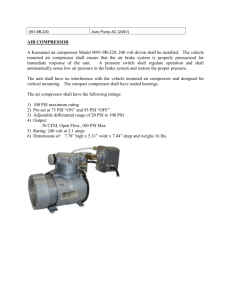
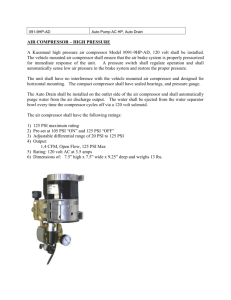
Introduction to Pneumatics
advertisement

Slides by Raul Olivera from FRC 111 – WildStang › Presentation from the FIRST Championships in 2008 › http://first.wpi.edu/Images/CMS/First/2008C ON_Pneumatic_Power_Olivera.ppt FRC 358 › Lots of great resources! › http://team358.org/files/pneumatic/ FIRST Pneumatics Manual › http://www.usfirst.org/roboticsprograms/frc/ 2012-kit-of-parts-pneumatics Pneumatics: › “The study of the mechanical properties of air and other gases” › The system on an FRC robot which uses pressurized air to transfer force Pressure = matter pushing against matter › Object pushing against another object Absolute (psia): true matter-based pressure › 0 psia - no matter present to press against objects › Not too important in our designs Gauge (psig): Relative to Atmosphere › 0 psig - pressure in equilibrium with atmosphere › All regulators and gauges based on this › At sea level: 0 psig = ~14.7 psia Pressure = Force / Area Force = Pressure X Area Example: 30 psig in 2” diameter cylinder 30 psig Area = pr2 = p(1”)2 = 3.14 in2 94.2 lbs Force = 30 psi X 3.14 in2 = 94.2 lbs Low to high force applications › Up to 188 lbs (plus any mechanical advantage in design) › Can vary force by changing pressure Linear and rotational motion Two positions Flexible design options › Linear is much more common › Great for applications where a motor would stall › Open/close or on/off applications Claws, lifters, pushers, pokers, levers Shifters and clutches › Excess cylinder length can be accommodated in design Move mounting point Push against rigid object › Can start match with force applied, and keep it applied at end of match Relatively straightforward rules and implementation › › › › Mounting hardware included Easy interface to robot Can test manually without code FIRST provides instructions! Economy of scale – easy to add more later Easy to transfer energy from robot “base” to manipulator › Flexible tubes › Don’t need chain, belt, or perfectly aligned shafts › All components except for cylinder can be mounted anywhere High Pressure (120 psi) Working Pressure (60 psi) Optional Lower Working Pressure (30 psi) Compressor › Mount with rubber vibration isolation mounts › Must power with Spike relay with 20 amp breaker (not fuse) › Gets hot! Pressure Relief Valve (Norgren) › Must be installed on output of compressor › Vents at 120 psi for safety (in case your code to shut off compressor doesn’t work right …) › Must check that this is calibrated properly Pressure switch (Nason) › Normally closed (compressor runs) › Opens at ~115 psi (code to turn compressor off when switch is open) › Wire to digital input and ground on digital sidecar Accumulator (Air Tank) › Check rules regarding # allowed › Make sure to mount on high pressure side to take advantage of higher pressure storage! Primary Regulator (Norgren) › Restricts working pressure to 60 psi max on output side of regulator › Can adjust to less than 60 psi if desired › Make sure arrow points in direction of air flow! Secondary Regulator (Monnier) › Yellow ring › Allows additional lower pressure circuit if desired Gauges › Provide readout of pressure in line › Place one on high pressure side and one on working pressure side (can attach directly to regulator) Plug Valve (manual release valve) › Install on high pressure side › Must be able to release all pressure in system › Must be easily accessed and labeled on your robot Cylinders (aka “Pistons”) › Donated by Bimba › Order to team specifications from FIRST- specific options › Single or double acting Single = spring-based return when vented Double = air pressure drives both directions › Magnetic position sensing option Solenoid valves (Festo/SMC) › Switches direction of air flow to drive cylinder motion › Connect to solenoid breakout on CRIO › Need a double solenoid to drive double acting cylinder › Can activate manually with blue buttons Safety › Pressurized air has a lot of potential energy › Follow rules EXACTLY and be careful Rotation › Difficult to control orientation of the end of a round shaft Leaks › Can be hard to find – so prevent them with good assembly technique! Cut tubing straight and clean Tighten fittings with proper tools › Use methodical approach to narrow in on one area Pipe thread wrap › Too much is not a good thing › Leave last 2 threads clear › Avoid getting into valves and hoses Extra components › Bring spec sheets for non-KOP items to inspection Cylinders are sensitive to side loads “Pulling” force is slightly reduced due to area of rod Large cylinders use a lot of air – make sure your compressor and storage can keep up with expected use Plug valve must be closed before you start the match! MYTH: Using pneumatics is complicated FACT: › Simple system with detailed instructions, and it’s the same every time! › Robust system with fewer parts to fail MYTH: Pneumatics is heavy FACT: › 2013 compressor is only 2.5 lbs Could be left off robot to save weight (check rules in 2014!) › Cylinders have high force/weight ratio (compare to CIM+gearbox+chain+speed controller…) › Adding a second, third, etc. cylinder is trivial › Plastic air tanks are available › Solenoid and tubing weights are negligible MYTH: Pneumatic cylinders are uncontrollable FACT: › Flow control valves can slow down motion › Can choose piston length based on geometry › Magnetic reed switches can be used to sense piston position MYTH: Pneumatics is difficult to program FACT: › Program compressor to run when pressure switch is closed – connected directly to digital sidecar › Double solenoid consists of two on/off switches – when one is on, other is off! Use all 24v or 12v solenoids – don’t mix! Even if you aren’t using pneumatics on your robot, take advantage of the Bimba donation – play with them in the off-season or have on hand for next year! Solenoids need a minimum pressure (~30 psi) to work. Test your code with pressure in the system! Clevis pins can be replaced with bolts for more mounting options