Input / Output

Input / Output
Tanenbaum Chapter 5
Silberschatz – Ch 12, 13
I/O Hardware
• Human readable
– used to communicate with the user
– video display terminals
– keyboard, mouse
– printer
• Machine readable
– used to communicate with electronic equipment
– disk drives, tape drives, modems
– serial, parallel, network ports
– controllers cs431-cotter 2
Differences Among I/O Devices
• Data Transfer Rate
• Application
– disk used to store files / disk used to store virtual memory pages
• Complexity of control
• Unit of transfer
• Data representation (encoding schemes)
• Error conditions (devices respond to errors differently) cs431-cotter 3
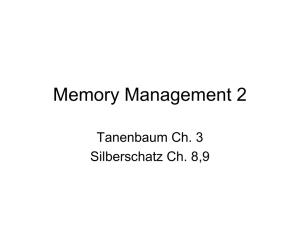
I/O Devices
Figure 5-1. Some typical device, network, and bus data rates.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
4
I/O Hardware Concepts
• Bus (shared direct access or daisy chain) cs431-cotter monitor graphics controller
CPU bridge controller cache memory scsi controller
IDE disk controller
PCI Bus expansion bus keyboard serial port
5
I/O Hardware Concepts
• Bus (shared direct access or daisy chain)
• Port monitor graphics controller
CPU bridge controller cache memory scsi controller
IDE disk controller
PCI Bus expansion bus keyboard serial port cs431-cotter 6
I/O Hardware Concepts
• Bus (shared direct access or daisy chain)
• Port
• Controller
CPU monitor cache graphics controller bridge controller memory scsi controller
IDE disk controller
PCI Bus expansion bus keyboard serial port cs431-cotter 7
Application I/O Interface
• Objective of the I/O system is to encapsulate individual device behaviors in generic classes.
• The device driver layer hides the differences among I/O controllers from the kernel
• Devices vary in many dimensions
– Character-stream vs Block devices
– Sequential vs Random-access location
– Synchronous vs Asynchronous data transfer
– Sharable vs Dedicated I/O device
– Read, Write, or Read/Write cs431-cotter 8
cs431-cotter
Kernel I/O Structure
Device Drivers kernel
Kernel I/O Subsystem
SCSI device driver keyboard device driver mouse device driver
SCSI device contrlr keyboard device contrlr mouse device contrlr
. . .
. . .
PCI bus device driver floppy device driver
ATAPI device driver
PCI bus device contrlr floppy device contrlr
ATAPI device contrlr
SCSI device keyboard mouse
. . .
PCI bus floppy drive
ATAPI devices
9
Software I/O Techniques
• Polling (programmed I/O)
– send command and wait
• Interrupt Driven I/O
– send command and continue
• Direct Memory Access (DMA)
– Use separate processor to manage I/O cs431-cotter 10
Polling
• CPU determines state of I/O device
– Status register
• To send data to I/O device:
– Host reads busy bit until clear.
– Host sets write bit and sends data to data-out register
– Host sets command-ready bit
– Controller sets busy bit
– Controller reads command register and sees write command
– Controller reads data in data-out register and clears command-ready, error, and busy when complete cs431-cotter 11
Programmed I/O (1)
Figure 5-7. Steps in printing a string.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
12
Programmed I/O (2)
Figure 5-8. Writing a string to the printer using programmed I/O.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
13
Interrupt Driven I/O
• Interrupts are handled through an interrupt controller
• Types of interrupts
– nonmaskable - invalid address, divide by zero, etc
– maskable - device controllers
• Identification of interrupts
– Interrupt vector: Addresses of each interrupt handling routine.
