Flexible Element Design: Belts, Ropes, Chains
advertisement

For UG
978-93-84893-67-5
Chapter - 1
DESIGN OF FLEXIBLE ELEMENTS
Design of Flat belts and pulleys - Selection of V belts and
pulleys – Selection of hoisting wire ropes and pulleys – Design of
Transmission chains and Sprockets.
1.1 BELT DRIVES
1.1.1 Introduction
Belt drive is a mechanical drive made up of flexible
material used to transmit power from one shaft (driving
shaft) to another shaft (driven shaft) which are parallel to
each other and run at same (or) different speeds.
The selection of belt drive depends on some important
factors which include, the speed of driving and driven shaft,
power transmitted, speed reduction ratio, centre distance
between the two shafts, space available and so on.
1.1.2 Types of Belt drives
The belt drives are classified based on their specific
applications. They are
(a) Light duty belt drives
These are used to transmit less power (approx 5 kW)
and at belt speeds upto 10 m/s. The main applications of
these type of drives are in agricultural purposes (pumps,
blowers, fans, etc.,)
(b) Medium duty belt drives
These type of belt drives are used to transmit medium
powers (approx. 5 kW to 20 kW) and speed varies from 10
m/s to 20 m/s. The main applications of these type of belt
drives include, machine tools, generators, etc.,
1.2
Design of Transmission Systems
(c) Heavy duty belt drives
These type of belt drives are used for transmitting
heavy power (ie) above 20 kW. The main applications of
these type of belt drives include, crushers, bucket elevators,
marine engines, etc.,
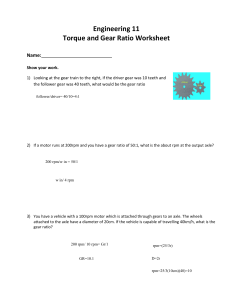
1.1.3 Types of Belts
The belts can be classified based on cross-section and
represented in Fig. 1.1. They are
(i) Flat belts
(ii) V - belts
(iii) Circular belts
(iv) Toothed belts
Types of Belts
(a) Flat belt (b) V - belt (c) Circular belt
F la t b elt
V -b elt
. . .. . .
. . ..
. ..
(a) Flat belt
(b) V-b elt
C ircula r b elt
.
..
..............
..
(c) Circular b elt
Fig. 1.1. Types of Belts.
(i) Flat belts
The Flat belt as shown in Fig.1.1(a) is mostly used
in farming, mining and logging applications. The Flat belt
is a simple system of power transmission. It can deliver
high power at high speeds (370 kw at 50 m/s).
Design of Flexible Elements
1.3
(ii) V - belts
The V - belt as shown in Fig.1.1(b) are generally
endless and their cross-section shape is trapezoidal. The V
- shape of belt tracks in a mating groove in the shaft, with
the result that the belt cannot slip off.
(iii) Circular belts
The Circular belt as shown in Fig.1.1(c) are circular
cross section belt to run in a pulley with a 60 V - groove
round belts are used in case of low torque requirements.
(iv) Toothed belt
The toothed belt, is made as a flexible belt with teeth
moulded onto its inner surface. It runs over matching
toothed pulleys (or) sprockets. Since toothed belts can also
deliver more power that a friction drive belt, they are also
used for high power transmissions. They include primary
drive of some motor cycles.
Materials used for belts
The materials used for belts has to be strong, flexible
and durable. They should have high coefficient of friction.
They are cotton fabrics, leather, rubber, silk, etc.,
1.1.5 Flat Belt Drives
Flat belt drives can be used for transmitting large
amount of power and there is no upper limit of distance
between the pulleys. These drives are efficient at high speeds
and they offer noiseless running. Flat belts are available for
a wide range of width, thickness, weight and material.
1.1.6 Advantages of Flat-belt drive
1. Different velocity ratios can be obtained by using
a stepped cone pulley.
1.4
Design of Transmission Systems
2. A belt drive can be used as a clutch, by shifting
the belt from fast pulley to loose pulley.
3. Design of flat belt drive is simple.
4. Flat belt drive is relatively cheap and easy to
maintain.
5. Flat belt
protection.
drives
are
flexible,
which
gives
6. Close casing is not required, like a gear box.
7. Flat belt drives can be used for long centre
distances (upto 15 metres)
1.1.7 Disadvantages
1. Since velocity ratio is not constant, flat belt drive
is not a positive drive
2. Flat belt drives have larger dimensions and
occupy more space.
3. Flat belt drive is not suitable for smaller centre
distance (less than 1 metre).
1.1.8 Types of Flat belt drives
1. Open belt drive (Fig. 1.2)
2. Crossed or twist belt drive (Fig. 1.3)
3. Quarter turn belt drive (Fig. 1.4)
4. Compound belt drive (Fig. 1.5)
5. Belt drive with idler pulleys (Fig. 1.6)
6. Stepped or cone pulley drive (Fig. 1.7)
7. Fast and loose pulley drive (Fig. 1.8)
Design of Flexible Elements
D rive r
Slack side
D rive n
+
T ig h t s id
e
Fig.1.2. Open Belt Drive.
D rive r
S la
ck s
id e
D rive n
+
+
T ig
ht s
id e
Fig.1.3 Crossed or Twist Belt Drive.
1.5
1.6
Design of Transmission Systems
D rive r
D rive n
G uide pulle y
+
(a) Q uarter Turn Belt Drive.
Fig.1.4
D rive r
(b) Q uarter Turn Belt Drive
with Guide Pulley.
3
1
2
+
+
+
3
1
4
Fo llow er
4
2
Fig. 1.5. C om pou nd Belt Drive.
Design of Flexible Elements
1.7
+
+
Idler
pulleys
D rive r
+
+
+
+
+
Fig.1.6 (a). Belt D rive with M any I dler Pu lleys.
+
+
+
Idler pulley
Fig.1.6 (b). Belt Drive with Single Idler Pulley
D rive n
Pu lleys
Design of Transmission Systems
1.8
D riving pu lley
L ine s ha ft
M ain o f
D riving Sh aft
C o ne pu lley
L oo se p ulley
Fa s t p ulley
D rive sha ft
M ac hine
s ha ft
Fig.1 .8 Fa st and lo os e
pu lle y drive
Fig.1 .7 Stepped o r Cone
Pu lley Drive .
1.1.9 Design Based on Basic Equations
D
d
N1
N2
(D river)
C
(D riven)
Fig.1.9
The Fig. 1.9 represents the open flat belt drive.
Let, d diameter of smaller pulley (Driver)
D diameter of larger pulley (Driven)
N 1 speed of driver
N 2 speed of driven
C center distance between two pulleys
Design of Flexible Elements
1.9
Step 1
Velocity ratio
N2
N1
d
D
dt
Dt
t thickness of belt
(If thickness is considered)
dt
S
1
100
D t
Speed ratio
N1
N2
(where S % of slip)
1
Velocity ratio
D
d
Step 2
Ratio of tensions
T1 Tc
T2 Tc
e
where T 1 tension on tightside in Newtons
T 2 tension on slackside in Newtons
T c centrifugal tension in Newtons
coefficient of friction
angle of contact in radians
2
deg
180
Rr
where sin 1
C
R larger pulley radius
1.10
Design of Transmission Systems
ra dia ns
r smaller pulley radius
C centre distance
Always consider for smaller pulley
Note: is used for cross belt drive
is used for open belt drive
Step 3:
Calculation of T c
Tc Centrifugal tension m v2 in Newton.
where m mass of the belt in kg f/meter length.
where,
density of
volume
t
bel
material
density in kg/m 3
Area length
A Area in m 2 b t
A l kgf/m length
length 1 m assume
b width of belt in m
thickness of belt
in m
t
If is given in kg/cm 3, then assume A in cm 2 and
length 100 cm.
then, m A 100 kg/m length
v vel. of belt (or) belt speed
dN 1
60
or
DN 2
60
m/sec
(d and D must be in meters)
Design of Flexible Elements
1.11
Step 4
Max. tension T S tress Area b t Newton
where stress in the belt N/m 2
b w idth of belt in m eter
t thickness of belt in meter
T T1 Tc
Step 5
Power transmitted by the belt
Also P T 1 T 2 v in watts
Note: For Max. Power Transmission
Tc
T
3
mv2
T
3
v
where T Max. tension in Newtons.
T
[velocity of belt for m ax. pow er.]
3m
Step 6
Initial tension T0
T0
T0
T1 T2
2
(if Tc is neglected)
T1 T2 2T c
2
(if Tc is considered)
1.12
Design of Transmission Systems
Step 7
Length of Open belt drive.
L
D d2
D d 2C
2
4C
Length of Cross belt drive
L
D d
D d 2C
2
4C
2
D larger pulley dia.
d smaller pulley dia.
C Centre distance
1.1.10 Design Based on Manufacturer’s Data
Step 1: Diameter of Driver (or) Driven pulley
Velocity ratio
d N2
D N1
(or)
Speed ratio
D N1
d N2
Find the unknown parameters by using the given
parameters
From P.S.G Data book, Pg.No. 7.54, Take the
standard value of pulley diameters and the tolerances.
Step 2: Velocity of the belt v
v
d N1
60
(or)
D N2
60
in m/s
Step 3: Load correction factor K s
From P.S.G Data book, Pg.No. 7.53, According to
given application, take the Load correction factor K s
Design of Flexible Elements
1.13
Step 4: Arc of contact
From PSG Data book, Pg.No. 7.54
Arc of contact 180
D d
60
C
where
D Diameter of larger pulley
d Diameter of smaller pulley
C Centre distance
Step 5: Correction factor for Arc of contact K
From PSG Data book, Pg.No. 7.54, corresponding to
Arc of contact, correction factor K can be determined.
Step 6: Corrected power
Corrected power Given pow er in kW K
s
or
K
Design power
Step 7: Corrected belt rating
From PSG Data book, Pg.No. 7.54, corresponding to
Load rating per mm per ply at 180 arc of contact at 10 m/s
belt speed, (select for either Fort 949 g (or) Hi-speed 878),
in kW
From PSG Data book, Pg.No. 7.52, corresponding to
minimum pulley diameter and maximum belt speed select
the number of plies.
Corrected belt rating of selected
corresponding arc of contact and belt speed
= Load rating
belt
v
number of plies
10 180
with
1.14
Design of Transmission Systems
Step 8: Width of the belt
From PSG Data book Pg.No. 7.54,
Millimeter plies of belt
corrected load or corrected power
load rating per mm per ply at be lt spe ed
(or)
Width of belt
corrected load
load rating/mm
From PSG Data book, Pg.No. 7.52, The standard belt
width, corresponding to ply was found out
Step 9: Length of the belt
From PSG Data book, Pg.No. 7.53, the Length of the
belt can be calculated.
for open drive
L 2C
D d2
D d
4C
2
for cross drive
L 2C
D d2
D d
4C
2
for Quarter turn drive
L
D d
d2
C2 D
C2
2
2
Step 10: Width of pulley
From PSG Data book, Pg.No. 7.54, corresponding to
the Belt width, the pulleys to be wider than the belt width
by given “mm”
Design of Flexible Elements
1.15
From PSG Data book, Pg.No. 7.54, the recommended
series of pulley diameters and tolerances are determined.
Problem 1.1: Design a suitable flat belt drive to transmit
10 kW at 1500 rpm to a line shaft to run at 500 rpm
Approximate centre distance is 2.0 m. The diameter of larger
pulley is around 750 mm.
(Oct. 2001)
P 10 kW 10 10 3 watt; N 1 1500 rpm;
N 2 500 rpm ;
C 2 metre 2 10 3 mm ; D 750 mm
Velocity ratio
N2
N1
d
D
750 500
500
d
d
250 mm
1500 750
1500
Velocity of belt v
dN 1
60
250 1500
19.63 m sec
60 1000
Load correction factor K s
According to load classification, refer PSG data book,
Page No.7.53 and take the value of KS.
K s 1.3....
for line shafts
Correction arc of contact: K , refer PSG data book,
Page No.7.54.
1.16
Design of Transmission Systems
Arc of contact 180
180
Dd
60
C
750 250
60
2000
165
From the PSG data book, page No.7.54
Correction factor for
at 165
Arc of contact,
K 1.06
Note: Find K by using interpolation between 160
and 170
K
160 1.08
5 0.02
165
1.06
Calculation of Corrected Power
corrected power
K s Given powe r in k W
K
1.3 10
12.26 kW
1.06
Refer PSG data book, page No. 7.52,
According to the minimum pulley diameter and the
maximum belt speed, assume the no. of plies, from table
at v 19.63 m sec and d 250 mm ;
Design of Flexible Elements
1.17
Take, n n o. of plies 5
Calculation of Load rating:
Select high speed belt,
The load rating per mm width per ply at 10 m/sec
0.023 kW mm ply
Load rating at belt speed at v 19.63 m sec
0.023 19.63
10
0.0451 kW mm ply
Calculation of width of the belt
Refer PSG data book, Page No.7.54
Millimeter plies of belt
Corrected load or Corrected power
Load rating m m ply
Width no. of plies
12.26
271.54
0.04515
Width of the belt
271.54
54.3 mm
5
Since n no. of plies 5
Refer PSG data book, Page No.7.52,
For 5 ply belt, the standard width of belt 76 mm
Calculation of length of the belt L:
Refer PSG data book, Page No.7.53
1.18
Design of Transmission Systems
L
D d2
D d 2C
4C
2
L
750 2502
750 250 2 2000
2
4 2000
5602.04 m m
Width of Pulley
Refer PSG data book, Page No. 7.54
up to including 125 mm belt width, pulley is greater
than the belt width by 13 mm
width of pulley 76 13 89 mm
Refer PSG data book, page No.7.54
The recommended pulley nominal diameter 90 mm ;
with tolerance of nominal diameter as 1.2. mm
Problem 1.2: A leather belt 9 mm 250 mm is used to drive
a castiron pulley 90 cm in diameter at 338 rpm. If the active
arc on the smaller pulley is 120 and the stress in the tightside
is 20 kg cm2, find the horse power capacity of the belt which
weights 0.00098 kg cm3. The coefficient of friction of leather
on cast iron is 0.35.
(Apr. ’99 and Apr. 2000)
Given Data
t 9 mm 0.9 cm ; b 250 mm 25 cm ; d 90 cm
N 338 rpm; 120
2.094 radian
180
Stress in the tight side 20 kg cm 2 ;
0.00098 kg cm3; 0.35
Design of Flexible Elements
1.19
Max. tension on the tightside T A rea of belt
20 0.9 25 450 kg
Mass of the belt per meter length m b t l
m 0.00098 25 0.9 100
2.205 kg meter length
where l 100 cm (assume 1 meter)
Centrifugal tension T c mv2
2.205 15.928 2
55.940 N
55.94 kg
v
dN
60
90 338
100 60
v 15.9278 m /sec
Tension on the tight side of the belt T1 T Tc
450 55.94
394.05 kg
1
Power capacity of the belt P T1 Tc 1
v
e
1
394.05 55.94 1
15.9278
0.35 2.094
e
1.20
Design of Transmission Systems
27987.69
kgf m/sec
75
75 kgf m sec 1 HP
P 37.30 HP
Problem 1.3: Two parallel shafts whose centre lines are 4.8
m apart, are connected by an open belt drive. The diameter of
the larger pulley is 1.5 m and that of smaller pulley 1.05 m.
The initial tension in the belt when stationary is 3 kN. The
mass of the belt is 1.5 kg m length. The coefficient of friction
between the belt and the pulley is 0.3; Taking centrifugal
tension into account, calculate the horse power transmitted,
when the smaller pulley rotates at 400 rpm.
(Oct. ’99)
C 4.8 m 4800 m m; D 1.5 m 1500 mm; 0.3;
d 1.05 m 1050 mm; N 1 400 rpm ;
T0 3 kN 3 10 3 N
Initial tension T 0
T 1 T 2 2Tc
2
3 10 3
Centrifugal tension T C mv2
1.5 21.99 2
725.41 N
T 1 T 2 3 10 3 2 2 725.41
T 1 T 2 4549.18 N
1
From open belt drive
Angle of contact 2
Dd
1 1500 1050
Where sin 1
2.68
sin
2C
2 4800
Design of Flexible Elements
2 2.68 174.64
1.21
180
,n
3.048 radia
Velocity of the belt v
d N 1
60 100
1.05 400
60
21.99 m s ec
T1
T2
e;
T1
T2
e0.3 3.048 2.495
T1 2.495 T 2
Substitute the value of T1 in equation (1)
2.495 T2 T2 4549.18
T1
4549.18
1301.6 N
3.495
T 1 2.495 1301.6 3247.49 N
Power Transmitted P T1 T2 v
3247.5 1301.6 21.99
P 42790.34 Watts 42.790 kW
Problem 1.4 Design a fabric belt to transmit 10 kW at 450
rpm from an engine to a line shaft at 1200 rpm. The diameter
of the engine pulley is 300 mm and the distance of the shaft
from the engine 2 m. Take coefficient of friction as 0.2.
[April 2002]
1.22
Design of Transmission Systems
Given Data
Power P 10 kW;
Speed of driver N 1 1200 rpm
Speed of driven N 2 450 rpm
Diameter of driver d 300 mm 0.3 m
Centre distance C 2 m
Solution
Step 1: Diameter of driven D
Velocity ratio
D
D N2
d N1
N2
N1
d
1200
300
450
800 mm
From P.S.G Data book, Pg.No. 7.54, The standard,
value of pulley diameter,
D 800 mm
Step 2: Velocity of the belt
Since v
d N1
60
0.3 1200
60
18.84 m/s
Design of Flexible Elements
1.23
Step 3: Load correction factor K s
From P.S.G Data book, Pg.No. 7.53, corresponding to
line shaft,
K s 1.3
Step 4: Arc of contact
From PSG Data book, Pg.No. 7.54
Dd
Arc of contact 180
60
c
0.8 0.3
180
60
2
165
Step 5: Correction factor for Arc of contact
From PSG Data book, Pg.No. 7.54, corresponding to
Arc of contact, the correction factor
K 1.06 (by interpolation)
Step 6: Corrected power
Corrected power
Given po wer K s
K
10 1.3
1.06
12.26 kW
Step 7: Corrected belt rating
From PSG Data book, Pg.No. 7.54, corresponding to
load rating per mm per ply at 180 arc of contact at 10
m/s belt speed,
1.24
Design of Transmission Systems
Assuming HI-SPEED 878 g duck belting,
Load rating = 0.023 kW/mm/ply
From PSG Data book, Pg.No. 7.52, corresponding to
minimum pulley diameter and maximum belt speed
(ie) corresponding to d 0.3 m 300 mm;
20 m/s
v 18.84 m/s ~
and
The number of plies = 6
Corrected Belt rating of selected
corresponding arc of contact and belt speed
L oad rating
0.023
belt
with
v
number of plies
10 180
18.84 165
6
10
180
0.2383 kW/mm
Step 8: Width of the belt
From P.S.G Data book, Pg.No. 7.54
Width of belt
Corre cted Load
Load rating/mm
12.26
0.2383
Width of belt = 51.44 mm
From P.S.G Data book, Pg.No. 7.52, the standard belt
width, corresponding to ply, = 100 mm
Design of Flexible Elements
1.25
Step 9: Length of the Belt
From PSG Data book, Pg.No. 7.53,
L 2C
D d2
D d
2
2C
22
0.8 0.32
0.8 0.3
2
22
5.79 m 5790 mm
Step 10: Width of the pulley
From PSG Data book, Pg.No. 7.54, corresponding to
belt width
Pulley width 100 13 113 mm
From PSG Data book, Pg.No. 7.52, the standard belt
width corresponding to ply is = 125 mm
Problem 1.5 A pulley of 900 m diameter revolving at 200
rpm is to transmit 7.5 kW find the width of a leather belt if
the maximum tension is not to exceed 145 N in 10 mm width.
The tension on the tight side is twice that on the slack side.
Determine the diameter of shaft and the dimensions of the
various parts of the pulley assuming it to have six arms.
Maximum shear stress is not to exceed 63 MN/m2. [April 2010]
Given Data
Diameter of pulley D 900 mm 0.9 m
Speed of pulley
N 200 rpm
Power of
P 7.5 kW 7500 W
Maximum Tension T 145 N in 10 mm width
Allowable shear stress, 63 MN/m 2
63 10 6 N/m 2
1.26
Design of Transmission Systems
Solution
We know that,
Power transmitted by belt P T1 T2 v
where T 1 Tension in the Tight side
T 2 Tension in slack side
v Velocity of the belt
DN
60
0.9 200
60
v 9.42 m/s
7500 T1 T2 9.42
T1 T2
7500
9.42
T1 T2 796.17 N
Given that,
Tension on the tight side is twice that on the slack
side
T 1 2T2
2T2 T 2 796.17
T 2 796.17 N
and
T 1 1592.35 N
Design of Flexible Elements
1.27
But width of the belt b
Tension which is maximum
B elt ra ting
1592.35
145 /10
. .
. 145 N in 10 mm width
14.5 / mm width
109.81 mm
From PSG Data book, Pg.No. 7.52,
Standard width of belt = 112 mm
Diameter of shaft ds
Since, power
2 NT
60
Torque T
60P
2 N
60 7500
2 200
358 Nm
But diameter of shaft
d3
16T
16 358
d
6
63 10
Dimensions of pulley
(a) Dimensions of rim
Width of pulley, B mm
1/3
0.030702 m
1.28
Design of Transmission Systems
Thickness of pulley, t mm
From PSG Data book, Pg.No. 7.54,
Belt width, upto and including 125 mm
Pulley to be wider than the belt width by 13 mm
Width of pulley B b 13 mm
112 13
125 mm
From PSG Data book, Pg.No. 7.57
Thickness of pulley rim t
D
3 mm
200
[for single belt]
Thickness of pulley rim t
900
3
200
7.5 mm
(b) Dimensions of arm
Number of arms (n)
From PSG Data book, Pg.No. 7.56,
number of arms = 6 (for diameter of pulley over 450
mm)
cross section of arm is elliptical
Thickness of arm
(i) Thickness of arm near the boss (b)
From PSG Data book, Pg.No. 7.56
b 2.94
aD
4n for single belt
3
Design of Flexible Elements
1.29
where a width of pulley 125 mm
D diameter o f pulley 900 mm
n number of arms in pulley 6
b 2.94
125 900
49.20 mm
46
3
Design of Flat Belt Drives (Problems)
Problem 1.6: An open flat belt drive connects two parallel
shafts 1.2 m apart. The driving and driven shafts rotate at
350 rpm and 140 rpm respectively and the driven pulley is
400 mm in diameter. The power to be transmitted is 1.1 kW.
Design the drive.
Given
P 1.1 kW 1.1 10 3 W
C 1.2 m 1.2 10 3 mm
N 1 350 rpm
N 2 140 rpm
D 400 mm
Solution
Step 1: Diameter of driven pulley
Velocity ratio
N2
N1
d
D
d
140
400 350
d 160 mm
1.30
Design of Transmission Systems
Take standard value of pulley diameter from PSG
Data book Pg.No. 7.54
d 160 mm
Step 2: Velocity of the belt
Since v
d N1
60
or
D N2
60
160 350
60 1000
v 2.93 m/s
Step 3: Load correction factor K s
From PSG Data book, Pg.No. 7.53,
Assuming steady load
K s 1.2
Step 4: Arc of contact
From PSG Data book, Pg.No. 7.54
Dd
Arc of contact 180
60
C
400 160
180
60
1200
168
Step 5: Correction factor for Arc of contact K
From PSG Data book, Pg.No. 7.54, corresponding to
~ 170
168
K 1.04
Design of Flexible Elements
1.31
Step 6: Corrected power
Since corrected power
K s Given power in kW
K
1.2 1.1
1.04
1.26 kW
Step 7: Corrected belt rating
From PSG Data book, Pg.No. 7.54, corresponding to
Hi-speed 878 of duck belting and for 10 m/s belt speed
belt rating = 0.023 kW/mm/ply
corrected belt rating for v 2.93 m/s
0.023 2.93 168
10
180
0.006289 kW/mm /ply
Step 8: Width of belt
From PSG Data book, Pg.No. 7.54
Millimeter piles of belt
C orrected power
Load rating/mm/ply
Width Number of piles
Corrected power
Load rating/mm/ply
Width
1.26
0.006289 Number of piles
Width
186.97
Number of piles
From PSG Data book, Pg.No. 7.52, corresponding belt
speed v 2.93 m/s, minimum pulley diameter d 160 mm
1.32
Design of Transmission Systems
Assume number of piles = 4
Width
186.97
46.74 mm
4
From PSG Data book, Pg.No. 7.52
standard width w 50 mm
Step 9: Length of Belt
From PSG Data book, Pg.No. 7.53 for open drive
L 2C
D d2
D d
2
4C
2 1200
400 1602
400 160
2
4 1200
3291.6 mm
L 3300 mm
Step 10: Width of pulley
From PSG Data book, Pg.No. 7.54, belt width upto
and including 125 mm, pulleys to be wider than the width
by 13 mm
Width of the pulley 50 13 mm
Wid th of pulley 63 mm
From PSG Data book, Pg.No. 7.54
The recommended series of pulley diameter and
tolerances is 63 0.8 mm
Design of Flexible Elements
1.33
Problem 1.7: Two pulleys, one 430 mm diameter and the
other 180 mm diameter are on parallel shafts 1.90 m apart
are connected by a cross belt, find the length of the belt
required and the angle of contact between the belt and each
pulley.
What power can be transmitted by the belt when the larger
pulley rotates at 210 rpm, if the maximum permissible tension
in the belt is 1 kN and the coefficient of friction between the
belt and pulley is 0.25?
Given
D 430 mm 0.43 m R 0.215 m
d 180 mm 0.180 m r 0.09 m
C 1.90 m ; N 1 210 rp m ; T 1 1 kN 1000 N;
0.25
Solution
Since length of the flat belt is given from P.S.G Data
book Pg.No. 7.53 for cross drive
L 2C
D d2
D d
4C
2
2 1.9
0.43 0.182
0.43 0.18
2
4 1.9
3.8 0.95818 0.04896
L 4.8071 m 4807.1 mm
We know that, for cross belt drive
1.34
Design of Transmission Systems
Angle of contact 2
Rr
where sin 1
C
0.215 0.09
sin 1
1.9
9.237
180 2 9.237
198
198
3.464 rad
180
Power transmitted by belt drive
P T 1 T2 v
But v
DN 1
60
0.43 210
60
4.72 m/s
But
T1
T2
e and T1 1000 N
1000
e0.25 3.464
T2
T 2 420.63 N
Power Transmitted P 1000 420.63 4.72
2734.62 W
P 2.734 kW
Design of Flexible Elements
1.35
Problem 1.8: An electric motor drives an exhaust fan. The
pulley diameters of the motor and fan are 40 cm and 160 cm
respectively. The angle of contact between belt and pulleys of
motor and fan are 2.5 radians and 3.78 radians respectively.
The coefficient of friction between the belt and motor and fan
pulleys are 0.3 and 0.25 respectively. The speed of the driver
pulley is 700 rpm. Power transmitted by the electric motor is
30 hp. Calculate the width of 5 mm thick flat belt. Take
permissible stress for the belt material as 23 kgf/cm2.
Given
d 40 c m 0.4 m; D 160 cm 1.6 m;
1 2.5 radians, 2 3.78 radians, 1 0.3, 2 0.25
N 1 700 rpm; P 30 HP; t 5 mm; 23 kgf/cm 2
To find
Since
Velocity of the belt v
d N1
60
v
(or)
DN 2
60
0.4 700
60
v 14.7 m /s
But the power transmitted
P
30
T1 T 2
75
T1 T 2
75
v
14.7
1.36
Design of Transmission Systems
T1 T2 153.06 kgf
...(1)
But we know that
T1
T2
T1
T2
e 1 1
2.11
...(2)
From equations (1) and (2)
2.11 T 2 T2 153.06
T 2 137.89 kg f
and T1 290.95 kg f
But know that
Mass of the belt/metre length
= density Area length
Density may be taken as 1 gm/cm 3 (assume)
1
b 0.5 100
1000
0.05 b kg/m
Since the velocity of the belt is more than km/s,
therefore centrifugal tension must be taken into
consideration.
Design of Flexible Elements
Tc
1.37
w
v2
g
0.05 b
14.71 2
9.81
Tc 1.1b kgf
But the maximum tension in the belt;
T T1 Tc stress Area
T T1 Tc bt
290.95 1.1b 23 b 0.5
b 27.88 cm ~
28 cm
Problem 1.9: Design a flat belt drive to transmit 110 kW for
a system consisting of two pulleys of diameters 0.9 m and 1.2
m respectively, for a centre distance of 3.6 m, belt speed of 20
m/s and coefficient of friction 0.3. There is a slip of 1.2% at
each pulley and 5% friction loss at each shaft with 20% over
load.
Solution
1.38
Design of Transmission Systems
Given: P 110 kW 150 HP, d 0.9 m 90 cm ,
r1 0.45 m, 1.2 m, D 120 cm, r2 0.6 m ;
C x 3.6 m ; v 20 m/s ; 0.3 ; S 1 S 2 1.2%
Let
N 1 Speed of the smaller or driving pulley in rpm
N 2 Speed of the larger or driven pulley in rpm
We know that speed of the belt v
v
d 1N 1
S1
1
60
100
20
0.9 N1
1.2
1 100
60
N 1 430 rpm
and peripheral velocity of driven pulley
d 2N 2
60
1.2 N 2
60
S2
v1
100
1.2
20 1
100
N 2 315 rpm
We know that the torque acting on the driven shaft
Power transmitte d 4500
2 N2
150 4500
2 315
341 kg f m
Design of Flexible Elements
1.39
Since there is a 5% friction loss at each shaft,
therefore the torque acting on the belt
1.05 341
358 kg f m
Since belt is to be designed for 20% overload,
therefore the design torque,
1.2 358
430 kg f m
Let T1 Tension on the tight side of the belt
T 2 Tension on the slack side of the belt
We know that the torque exerted on the driven pulley.
T 1 T2 r2 T1 T2 0.6
0.6 T 1 T 2 Kg f m
Equating this to the design torque, we have
0.6 T1 T2 430
T 1 T 2
430
717 kg f
0.6
T 1 T 2 717 kgf
...(1)
Now let us find out the angle of contact of the belt
on the smaller or driving pulley. From the geometry of the
figure, we find that
sin
O 2M
O 1O 2
2.4
r2 r1
x
60 45
0.0417
360
1.40
Design of Transmission Systems
180 2 180 2 2.4 175.2
175.2
3.06 rad
180
We know that
T1
T e
2
e0.3 3.06
T1
0.918
e
T2
T1
or
T2
2.51
...(2)
From equations (1) and (2), we have
T1 1192 kgf and T 2 475 kgf
Assuming
f safe stress for the belt = 25 kgf/cm2
t thickness of the belt 1.5 cm
b Width of the belt.
Since the belt speed is more than 10 m/s, therefore
centrifugal tension must be taken into consideration.
Assuming a leather belt for which the density may be taken
as 1 gm /cm 2
Weight of the belt permetre length
w Area length density
b 1.5 1000 1
0.15 b kg/m
Design of Flexible Elements
1.41
and centrifugal tension
Tc
w
v2
g
0.15b
202
9.81
6.12b kgf
We know that maximum tension in the belt,
T T1 Tc f.b.t
1192 6.12b 25 b 1.5 37.5 b
37.5b 6.12 b 1192
b 37.98 cm
From Design data book, the standard width of the
belt b is 40 cm.
From Design data book, Pg.No. 7.53 for open drive
d 2 d 12
L 2x d 2 d1
4x [x C centre distance]
2
2 360
120 902
120 90
2
4 360
1050.6 c m
L 10.506 m
Problem 1.10: Design a belt drive to transmit 20 kN at 780
rpm to an rolling machine, the speed ratio being 3.0, the
distance between the pulleys is 2.8 m. Diameter of rolling
machine pulley is 14 m.
1.42
Design of Transmission Systems
Given Data
P 20 kW; N 1 780 rpm ; i 3; C 2.8 m ; D 1.4 m
Solution
Step 1: Diameter of Driver pulley
We know that
Speed ratio i
d
D N1
d N2
D 1.4
0.466 m
i
3
Step 2: Velocity of belt in m/sec
r
d N1
60
or
D N2
60
0.466 780
60
19.03 m/s
Step 3: Load correction factor K s
From PSG Data book Pg.No. 7.53;
Load correction factor k s 1.5 (for rolling machine)
Step 4: Arc of contact
From PSG Data book, Pg.No. 7.54
Dd
Arc of contact, 180
60
C
1.4 0.466
180
2.8
160
159.98 ~
160
Design of Flexible Elements
1.43
From PSG Data book, Page No. 7.54,
Correction factor, K 1.08
Step 5: Corrected power
Since corrected power
K s Given pow er in k W
K
1.5 20
1.08
corrected power 27.7 kW
Step 6: Corrected belt rating
From PSG Data book, Pg No. 7.54,
Load rating per mm width per ply at 180 arc of
contact, at 10 m/s belt speed.
Assuming Fort 949 g duck belting,
The load rating = 0.0289 kW per mm per ply.
