The_Wumpus_World
advertisement

The Wumpus World!
2012级ACM班
金汶功
Hunt the wumpus!
Description
•
•
•
•
Performance measure
Environment
Actuators
Sensors: Stench & Breeze & Glitter & Bump &
Scream
An Example
An Example
Reasoning via logic
Semantics
• Semantics: Relationship between logic and the
real world
• Model: 𝑀(α)
• Entailment: 𝛼 ⊨ β iff M(𝛼) ⊆ 𝑀(𝛽)
Models
• KB: valid sentences
• 𝛼1 : “There is no pit in [1,2]”
• 𝛼2 : “There is no pit in [2,2]”
Sensors
Tell
Axioms
Current
States
Knowledge base
Ask
Answer
Tell
Model
checking
Actuators
Agent
Efficient Model Checking
•
•
•
•
•
•
DPLL
Early termination
Pure symbol heuristic
Unit clause heuristic
Component analysis
…
Drawbacks
• Model checking is NP-complete
• Knowledge base may tell nothing.
Probabilistic Reasoning
Full joint probability distribution
• P(X, Y) = P(X|Y)P(Y)
• X: {1,2,3,4} -> {0.1,0.2,0.3,0.4}
• Y: {a,b} -> {0.4, 0.6}
• P(X = 2, Y = a) = P(X = 2|Y = a)P(Y = a)
• The probability of all combination of values
Normalization
• 𝑃 𝑐𝑎𝑣𝑖𝑡𝑦 𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒) =
𝑃(𝑐𝑎𝑣𝑖𝑡𝑦∧𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒)
𝑃(𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒)
• 𝑃(𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒) is a constant
• 𝑃 𝑐𝑎𝑣𝑖𝑡𝑦 𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒) = α 𝑃(𝑐𝑎𝑣𝑖𝑡𝑦 ∧
𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒)
• 𝐏 𝑐𝑎𝑣𝑖𝑡𝑦 𝑡𝑜𝑜𝑡ℎ𝑎𝑐ℎ𝑒) = 𝛼 < 0.12,0.08 >
• =< 0.6,0.4 >
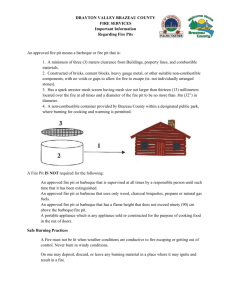
The Wumpus World
• Aim: calculate the probability that each of the
three squares contains a pit.
Full joint distribution
• P(𝑃1,1 , ⋯ 𝑃4,4 , 𝐵1,1 , 𝐵1,2 , 𝐵2,1 ) = P(𝐵1,1 , 𝐵1,2 ,
𝐵2,1 |𝑃1,1 , ⋯ 𝑃4,4 ) P(𝑃1,1 , ⋯ 𝑃4,4 )
• P(𝑃1,1 , ⋯ 𝑃4,4 ) =
𝑖,𝑗 P(𝑃𝑖,𝑗 )
• Every room contains a pit of probability 0.2
• 𝑃 𝑃1,1 , ⋯ 𝑃4,4 = 0.2𝑛 × 0.816−𝑛
How likely is it that [1,3] has a pit?