– Interrupt priority implicit in vector cs431-cotter 14
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
15
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
16
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
17
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
18
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
19
Interrupt Driven I/O device driver initiates I/O initiates I/O when complete, generates int.
cs431-cotter
Receives Int., transfers to Int handler
Int. handler processes data resume processing of interrupted task
CPU
I/O Controller
20
Interrupt Handlers (1)
1. Save registers not already been saved by interrupt hardware.
2. Set up a context for the interrupt service procedure.
3. Set up a stack for the interrupt service procedure.
4. Acknowledge the interrupt controller. If there is no centralized interrupt controller, reenable interrupts.
5. Copy the registers from where they were saved to the process table.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
21
Interrupt Handlers (2)
6. Run the interrupt service procedure.
7. Choose which process to run next.
8. Set up the MMU context for the process to run next.
9. Load the new process’ registers, including its
PSW.
10. Start running the new process.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
22
Direct Memory Access
• Takes control of the system from the CPU to transfer data to and from memory over the system bus
• Cycle stealing is used to transfer data on the system bus
• The instruction cycle is suspended so data can be transferred
• The CPU pauses one bus cycle
• No interrupts occur
– No need to save context cs431-cotter 23
DMA Transfer Process
Device driver gets command to transfer data (C bytes) from disk to memory buffer (address X) processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port cs431-cotter 24
DMA System Architecture
Device driver instructs disk controller to transfer data from disk to buffer in memory processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port cs431-cotter 25
DMA System Architecture
Disk controller initiates DMA transfer cs431-cotter processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port
26
DMA System Architecture
Disk controller sends each byte to DMA controller cs431-cotter processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port
27
DMA System Architecture
DMA controller transfers data to memory, adjusting addresses and sizes accordingly processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port cs431-cotter 28
DMA System Architecture
When C = 0, DMA interrupts to signal completion of DMA transfer processor monitor graphics controller
DMA memory
IDE disk controller disk disk
PCI Bus expansion bus scsi controller keyboard serial port cs431-cotter 29
cs431-cotter
Typical DMA Block Diagram
The processor identifies whether a read or write is requested, and loads starting memory address, byte count, I/O address
Data Lines
Address Lines
DMA Request
DMA Acknowledge
Interrupt
Read
Write
Data
Count
Data
Register
Address
Register
Control
Logic
30
cs431-cotter
Typical DMA Block Diagram
I/O device initiates DMA Request. DMA controller seizes memory bus, returns ACK. I/O sends data thru DMA
Data Lines
Address Lines
DMA Request
DMA Acknowledge
Interrupt
Read
Write
Data
Count
Data
Register
Address
Register
Control
Logic
31
Typical DMA Block Diagram
When data transfer is complete, DMA signals with interrupt cs431-cotter
Data Lines
Address Lines
DMA Request
DMA Acknowledge
Interrupt
Read
Write
Data
Count
Data
Register
Address
Register
Control
Logic
32
DMA Transfer Process
• Device driver gets command to transfer data (C bytes) from disk to memory buffer (address X)
• Device driver instructs disk controller to transfer data from disk to buffer in memory
• Disk controller initiates DMA transfer
• Disk controller sends each byte to DMA controller
• DMA controller transfers data to memory, adjusting addresses and sizes accordingly
• When C = 0, DMA interrupts to signal completion of DMA transfer cs431-cotter 33