From PSG Databook Pg.No. 7.52, corresponding to
the minimum pulley diameter, d 0.466 m 466 mm
velocity = 19.03 m/s
Assuming No. of piles = 6
Belt capacity of selected belt with corresponding
arc of contact 160 and belt speed of 19.03 m/s
0.0289
19.03 160
6
10
180
0.2933 kW /mm width
Step 7: Width of belt
From PSG Data book, Pg.No. 7.54
1.44
Design of Transmission Systems
Millimeter piles of belt
Corrected load
loa d rating/mm/ply at belt spe ed
(or) Width of belt b
Corrected load
27.7
load ra ting/mm 0.2933
b 94.44 mm
From PSG Data book, Pg.No. 7.52,
The standard belt width corresponding to 6 ply = 152 mm
Step 8: Length of the belt
From PSG Data book, Pg.No. 7.53,
Assuming open drive belt,
Belt length L 2C
L 2 2.8
D d2
D d
4C
2
1.4 0.466 2
1.4 0.466
2
4 2.8
8.608 m
Step 9: Width of pulley
From PSG Data book, Pg.No. 7.54, corresponding to
the belt width above 125 upto and including 250 mm,
pulleys to be wider than the belt width by 25 mm.
Width of the pulley 152 25 mm
b 177 mm
From PSG Data book, Pg.No. 7.54, the recommended
pulley diameter 180 2.0 mm
Design of Flexible Elements
1.45
1.2. DESIGN OF V-BELT DRIVE
1.2.1 Introduction
V-Belt is a type of flexible connector used for
transmitting power from one pulley to another pulley
having a centre distance upto 3 metres.
V-Belts are used with electric nylon to drive different
equipments like blowers, compressor, machine tool,
industries machinery, etc. The belts are operated on
grooved pulley called sheaves. The sheaves have V - shaped
grooves or two inclined sides with flat bottom. The belt
makes contact with the sheaves on the sides and clearance
at the bottom.
Usually V - Belts are endless ie., each belt is made
in a circular form with various cross section which may be
differentiated by different grades. It is made in trapezoidal
section and the power is transmitted by the wedging action
between the belt and the V -groove of the pulley or sheave.
The cross-section of V - belt is discussed in article 1.2.4.
A properly installed V - belt should fit tightly against
the sides of the pulley grooves without making any
projection beyond the rim and should have efficient
clearance bottom of the groove.
The materials used for V-belts are cotton fabric and
cards moulded in rubber and coined with fabric and rubber
(fig. 1.10).
1.2.2 Advantages
1. High velocity ratio (upto 7 and in some cases 10
also)
2. Smaller centre distance.
1.46
Design of Transmission Systems
3. Reliability of the drive, in any position; even with
vertical shafts.
4. Replacement is easy, because V-belts are available
in standard sizes.
5. Smooth operation.
1.2.3 Disadvantages
1. Design of V-belt drive is more complicated.
2. Cannot be used for larger centre distance.
1.2.4 The Cross-section of V-belt
Standard
trapezoidal.
section
of
belt: Cross-section
2 Groove angle
x
w
C.S. Area
a
Fa bric and
R u bb er C over
Fa bric
40 general
To find cross-sectional area:
is
C o rds
T
R u bb er
b
1
[W b] T
2
Fig.1.10.Cross - Section of a V -Belt
To find (b):
tan 20
x
T
x T tan 20
b W 2x
W 2 T tan 20
1.2.5 Types of V - belts
According to BIS (IS - 2494 - 1974), V-belts are
classified as A, B, C, D and E types.
Design of Flexible Elements
1.47
For various dimension of standard V-belt.
Refer PSG Data book Pg.No. 7.70.
DESIGN OF V-BELTS
I. Based on Basic equations:
T1
T2
e/sin
Semi groove an gle
Angle of contact in radians
T 1 Tension on tight side
T 2 Tension on slack side
T1 Tc
T2 Tc
e/sin
T c C entrifugal tension
m v2
v Speed of the belt in m/sec.
1
Power transmitted per beltP T 1 T c 1
v
/sin
e
n Number of V belts
Total power transmitted
Power trans mitted per b elt
II. Design Based On Manufacturer’s Data
Refer data book, Page No: (From 7.58 to 7.69)
*Step 1
From the given data, select the cross-section of the
belt depending on the power to be transmitted.
From PSG data book Page No. 7.58
Note the corresponding values,
Belt cross section, W, T, mass of belt, and minimum
pulley dia;
1.48
Design of Transmission Systems
*Step 2
Select smaller pulley dia. from the table P.No. 7.58
of PSG Data book and find larger pulley dia. by using speed
ratio.
D Larger pulley dia;
d Smaller pulley dia;
N 1 Speed of driver pulley ;
N 2 Speed of driven pulley ;
*(Take R20 series for pulley diameter)
V-belt
No. 7.61.
designation
refer
PSG
data
book
Page
C 3048/120 1S:2494 means,
C - represents - Cross section
3048 - represents nominal inside length.
Step 3
Calculate nominal pitch length (L) (P.No. 7.53)
L
D d2
D d
2C
4C
2
From PSG Data book Page No.7.58, 7.59 and 7.60,
according to the Cross-section of the belt; select the nearest
nominal pitch length and take the corresponding nominal
inside length.
*Represent the belt length in terms of nominal inside
length along with cross-section as Designation of V-belt.
*Step 4
Calculation of design power
Refer PSG data book, Page No. 7.62
Design of Flexible Elements
1.49
According to the cross-section, from PSG databook,
Calculate the Power
Ex: Let the C.S. of belt is (B)
Power/belt 0.79 S 0.09
where S belt speed
d1 N 1
60
50.8
1.32 10 4S2 S
de
m/sec
de equivalent pitch diameter
dp Fb
d 1 dia. of smaller pulley in m .
N 1 Speed of smaller pulley in m
where d p Smaller pulley diameter mm
F b From PSG Data book table, P. No. 7.62 according
to speed ratio D/d
Take value of F b at
D
ratio.
d
N 1 driven dia D
Speed ratio
N
driver dia d
2
*To Find No. of belts
Refer PSG Data book Page No. 7.70
No. of belts n
P Fa
kW F c fd
where P given power in kW
F a Co rrection factor 7.69 refer PSG data boo k
Page No. 7.69
kW Power at the corresponding crosssection .
1.50
Design of Transmission Systems
F c Correction factor for length Refer data book Page No. 7.59 and 7.60
F d Correction factor for arc of contact Refer data book Page No. 7.68
Dd
180
60
C
C given ce ntre distance.
at value, take F d
* Calculation of new centre distance
(From PSG Data book Page No. 7.61)
CA
A2 B
where
Dd
L
A
8
4
B
D d2
8
*Calculation of T 1 and T 2
T1 Tc
T2 Tc
e /sin
... (1)
SemiGroove a ngle
Dd
Arc of contact 180
60
C
C alculate in radians.
Centrifugal tension Tc m v2
where m b t 1 kg/m length
density of belt material kg /m 3
b t C.S. area of Vbelt
Design of Flexible Elements
1.51
m C .S. area 1 kg/m length
(C.S. must be in m 2)
v
d N1
60
m/sec
d smaller pulley dia. in m .
(or)
Mass can be read from PSG data book Pg No. 7.58
according to cross-section area.
Take mass/m length.
Tc m v2 Newton.
Power transmitted/belt T1 T2 v
... (2)
Solving eq (1) and eq (2) and Calculate T1 and T 2
*Calculation of stress: fb
Max. permissible tension T fb area of belt
fb permissible stress in the belt
But, T T1 Tc
T 1 T c fb area of belt
Calculate fb:
T1 T2
* Initial tension T o
2
1.52
Design of Transmission Systems
Problem 1.11: A 30 kW, 1440 rpm, motor is to drive a
compressor by means of V-belts. The diameter of pulleys are
220 mm and 750 mm; The centre distance between the
compressor and motor is 1440 mm. Design a suitable drive.
(Apr. ’97)
Given data:
P 30 103 Watts
Driver speed N1 1440 rpm ;
Driver pulley dia. d 220 mm
Driven pulley dia. D 750 mm;
Centre distance between the compressor and motor
C 1440 mm
1.44 m
Step 1
From PSG data book, Pg. No. 7.58.
Select Cross-section of the belt.
Select either (C), (D) or (E)
Select (C) type Belt (Since minimum pulley pitch dia
= 220 mm given)
Load of drive
P 22 kW to 150 kW
Min. pulley pitch diameter 200 mm
Nominal top width
W 22 mm
Nominal thickness
T 14 mm ;
Weight/meter
0.343 kg f/m length
Design of Flexible Elements
C.S. area of belt
1.53
1
W b T
2
1
[22 11.81 ] 14
2
236.67 mm2
Step 2
Nominal pitch length L
D d2
D d
2C
4C
2
750 2202
2 1440
750 220
2
4 1440
4452.439 mm
4.452
.
m
Take the nearest nominal pitch length from PSG data
book.
Refer PSG data book P.No. 7.60,
Take standard nominal pitch length
(Nearest)
The
corresponding
4394 mm .
nominal
4450 mm ;
inside
length
The Designation of V-belt C 4394 1S2494
Step 3
Calculation of Design Power P in kW
Refer PSG Data book Page No. 7.62
kW 1.47S 0.09
142.7
2.34 10 4S2 S
de
[S v velocity]
1.54
Design of Transmission Systems
S
dN 1
60
0.22 1440
16.587 m /sec
60
de Equiva le nt pitch diam eter
dp Fb
220 1.14
250.8 m.m
dp pitch dia. of smaller pulley
220 mm
D 750
3.4
d 220
F b 1.14 (Refer PSG data book Pg. No. 7.62)
142.7
0.09
4
2
2.34 10 16.587 16.587
kW 1.47 16.587
250.8
P 8.4312 kW
Step 4
To find the no. of belts (n)
Refer PSG Data book page No. 7.70
No. of belts n
P Fa
kW F c F d
where
P given po wer kW
F a co rrection factor from PSG data book Page No. 7.69
Let the time period is upto 10 hr.
F a 1 (for compressor)
kW Power at the corresponding C.S. ie at C Cross section
Design of Flexible Elements
1.55
F c C orrection factor for length P.No.7.60 1.04
F d Correction factor for arc of contact
Dd
180
60
C
750 220
180
60 157.9
1440
158
Refer PSG Data book page No. 160 0.95
7.68
for 158, F d 0.94
157 0.94
0.01
3
1
0.01 1
3
0.0033
158 0.94 0.0033
n no. of belts
30 1
8.4312 1.04 0.94
3.63
0.9433
4 belts
No. of belts required n 4
Calculation of new centre distance
CA
A2 B
A
Dd
L
4
8
B
D d2
8
(from PSG Data book P.No. 7.61)
L nominal pitch length
4450 m m
1.56
Design of Transmission Systems
A
750 220
4450
731.58 mm
8
4
B
750 2202
35112.5 mm
8
C 731.58
731.58 2 35112.5
New centre distance C 1438.75 mm
Calculation of T 1 and T 2
T1 Tc
T2 Tc
e /sin ... (1)
2 40
Semi-groove angle 20
Let 0.25
158
180
2.75 radians
Tc mv2 0.343 16.5872
94.36 N
m 0.343 kgf/m length
v S 16.587 m /sec
1
Power/belt [T 1 T c] 1
v
/sin
e
1
8.3412 10 3 T1 94.36 1
16.587
0.25 2.75 / sin 20
e
8.4312 10 3 T1 94.36 14.364
T 1 681.3274 N
Design of Flexible Elements
T1 Tc
T2 Tc
1.57
e/sin
681.3274 94.36
e0.25 2.75/sin 20
T 2 94.36
5869619
7.464
T2 94.36
T 2 78.638 94.36
T 2 172.998 N
To Find Stress fb
T T1 T2 fb area of belt
681.3274 94.36 fb 236.66
Permissible stress in the belt material
fb 3.28 N/mm 2
Problem 1.12: Design
a
V-belt
drive
to
the
following
specifications
Power to be transmitted 75 kW
Speed of the driving wheel N1 1440 rpm;
Speed of the driven wheel N2 400 rpm;
Diameter of the driving wheel d 300 mm;
Centre distance 2500 mm
Service 16 hours/day
Assume any other relevant data if necessary.
Given Data:
P 75 10 3 Watts
(Oct. 2007)
1.58
Design of Transmission Systems
Driving Wheel Speed N 1 1440 rpm ;
Driven Wheel Speed N 2 400 rpm
Driving wheel diameter d 300 mm
Centre distance C 2500 mm ;
Service 16 hr/day .
Step 1
Selection of Cross section;
From PSG data book, Page No. 7.58
Since minimum pulley dia. is 300 mm
Select (C) cross section
Nominal Width
W 22 mm
Nominal thickness t 14 mm
Mass/kg m 0.343 kg/m length
1
W b t
2
1
[22 11.808] 14 236.656 mm 2
2
C.S. area
Step 2
Nominal Pitch length L
D d2
2C
D d
4C
2
1050 3002
1050 300
2 2500
2
4 2500
7176.82 mm
L 7.176 m
Design of Flexible Elements
N1
N2
D
1.59
D
d
N1
N2
d
1440
300 1050 m m
400
Take the nearest value of nominal pitch length (from PSG
data book 7.60) L 6863 mm
The Corresponding nominal inside length = 6807 mm
Step 3
Calculation of Design Power
From PSG Data book page No. 7.62 : for (C) C.S. of
the belt
142.7
2.34 10 4S2 S
kW 1.47S 0.09
de
S
dN 1
60
0.3 1440
22.61 m/sec
.
60
d e equivalent pitch diameter
dp Fb
300 1.14 342 mm
where dp pitch dia. of smaller pulley
refer PSG Data book page no. 7.62 at
D
3.6 the value
d
of F b 1.14
But the max. value of d e in the formula is 300 mm
for (C) cross-section.
Take de 300 mm
142.7
2.34 10 422.612 22.61
kW 1.47 22.61 0.09
300
1.60
Design of Transmission Systems
Max. power transmitted by belt 11.643 kW
Step 4
To find the no. of belts
(Refer PSG Data book page No. 7.70)
No. of belts n
P Fa
kW Fc F d
P 75 kW
F a 16 hrs/day
(Page No. 7.6 PSG databook)
Select medium duty
[Since specific application is not given]
F a 1.2
P Pow er 11.643 kW
F c 1.14 - refer PSG Data book Page No. 7.60 at
Cross-section C
Refer PSG databook, Page No. 7.68.
F d 0.95
Dd
180
60
C
1080 300
180
60
2500
161.28
Take 160;
n no . o f belts required
75 1.2
11.643 1.14 0.95
7.137
Design of Flexible Elements
1.61
= n 8 belts
8 belts are required.
Calculation of New Centre Distance
Refer PSG databook Page No. 7.61
CA
A2 B
A
L D d
4
8
B
D d2
8
A
6863 1080 300
8
4
1173.8252
B
1080 3002
8
76050
New centre distance
C 1173.8252
1173.8252 2 76050
C 2314.796 mm
Problem 1.13: A 20 kW, 1440 rpm motor is to drive a
compressor by V-belt drive with a speed ratio of 3. Design the
drive completely for a centre distance of about 1.5 meter.
(Oct. 2000, Nov/Dec 2014)
Given data:
P 20 kW 2 10 3 Watts; N1 1440 rpm
1.62
Design of Transmission Systems
Speed radio i 3
N1
N2
Centre distance, C 1.5 m 1500 mm
N 2 Speed of driven pulley,
N1
3
1440
480 rpm
3
Selection of Standard V-belt section
Refer PSG data book, page No.7.58
Select cross-section ‘C’ and its minimum pulley pitch
diameter d 200 mm
But, i
D
d
D Pitch diameter of larger pulley
3 200 600 mm
Take the values of W, t and weight per meter length
W 22 mm; t 14 mm; m 0.343 kg m length
Calculation of Nominal Pitch length (L):
Refer PSG data book Page No. 7.53
L
D d2
D d 2C
4C
2
600 200 2
600 200 2 1500
2
4 1500
4283.30 mm
Nominal pitch length L 4283.30 mm
From PSG data book, page No.7.50
Design of Flexible Elements
1.63
A belt of ‘C ’ cross-section with nominal pitch length
4450 mm is selected (next higher value of the calculated
pitch length L).
The corresponding Nominal inside length 4394 mm
Designation
A V-belt cross-section C and of nominal inside Length
of 4394 mm shall be designated as C 4394 1S:2494
Calculation of Design Power
The maximum power in kW. Which the V-belts of
section A, B, C, D and E can transmit shall be calculated
from the following equations.
Refer PSG data book Page No. 7.62
For C-section
142.7
2.34 10 4 S 2 S
kW 1.47 S 0.09
de
kW [1.47 15.079 0.09
142.7
228
2.3 10 4 15.0792] 15.079
1.151 0.6258 0.05229 15.079
7.117 kW
Where S belt speed
d N 1
60
200 1440
15.079 m/sec
60 1000
de eq uivalent pitch diameter
d p Fb
1.64
Design of Transmission Systems
dp pitch dia. of smaller pulley
200 mm
Fb
small diameter factor (refer PSG data book
P.No. 7.62)
for
D 600
3; Fb 1.14
d 200
de 200 1.14
228 mm
To Find No. of Belts n
Refer PSG data book, Page No. 7.70
No. of belts n
P fa
kW F c Fd
F a 1.1 (Assume medium duty and upto 10 hr.)
To Find F d:
Arc of contact angle
Dd
180
60
C
600 200
180
60
1500
164
where P given power in kW.
F a correction factor (refer PSG data book P.No.
7.69)
Design of Flexible Elements
1.65
F c Correction factor for length refer PSG data book
P.No. 7.58
F c 1.04
F d Correction factor for arc of contact (refer PSG
data book P.No. 7.68)
at 164; the value of F d 0.965 (approx)
n No. of belts
20 1.1
7.117 1.04 0.965
n 3.08
Take n 4 belts.
Calculation of New centre distance (Refer PSG data
book Page No. 7.61)
CA
A2 B
A
L D d
4
8
L N ominal P itch length
4450 mm
D 600 mm
4450 600 200
8
4
798.34 mm
2
600 200
D d
8
8
20,000 mm
d 200 mm
2
B
C New centre distance A
A2 B
798.34
798.34 2 20.000
1584.05 mm
Take, C New centre distance 1584 mm
1.66
Design of Transmission Systems
Problem 1.14 Design a V-belt drive to transmit 50 kW at
1440 rpm from an electric motor to a textile machine running
24 hours a day. The speed of the machine shaft is 480 rpm.
Solution
Given data
P 50 kW 50 10 3 watts
Driver speed
N 1 1440 rpm
Driven speed N 2 480 rpm
Service
24 hours a day
we know
Speed ratio i
N1
N2
1440
3
480
from P.S.G Data book, Pg.No. 7.58
for the power 50 kW, ‘C’ type of belt may be selected.
For this belt, the minimum pulley pitch diameter is
dmin 200 mm
from P.S.G Data book, Pg.No. 7.62
equivalent pitch diameter de
max
dpmax F b max from
P.S.G Data book Pg.No. 7.62, corresponding to Belt
300 mm
cross-section ‘C’ de
max
and corresponding to speed ratio range
F b max 1.14
dp max
de max
F b max
300
263.15 mm
1.14
Design of Flexible Elements
1.67
Hence we should select the diameter of smaller pulley
d between 200 to 263.15 mm
Let us select d 250 mm
from P.S.G Data book, Pg.No. 7.61
Diameter of larger pulley
Dd
N1
N2
250
1440
0.98
480
D 735 mm
[ 0.98 a ssum ed]
from P.S.G Data book, Pg.No. 7.61, corresponding to
i 3,
C
1.0
D
C 1 735
C D 735 mm where c centre distance
from P.S.G Data book, Pg.No. 7.61
C min 0.55 D d T
where T N ominal T hickness 14 mm
(from P.S.G Data book Pg. No. 7.58, corresponding to
cross section of belt)
C min 0.55 735 250 14
556 mm
from P.S.G Data book, Pg.No. 7.61
1.68
Design of Transmission Systems
C max 2 D d
2 735 250
1970 mm
Since, calculated ‘C’ value is in between C m in and
C m ax our selection is correct. From P.S.G Data book,
Pg.No. 7.58
corresponding to cross-section symbol ‘C’
Nominal top width W 22 mm
Weight per metre
0.343 kgf
But C.S.A of belt
1
W b T
2
but x T tan 20
14 tan 20
5.0955 mm
b W 2x
22 2 5.0955
11.808 mm
C.S.A of belt
1
[ 22 11.808 ] 14
2
236.66 mm 2
from P.S.G Data book, Pg.No. 7.61
Nominal pitch length of belt
Design of Flexible Elements
L
D d2
D d
2C
2
4C
738 250 2
725 250
2 735
2
4 735
3097 mm
from P.S.G Data book, Pg.No. 7.60
Take standard Nominal pitch length 3104 mm
Nominal inside length
3048 mm
from P.S.G Data book, Pg.No. 7.62
Design power
kW 1.47 S 0.09
But S
d N 1
60
142.7
2.34 10 4 S 2 S
de
0.250 1440
60
18.85 m/s
and
de dp F b 250 1.14 285 mm
Design power
[1.47 18.85
0.09
142.7
4
2
2.34 10 18.85 ] 18.85
285
10.26 kW
from P.S.G Data book, Pg.No. 7.70
No. of belts n
P Fa
kW F c F d
1.69
1.70
Design of Transmission Systems
where P given power in kW
from P.S.G Data book, Pg.No. 7.69
F a 1.4 for electric motor for textile machinery
from P.S.G Data book, Pg.No. 7.60
F c 0.97 corresponding to Nominal pitch length and
cross-section of belt
from P.S.G Data book, Pg.No. 7.68
Dd
180
60
C
735 250
180
60 140.4
735
Fd 0.845 , from P.S.G Data book, Pg.No. 7.68
n number of belts
50 1.4
10.26 0.97 0.845
8.32
~
9 belts
Calculation of new centre distance
From P.S.G Data book Pg.No. 7.61
CA
A2 B
But A
Dd
L
4
8
735 250
3104
8
4
389.19
Design of Flexible Elements
B
1.71
D d2 735 2502
29403.1
8
8
389.19 2 29403.1
C 389.19
New centre distance C 738.56 mm
Problem 1.15 Select a suitable V-Belt drive to connect a
7.5 kW, 1440 rpm, induction motor to run a fan at
approximately 480 rpm for a service of 16 hr per day. The
space available for centre distance is 1 m.
Solution
Given
N 1 1440 rpm, N 2 480 rpm
P 7.5 kW, Service 16 hrs/day
C1m
Since the diameters of Driving pulley and Driven
pulley are not given, they may be assumed.
Let d Diameter of smaller pulley i.e. driving pulley
D Diameter of bigger pulley i.e. driven pulley
For the power of 7.5 kW, ‘B’ type belt may be selected.
For ‘B’ type belt dmin 125 mm , and dmax is calculated as
follows.
Equivalent pitch diameter [From P.S.G. Data book,
Pg.No. 7.62]
de max dp max F b max
(ie)
dp max
de max
F b max
175
153.5 mm
1.14
1.72
Design of Transmission Systems
Since F b max 1.14 from P.S.G. Data book, Pg.No.
7.62 corresponding to speed ratio range. D/d.
and de max is from P.S.G. Data book, Pg.No. 7.62,
from corresponding to cross-section ‘B’.
Hence “d” should be in between 125 to 153.5 mm.
Step 1
Let diameter of driving pulley d 140 mm
D
N1
N2
d
1440
140 0.98
480
D 412 mm
here is assumed as 0.98 from P.S.G. Data book,
Pg.No. 7.61
i
D N1
3
d N2
Design power
Rated power service factor
Length facto r Arc of contact factor
Service factor 1.1 for light duty a nd 16 hrs/day
(from P.S.G. Data book, Pg.No. 769)
Step 2
Pitch length of the belt
L 2C
D d2
D d
4C
2
2 1000
(from Pg.No. 7.61)
412 1402
412 140
2
4 1000
2885.4 mm
Design of Flexible Elements
1.73
Take the nearest value of Nominal pitch length (from
P.S.G. Data book, Pg.No. 7.60); L 2888 mm
The corresponding nominal inside length 2845 mm
(from P.S.G. Data book, Pg.No. 7.60)
Step 3
Calculation of Design power
from P.S.G. Data book, Pg.No. 7.62
kW 0.79S 0.09
S
50.8
1.32 10 4 S2 S
de
d N1
60
0.140 1440
10.555 m /sec
60
de equivalent pitch diameter
dp F b dp Pitch dia of sma ller pulley
140 1.14
159.6 mm
~
160 mm
kW 0.79 10.555
0.09
50.8
4
2
1.32 10 10.55 10.55
160
0.63902 0.3175 0.0147 10.55
0.3068 10.555
3.2368 kW
1.74
Design of Transmission Systems
Step 4
To find the No. of belts
from P.S.G. Data book, Pg.No. 7.70
number of belts n
P Fa
kW F c F d
P 75 kW ,
F a 1.1 (for light duty application from P.S.G. Data
book, Pg.No. 7.69)
kW 3.2368 kW
F c 1.05
(from P.S.G. Data book, Pg.No.
7.60,
corresponding to cross section ‘B’ and nominal Inside
length)
from P.S.G. Data Book Pg.No. 7.68
Dd
Arc of contact angle 2 cos 1
2c
Dd
180 60
c
412 140
180 60
1000
163.68 ~
163
F d 0.96
(from P.S.G. Data book, Pg.No. 7.68,
corresponding to Arc of contact on smaller pulley)
Design of Flexible Elements
1.75
Number of belts required
75 1.1
26 belts
25.285 ~
3.2368 1.05 0.96
Hence, 26 belts are required
Calculation of New centre distance [from P.S.G. Data
book, Pg.No. 7.61]
CA
A2 B
where
A
L
D d
4 8
2885.4
412 140
8
4
504.58
B
D d2
9,248
8
New centre distance
C 504.58
504.58 2 9248
C 999.91 mm
Initial tension 0.5 to 1% L [from P.S.G. Data book,
Pg.No. 7.61]
Take 1% of L 2888
1
28 mm
100
Final centre distance 999.91 28
1027 mm
1.76
Design of Transmission Systems
width of pulley n 1 e 2f
f E dge of pulley to first groove centre
where
n total numb er of belts
e centre to centre distance of grooves
26 1 19 2 12.5 (from P.S.G. Data book, Pg.No. 7.70
500 mm
Specifications
Type of Belt: B 2845/116 IS 2494 (V Belt)
Number of Belts: 26
Pitch diameter of smaller pulley: 140 mm
Pitch diameter of bigger pulley: 412 mm
Centre distance: 1027 mm
Problem 1.16 A motor driven blower is to run at 600 rpm
driven by an electric motor of 8.5 kW at 1900 rpm. Design v-belts.
Given data
Power P 8.5 kW
Speed of driver N 1 1900 rpm
Speed of driven N 2 600 rpm
Solution
Step 1: Selection of cross section of belt
Since the diameters of the pulleys are not given, they
can be assumed.
From PSG Data book, Pg.No. 7.58
for the power 8.5 kW, ‘C ’ type belt may be selected.
For ‘C ’ type belt, dmin 200 mm
Design of Flexible Elements
1.77
Nominal top width W 22 mm,
Thickness t 14 mm,
Weight per metre 0.343 kg f
Step 2: Selection of diameters
From PSG Data book, Pg.No. 7.62,
Equivalent pitch diameter
d e dp F b
(or)
de
max
dpmax F b max
From PSG Data book, Pg.No. 7.62, corresponding to
‘C ’ type belt
de
max
300 mm
and corresponding to D/ d ratio,
F b max 1.14
dpmax
de
max
F b max
300
263.15 mm
1.14
Therefore Diameter of smaller pulley d (or) driver
pulley
d 230 mm
From PSG Data book, Pg.No. 7.61
Diameter of larger pulley
D d
N1
N2
Where N 1 rpm of smaller pulley (Driver pulley)
1.78
Design of Transmission Systems
and
N 2 rpm of Larger pulley (driven pulley)
and
0.98 (assumed)
D 230
1900
0.98
600
713.76 mm
Step 3: Determination of centre distance
From P.S.G Data book, Pg.No. 7.61,
i
D 713.76
3.1
d
230
From P.S.G Data book, Pg.No. 7.61, corresponding to
i 3.1 ~
4
C
0.95
D
C 0.95 713.76
C 678.072 mm
From PSG Data book, Pg.No. 7.61,
C min 0.55 D d
0.55 713.76 230 14
533.06 mm
C max 2 D d
2 713.76 230
1887.52 mm
Design of Flexible Elements
1.79
Since the calculated a 678.072 mm is between
C min and C max, The calculated centre distance is correct.
Step 4: Nominal pitch length of belt L
From PSG Data book, Pg.No. 7.61
L 2C
D d2
D d
4C
2
2 678.072
713.76 230 2
713.76 230
2
4 678.072
2819.35 mm
From P.S.G Data book, Pg.No. 7.60, corresponding to
cross-section C
Nominal pitch length L 2901 mm
The corresponding Nominal Inside length = 284.5 mm
Step 5: Calculation of Design power
From P.S.G Data book, Pg.No. 7.62, corresponding to
belt cross-section symbol ‘C’,
142.7
2.34 10 4 S2 S
kW 1.47 S 0.09
de
since S belt speed
N1
60
0.230 1900
60
22.8 m/s
From P.S.G Data book, Pg.No. 7.62,
1.80
Design of Transmission Systems
de dp Fb (or) d F b
230 1.14
de 262.2 de
max
300
142.7
0.09
4
2
kW 1.47 22.8
2.34 10 22.8 22.8
262.2
kW power 10.113 kW
Step 6: Number of belts
From P.S.G Databook, Pg.No. 7.70
Number of belts
P Fa
kW Fc F d
Power P 8.5 kW (given)
From P.S.G Data book, Pg.No. 7.69,
Assuming medium duty service and over 16 hr and
continuous service
F a 1.3
From P.S.G Data book, Pg.No. 7.60, corresponding to
Belt cross section ‘C’ and Nominal inside length = 2845 mm
F c 0.95
From P.S.G Data book, Pg.No. 7.68,
Dd
Arc of contact 180
60
C
713.76 230
180
60
678.072
137
Design of Flexible Elements
1.81
From P.S.G Data book, Pg.No. 7.68, corresponding to
Arc of contact, and V - Flat.
F d 0.85
Number of belts n
8.5 1.3
10.113 0.95 0.85
1.353 ~
2 belts
Step 7: Calculation of New centre distance
From PSG Data book Pg.No. 7.61, centre distance ‘C ’
CA
A2 B
where
A
D d
L
A
8
713.76 230
2901
8
4
354.6 mm
B
D d2
8
713.76 2302
8
29252.96 mm2
New centre distance ‘C ’
354.6
354.62 29252.96
665.22 mm
1.82
Design of Transmission Systems
Problem 1.17: Design a suitable V - Belt and design the drive
for a wet grinder. The power available from a 0.75 kW motor
running at 780 rpm. Drum speed is to be about 120 rpm. Drive
is to be compact.
Given Data
P 0.75 kW; N1 780 rpm; N 2 120 rpm
Solution
Step 1: Selection of cross-section of belt
Since the diameters of pulleys are not given they can
be assumed.
From P.S.G Data book, Pg.No. 7.58, for the power
0.75 kW, “A” type belt may be selected. For “A” type belt,
minimum pulley pitch diameter dmin = 75 mm; Normal top
width w = 13 mm;
Nominal thickness T = 8 mm; weight of metre =
0.106 kg f.
Step 2: Selection of diameters
From PSG Data book, Pg.No.7.62,
Equivalent pitch diameter de dp F b
(or)
de max dp max F b max
From P.S.G Data book, Pg.No. 7.62, corresponding to
“A” type belt
de
max
125 mm
and corresponding to
D
ratio,
d
Design of Flexible Elements
1.83
F b max 1.14
dp max
de
max
Fb max
125
109.64 mm
1.14
Therefore diameter of smaller pulley d or driver
pulley should be between 75 mm to 109.64 mm
Hence let the diameter of driver pulley
d = 100 mm
From P.S.G Data book, Pg.No. 7.61,
Diameter of larger pulley D d
N1
N2
where
N 1 rpm of smaller pulley (Driver pulley)
and
N 2 rpm of larger pulley (Driven pulley)
and 0.98 (assumed)
D 100
780
0.98
120
637 mm
Step 3: Determination of centre distance
From P.S.G Data book, Pg.No. 7.61
i
D 637
6.37
d 100
From P.S.G Data book, Pg.No. 7.61, corresponding to
C 6.37,
1.84
Design of Transmission Systems
C
0.85
D
C 0.85 637
C 541.45 mm
From P.S.G Data book, Pg.No. 7.58,
C min 0.55 D d t
0.55 637 100 8
413.35 mm
C max 2 D d
2 637 100
1474 mm
Since the calculated ‘C ’ = 541.45 mm, is between
C m in and C max, the calculated centre distance is correct.
Step 4: Nominal pitch length of belt L
From P.S.G Data book, Pg.No. 7.61,
L 2C
D d2
D d
4C
2
2 541.45
637 1002
637 100
2
4 541.45
2373.72 mm
From P.S.G Data book, Pg.No. 7.60, corresponding to
cross-section “A”
Nominal pitch length L 2703 mm,
The corresponding nominal Inside length = 2667 mm.
Design of Flexible Elements
1.85
Step 5: Calculation of Design power
From P.S.G Data book, Pg.No. 7.62, corresponding to
belt cross-section symbol “A”.
