Lecture 12 - University of Toledo
advertisement

D
u
S
-1
S
S
c1
c2
z1
…
…
z2
a1
a2
S
S
S
S
cn-1
cn
zn-1
an-1
…
S
Professor Walter W. Olson
Department of Mechanical, Industrial and Manufacturing Engineering
University of Toledo
System Solutions
zn
an
y
Outline of Today’s Lecture
Review
Convolution Equation
Impulse Response
Step Response
Frequency Response
Linearization
Reachability
Testing for Reachability
Transformations
We can transform our state space representation to other
state variables (different that the ones in use).
Mathematically, this is called a change of basis vectors.
Why would we ant to do this?
To make the problem easier to solve!
To isolate a particular property of the system
To uncouple the modes of the system
Transformations
Say we have some matrix T that is invertible (this is important)
which results in the vector z when x is premultiplied by T. We
then say that we have transformed the vector x into z, or
alternatively, we have transformed x into z:
x1
t1 1
z T x w here x ... , T is ...
x n
t n 1
xT
1
T hen
T
d
d
x
1
...
T
1
z1
exists, an d z ...
z n
z T ( Ax Bu ) TAx TBu TAT
dt
z Du
L et A T A T
d
...
t1 n
... ,
t n n
z
dt
y CT
...
1
z Az Bu
dt
y Cz Du
,
B TB ,
and C C T
1
. T hen
1
z T B u and
Convolution Equation
y (t ) C e
A(t )
x (0 )
t
Ce
A ( t )
B u ( ) d D u ( t )
0
is called the “Convolution Equation”
Expresses the effect of an input on the system
What is convolution?
a twisting or folding together of two things
A convolution is found in many phenomena:
A sound that bounces off of a wall and interacts with the source
sound is a convolution
A shadow is a convolution between the light source and the object
producing the shadow
In statistics, a moving average is a convolution
The Impulse Function
Imagine a function that has a shape that is infinitesimally thin
in the independent variable but infinitely high domain or
response:
In other words this is a very long and sharp spike
This is what we try to model with the impulse function
Mathematically we define the Dirac Delta Function, d(t), also
called the Impulse Function by
0
1
u ( t ) p ( t )
0
d ( t ) lim p ( t )
0
t0
0t
t
System Response
u (t ) d (t )
y (t ) C e
y (t ) C e
A(t )
x (0 )
t
Ce
x (0 )
A ( t )
t
Ce
A ( t )
B u ( ) d D u ( t )
0
Bd (t )d D u (t ) C e
A(t )
x (0 ) C e
A(t )
B D u (t )
0
If
T hen
A(t )
h (t )
y (t ) C e
t
Ce
A ( t )
Bd (t )d C e
A(t )
B
0
A(t )
x (0 )
t
h ( t ) u ( ) d D u ( t )
0
Since our system is linear and we can add solutions, we can
approximate the response as a sum of the convolutions of h(t-)d(t)
y(t)
+ + + + +…
12 345
t
System Response
S(t)
A unit step is defined as
0
S (t )
1
t0
1
t>0
t
With zero initial conditions
y (t )
t
Ce
A ( t )
B S ( ) d D S ( t )
0
t
C e
A ( t )
Overshoot
Mp
Bd D
0
t
C e
A
0
1
Bd D C A e
1
A
1
CA e B CA B D
At
}
}
Transient
Steady
State
B
t
0
d
{
Steady State
Rise time, tr
Transient period=settling time, ts
System Response
Another common test function is a sinusoid for frequency
response
u ( t ) cos t
e
i t
e
i t
2
Since we have a linear system, we only need
u (t ) e
st
where s i
and assuming that the eigenvalues A do not equal s
y ( t ) C e x (0 )
At
t
Ce
s
Be d D e
At
t
e
sI A
At
st
At
x (0 ) ( sI A )
1
1
e sI A t I B D e st
B C sI A
1
BD e
st
}
}
Ce
s
Be d D e
0
C e x (0 ) C e ( sI A )
At
st
0
C e x (0 ) C e
At
A ( t )
Transient
Steady
State
System Response:
Frequency Response
Time history with respect to a sinusoid:
Phase
Shift, DT
Amplitude
Ay
Amplitude
Au
Input Sin(t)
G ain
Ay
Au
Period,T
Transient Response
P hase 2
DT
T
System Response
Frequency Response
y (t ) C e
At
x (0 ) ( sI A )
y ss ( t ) C sI A
1
1
B C sI A
BD e
st
i
Me e
st
1
Me
B D e
i st
M is the magnitude and is the phase
G ain
Ay
M
Au
1
D C G ain M 0 C A B D
P hase 2
DT
T
y ss ( t ) M cos( t )
st
Linearization
Good solutions for the Linear Model
Equally good techniques for the Nonlinear Model are not
easy to come by
What if the Nonlinear Model is well enough behaved in the
region of interest so that we could apply Linear techniques
strictly to that region?
