
0
J
Lumped Parameter Model of an
Armature Controlled DC Motor
Assume the friction term is f bq
dia
Voltage Loop: La dt Ra ia Vb Va
Back Voltage: V K dq
b
b
dt
Motor Torque: T Kia
2
Rotations NSL: J d q b dq T
dt
dt
Ra ia K b dq Va
dia
dt L L dt L
a
a
a
2
d q Kia b dq
dt
J
J dt
dq
State vector ia ,
ia ,
dt
Input is Va Output is
What is the speed?
Ra
d ia La
dt K
J
Kb
1
La ia
La Va
b
0
J
Note how the mechanical
and the electrical domains
were put together here:
1) KVL for the electrical
2) NSL for the mechanical
3) Relationship or coupling
equation between the two
i
y 0 1 a
Is this a good model
for motor angle?
In a controls problem,
sometimes called
Mechatronics, this is often
necessary
Lumped Parameter Model of an
Armature Controlled DC Motor
dia
Voltage Loop: La dt Ra ia Vb Va
Back Voltage: V K dq
b
b
dt
Motor Torque: T Kia
2
Rotations NSL: J d q b dq T
dt
dt
Ra ia K b dq Va
dia
dt L L dt L
a
a
a
2
d q Kia b dq
dt
J
J dt
dq
State vector ia ,
, q ia , ,q
dt
Input is Va Output is q
What is the motor angle?
Same process,
different question,
different formulation
Ra
L
ia a
d K
dt J
q
0
ia
y 0 0 1
q
Kb
La
b
J
1
0
ia 1
0 0 Va
q 0
0
Lumped Parameter Model of an
Armature Controlled DC Motor
Voltage Loop: Ra ia Vb Va
dq
Back Voltage: Vb K b
dt
Motor Torque: T Kia
d 2q
dq
Rotations
NSL:
J
b
T
dt
dt
K b dq Va
i
a
Ra dt Ra
b KK b dq KVa
d 2q
2
dt
J
JR
dt
JRa
Ki
d
q
b
d
q
a
a
dt
J
J dt
What is the motor angle?
If the inductance La is small such
that it can be neglected, then
another simpler formulation is
dq
State vector ,q ,q
dt
Input is Va Output is q
bRa KK b
d
JRa
dt q
1
y 0 1
q
K
0
JR V
q a a
0
0
Balance Systems
A large number of control problems are called balance systems
where an object must be maintained in technically an
unstable position
Balance Dynamics
General Dynamics Equation form is
M (q, q, q) C q, q B(q, q, q, u)
External Forcing terms
Energy Dissipating (Rayleigh) Terms
Energy Conserving Terms
This equation is usually nonlinear
Example: Inverted Pendulum
d2
NSL in p direction: Mp m 2 ( p l sin q ) bp F
dt
Mp m p l ( sin qq 2 cosqq ) bp F
M m p ml sin qq 2 ml cosqq bp F
NSL about pivot: J ml 2 q mlp cos q mgl sin q q 0
0
M m ml cos q p 0 ml sin q 0 b 0 p
F
ml cos q J ml 2 q 0
q 2 0 q mgl sin q 0
0
Where b is the viscous friction at the wheels and is the viscous friction in the pin
Clearly Nonlinear
Example: Inverted Pendulum
Assuming q and q are small, then sin q q , cos q 1 and qq 2 0
without the friction terms,
0
M m ml cos q p 0 ml sin q 0
F
ml cos q J ml 2 q 0
q 2 mgl sin q 0
0
ml p 0 0 F
M m
2
ml
q 0
J
ml
q
mgl
M m p mlq
2
J
ml
q
mlp
mgl
q
0
F
2
F mlq J ml q mglq
M
m
ml
J ml 2 q mglq
ml
q
( g ( M m )q F )
p
2
J
(
M
m
)
Mml
ml
F mlq
p
M m
F M m p
ml
( p gq )
q
2
ml
J
ml
ml
1
ml
2 2
2
p
(
gm
l
q
(
J
ml
)F )
q
(
p
g
q
)
2
J ( M m ) Mml
J ml 2
F M m p
Example: Inverted Pendulum
1
m 2 l 2 gq F J ml 2
2
J ( M m ) Mml
ml
q
gq ( M m) F
J ( M m ) Mml 2
p
0
p
0
d p
dt q 0
q 0
1
0
m2l 2 g
0
J ( M m ) Mml 2
0
0
mlg ( M m )
0
J ( M m ) Mml 2
p
p
y 0 0 1 0
q
q
0
0
p
2
J
ml
0
p J ( M m ) Mml 2
F
1 q
0
q
ml
0
J ( M m ) Mml 2
Summary
Lumped Parameter vs. Distributed Parameter Systems
Distributed parameter systems:
Material element level
Partial differential equations describe the transfer of force from the
constitutive equations
Lumped Parameter Systems
Component level
Component properties are self contained and complete with ODE/Diff E based
on linking component parameters for equilibrium equations
Mechanical system equations
Electric Motor
Balance systems
Next Class: Matlab and Simulink