19.62
0.765 10 4 S 2 S
kw 0.45 S 0.09
de
Since S belt speed
d N1
60
0.100 780
60
4.084 m/s
From P.S.G Data book, Pg.No. 7.62
de dp Fb
100 1.14
114 mm de max 125 mm
19.62
0.09
4
2
0.765 10 4.084 4.084
kw 0.45 4.084
114
0.911 kW
Step 6: Number of belts
From P.S.G Data book, Pg.No. 7.70,
Number of belts
Power
P Fa
kw F c F d
P 0.75 kW given
From P.S.G Data book, Pg.No. 7.69
Assuming medium duty service and upto 10 hr service
F a 1.1
1.86
Design of Transmission Systems
From P.S.G Data book, Pg.No. 7.60, corresponding to
belt cross-section “A” and Nominal inside length = 2667
mm.
F c 1.1
From P.S.G Data book, Pg.No. 7.68,
Dd
Arc of contact 180
60
C
637 100
180
60
541.45
120.49
From P.S.G Data book, Pg.No. 7.68, corresponding to
Arc of contact, and V - Flat
F d 0.83
Number of belts n
0.75 1.1
0.911 1.1 0.83
0.9918 ~
1 belt
Step 7: Calculation of New centre distance
From PSG Data book, Pg.No. 7.61,
A2 B
Centre distance ‘C ’ A
where A
L D d
8
4
2703 637 100
8
4
386.33 mm
Design of Flexible Elements
and B
1.87
D d2
8
637 100 2
8
36046.12 mm 2
New centre distance ‘C’
386.33
386.332 36046.12
722.78 mm
Problem 1.8: Design a V-belt from an electric motor to the
flywheel of a forging press from the following data. Motor
power 80 kW. During operation the motor is overloaded, the
overload factor being 1.5. Rated speed of motor is 720 rpm
and The required speed of the press flywheel is 300 rpm. The
flywheel with diameter of 1500 mm is preferably used as a
driven pulley. The distance between the areas of the flywheel
and motor pulley can be about 1650 mm.
[May 2011]
Given data
P 80 kW; N 1 720 rp m; N2 300 rpm ; D 1500 mm ;
C 1650 mm, Over load factor F a 1.5
Solution
Step 1: Selection of cross-section of belt
From PSG Data book, Pg.No. 7.58, for the power 80
kW, “D” type belt may be selected.
For “D” type belt, minimum pulley pitch diameter
d min 355 mm; Nominal top width w 32 mm; Nominal
thickness T 19 mm; weight per metre = 0.596 kg f.
1.88
Design of Transmission Systems
Step 2: Calculation of diameters
From P.S.G Data book, Pg.No. 7.61,
Diameter of larger pulley D d
N1
N2
where n 1 rpm of smaller pulley (Driver pulley)
n 2 rpm of larger pulley (Driven pulley)
and 0.98 (assumed)
dD
N2 1
N1
1500
300
1
720 0.98
637.75 mm
Step 3: Nominal pitch length of belt L
From P.S.G Data book, Pg.No. 7.61,
L 2C
D d2
D d
4C
2
2 1650
1500 637.752
1500 637.75
2
4 1650
L 6770.6 mm
From P.S.G Data book, Pg.No. 7.60, corresponding to
belt cross-section symbol “D ”
Nominal pitch length L 6886 mm
The corresponding nominal inside length = 6807 mm
Design of Flexible Elements
1.89
Step 4: Calculation of design power
From P.S.G Data book, Pg.No.7.62, corresponding to
belt cross-section symbol “D ”
506.7
4.78 10 4 S 2 S
kw 3.22 S 0.09
de
Since S belt speed
dN 1
60
0.6377 720
60
24.04 m/s
From P.S.G Data book, Pg.No. 7.62
de dp Fb
637.75 1.13
720.657 mm
D
. .
[ . F b 1.13 corresponding to
ratio from PSG Data
d
book Pg.No. 7.62]
506.7
0.09
4
2
4.78 10 [24.04 ] 24.04
kw 3.22 24.04
720.657
34.6 kW
Step 5: Number of belts
From PSG Data book, Pg.No. 7.70,
Number of belts n
P Fa
kW F c F d
Power P 80 kW (given)
1.90
Design of Transmission Systems
From P.S.G Data book, Pg.No. 7.60, corresponding to
belt cross-section “A” and Nominal inside length 6807 mm.
F c 1.1
From P.S.G Data book, Pg.No. 7.68
Dd
Arc of contact 180
60
C
1500 637.75
180
60
1650
148.64
From P.S.G Data book, Pg.No. 7.68, corresponding to
Arc of contact, and V - Flat
F d 0.82
Number of belts =
80 1.5
34.6 1.1 0.82
4
belts 3.84 ~
Step 7: Calculation of new centre distance
From P.S.G Data book, Pg.No. 7.61,
A2 B
Centre distance ‘C’ A
where
A
L D d
A
8
6886 1500 637.5
8
4
882.2 mm
and
D d 2
B
8
Design of Flexible Elements
1.91
1500 637.5 2
8
92934.3 mm 2
C 882
882 2 92934.3
1709.6 mm
1.3. DESIGN OF WIRE ROPES
1.3.1 WIRE ROPES
When a large amount of power is to be transmitted
over a long distance (up to 150 meters) from one pulley to
another pulley, then wire ropes are used.
Wire ropes are used for hoisting and hauling
purposes, example: elevators, mine hoist, cranes, conveyors,
etc.
Wire ropes are made from cold drawn wires to
increase strength and durability. The various materials
used for wire ropes are wrought iron, cast steel and alloy
steel.
1.3.2 Advantages of wire ropes
1. Wire ropes are light in weight
2. They offer silent operation.
3. They can withstand shock loads
4. They are more reliable
5. They do not fail suddenly
6. They are more durable, low cost and high efficient
when compared to fibre ropes.
1.92
Design of Transmission Systems
1.3.3 Disadvantages of wire ropes
1. Not suitable for low power transmission.
2. It cannot be employed for short centre distance.
3. High manufacturing cost.
4. High Maintenance cost.
5. Should be kept away from electrical power, to
prevent current leakage through them.
6. It should be kept away from corrosive environment.
1.3.4 Construction of Wire rope
The wires are initially heat treated and cold drawn
during stage in order to have high strength and durability.
The wires are first twisted into a strand and then a
number of strands are twisted about a core to form the
rope as shown in the Fig. 1.11 (a), (b).
dw
d
S tran d
Fig. 1.11(a)
C o re
6x7 w ire rop e
R
R o pe
R1
R1
2
Fig. 11.11(b)
C ross-sectio n o f a rop e.
Design of Flexible Elements
1.93
The number of wires in each strand is generally 7,
19 or 37 and number of strands is usually 6.
1.3.5 Designation of wire ropes
The wire ropes are designated by the number of
strands and the number of wires in each strand.
For example, a wire rope having six strands and
seven wires in each strand is designated by 6 7 rope.
1.3.6 Classification of wire ropes
Wire ropes are classified based on
(a) Number of strand and number of wire in each
strands
(i) 6 7 ropes
(ii) 6 19 ropes
(iii) 6 37 ropes
(iv) 8 19 ropes
(b) Direction of twist of wire and strand as
(i) Cross-lay ropes
(ii) Parallel-lay ropes
(iii) Composite-lay ropes
(c) Direction of strand bending
(i) Right hand lay
(ii) Left hand lay
(d) Usage
(i) Running ropes
(ii) Stationary ropes
1.94
Design of Transmission Systems
Left Hand Lay
Parallel Lay Ropes
Cross Lay Ropes
Righ t Hand Lay
Steel Wire Ropes of Various Constructions
Com posite Lay Ropes
Fig.1.12. Types o f W ire - R opes.
(iii) Track ropes
(iv) Wire ropes slings
Stress in Wire Ropes
(i) Direct stress
The stress induced due to the weight of the load to
be lifted, weight of the rope etc.
d
W Wr
A
Where W weight of the load to be lifted
... (1)
Design of Flexible Elements
1.95
W r weight of the rope
A cross sectio na l area of the ropes
(ii) Bending stress
The stress induced in the rope as it passes over a
sheave or drum. It is directly proportional to the wire
diameter and inversely proportional to the diameter of the
sheave.
b Er
dw
D
... (2)
Where, E r Young’s modulus of the entire rope
0.8 10 5 N mm 2 or
Er
3
E
8
E Young’s modulus of the wire material
dw wire diameter
D s heave diameter
(iii) Stress due to acceleration
The stress induced due to the acceleration which is
changed due to speed of hoising. It is not due to starting
or stopping acceleration.
W Wr a
a
g
A
where a acceleration of rope and load during hoisting
V2 V1
t
... (3)
1.96
Design of Transmission Systems
(Speed of the rope changes from V 1 to V2 in t sections)
(iv) Stresses during starting
During starting, the load is given some acceleration
which induces addition at stress in the rope.
s 2 d 4
(If there is no slack in the rope)
If there is slack in the rope before starting, which
result impact load in the rope then,
W Wr
1
s
A
2as h E r
1
d l g
... (5)
where, h slack during starting
l length of the rope.
as acceleration during starting stopping
(v) Effective stress
The sum of direct stress d and the bending stress
b is called the effective stress in the rope.
The effective stress in the rope during normal
working
ne d b
The effective stress during the acceleratio n of the load
ae d b a
The effective stress during starting se s b
Design of Flexible Elements
1.97
1.3.7 Failures of wire rope
Wire rope failure may be caused by the following
reasons
(a) Work at overloads.
(b) Wear and corrosion due to poor maintenance.
(c) Due correct selection of drum and rope diameter.
(d) Incorrect winding of drum.
(e) High dynamic impact.
1.3.8 Design procedure for wire rope
1. Selection of suitable wire rope
Select a suitable wire rope based upon it usage from
the table.
6 17 rope
used
in
wires,
transmission
tramways,
power
6 19 rope
used in cranes, derricks, dredges, elevators
6 37 rope
used in steel mill ladles, cranes, high speed
elevators
8 19 rope
used as extra flexible hoisting rope
2. Calculation of design load
Design load = load to be lifted Assumed factor of
safety n
Refer PSG data book Pg.No. 9.1
Assume factor of safety 1 to 1.6 times the factor of
safety given in data book, it is because of duty factor.
Refer PSG data book Pg.No. 9.2
1.98
Design of Transmission Systems
3. Selection of wire rope diameter d
Select a suitable diameter from the table.
Refer PSG Data book Pg.No. 9.4, 9.5 and 9.6
4. Calculation of shear diameter D
Refer PSG data book Pg.No. 9.1
Always larger shear diameter is preferred.
5. Selection of Area of useful cross-section of rope
A
Refer Pg.No. 9.1 (PSG data book)
A 0.4
T 2
d
4
6. Calculation of wire diameter d w
dw
d
i
1.5
where i Number of wire in the rope
Number of strands
Number of wire in each
strand
7. Selection of weight of rope w r
Refer PSG data book Pg.No. 9.4, 9.5 and 9.6
8. Calculation of various loads
(i) Direct load W d W W r
(ii) Bending load W b b A
Er
dw
A
D
Design of Flexible Elements
1.99
(iii) Acceleration load W a
W Wr
Wa
a
g
where a
v2 v1
2
(when speed of rope changes from v1 to v2 in t seconds)
(iv) Starting on sloping load
(a) When no slack in rope
starting load W st 2 W d
2 W W r
(b) When there is slack
starting load W st st A
W W r
1
2ash E r
d l g
9. Calculation of effective load
(i) Effective load during normal work
Wen W d W b
(ii) Effective load during starting
Wse W b W s
(iii) Effective load during acceleration
Wae W d W b Wa
10. Calculation of working factor of safety FOS w
FOSw
Breaking load
Effective load durin g a cceleration
1.100
Design of Transmission Systems
For Breaking load, refer PSG data book Pg.No. 9.4,
9.5 and 9.6
11. Checking of safe design
12. Calculation of Number of ropes
Number of ropes
Re commended factor of safety n
Working factor of safety FOSw
Problem 1.19: A workshop crane is required to lift a load of
30 kN using a wire rope and hook. The hook weighs 15 kN.
The diameter of rope drum is 30 times than that of the wire
rope. The load is to be lifted with an acceleration of
1m sec2. Calculate the diameter of rope. Factor of safety is 6.
Young’s modulus of wire rope is 80 kN mm2. Ultimate stress
is 180 kN cm2. The cross sectional area of the wire rope is 0.4
times the square of the wire rope diameter.
(Oct. ’96, May/June 2013)
W 1 weight of the load to be lifted 30 kN
W 2 weight of the crane hook 15 kN
Direct load or Dead weight on the rope
W d W1 W 2
30 15 45 kN 45 103 N
Ultimate stress 180 kN cm2
180 10 3
2
10
1800 N mm2
Design of Flexible Elements
1.101
Young modulus E r 80 kN mm2 80 10 3 N mm2
D diameter of rope drum 30 d
where d d ia o f w ire rope
a 1 m sec 2; FOS 6; as 0.4 d2
Design load Factor of safety Dead weight on the rope
6 45
270 kN
Since the rope is used in crane, select 6 19 rope
dW
d
1.5
i
d
6 19
1.5
0.0624 d
Bending load on the rope W b
Er dW
D
A
80 10 3 0.0624 d
0.4d 2
30 d
66.56 d2 N
Load on the rope due to acceleration W a
Wd
g
a
45 10 3
1
9.81
4587.15 N
Total load acting on the rope W d W b W a
45 103 66.56 d 2 4597.15
... (1)
1.102
Design of Transmission Systems
Total load on the rope
Area of wire rope Allowable stress
A
u
FOS
0.4 d2
1800
6
120 d2
... (2)
Equate the equations (1) and (2)
45 10 3 66.56 d2 4587 120d2
120 d 2 66.56 d 2 49,587
d2
49,587
53.44
d 30.46 mm
From table, Refer PSG data book Page No. 9.5
standard diameter of wire 32 mm
Problem 1.20: Select a wire rope for a vertical mine hoist to
lift a load of 55 kN from a depth of 350 meters. A rope speed
of 600 m/min is to be attained in 20 seconds.
Solution
Given data:
W 55 kN 55 10 3 N ; depth 350 metre ; v 600 m min;
t 20 seconds
1. Selection of wire rope for a vertical mine hoist.
From
6 19 ro pe;
PSG
databook,
Page
No.
9.1
select
2. Factor of safety
n n duty facto r
Refer PSG Data book Pg. No.9.1
Design of Flexible Elements
1.103
For mining installations n 10 and duty factor
1.6
refer P.No.9.2
(assume mechanism class 4)
n 10 1.6 16
Design load for the wire rope
16 55 10 3 880 103 N 89.73 tonnes
From PSG databook P.No. 9.5.
For nominal breaking strength of 90.4 tonnes and
tensile strength of 160 to 175 kg f mm 2, the diameter of
rope is 41 mm.
Select diameter of rope as d 41 mm
Approximate weight w 6.37 kg f m ; (Assume)
d ep th 350 m
6.37 350 2229.5 kg f
w 22295 N
dw dia of wire
d
1.5
i
41
6 19
1.5
3. Diameter of sheave: (D)
Refer PSG data book page No. 9.1,
Min
D
100
d
D 100 d 100 41 4100 mm
2.56 mm
1.104
Design of Transmission Systems
Bending stress
E r dW
D
0.8 10 5 2.56
4100
b 49.95 N mm 2
Take E r 0.8 10 5 N mm2 (Assume)
Equivalent bending load on the rope W b b A
49.95 528.1 26.378 kN
A 0.4
d2
4
0.4
41 2
4
528.1 mm 2
4. Acceleration of the rope and load:
a
600
V
60t 60 20
0.5 m sec 2
Additional load due to acceleration W a
Ww
a
g
55 10 3 22295
0.5
9.81
3939.6 N
5. Effective load on the rope during acceleration of
the load
W w Wb Wa
55 10 3 22295 26.378 10 3 3939.6
107.6126 10 3 N
Design of Flexible Elements
1.105
Actual factor of safety during acceleration of the
load
880 10 3
107.6126 10 3
8.177 16 Design factor of safety
6. Effective load on the rope during normal working
W w Wb
55 10 3 22295 26.378 10 3
103.673 10 3 N
Actual factor of safety during normal working
880 10 3
103.673 10 3
8.488 16
8.488 16 des ign fa ctor of safety
Therefore, the design is satisfactory.
Problem 1.21: Select a wire rope from a 6 37 group to lift
a maximum load of 10 kN through a height of 60 m. The
weight of bucket is 2 kN. Maximum lifting speed is 2 m/s
which is attained in 3 seconds. Drum diameter is 30 times the
rope diameter. Factor of safety is 6.
(Anna University, May 2010)
Solution
Given
W 1 weight of load to be lifted = 10 kN
W 2 weight of bucket = 2 kN
Direct load (or) Dead weight on the rope W d
1.106
Design of Transmission Systems
W d W1 W 2
W d 10 kN 2 kN 12 kN 12 10 3 N
D Diameter of rope drum 30 d
F os 6 (since the load applied on the rope during
starting and acceleration is more than two times the
weight)
Rope Type 6 37 ropes
Maximum speed v 2 m/s
Time = 3 seconds
i 6 37 type
1. Design load P d F os 3 Dead weight on rope
P d 3 6 12
P d 3 72 kN
P d 216 10 3 N
Ultimate stress 1700 N/mm2 (Assumed)
2. Area of rope A
Design load
Ultima te stress
216 10 3 N
1700 N/mm 2
A 127 mm 2
Diameter of rope is determined by using
A 0.4 d2
Design of Flexible Elements
d
1.107
A
0.4
0.4
127
17.8 mm
Next standard diameter of rope d 18
(Refer PSG data book Pg.No. 9.4, for 6 37 ropes)
Approximate weight w 6.37 k gf/m
w 6.37 kg f/m 63.7 N/m
dia of wire d w
d
1.5
i
18
6 37
1.5
0.8053 mm
3. Diameter of sheave
Refer PSG data book Pg.No. 9.1
D
100
d
D 100 d 100 18
1800 mm
Take E r 0.8 10 5 N/mm 2 (Assumed)
Bending stress
Er dw
D
0.8 10 5 0.8053
1800
1.108
Design of Transmission Systems
b 35.79 N/mm2
Equivalent bending load on the rope
wb b A
w.k.t
A 0.4
d2
4
0.4
182
4
101.78 mm 2
w b 35.79 101.78 N
3642.7 N
3.6427 kN
4. Acceleration of rope and load
a
v 2
t 3
0.66 m/s 2
load due to acceleration w a
wa
Ww
a
g
10 10 3 63.7
0.66
9.81
w a 677.06 N
Design of Flexible Elements
1.109
5. Effective load on rope during acceleration of load
W w wb w a
10 10 3 63.7 3.64 10 3 677.06
14382.7 N
14.3827 10 3 N
Actual factor of safety during acceleration of load
216 10 3 N
14.3827 10 3 N
15.01 18
(Design factor of safety)
6. Effective load on the rope during normal working
W w wb
10 10 3 63.7 3.642 10 3
13.7057 10 3 N
Actual factor of safety during normal working
216 10 3 N
13.7057 10 3 N
15.75 18
(design factor of safety)
The design is satisfactory.
Problem 1.22: A crane is lifting a load of 18 kN through a
wire rope and a hook. The weight of the hook etc., is 10 kN.
The load is to be lifted with an acceleration of 1 m/sec2.
Calculate the diameter of the wire rope. The rope drum
diameter may be taken as 30 times the diameter of rope. Take
a factor of safety of 6 and young’s modulus for the wire rope
Design of Transmission Systems
1.110
0.8 105 N/mm2.
The
ultimate
stress
may
be
taken
2
as
1800 N/mm . The cross-sectional area of the wire rope may be
taken as 0.38 times the square of the wire rope diameter.
Solution
Given
W 1 Weight of the load to be lifted 18 kN
W 2 Weight of crane hook 10 kN
Direct load (or) Dead weight on the rope Wd
W1 W2
18 10 28 kN 28 10 3 N
Ultimate stress u 1800 N/mm 2
Young Modulus E r 0.8 10 5 80 10 3 N/mm 2
D diameter of rope drum
30 d
where d diameter of wire rope
a 1 m /s 2; F.O.S 6; as 0.38 d2
where as crosssectional area of wire rope
a acceleration
Design Load Pd
Factor of safety Dead weight on th e rope
6 28
168 kN
Design of Flexible Elements
1.111
Since the rope is used in crane, from P.S.G. Data
book, Pg.No. 9.1, select 6 19 rope
The diameter of wire
dW
d
d
0.0624 d
i 1.5
1.5
6 19
Bending load on rope
W b
Wb
E r dW
D
as
80 10 3 0.0624 d
0.38 d 2
30 d
63.232 d2 N
Load on the rope due to acceleration
Wa
Wd
g
a
28 103
1
9.81
2854.23 N
Total load acting on the rope
Wd Wb Wa
28 10 3 63.232 d2 2854.23
... (1)
Total load on the rope
Area of wire rope Allowable stress
as
u
FOS
0.38 d 2
1800
6
114 d 2
Equate the equations (1) and (2)
... (2)
1.112
Design of Transmission Systems
28 10 3 63.271 d2 2854.23 114 d2
30,854.23 50.729 d2
d 24.66 mm
From table, Refer P.S.G. Data book, Pg.No. 9.5,
standard diameter of rope 25 mm
Problem 1.23: A 6 19 wire with a tensile designation 1120
is used to raise a load. The nominal diameter of the wire rope
and the sheave diameter are 15 and 400 mm respectively.
Assuming long life on the basis of fatigue consideration
determine the maximum load that the wire rope can carry.
Solution
Given that
i 6 19 wire rope
Tensile designation 1120 means v 1120 N/mm2
d 15 mm
D 400 mm
W max to be found out.
w.k.t
p
0.0012
v
Refer PSG data book Pg.No. 9.2 (Graph)
P 0.0012 v
P 0.0012 1120
P 1.344 N /mm 2
Design of Flexible Elements
Also w.k.t P
1.113
2Wmax
dD
(Refer PSG Data book Pg.No. 9.2)
W max
P d D 1.344 15 400
2
2
W max 4032 N Ans.
1.3.9 Design of wire rope sheaves
Performance of wire rope in a machine is affected by
the design of its sheaves and drum.
The Bending stress induced in the wire rope.
b Er
dw
D
So, the bending stress induced in the rope is inversely
proportional to the diameter of the sheave.
Its diameter should be large enough to reduce the
bending stress in the rope. It also provides better and more
economical service.
Narrowing sheaves will crush the rope and damage.
G ro ove D ia m e te r
R o pe D ia m eter
Sh eave G roo ve
w ith Too M uch
C learanc e
G ro ove D ia m e te r
R o pe D ia m eter
G ro ove D ia m e te r
Sh eave G roo ve
w ith Too Little
C learanc e
Sh eave G roo ve
w ith Corre ct
C learanc e
Fig.1.13
R o pe D ia m eter
1.114
Design of Transmission Systems
Sheave materials
Cast iron sheaves are employed in light and medium
service where as steel castings are often employed for heavy
service.
The cross-section of standard sheave grooves for wire
ropes are given in the data book (Refer PSG Data book
Pg.No. 9.10)
For various proportion of sheave groove, Refer PSG
data book Pg.No. 9.10.
1.3.10 Design of wire rope drums
In industries and other practical field, more than one
wire rope is being used, therefore one has to use rope drum
to enable the rope to be wound in multiple layers.
The drum is selected similarly the sheaves. Drums
for steel wire ropes are generally made up of cast iron.
The drum should be provided with helical grooves so
that the rope winds up uniformly and is less subjected to
wear. The helical grooves should be large enough to prevent
jamming of the rope.
1.3.11. For dimensions of the drum groove for wire
rope, refer PSG data book Pg.No. 9.9.
Problem 1.24: A 6 19 steel wire rope is used for the elevator
in the building. The weight is being lifted with a maximum
speed of 200 m/min. The weight of the elevator cage is 10 kN
and the weight of passengers is 9 kN. The lifting sheaves are
of the traction type. Design a suitable wire rope sheave. Take
FOS as 10.
Design of Flexible Elements
1.115
Solution
Given data
Wire Type 6 19 wire rope
v 200 m/min
W elevator 10 kN
W passenger 9 kN
FOS = 10
1. Calculate the rope diameter
To design a wire sheave, we have to find the rope
diameter first.
Total load W elevator W passenger
10 kN 9 kN
19 kN
Design load Total load FOS
19 10 190 kN
Taking the design load as breaking strength
refering PSG data book Pg.No. 9.6
The diameter of the rope is selected as 25 mm.
d 25 mm for v 1100 1250 N/mm2
and breaking strength = 190 kN
Calculation of sheave diameter
Refer PSG data book Pg.No. 9.1
For velocity upto 50 m/min
1.116
Design of Transmission Systems
D min/d 27
But lifting speed is 200 m/min, this ratio has to be
modified. For every additional speed of 50 m/min, D min/d
ratio has to be increased by 8%
Modified
D min
d
27 1.08 4 1
34
Diameter of sheave D 34 25
. . 200
. 50 4
850 mm
Design of wire rope sheave
Refer PSG Data book Pg.No. 9.10
Knowing the diameter and refering data book, the
proportions of sheave are given below
(i) a 65 mm;
(ii) b 50 mm;
(iii) c 10 mm;
(iv) e 1.5 mm;
(v) h 37.5 mm;
(vi) l 18 mm;
(vii) r 14.5 mm;
(viii) r1 5 mm;
(ix) r2 5 mm;
(x) r3 20 mm;
(xi) r4 15 mm;
Design of Flexible Elements
1.117
ADDITIONAL PROBLEMS
APRIL 1998:
Design a belt drive to transmit 22.5 kW at 740 rpm
to an aluminium-rolling machine. The speed ratio being 3.0
and the distance between the pulleys is 3 meter. Diameter
of the rolling machine pulleys is 1.2 meter. Take fabric belt
and cast iron pulley. Assume Co-efficient of friction
0.2, Permissible tension for 8 ply fabric belt = 12.5
kg/cm width. Take the length of the belt, 1% less to give
initial tension.
APRIL 2002:
Design a fabric belt to transmit 10 kW at 450 rpm
from an engine to a line shaft at 1200 rpm. The diameter
of the engine pulley is 600 mm and the distance of the
shaft from the engine is 2 meter.
OCTOBER 1996:
Design a chain drive to transmit 5 kW at 900 rpm
of sprocket pinion. The speed reduction is to be 2.5:1. The
driving motor is mounted on an adjustable base. Assume
that the load is steady, the drive is horizontal and the
service is 16 hours per day.
OCTOBER 2000:
Select a suitable deep groove ball bearing for a
drilling machine spindle of 40 mm diameter and suggest
necessary tolerances on the shaft and housing. Radial load
is 2.0 kN. Thrust is 1.5 kN. Spindle speed is 3000 rpm.
Desired life is 3000 hours.
1.118
Design of Transmission Systems
1.4. DESIGN OF CHAIN DRIVE
1.4.1 Chain Drives
A chain drive consists of two sprockets and an endless
chain. The chain is wrapped around two sprockets. The
chain consists of number of links made of plates, which are
connected by pin joints. The sprockets are made of special
profile toothed wheels.
D rive n S procket
D rive r S pro cket
C e ntre D istan ce
Fig.1.14. A. Typical Ch ain Drive.
1.4.2 Advantages:
1. Chain drives can be used for long or short center
distances.
2. From a single driving sprocket, a number of
shafts can be driven in the same or opposite
direction by means of a chain.
3. Chain drives are more compact.
4. The efficiency of chain drives is approximately
98% (higher than belt drives).
Design of Flexible Elements
1.119
5. There is no slip between sprocket and chain. (It
is a positive drive compared to the belt drive).
6. Chain drives require less maintenance, when
compared to belt drives.
1.4.3 Disadvantages
1. Periodic maintenance is required, particularly
lubrication and slack adjustment.
2. Noisy operation, when compared to belt drives.
3. Design is more complicated (sprocket design).
4. Chain drive is unsuitable where precise motions
is required due to polygonal effect and wear in
the joints.
1.4.4 Applications:
1. Transportation industry (Bicycles, motor cycles
and automobile vehicles, etc.)
2. Textile industry.
3. Building construction and material handling.
1.4.5 Types of chains:
The common types of chains are (a) Roller chain
(b) Bushed chain (c) Silent chain (or) inverted tooth chain
w
w
Db
G
Pt
Pt
Pt
Dr
DP
B ush C hain
R oller
C hain
A1
W
Sim p lex C h ain
Fig.1.15
A2
D up lex C hain
A3
Triplex C hain
1.120
Design of Transmission Systems
1.4.6 Components of Chain Drive
1. Chain
(a) Roller chain
It is a type of chain in which an alternate inner and
outer links are connected by hinged joints. Each joint
consists of a pin of diameter ‘D p’ pressed into the outer
plates and the dash is secured in the holes of the inner
plates.
The roller employed in the chain safeguards the
sprockets teeth against wear.
The projection area of the contact surface for such a
joint is given by
A Dp b
where b width of inner plates
(b) Bush chains
Bush chains differ from the roller chains in that they
have no rollers in it. Therefore they are lighter in weight,
but the absence of rollers increases the wear of teeth on
the sprockets because of the sliding friction between the
teeth and bushes.
(c) Silent or inverted chains
It is similar to the roller chain, with the sprockets
engaged by projection on the link side bars and series of
toothed plates are pinned together in rows across the width
of the chain.
Its structure is more intricate, it is more expensive
manufacturing and it requires good maintenance.
Design of Flexible Elements
1.121
2. Sprockets
A sprocket is a profiled wheel with teeth that mesh
with a chain. The name sprockets applies generally to any
wheel upon which are radial projections that engage a
chain passing over it.
The operating capacity of a chain drive depends upon
the quality of the sprockets. Generally sprockets are made
up of cast iron or hardened steel. Sprocket with small
radius is termed as pinion-sprocket and with large radius
is called wheel sprocket.
d Pitch circle diameter of sprocket
D rive D irection
p
sin /Z
p
sin 180/ Z
O utside Diam eter
Pitch Circle
D riving Diam eter
C learance for
Belt U nderside
+
Fig.1.16 S procket
1.122
Design of Transmission Systems
P = P itch of C hain
Z = N um ber of Te eth
P
Dr
1 80
2 = Z
r
2
=
3 60
Z
2
o
d
2
o
d = Pitch C ircle D ia m eter of Sp rocket =
p
sin ( /2)
p
o
sin (1 80 /z)
Fig.1.17. Action of C hain E ngaging Spro cket Teeth.
The Fig. 1.17 represents the action of chain engaging
sprocket teeth.
3. Chain housing
It is a pointing made up of thin sheet, provided to
prevent the chain drive from dust and dirt. It also dampers
the noise of the drive and pressure grease.
4. Slack adjuster
It is a movable bearing to regulate the chain slag and
maintain required tension in the drive. The bearings are
in the form of slides in which sprocket shaft is installed.
1.4.7 Design Procedure
Step 1
Calculate transmission ratio
i
Z2
Z1
n1
n2
Design of Flexible Elements
1.123
Z 1 No. of teeth on sprocket pinion (Driver)
Z 2 No. of teeth on sprocket wheel (Driven)
n1 Speed of rotation of pinion in rpm.
n2 Speed of rotation of wheel in rpm.
Step 2
(a) Select the no. of teeth on sprocket pinion Z 1
from databook Page
transmission ratio (i)
No.
7.74
based
on
(b) Calculate the No. of teeth on sprocket wheel
Z 2
Since i
Z2
Z1
Z 2 iZ 1
Z min 7 teeth
Z max 100 to 120 tee th
For uniform wear, select odd no. of teeth on driver
and even no. of teeth on driven.
Step 3
Calculate of pitch p
Refer databook Page No. 7.74
Optimum centre distance a 30 to 50 p
i.e.,
pmax
a
30
1.124
Design of Transmission Systems
pmin
a
50
Select the standard pitch from databook 7.71, 7.72 & 7.73
The
selected
standard
pitch
must
be
within
pmax and pmin .
The standard pitches are
6.0 mm
8.0 mm
25.40 mm
31.75 mm
9.525 mm
38.10 mm
12.7 mm
44.45 mm
15.875 mm
50.8 mm
19.05 mm,
Step 4
Select chain No., according to the selected standard
pitch.
(PSG Data book page No. 7.71, 7.72 and 7.73)
Take the following values according to the selected
chain No.
Simplex - R
Duplex - DR
Triplex - TR
(1) Bearing area in cm 2 A
(2) Weight per meter in kg f W
(3) Breaking load in kg f Q
Design of Flexible Elements
1.125
Step 5
Refer PSG databook, Page No. 7.77.
Checking of breaking load Q in kg f
Power transmitted on the basis of Breaking load
N
Qv
in kw
102 n K s
N given power in kW.
Q induced breaking load (to be calculated)
v chain velocity in m/sec.
ZpN
m /sec.
60 1000
p pitch in m m
N 1 N Speed o f pinion in rpm
z Z no. of teeth on pinion
n factor of safety allowable
Refer databook Page No. 7.77
The value of n depends on
1. speed of rotation of pinion
2. pitch in mm
ks Service factor
Refer PSG databook Page No. 7.76 and 7.77
k1 k2 k3 k4 k5 k6
1.126
Design of Transmission Systems
The
service
factor
depends on six factors
ks
k 1 to k6
According to the given conditions, take the values of
k 1, k2, k 3, k4, k 5 and k6 and Calculate K s.
Note: If conditions are not given, select K s 1
(by assuming K1 K2 K3 K4 K5 K6 1
Substitute all the values in the equation
N
Qv
Calculate Q
102 n K s
Q [Q] then design is safe.