We did this with the inverted pendulum!
We assumed small angles!
Linearization Techniques
Ignore the nonlinearity
In some cases, the nonlinearity has a relatively small effect
In those cases, build a linear system and treat the nonlinearity as a
disturbance
Small angle approximations sin
cos 1
Often only useful near equilibrium points
Taylor Series Truncation about an operating point
0
f ( x a ) f (a ) x
df ( a )
dx
1
2
2
x
2
d f (a )
dx
2
...
Assumes that 2nd and higher orders are negligible
Feedback linearization
Reachability
Consider the following problem:
With the linkage below, can you control the position of p?
y
y’
yp
x’
u(t)
x
p
Reachability
We define reachability (often times called controllability) by the
following:
A state in a system is reachable if for any valid states of the system,
say, initial state at time t=0, x0 , and a state xf , there exists a solution
for t>0 such that x(0) = x0 and x(t)=xf.
There are systems which we can not control
the states are not reachable with our input.
There in designing control systems, it is important to know if the
system is controllable.
This is closely linked with the concept of ergodicity of the system
in which we ask the question whether or not it is possible to with
some measure of our system to measure every possible state of the
system.
Reachability Testing
d
x Ax Bu
and y C x D u w here x (0 ) 0 and D 0
dt
x (t )
t
e
A ( t )
0
B u d
Im pulse response is x d
t
e
A ( t )
0
B d d e B
At
T he response to the rate of change in th e im pulse response is
xd
dx d
Ae B
At
dt
for u ( t ) 1d t d t , the response w ould then be x ( t ) 1 e B 2 A e B
At
C ontinuing the process through further d erivatives, w e get for
u ( t ) 1d t 2 d t 3 d t 4 d
( n 1)
t ... n d t
x ( t ) 1 e B 2 A e B 3 A e B 4 A e B ... n A
At
At
2
At
3
At
lim x ( t ) 1 B 2 A B 3 A B 4 A B ... n A
2
t 0
lim x ( t ) B
t 0
W r B
AB
AB
A
A
n 1
n 1
3
n 1
n 1
B
B
B is called the reachability m atrix
At
e B
At
Reachability
For the system,
d
,
x Ax Bu
and y C x D u
dt
all of the states of the system are reachable if and only if Wr is
invertible where Wr is given by
W r B
AB
A
n 1
B
State Space Formulation
T o p u t it in th e d esired fo rm
Is this a reachable system?
L et z1 z , z 2 z , z 3 z u ,
z4 zu
T h en w e can w rite
z1 z 2
z3 z4
m z bz kz bz u kz u
m u z u bz u ( k k t ) z u k t z r bz kz
m z bz kz bz u kz u
m u z u bz u ( k k t ) z u k t z r bz kz
T he state variables are
z, z, zu , zu
u z r is the input airfield profile
T he output i s z, the nose deflection
z2
z4
0
z1 k
m
d z2
=
dt z3 0
z4 k
m
u
kz1
m
kz1
m
mu
bz 2
k
m
m
0
0
b
mu
bz 4
y 1
0
0
z1
z2
0
z3
z4
bz 4
mu
kt zr
mu
0
z
b
1
0
m z2
0 u
1 z3
kt
b z4
m u
m u
m 5, 000, 00 0
T
m
(k k t ) z3
0
k kt
mu
kz 3
mu
0
b
m
mu
1
bz 2
mu 50
k 250, 000
k t 1, 250, 000
b 125, 000
Example
z1 0
0.05
