PowerPoint ******
advertisement

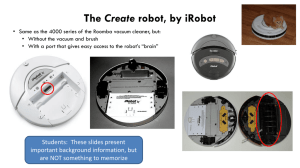
Control Design to Achieve Dynamic Walking on a Bipedal Robot with Compliance Young-Pil Jeon Contents 1. Introduction 2. Robot Model 3. Control Algorithm 4. Experiments 5. Conclusions Introduction 1. Paper Introduction (Control Design to Achieve Dynamic Walking on a Bipedal Robot with Compliance) 2. ZMP (Zero Movement Point) Paper Introduction main issue in the paper One of main issues in biped mobility is uneven terrain locomotion. Approach 1. The ZMP based walking 2. dynamic(limit cycle) walking Contribution Main contrition is a development of an adaptive control for generating dynamic locomotion under external disturbances What is ZMP • ZMP is point that is become zero to sum moment (gravity, inertia) Fig1. description about ZMP ZMP • ZMP based walkers have the following common features • 1. the stiff joints are position-controlled with high gain • 2. ZMP criterion is used to guarantee biped walkers not falling over • 3. 3D target trajectories in the task space are first planned under ZMP constraints and then solved the “inverse problem” for joint command Dynamic walking • Dynamic walking has the following features. • 1. the compliant joints are torque/force-controlled • 2. stable waling is achieved by finding attractive stable orbits called limit cycles. Robot Model 1. A biped Robot with Compliant Actuators 2. Dynamic Model of biped robot A Biped Robot with Compliant Actuators • The robot composed of 32 joints(except fingers with 40 joint) • The robot itself is 1.5 meters tall and has a mass of about 62kg Fig2. A hardware prototype and a kinematic model of robot A Biped Robot with Compliant Actuators • Each leg has six joints • Three pitch joints(hip, knee, and ankle pitch) are actuated by cable-driven modules • The other three joints(hip roll/yaw, ankle roll) are actuated by harmonic drive modules What is harmonic drive • Harmonic drive is gear drive which is better size, weight than general gear drive • The one is composed of circular spline, wave generator and flexspline Fig3. harmonic drive Fig4. composition of harmonic A Biped Robot with Compliant Actuators • On the other hand, arm joints are actuated by gear driven modules • Lower body is actuated by joint torque controllers using 12 torque sensors • Upper body is actuated by position controllers A Dynamic Model of the robot • On the other hand, arm joints are actuated by gear driven modules • Lower body is actuated by joint torque controllers using 12 torque sensors • Upper body is actuated by position controllers Control Algorithm 1. Gait Sequence Synthesis using Walking Motion States 2. Parameterized State Machine and Target Trajectory Generation 3. Adaptive Gait Planning 4. Desired Control Torque Generation Control Algorithm Fig5. Control Algorithm 6 Control Algorithm 7 Gait Sequence Synthesis using Walking Motion Sates 6 8 Parameterized State Machine and Target Trajectory Generation 9 Parameterized State Machine and Target Trajectory Generation Adaptive Gait Planning 1) Adequate Foot Placement with a Capture Point (1) (2) 10 Adaptive Gait Planning 2) Step Motion Planning by Simple Interpolation (3) Desired Control Torque Generation 1) State Machine based Control (4) 2) Swing Leg Gravity Compensation Desired Control Torque Generation 3) Stance Leg Balancing with Virtual Model (5) Desired Control Torque Generation 4) Sensory Reflex Control with Potential Barrier (6) 11 (7)