If Q [Q] then change the chain no. and read the
values of A, W and [Q] and check again Q breaking load.
Step 6
Check the Actual factor of safety.
Refer PSG data book Page No. 7.78.
[n]
Q
P
[n] actual Fos n allowable factor o f safety
Q Breaking load of chain in kgf
P P t P c Ps
P t Tangential force due to power transm ission
Pt
102 N
kg f
V
Design of Flexible Elements
1.127
P t C entrifugal tension
Pc
W v2
kg f
g
N P ower in kW given
v C hain velocity in m/sec
W W eight/m length of chain kgf
g 9.81 m/sec 2
P s Tension due to sagging of chain:
K Coefficient of sag
Ps K W a
(refer PSG Data book page No.
7.78)
value of K depends on position of
chain drive
W Weight/m length of chain kgf
a Centre distance in meter
To Find ‘a’: Centre distance
1. To find length of chain
Refer PSG Data book Page No. 7.75
lp 2ap
Z1 Z2
2
Z2 Z1
2
ap
2
(no. of links)
(to be corrected to even no.)
Actual length of chain l lp p
1.128
Design of Transmission Systems
where ap
ao
p
ap Approximate centre distance
ao Initially assum ed centre dis tance
p Pitc h
2. To find exact centre distance
e
e2 8m
p
a
4
where e lp
Z2 Z1
m
2
Z1 Z2
2
2
The value of m can be
read directly from the
PSG data book. Page
No.7.76
The value of m depends
on Z 2 Z 1 value
Calculate Z 2 Z 1 and
take the corresponding
value of ‘m’.
Calculate exact centre distance ‘a’.
Ps K W a
where a centre dista nce in meters
K Coefficient. of sag
W Weight/m length
Calculate P and
[n]
Q
P
Design of Flexible Elements
1.129
[n] n
Then the design is satisfactory.
* If [n] n, then change the chain No. and repeat the
calculations and check again [n] and n
Step 7
Checking of bearing stress Refer PSG Data book,
Page No. 7.77
The allowable bearing pressure [] depends on
1. Pitch
2. Chain velocity
Read the value of [] in kgf/mm 2 and convert in
kg f /cm 2
kgf/mm 2 10 2 kg f/cm2
Power transmitted on the basis of allowable bearing
A v
stress N
102 K s
where N given power in kW
Induced bearing stress in kgf cm 2
A bearing Area cm 2
v Chain speed m/sec
K s service factor
Calculate induced stress in kgf cm 2
[]
Then the design is satisfactory.
1.130
Design of Transmission Systems
Step 8
Diameters of pinion and wheel d and D
Refer PSG data book Page No. 7.78
d
D
p
180
sin
Z1
d dia. of smaller sprocket
p
180
sin
Z2
D dia. of larger sprocket
1.4.8 Chordal action of a roller chain
Sprocket with less number of teeth can affect the
smooth running of a chain drive. This unsmooth running
condition is termed as chordal action of the chain.
When a chain roller approaches the sprocket and has
just seated, it has radius R c, also known as chordal radius.
When the roller passes through half of the pitch angle
, the roller has radius R which is the pitch radius.
R Rc
At N rpm, the chain velocity for pitch radius R is
2 RN and for chordal radius is 2 R c N.
Since the velocity R Rc, it is obvious that it is
undergoing from minimum to maximum velocity for every
rotation, which results in unsmooth running.
Chordal rise R is given by
R R Rc
Design of Flexible Elements
R R cos
1.131
2
R 1 cos
2
The rise can be reduced by increasing the number of
teeth z in the sprocket, because
360
z
1.4.9 DESIGN OF CHAIN DRIVES
Problem 1.25: Design a chain drive to operate a compressor
from a 15 kW electric motor at 900 rpm; The compressor is to
run at a speed of 300 rpm; The minimum centre distance
should be 550 mm.
Solution
Given Data:
Power of Motor P 15 kW
Speed of motor N 1 900 rpm
Speed of the compressorN 2 300 rpm ;
Minimum centre distance ao 550 mm;
Step 1: Calculation of transmission ratio
Tra ns mission ratio
Z2
Z1
i Transmission ratio
N1
N2
N1
N2
900
3
300
Step 2: From PSG Design data book, refer Page No. 7.74.
1.132
Design of Transmission Systems
For i 2 to 3 ; Z 1 25 to 27
i 3 to 4 ;
Z 1 23 to 25
Take Z 1 23 to 27 (select any odd no. of teeth)
Select Z 1 27 teeth (no. of teeth on sprocket pinion)
Z 2 i Z1 3 27 81
82 (no. of teeth on sprocket wheel)
Step 3: From PSG design data book, P.No.7.74
Optimum centre distance a 30 to 50 p
where a approximate centre distance
pitchmax pmax
550
18.33 mm
30
pitchmin pmin
550
11 mm
50
Select standard pitch from PSG data book,
Take any standard pitch between 11 to 18.33 mm
Select Pitch p 15.875 mm
Step 4: Selection of Chain No.
Select roller chain from PSG Data book Page No. 7.72
The available chain No. are 10A and 10B
*
Select 10A-2 Duplex Chain.
Pitch p 15.875 mm
Corresponding to chain No. selected, take the values of
Design of Flexible Elements
1.133
A Bearing area 1.4 c m2
W Weight per m length 1.78 kgf
Q Breaking load 4440 kgf
Step 5: Calculate Power transmitted based on breaking
load:
From data book, Pg. No. 7.77
N
Qv
kW
102n Ks
From the above equation calculate ‘Q’ breaking load
by considering
N given power
N 15 kW
v
Z1 p N1
60 1000
27 15.875 900
60 1000
6.429 m/sec
n Minimum value of factor of safety
K s 1 ; Z1 15 to 30 from PSG data book, Pg. No. 7.77,
Select
n 11
for
a
pitch
15.875
mm
and
n 1 1000 rpm
Since the specific conditions are not given in the
problem, assume K 1 K 2 K 3 K 4 K5 K 6 1
Ks 1
15
Q 6.429
102 11 1
1.134
Design of Transmission Systems
Q
15 102 11 1
2617.825 kgf
6.429
Breaking load Q 2617.825 kgf which is less than the
selected chain Breaking load 4440 kgf
The selection of chain no. is satisfactory based on
breaking load.
Step 6
(a) Calculation of Length of chain
(b) Final centre distance.
(a) Length of continuous chain in multiples of pitches
lp 2ap
where ap
Z1 Z 2
2
Z2 Z1
2
2
ap
ao
p
550
34.64
15.875
34.64
ao initially assumed centre distance in mm
550 mm
p pitch 15.875 mm
No. of teeth on sprocket wheel Z 2 82 ;
No. of teeth on sprocket pinion Z 1 27
Refer PSG data book Page No. 7.76,
Design of Flexible Elements
1.135
2
Z2 Z1
m
2
Read the value of ‘m’ directly from PSG data book
Pg.No. 7.63 Z 2 Z 1 82 27 55;
the value of m 76.6
lp 234.64
27 82
76.6
2
34.64
125.99
126 approximate d to 126
Length of chain l lp p
126 15.875 2000.25 mm
Take,
l 2000 mm
(b) Final centre distance
a
e
e2 8m
4
e lp
p
m 76.6 (from distance)
Z1 Z2
2
27 82
126
2
126
109
71.5 m.m
2
Final centre distance
a
71.5 2 8 76.6
71.5
a 549.98
a 550 mm
4
15.875
1.136
Design of Transmission Systems
Step 7: Check the actual factor of safety.
From PSG databook, Refer P.No. 7.78
Actual factor of safety [n]
Q
P
Q Breaking load of the chain 4440 kg
P P t Ps Pc
P t Tangential force due to power Transmission
Pt
102 15
6.429
N 15 kW
v 6.429 m/sec
237.98 kg f
P c Centrifugal fus ion
W v2
g
1.78 6.429 2
9.81
7.499 kg f
W 1.78 kg f
P s tension due to slagging kWa metres
6 1.78
550
1000
5.874 kg
K Coefficient of Sag from PSG data book 7.78
6 (Horizontal)
a 550 mm 0.55 m
P 237.98 7.499 5.874
251.353 kgf
102 N
v
Design of Flexible Elements
[n]
1.137
Q
4440
P 251.353
17.66 11
which is greater than allowable factor of safety
The design is safe.
Step 8: Checking of Allowable Bearing Stress
From PSG data book, Pg.No. 7.77
The allowable bearing stress 2.24 kg f/mm2
(for a pitch of 15.875 and speed 1000 rpm )
Refer PSG data book, from Pg. no. 7.77
Power transmitted on the basis of allowable bearing
stress
N
15
Av
kW
102 Ks
1.4 6.429
102 1
169.98 kgf/cm 2
N 15 kW
or
A 1.4 cm 2
1.69 kgf/mm 2
v 6.429 m/sec
[]
Ks 1
2.24 kg f/mm 2
Therefore the design is safe.
1.138
Design of Transmission Systems
Step 9: Pitch dia. of small sprocket d
p
180
sin
Z1
15.875
180
sin
27
136.74 mm
Pitch dia. of large sprocket
D
p
180
sin
Z2
15.875
180
sin
82
414.46 mm
Problem 1.26: A 600 rpm blower is to be driven by a 10 kW
1440 rpm motor approximately 750 mm away. Design a
suitable chain drive.
(May/June 2011)
Given Data:
Power 10 kW 10 10 3 W atts:
Speed of motor N 1 1440 rpm; speed of blower 600 rpm
Approximate centre distance 750 mm
Step 1: Calculation of transmission ratio (i)
Transmission ratio i
i
Z2
Z1
N1
N2
1440
2.4
600
Design of Flexible Elements
1.139
Step 2: From PSG Design data book, Page No. 7.74
For i 2 to 3; Z 1 no. of teeth on pinion 25 to 27
Take Z 1 27 teeth
Z 2 no.of teeth on wheel i Z 1
Z 2 2.4 27 64.8
Take Z 2 66 teeth
Step 3: From PSG design data book Page No.7.74
Optimum centre distance a 30 p to 50 p
where p pitch
Pitchmax P max
750
25 mm
30
Pitchmax P min
750
15 mm
50
Select standard pitch from PSG databook, Pg.No.
7.72
Take standard pitch from PSG databook, between 15
mm to 25 mm
Select Pitch 19.05 mm
Step 4: Selection of chain No.
Select roller chain (from Pg. No. 7.72) from the
available chain No.
Select chain No. 12A-1 (simpler roller chain)
p pitch 19.05 mm
Bearing Area A 1.05 cm 2;
1.140
Design of Transmission Systems
weight per meter W 1.47 kg f
Breaking load Q 3200 kg f
Step 5: Calculate power transmitted on breaking load from
databook, Page No. 7.77
N
Q.V
kW
102. n ks
From the above equation, calculate ‘Q’ breaking load
by using N given power in kW.
N 10 kW; V
p Z 1 N1
60 1000
19.05 27 1440
12.34 m sec
60 1000
n Minimum value of factor of safety
From PSG databook, Page No. 7.77
Select n 13.2
Since the specific conditions are not given, assume
K1 K2 K3 K4 K5 K6 1
KS 1
10
Q
Q 12.34
102 13.2 1
102 13.2 1 10
1091.08 kgf
12.34
Breaking load Q 1091.08 kgf, which is less then the
selected chain, breaking load of 3200 kg f.
Design of Flexible Elements
1.141
Step 6
(a) Calculation of Length of chain, and
(b) Final centre distance
Z2 Z1
Z
Z
2
a L ength of co ntinuous chain
1
2
l
2a
p
p
ap
in multiples of pitches
2
lp 2 39.37
66 27
38.5
39.37
2
126.217 m
128 mm approximate links
Where ap
ao
p
ao initially assumed center distance 750 mm
ap
750
39.37
19.05
(b) Finalc entredistanc e a
a
e
e2 8m
p
4
81.5 2 8 38.5
81.5
4
767.18 mm
e lp
Z1 Z2
128
2
66 27
81.5
2
19.05
2
1.142
Design of Transmission Systems
Take a final centre distance 770 mm (rounded to
nearest value)
Step 7: Check the actual factor of safety
From PSG data book, Page No. 7.78
Actual factor of safety [n]
Q
P
Q breaking load of the chain 3200 kgf
P P t P S P C
P t tangential force due to power transmission
102 N
V
102 15
123.98 kg f
12.34
P C Centrifugal tension
W v2
g
1.47 12.342
9.81
22.818 kg f
P S tension due to slagging k.W.a
6 1.47 0.77 6.7914 kg f
P 123.98 22.818 6.7914
153.5894 kgf
K coefficient of sa g from PSG databook, P.No.7.78.
K 6 (Horizontal)
Design of Flexible Elements
1.143
a 770 mm 0.77 metre
Actual factor of safety [n]
3200
Q
P 153.5894
[n] 20.83 13.2
(Greater than allowable factor of safety)
Step 8: Checking of Allowable bearing stress:
Refer data, Page No. 7.77
The allowable bearing stress 1.85 kg f mm 2
Power transmitted on the basis of allowable bearing
Av
Stress N
kW
102 KS
10
1.05 12.34
102 1
N 10 kW
78.7219 kg f cm 2
A 1.05 cm 2
or
0.78721 9 kgf mm
2
v 12.34 m sec
KS 1
Which is less than allowable stress of 1.85 kg f mm 2
The design is satisfactory.
Problem 1.27: A truck equipped with a 8.5 kW engine uses
a roller chain as the final drive to the axle. The driving
sprocket runs at 900 rpm and the driven sprocket at 380 rpm,
with a centre distance of approximately 550 mm. Select roller
chain.
1.144
Design of Transmission Systems
Solution
Given data
N 8.5 kW
N 1 900 rpm
N 2 380 rpm
ao 550 mm
Step 1
Calculation of transmission ratio (i)
Transmission ratio i
i
Z2
Z1
N1
N2
900
380
2.368
Step 2
From PSG Data book Pg No. 7.74
For i 2 to 3
Z 1 no o f teeth o n pinio n = 25 to 27
Take Z 1 27 teeth
Z2 Z1 i
27 2.368
64.4
Take Z 2 66 teeth
Design of Flexible Elements
1.145
Step 3
From PSG design data book Pg.No. 7.74
Optimum centre distance a 30 p to 50 p
where p pitch
P max
a
550
18.33
30
30
P min
a
550
11
50
50
Select standard pitch for design data book Pg.No.
7.72
Take any standard pitch between 11 to 18.33 mm
select pitch p 15.875 mm
Step 4
Selection of chain
Select roller chain from PSG Data book Pg.No. 7.72
The available chain No are 10 A and 10 B.
Select 10 A - Z Duplex chain.
Now corresponding to chain No selected, take the
value of (PSG data book Pg.No. 7.72)
A Bearing area 1.4 c m2
W Weight per m length 1.78 kgf
Q Breaking load 440 kgf
Step 5
Calculate power transmitted based on breaking load.
1.146
Design of Transmission Systems
From PSG Data book Pg.No. 7.77
N
Q.v
kW
102. n.K s
From the above equation calculate ‘Q’ by considering
N (given power) = 8.5 kW
v
Z1 p N1
60 1000
27 15.875 900
60 1000
6.4293 m/sec
From PSG Data book Pg.No. 7.71
Select n 11 fo r pitc h = 15.875 and N 1 1000 rpm
K s 1 (Assume)
. .
since the specific condition is not given in
.
problem.
K s K 1 K 2 K3 K 4 K5 K 6 1
8.5
Q
Q 6.4293
102 11 1
8.5 102 11 1
6.4293
Q 1483.36 kg f
Breaking load Q 1483.36 kg f which is less than
the selected chain breaking load Q 4440 kg f
The Design is satisfactory based on breaking
Design of Flexible Elements
1.147
Step 6
(a) Calculation of length of chain
(b) Final centre distance
(a) Length of continuous chains in multiplies of
pitches
Z2 Z1
Z 1 Z2
2
L p 2ap
ap
2
where ap
ao
p
2
550
15.875
34.64
No of teeth on sprocket wheel Z 2 64
No of teeth on sprocket pinion Z 1 27
From PSG data book Pg.No. 7.76, take the value of
m for Z 2 Z 1 64 27 37
m 34.7
2
Z2 Z1
w.k.t
m 34.7
2
Lp 2 34.62
64 27
34.7
2
34.64
115.74 links
116 approximated to 116 link s
Length of chain l lp p
l 116 15.875
1.148
Design of Transmission Systems
l 1841.5 mm
Take,
l 1842 mm
(b) Final centre distance a
w here e lp
e2 8m
e
4
p
Z1 Z 2
2
116
64 27
2
70.5
a
70.52 8 34.7
70.5
4
15.875
a 551.66 mm
Take a 552 mm
Step 7
Check actual factor of safety
From PSG Data book Pg.No. 7.78
Actual factor of safety n
Q
P
Q Breaking load of the chain = 4440 kg
P Pt Ps Pc
P t Tangential force due to power transmission
102 N
v
Design of Flexible Elements
Pt
1.149
102 8.5
6.4293
P t 134.851
N 8.5 kW
v 6.4293 m/sec
P c Centrifugal function
W v2
g
W 1.78 kg f/m length
1.78 6.42932
9.81
7.5 kg f
P s tension due to slag = kWa meter
k 6 (Horizontal) from Pg.No. 7.78 PSG Data book
P s 6 1.78
550
1000
P s 5.874 kg f
P Pt Pc Ps
134.851 7.5 5.874 kg f
148.225 kg f
[n]
Q
P
4440
148.225
29.95 1 allowable FOS
The design is satisfactory.
1.150
Design of Transmission Systems
Step 8
Checking of Allowable Bearing stress
From PSG Data Book P.No. 7.77
The allowable stress for pitch of 15.875 and speed <
1000 rpm.
2.42 kg f/mm 2
Power transmitted on the basis of allowable bearing
stress
N
AV
kW
102 Ks
8.5
1.4 6.4293
102 1
8.5 102 1
1.4 6.4293
96.322 kg f/cm 2
0.9632 kg f/mm 2
0.9632 [] 2.24 kg f/mm 2
Therefore the design is safe.
Step 9
Pitch dia of small sprocket d
d
p
180
sin
Z1
15.875
180
sin
27
136.74 mm
Design of Flexible Elements
Pitch dia of large sprocket D
D
1.151
p
180
sin
Z2
15.875
180
sin
64
D 323.53 mm
Problem 1.28: Design a chain drive to actuate a compressor
from 15 kW electric motor running at 1000 rpm, the compressor
speed being 350 rpm. The minimum centre distance is 500 mm.
The compressor operates 15 hours per day. The chain tension
may be adjusted by shifting the motor.
Solution
Power transmission N 15 kW
Motor speed
N 1 1000 rpm
Compressor speed N 2 350 rpm
Centre distance A 500 mm
Service
15 hours/day
Let the operating chain may be a roller chain. Since
the optimum centre distance is 30 to 50 pitches.
pmax
500
16.66
30
pmin
500
10
50
(ie) p
a
500
14.3 mm
35
35
1.152
Design of Transmission Systems
The standard pitch value is p 15.875 mm (from
P.S.G. Data book, Page No. 7.72 for pitch between
10 and 16.66 )
Transmission Ratio, i
N1
N2
1000
2.857
350
for i 2.85 , the number of teeth on pinion sprocket,
from P.S.G. Data book, Page No. 7.74.
Z 1 25 (assumed)
then the number of teeth on wheel sprocket.
72
Z 2 i Z 1 2.85 25 71.42 ~
The power transmitted on the basis of breaking load
is given by,
PN
Q .v
kW
102n Ks
(from P.S.G. Data book, Pg.No. 7.77)
N Power to b e transmitted 11 kW
Q Minimu m b reaking load in N
v Chain velocity in m/s
n F.O.S to be assumed
k s Service facto r
Service factor ks k1 k2 k3 k4 k5 k6
from P.S.G. Data book, (Pg.No. 7.76, 7.77)
Design of Flexible Elements
1.153
k 1 1.5 load with heavy sh ock
k 2 1.0 Adjustable supports
k 3 1.0 a p 30 to 50 p
k 4 1.0 Assume th e line joining the centres of the
sprockets is inclined up to 60 to the horizontal
k 5 1.0 Drop lubrication, Assumed
k 6 1.25 Double shift of 16 hours a day
K s 1.5 1.0 1.0 1.0 1.0 1.25
1.875
from the P.S.G. Data book Pg.No. 7.77
Let the minimum F.O.S n 11 for
k s 1 and Z 1 25
n n ks
(or)
n 11 1.875
20.625
Chain velocity, v
Z1 N1 p
60 1000
25 1000 15.875
60 1000
6.61 m/s
Hence minimum breaking load
Q
N n Ks
v
87.75 kg f
15 20.625 1.875
6.61
1.154
Design of Transmission Systems
Since minimum breaking load ((ie) developed
tangential force to break the chain) is 87.75 kgf. We should
select a chain, having higher breaking strength than the
calculated value.
For pitch value of 15.875 mm, DR Rolon chain may
be selected whose breaking strength is 4440.0 kg f from
P.S.G. Data book, Pg.No. 7.72.
Now the chain is checked for its actual F.O.S and for
allowable stresses.
Checking for actual F.O.S, [n ]
Q
P
where P P t P c P s
Now P t Tangential force du e to power transmission
102N
kgf
V
102 15
231.467 kg f
6.61
P c centrifugal tens io n in kgf
From
P.S.G.
Data
book,
Pg.No.
7.72,
W
weight/metre length 17.8 N
PC
WV2 17.8 6.612
79.27 kg f
g
9.81
P S Tension due to sagging of chain in Newtons
kWa, where k Sagging coefficient
from P.S.G. Data Book, Pg.No. 778, position of chain
inclined up to 40 is assumed
Design of Flexible Elements
1.155
hence k 4, a 0.5 m given, W 17.8
P s 4 17.8 0.5
35.6 kg f
P 231.467 79.27 35.6
346.337
Hence [n ]
Q
4440
12.81 11
P 346.337
Since the actual F.O.S is more than adopted
minimum value, chain selection is correct. ie., n n
Checking for induced bearing stress
The induced bearing stress over the projected area of
the chain is given by
N Ks
AV
A Bearing area
From P.S.G. Data book, Pg.No. 7.72, corresponding
to DR 50, Bearing area 140 mm2
Hence
15 1.875
1.4 6.61
3.039 kgf/cm 2 0.03039 kg f/mm
This is less than the allowable bearing stress, whose
value for k s 1.875, Z 1 25 and N 1 1000, fro m P.S.G.
Data bo o k, Pg. 7.77 is 42 N/mm 2
Hence selection of chain is correct
1.156
Design of Transmission Systems
Now length of chain interms of pitches is obtained
as
Z2 Z 1
Z 1 Z 2
2
l p 2a p
2
ap
2
from P.S.G. Data
book, Pg.No. 7.75
2
. . Z2 Z1
.
m
2x
From PSG Data book Pg. No. 7.76 take m 56
But
ap
ao
p
500
31.5
15.875
Hence
25 72
56
lp 2 31.5
2
31.5
113.27 mm; T ake 114
Length may be corrected to 112 pitches
Actual length of chain
114 15.875 1809 mm
Now corrected centre distance
7.75
But
e e2 8 m
a
from P.S.G. Data book, Pg. No.
4
Z1 Z 2
e lp
2
Design of Flexible Elements
1.157
25 72
114
65.5
2
From P.S.G. Data book, Pg.No. 7.76, m 54 , for
Z 2 Z 1 48
65.5 65.5 2 8 54
Hence a
15.875
4
506.47 mm
Centre
distance
(decrement)
accommodate initial chain sag
allowance
0.5 F
But F 0.02 a
0.5 0.02 506.47 5.0647 mm
Hence required centre distance 506.47 5.06
501.48 mm
Now, pitch diameter of pinion sprocket d
d
15.875
P
126 127 mm
180
180
sin
sin
25
Z
1
pitch diameter of wheel sprocket D
D
15.875
P
363.9 364 mm
180
180
sin
sin
72
Z
2
Specifications
Type of chain: 10 A 2 DR 50 Ro ller c hain
Centre distanc e 501.40 mm
to
1.158
Design of Transmission Systems
Number of teeth of sprocket pinion 25
Number of teeth of sprocket wheel 72
Length of chain 1809 mm
Pitch diameter of pinion sprocket 127 mm
Pitch diameter of wheel sprocket 364 mm
Problem 1.29: A 15 kW squirrel cage motor with a speed of,
1250 rpm, is driving a centrifugal pump at 550 rpm. The
centrifugal pump is located at 700 mm from the motor. Design
a chain drive.
Solution
Given Data
Power of motor N 15 kW
Speed o f mo to r N 1 1250 rpm
Speed of centrifugal pump N 2 550 rpm
Minimum centre distance
700 mm
Step 1
Calculation of transmission ratio
Transmission ratio
Z2
Z1
i Transmission ratio
N1
N2
N1
N2
1250
2.27
550
Step 2
From P.S.G. Data Book, Pg.No. 7.74
For i 2 to 3; Z 1 25 to 27
Take Z 1 27 teeth (No. of teeth on sprocket pinion)
Design of Flexible Elements
1.159
Z 2 i Z 1 2.27 27 62
Step 3
From P.S.G. data book, Pg.No. 7.74
Optimum centre distance a (30 to 50) P
where a approximate centre distance
p pitch of chain
pitchmax b max
a 700
23.33 mm
30
30
pitchmin b min
a 700
14 mm
50
50
Select standard pitch from P.S.G. data book, from
Pg.No. 7.72
Take any standard pitch between 14 to 23.33 mm.
select pitch p 15.875 mm
Step 4
Selection of chain number
Select roller chain from P.S.G. Data book, Pg.No.
7.72
The available chain Number are 10 A and 10 B
Select 10 A - 2 Duplex chain
Pitch p 15.875 mm
Corresponding to chain number selected, take the
values of
A Bearing area 1.4 c m2
W Weight per metre length 1.78 kg f
Q Breaking load 4440 kgf
1.160
Design of Transmission Systems
Step 5
Calculate power transmitted based on breaking load
From P.S.G. Data book, Pg.No. 7.77
N
Qv
kW
102 n k s
From the above equation calculate ‘Q’ breaking load
by considering
N given power 15 kW
v
Z1 p N1
60 1000
n
27 15.875 1250
8.929 m/ s
60 1000
Minimum
value
of
factor
of
safety
(Ks 1; Z 1 15 to 30) from P.S.G. data book; Pg.No.7.77;
Select
n 13.2
for
a
pitch
15.875
mm
and
N 1 1600 rpm .
Since the specific conditions are not given, in the
problem, assume K1 K2 K3 K4 K5 K6 1
K5 K 1 K2 K3 K 4 K 5 K 6 1
15
Q 8.929
102 13.2 1
Q 2261.66 kg f which is less than the selected
chain Breaking load 4440 kg f.
The selected chain Number is satisfactory based on
breaking load.
Step 6
(a) Calculation of Length of chain
(b) Final centre distance
Design of Flexible Elements
1.161
(a) Length of continuous chain in multiples of pitches
2
Z2 Z1
Z1 Z2
2
lp 2ap
ap
2
from
P.S.G.
Data
book, Pg.No. 7.75
where ap
ao
p
where ao is initially assumed centre distance
p is pitch in mm
ap
700
44.09
15.875
No. of teeth on sprocket wheel Z 2 62
No. of teeth on sprocket pinion Z 1 27
Read the value of “m” directly from P.S.G. data book
at Z 2 Z 1 from Pg.No. 7.76
the value of m corresponding to Z 2 Z1 35 is 31
62.27
62 27 2
lp 2 44.09
44.09
2
133.38
Length of chain l lp p
133.38 15.875
2117.46 mm
2117.5 mm
2
1.162
Design of Transmission Systems
(b) Final centre distance (from P.S.G. Data book,
Pg.No. 7.75)
a
e
e2 8 m
e lp
But
4
p
Z1 Z2
2
133.38
27 62
88.88 mm
2
Final centre distance
a
88.88 2 8 31
88.88
4
15.875
699.90
a~
700 mm
Step 7
Check the actual factor of safety
From P.S.G. Data book, Pg.No. 7.78
Actual factor of safety [n]
Q
P
where
Q Breakin g loa d of the ch ain 4440 kg
P Pt P s P c
P t Tangential force due to power transmission
102 N
v
Design of Flexible Elements
1.163
where N in kW and v in m/s
102 15
8.929
171.35 kg f
P c Centrifugal tension
W v2
g
where W Weight per meter length. From P.S.G.
Data book, Pg.No. 7.72, corresponding to p 15.875 and
chain number.
W 1.78 kg f/m length
Pc
1.78 8.929 2
14.46 kg f
9.81
P s tension due to sagging
k.W.a
From P.S.G. Data book, Pg.No. 7.78; k - coefficient
for sag. k 6 for horizontal position of chain drive.
and
a is the centre distance
W is weight per meter length
P s 6 1.78
700
1000
7.476 kg f
P 171.35 14.46 7.476
193.286 kg f
1.164
Design of Transmission Systems
[n]
Q
4440
22.97 13.2
P 193.286
which is greater than allowable factor of safety.
The design is safe.
Step 8
Checking of Allowable Bearing stress. From P.S.G.
data book, Pg.No. 7.77, corresponding to speed of rotation
of sprocket 1600 rpm , and pitch 15.875.
Allowable Bearing stress [] 1.85 kgf/mm 2
From P.S.G. Data book, Pg.No. 7.77
Power transmitted on the basis of allowable bearing
stress.
N
15
Av
102 Ks
1.4 8.929
122.39 kg f/cm 2
102 1
Or
1.22 kg f/mm2
[]
1.85 kg f/mm2
The design is safe
Design of Flexible Elements
1.165
Step 9
Pitch dia of small sprocket
d
d
p
180
sin
Z1
15.875
136.74 mm
180
sin
27
Pitch dia of large sprocket D
D
p
180
sin
Z2
15.875
180
sin
62
D 313.43 mm
Problem 1.30: Design a chain drive to run a compressor from
a 11 kW electric motor running at 970 rpm, the compressor
speed being 330 rpm. The compressor operates 16 hours/day.
The centre distance should be approximately 500 mm. The
chain tension can be adjusted by shifting the motor on slides.
Solution
Power transmitted N 11 kW
Motor speed
N 1 970 rpm
Compressor speed N 2 330 rpm
Centre distance
a 500 mm
1.166
Design of Transmission Systems
Service 16 hours/day
Let the operating chain may be a roller chain. Since
the optimum centre distance is 30 to 50 pitches.
assume a 30 50 p where p pitch of chain
(from P.S.G. Data book, Pg.No. 7.74)
(ie) pmax
a
a
500
500
23.33 mm; pmin
10 mm
30
30
50
50
The next standard pitch value, p 15.875 mm
(from P.S.G. Data book, Pg.No. 7.72)
Transmission ratio, i
N1
N2
970
2.93
330
for i 2.93 , the number of teeth on pinion sprocket,
from the P.S.G. Data book, Page No. 7.74
Z 1 25
then the number of teeth on pinion-sprocket
Z 2 iZ 1 2.93 25 73
(from P.S.G. Data book, Pg.No. 7.77)
the power transmitted on the basis of breaking load
is given by
N
Q .v
kW
102n Ks
N P ower to be transmitted 11 kW
Q Minimu m b reaking load in N
v Chain velocity in m/s
Design of Flexible Elements
1.167
n F.O.S to be assumed
K s Service factor
(from P.S.G. Data book, Pg.No. 7.77)
Service factor ks k1 k2 k3 k4 k5 k6
(from P.S.G. Data book, Pg.No. 7.76, 7.77)
k 1 1.5 load with heavy sh ock
k 2 1.0 Adjustable supports
k 3 1.0 a p 30 to 50 p
k 4 1.0 Assume th e line joining the centres of the
sprockets is inclined up to 60 to the horizontal
k 5 1.0 Drop lubrication, Assumed
k 6 1.25 Double shift of 16 hours aday
k S 1.5 1.0 1.0 1.0 1.0 1.25
1.875
From the P.S.G. Data book Pg.No. 7.77
Let the minimum F.O.S n 11 for
k s 1 and Z 1 25
(or)
n 11 1.875 for Ks 1.875 , Z 1 25
20.625
1.168
Design of Transmission Systems
Chain velocity, v
Z1 N1 p
60 1000
25 970 15.875
60 1000
6.41 m/s
Hence minimum breaking load
Q
N n Ks
v
11 20.625 1.875
6.41
66.36 kg f
Since minimum breaking load ((ie) developed
tangential force to break the chain) is 66.36 kg f. We should
select a chain, having higher breaking strength than the
calculated value.
For pitch value of 15.875 mm. DR 50 Rolon chain
may be selected whose breaking strength is 4440 kg f from
P.S.G. Data book, Pg.No. 7.72
Now the chain is checked for its actual F.O.S and for
allowable stresses.
(from P.S.G. Data book, Pg.No. 7.78)
Actual F.O.S, [n ]
Q
P
where P P t P c P s
Now P t Tangential force du e to power transmision
Pt
102 N 102 11
v
6.41
Design of Flexible Elements
1.169
175.03 kgf
P c centrifugal tens io n in Ne wtons
W v2
g
17.8 6.412
9.81
74.55 kgf
W W eight per metre
length
17.8
N
from
P.S.G.
Pg.No.
