PowerPoint Presentation - Missouri State University
advertisement

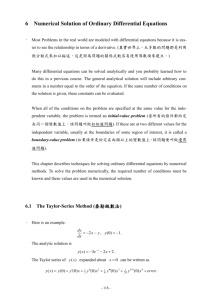
Numerical Methods To Solve Initial Value Problems An Over View of Runge-Kutta Fehlberg and Dormand and Prince Methods. William Mize Quick Refresher We are looking at Ordinary Differential Equations More specifically Initial Value Problems Simple Examples: x′ = 𝑥 + 1 Solution of: 𝑥 = 𝑒 𝑡 − 1 𝑥 0 =0 x ′ = 6𝑡 − 1 Solution of: 𝑥 = 3𝑡 2 − t + 4 𝑥 1 =6 A Problem How practical are analytical methods? ′ Equation: x = 𝑒 − 𝑡 2 −𝑠𝑖𝑛𝑡 + ln |𝑠𝑖𝑛𝑡 + 𝑡𝑎𝑛ℎ𝑡 3 | We chose to find a Numerical solution because Closed-form is to difficult to evaluate No close-form solution Some Quick Ground work First Start with Taylor Series Approximations Then Move onto Runge-Kutta Methods for Approximations Lastly onto Runge-Kutta Fehlberg and Dormand and Prince Methods for Approximation and keeping control of error How these Methods Work All of the Methods will be using a step size method. Error is determined by the size of step, order, and method used. When actually calculating these, almost always done via computer. Taylor Series Methods(Brief) Taylor Series As Follows x 𝑡 + ℎ = 𝑥 𝑡 + ℎ𝑥 ′ 𝑡 + 1 2 ′′ ℎ 𝑥 2! 𝑡 + 1 3 ′′′ 𝑡 ℎ 𝑥 3! + Most Basic is Euler’s Method x 𝑡 + ℎ ≈ 𝑥 𝑡 + ℎ𝑥 ′ 𝑡 Higher Order Approximations better Accuracy But at a cost What can we do? 1 4 ′′′′ ℎ 𝑥 4! 𝑡 +. . Runge-Kutta Methods Named After Carl Runge and Wilhelm Kutta What they do? Do the same Job as Taylor Series Method, but without the analytic differentiation. Just like Taylor Series with higher and higher order methods. Runge-Kutta Method of Order 4 Well accepted classically used algorithm. Runge-Kutta of Order 2 We don’t want to take derivatives for approximations Instead use Taylor series to create Runge-Kutta methods to approximate solution with just function evaluations. ℎ 𝑇 2 𝑡, 𝑦 = 𝑓 𝑡, 𝑦 + 𝑓 ′ 𝑡, 𝑦 2 We Want to Approximate this with 𝐴𝑓 𝑡 + 𝑏, 𝑥 + 𝑐 Find A, B, C We get: 𝐾1 = ℎ𝑓(𝑡, 𝑥) 𝐾2 = ℎ𝑓(𝑡 + ℎ, 𝑥 + 𝐾1 ) 1 2 x 𝑡 + ℎ = 𝑥 𝑡 + (𝐾1 + 𝐾2 ) Error 𝑂(ℎ2 ) Runge-Kutta of Order 4 1 x 𝑡 + ℎ = 𝑥 𝑡 + (𝐾1 + 2𝐾2 + 2𝐾3 + 𝐾4 ) 6 𝐾1 = ℎ𝑓(𝑡, 𝑥) 1 1 𝐾2 = ℎ𝑓(𝑡 + ℎ, 𝑥 + 𝐾1 ) 2 2 1 1 𝐾3 = ℎ𝑓(𝑡 + ℎ, 𝑥 + 𝐾2 ) 2 2 𝐾4 = ℎ𝑓(𝑡 + ℎ, 𝑥 + 𝐾3 ) Error of Order 𝑂(ℎ5 ) So What's next? Already Viable Numerical Solution established what's the next step? We want to control our Error and Step size at each step. These methods are called adaptive. Why? Cost Less Keep within Tolerance Also look for More efficient ways of doing these things. 10 Function Evaluation for RK4 and RK5 Just 6 for RKF4(5) Runge-Kutta Fehlberg Coefficients ∝ 𝐾 , 𝐶𝐾 , β𝐾λ , 𝐶𝐾 are found via Taylor expansions Next Step to find These Coefficients Further Deriving We assume 𝐶1 = 0, 𝐶1 = 0, ∝ 4 =1 More and more… So this was way more complicated than I actually thought it would be. But it’s all leading some where! Eventually we want to have all the 𝐶𝐾 , β𝐾λ , 𝐶𝐾 in terms of ∝ 2 and ∝ 5 . From there was must figure out our ∝ ∝ 5. ∝ 5 ends up being arbitary 2 and How to find ∝ 2 First Take coefficients from the 5th order equation. Which ultimately leads to Where we chose ∝ 2= 1/3 and ∝ 2= 3/8 ∝ 2= 1/3 ∝ 2= 3/8 Comparison(Problem) Comparisons of Methods Dormand and Prince Methods Visual Comparison of Methods Conclusion Taylor’s method uses derivatives to solve ODE RK uses only a combination of specific function evaluations instead of derivatives to approximate solution of the ODE RKF is beneficial because you can control your step size so you have your global error within a predetermined tolerance RK4 and RK5 uses 10 function evaluations vs RKF just 6 Runge-Kutta Fehlberg is widely accepted and used commercially(Matlab, Mathematica, maple, etc) Sources Numerical Mathematics and Computing. Sixth Edition; Ward Cheny, David Kincaid Low-Order classical Runge-Kutta Formulas with StepSize Control and their Application to some heat transfer problems. By Erwin Fehlberg(1969) A family of embedded Runge-Kutta Formulae. By Dormand and Prince(1980)