cs431-cotter
DMA / Interrupt Breakpoints
Processor
Cycle
Time
Instruction Cycle
Processor
Cycle
Processor
Cycle
Processor
Cycle
Processor Processor
Cycle Cycle
Fetch
Instruction
Decode
Instruction
Fetch
Operand
Execute
Instruction
Store
Result
Process
Interrupt
DMA
Breakpoints
Interrupt
Breakpoint
34
cs431-cotter
DMA / Interrupt Breakpoints
Processor
Cycle
Time
Instruction Cycle
Processor
Cycle
Processor
Cycle
Processor
Cycle
Processor Processor
Cycle Cycle
Fetch
Instruction
Decode
Instruction
Fetch
Operand
Execute
Instruction
Store
Result
Process
Interrupt
DMA
Breakpoints
Interrupt
Breakpoint
35
Precise and Imprecise Interrupts
Properties of a precise interrupt
1. PC (Program Counter) is saved in a known place.
2. All instructions before the one pointed to by the PC have fully executed.
3. No instruction beyond the one pointed to by the PC has been executed.
4. Execution state of the instruction pointed to by the PC is known.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
36
Factors affecting Interrupt state
• Pipeline CPU architecture
• Superscalar CPU architecture
• May leave some instructions partially executed
• Does not guarantee “first-come first-served”
• May require extensive state capture
• May require complex logic to capture precise state cs431-cotter 37
Precise and Imprecise Interrupts (2)
Figure 5-6. (a) A precise interrupt. (b) An imprecise interrupt.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
38
I/O Efficiency Improvement
• Reduce # of context switches
• Reduce # of data copies in memory as data passes from device to application
• Reduce # of interrupts
– larger data transfers
– smart controllers
– polling (?)
• Use DMA (increase processing concurrency)
• Balance performance of CPU, memory, bus,
I/O cs431-cotter 39
User-Space I/O Software
Figure 5-17. Layers of the I/O system and the main functions of each layer.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
40
Secondary Storage
• Basic structure
• SSDs
• Scheduling Algorithms
• Reliability cs431-cotter 41
Disk Structure
• Addressed as a large, 1 dimensional array of logical blocks (clusters).
• Blocks are mapped onto disk sectors
– Mapping starts with track 0, head 0, sector 0.
– Continues through sectors on the same track and head
– Moves to all heads on the same cylinder
– Moves to all cylinders in the drive cs431-cotter 42
cs431-cotter
Disk Mechanism
43
Magnetic Disks (1)
Figure 5-18. Disk parameters for the original IBM PC 360-KB floppy disk and a Western Digital WD 18300 hard disk.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
44
Magnetic Disks (2)
Figure 5-19. (a) Physical geometry of a disk with two zones.
(b) A possible virtual geometry for this disk.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
45
CD-ROMs
Figure 5-21.
Recording structure of a compact disc or CD-ROM.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
46
CD-ROMs (2)
Figure 5-22. Logical data layout on a CD-ROM.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
47
CD-Recordables
Figure 5-23. Cross section of a CD-R disk and laser. A silver
CD-ROM has similar structure, except without dye layer and with pitted aluminum layer instead of gold layer.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
48
DVD (1)
DVD Improvements on CDs
1. Smaller pits
(0.4 microns versus 0.8 microns for CDs).
2. A tighter spiral
(0.74 microns between tracks versus 1.6 microns for CDs).
3. A red laser
(at 0.65 microns versus 0.78 microns for CDs).
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
49
DVD (2)
DVD Formats
1. Single-sided, single-layer (4.7 GB).
2. Single-sided, dual-layer (8.5 GB).
3. Double-sided, single-layer (9.4 GB).
4. Double-sided, dual-layer (17 GB).
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
50
DVD (3)
Figure 5-24. A double-sided, dual-layer DVD disk.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
51
Solid State Devices
History
• ROM – Read Only Memory - ?
• PROM – Programmable Read Only Memory -
1956
• EPROM – Eraseable Programmable ROM - 1972
• EEPROM – Electrically Eraseable PROM – 1978 cs431-cotter 52
Early SSD Issues
• Relatively Low Capacity
• Very Slow ”Erase” times
• High cost per bit.
cs431-cotter 53
Flash Memory
• Developed ~1980
• Memory cells organized into Blocks
– Erase at block level
• Based on Floating-gate Transistors
– Stores a charge between insulating layers
– Can retain a charge “for many years” cs431-cotter 54
cs431-cotter
Floating-Gate Transistor
55
Floating-Gate Transistor
• Multiple voltages needed to read / write / erase
– Typically generated with circuitry on device
– Device typically requires standard PC voltages.
