Architecture
advertisement

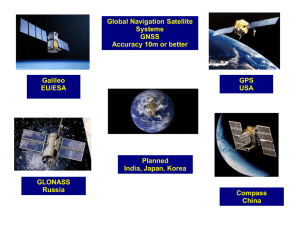
TAXISAT PROJECT Low Cost GNSS and Computer Vision based data fusion solution for driverless vehicles Marc POLLINA pollina@m3systems.net 11 Outline • • • • • Importance of ITS In-vehicle systems: Future Technologies System Architecture Results Analysis Conclusions 22 Importance of ITS • The Global Market for ITS Technologies is estimated to grow to €50BN by 2020. • Automotive Industry is one of the most innovative sectors – Active: Continuously monitor an aspect of the user, vehicle, environment or transport network and alert the user to potential danger, or intervene with the driving task to avoid danger – Passive: These are crash mitigation or minimisation technologies that act to enhance the safety of the driver or other road users by minimising the severity. – Combined active and passive systems (CAPS): These systems monitor the environment, vehicle or driver for potential danger and then apply passive safety measures if a crash is deemed unavoidable 33 GNSS Sensor in Urban Area Example of test case ( GUIDE Laboratory – Toulouse) Blue : GNSS , Green : reference ( PPK + high grade IMU) 44 GNSS Sensor in Urban Area Example of test case ( GUIDE Laboratory – Toulouse) Blue : GNSS , Green : reference ( PPK + high grade IMU) 55 Future Technologies • Sensor Fusion is essential : no sole positioning sensor covers all requirements and constraints • Combination of computer vision, 3D Maps and GNSS technologies are fostering new solutions not only for driving assistance but for unmanned vehicles 66 Future Technologies • GNSS : new constellations & new frequencies New GNSS satellite constellations, signals, and associated frequency diversity is stimulating innovations in user equipment design leading to improved capabilities of positioning • 3D Maps : city mapping 3D city mapping has the potential to revolutionize positioning in challenging urban areas. Adding height information to street maps can be used to aid GNSS positioning for land vehicle and pedestrian navigation. • GNSS Computer vision: intelligent camera The major new navigation sensor of the next decade could well be the camera. Visual odometry, is a form of dead reckoning 77 3D maps Position Computer Vision Others … Architecture 88 Architecture Traditional Sensors Cost/Accuracy Trade off Odometers for: - Wheels speed - Front Axle orientation Gyro: - Optical - MEMS 99 Architecture Position Sensors Cost/Accuracy Trade off Trimble bullet III: compact antenna - Low cost and good gain LEA-6T : GPS/EGNOS receiver - Accurate, reliable 1010 Architecture Computer Vision Cost/Accuracy Trade off FLEA 3, Point grey, stereo pair SLAM Enhancing performance level compared to usual INS Transversal displacements and estimations of velocity and orientation Matching between a live map of the scene structure and a new acquired image FOLLOW THE LANE Improve security, reliability and 24/7 operation possibility Extra feature derived from ADAS to assist continuously the car’s control loops 1111 Architecture EDAS Connection Module Local server - Hosting the EDAS client software (EDAS server connection software) - Filtering routine 3G communication - Communication between the local server and the vehicle 1212 Architecture • Tight Hybridization module composed of • An Inertial Navigation System (INS) which integrates the gyrometer/odometer data (100Hz) • A Navigation filter which updates and corrects the INS according to the measurements from the Vision or GNSS modules when available and valid • 3 platforms -> Time synchronisation of measurement required 1313 Real Time Scenario GeoPositioning No GeoReferenced information A-priori Unknown scenario Information Ratio Real World Real Distance / Location (lat,lon) Mapping of real world information to 2D image Camera/Vehicle position and Orientation in Real Time Captured image . Captured image Measured Information: - GNSS Position Device - Orientation by Sensors . Information in pixels (x3,y3) - (lat3,lon3) (x4,y4) - (lat4,lon4) Known relation Depth Information - Future GIS Hibridization Capabilities Precise Map Building Usable information for control loops: predictive (x1,y1) - (lat1,lon1) (x2,y2) - (lat2,lon2) Measured Reference (x0,y0) - (lat0,lon0) 1414 Vision Sensor: FtL results Follow the Lane • Tx: (lateral) translation in x • Vx: linear velocity in x • Wx: width of the lane • dWx: linear velocity of the change of width • Self Assesment • Active Control of Light Conditions 1515 Vision Sensor: SLAM SLAM (Simultaneous Location & Mapping ) : Visual odometry + Mapping • • Visual odometry: Estimation of the EgoMotion (6D camera/vehicle pose) in real time Real time 3D scene map generation 1616 Evaluation FtL Evaluation • Recorded video sequences: 337 minutes SLAM Module - 2 step evaluation • • Laboratory computer using the KITTI odometry evaluation dataset with ground truth – 22 sequences of images recorded with a stereo pair of cameras embedded in a car. Evaluation in San Sebastian – Running predifined paths 1717 Evaluation Accuracy and precision of the odometry • • • Translation error max 0.29% rotational error 0.0122 deg/m Runtime 9.0 ms 1818 Conclusions – Computer Vision as one key sensor for enabling autonomous driving – Enable autonomous or semi-autonomous driving of your vehicle even in situations when GNSS Signal is unreliable or not available at all (i.e. indoors, in tunnels, under dense vegetation, etc.). – Know the position of your vehicle even when no GNSS reception is available. – Improve position precision and reliability considerably when compared to GNSS-only solutions – Improve availability compared to GNSS solutions. SLAM is possible 24/7 while GNSS reception might be unreliable or not available at all for several minutes – Create a map in Real Time and Geo-locate all the point of an image in Real Time 1919 THANK YOU! Marc POLLINA pollina@m3systems.net 2020