d z2
=
dt z3 0
z 4 5000
1
0
0.025
0.05
0
0
2500
30000
0.05
125
2
A
5000
7
1.25 * 10
W r B
AB
0.025
0.05
62.4 5
750
2500
30000
6.245 * 10
125
312300
3
A
7
1.25 * 10
10
3.11 * 10
156000
6.245 * 10
1.554 * 10
A B
6
7.5 * 10
62.45
2500
6
6.22 * 10
7
62.45
1.874 * 10
6
10
0
625
AB
25000
7
6.25 * 10
7.5 * 10
6
7
1.866 * 10
0
0
3
A B
0
25000
625
6
1.562 * 10
2
A B
7
6.25 * 10
11
1.555 * 10
0.025
750
62.45
2
z1 0
z
0.025
0
2
u
1 z3 0
2500 z 4 25000
0
11
1.561 * 10 6
9
3.884
*
10
2
A B
11
1.555 * 10
14
3.869 * 10
155400
6
6.22 * 10
10
1.548 * 10
0
625
625
1.562 * 10
25000
6.25 * 10
6.25 * 10
7
1.555 * 10
6
7
11
6
1.561 * 10
9
3.884 * 10
11
1.555 * 10
14
3.869 * 10
Example
W r B
Wr
1
AB
0.9958
23.75
1.975
0.00079
2
A B
0
0
3
A B
0
25000
23.75
0.4938
10
0.25
0.9992
0.02498
0. 0004
0.00001
0
625
625
1.562 * 10
25000
6.25 * 10
6.25 * 10
0.00004
0
0
0
7
1.555 * 10
6
7
11
6
1.561 * 10
9
3.884 * 10
11
1.555 * 10
14
3.869 * 10
T he inverse of the reachability m a trix exists
Since the inverse of the reachability matrix exists, the system
is reachable and controllable.
Matlab
Matlab has the function ctrb(A,B) which will compute the
reachability matrix:
>> A=[0 1 0 0; -0.05 -0.025 0.05 0.025;...
0 0 0 1; 5000 2500 -30000 -2500]
A=
1.0e+004 *
0 0.0001
0
0
-0.0000 -0.0000 0.0000 0.0000
0
0
0 0.0001
0.5000 0.2500 -3.0000 -0.2500
>> B = [0;0;0;25000]
B=
0
0
0
25000
>> Wr=ctrb(A,B)
Wr =
1.0e+014 *
0
0 0.0000 -0.0000
0 0.0000 -0.0000 0.0000
0 0.0000 -0.0000 0.0016
0.0000 -0.0000 0.0016 -3.8688
>> inv(Wr)
Warning: Matrix is close to singular or badly
scaled. Results may be inaccurate. RCOND =
9.669679e-017.
ans =
0.9937 23.7500 -0.4938 0.0000
23.7500 -10.0000 0.2500
0
1.9750 -0.9992 0.0250
0
0.0008 -0.0004 0.0000
0
Canonical Forms
The word “canonical” means prescribed
In Control Theory there a number transformations that can
be made to put a system into a certain canonical form where
the structure of the system is readily recognized
One such form is the Controllable or Reachable Canonical
form.
Reachable Canonical Form
A system is in the reachable canonical form if it has the structure
z1 a 1
z2
1
d
z3 0
dt
...
...
z n 0
y b1
b2
b3
a2
a3
...
0
0
...
1
0
...
0
0
1
a n z1 1
z
0
0
2
0 z3 0 u
...
...
0
0 z n 0
bn z D u
...
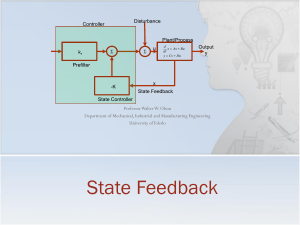
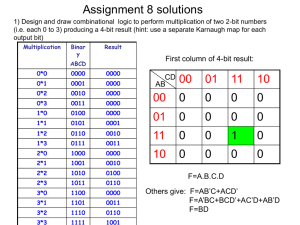
Such a structure can be represented by blocks as
D
u
S
-1
S
S
c1
c2
z1
…
…
z2
a1
a2
S
S
S
S
cn-1
cn
zn-1
an-1
…
S
zn
an
y
Reachable Canonical Form
It can be shown that the characteristic polynomial is
A I a1
n
n 1
a2
n2
... a n 1 a n
2
To convert to Reachable Canonical Form, consider the
transformation
A TA T
W
r
1
B TB
n 1
B
AB
A B TA T
1
A
B
TB TA B
2
A B ( TA T
n
...
1
) TB TA T
2
1
TA T
1
TB TA B
2
A B TA B
W
r
n
T B
AB
...
A
n 1
B TW r T W rW r
1
Reachability Canonical Form
a1
1
A 0
...