• Two types available
– Single Level Cell (SLC) only detects presence or absence of current
– Multi-level Cell (MLC) detects current level, allowing storage of multiple bits per cell cs431-cotter 56
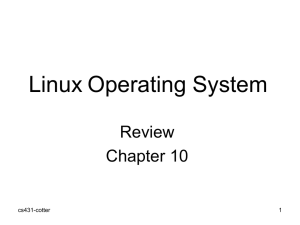
SSD Organization
• Objective is to provide a structure that will improve performance (write / erase)
• Stored in pages / blocks / planes
– Typical page sizes: 512 / 2048 / 4096 bytes
– Typical block sizes: 32 / 64 / 128 pages
– Typical plane sizes: 1024 / 2048 / ???
– 4096 * 128 * 2048 = 1 GB
• Memory chips may have multiple dies.
• Devices may have multiple chips. cs431-cotter 57
Read
Erase
Write cs431-cotter
SSD Performance
Speed
SLC MLC
25 μs
2 ms per block
250 μs
50 μs
2 ms per block
900 μs
58
SSD Performance
Endurance
• Bit level reliability
– SLC - ~100,000 program / erase cycles
– MLC - ~5,000 to 10,000 program / erase cycles
• Robust ECC
– Correct single bit errors
• Over-provision
– Mark bad memory and move data to good blocks
• Wear leveling
– Write data evenly across storage space cs431-cotter 59
SSD Products
• Current –
– OCZ Technology
• PCIe – Z-drives 256GB ($1300), 512 GB, 1TB
• 2.5” / 3.5” SATA – 250GB, 500GB, 1TB ($3900)
– Western Digital
• 2.5” SATA – 256GB ($800)
– Corsair , Kingston, Patriot, etc.
• Future
– ?
cs431-cotter 60
Hard Disk Formatting (1)
Figure 5-25. A disk sector.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
61
Disk Format
Figure 5-26. An illustration of cylinder skew.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
62
Disk Formatting (3)
Figure 5-27. (a) No interleaving. (b) Single interleaving.
(c) Double interleaving.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
63
Disk Scheduling
• To read or write, the disk head must be positioned at the desired track and at the beginning of the desired sector cs431-cotter 64
Disk Scheduling
• To read or write, the disk head must be positioned at the desired track and at the beginning of the desired sector
• Seek time
– time it takes to position the head at the desired track
• Rotational delay or rotational latency
– time its takes until desired sector is rotated to line up with the head cs431-cotter 65
Disk Scheduling
• Access time
– sum of seek time and rotational delay
– the time it takes to get in position to read or write
• Data transfer occurs as the sector moves under the head
• Data transfer for an entire file is faster when the file is stored in the same cylinder and in adjacent sectors cs431-cotter 66
Disk Scheduling
• Seek time is a reason for differences in performance (try to minimize)
• For a single disk there will be a number of
I/O requests
• If requests are selected randomly, we will get the worst possible performance cs431-cotter 67
Disk Scheduling - Objective
• Objective is to maximize disk bandwidth
– minimize “wasted” time
– seek time dominates cs431-cotter 68
Disk Scheduling - Objective
• Objective is to maximize disk bandwidth
– minimize “wasted” time
– seek time dominates
• Common example:
– disk head starts on track 53 (range 0 - 199)
– list of pending requests
98, 183, 37, 122, 14, 124, 65, 67 cs431-cotter 69
Disk Scheduling - FCFS
• First-come, first-served (FCFS)
– Process request sequentially
– Fair to all processes
– Approaches random scheduling in performance if there are many processes
– Avoids starvation
• Example head movement: 640 cylinders track
53 - 98 - 183 - 37 - 122 - 14 - 124 - 65 - 67
45 + 85 + 146 + 85 + 108 + 110 + 59 + 2 = 640 cs431-cotter 70
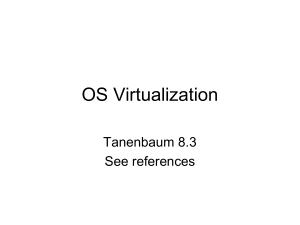
Disk Scheduling - SSTF
• Shortest Service Time First
– select the disk I/O request that requires the least movement of the disk arm from its current position
– always choose the minimum Seek time
• Example head movement: 236 cylinders
– 53 - 65 - 67 - 37 - 14 - 98 - 122 - 124 - 183 cs431-cotter 71
Disk Arm Scheduling Algorithms (2)
Figure 5-28. Shortest Seek First (SSF) disk scheduling algorithm.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
72
Disk Scheduling - SCAN
• SCAN
– arm moves in one direction only, satisfying all outstanding requests until it reaches the last track in that direction
– direction is reversed
– (also known as elevator algorithm)
• Example head movement: 236 cylinders
– 53 - 37 - 14 - 0 - 65 - 67 - 98 - 122 - 124 - 183 cs431-cotter 73
Disk Arm Scheduling Algorithms (3)
Figure 5-29. The elevator algorithm for scheduling disk requests.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
74
Disk Scheduling - C-SCAN
• C-SCAN
– Provides a more uniform wait time than SCAN
– Restricts scanning to one direction only
– When the last track has been visited in one direction, the arm is returned to the opposite end of the disk and the scan begins again
– Treats the cylinders as a circular list that wraps around from the last cylinder to the first one.