• Given observation:
• 𝑏 = ¬𝑏1,1 ∧ 𝑏1,2 ∧ 𝑏2,1
• 𝑘𝑛𝑜𝑤𝑛 = ¬𝑝1,1 ∧ ¬𝑝1,2 ∧ ¬𝑝2,1
• 𝐏 𝑃1,3 𝑘𝑛𝑜𝑤𝑛, 𝑏 = 𝛼
• 212 = 4096 terms
𝑢𝑛𝑘𝑛𝑜𝑤𝑛 𝐏(𝑃1,3 , 𝑢𝑛𝑘𝑛𝑜𝑤𝑛, 𝑘𝑛𝑜𝑤𝑛, 𝑏)
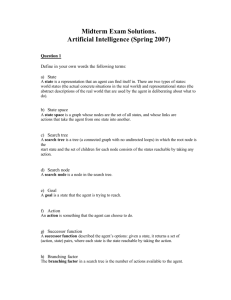
Using independence
Simplification
• 𝐏 𝑃1,3 𝑘𝑛𝑜𝑤𝑛, 𝑏 = 𝛼
• =𝛼
• =𝛼
𝑢𝑛𝑘𝑛𝑜𝑤𝑛 𝐏(𝑃1,3 , 𝑘𝑛𝑜𝑤𝑛, 𝑏, 𝑢𝑛𝑘𝑛𝑜𝑤𝑛)
𝑢𝑛𝑘𝑛𝑜𝑤𝑛 𝐏(𝑏|𝑃1,3 , 𝑘𝑛𝑜𝑤𝑛, 𝑢𝑛𝑘𝑛𝑜𝑤𝑛)𝐏(𝑃1,3 , 𝑘𝑛𝑜𝑤𝑛, 𝑢𝑛𝑘𝑛𝑜𝑤𝑛)
𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟
𝐏(𝑏|𝑃1,3 , 𝑘𝑛𝑜𝑤𝑛, 𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟, 𝑜𝑡ℎ𝑒𝑟)
𝑜𝑡ℎ𝑒𝑟 𝐏(𝑃 , 𝑘𝑛𝑜𝑤𝑛, 𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟, 𝑜𝑡ℎ𝑒𝑟)
1,3
• =⋯
• = 𝛼𝑃 𝑘𝑛𝑜𝑤𝑛 𝐏(𝑃1,3 )
𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟 𝐏(𝑏|𝑃1,3 , 𝑘𝑛𝑜𝑤𝑛, 𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟)𝑃(𝑓𝑟𝑜𝑛𝑡𝑖𝑒𝑟)
• Now there are only 4 terms, cheers!
Finally
• 𝐏 𝑃1,3 𝑘𝑛𝑜𝑤𝑛, 𝑏 =< 0.31, 0.69 >
• [2,2] contains a pit with 86% probability!
• Data structures---independence
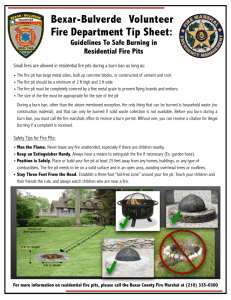
Bayesian Network
Simple Example
P(B)
Burglary
P(E)
Earthquake
.001
Alarm(Bark)
John Calls
Bark
P(J)
true
.90
false
.05
.002
B
E
P(A)
True
true
.95
true
false
.94
false
true
.29
false
false
.001
Mary Calls
Bark
P(M)
true
.70
false
.01
Specification
• Each node corresponds to a random variable
• Acyclic – DAG
• Each node has a conditional probability
distribution 𝐏 𝑋𝑖 𝑃𝑎𝑟𝑒𝑛𝑡𝑠(𝑋𝑖 )
Conditional Independence
Exact Inference
• 𝑃 𝑏 𝑗, 𝑚 = α𝑃 𝑏, 𝑗, 𝑚
• = α 𝑒 𝑎 𝑃(𝑏, 𝑗, 𝑚, 𝑒, 𝑎)
• = α 𝑒 𝑎 𝑃 𝑏 𝑃 𝑒 𝑃 𝑎 𝑏, 𝑒 𝑃 𝑗 𝑎 𝑃(𝑚|𝑎)
• 𝐏(𝐵|𝑗, 𝑚) =< 0.284,0.716 >
P(P2,2)
0.2
P1,3
P2,2
P(P3,1)
P3,1
0.2
P(known)
P(1,3)
known
0.2
b
P1,3
P2,2
P3,1
b
True
True
True
1
True
True
False
1
True
False
True
1
True
False
False
0
False
True
True
1
False
True
False
1
False
False
True
0
False
False
False
0
Approximate Inference
• Markov Chain Monte Carlo
• Gibbs Sampling
• Idea: The long-run fraction of time spent in
each state is exactly proportional to its
posterior probability.
𝑃(𝑥𝑖 ′ |𝑀𝑎𝑟𝑘𝑜𝑣𝐵𝑙𝑎𝑛𝑘𝑒𝑡 𝑋𝑖 ) = αP(𝑥𝑖′ |𝑃𝑎𝑟𝑒𝑛𝑡𝑠 𝑋𝑖 ) ×
𝑃(𝑦𝑗 |𝑝𝑎𝑟𝑒𝑛𝑡𝑠(𝑌𝑗 ))
𝑌𝑗 ∈𝐶ℎ𝑖𝑙𝑑𝑟𝑒𝑛 𝑋𝑖
Reference
• http://zh.wikipedia.org/wiki/Hunt_the_Wumpus
• http://zh.wikipedia.org/wiki/%E8%B4%9D%E5%8F%B6%E6%9
6%AF%E7%BD%91%E7%BB%9C
• Stuart Russell, Peter Norvig Artificial Intelligence—A Modern
Approach 3rd edition, 2010