7.72
Dat
o
a
b
ok,
Ps Tension due to sagging of chain in Newtons
k.W.a , where, k sagging coefficient
from P.S.G. Data book Pg.No. 7.78, position of chain
inclined up to 40 assumed
hence k 4
a 0.5 m given
W 17.8
P s 4 17.8 0.5
35.6 N
P 175.03 74.55 35.6
285.18
1.170
Design of Transmission Systems
Hence [n ]
Q
4440
15.56
P 288.18
Since the actual F.O.S is more than
minimum value, chain selection is correct.
adopted
ie 15.56 11
Checking for induced bearing stress
(from P.S.G. Data book, Pg.No. 7.77)
The Induced bearing stress over the projected area of
the chain is given by
N ks
Av
A Bearing area
from P.S.G. Data book Pg.No. 7.72, corresponding to
DR 50, Bearing area 140 mm 2
This is less than the allowable bearing stress whose
value for k s 1.875 , Z 1 25 and N 1 970 (from P.S.G. Data
book, Pg.No. 7.77) is 42 N/mm 2
Hence selection of chain is correct.
Now length of chain in terms of pitches is obtained as
Z2 Z1
Z 1 Z 2
2
lp 2ap
ap
2
2
from P.S.G. Data book Pg.No. 7.75
Design of Flexible Elements
1.171
But
ap
a0
p
500
31.5 from P.S.G. Data book Pg.No. 7.7 5
15.875
Hence
73 25
25 73
2
lp 2 31.5
2
31.5
2
112.24
Length may be corrected to 112 pitches
Actual length of chain (from P.S.G. Data book,
Pg.No. 7.75)
112 15.875
1778 mm
Now corrected centre distance
e e2 8 m
p
a
4
Pg.No.7.75)
(from
P.S.G.
Data
book,
Z1 Z2
But e lp
2
25 73
112
63
2
m 58.4 , for Z 2 Z1 73 25 48 from P.S.G. Data
book, Pg.No. 7.76
1.172
Design of Transmission Systems
Hence
a 63
63 8 58.4
15.875
4
2
484.8 mm
Centre
distance
(decrement)
allowance
to
accommodate initial chain sag (from P.S.G. Data book,
Pg.No. 7.75)
0.5 F
But
F 0.02 a
0.5 0.02 484.8
4.848 mm
Hence, Required centre distance 484.8 4.848
479.95 mm
(from P.S.G. Data book, Pg.No. 7.78)
Now, pitch diameter of pinion sprocket d
d
p
180
sin
Z1
15.875
127 mm
180
sin
25
Pitch diameter of wheel sprocket D
Design of Flexible Elements
D
1.173
p
15.875
369 mm
180
180
sin
sin
Z2
73
Specifications
Type of chain: 10 A-2 DR 50 Rolon chain
Centre distance: 479.95 mm
Number of teeth of sprocket pinion: 25
Number of teeth of sprocket wheel: 73
Length of the chain: 1778 mm
Pitch diameter of pinion sprocket: 127 mm
Pitch diameter of wheel sprocket: 369 mm
Problem 1.31: A blower is to run at 600 rpm. Power to the
blower is available from a motor rated 8 kW at 1500 rpm.
Design chain drive for the system if the centre distance is to
be 800 mm.
Solution
Given data
Power N 8 kW
Speed of motor N 1 1500 rpm
Speed of blower N 2 600 rpm
Centre distance a 800 mm
Step 1
Calculate of transmission ratio i
i
Z2
Z2
N1
N2
1500
2.5
600
1.174
Design of Transmission Systems
Step 2
From P.S.G data book, Pg.No. 7.74
for i 2 to 3, Z 1 No. of teeth on pinion 25 to 27
Take Z 1 27 teeth
Since Z 2 No. of teeth on wheel i Z1
Z 2 2.5 27 68 teeth
Step 3
Fro m P.S.G Data bo o k, Pg.No. 7.74
Optimum c entre distanc e a 30 p to 50 p
where p pitch
Pitchmax pmax
800
26.66
30
Pitchmin pmin
800
16
50
Select standard
Pg.No. 7.72
pitch
from
P.S.G
Data
book,
Take standard pitch, between 16 mm to 27 mm
select pitch 19.05 mm
p 19.05 mm
Step 4
Selection of chain No.
Select roller chain from P.S.G Data book, Pg.No. 7.72
from the available chain No.
Select chain No. 12A - 1 (simpler roller chain)
p pitch 19.05 mm
Design of Flexible Elements
1.175
Bearing area A 1.05 cm 2
Weight per meter W 1.47 kgf
Breaking load Q 3200 kgf
Step 5
From P.S.G Data book,
transmitted on breaking load
N
Pg.No.
7.77,
power
Qv
102 N 1 k s
N 8 kW
V
p Z1 N1
60 1000
19.05 27 1500
60 1000
19.05 27 1500
12.85 m/s
60 1000
n minimum value of Factor of safety from P.S.G
Data book, Pg.No. 7.77
Select n 13.2 corresponding to speed of rotation of
small sprocket, rpm
Since specific conditions are not given, assume
K 1 K2 K 3 K 4 K 5 K 6 1
KS K1 K 2 K3 K 4 K5 K 6 1
8
Q 12.85
102 13.2 1
Q 838.22 kgf which is less than the selected
Breaking load of 3200 kg f.
1.176
Design of Transmission Systems
Step 6
From P.S.G Data book, Pg.No. 7.75 length of
continuous chain in multiples of pitches
Z2 Z1
Z1 Z2
2
lp 2 a p
ap
2
where ap
2
ao
p
a o initially assu me d centre distance in mm
800 mm
ap
800
41.99
19.05
68 27
2
27 68
lp 2 41.99
41.99
2
2
131.48 mm
132 mm
Length of chain l lp p
132 19.05
2514.6 mm
From P.S.G Data book, Pg.No.
corresponding to Z 2 Z1 68 27 41
m 42.6
From P.S.G Data book, Pg.No. 7.75
7.76,
take
m
Design of Flexible Elements
final centre distance ‘a’
but e lp
e2 8 m
e
p
4
Z1 Z 2
132
a
1.177
2
27 68
84.5
2
84.5
84.52 8 42.6
19.05
4
803.9 mm
804 mm
Step 7
Check the actual factor of safety from P.S.G Data
book, Pg.No. 7.78
Actual factor of safety [n]
Q
P
Q breaking load of the cha in 3200 kg f
P Pt P s P c
where
P t tangential force due to pow er transmission
102 N 102 8
63.5 kg f
v
12.85
P c centrifugal tension
W v2
g
1.47 12.85 2
9.81
24.74 kg f
1.178
Design of Transmission Systems
P s tension due to sagging k W a
from P.S.G Data book, Pg.No. 7.78
k coefficient of sag 6 Horizontal
a 796 mm 0.796 m
P s 6 1.47 0.796
7.02 kg f
P 63.5 24.74 7.02
95.26 kg f
Actual factor of safety [n]
Q
P
3200
95.26
33.59 13.2 greater than allowable FOS
Step 8
Checking of Allowable bearing stress from P.S.G Data
book, Pg.No. 7.77
allowable bearing stress 1.85 kg f/mm 2
Power transmitted on basis of allowable bearing
[] Av
stress N
102 k s
8
[] 1.05 12.85
[] 60.47 kgf/cm 2
102 1
or
[] 0.6047 kgf / mm 2 1.85 kgf / mm 2
Design of Flexible Elements
1.179
(i.e.) allowable bearing stress
The design is satisfactory.
Problem 1.32: A compressor is to be actuated from a 10 kW
electric motor. The speed of the motor shaft is 1000 rpm and
the compressor speed being 350 rpm. The minimum centre
distance is 500 mm. The compressor operates 16 hours per
day. Design a suitable chain drive.
Solution
Given
P 10 kW ; N1 1000 rp m, N 2 350 rp m ,
a 500 mm 0.5 m, servic e 16 hours/day.
Let the operating chain may be roller chain from
P.S.G Data book, Page No. 7.74, the optimum centre
distance is 30 to 50 pitches.
p is the pitch of the chain.
(ie)
pmin
pmax
a
500
16.36 mm
30 30
500
11
50
select standard pitch betn (11 to 16.6)
From P.S.G Data book, Page No. 7.72, The next
standard pitch value, p 15.875 m
From P.S.G Data book, Page No. 7.74
Transmission ratio i
N1
N2
1000
2.857
350
1.180
Design of Transmission Systems
for i 2.857 , the number of teeth on pinion-sprocket,
from P.S.G Data book, Page No. 7.74,
Z 1 25 As su med
then the number of teeth on wheel-sprocket,
Z 2 iZ 1
2.857 25
71.425
~
72
The load applied on the chain due to transmitted
power is given by.
Q
N ks n
v
where N power to be transmitted 10 kW 10,000
watts
v chain velocity in m/s
n Factor of safety to be assumed
k s Service factor
Now service factor
ks k1 k2 k3 k4 k5 k6
From P.S.G Data book, Page No. 7.76
k 1 1.5
(Load with heavy shock)
k 2 1.0
(Adjustable supports)
k 3 1.0
ap 30 to 50p
Design of Flexible Elements
1.181
k 4 1.0
(Assume the line joining the centres of the
sprockets is inclined upto 60 to the
horizontal)
k 5 1.0
(Assuming drop lubrication)
k 6 1.25
(16 hours/day service)
k s 1.5 1 1 1 1 1.25
1.875
From P.S.G Data book, Page No. 7.77
Let the minimum factor of safety,
n 11 for ks 1 and Z 1 25
for
ks 1.875 and Z 1 25
n 11 1.875
20.625
Chain velocity, V
Z 1N 1p
60 1000
25 1000 15.875
60 1000
6.614 m/s
Hence the minimum breaking load,
Q
N n k s
v
10,000 20.625 1.875
6.614
58,469.72 N
Since the minimum breaking load (ie., developed
tangential force to break the chain) is 58,469.72 N , we
1.182
Design of Transmission Systems
should select a chain having higher breaking strength than
the calculated value.
From P.S.G Data book, Page No. 7.72
for the pitch value of 15.875 mm, DR 50 Rolon chain
may be selected whose breaking strength is 66600 N
Now the chain is checked for its actual factor of
safety and for allowable stress.
Checking for actual factor of safety:
From P.S.G Data book, Page No. 7.78
Actual factor of safety, [n]
where
and
Q
P
P P t P c P s
Q Breaking strength of selected chain
Now
P t Tangential force due to power transmission
N
Newtons
v
10000
1575 Newton
6.35
F c Centrifugal tension in Newtons
Wv 2
g
From P.S.G Data book, Page No. 7.72,
W weigth per metre length 30.2 N
Design of Flexible Elements
Pc
1.183
30.2 6.352
9.81
124.132 N
P s Tension due to sa gging of chain in newtons
kWa
From P.S.G Data book, Page No. 7.78
where k Sagging coefficient 4 (position of chain
drive inclined upto 40)
P s 4 30.2 0.5
60.4 N
P 1575 124.132 60.4
1759.53 N
Hence
[K n]
Q
P
66600
37.85
1759.53
Sinc e the ac tual fac to r o f safety is mo re than ado pted
minimum value,c hain selec tio n is c o rrec t.
Chec kingfo rinduc ed bearing stress:
The induc ed bearing stress o ver the pro jec ted area o f
the c hain is given by
N ks
Av
from P.S.G Data book, Page No. 7.72
1.184
Design of Transmission Systems
A B earing area 210 mm 2
10,000 1.875
210 6.35
14.06 N/mm 2
This is less than the allowable bearing stress whose
value is 28.7 N/mm 2 from P.S.G Data book, Page No. 7.77.
Hence the chain selection is correct.
From P.S.G Data book, Page No. 7.75
Now the length of chain interms of pitches is
obtained as,
Z2 Z1
Z1 Z 2
2
L p 2ap
ap
2
But
ap
a0
p
2
500
31.5
15.875
Hence,
72 25
2
25 72
L p 2 31.5
2
31.5
2
113.2
Length may be corrected to even number such as
L p 114 pitches.
Actual length of chain
l lp p
Design of Flexible Elements
1.185
114 15.875
l 1810 mm
From P.S.G Data book, Page No. 7.75
Now the correct centre distance,
e e 2 8m
p
a
4
where
Z1 Z2
e lp
2
25 72
114
2
65.5 ~
66
From P.S.G Data book, Page No. 7.76
Corresponding to Z 2 Z1 72 25 47
m 56
Hence
66 662 8 56
15.875
a
4
510 mm
from P.S.G Data book, Page No. 7.75
Centre
distance
(decrement)
accommodate initial chain sag,
But F 0.02 a
allowance
to
1.186
Design of Transmission Systems
0.5F
0.5 0.02 a
0.5 0.02 510
5.1 mm
Hence required centre distance
510 51
505 mm
From P.S.G Data book, Page No. 7.78
The pitch diameter of pinion sprocket, d
d
15.875
p
180
180
sin
sin
Z1
25
d 127 mm
and
The pitch diameter of wheel sprocket, D
D
15.875
p
180
180
sin
sin
Z2
72
D 364 mm
Specifications
Type of chain 10 A 2 DR 50 Rolon chain
Centre distanc e 505 mm
number of teeth of sprocket pinion 25
number of teeth of sprocket wheel 72
Design of Flexible Elements
1.187
Length of chain 1810 mm
Pitch diameter of pinion sprocket 127 mm
Pitch diameter of wheel sprocket 364 mm
Problem 1.33: Design a chain drive to actuate a compressor
from a 10 kW electric motor at 960 rpm. The Compressor speed
is to be 350 rpm. Minimum center distance should be 0.5 m.
Compressor is to work for 8 hours/day.
Given data
Power of motor N 10 kW
Speed of motor N 1 960 rpm
Speed of the compressor N 2 350 rpm
Minimum centre distance a 500 mm
Solution
Step 1: Calculation of transmission ratio
From PSG Data book, Pg.No: 7.74
Transmission ratio i
i
Z2
Z1
N1
N2
N1
N2
960
2.74
350
Step 2: Number of Teeth
From PSG Data book, Pg.No. 7.74
For i 2 to 3; Z 1 25 to 27
i 3 to 4; Z 1 23 to 25
Take Z 1 25 to 27 (select any odd number of teeth)
1.188
Design of Transmission Systems
Select Z 1 27 teeth (number of teeth on sprocket
pinion)
Z 2 i Z 1 2.74 27
74
Z 2 73.98 ~
Z 2 74 teeth
Step 3: Selection of pitch
From PSG Design data book, Pg.No: 7.74
Optimum centre distance a (30 to 50) p
Pitchmax
500
16.66
30
Pitchmin
500
10
50
Select standard
Pg.No. 7.74
pitch
from
PSG
Data
book
Take any standard pitch between 10 mm and
16.66 mm
select pitch p 15.875 mm
Step 4: Selection of chain number
from PSG Data book, Pg.No. 7.72
The available chain number are 10 A and 10 B
Select 10 A 2 Duplex chain
from PSG Data book, Pg.No. 7.72
corresponding to 10 A 2 and Pitch = 15.875 mm
A Bearing area 1.4 c m2
Design of Flexible Elements
1.189
W Weight per m etre length 1.78 kgf
Q Breaking load 4440 kgf
Step 5: Selection of Breaking load
From PSG Data book, Pg.No. 7.77,
Power transmitted on the basis of breaking load
N
Q.v
102n K s
We know that v
Z1 p N1
60 1000
27 15.875 960
60 1000
v 6.858 m/s
Since specific conditions are not given in the problem,
assume K1 K2 K3 K4 K5 K6 1
Ks 1
from PSG Data book, Pg.No. 7.77, corresponding to
ks 1, Z 1 15 to 30, pitch p 15.875 ,
N 1 960 rpm 1000 rpm
n 11 allowable factor of sa fety
Q
102n k s N
u
102 11 1 10
6.858
Q 1636.04 kg f
selected chain Breaking load
4440 kg f
Step 6
(a) calculation of length of chain
(b) final centre distance
1.190
Design of Transmission Systems
(a) Calculation of length of chain
From PSG Data book, Pg.No. 7.75,
Length of continuous chain in multiples of pitches
lp
Z2 Z1
Z1 Z2
2
2ap
2
ap
where ap
ap
2
ao
p
500
15.875
ap 31.49
74 27
27 74
2
lp 2 31.49
31.49
2
2
62.98 50.5 1.776 115.25 116 approximated to 116
from PSG Data book,
Length of chain l lp p
116 15.875 1841.5 mm
Take
l 1840 mm
(b) Final centre distance
from PSG Data book, Pg.No. 7.75
Final centre distance corrected to even number of
pitches ‘a’
Design of Flexible Elements
a
e
e2 8 m
4
1.191
p
z1 z2
27 74
e lp
116
2
2
where
e 65.5 mm
2
z2 z1
74 27
m
2
2
and
2
m 55.95
Final centre distance ‘a’
65.52 8 55.95
65.5
4
15.875 505.97
a~
506 mm
Step 7
Check the actual factor of safety
From PSG Data book, Pg.No. 7.78
Actual factor of safety [n]
Q
P
where Q breaking load of ch ain 4440 kg
and P Pt P s P c
where
Pt
tangential
force
transmission
from PSG Data book, Pg.No. 7.78
Pt
102 N
v
due
to
power
1.192
Design of Transmission Systems
Pt
102 10
6.858
148.73 kg f
and
P c centrifugal tension
from PSG Data book, Pg.No. 7.78,
2
Pc
W v2 1.78 6.858
8.533 kgf
g
9.81
and P s tension due to sagging of chain
from PSG Data book, Pg.No. 7.78
Ps k W a
where k coefficient of sag
from PSG Data book, Pg.No. 7.78, corresponding to
position of chain drive as horizontal
k6
P c 6 1.78
506
5.404 kgf
1000
P 148.73 8.533 5.404 162.66 kg f
[n]
Q
4440
27.29 11
P 162.66
which is greater than allowable factor of safety
The design is safe.
Step 8
Checking of Allowable bearing stress
From PSG Data book, Pg.No. 7.77, corresponding to
pitch = 15.875 mm, speed less than 1000 rpm
Design of Flexible Elements
1.193
[] 2.24 kgf/mm 2
From PSG Data book, Pg.No. 7.77,
Power transmitted on the basis of allowable bearing
stress
N
Av
102 k s
102N k s
AV
102 10 1
1.4 6.858
106.236 kgf/cm 2 1.062 kg f/mm 2 2.24 kgf/mm2
[]
The design is safe
Step 9
Pitch diameter of small sprocket d
d
15.875
p
180
180
sin
sin
Z1
27
d 136.74 mm
Pitch diameter of large sprocket D
D
15.875
p
180
180
sin
sin
74
Z2
D 374 mm
Chapter 2
SPUR GEARS AND PARALLEL
AXIS HELICAL GEARS
Speed ratios and number of teeth-Force analysis -Tooth
stresses - Dynamic effects – Fatigue strength - Factor of safety Gear materials – Design of straight tooth spur & helical gears
based on strength and wear considerations – Pressure angle in
the normal and transverse plane- Equivalent number of
teeth-forces for helical gears.
2.1 INTRODUCTION
Gears are defined as toothed wheels, that transmit
power and motion from one shaft to another due to the
successive engagement of teeth.
2.1.1 Advantages of Gear drives
1. It is a positive drive and the velocity ratio
remains constant.
2. The drive is compact, since the centre distance
between the shafts is relatively small.
3. It can transmit more power.
4. The efficiency of gear drive is very high (99% in
case of spur gears)
5. In the gear box, shifting of gears is possible.
Hence, velocity ratio can be changed over a wide
range.
2.2
Design of Transmission Systems
2.1.2 Disadvantages
1. Gear drives are costly.
2. Maintenance cost is high.
3. Manufacturing
complicated.
processes
for
gears
are
4. Gear drives require careful attention.
5. Accurate alignment of shafts is required.
2.2 CLASSIFICATION OF GEARS
Gears are broadly classified into four groups;
1. Spur gears
2. Helical gears
3. Bevel gears and
4. Worm & Worm wheel
1. Spur gears: The teeth are
cut parallel to the axis of the
shaft. Spur gears are used,
when the shafts are parallel.
2. Helical gears: The teeth
of these gears are cut at an
angle with the axis of the
shaft. Helical gears impose
radial and thrust loads on the
Fig:2 .1 S pur G ea r
shafts. To eliminate the end
thrust load, double helical gears are used. These gears are
called as Herringbone gears. The construction results in
equal and opposite thrust reactions, balancing each other
and there is no thrust load on the shaft.
Spur Gears & Parallel Axis Helical Gears
2.3
Fig 2.2 (a) Helical
Fig 2.2 (b) D ouble Helical gear
Helical and Herringbone gears are used, when the
shafts are parallel.
3. Bevel gear: Bevel gears are used for shafts whose axes
intersect each other. The angle can be 90, less than 90
or more than 90. The tooth of the bevel gears can be cut
straight or spiral.
Fig. 2.3 Bevel gear
2.4
Design of Transmission Systems
4. Worm and Worm wheel:
Worm and Worm wheel are
used for shafts, whose axes do
not
intersect
and
are
perpendicular to each other.
Worm gears are mainly used
for high speed reduction ratio.
The worm is in the form of a
threaded screw, which meshes
with a wheel.
Fig 2.4 W orm and Wo rm wheel
2.3 TERMINOLOGY OF SPUR GEAR
1. Pitch Circle: It is an imaginary circle which allows
pure rolling action without slip.
2. Pitch Circle diameter (PCD): (d) It is the diameter
of the pitch circle. The size of the gear is usually specified
by pitch circle diameter (d).
3. Pitch point: It is a common point of contact between
two pitch circles.
4. Base circle: It is an imaginary circle from which the
involute curve of the tooth profile is generated.
5. Pressure angle or angle of obliquity: : It is the
angle between the common normal to two gear teeth at the
point of contact and the common tangent at the pitch point.
The standard pressure angles are 14 12 and 20.
6. Circular Pitch: Pc It is the distance measured along
the pitch circle between two similar points on adjacent
teeth.
Spur Gears & Parallel Axis Helical Gears
D ede nd um
ce
F a th
w id
A dde ndu m
2.5
A dde ndu m circle
Top la nd
P itch su rfa ce
Fa
Tota l de pth
W orking
D epth
F
ce
P itch circle
k
la n
Too th spa ce
C ircu lar p itch
Too th th ickne ss
R oot
or
D ede nd um circle
C lea ran ce
C lea ran ce or
w orking d epth circle
Fig: 2.5.Term s used in gears
Pc
d
Z
7. Diametral pitch: P d It is the ratio of the number of
teeth to the pitch circle diameter.
Pd
Z
d
Pc Pd
8. Module: m: It is defined as the reciprocal of diametral
pitch. (or) It is the ratio between pitch diameter and the
number of teeth.
m
1
1 d
P d Z Z
d
Module is represented in millimeter.
2.6
Design of Transmission Systems
9. Gear ratio i: It is the ratio of number of teeth on
the gear to the number of teeth on pinion.
Z 1 No . of teeth o n pinio n
Z 2 N1 Z 2 No. of teeth on gear
i
Z 1 N2
N 1 Speed o f pinion
N Speed of gear
2
10. Transmission ratio: It is the ratio of the angular
speed of the first driving gear to the angular speed of the
last driven gear in a gear train.
2.4 GEAR TOOTH FAILURES
There are two basic modes of gear tooth failure
1. Breakage of the tooth due to the static and
dynamic loads
2. Surface distruction or tooth wear.
The breakage of the tooth can be avoided by adjusting
the parameters in the gear design, such as module and face
width.
The various types of gear tooth wear are as follows:
1. Abrasive wear: The dust particles in the lubricant,
dirt, rust, metallic debris can scratch the tooth surface.
It can be prevented by providing oil filters, increasing
surface hardness and use of high viscosity oil.
2. Corrosive wear: The corrosion of the tooth surface is
caused by extreme pressure of additives present in the
lubricating oil and due to external contamination.
It can be prevented by providing complete enclosure
of gears from external contamination.
Spur Gears & Parallel Axis Helical Gears
2.7
3. Initial pitting: It is caused due to errors in the tooth
profile, surface irregularities and misalignment. It can be
prevented by precision machining of gears, adjusting the
correct alignment of gears and reducing the dynamic loads.
4. Destructive pitting: It is a surface fatigue failure
which occurs when the load on gear tooth exceeds the
surface endurance strength of material.
It can be prevented by designing the gears so that
the wear strength of the gear tooth is more than the sum
of static and dynamic loads.
5. Scoring: This is due to excessive surface pressure,
high surface speed and inadequate supply of lubricant. Due
to the break down of the oil film, excessive frictional heat
leads to overheating of the meshing teeth. Scoring can be
avoided by selecting the parameters, such as surface speed,
surface pressure and the flow of lubricant in such a way
that the resulting temperature at the contacting surfaces
is within permissible limits.
2.5 LAW OF GEARING
For a constant velocity ratio, the profile of the teeth
must be such that the common normal to the profiles at
any point of contact always intersects the line of centres
at the same point, which is called the pitch point, which
is the tangency of their pitch circles.
Forms of Teeth
1. Involute teeth
2. Cycloidal teeth.
An Involute of a circle is a plane curve generated
by a point on a tangent, which rolls on the circle
Design of Transmission Systems
2.8
V c1
1
O1
on
m m al
o
C
rm
No
V c2
N
C
M
2
O2
Fig: 2.7 Law o f gearing
without slipping.
(Normal at any point of an involute is a tangent
to the circle).
A cycloid is the curve traced by a point on the
circumference of a circle which rolls without
slipping on a fixed straight line.
2.5.1 Advantages of Involute gears
1. The centre distance for a pair of involute gears
can be varied within limits without changing the
velocity ratio.
But incase of cycloidal gears, the exact centre
distance should be maintained.
2. In involute gears, the pressure angle, from the
start of the engagement of teeth to the end of the
engagement remains constant. Due to this
condition, the drive is smooth and also the wear
of gears is less.
In cycloidal gears, the pressure angle is maximum
Spur Gears & Parallel Axis Helical Gears
2.9
at the beginning of the engagement, reduces to
zero at pitch point, starts increasing and again
becomes maximum at the end of the engagement.
This results in less smooth running of gears.
3. The face and flank of involute teeth are generated
by a single curve. Therefore, the manufacturing
of involute teeth are easy.
In case of cycloidal teeth, double curves (Epi cycloid for face and Hypo-cycloid for flank) are
required. Therefore, the manufacturing of
cycloidal teeth are difficult.
2.5.2 Disadvantages of Involute Teeth
The main disadvantage of the involute teeth is
that the interference occurs with pinions having
smaller number of teeth.
This may be avoided by altering the heights of
addendum and dedendum of the mating teeth.
(Interference: When the tip of the tooth of
pinion undercuts the root on its mating gear, it
is known as Interference)
Interference may be prevented, if the addendum
circles of the two mating gears cut the common
tangent to the base circles between the points of
tangency. (OR) The point of contact between the
two teeth is always on the involute profiles of both
the teeth.
2.5.3 Advantages of Cycloidal Gears
1. The cycloidal teeth have wider flanks, therefore
for the same pitch, cycloidal gears are stronger.
2.10
Design of Transmission Systems
2. Cycloidal gears have less wear, because the
contact takes place between a convex flank and
concave surface.
3. In cycloidal gears, the interference does not occur
at all.
2.5.4 Disadvantages
Manufacturing of cycloidal gear is difficult.
Therefore, due to simplicity during manufacturing
and flexibility, the involute gears are generally
used.
2.6 SPEED RATIO AND NUMBER OF TEETH
Speed ratio is defined as the ratio of the speed of the
faster gear (smaller size gear) to the slower gear (larger
size gear).
It is also called as the gear ratio (i), which is the
ratio of number of teeth of large gear to smaller gear.
It should be always greater than unity (1)
Z 2 =6 0 To oth G ea r
d1
Z 1 =3 6 To oth G ea r
1 (Pinion )
Fig 2.8
d
2 (ge ar)
d2
Spur Gears & Parallel Axis Helical Gears
i
where
N1
N2
Z2
Z1
2.11
d2
d1
Z 1 number. of teeth on smaller pinion
Z 2 number. of teeth on larger gear
N 1 speed of small pinion gear in rpm.
N 2 speed of large gear in rpm.
2.7 MINIMUM NUMBER OF TEETH
The minimum number of teeth on pinion to avoid
interference is given by
Z min
2
sin 2
20 [full depth involute system]
Assume number of teeth as 18 to 20 for safe design.
2.8 FORCE ANALYSIS [SPUR GEAR]
The power is transmitted by means of a force exerted
by the tooth of the driving gear on the engage (meshing)
tooth of the driven gear.
According to the law of gearing, this resultant force
F must always act on the pressure line.
The pressure line is the tangent line which is tangent
to the base circles of the gear and pinion.
Since the direction of resultant force F is inclined at
an angle called as pressure angle, the resultant force
can be resolved at the pitch point into two components such
as.
2.12
Design of Transmission Systems
1. Tangential component of force F t
2. Radial component of force F r
1. Tangential component of force Ft
F t is the useful force, because it is employed to
transmit power. The transmitted power and torque can be
calculated by using F t.
Mt
2 Mt
Tangential Force,
Ft
Radial Force
F r F t tan
Resultant Force
F
F 2r
F 2t
d/2
d
(Or)
F
Ft
cos
O1
Pre ssure
line
p in ion
d river
F
Pitch po int
G ear
d riven
Fig 2.9 (a)
O2
Spur Gears & Parallel Axis Helical Gears
Power transmitted
P F t v
Pinion
d river
v pitch line velocity
v
O1
dN
;
60
Ft
F
2. Radial component of
force F r
Radial component of
force F r, is a separating
Pitch
p oin t
Fr
Fr
F
Pitch
p oin t
Ft
G ea r
d riven
force, since it is always
directed towards the center
of gear, tries to separate the
gears. The F r does not do
O2
any useful work. This force
F r
produces
bending
moment on the gear shaft,
so it is also called as
bending force.
Fig:2.9. (b)
where P Power transmitted
M t Torque transmitted
d Pitch circle diameter of driving gear
N Speed of driving gear in rpm
Pressure angle
v Linear velocity
Torque Transmitted M t
60 P
2 N
2.13
2.14
Design of Transmission Systems
[Note: The tangential force should be same for both
pinion and gear wheel]
The analysis of gear tooth is based on the following
assumptions
1. The effect of dynamic load is neglected.
2. Friction losses in the bearings and gears are
negligible.
3. The gears mesh at the pitch circles.
4. The shafts for pinion and gear are parallel.
2.9 TOOTH STRESSES (THE LEWIS BENDING
EQUATION)
Wilfred Lewis introduced
an equation for estimating the
bending stress in gear tooth. This
equation formulated in 1892 still
remains the basis for most gear
design today. In the Lewis
analysis, the gear tooth is treated
as a cantilever beam and the
tangential component F t causes
b
t
Ft
............................ . .
..................................................................................
.... .............................................
..............................................
.. ................ . ...... ......
.................. ......
...................
..... ....
h
Fig. 2.10. G ear tooth as cantilever
the bending moment about the base of the tooth.
The Lewis equation is based on the following
assumptions.
(i) The effect of radial component F r which induces
compressive stress is neglected.
(ii) It is assumed that the tangential component F t
is uniformly distributed all over the face width of
Spur Gears & Parallel Axis Helical Gears
2.15
the gear (this is possible when the gears are rigid
and accurately machined).
(iii) The effect of stress concentration is neglected.
(iv) It is assumed that at any time, only one pair of
teeth is in contact and takes total load.
It is observed that the cross section of the tooth varies
from free end to fixed end. Therefore, a parabola is
constructed within the tooth profile and shown in Fig. 2.11
as dotted lines.
Gear tooth as parabolic beam
Fr
The advantage of parabolic out
line is that it is a beam of uniform
strength, and the stress at any cross
section is uniform.
O
Ft
h
X
X
We know
t
Bending Moment, M b F t h...(1)
N
Se ctio n
at XX
bt 3
t
I
and y 1
12
2
Fig:2.11
b
A
y1 maximum distance between center line and
the extreme fibre.
b
Mb y
I
Mb
I
y
1
bt 3
bt 2
12
Z m Section modulus
t
6
2
Mb
Zm
2.16
Design of Transmission Systems
b Permissible bending stress (N / mm2)
bt 2
b
Ft
6h
6F t h
bt 2
...(2)
Multiplying the numerator and denominator of the
right hand side by P c (circular pitch)
t2
F t P c b b
6hP c
The bracketed quantity depends on the form of the
tooth and is termed as Lewis factor or form stress
factor y.
Let
y
t2
6hP c
Then the equation can be rewritten as F t P c b b y
...(3)
Where, y is called as Lewis form factor
where
h length of the tooth
b maximum bending stress
I moment of Inertia
b face width
t thickness of tooth
P c circular pitch
y Lewis form factor
Spur Gears & Parallel Axis Helical Gears
2.17
When the stress reaches the permissible magnitude
of bending stresses, the corresponding force F t is called
the beam strength F s
F s [ b] P c by [ b] by m
where,
. .
. P c m
Lewis Equation
F s beam strength of gear tooth (N) (or) kg f
[b] Permissible bending stress N/mm2 (or)
Allowable static stress kg f / cm2
The above equation is known as LEWIS EQUATION
From PSG Data book Page: 8.50
y 0.124
0.684
for 14 12 full depth Involute
Z
0.154
0.912
for 20 Involute
Z
0.175
0.95
for 20 Involute subteeth
Z
In order to avoid the breakage of gear tooth due to
bending, the beam strength should be more than the
effective force between the meshing teeth.
In design of gears, it is required to decide the weaker
force between pinion and gear.