• Example head movement: 383 cylinders
53 - 65 - 67 - 98 - 122 - 124 - 183 - 199 - 0 - 14 - 37 cs431-cotter 75
Disk Scheduling - C-LOOK
• C-LOOK
– version of C-SCAN
– Difference is that head arm only goes as far as the last request in each direction. It doesn’t go to the beginning or end of the disk automatically.
• Example head movement: 322 cylinders
53 - 65 - 67 - 98 - 122 - 124 - 183 - 14 - 37 cs431-cotter 76
Disk Scheduling - Other Algorithms
• Other Algorithms
– Priority
• goal is not to optimize disk use but to meet other objectives
• short batch jobs may have higher priority
• provide good interactive response time
– Last-in, first-out
• good for transaction processing systems
– the device is given to the most recent user so there should be little arm movement
• possibility of starvation since a job may never regain the head of the line cs431-cotter 77
Selecting a Disk Schedule
• Performance depends on number and type of requests
• SSTF is common cs431-cotter 78
Selecting a Disk Schedule
• Performance depends on number and type of requests
• SSTF is common
• SCAN, C-SCAN perform better under heavy load cs431-cotter 79
Selecting a Disk Schedule
• Performance depends on number and type of requests
• SSTF is common
• SCAN, C-SCAN perform better under heavy load
• Modular system design facilitates replacement cs431-cotter 80
Error Handling
Figure 5-30. (a) A disk track with a bad sector.
(b) Substituting a spare for the bad sector.
(c) Shifting all the sectors to bypass the bad one.
cs431-cotter
Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-136006639
81
Disk Reliability
• Protection for data provided through cooperative operation of multiple disks
• Multiple copies on multiple disks cs431-cotter 82
Disk Reliability
• Protection for data provided through cooperative operation of multiple disks
• Multiple copies on multiple disks
• Multiple interface cards
• Copies on multiple systems
• Tape backups cs431-cotter 83
RAID
• Redundant Array of Independent Disks
• Designed to provide improved performance
/ data reliability within a single system using multiple disks
• Multiple versions available (0 - 6) cs431-cotter 84
RAID 0
• Intended to support improved data transfer performance through “striping”
• No data redundancy provided…
• I/O performance vs. data transfer performance strip 0 strip 4 strip 8 strip 12 strip 1 strip 5 strip 9 strip 13 strip 2 strip 6 strip 10 strip 14 strip 3 strip 7 strip 11 strip 15 cs431-cotter 85
RAID 1
• Intended to provide a simple mechanism to improve data reliability using “mirroring”
• Uses 2 (sets of) disks to make identical copies of the data. Writes must be done to both sets, but reads can be done by either (synchronize disks) strip 0 strip 4 strip 8 strip 12 strip 1 strip 5 strip 9 strip 13 strip 2 strip 6 strip 10 strip 14 strip 3 strip 7 strip 11 strip 15 strip 0 strip 4 strip 8 strip 12 strip 1 strip 5 strip 9 strip 13 strip 2 strip 6 strip 10 strip 14 strip 3 strip 7 strip 11 strip 15 cs431-cotter 86
RAID 2
• Data redundancy provided using Hamming code