0
W
r
B
a2
a3
...
1
an
0
0
...
0
0
0
...
1
0
...
A
...
0
0
AB
A B
n 1
2
1
0
B 0
0
0
C CT
1
B
for a 4 state variable state m atrix,
W
r
1
0
0
0
a1
a1 a 2
1
a1
0
1
0
0
a1 2 a1a 2 a 3
2
a1 a 2
a1
1
2
3
w here the a i are the coefficients of the c haracteristic polyn o m ia l
I A a1 a 2 a 3 a 4
4
3
2
Example: Inverted Pendulum
Develop the reachability canonical
form for the Segway using the inverted
pendulum model of Lecture 5
0
0
A
0
0
1
0
0
6.405
0
0
0
7.205
0
0
1
0
0
0.01837
B
0
0.008163
T he eigenvalues of A are {2.684, 2.684, 0., 0.}
0
0
AB
0
0
U sing the m odel developed in L ecture 5 for the inverted pendulum
0
x
0
d v
dt
0
0
y 0
1
1
0
2 2
0
m l g
J (M m) Mml
0
0
0
0
m lg ( M m )
J (M m) Mml
x
v
0
2
2
0
0
x
J ml2
0
2
v
J (M m) Mml
1
0
ml
0
2
J ( M m ) M m l
M 10 kg
w ith
m 80 kg
l 1m
J 100 kg m / s
2
2
F
0
0
2
A B
0
0
1
0
0
6.405
0
0
0
7.205
1
0
0
6.405
0
0
0
7.205
0.05228
0.
3
A B
0.05882
0.
0
0
0.01837
0
0.01837
0.
1
0
0.008163
0 0.00816 3
0.
0 0
0 0
1 0
0 0
1
0
0
6.405
0
0
0
7.205
0
0
0.
0
0.01837
0.05228
1
0
0.
0 0.008163 0.05882
Example
W r B
A B
0
0.01837
Wr
0
0.0081633
T W rW r
A TA T
1
0
1.
A
0
0
C CT
1
1
1
0
0
0
0.
0.
0.05228
0.008163
0.
0.
0.05 882
0
7.2051
1.
0
0.
1.
0.
0.
7.205
0
0
0
1.
0
0
1.
z1 0
1.
d z2
dz z 3 0
z4 0
4
0.01837
0
0
0
12.491
0
T he characteristic polynom ial of A is I A 7.205
3
A B
2
AB
1
0
a1
a1 a 2
1
a1
0
1
0
0
0.
7.2051
90.
0
0.
1. 12.491
90.
0.
0.
80.
12.491
0.
0.
28.10
80.
0
0.
0
28.10
0
0. 12.491
0
0
0
0
122.5
12.491
0
0.
28.10
0
0
0
0
1
0
0
0
0.05228
0.
0.05882
0.
122.5 0
0
0
28.10 0
0. 0
0
0
B TB
0
12.491
0
0.01837
0
0
0.008163
7.205
0
0
0
1.
0
0
1.
0 z1
0 z2
0 z3
0 z4
W
1
0
0
6.405
0
0
0
7. 205
0
0
122.5
12.491
0
0.
28.10
0
0
0.0801
0.008163
0
0
0
y 0
0
0
0
0.01837
1
0
0 0.008163
0
0.01837
1
0
u
0
0
r
0.008163
2
0
0
0
122.5
12.491
0
0.
28.10
0.01837
0
0
0.0801
0.008163
0
0
0
122.5
0
1
0
0.01837
0
28 .10
0
0
0 . 0.008163 0
0.08001
0
0
0
0
0
3
a1 2 a1a 2 a 3 1
2
0
a1 a 2
0
a1
1
0
0.008163
z1
z2
0.008163
z3
z4
0
0.008163
0
7.2051
1.
0
0.
1.
0.
0.
122.5
0
28.10
0.
0.08001
0
0
0
2
7.2051
0
1.
0
Summary
Reachability
A state in a system is reachable if for any valid states of the system, say,
initial state at time t=0, x0 , and a state xf , there exists a solution for t>0
such that x(0) = x0 and x(t)=xf.
Testing for Reachability
W r B
AB
For the system,
A
d
n 1
B is called the reachability m atrix
x Ax Bu
and y C x D u
,
all of the states of the system are reachable if and only if Wr is
invertible where Wr is given by
dt
W r B
AB
A
n 1
Next: State Feedback
B