When the same material is used for pinion and gear,
the pinion is always weaker than the gear . .
. Pc m
We know that F s [b] b y P c
It can be observed that ‘m’ and ‘b’ are same for
pinion as well as gear in a gear pair,
2.18
Design of Transmission Systems
When different materials are used, the product
b y decides the weaker one between the pinion
and gear
The Lewis form factor y ia always less for pinion
compared to gear
Therefore, when the same material is used for
pinion and gear, the pinion is always weaker than
the gear and hence design should be based on
pinion.
Effective load-Calculation
To determine the tangential component
resultant force between two meshing teeth,
of
the
This component can be calculated by using
(I) M t
(II) F t
P 60
, and
2 N 1
2M t
d1
The value of the tangential component, depends upon
rated power and rated speed.
We know that,
[b] is permissible static bending stress which is
modified to C v b where, C v is the velocity factor considered
in fatigue loading.
This velocity factor C v developed by Carl. G. Barth,
can be expressed in terms of Pitch line velocity.
Spur Gears & Parallel Axis Helical Gears
2.19
The values of velocity factor are as given below
(i) C v
3 vm
3
, For ordinary and commercially cut
gears (made with form cutters) and vm 10 m/sec
(ii) C v
6 vm
6
, For accurately hobbed and generated
gears, vm 5 20 m/sec.
(iii) C v
5.5 vm1/2
, For precision gears
5.5
shaving grinding and lapping and vm 20 m/sec
(iv) C v
1 vm
1 0.25 vm
with
, For non-metallic gears.
Where, vm Pitch line velocity (m/sec)
dN
60 10 3
d in mm
(The velocity factor is an empirical relationship
developed by past experience).
2.10 DYNAMIC EFFECTS (DYNAMIC TOOTH LOAD)
When gears rotate at very low speed, the tangential
tooth load F t can be considered to be the actual force
present between two meshing teeth.
However, the most of the cases, the gears rotates at
appreciable speed and it becomes necessary to consider the
dynamic force resulting from impact between mating teeth.
2.20
Design of Transmission Systems
The Dynamic force is induced due to the following
factors.
1. Inaccuracies of the tooth profile,
2. Errors in tooth spacings,
3. Misalignment between bearings,
4. Elasticity of parts, and
5. Inertia of rotating masses.
These are two methods to account for Dynamic load.
I. Approximate estimation by the velocity factor in
the preliminary stages of gear design
II. Precise estimation by Buckingham’s equation in
the final stages of gear design.
Note: Approximate estimation, using velocity factor C v
developed by C.G. Barth was discussed earlier.
In the final stages of gear design, when gear
dimensions are known, errors specified and quality of gears
determined, the Dynamic load is calculated by equation
derived by Buckingham.
Where, F d Dyn amic load
Ft Fi
Where F t Tangential tooth load
F i Increment load due to dynamic action
0.164 V m cb F t
Fd Ft
cb F t
0.164 V m 1.485
Where Vm Pitch line Velocity (m/min)
Spur Gears & Parallel Axis Helical Gears
2.21
c Dynamic factor kg f/cm 2 depending upon
machining errors
e measured error in action between gears in cm
b face width of tooth (cm)
F t tangential force due to rated torque kg f
The Dynamic factor c, depends upon modulus of
elasticity of materials for pinion and gear and the form
tooth or pressure angle and it is given by
c
e
1
1
K
E1 E2
Where, K Constant depending upon the form of teeth.
E 1 Modulus of elasticity of pinion material
kgf/cm2
E2
Modulus of elasticity of gear material
kgf/cm2
The error, e in the dynamic load equation is
measuring error in action between gears in (cm)
This error depends upon the quality of gear and
manufacturing methods.
2.11 WEAR TOOTH LOAD (OR) FATIGUE
STRENGTH OF GEAR
WEAR
For gears, wear is defined as loss of material from
contacting surfaces of teeth.
2.22
Design of Transmission Systems
It is further classified as
Normal wear
Moderate wear
Destructive wear
Abrasive wear
Scratching wear, etc.
Generally, normal wear (Polishing in) does not
constitute failure because it involves loss of metal
at a rate too slow to affect performance
Moderate wear refers to loss of metal more rapid
than normal wear.
This need not necessarily be destructive and may
develop on heavily loaded gear teeth.
Destructive wear usually results from loading that
is excessive for the
lubricant
D riving
to oth
employed.
The
effect
of
destructive
wear
on the tooth profile
of an involute gear
is depicted in the
Figure 2.12.
P itch
circle
P itch
circle
D rive n
to oth
Fig:2.12
PITTING
Pitting is the principal mode of failure of rolling
surfaces. The details of the process vary with the material
and operating conditions, but in all cases, it manifests itself
by the initiation and propagation of cracks in the near
Spur Gears & Parallel Axis Helical Gears
2.23
surface layer until microscope pieces detach themselves to
form a pit or a spall.
In spur gears, surface pitting has long been
recognised as one of the failure modes. This is often
referred to as “Pitch line Pitting”
The main factors affecting pitting type of failure,
Contact stress.
Material pouring and hardness.
Surface finish and lubrication
Contact stress was originally conceived By
“HERTZ” in 1896 whose name it is often referred to as
Hertz Contact Stress.
The failure of the gear tooth due to pitting occurs
when the contact stress between two meshing teeth exceeds
the surface endurance strength of the material.
In order to avoid this type of failure, the proportion
of the gear tooth and surface properties such as surface
hardness should be selected in such a way that the wear
strength of the gear tooth is more than the effective load
between the meshing teeth.
The Hertz stress is based on the assumptions of
electric and isometric material behaviours, load is
compressive and normal to the contacting surfaces which
are stationary and the size of contacting area whose
dimensions are relatively smaller compared with the
curvature radius of the contacting bodies
The Figure 2.13 illustrates the contact area and
corresponding stress distribution between two cylinders.
2.24
Design of Transmission Systems
z
R2
R1
pO
x
p
r
L
b
Y
Fig:2.13
Here the area of contact stress which is theoretically
rectangular with one dimension being the cylinder length
L . (i.e. corresponding to face width of the gear)
The distribution of pressure is represented by a semi
elliptical prism and the maximum contact pressure P 0
exists on the load axis.
The gear design practice is to estimate the contact
stress at the pitch point of the teeth by assuming line
contact between two cylinders whose radius of contact
depends on the gear geometry at the pitch point.
The analysis of wear strength was done by Earle
Buckingham and was accepted by AGMA (American Gear
Manufacturing Association) in 1926. This Buckingham
equation gives the wear strength of the gear tooth based
on Hertz theory of contact stress.
Hence, the maximum tooth load from wear
consideration as evaluated from Hertz contact stress
equation applied for pitch point contact is given by
Spur Gears & Parallel Axis Helical Gears
2.25
F w d 1 bQk
Where d1 Pitch circle diameter of pinion in (cm)
b Face width of the pinion in (cm)
Q Ratio factor
2i
i1
[ for external
for internal]
2Z 2
Z2 Z1
Load stress factor also known as material
combination factor in kg f/cm2
k
This load stress factor depends upon the maximum
fatigue limit of compressive stress, the pressure angle, and
the modulus of elasticity of the materials of the gear.
According to Buckingham theory, this load stress
factor is given by
k
c2 sin 1
1
E E
1.4
2
1
Where, c Surface endurance limit of a gear pair in
kg f/cm2.
2.12 FACTOR OF SAFETY [F.O.S]
Factor of safety is defined as the ratio of the ultimate
stress to working stress
F.O.S
Ultimate stre ss
Working stress
2.26
Design of Transmission Systems
F.O.S
Material strength
D esign Load
2.12.1 (i) Factor of safety for bending
F.O.Sb
Beam strength of gear tooth F s
Dynamic load on gear tooth Fd
F.O.S for bending is in between 1.5 to 2.
2.12.2 (i) Factor of safety for pitting
F.O.Spitting
Wear strength of gear tooth F w
Dynamic load on gear tooth F d
F.O.S for pitting is 2.
2.13 GEAR MATERIALS
The gears are manufactured from both metallic and
non-metallic materials. Some of the materials are given
here.
2.13.1 Metallic materials
1. Cast Iron
2. Steel
3. Bronze, etc.
2.13.2 Non-metallic materials
1. Wood
2. Rawhide
3. Compressed paper
4. Synthetic resins like nylon etc.
Spur Gears & Parallel Axis Helical Gears
2.27
2.13.3 Selection of gear materials
The gear materials should have following properties.
1. High tensile strength to prevent failure against
static loads.
2. High endulance strength to withstand Dynamic
loads.
3. Low co-efficient of friction.
4. Good manufacturability.
PSG Design Data book Page no. 1.40
MATERIALS FOR GEARS
Material
IS
Specification
Tensile
strength
Brinell
N/mm 2
Hardness
number
Grey Cast Iron
Grade 25
250
197
Phosphor
Bronze
Sand Cast
Chill cast
160
240
60
70
Centrifugally
cast
270
90
Cast Steel
Grade 1
550
145
Constructional
St 58
580-680
160-190
C 60
600-700
180-200
Carbon steel
C 45
700
145 Core
for
surface
C 55
720
460 Case
200 Core
steel
Plain Carbon
Steel
hardening
Carbon steel
for case
hardening
520 Case
C 14
500-750
650 Case
2.28
Design of Transmission Systems
Material
IS
Specification
Tensile
strength
Brinell
Hardness
N/mm 2
number
Direct
40 Ni 2 Cr 1
1500
44
hardening
Alloy steels
Mo 28
30 Ni 4 Cr 1
1000-1150
1150
400-500
400-500
35 Ni 1 Cr 60
40 Ni 3
750-1050
400-500
Alloy Stells
for case
17 Mn 1 Cr 95
15 i2 Cr 1 Mo
800-1100
1040
650 Case
630 Case
hardening
15
13 13 Ni 3 Cr
900-1200
1200-1500
600-620 Case
600-650 Case
80
15 Ni 4 Cr 1
600-850
650 Case
>660
750 - 800 Case
15 Cr 65
Nitriding
40 Cr 2 A1 1
Alloy Steel
Mo 18
2.14 DESIGN OF STRAIGHT TOOTH SPUR GEAR
BASED ON STRENGTH AND WEAR CONSIDERATION
[LEWIS AND BUCKINGHAM EQUATION METHOD]
Lewis equation is used to find beam strength of gear,
whereas the Buckingham equation is used to determine the
maximum dynamic load and wear strength of the gears.
Step 1: For a given problem, note down the given
parameters like power, speed, gear ratio, etc.
Step 2: Selection of material
If material is not given, select a suitable material for
pinion and gear wheel based on - gear ratio (i)
[From PSG data book pg no: 8.4]
Spur Gears & Parallel Axis Helical Gears
2.29
Choose both pinion and gear as same material. (If
material is not given).
Pinion is the weekest materials. So design the pinion
gear alone, because Lewis equation is applicable for weaker
one of the two gears.
If both pinion and gear are made up of different
materials, determine the gear and pinion strength,
separately.
Strength of gear b2 y2
Strength of pinion b1 y1
where y1 and y2 are the Lewis form factor of pinion and
gear respectively
b1 and b2 are the bending stress of pinion and
gear respectively.
[Based on the weaker material, Design the gear drive]
[From PSG Data book Pg: 8.5 table: 7]
Step 3: Calculation of Tangential load F t
F t HP
75
kgf
vm
HP – Horse power
vm mean velocity in m/s
vm
d1 N 1
60 1000
m/s
d1 mm ; N 1 rpm
2.30
Design of Transmission Systems
750 Watts ; 1 kg f ~
10 N (Newton)]
[Note: 1 HP ~
Step 4: Calculation of Dynamic load F d
F d F t Cv
in kg f
Already we have calculated the value of the F t and
vm
C v velocity Factor (Refer PSG Data book Pg.No.8.51)
vm 10 m/s wheels for commercially cut
3 vm
Cv
;
3
wheels
6 vm
Cv
;
6
vm 5 20 m/s for carefully cut wheels
1
5.5 vm 2 v 20 m/s for precision wheels
m
Cv
5.5
Cv
1 vm
1 0.25 vm
For non-metallic gears.
Step 5: Calculation of strength of gear tooth (or) beam
strength F s
F s [ b] by P c
. .
[ . P c m]
[ b ] b y m
m module ; b face width
y Lewis form factor based on P c
Spur Gears & Parallel Axis Helical Gears
P c circular pitch
d1
Z
2.31
(cm)
If b is not given, then
assume b 3 to 4 times of P c
. .
[ . b 3P c o r b 4P c]
where,
[ b] is the design bending stress in kg f/cm2
but P c m ;
3 m to 4 m
b~
d
where, m module
Z
d1 Diameter of pinion (weaker gear)
Z no: of teeth on pinion. [If Z is not given, then assume
Z 17 to 25 teeth]
If [ b] is not given, choose the approximate value from
the PSG data book based on the material. [Table: 7, pg:
8.5]
Step 6: Calculation of module: m
For safe Design; F s F d
By Equating this two equations, determine the value
of module.
[Choose the standard module value from PSG Data
book: Table 1, pg no: 8.2]
2.32
Design of Transmission Systems
Step 7: Calculate the value of face width b
b 3 Pc
3m
10 m
b~
where, m module
Substitute the value of m, which is calculated from
previous step 6.
Step 8: Calculate pitch circle diameter d 1
d1 Z1 m
Step 9: Calculate pitch line velocity in m/min
V
where,
d1 N1
m 1000
m/min
[V m in m/min and
vm in m/s]
N 1 speed of pinion in rpm
d1 pitch circle dia. of pinion in mm
Step 10: Recalculate the beam strength Fs (or) strength
of gear tooth
F s [b] by P c
[ b ] b y m
Substitute the newly calculated m value
Step 11: Calculate by Buckingham’s Dynamic load F d
Refer PSG Data book P.No. 8.51
Spur Gears & Parallel Axis Helical Gears
2.33
0.164 V m cb F t
Fd Ft
cb F t
0.164 Vm 1.485
where, b face width in cm
c Deformation factor
F t Tangential load (or) transmitted load in kg f
V m in m/min
[Choose the “c” value from PSG Data book page no:
8.53 from table 41 and 42. According to quality and module,
select e - expected error in tooth profiles - mm from Table
42 and then table 41].
Step 12: Check for Beam Strength
For safe, F s Fd
Compare the both values
If F s F d, the design is not satisfactory, then the
values of “m ” and “b” should be increased to increase the
strength of gear tooth.
Step 13: Calculation of wear load Fw
F w d1 b Qk
Q is Ratio factor
Q
2i
for external gear
i1
Q
2i
for internal gear
i1
1
1
[2c ] sin
E1 E2
k
1.4
2.34
Design of Transmission Systems
k
–
Load stress factor kgf/cm2
[c]
Design contact stress in kg f/cm 2
E1
–
Young’s modulus of pinion (kgf/cm2)
E2
–
Young’s modulus of gear (kgf/cm2)
[Choose E 1 and E 2 from the PSG Data book pg: 8.14
from the table: 9 based on the material]
Pressure angle.
If is not given; take 15 to 20
To Calculate [c]
Select material and heat treatment process (surface
hardness) Refer PSG Data book P.No.8.16 assume HRC
value, take C R - value,
[c] CR HRC k cl
To find kcl assume life of drive 10,000 hrs to 20,000 hrs.
Life _____ hrs rpm 60 _____ cycles
Represent life N _____ 10 7 cycles
From P.No.8.17, according to material, and life in No.
of cycles (consider surface hardness) take kcl value.
Find [c] in kgf cm2
Step 14: Check for wear strength
For safe Design, F w F d
If F w F d; Design is not safe.
Step 15: Calculate the Basic Dimensions of spur gear
Spur Gears & Parallel Axis Helical Gears
2.35
Dimensions of Externally Meshing Gears:
Suffix 1 for Pinion and 2 for Wheel
Nomenclature
Notation Units
Module
m
mm
Normal module
mn
mm
Transverse module
mt
mm
Centre distance
a
mm
Height factor
f0
–
Spur Gears
m
2a
Z1 Z2
am
Z1 Z2
2
f0 1 (in special
f0 0.8, stub teeth)
Bottom clearance
c
mm
c 0.25m
(For stub teeth,
h 0.3m)
Tooth depth
h
mm
h 2.25 m (For stub
teeth
Pitch diameter or
Reference diameter
d
mm
d1 mZ1 ; d1 mZ2
Tip diameter
dc
mm
da1 Z1 2f0 m
da2 Z2 2f0 m
Root diameter
df
mm
df1 Z1 2f0 m 2c
df2 Z2 2f0 m 2c
Helix angle
deg
Number of teeth
Z
–
Virtual number of
Zv
teeth
Z1
2a
Z iZ1
m i 1 2
2.36
Design of Transmission Systems
Step 16: Draw the neat sketch of spur gear
p itch circle
L in e o f a ction
O utside
D ia
Pre ssure
a ng le
Too th profile
(involute)
Ba se circle
Pitch circle
W h ole depth
W orking
d ep th
C ircu lar too th
thickness
C le aran ce
Ad de nd um
D e de nd um
C e nte r
d istan ce
R o ot (to oth )
fille t
R o ot
D ia
C ircu lar
p itch
Fig: 2.14
Note: The Above Design procedure is same for Helical
gears, Worm and worm wheels and Bevel gears with slight
modifications.
Problem 2.1: Design and draw a straight spur gear drive to
transmit 35 kW. The pinion speed is 720 rpm and the speed
ratio is 2. Both the Gears are made up of the same surface
Hardened Carbon steel with 55 RC and core hardness less than
350 BHN. Ultimate strength is 720 N/mm2 and yield strength
is 360 N/mm2.
[A.U. May/June: 2007; Dec 2010]
Step 1:
Given: Power P 35 kW 35 10 3 W
Spur Gears & Parallel Axis Helical Gears
2.37
Speed ratio i 2
Gear material: Pinion and Gear are same material
(carbon steel) with 55 RC and core Hardness < 350 BHN.
Ultimate (stress) strength u 720 N/mm2
Yield strength (stress)
y 360 N/mm 2
Pinion speed
N 1 720 rpm
Step 2: Selection of Material
Pinion –
Carbon steel surface hardened with 55 RC
with core
Gear
Carbon steel Hardness less than 350 BHN
–
Both the gears are made up of same material, so
pinion is the weaker one. Design the pinion wheel.
Step 3: Calculation of tangential load F t
F t HP
i
N1
N2
75
vm
Z2
Z1
Assume Z 1 20
2
Z2
20
Z 2 40
vm
d1 N 1
60 1000
d2
d1
d1 Z1 m
d1
. .
. m
Z1
d1 mZ1
. .
. d1 20 m
2.38
Design of Transmission Systems
3.14 20 m 720
60 1000
vm 0.7539 m m/s
vm ~
0.7 m m /s}
P ower
35 10 3
HP
750
[ 1 H.P ~
750 watts]
46.666 ~
46.7
Ft
46.7 75
0.7m
Ft
5003.57
kg f
m
Step 4: Calculation of Dynamic load F d
F d F t C v kg f
Assume vm 12 m/s for determining the velocity
factor C v
Cv
6 vm
6
[vm 5 120
m/s,
for
wheels, Refer PSG Data book Pg.No. 8.51]
Cv
6 12
6
Cv 3 ;
Fd
5003.57 3
m
Fd
15070.71
m
carefully
cut
Spur Gears & Parallel Axis Helical Gears
2.39
Step 5: Calculation of strength of gear tooth
F s [b] b y P c
. .
. P c m
b 3 P c or
[b] b y m
b 10 m
[For carbon steel [b] 3200 kg f/cm 2 from PSG Data
book Pg: 8.5 table: 7]
Z1
2
. .
. Z 1 20
sin 2
sin 2
2
20
sin 2
1
10
sin
1
1
10
18.43 ~
20
then Lewis factor
y 0.154
0.912
Z1
For 20 involute
(from PSG Data book pg: 8.50)
0.154
0.912
0.1084
20
y 0.1084 and [ b] 3200 kg f/cm 2
F s 3200 10 m 0.1084 m
F s 10892.0320 m 2 kgf
2.40
Design of Transmission Systems
Step 6: Calculation of module m
For safe Design F s F d
10892.0320 m m
15070.71
m
m 3 1.378
m 1.112 cm
m 11.12 mm
(1 cm 10 mm)
(Choose module with nearest standard value from
Table 1 P.S.G Data book pg no: 8.2]
12 mm
m~
m 12 mm
Step 7: Calculate the value of face width b
b 10 m
10 12
b 120 mm
Step 8: Calculate the Diameter d 1
d1 Z1 m
20 12
240 mm
Step 9: Calculate pitch line velocity
vm v1
d1 N 1
60 1000
Spur Gears & Parallel Axis Helical Gears
2.41
3.14 240 720
60 1000
v1 9.0432 m/s
Step 10: Recalculate the beam strength Fs
F s [ b] b y P c
12
12
3200 10
0.1084 10
10
15692.4815 kg f
12
. .
[ . Pc m
10
y 0.1084 ; b 10 m in cm ]
Step 11: Calculate the Buckingham’s Dynamic load Fd
0.164 Vm cb F t
Fd Ft
cb F t
0.164 V m 1.485
v 9.0432 m/s
V m 9.0432 60 m/min
542.592 m/min
b 120 mm
12 c m
Ft
5003.57
kg f
m
5003.57
kg f
12
416.96 kgf
417 kg f
Ft ~
2.42
Design of Transmission Systems
Choose the “c” value from PSG Data book pg no: 8.53
table: 41 and 42.
Both pinion and gear are carbon steel 20
For 20 full depth; steel and steel, c 11860 e.
e 0.064
(m 12 and vm 9.0432 , in which vm is less than 10
m/s. For commercially cut wheels) [From table: 42; Data
book pg: 8.53]
c 11860 e
11860 0.064
759.04
0.164 V m cb F t
Fd Ft
cb F t
0.164 V m 1.485
0.164 542.592 759.04 12 417
F d 417
759.04 12 417
0.164 542.592 1.485
8476
417
3623.5 kg f
233.92
F d 3623.5 kg f
Step 12: Checking For Beam Strength
F d 3623.5 kg f
F s 15692.481 kg f
By comparing F d and F s, F s F d, so Design is safe.
Spur Gears & Parallel Axis Helical Gears
2.43
Step 13: Calculation of wear load Fw
F w d 1 Qkb
d 1 240 mm 24 c m ; Q
Q
2i
i1
(For external gear)
22
1.333
21
b 120 mm 12 cm ;
1
1
[2c ] sin
E1 E2
k
1.4
20 (Assume)
Take E 1 and E 2 from PSG Data book pg: 8.14
Table: 9 For steel both pinion and gear wheel.
E 1 2.15 10 6 kg f/cm 2 (pinion)
E 2 2.15 10 6 kg f/cm 2 (gear wheel)
[c] 9500 kg f/cm 2 is taken from the PSG Data book
pg: 8.4 table 7 gear material (for steel).
k
1
1
9500 2 sin 20
6
6
2.15 10
2.15 10
21
k 20.509 ~
1.4
2.44
Design of Transmission Systems
F w d1 Q kb
F w 24 1.333 21 12
8061.98 kg f
Step 14: Checking for wear strength
F w 8061.98 kgf
F d 3623.5 kg f
By comparing F w and F d ; F w F d, the Design is
satisfactory.
Step 15: Calculate the Basic Dimensions of spur gear.
From the PSG Data book pg: 8.22 table: 26
1. Module m 12 mm
Z1 Z2
2. Center Distance a m
2
20 40
12
2
360 mm
3. Height factor f0 1
4. Bottom clearance c 0.25 m
0.25 12 3 mm
5. Tooth Depth h 2.25 m
2.25 12 27 mm
6. Pitch Diameters d d 1 Z 1 m 20 12
240 mm
Z2
Z1
i
Z 2 2 20
40
Spur Gears & Parallel Axis Helical Gears
2.45
d2 Z2 m
40 12
480 mm
7. Tip Diameter dc : d c1 Z 1 2f0
20 2 1 12
264 mm
d c2 Z 2 2f0 m
40 2 1 12
504 mm
8. Root Diameter df : df 1 Z 1 2f0 m 2c
20 2 12 2 2
212 mm
df 2 Z 2 2f0 m 2c
40 2 12 2 2
452 mm
9. No: of Teeth: Z 1 20 ; Z 2 40
Step 16: Draw the neat sketch of spur gear.
[Refer the spur gear Fig 2.14 - Pg 2.36 Design
procedure step 16:]
Problem 2.2: Design a spur gear drive to transmit 22 kW at
1000 rpm ; Speed reduction is 2.5. The centre distance between
the gear shafts is approximately 350 mm. The materials used
are: pinion – C45, gear wheel – CI Grade 30. Design the Drive
[use Lewis and Buckingham equations].
2.46
Design of Transmission Systems
Step 1
Given data
22 kW 22 10 3 W
Power P
Pinion speed
N 1 1000 rpm
Speed ratio (i)
2.5
Center distance (a) 350 mm
Pinion material
C45 steel
Gear wheel material C.I Grade 30
Step 2: Selection of materials
Pinion – C45 steel
Gear wheel – C.I Grade 30
Step 3: Calculation of tangential load F t
F t HP
Power
75
kgf
vm
7
. .
. 1 watt
H.P
750
22 10 3
H.P
750
Power 29.333 H.P
vm
d1 N 1
60 1000
Centre Distance a
m/s
d1 d2
2
350 2 d 1 d2
d 1 d 2 700 mm d2 700 d1
Spur Gears & Parallel Axis Helical Gears
Speed ratio (i)
d2
d1
700 d1
d1
2.47
2.5
2.5
700 d 1 2.5 d1
700 3.5 d 1
Pitch circle dia. of pinion
d 1 200 mm
d 2 2.5 200
d 2 500 mm
vm
200 1000
10.466 m/s
60 1000
F t HP
75
vm
F t 29.333
75
10.466
F t 210.18 kg f
. .
10 N]
[ . 1 kgf ~
F t 2101.8 N
Step 4: Calculation of Dynamic load F d
F d F t C v kg f
Cv
Cv
6 vm
6
For vm 5 20 m/s
Here vm 10.466 m/s
6 10.466
6
C v 2.744
F d 210.18 2.744
2.48
Design of Transmission Systems
F d 576.733 kg f
Step 5: Calculation of strength of gear tooth Fs
The strength of gear tooth is calculated for weaker
gears.
Here, the pinion and gear wheel are made up of
different materials, so calculate for weaker one.
Strength of gear wheel b2 y2
From PSG Data book pg no: 8.5 table: 7
For Cast Iron Grade 30; In the PSG Data book;
C.I Grade 35 is available so take that value
b2 800 kg f/cm 2
For pinion: C45
b1 1400 kg f/cm 2
Lewis form factor
From the PSG Data book pg: 8.50
For
y 0.154
0.912
Z
For 20 involute (Assume)
y1 0.154
0.912
Z1
[Assume Z 1 20 teeth]
0.154
0.912
20
0.1084 pinion
For
y2 0.154
0.912
Z2
0.154
0.912
50
0.1357 gear
Z2
Z1
i
Z 2 2.5 20
Z 2 50
Spur Gears & Parallel Axis Helical Gears
2.49
Strength of gear wheel b2 y2
800 0.1357
108.608 kg f/c m2
Strength of pinion b1 y1
1400 0.1084
151.76 kg f/c m2
By comparing gear and pinion; gear is the weaker
material. So we have to design for the gear.
F s gear [ b2] b y2 Pc
800 3 m 0.1357 m
. .
. b 3Pc
3214.33 m m
Step 6: Calculation of module m
3m
For safe Design F s F d ;
3 m
3214.33 m m 576.733
Pc m
m2
576.733
3214.33
m module
m
0.179425
m 0.4235 cm
m 4.2 mm
The obtained module is 4.2 mm.
Choose the standard value of module from the PSG
data book pg: 8.2 table: 1
m 5 mm (standard value)
2.50
Design of Transmission Systems
Step 7: Recalculate the face width (b)
b 3P c
3m
35
47.12 ~
50 mm
Step 8: Recalculate Diameter d2 (gear)
. .
. Z2 50
d2 Z2 m
d 2 50 5
d 2 250 mm
Step 9: Recalculate the pitch line velocity (gear)
v2
d2 N 2
. . N1
i
.
N2
60 1000
250 400
60 1000
1000 i N 2
1000
N2
2.5
5.233 m/s
N 2 400 rpm
Step 10: Recalculate the strength of gear tooth
F s [ b2] b y2 P c
Substitute P c and m in cm.
50
5
0.1257
800
10
10
F s 852.196 kgf
Spur Gears & Parallel Axis Helical Gears
2.51
Step 11: Calculate the Buckingham’s Dynamic load F d
0.164 V m cb F t
Fd Ft
cb Ft
0.164 V m 1.485
b 5 cm ; F t 210.18 kg f
Choose c value from PSG Data book table 41 and 42
pg no: 8.53
Pinion and gear material 20 (Assume)
Steel and Cast Iron c 8150 e
e 0.025 (for carefully cut gear) in module “5”.
c 8150 e
8150 0.025
203.75
vm 10.466 m/s
Substitute V m in m/min. b in cm; F t in kg f
V m 10.466 60 m/min
627.96 m/min
0.164 V m cb F t
F d Ft
cb F t
0.164 V m 1.485
0.164 627.96 203.75 5 210.18
Fd 210.18
205.75
627.96
1.485
5
0.164
210.18
210.18
126561.8968
155.043
210.18 816.29
F d 1026.47 kgf
2.52
Design of Transmission Systems
Step 12: Check for Beam Strength
For safe Design F s F d
F s 852.196 kg f ; Fd 1026.47 kg f
F s F d ; so the Design is not satisfactory.
For safe Design, increase the value of m and b.
m 6 mm
b 10 m
b 60 mm
Recalculate
F s and F d
using
module
(m 6
mm)
substitute m and b in cm in equation.
F s [ b2] b y P c
6
800 6 0.1357
10
F s 1227.162 kg f
(1)
0.164 V m cb F t
Fd Ft
cb F t
0.164 V m 1.485
0.164 627.96 203.75 6 210.18
210.18
203.75 6 210.18
0.164 627.96 1.485
210.18
147545.1802
159.19
F d 1137.02 kg f
(2)
By comparing F s and F d,
Fs Fd
So, the Design is safe.
Spur Gears & Parallel Axis Helical Gears
2.53
Step 13: Calculation of wear load F w
F w d1 Qkb
b 6 cm
d1 200 mm 20 cm
Q
2i
i1
(For external gear) Mostly all the sums are external
gears only.
Q
2 2.5
2.5 1
1.4285
1
1
[2c ] sin
E 1 E2
k
1.4
From the PSG Data book pg no: 8.14, Table: 9
E 1 for C45 steel 2.15 10 6 kg f/cm2
E 2 C.I Grade 30 1.46 10 6 kg f/cm 2
20 Assum e
c 5000 kgf/c m2
[From PSG Data Book pg: 8.5 table:7; for C45 steel]
1
1
5000 2 sin 20
6
6
1.46 10
2.15 10
k
1.4
2.54
Design of Transmission Systems
5000 2 sin 20 1.15 10 6 9.8334
7.023 kgf/cm2
1.4
1.4
F w d 1 Qkb
F w 20 1.4285 7.023 6
1205.304 kg f
Step 14: Checking for wear strength
For satisfactory Design F w F d
F w 1205.304 1137.02 F d
So the Design is safe.
Step 15: Calculate the Basic dimensions of spur gear.
From the PSG Data book pg no: 8.22. Table: 26
1. Module 6 mm
2. Centre Distance (a) m
Z1 Z2
2
Z 1 20
20 50
6
2
Z 2 50
210 mm
where suffix 1 refers to pinion and suffix 2 refers to gear
wheel.
3. Height factor f0 1
4. Bottom clearance (c) 0.25 m 0.25 6 1.5 mm
5. Pitch or Reference d Diameter d 1 m Z 1
d1 6 20
Spur Gears & Parallel Axis Helical Gears
2.55
d1 120 mm
d2 m Z 2 6 50
d2 300 mm
6. Root Diameter df df1 Z 1 2f0 m 2c
d f1 20 2 1 6 2 1.5
105 mm
d f2 Z 2 2f0 m 2c
50 2 6 2 1.5
285 mm
7. Tip Diameter dc d c1 Z 1 2f0 m
20 2 1 6 132 mm
d c2 Z 2 2f0 m
50 2 6 312 mm
Problem 2.3: A Reciprocating compressor is to be connected
to an Electric motor with the help of spur gears. The distance
between the shafts is to be 500 mm. The speed of the electric
motor is 900 rpm and the speed of the compressor shaft is
desired to be 200 rpm. The torque to be transmitted is 500
N-m. Taking starting Torque as 25% more than the Normal
torque, Determine.
(a) Module and face width of the gears using 20 degree
stub teeth.
(b) Number of teeth and pitch circle diameter of each gear.
Assume suitable values of velocity factor and Lewis factor.
2.56
Design of Transmission Systems
Step 1
Given data: Distance
Distance) a 500 mm
between
the
shafts
(Centre
N 1 (pinion) 900 rpm (always pinion has maximum
rpm when compared to gear wheel)
N 2 gear 200 rpm
TorqueNormal 500 N m
So, starting Torque as 25% more than the normal
torque.