• Disks accessed in parallel
– Excellent performance for Data transfer, poor for I/O
• Error correction possible b
0 b
1 b
2 b
2 f
0
(b) f
1
(b) f
2
(b) cs431-cotter 87
RAID 3
• Data redundancy provided using Bit-interleaved Parity
• Disks accessed in parallel (disks synchronized)
– Excellent performance for Data transfer, poor for I/O
• Error correction still possible cs431-cotter b
0 b
1 b
2 b
2
P(b)
88
RAID 4
• Data redundancy provided using Block-level Parity
• Disks accessed independently
– Excellent performance for I/O, fair for data transfer cs431-cotter block 0 block 4 block 8 block 12 block 1 block 5 block 9 block 13 block 2 block 6 block 10 block 14 block 3 block 7 block 11 block 15
P(0-3)
P(4-7)
P(8-11)
P(12-15)
89
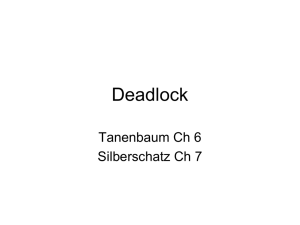
RAID 5
• Data redundancy provided using Block-level Parity
(distributed across disks)
• Disks accessed independently
– Excellent performance for I/O, fair for data transfer block 0 block 4 block 8 block 12
P(16-19) block 1 block 5 block 9
P(12-15) block 16 block 2 block 6
P(8-11) block 13 block 17 block 3
P(4-7) block 10 block 14 block 18
P(0-3) block 7 block 11 block 15 block 19 cs431-cotter 90
RAID 6
• P + Q Redundancy
– Uses error correcting codes (e.g. Reed-Solomon) instead of parity. Requires multiple redundant blocks for each “stripe” of data
– Can support multiple disk failures.
block 0
P2 block 8 block 12
P1 block 1 block 5 block 9
P1 block 16 block 2 block 6
P1 block 13 block 17 block 3
P1 block 10
P2 block 18
P2 block 7
P2 block 15 block 19
P2 block 4 block 11 block 14
P2 cs431-cotter 91
RAID 0+1, 1+0
• RAID 0 + 1
– Stripe Disks (RAID 0), then mirror disk set (RAID 1)
– Better performance than RAID 5, but doubles the number of disks needed
– If 1 disk fails, that mirror is unavailable
• RAID 1 + 0
– Mirror Disks (RAID 1), then stripe the pairs (RAID 0)
– Similar performance to RAID 0 + 1
– Better reliability. If 1 disk fails, remaining pairs are all still active.
cs431-cotter 92
Summary
• Input / Output Hardware
– DMA, Interrupts, CPU design
• I/O Software
– I/O techniques, device drivers, buffering
• Disks
– Basic structure, Scheduling Algorithms, Reliability cs431-cotter 93
References
• Anatomy of SSDs – www.linuxmag.com/id/7590/1/
• Storage networking Industry Association – SNIA
– Solid State Storage Initiative (SSSI) www.snia.org/forums/sssi cs431-cotter 94
Questions
• How does DMA improve the performance of common disk operations (reading and writing)?
• In terms of I/O operations, what is the difference between temporary and permanent failures? Provide an example of each.
• On hard disks, the length of the inner track is perhaps 2/3 of the outer track. How do modern disks deal with the difference in the amount of space available to write data?
• On optical storage (CDROM, DVD, etc.) how have manufacturers been able to increase the capacity of the disks?
• In disk scheduling, what is the difference between the SCAN algorithm and C_SCAN?
• Which RAID configuration (s) provide a complete duplicate of all of the data?
cs431-cotter 95