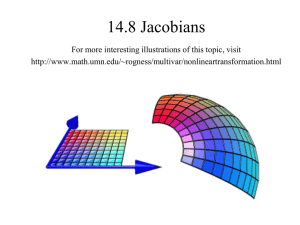
Change of Variables: Jacobians
advertisement

Change of Variables: Jacobians By Dr. Julia Arnold Courtesy of a CDPD grant If you haven’t read the text yet, you are probably wondering “What is a Jacobian”? Wikipedia: Jacobian In vector calculus, the Jacobian is shorthand for either the Jacobian matrix or its determinant, the Jacobian determinant. These concepts are all named after the mathematician Carl Gustav Jacobi. The term "Jacobian" is normally pronounced [ja’kobiən]. Born: 10 Dec 1804 in Potsdam, Prussia (now Germany) Died: 18 Feb 1851 in Berlin, Germany For more information on Jacobi: http://www-groups.dcs.st-and.ac.uk/~history/Biographies/Jacobi.html Our two objectives in this lesson are: 1. Understand the concept of a Jacobian 2. Use a Jacobian to change variables in a double integral Objective 1 Understand the concept of a Jacobian The Jacobian, which turns out to be a 2 x 2 determinant, is a natural outgrowth of the changing of variables in an integral problem. In a single integral you can change variables by letting x = g(u), dx = g’(u)du and obtain b a d f ( x ) dx g ( u ) g '( u ) du w ith a g ( c ), and b g ( d ) c It’s the double integral where we see the Jacobian. f ( x , y ) dA R f ( g ( u , v ), h ( u , v )) S x x u v y y u v dudv This is the Jacobian where ( x, y ) (u , v ) x x u v y y u v x y u v y x u v Let’s work out the Jacobian where we do the conversion of rectangular to polar coordinates. x r cos y r sin x y r x cos sin r y r sin cos r sin sin r cos r cos r cos r sin r 2 2 H ence , R f ( x , y ) dA S f ( r cos , r sin ) r dr d Objective 2 Use a Jacobian to change variables in a double integral We will start off with a simple problem just to illustrate the basic method of solving. First we need to show that we can take any defined region in the xy plane and create a transformation onto a simpler region in the uv-plane. There are many ways to do this, and what you choose may have a lot to do with the pattern of the boundaries of the region. We call this a transformation of R in the xy-plane to S in the uv-plane, or sometimes it may be called a mapping. Let’s suppose R is bounded by the lines X – 2y = 0 X – 2y = -4 X+y=4 X+y=1 This creates the parallelogram as shown in the figure. y x Let’s suppose R is bounded by the lines X – 2y = 0 X – 2y = -4 X+y=4 X+y=1 Let u = x + y and v = x – 2y Thus the new bounds would be: X – 2y = 0 v = 0 X – 2y = -4 v = -4 X+y=4 u=4 X+y=1 u=1 y This creates the rectangle as shown in the figure. x uv-plane Let’s suppose R is bounded by the lines X – 2y = 0, X – 2y = -4, X + y = 4, X + y = 1 Let u = x + y and v = x – 2y Now to find the partials we need to solve for x in terms of u and v and solve for y in terms of u and v. u x y v x 2y u v y 2y u v 3y 2u 2 x 2 y v 2u v 3 x 2u v 3 uv 3 y x 2y x u x y Solving 2u 2 x 2 y v x 2y simultaneously v u v y 2y x 2y 2u v 3 x 2u v u v 3y x 3 uv y 3 x 2u v uv , y 3 x u y u 2 3 ; x 3 v 1 y ; 3 ( x, y ) (u , v ) v 1 1 So the Jacobian for this change of variables is 3 -1/3 3 2 1 3 3 1 1 3 3 2 1 1 1 2 1 3 1 3 3 33 9 9 9 3 Since we’ve done all this work let’s make a problem using that particular R. Solve 2u v u v 1 3 xydA 3 3 3 3 dudv R S Where R is the area bounded by the lines X – 2y = 0 X – 2y = -4 X+y=4 X+y=1 S is the area in the uv plane bounded by v = 0, v = -4, u = 4 and u = 1 2u v u v 1 3 3 3 3 dudv 4 1 0 4 3 xydA R 1 9 0 4 2 u v u v dudv 1 9 4 1 4 2u 2 uv v 2 du 1 2u 3 3 0 4 2u 2 uv v 2 dudv 4 1 2 u v 2 v u 2 4 1 2 43 2 13 2 2 4 v 1 v 2 2 v 4 v 1 3 3 2 2 15 2 42 v 3 v 2 0 15 2 42 v 3 v 2 4 1 9 164 164 9 0 15 2 3 dv 42 v v v 164 4 4 Some transformations may create problems which are not difficult, just tedious because of the algebra that has to be done. At that point you may wish to use a TI89 or a math program like math cad, mathematica, or maple to simplify the problem. For comments on this presentation you may email the author Dr. Julia Arnold at jarnold@tcc.edu.