T max 1.25 T mean or normal
T max 1.25 500
625 Nm
625 10 3 N mm
[For this type of problems, it is not needed to design
a spur gear, Just find what is asked in Question]
Step 2: Selection of material
Material is not given in the problem. So, choose the
material from the PSG Data book pg: 8.4 Table: 5 based
on gear ratio (i)
i
From the table: 5
N2
N1
900
4.5
200
Spur Gears & Parallel Axis Helical Gears
2.57
i 4 ; pinion (material) C 45
gear wheel (material) cast steel
To calculate module value, we have to find the F s and
F d. F s will be calculated by using Lewis equation. [Lewis
equation is applicable for weaker gear]. So, we have to
determine, which is weaker one.
Pinion strength b y1
1
From PSG Data book pg: 8.5 table: 7;
b 1400 kg f/cm 2 [for C 45 material], b 3200 kg f/cm 2 [for
1
2
steel]
y 1 0.154
Z min or Z 1
0.912
Z1
(For 20 involute)
. .
( . 20 given)
2
sin2
2
2
sin 20
17.09 ~
18
y 1 0.1033
Pinion strength 1400 0.1033
144.66 kg f/cm 2
Gear strength
b y2
2
y2 0.154
0.192
Z2
(for 20 involute)
2.58
Design of Transmission Systems
Z2
Z1
i
Z 2 4.5 18
Z 2 81
y 2 0.154
0.192
81
y 2 0.1516
Gear strength 3200 0.1516
485.12 kg f/cm 2
By comparing pinion and gear strength, pinion is the
weaker material. So design for pinion.
Step 3: Calculate tangential load F t
F t HP
vm
d1 N1
60 1000
a
500
d1 d2
2
d1 d2
P
75
kg f
vm
2 N1 T max
60
2 900 625
60
P 58875 Watts
2
d1 d2 1000
d2 1000 d 1
P
58875
H.P
750
78.5 H.P
Spur Gears & Parallel Axis Helical Gears
d2
d1
i 4.5
1000 d1
d1
2.59
4.5
1000 d1 4.5 d1
1000 4.5 d1 d1
5.5d1 1000
d1 181.818 mm
d2 1000 d 1
1000 181.818
d2 818.1818 mm
vm
vm
d 1 N1
60
181.818 900
60 1000
vm 8.5636 m/s
F t 78.5
75
8.5636
F t 687.7 kg f
Step 4: Calculation of Dynamic load Fd
F d F t C v kg f
Cv
3 vm
3
C v 3.8545
[vm 8.5636 ]
2.60
Design of Transmission Systems
[vm 10 m/s; commercially cut wheel from Data book
pg: 8.51]
F d 687.5 3.845
2643.44 kg f
Step 5: Calculation of strength of gear tooth
F s [ b ] b y P c
b 1400 kg f/cm 2 [From PSG Data
1
book pg: 8.4 Table: 7]
F s 1400 10 m 0.1033 m
b 3 to 4P c
b 3Pc
b3m
4541.068 m m
Step 6: Calculation of module m
For safe Design, F s F d
4541.068 m m 2643.44
b 9.39 m
10 m
b~
m module
m 2 0.5821
Pc m
m 0.7629 cm
y1 lewis form
m 7.629 mm
factor for pinion
y1 0.1033
8 mm (Standard module from Data book pg: 8.2;
m~
table: 1).
We can also calculate module using the formula
m
2 500
2a
10.1010 (for standard value)
Z1 Z2 18 81
Take the “m” value largest of two values
Spur Gears & Parallel Axis Helical Gears
m 10 mm
Step 7: Calculate face width (b)
b 10 m
10 10
b 100 mm
Step 8: Calculate Diameter of gear and pinion:
d1 Z1 m
18 10
d1 180 mm
d2 Z2 m
81 10
d2 810 mm
Answer
(a) Module m 10 mm
Face width b 100 mm
(b) No. of Teeth on pinion Z 1 18
No. of teeth on gear
Z 2 81
Pitch circle Diameter of pinion d 1 180 mm
Pitch circle Diameter of gear
d 2 810 mm
2.61
2.62
Design of Transmission Systems
Problem 2.4: The following particulars of a single reduction
spur gear are given. Gear ratio 10:1, Distance between the
centres 660 mm approximately. Pinion transmits 50 kW at
1800 rpm. Involute teeth of standard proportions: Addendum
1 module with pressure angle of 22.5; Permissible normal
pressure between teeth 175 N per mm of width. Find
1. Standard module if no interference is to occur
2. No. of teeth on each wheel
3. The necessary width of the pinion
4. The load on the bearing of the wheels due to power
transmitted.
In this type of problem, it is not needed to design a
gear drive, Just find the values asked.
Given
Gear ratio (or) speed ratio (i)
10
10
1
Distance between the centres a 660 mm
P 50 kW 50 10 3 W
Power
Speed of pinion
N 1 1800 rpm
Pressure angle
22.5
Permissible normal pressure between teeth 175
N/mm of width.
1. Find the module (m)
m
d1
Z1
Z 1 minimum no: of teeth on pinion. Calculate the
minimum no: of teeth on pinion to avoid interference.
Spur Gears & Parallel Axis Helical Gears
Z1
2.63
2
sin 2
22.5
2
2
sin 22.5
13.6 ~
14
Z 1 14 teeth
a
660
d1 d2
2
d1 d2
2
2 660 d1 d2
d1 1320 d 2
i
10
d2
d1
d2
1320 d 2
13200 10d2 d2
13200 11d2
d2 1200 mm
d1 1320 1200
d1 120 mm
m
120
8.57 ~
8
14
m 8 mm (Standard module from Data book pg: 8.2
Table: 1]
2.64
Design of Transmission Systems
2. No: of teeth on each wheel: Z 1 and Z 2.
Corrected no: of teeth on pinion.
Z1
d1
m
120
8
Z 1 15
Z2
Z1
i ; Z 2 10 15
Z 2 150
3. The necessary width of the pinion
If permissible normal pressure between teeth 175
N/mm (unit load) of width is given, then to calculate face
width, use the following formula only.
b
Fn
Total Normal load
F n
unit load
Ft
cos
F t tangential load
To find Ft
F t HP
vm
75
vm
d1 N 1
60 1000
vm 11.3040 m/s
Power
50 kW
50000
H.P
750
120 1800
60 1000
Spur Gears & Parallel Axis Helical Gears
Power
2.65
66.666 H.P
Ft
66.666 75
11.3040
F t 442.32130 kg f
F t 4423.2130 N (Substitute F t in Newton)
Fn
Ft
cos
4423.2130
cos 22.5
Fn 4787.6512 N
b
Fn
un it load
4787.6512
175
b 27.358 mm
4. The load
transmitted.
on
the
bearings
where
power
is
The radial component of the normal load acting on
the tooth is the load on the bearings of the wheels.
So, Radial Road F r F n sin
4787.6512 sin 22.5
1832.154 N
1.832 kN
Fr 1.832 kN
2.66
Design of Transmission Systems
Problem 2.5: A motor shaft rotating at 1500 rpm has to
transmit 20 HP to a low speed shaft with a speed reduction
of 3. The teeth are 14 12 involute with 25 teeth on the pinion.
Both the pinion and gear are made of steel with a maximum
safe stress of 2000 kgf cm2. A safe stress of 400 kgf cm2 may
be taken for the shaft on which the gear is mounted and for
the key. Design a spur gear drive to suit the above conditions.
Assume starting torque to be 25% higher than the running
torque.
[AU Nov/Dec 2007, Apr/May 2009]
Given Data:
Speed of the pinion N 1 1500 rpm
Power P 20 HP
Speed reduction i 3
Pressure angle 14 12 invo lute
No . o f teeth on pinion Z1 25 teeth
Pinion and gear are made of same material
Therefore, the design is based on pinion.
Safe static stress [ b] 2000 kgf cm 2
[Note: The remaining data is used for designing the shaft]
Step 1: Find module m
Beam strength F S [b] b y P c
Assume, b Face width 3P c 3m ;
where m module in cm.
. .
[ . P c m]
Spur Gears & Parallel Axis Helical Gears
2.67
Beam strength F S [b] y 3 m m
[b] 3 2 m 2 y
y Lewis form factor 0.124
0.684
0.684
0.124
Z1
25
[ 14
1
involute]
2
y 0.09664
Beam strength F S 2000 3 2 m 2 0.09664
FS 5722.79 m2 kg f
... (1)
* Dynamic Load F d F t C v
F t Transmitted load HP
75
vm
vm mean velo c ity
75
20
19.634 m
76.398
kg f
m
d1 N 1
60 100
mZ 1 N 1
60 100
m 25 1500
60 100
vm 19.634 m m sec
d1 z1 m
Cv
6 vm
6
when vm 20 m sec (carefully cut gears)
6 19.634 m
6
Dynamic Load Fd F t C v
Fd
76.398 6 19.634 m
6
m
12.733 6 19.634 m
m
... (2)
2.68
Design of Transmission Systems
To find module, equate the above equations (1) and (2)
F s F d o r F s Fd
5722.79 m 2
12.733 6 19.634 m
m
449.44 m3 6 19.634 m
Calculate m
method
module in cm, by trial and error
Trial 1: m 0.5 cm
LHS 56.18
LHS RHS
RHS 15.817
Satisfactory but too big m
Trial (2): m 0.4 c m
RHS = 13.8536
LHS 28.764
LHS RHS:
Satisfactory but too big m
Trail (3): m 0.3 c m
LHS 12.134
LHS RHS
Trial (4): m 0.29 c m
RHS 11.69
Satisfactory
LHS 10.96
LHS RHS
RHS 11.69
Not Satisfactory
Therefore, the value of module (m) is in between 0.29
and 0.3. Standard module 3 mm.
(P.No. 8.2 table 2)
Take m 0.3cm 3 mm
module m 3 mm
Face width b 3 m 3 3
b 28.274 mm
Spur Gears & Parallel Axis Helical Gears
2.69
CHECK FOR BEAM STRENGTH AND
WEAR STRENGTH
Step 2: Checking for Beam strength
Buckingham’s dynamic Load
0.164 V m cb F t
Fd Ft
cb F t
0.164 V m 1.485
76.398 76.398
254.66 kg f
m
0.3
V m 19.634 0.3 60 353.412 m min
Ft
b face width 2.8274 cm
carefully c ut gears e 0.025 mm
c 11440 e 11440 0.025
286 kg f cm
F d 254.66
[Ref PSG Data book
Pg.No 8.53 Table 4.2]
0.164 353.412 286 2.8274 254.66
0.164 353.412 1.485
286 2.8274 254.66
254.66
61628.2
254.66 579.31
106.382
Fd 833.97 kg f
F s 5722.79 m 2
5722.79 0.3 2 515.05
Fs 515.05 kg f
Fs Fd,
Here F s is not greater than F d.
Therefore, the design is not satisfactory based on
beam strength. So m can be increased to 0.4 cm and found
not satisfied and increase to 0.5 and now satisfied
2.70
Design of Transmission Systems
Ft
76.398 76.398
152.796 kgf
m
0.5
V m 19.634 0.5 60 589.02 m /m in
b 3 m 3 0.5 4.712
Fd 152.796
0.164 589.02 286 4.712 152.796
286 4.712 152.796
0.164 589.05 1.485
190.995
144940
1131.43 kg f
154.12
F s 5222.79 0.5 2 1430.69 kg f
Here F s F d satisfied.
Step 3 Check for wear strength
Wear Load FW d1 Q k b
d1 m Z 1 0.5 25
[ c] C R HRC K Cl
12.5 mm 1.25 c m
Q
23 6
2i
1.25
i1 31 4
b 4.712 c m
k [c]2
sin 1
1
1.4 E 1 E 2
Assume alloy steel, case
hardened
C R 280; HRC 55 to 63
take HRC 60
assume life 10,000 hrs.
Life N 10,000 60 1500
90 10 7 cycles
Pressure angle 14.5
K Cl 0.585
Pinion and wheel are made of [c] 280 60 0.585
same material
9828 kgf cm2
E 1 E 2 2.15 10 6 kg f cm 2
Spur Gears & Parallel Axis Helical Gears
2.71
[From PSG Data book Pg. 8.14, Table 9]
k 9828 2
sin 14.5
1
1
6
6
1.4
2.15 10
2.15 10
16.069 kgf cm 2
Wear load F W d 1 Qkb
Wear load F W 12.5 1.5 16.069 4.712
F W 1419.69 kgf
Since, F W 1419.69 Fd (1131.43)
Therefore, the design is satisfactory based on wear
strength
Final values:
m module 5 mm 0.5 c m
b Face width 4.712 c m
Problem 2.6: Design a spur gear drive, from consideration of
dynamic load and wear, to transmit 120 HP at 600 rpm to
shaft running at 150 rpm. Assume 10 mm module and 20
full depth involute system. The pinion is to have 20 teeth and
is
made
of
6
2 10 kgf/cm
heat
2
treated
steel
having
value
of
2
E
as
and safe static stress of 2000 kg/c m . Assume
suitable material for gear.
Given Data:
Power
P 120 HP
Pinion speed
N 1 600 rpm
Gear speed (Shaft speed) N 2 150 rpm
2.72
Design of Transmission Systems
m 10 mm 1 cm
Module
Pressure angle 20
No. of teeth on pinion Z 1 20 teeth
E 2 10 6 kgf/cm 2
Safe static stress [ b ] 2000 kg f /cm 2
From PSG Databook, (Page No. 8.50 and 8.51)
Beam strength FS [ b ] b y Pc
Assume
[ b ] b y m
b Face width
FS 2000 9.424 0.1084 1
3 to 4 Pc and
Pc m
2
b 3Pc 3m
FS 6418.66 kgf/cm
3 1 9.424 c m
b 9.424 cm
y 0.154
0.154
0.912
Z1
0.912
y 0.1084
Step 2
Transmitted load F t HP
120
75
vm
75
6.283
1432.43 kg f
F t 1432.43 kgf
20
Spur Gears & Parallel Axis Helical Gears
2.73
vm me an velocity in m/sec
But d1 mZ 1
d 1N 1
60 100
Z 1mN 1
60 100
20 1 600
60 100
vm 6.283 m/sec or
V m 371.99 m/min
b 9.424 cm
V m 6.288 60 371.99 m/min
Step 3 : Check for beam strength
Buckingham’s dynamic load
0.164 V mcb F t
Fd Ft
cb Ft
0.164 Vm 1.485
c 11860 e
c 11860 0.09
; e 0.09
1067.4 kg/cm
Refer PSG Data book Pg No. 8.53 table 41
0.164 371.99 1067.4 9.424 1432.43
F d 1432.43
1067.4 9.424 1432.43
0.164 371.99 1.485
1432.43
701061.15
220.196
1432.43 3183.80
F d 4616.235 kg f
2.74
Design of Transmission Systems
But F S 6418.66 kg f
FS 6418.66 Fd 4616.235
Therefore, the design based on beam strength is
satisfactory.
Step 4 Check for Wear load.
d1 mZ 1 10 20
200 mm 20 cm
Wear load F w d1Q k b
k [ c ]2
sin 1
1
1.4 E 1 E 2
Assume both pinion and gear are made of
same material.
E 1 E 2 2 10 6 kg f/cm 2
To calculate [ c ]
Select material, heat treatment process (Refer PSG
Data book page 8.16)
Assume alloy steel, case hardened
HRC 55 to 63
C R 280
Take HRC 60
[ c ] C RHRC Kcl
Assume life 10,000 hrs
N 10,000 600 60
280 60 0.585
9828 kg f/cm 2
36 10 7 cycle
From PSG Data book table
(17) P.No. 8.17
K cl 0.585
pressure angle 20
Spur Gears & Parallel Axis Helical Gears
k [ c ]2
2.75
sin 1
1
1.4
E2
E
1
9828 2
sin 20
1
1
1.4 2 10 6 2 106
k 23.59 kg /cm2
Wear load F w d 1 Q k b
20 1.6 23.59 9.424 7113.989 kgf
But
F d 4616.235 kg f
FW 113.9 Fd 4616.235
Therefore, the design is satisfactory based on wear
strength.
Since F S F d and F W F d,
Therefore, the design is satisfactory based on beam
strength and also based on Wear strength.
Problem 2.7: An electric motor is to be connected to a
reciprocating pump through a gear pair. The gears are
overhanging in their shafts. Motor speed 1440 rpm. Speed
reduction ratio 5. Motor Power 36.8 kW. The gears are to
have 20 pressure angle. Design a spur gear drive.
[April/May: 2010] (Nov-Dec-2009)
[Similar to problem 2-1]
2.76
Design of Transmission Systems
Problem 2.8: Design and draw spur gear drive transmitting
30 kW at 400 r.p.m. to another shaft running approximately
at 1000 r.p.m. The load is steady and continuous. The material
for the pinion is cast steel and for gear is cast iron. Take
module as 10 mm. Also check the design for dynamic load and
wear.
[May/June: 2014]
[Similar to problem 2-1]
Problem 2.9: A motor shaft rotating at 1440 rpm has to
transmit 15 kW power to a low speed shaft rotating at 500
rpm. A 20 pressure angle involute tooth gear – pinion is used.
The pinion has 25 teeth. Both gear and pinion are made of
cast iron having allowable strength of 55 N/mm2. Design a
suitable gear drive.
[Nov-Dec: 2007]
[Similar to problem 2.1]
Problem 2.10: A motor shaft rotating at 1440 rpm has to
transmit 15 kW to a low speed shaft rotating at 500 rpm. The
teeth are 20 involute with 25 teeth on the pinion. Both the
pinion and gear are made of cast iron with a maximum safe
stress of 56 MPa. A safe stress of 35 MPa may be taken for
the shaft on which the gear is mounted. Design and sketch the
spur gear drive to suit the above conditions. The starting torque
may be assumed as 1.25 times the running torque.
[Nov-Dec: 2009]
[Similar to problem 2.5]
Spur Gears & Parallel Axis Helical Gears
2.77
2.15 DESIGN OF SPUR GEAR [HERTZ METHOD]
[Note: Always solve the problem by using Lewis and
Buckinghams equation method. If the life of gears is given
in the problem (or) Design the gear drive based on contact
stresses, then use this Hertz method.
Design Procedure
Step 1: Selection of material (Refer PSG Data book Page
No 8.4)
Note (a): If the material for both pinion and wheel are
same, then design for pinion alone. (because the pinion is
weaker than Gear).
Note (b): If the material for pinion and wheel are
different, pinion is to be designed first and then, Check the
design stresses for both pinion and wheel.
From PSG Data book Page No 8.4: Selection of
material based on gear ratio (i)
From PSG Data book Page No 8.16: Selection of
material based on Heat treatment process.
If case hardness or surface hardness 350 BHN
then its core hardness 350 BHN
If surface hardness is greater than 350 BHN, then
represent in HRC.
Step 2: Calculate the Life in number of cycles; (N)
Note (a): If life required is not given in the problem,
assume N 10,000 hrs to 20,000 hrs.
Note (b): If the life required is given in hrs.
2.78
Design of Transmission Systems
Life in cycles life in hrs 60 rpm
...... cycles
and write in the form of
N ..... 10 7 cycles
Step 3: Calculation of Equivalent Young’s modulus.
From PSG Data book Page No. 8.14
Always pinion is made of steel with
E 2.15 10 6 kg f/c m2
Wheel is made of steel, CI, Bronze or Nylon.
Take the equivalent Young’s modulus E eq in kgf /cm 2
Step 4: Calculation of Design bending stress [ b]
From PSG Data book Page No. 8.18
Assume rotation in one direction only.
[b]
1.4 kbl
n k
1
kbl Life factor for bending - From PSG Data book
Page No. 8.20; Table: 22
Take the value of kbl, based on
1. Material
2. Surface hardness (always 350
3. Life in No. of cycles N
n factor of safety - From PSG Data book Page No.
8.19; Table: 20
Spur Gears & Parallel Axis Helical Gears
2.79
Take the value of n, based on
1. Material
2. Mode of Manufacture
3. Heat treatment.
k fillet stress concentration fa ctor -
From PSG Page No. 8.19 Table: 21
Take the value of k, based on
1. Material and heat treatment
2. Addendum Modification
always 0 X 0.1 value)
Coefficient,
X
(take
1 Endurance limit stress in bending for complete
reversal of stresses. kg f/cm 2
From PSG Data book Page No. 8.19; Table: 19
Take the equation based on material of mating gear
In the above equation take the values of
u ultimate stress in kgf/cm 2 and
y yield stress in kg f/cm 2
From PSG Data book Page No. 1.9 (for C15, C20, C15
Mn 35, C40, C45)
From PSG Data book Page No. 1.13 to 1.15 (for alloy
steels)
From PSG Data book Page No. 1.4 (for cast iron) (only
u value)
2.80
Design of Transmission Systems
Substitute all the values and calculate the design
bending stress [ b] in kg f/cm 2
Step 5: Calculation of Design contact stress [c]
From PSG Data book Page No 8.16
[ c] C B HB kcl 1 If hardness represented in BHN
(or)
[ c] C R HRC kcl 2 If hardness represented in HRC
The value of C R depends on
1. Wheel material
2. Heat treatment process
3. Surface hardness.
HB - Brinell hardness number
HRC - Rockwell ‘C’ hardness number
C B and C R - Coefficient depending on the surface
hardness.
kcl - Life factor - From PSG Data book Page No. 8.17
Table: 17
Take the value of kcl , based on Ka
10 2
;
N
N -no. of cycles
1. Material
2. Surface hardness (consider surface hardness
generally 350 HB
3. Life in number of cycles N
Spur Gears & Parallel Axis Helical Gears
2.81
Substitute all the values in the above equation and
calculate the design surface (contact compressive) stress
[c] in kg f/cm 2
Step 6: Calculation of design twisting moment [M t]
From PSG Data book Page No. 8.15
[M t] Mt k kd
M t Nominal twisting moment transmitted by
the pinion kgf cm
97420
hp
kW
71620
n
n
where kW or hp given power
n N 1 Speed of rotation of pinion, rpm.
Initially assume,
k kd 1.3 (Since k and k d values are not known).
Step 7: Calculation of approximate centre distance a
From PSG Data book Page No. 8.13
a i 1
3
2
0.74 E [M t]
[ ]
i
c
i Gear ratio
E Equivalent young’s modulus kgf/cm 2
[M t] Design twisting moment kg fcm
[c] Design surfac e contact compressive stress kg f/cm 2
2.82
Design of Transmission Systems
ratio between facew idth and centre distance
b
a
initially assume 0.3
Step 8: Calculation of Z 1 and Z 2
Z 1 no. of teeth on pinion
Z 2 no. of teeth on wheel
Assume Z 1 17 to 25 teeth (if Z 1 is not given in the
problem).
Since, i
Z2
Z1
,
(From PSG Data Book Page No. 8.1) Calculate Z 1
Step 9: Calculation of module. (From PSG Data book Page
No. 8.22)
m
2a
Z1 Z2
After calculation, take the nearest standard module
from PSG databook, Page No. 8.2 (Take always nearest
higher value).
Represent module ‘m’ in ‘millimeter’.
Step 10: Recalculate ‘a’ centre distance
a
m Z 1 Z 2
2
Represent centre distance ‘a’ in R10 SERIES in m.m.
Spur Gears & Parallel Axis Helical Gears
2.83
Step 11: Calculation of facewidth b
In Step 7,
b
0.3 assumed.
a
Face width b a 0.3 in m.m
Represent
1 mo d ule m
2 centre distance a
3 face width b
in millimeters
Step 12: Calculation of pitch line velocity V in m/sec.
v
d1 N 1
60
in metres
where
d1 pitch circle diam eter of pin io n in m eters m
N 1 speed of the pinion in rpm
But m module
d1
Z1
Calculate d1 in mm and convert into m.
Select Quality of Gears - From PSG Data book Page
No. 8.3
IS Quality depends on (1) type of gear
Cylindrical
Straight bevel
Spiral bevel
(2) Speed of gears in m/sec.
Select the IS Quality (Preferred Quality).
Step 13: To find the constants k and k d.
Load concentration factor k.
2.84
Design of Transmission Systems
Page No. 8.15, Table: 13 k values depends on P
b
d1
Calculate p and read the corresponding value of ‘k’
(assume bearings close to Gears and symmetrical)
Dynamic load factor kd – From PSG Data book Page
No. 8.16; Table: 15
kd value depends on
1. IS Quality
2. Pinion surface hardness
3. Pitch line velocity
4. Spur, helical, straight bevel and Spiral bevel
Read the value of k d.
Step 14: Recalculate the design twisting moment [M t]
[M t] M t k k d
The value of M t is similar to step (6).
Substitute the values of k and kd.
Calculate the design twisting moment [M t] in kg f cm.
Step 15: Checking of bending stress
i1
[M t] [b] From PSG Data book
amby
Page No. 8.13
b
where i gear ratio
a centre distance in c m
Spur Gears & Parallel Axis Helical Gears
2.85
m module in cm
b face width in cm
y form factor Re fer P SG Data book Page No. 8 .18
Value of y depends on
1. Z 1 no. of teeth on pinion
2. X 0 addendum modification coefficient.
Note
If b [b] then change the module, and recalculate
a, b and [M t]
Check again bending stress b
Step 16: Checking of surface (contact compressive) stress
c;
Refer PSG Data book Page No. 8.13
c 0.74
i1
a
i1
E [M ] [ ]
ib
t
c
If b [ b] and
c [c] then the design is satisfactory.
Step 17: Draw the neat sketch of spur gear.
Refer Pg 2.36 Fig. 2.14
Problem 2.11: Design a spur gear to transmit 22.5 kW at
900 rpm; speed reduction is 2.5; Material for pinion and wheel
are C15 steel and castiron grade 30 respectively. Take pressure
angle of 20 and working life of the gears as 10,000 hrs.
2.86
Design of Transmission Systems
Solution
Material Given: pinion C15 Steel
Wheel - Cast iron grade 30
Speed reduction i 2.5
i.e. Gear ratio i
Z2
Z1
2.5
Power P 22.5 kW
Pinion Speed n N 1 900 rpm;
Life
N 10,000 hrs
Step 1: Material properties
Refer PSG Data book P.No. 8.16; Table 16
Pinion: C15 (Given)
Assume C15 - Case hardened
HRC 55 to 63, assume HRC 60
i.e. Surface hardness 350 BHN
core hardness 350 BHN
Wheel: Cast Iron - GRADE 30
HB 200 to 260
Assume surface hardness HB 250 (Brinell hardness)
Core hardness 350
Step 2: Life required 10,000 hrs
10000 60 900 cycles
Life required N 54 10 7 cycles .
Spur Gears & Parallel Axis Helical Gears
2.87
Step 3: Calculation of Equivalent Young’s Modulus
Refer PSG Data book P.No. 8.14; Table 9
Pinion material - Steel - E 1 2.15 10 6 kg f /cm 2
Gear (or) Wheel material - C.I. Grade 30 E 2 1.4 10 6 kg f /cm 2
Therefore, equivalent young’s modulus
E 1.7 10 6 kg f /cm 2
Since u 28 kg f/mm 2
For CI Grade 30, the ultimate stress
2
u 30 kg f /mm
kg f cm 2
10
N
mm 2
(Convert into N/mm 2)
E 1.7 105 N /mm2
Step 4: Calculation of design bending stress [ b]
(Refer PSG Data book P.No. 8.18)
Design bending stress [ b]
1.4 kbl
n k
1
(assume rotation in one direction)
kbl Life factor for bending 1
From PSG Data book P.No. 8.20, Table 22
(Consider core hardness)
2.88
Design of Transmission Systems
K bl 1 (for N 10 7 cycles and BHN 350
n Factor of safety
From PSG Data book Table (20) P.No. 8.19
(for case hardend)
n2
k fillet stress concentration factor
Refer PSG Data book P.No. 8.19 Table (21)
1.2
1 Endurance limit stress in bending for complete
reversal of stresses
Refer PSG Data book P.No. 8.19; table 19
Assume C15 as forged
1 0.25 u y 500
steel,
for
forged
steel,
From PSG Data book P.No. 1.9 for C15 material.
u 37 to 49 kgf/mm 2
y 24 kg f/mm 2
select u 40 kg f/mm 2 40 100 kg f/cm 2
y 24 100 kgf/cm 2
1 0.25 40 100 24 100 500
2100 kg f /cm 2
Spur Gears & Parallel Axis Helical Gears
2.89
Design bending stress
[b]
1.4 kbl
n k
1
1.4 1
2100 1225 kg f/cm 2
2 1.2
(Convert into N/mm 2)
[b] 122.5 N/mm 2
Step 5: Calculation of Design surface Contact compressive
stress [ c]
Refer PSG Rate book P.No. 8.16
Design surface contact compressive stress
[ c] CR HRC kcl kgf/c m2
C R Coeff. depending on surface hardness
From PSG Data book P.No. 8.16 Table 16
C R 220 for C15, Case hardened
HRC 60 assumed
kcl Life factor Consider surface hard ness
(Table 17: P.No. 8.17 of PSG Data book)
kcl 0.585 for N 10 7 c yc les and surface hardness
350 BHN
[c] 220 60 0.585
[c] 7722 kgf/c m2 (Convert into N/mm 2
2.90
Design of Transmission Systems
Design surface (Contact compressive) stress
[c] 772.2 N/mm2
Step 6: Calculation of design torque [M t]
From PSG Data book P.No. 8.15
[M t] Mt kd k
M t 97420
kW
n
97420 22.5
900
2435.5 kg f cm
Initially assume, for symmetry scheme
kd k 1.3
[M t] 2435.5 1.3 3166.15 kg fcm
(Convert
into
N-mm)
[M t] 316615 Nmm
Step 7: Calculation of Approximate centre distance ‘a’.
From PSG Data book P.No.8.13
3
Centre distance a i 1
0.74
[ ]
c
i 2.5
[c] 772.2 N/mm2
from Step (5)
E 1.7 10 5 N/mm 2 from Step (3)
2
E[M t]
i
Spur Gears & Parallel Axis Helical Gears
2.91
[M t] 316615 N mm from Step (6)
b
a
Assume
b
0.3 from P.No. 8.14 table (10);
a
a 2.5 1
3
2
0.74
772.2
1.7 10 6 316615
2.5 0.3
a 142.74 mm;
Step 8: Calculation of Z 1 and Z 2
Assume Z 1 No. of teeth on pinion 25 teeth .
(Refer PSG Data book P.No. 8.1)
Speed reduction i
Z2
Z1
Z 2 No. of teeth on wheel i Z 1
2.5 25
62.5 teeth
Take Z 2 63 teeth
Step 9: Calculation of module Refer PSG data book (P.No.
8.22)
Take, Module m
2a
Z1 Z2
2 142.74 285.48
3.24 m m
88
25 63
2.92
Design of Transmission Systems
Take Standard module, from PSG Data book P.No.
8.2 Table (1)
module 4 mm
Step 10: Recalculate centre distance ‘a’ and rounded to
R10 series.
a
m Z1 Z2
2
4 25 63
2
Centre distance
a 176 mm Standard R10 series a 200 mm
Step 11: Calculation of face width b
value already assumed as 0.3 but
face width
b
0.3
a
b 0.3 200 60 mm
Step 12: Calculation of PCD d1 and PCD d 2
PCD of pinion PCD 1 d1 m Z 1
4 25 100 mm
PCD of wheel PCD 2 d2 m Z 2
4 64 252 mm
Step 13: Calculate of pitch line velocity: v
v
d1 N 1
60
m/sec
0.1
900
4.712 m/sec
60
Spur Gears & Parallel Axis Helical Gears
2.93
Step 14: Selection of Quality of Gear.
From P.No. 8.3, table (2);
at v upto 8 m/sec
Select the Quality of Gear - IS Quality 8
Step 15: Find load concentration factor k for IS Quality
8 Gear,
Refer PSG Data book P.No. 8.15; table (14)
k depends on p
b
value
d1
60
0.6
100
at p 0.6; the value o f k 1.03
Step 16: Find Dynamic load factor k d
Refer PSG Data book P.No. 8.16; Table (15)
For pitch line velocity up to 8 m /sec , cylindrical gears,
surface hardness 350 BHN
kd 1.4
Step 17: Recalculate, [M t] design twisting moment,
[M t] M t k d k
2435.5 1.4 1.03
[M t] 3511.99 kg f cm
[M t] 351199 Nmm .
M t 2435.5 kg fc m
[Refer PSG Data book
Pg. 8.15, Table 13]
2.94
Design of Transmission Systems
Step 18: Check b induced bending stress
Refer PSG Data book P.No. 8.13; table (8)
b
i1
[M t] [ b]
amby
[M t] 351199 N mm
i 2.5
a 200 mm
m 4 mm
b 60 mm
y form factor
Refer PSG Data book P.No. 8.18 table (18)
y value depends on X and Z value)
for Z 1 25; X 0 ;
y 0.4205
b
2.5 1
351199
200 X 4 60 0.4205
60.89 N/mm 2 [b] 1225 N/mm 2
Step 19: Check c induced surface (contact compressive)
stress
Refer PSG Data book P.No. 8.13, Table (8)
c 0.74
i1
ib
E [M ]
a
i1
t
Spur Gears & Parallel Axis Helical Gears
2.5 1
200
0.74
2.95
1.7 10 351199
2.5 60
2.5 1
5
483.34 N /mm 2 [ c] 772.2 N/mm 2
The design of pinion is satisfactory.
