Parallel Axis Theorem and Torque
advertisement

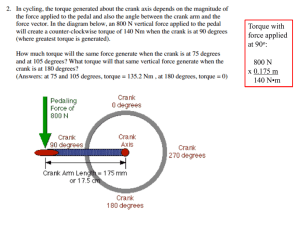
PHY205 1. Ch15: // Axis Theorem and Torque Recall main points: • Expression of the Kinetic energy of a rigid body in terms of Kcm and Icm • Parallel Axis Theorem • Torque and Cross Product • Angular acceleration from the torque Slide # 1 PHY205 Ch15: // Axis Theorem and Torque Kinetic energy of a rigid body in terms of Kcm and Icm In the 3rd slide of Ch 13 we showed that the total kinetic energy of a system is equal to the energy of the Center of Mass (CM) plus the energy RELATIVE to the CM: K 1 2 2 1. Main Points M vC M i 1 2 m i vi /C M CM 2 vCM In our case since we study RIGID bodies, any motion relative to the CM MUST be a rotation around an axis through the CM. And therefore, since : v i / C M ri / cm i w e ca n re w rite th e se co n d te rm o f th e Kin e tic e n e rgy a b o ve . W e ge t: i 1 2 m i vi / C M 2 1 1 2 2 m i ri / cm 2 2 m r 2 i i / cm 2 1 2 I CM 2 So th a t w e ca n re w rite th e to ta l kin e tic e n e rgy a s: K 1 2 M v cm 2 1 2 I CM K K CM 2 1 2 I CM 2 This is a general result that should be used when the work-energy theorem, or the conservation of mech. energy, is used for solving problems involving rigid bodies rotating . Note that any motion can be viewed as the CM motion PLUS a rotation AROUND an axis thru the CM Slide # 2 PHY205 Ch15: // Axis Theorem and Torque Optional: Direct proof of the preceding result: K /O i K /O 1. Main Points i 1 2 1 2 m i vi 2 m i vi vi N o w w e e xp re ss v i in te rm s o f th e ve lo city v i / cm re la tive to th e ce n te r o f m a ss a n d th e v e lo city v cm O F th e C M K /O i K /O i K /O i K /O 1 K /O 1 2 2 1 2 1 2 1 2 m i v cm v i / cm v cm v i / cm m i v cm v cm v i / cm v i / cm 2 v i / cm v cm m i v cm v i / cm 2 v i / cm v cm 2 m v i M v cm 2 2 2 cm 1 2 m i v i / cm 2 1 m r 2 i i / cm 2 2 2 2 m v v i d dt i / cm cm m r v i i / cm cm By definition of the center of mass (see CM chapter) the last term is zero. Note also that we replaced vi/cm by ri/cm since we are dealing with a rigid body. We obtain the fundamental result: 1 2 K / o K CM I /CM Slide # 3 2 PHY205 Ch15: // Axis Theorem and Torque Parallel Axis Theorem via K=Kcm+1/2Iw2 1. Main Points Using the result on the previous slides, we can arrive at the very useful parallel axis theorem: Slide # 4 PHY205 Ch15: // Axis Theorem and Torque Torque and Cross product: 1. Main Points The torque is defined as: /O r F Right Hand Rule: In this course we only look at rotations around a axis of fixed direction, therefore, from studying the right hand rule for a second, we see that the only components of r and F that matter are the x and y y components (see picture at right). In the problems O you are given, the forces are always in the X-Y plane and the r should always be the vector r=(x,y) and thus is the angle in the x-y plane. The magnitude of the torque around the z-axis is: / O rF sin F r m x Slide # 5 PHY205 Ch15: // Axis Theorem and Torque 1. Main Points Angular acceleration from the torque, using Newton’s 2nd law: Slide # 6