Step 20: Check the stresses in the wheel:
(a) Gear Material
Given - cast iron - Grade (30)
Since contact area is same,
c
wheel
c
pinion
483.34 N /mm 2 (Already calculated)
Life of Wheel
N Wheel
N pinion
2.5
54 10 7
21.6 10 7 cycles
2.5
From PSG Data book P.No. 8.16,
[c] design surface contact compressive stress
C B HB k cl
For CI - Grade (30) HB = 200 to 260 BHN take HB
= 260 BHN, C B 23 ;
HB 260
kcl from PS G Data b ook P.No. 8.17, table (17)
6
10 7
N
6
10 7
21.6 10 7
0.5992
2.96
Design of Transmission Systems
[c] 23 260 0.5992 3583.216 kgf /cm 2
Convert into N/mm 2
358.3216 N/mm 2
c 483.34 [ c] 358.3216
The design of wheel is not satisfactory.
Therefore, change the
recalculate [c] and c [c]
material
of
wheel
and
Select another material,
From PSG Data book P.No. 8.16; Table 16
Select either C40 or C45 Steel; k cl Surface > 350
hardness
Heat treatment - Surface
N 25 10 7
hardened.
Select C40 - Surface hardened
HRC 40 to 55
Assume HRC 50 ; C R 230 ;
10 7
N
= 0.5992
kcl 0.5992
Design surface [ c] C R HRC kcl
Contact Compressive stress
[ c] 230 50 0.5992 6890.8 kg f /cm 2
[c] 689.08 N/mm 2
Spur Gears & Parallel Axis Helical Gears
2.97
c 483.34 [c] 689.08
Therefore the selection of material C40, Surface
hardened is satisfactory.
Checkup of b induced bending stress;
b y1 b y2
1
2
[b ]2 - design bending stress of wheel
2
1.4 k bl
k n
b [b]2
2
Find [b]2
1
wheel
at Z 63 ; x 0 by interpolation.
wheel
Design bending stress
[ b]wheel
1.4 k bl
k n
1
kbl 1 From PSG Data book P.No. 8.20 table (22)
350 BHN core hardness; N 10 7
n 2.5 From PSG Data book P.No. 8.19 table (20)
k 1.5 From PSG Data book P.No. 8.19 table (21)
[b] wheel
1.4 1
2825
2.5 1.5
[b] wheel 105.46 N/mm 2
2.98
Design of Transmission Systems
Pinion:
b 77.49 N/mm 2
1
y1 0.4205
Wheel
b Induced ben ding stres s
2
(to be calculated)
y2 0.4927
b y 1 b y 2
1
2
b
2
77.49 0.4205
0.4927
66.13 N/mm 2
b 66.13 [b]2 105.46 N/mm2
2
Gear design is satisfactory.
Problem 2.13: In a spur gear for a rock crusher, the gears
are made of case hardened steel. The pinion is transmitting
18 kW. at 1200 rpm, with a gear ratio of 3.5; The Gear is to
work 8 hrs/day for 3 years. Design the drive.
[May, June 2009],(Oct. ’96)
Given Data:
Power to be transmitted 18 kW
Speed 1200 rpm
Gear ratio i 3.5
Life required 8 hr day for 3 years
8 365 3
8760 hrs
Spur Gears & Parallel Axis Helical Gears
2.99
Step 1
Selection of material
Assume pinion and wheel are made of same material.
Design only pinion
(Because pinion is weaker
than wheel)
From PSG Data book - P.No. 8.16, Table 16
Select Alloy Steel - Case Hardened
Surface hardness 55 to 63
HRC 55 to 63
Assume HRC 60
i.e, case hardness 30 BHN
There fore core hardness 350 BHN
Step 2
Required Life 8760 hrs given
N 8760 60 rpm
8760 60 1200 63.07 10 7 cycles
Step 3
Refer PSG Data book pg. 8.14 Table (9)
for steel (both pinion and gear)
E eq. 2.15 10 6 kg f cm 2
Step 4
Calculation of Design bending stress [b]
Refer PSG Data book P.No. 8.18
Assume, rotation in one direction only.
2.100
Design of Transmission Systems
[b]
1.4
kbl
n. k
1
kbl Life factor for bending
From PSG Data book
P.No . 8.20 Table 22
(Always consider core hardness)
Life in cycles
Hrs 60 rpm
8760 60 1200
63.07 10 7 cycles
350 BHN
for
350 BHN
7
and life 10 cycles
surface hardness
The value of kbl 1
n factor of safety, from PSG Data book P.No. 8.19,
Table 20 (for steel and case hardened)
n2
k Fillet stress concentration factor
From PSG Data book P.No. 8.19, table (21)
Consider always Addentum modification coefficient.
0 0.1
for case hardened steel.
the value of k 1.2
1 Endurance limit in bending kg f cm 2
Spur Gears & Parallel Axis Helical Gears
2.101
From PSG Data book P.No. 8.19, table 19 for alloy
steel,
1 0.35 u 1200
where u ultimate tensile stress kg f cm 2
For u value, refer PSG Data book P.No. 8.5 table
No.7
u 155 kgf mm 2
assume u 160 kg f mm 2 convert into kgf cm 2
160 102 kgf cm 2
1 0.35 160 10 2 1200
6800 kg f cm 2
Design bending stress
[b]
1.4 kbl
n k
1
1.4 1
6800
2 1.2
[b] 3966.66 kg f cm 2
Step 5
Calculation of design contact compressive stress [ c]
P.No. 8.16
[c] C R HRC kcl
C r coefficient depe nding on su rfa ce hardness
From PSG Data book P.No.8.16, table (16)
2.102
Design of Transmission Systems
for alloy steel and case hardened
280
HRC 60 assumed in the step 1
kcl Life factor steel
From PSG Data book P.No.8.17, table 17
N 63.07 10 7 cycles}
For su rface hardness 350 and N 25 10 7}
kcl 0.585
[ c] D esign surface contact compressive stress
C R HRC . k cl
280 60 0.585
[ c] 9828 kg f cm2
Step 6
Calculation of Design torque (or) twisting moment)
Refer PSG Data book P.No.8.15
[M t] Design twisting moment
M t kd k
Mt
nominal twisting moment transmitted by the
pinion - kg f cm
97420
kW
n
Spur Gears & Parallel Axis Helical Gears
97420
2.103
18
1461.3 kg f cm
1200
Step 7
Calculation of Approximate centre distance (a)
a i 1
3
2
0.74 E [M t]
[ ] i
c
i 35
[c] 9828 kg f cm 2
(+) for external
E 2.15 10 6 kgf cm 2
fo r Internal
[Mt] 1899.69 kg f cm
0.3,
Assume PSG Data book
a
table 10, P.No. 8.14
3
0.74
9828
2
12.61 cm
2.15 10 6 1899.69
3.5 0.3
125 mm
(From R10 series)
Step 8
Assume Z 1 20 teeth ,
a 125 mm
From PSG Data book Page No. 8.1
Z2
Z1
i
Z 2 20 3.5 70 teeth
2.104
Design of Transmission Systems
Step 9
Calculation of module (Refer PSG Data book P.No.
8.22)
Module m
2 125
2a
2.77 mm
Z 1 Z2 20 70
Take standard module, m 3 mm
From PSG Data book P.No. 8.2 table No. 1
Step 10: Recalculate ‘a’ centre distance
a
m Z 1 Z 2
2
3
20 70 135 mm
2
Take R10 series,
Centre distance a 135 mm
Step 11: Calculation of ‘b’ face width
Refer PSG Data book P.No.8.1,
b
0.3
a
are given in Pg. 8.14, table 11
Face w idth b 0.3 a
0.3 135 40.5 mm
Step 12: Calculation of P.C.D. d1
From PSG Data book P.No. 8.22
PCD of pinion d1 mZ 1 3 20 60 mm
Spur Gears & Parallel Axis Helical Gears
2.105
Step 13: Calculation of pitch line velocity
From PSG Data book P.No: 8.15
v
d1 N1
60 1000
60 1200
3.769 m/sec.
60 1000
Step 14: Select preferred Quality
From PSG Data book Table 2: Page No. 8.3
Above 1 m/sec to 8 m/sec
Preferred Quality IS 8
From the table 2, based on peripheral speed (or) pitch
line velocity.
Step 15: Calculation of kd and k
Cal. of p
b
d1
*In the previous step, kd and k values were assumed
as 1.3;
Now cal. kd and k value.
p
40.5
0.675 0.8
60
Step 16: Take the value of k. (Load concentration factor)
From PSG Data book P.No: 8.15 table 14
IS 8 Quality, at p 0.8
the value of k 1.06 (assume any one condition)
k 1.06
2.106
Design of Transmission Systems
Step 17: Select kd: Dynamic Load factor
From PSG Data book Table 15; P.No: 8.16
for IS 8 Quality, Cylindrical gears,
Pinion surface hardness 350 ;
Pitch line velocity up to 8 m/sec
Dynamic load factor k d 1.4
Step 18: Recalculate Design twisting moment [M t]
[M t] M t kd k
M t 1461.3 kgcm
1461.3 1.4 1.06
k d 1.4
Refer PSG Data
book Pg 8.15, table 13
2168.5692 kg fcm
k 1.06
Step 19: Checking of bending stress
From PSG Data book P.No. 8.13 table 8
b
i1
[M t] [ b]
amby
[M t] 2168.5692 kgfcm
i 3.5 ;
a 135 mm 13.5 cm
m 3 mm 0.3 c m
b 40.5 mm 4.05 cm
y form factor
- From PSG Data book P.No. 8.18
table (18)
addendum modification coefficient x 0
Spur Gears & Parallel Axis Helical Gears
2.107
for Z 20, and x 0
y 0.389
b
3.5 1
[2168.5692 ]
16 0.3 4.05 0.389
1088.8 kg f/cm 2 [ b] 3966.66 kg f/cm 2
Design based on bending stress is satisfactory.
Problem 2.13: Desin a spur gear pair to transmit 1.5 kW at
1440 rpm from an electric motor to an air compressor running
at 720 rpm. Take the working life as 10,000 hrs. Material to
be used is cast iron grade 25 for both pinion and wheel.
[Nov/Dec: 2010]
[Similar to problem: 2.12]
Problem 2.14: Design a straight spur gear drive. Transmitted
power 8 kW. Pinion speed 764 rpm. Speed ratio is 2. The gears
are to be made of C45 steel. Life is to be 10,000 hours.
[May/June 2013]
Given Data
Power P 8 kW ; Pinion speed n N 1 764 rpm;
Speed reduction i 2; N 10,000 hrs
Solution
Since the gears are of same material, design only
pinion
Step 1: Material properties
Since material of gears are C45 steel from PSG Data
book, Pg.No. 8.16, Table 16
For C45 steel, Assume surface hardened
2.108
Design of Transmission Systems
HRC 40 to 55
Assume HRC 55 ; C R 230
Step 2
Life required 10,000 Hrs 10,000 60 764
Life required N 45.84 10 7 cycles
Step 3
Calculation of Equivalent Young’s Modulus
From PSG Data book, Pg.No. 8.14, Table 9,
E 2.15 10 6 kg f/c m2 2.15 10 5 N/mm2
Step 4
Calculation of design bending stress [ b]
From PSG Data book, Pg.No. 8.18
[ b]
1.4 kbl
n k
1
[assume rotation is in one direction only]
where k bl Life factor for bending
From PSG Data book, Pg.No. 8.20, table 22
kbl 1
From PSG Data book, Pg.No. 8.19, Table 21
k stress concentration factor
Assume
surface
hardened
steel,
modification cofficient ‘X’ 0 X 0.1
k 1.5
Addendum
Spur Gears & Parallel Axis Helical Gears
2.109
From PSG Data book, Pg.No. 8.19, Table 19
1 Endurance limit stress in bending for complete
reversal of stresses
For forged steels
1 0.25 u y 500
From PSG Data book, Pg.No. 1.9,
corresponding to C45 steel
u 63 to 71 kg f/mm2 71 kgf/mm 2 assume
71 100 kg f/cm 2 7100 kgf/cm 2
y 36 kgf/mm 2 36 100 kgf/cm 2 3600 kgf/cm 2
1 0.25 7100 3600 500 3175 kg f/c m2
From PSG Data book, Pg.No. 8.19, Table
corresponding to steel, forged, surface hardened
20
n 2.5
Design bending stress [b]
1.4 1
3175 kg f/cm 2 1185.33 kgf/cm 2
2.5 1.5
[ b] 118.53 N /mm 2
Step 5
Calculation
of
Design
compressive) stress [ c]
surface
From PSG Data book, Pg.No. 8.16,
(contact
2.110
Design of Transmission Systems
[c] C R HRC k cl
From PSG Data book, Pg.No. 8.16, Table 16
corresponding to C45 steel, surface hardened
C R 230, HRC 55
From PSG Data book, Pg.No. 8.17,
corresponding to steel, surface hardness 7350
Table
17
kcl life factor 0.585
[ c] 230 55 0.585 7400.25 kgf/cm 2
[ c] 740.02 N/mm 2
Step 6
Calculation of design torque [M t]
From PSG Data book, Pg.No: 8.15
[M t] M t k d k
where M t 97420
8
kW
97420
1020 kg f cm
764
n
From PSG Data book, Pg.No. 8.15
Initially assume k d k 1.3
[M t] 1020 1.3 1326 kg f cm
[M t] 132600 Nmm
Spur Gears & Parallel Axis Helical Gears
2.111
Step 7: Calculation of Aproximate centre distance
‘a’
From PSG Data book Pg.No. 8.13
a i 1
Here
2
0.74 E [M t]
[ ]
i
c
3
b
a
From PSG Data book, Pg.No. 8.14, Table 10
Assume 0.3
a 2 1
3
2
2.15 10 6 1326
0.74
7400.2
2 0.3
a 10.865 cm a 108 mm
Step 8: Calculation of Z 1 and Z 2
Assume Z 1 number of teeth on pinion 25 teeth
From PSG Data book, Pg.No. 8.1
Speed reduction i
Z2
Z1
where Z 2 number of teeth on wheel
i Z1 2 25 50 teeth
Take Z 2 50 teeth
2.112
Design of Transmission Systems
Step 9: Calculation of module
From PSG Data book, Pg.No. 8.22
Take module m
2 108
2a
2.88 mm
Z 1 Z 2 25 50
From PSG Data book, Pg.No. 8.2, Table 1
Take standard module m = 3 mm
Step 10: Recalculate centre distance ‘a’
Since a
m Z 1 Z 2
2
3 25 50
112.5 mm
2
From PSG Data book, Pg.No. 7.20, rounding the
centre distance to R10 series
a 125 mm
Step 11: Calculation of face width b
Since is assumed as 0.3,
but
b
0.3
a
b 0.3 125 37.5 mm
Step 12: Calculation of PCD d 1 and PCD d 2
Pitch circle Diameter d 1 m Z 1 3 25
d 1 75 mm 0.075 m
Pitch circle diameter d 2 m Z 2 3 50
d 2 150 mm 0.150 m
Spur Gears & Parallel Axis Helical Gears
2.113
Step 13: Calculation of pitch line velocity v
Since
v
d1 N 1
60
0.075 764
3 m /s
60
Step 14: Selection of Quality of gear
From PSG Data book, Pg.No.
corresponding to velocity upto 8 m/s
8.3,
table
2,
Select the quality of the gear,
IS quality 8
Step 15: Load concentration factor ‘k’
From PSG Data book, Pg.No. 8.15, table 14
k depends upon p
p
b
value
d1
37.5
0.5
75
Corresponding to p 0.5
k 1.03
Step 16: Dynamic load factor “k d”
From PSG Data book, Pg.No. 8.16, table 15, for pitch
line velocity upto 8 m/s, cylindrical gears, surface hardness
350 BHN
kd 1.4
Step 17: Recalculate [M t] design twisting moment,
From PSG Data book, Pg.No. 8.15
[M t] Mt kd k 1020 1.03 1.4
2.114
Design of Transmission Systems
1470.84 kgf cm 147084 Nmm
Step 18: Checking induced bending stress b
From PSG Data book, Pg.No. 8.13, Table 8,
b
i1
[M t] [ b]
amby
From PSG Data book, Pg.No. 8.18, table 18, y
depends on X and Z value.
For Z 1, X 0
y 0.4205
b
21
140784
125 3 37.5 0.4205
71.42 N/mm 2 [b] 118.53 N/mm 2
Step 19: Check induced surface (contact compressive)
stress c
From PSG Data book, Pg.No. 8.13, Table 8,
c 0.74
i1
a
21
125
21
2.15 10 5 140784
2 37.5
0.74
i1
E [M t]
ib
617.97 N/mm 2 [c] 740.02 N/mm 2
The design is satisfactory.
Spur Gears & Parallel Axis Helical Gears
2.115
Problem 2.15: A motor shaft rotating at 1500 rpm has to
transmit 15 kW to a low speed shaft with a speed reduction
of 3:1. Assume starting torque to be 25% higher than the
running torque. The teeth are 20 involute with 25 teeth on
pinion. Both the pinion and gear are made of C45 steel. Design
a spur gear to suit the above conditions and check for
compressive and bending stresses and plastic deformation also
sketch the spur gear drive. [Design based on contact stress].
[Apr/May 2008]
Solution
Given data
Speed of driver N 1 1500 rpm
Po wer P 15 kW
Gear Ratio i 3
No of teeth on pinion Z1 25 teeth
Step 1
Selection of material (from P.S.G Data book Pg.No.
8.5)
C45, surface hardened to 55 RC
core hardness 350 BHN
u 720 N/mm2, y 360 N/mm 2
[b] 1400 kg f/cm 2
140 N/mm 2
[c] 5000 kgf/cm 2
500 N/mm 2
2.116
Design of Transmission Systems
Step 2
Calculation of design torque [M t]
From P.S.G Data book, Pg.No. 8.15
[M t] M t kd k 1.25
since starting torque is 25% higher than the running
torque
But M t 97420
kW
N1
97420
15
1500
974.2 kg f cm
Initially assume, for symmetry scheme
kd k 1.3
[M t] 974.2 1.3 1.25
1583.07 kgfcm
[M t] 158307 Nmm
Step 3
Calculation of Approximate centre distance ‘a’ from
P.S.G Data book, Pg.No. 8.13
a i 1
3
2
0.74 E [M t]
[ ]
i
c
From P.S.G Data book, Pg.No. 8.13
Spur Gears & Parallel Axis Helical Gears
2.117
E 2.15 106 kgf / cm2
2.15 10 5 N/mm 2
Assume
b
0.3 (from P.S.G Data book, Pg.No.
a
a 3 1
8.14)
3
2
0.74 2.15 10 6 15383.07
3 0.3
500
a 17.436 cm
a 174.36 mm
Step 4
Calculation of Z 1 and Z 2
Z1 25 assume
since
i3
From P.S.G Data book, Pg.No. 8.1
speed reduction i
Z2
Z1
Z 2 No. of teeth on wheel i Z 1
3 25
75 teeth
Step 5
Calculation of module
From P.S.G Data book, Pg.No. 8.22
Design of Transmission Systems
2.118
module m
2a
Z1 Z2
2 174.36
25 75
3.48 mm
Take standard module, from P.S.G Data book, Pg.No.
8.2
Module m 4 mm
Step 6
Recalculate centre distance ‘a’ and rounded to R10
series
a
m Z 1 Z2
2
4 25 75
2
a 200 mm
Step 7
Calculation of face width b
value already assumed as 0.3
but
b
0.3
a
face width b 0.3 200
60 mm
Step 8
Calculation of PCD d 1 and PCD d2
Spur Gears & Parallel Axis Helical Gears
2.119
PCD of pinion PCD 1 d1 m Z 1
4 25
100 mm
PCD of wheel
PCD2 d2 m Z 2
4 75
300 mm
Step 9
Calculation of pitch line velocity v
v
d1 N 1
60
m/s
0.1 1500
7.85 m/s
60
Step 10
Find load concentration factor k from P.S.G Data
book, Pg.No. 8.15
k depends on p
b
value
d1
60
0.6
100
at P 0.6, the value of k 1.03
Step 11
Dynamic load factor kd
from P.S.G Data book, Pg.No. 8.16
For pitch line velocity up to 8 m/s, cylindrical gears,
surface harndess 350 BHN
2.120
Design of Transmission Systems
kd 1.4
Step 12
Recalculate, [M t], design hoisting moment
[M t] M t kd k 1.25
974.2 1.4 1.03 1.25
1755.99 kg f cm
M t 175599 Nmm
Step 13
Check b induced bending stress
from P.S.G Data book, Pg.No. 8.13
b
i1
[Mt] [ b]
amby
31
[175599 ]
200 4 60 0.4205
1400 kg f/cm 2
139.19 N /mm2 140 N/mm2 ~
[y Form factor from P.S.G Data book, Pg.No. 8.18
y depends upon X and Z value
y 0.4205 ]
Step 14
Check c, induced surface stress
From P.S.G Data book, Pg.No. 8.13
c 0.74
i1
a
i1
E [M ] [ ]
b
t
c
Spur Gears & Parallel Axis Helical Gears
2.121
E 2.15 10 6 kg f/cm 2
c 0.74
4
200
2.15 10 1755.99
3 60
4
6
4286.82 kgf/cm 2 [ c] 5000 kgf cm 2
Design is safe
Step 15
Check for plastic Deformation:
M t - Rated Torque 1755.99 kg f c m
175.599 N m
Starting Torque 25% higher than starting Torque
(125%)
[M t]ma x
125%
Mt
100
1.25 175.599
219.49875 N m
2194.9875 kg f cm
Step 16
Check for Bending
b max b
[M t]max
Mt
1400
2194.9875
1755.99
1750 kgf cm
(Or)
b max 1.25 b 1.25 1400 1750 kgf cm
2.122
Design of Transmission Systems
[b]max 0.8 y 0.8 3600 2880 kgf/cm 2
For safe Design, [b]max b max
By comparing
satisfactory.
this
two
values,
the
Design
is
Step 17
Check for wear strength
c max c 1.25 4286.82 1.25
5358.525 kg f/c m2
[c]max 3.1 y 3600 3.1
11160 kg f/c m2
[c]max c
The Design is safe.
Problem 2.16: Design a spur gear drive to transmit 10 kW
at 1440 rpm, speed reduction is 3. Take pressure angle as
20 and working life of the gears as 15,000 hrs. Assume the
materials for pinion and wheel as heat treated cast steel and
high grade cast iron respectively.
[Nov; Dec: 2012]
[Similar to the problem: 2.12]
Problem 2.17: Design a spur drive to transmit 5 kW at 900
rpm of forged steel pinion 120 mm diameter to a cast steel
gear to run at 300 rpm. Take pressure angle of 20 and
working life of the gears as 10000 hrs.
[Similar to the problem 2.12]
[May/June 2012]
Spur Gears & Parallel Axis Helical Gears
2.123
2.16 HELICAL GEARS
For high pitch line velocities and heavy loads, helical
gears are used.
Two types of gearing are
(i) Single helical gears.
(ii) Double helical gears. (Herringbone gears)
When straight tooth spur gears begin to engage, the
contact theoretically extends across the entire tooth on a
line parallel to the axis of the gear. This sudden application
of load results in noisy operation and high impact stress.
In helical gearing, contact begins at one end of the
entering tooth and gradually extends along a diagonal line
across the tooth face as the gear rotates. The gradual
engagement of load application reduces the noise and the
dynamic load. Therefore, the operation is silent and hence
higher pitch line velocities can be employed.
(Generally pitch line velocities upto 20 to 35 m/sec)
Applications: Automobile Gears, turbines.
Herringbone Gears pitch line velocity upto 60
m/sec.
Since the teeth are
inclined to the axis of
rotation, helical gear is
subjected to an axial thrust.
To reduce axial thrust,
another helical gear of
opposite hand is to be
(b) D o ub le helica l
(a) Single he lical
g ea r
g ea r
Fig: 2.15
2.124
Design of Transmission Systems
provided. This arrangement is
called double helical Gear (or)
Herringbone gear.
cos
m
mn
Pc
PN
m
mn
Fig:2.16. Helical gear
(no menclature)
cos
where helix angle
(Real pitch) P Circular pitch along the plane
perpendicular to the axis.
Pm
Normal pitch P n
Circular pitch along the plane
perpendicular to the teeth.
Pn m n.
where helix angle
8 25 for helical gears
25 40 for herringbone gears.
where m n normal module in m.m.
2.17 BEAM STRENGTH OF HELICAL GEARS (LEWIS
EQUATION FOR HELICAL GEARS)
As discussed earlier in this chapter (spur gear), The
formative gear is an Imaginary spur gear in a plane
perpendicular to the tooth element. It is understood that
the beam strength of virtual (or) equivalent or formative
Spur Gears & Parallel Axis Helical Gears
2.125
gear is nothing but the beam strength of Helical gears.
Therefore a modified lewis equation is used to determine
the beam strength of a helical gear.
F s b [b] y Pc
where
Pc mn
F s Beam strength of Helical gear
m n normal module
b face width
P n normal pitch
[b] Permissible (or) Allowable static stress
y Tooth form factor (or) lewis form factor.
y 0.124
0.684
for 14 12 full depth Involute
Zv
0.154
0.912
for 20 Involute
Zv
0.175
0.95
for 20 Involute subteeth
Zv
Z v virtual number of teeth.
The beam strength F s indicates the maximum value
of tangential force that the tooth can transmit without
bending failure.
2.126
Design of Transmission Systems
2.18 DYNAMIC LOAD ON HELICAL GEAR TOOTH
(EFFECTIVE LOAD ON GEAR TOOTH)
As discussed in previous chapter, in addition to the
static load due to power transmission, there is dynamic
load between the meshing teeth. In order to account for
dynamic loads, the following two methds are used.
1. Approximate estimation of dynamic load using the
velocity factor, which is used in the initial stages
of gear design, and
2. Accurate estimation of dynamic load using the
Buckingham’s equation, which is used in the final
stages of gear design.
1. Calculation of initial dynamic load F d
The preliminary value of dynamic load can be
calculated by using the relation
where
F t tangential load in kg f
Fd Ft Cv
Ft
where
Power in Horse power 75
vm
P Power transmitted in Horse power
vm mean velocity
dN
m/s
60
C v velocity factor (C v values are the same as
for spur gears)
3 vm
3
, for vm 10 m/s, commercially cut gears
Spur Gears & Parallel Axis Helical Gears
6 vm
6
2.127
, for vm 5 to 20 m/s, carefully cut gears
5.5 vm
5.5
, for vm 20 m/s, precision gears
1 vm
1 0.25 vm
, for non-metallic gears.
2. Buckingham’s equation for dynamic load
Buckingham’s equation, used for accurate estimation
of dynamic load, is given by
Dynamic load
0.164 V cb cos3 F cos
m
t
F d F t
3
cb c o s F t ...(6.15)
0.164 V m 1.485
where
F t Tangential load neglecting service factor
P 75
vm
vm Pitch line velocity (or) mean velocity m/sec.
b Face width
c Deformation or dynamic factor in kg f/cm
Helix angle
2.19 WEAR STRENGTH OF HELICAL GEARS
(WEAR TOOTH LOAD)
The wear strength equation of the spur gear is
modified to suit helical gears. Thus the modified wear
strength equation for helical gears is given by
2.128
Design of Transmission Systems
Wear load, F w
where
d1 b Q k
c o s2
(6.16)
d1 Pitch circle diameter of pinion (use pinion
diameter irrespective of whether pinion or gear is
designed)
b Face width,
Q Ratio factor,
2Z2
2i
, for external gears
i 1 Z1 Z2
2Z2
2i
, for internal gears
i 1 Z2 Z1
where i velocity ratio
Z2
Z1
k Load stress factor (also known as material
combination factor), in kg f/cm 2
[ ]2 sin 1
1
c
n
E
14
E
p
g
where
[c] Surface endurance limit in kg f/cm 2
n Normal pressure angle, and
E p and Eg Young’s modulus of pinion and gear
respectively.
Helix angle.
Spur Gears & Parallel Axis Helical Gears
2.129
Note: In the design of helical gears, the normal module
m n should be selected from standards. For the
recommended series of modules, From PSG Data book
pg:8.2; table: 1.
2.20 PRESSURE ANGLE IN THE NORMAL AND
TRANSVERSE PLANE
2.20.1 Pressure angle
Pressure Angle is the
angle formed by the line of
action with common tangent
to the pitch circles of
mating gears.
Pitch p oint
For Involute system of
gears, the pressure angle is
constant and it may be
1
(or) 20
14
2
14
Pre ssu re
An gle
Velocity o f
Pitch P oint
Axis o f
Tra nsm ission
Co mm on
Tan ge nt
Fig: 2.17(a)
1
or 20
2
2.20.2 Transverse Pressure Angle t
The pressure angle measured in transverse plane is
known as transverse pressure angle t
2.20.3 Normal Pressure Angle n
The pressure angle measured in the normal plane is
known as Normal pressure angle n
where
tan n
tan t
Helix angle
2.130
Design of Transmission Systems
Pn
n
t
Pt
Fig:2.17(b).Helical gear nom enclature
Formative or Equivalent Number of teeth for Helical
gears
The formative or equivalent number of teeth for a
helical gear may be defined as the number of teeth that
can be generated on the surface of a cylinder having a
radius of curvature at a point at the tip of the minor axis
of an ellipse obtained by taking a section of the gear in
the normal plane. Mathematically, formative or equivalent
number of teeth on a helical gear.
Zv
Z
cos 3
Spur Gears & Parallel Axis Helical Gears
2.131
Helix angle
Z Actual number of teeth on a helical gear.
It is also called as virtual number of teeth.
2.21 FORCE ANALYSIS OF HELICAL GEARS
In the case of spur gears, the normal force acting on
the plane of rotation of gears and inclined at an angle
to the common tangent, to the pitch circle diameters of
mating gears, at the point of contact, whereas for helical
gears, the force will be inclined to the plane of rotation by
an angle , known as helix angle, and to the tangent by
an angle , the pressure Angle.
Hence the Resultant normal force F n acting on the
helical gear tooth can be derived into three components
such as tangential force F t, Radial component of force
F r and axial component of force F a .
Derivations for F t, F r and F a
Fn
Resultant (normal) force acting on the tooth.
Ft
Tangential (or) Transmitted force
Fr
Radial component of force
Fa
Axial component of force
Pressure angle
Helix angle
Normal pressure angle
t
Transverse pressure angle
2.132
Design of Transmission Systems
From the Fig. 2.18 (A)
A
E
Fn
D
B
C
Ft
H
cen tre lines
o f teeth
F
Fr
Fa
G
Pitch C ylinder
n h ere
(A)
A
B
F n cos a
Fn
Fr
Fa
n
B
G
Ft
C
(B)
Ft
(C )
Fig:2.18.
A G Normal force acting on the tooth F
A D Axial component of force F a
AE
Tangential component of force F t
AB
Radial component of force F r
From triangle ABG
sin
Opposite side
Hypotenuse
G
Spur Gears & Parallel Axis Helical Gears
2.133
AB
sin
AG
AB F r
AG F n
BG F t
AB AG sin Fr Fn sin
cos
(1)
Adj
Hyp
BG
cos
AG
BG AG cos Ft F n cos
From Triangle BCG
BC
sin
BG
(2)
. .
. BG Fn c o s
BC BG sin F a F n cos sin
CG
cos
BG
(3)
. .
. AD BC F a
. .
. CG AE F t
CG BG cos F t Fn cos c o s
The radial and axial components can
expressed in terms of tangential components
Divide the Equation (1) by equation (4)
(4)
also
be
2.134
Design of Transmission Systems
1 4
Fr
Ft
Fn sin
F n cos cos
Fr
sin 1
F t c o s cos
tan
Fr Ft
cos
Divide the Equation (3) by Equation (4)
3 4
Fa
Ft
Fa
Ft
Fa
Ft
F t sin
F n cos sin
F n c o s cos
sin
cos
Fa F t tan
. .
sin
. tan
cos
The tangential force can be derived from the torque
Mt Torque Tangential Force Radial Distance
Mt F t r
Ft
Ft
Mt
r
2Mt
d
d
r 2
Spur Gears & Parallel Axis Helical Gears
Power
P
Mt
where
2.135
2 N M t
60
60 P
2 N
P Power; N Speed in rpm
d Pitch circle diameter.
2.22 DESIGN OF STRAIGHT TOOTH HELICAL AND
DOUBLE HELICAL GEAR BASED ON STRENGTH AND
WEAR CONSIDERATIONS
The design of helical gear is almost similar to spur
gear drive design with slight modification in Lewis and
Buckingham Equations due to presence of Helix angle
in Helical gear.
. .
( . Helix angle)
Step 1
Similar to spur gear Design
Step 2, Step 3 and Step 4
Similar to spur gear Design
Step 5
Calculation of strength of gear tooth F s
F s [ b] b y v Pn
Pn mn
m n normal pitch
yv 0.124
0.154
0.684
for 14 12 Involute
Zv
0.912
for 20 Involute
Zv
2.136
Design of Transmission Systems
0.175
0.95
for 20 Involute stub teeth
Zv
From PSG Data book pg: 8.50 and 8.51
b 10 m n
[b] is the Design bending stress in kg f/cm2. Choose
the [b] value from Data book pg: 8.5 Table: 7.
Step 6
Calculation of Normal module m n
For Safe Design F s F d
By Equating this two equations, determine the value
of normal module.
[Choose the nearest standard normal module value
from PSG Data book pg: 8.2 Table: 1]
Step 7
Calculate the value of face width (b)
b 10 m n
Step 8
Calculate the pitch circle Diameter d1
d1
mn
cos
Z1
Helix Angle
Step 9
Calculation of pitch line velocity
Spur Gears & Parallel Axis Helical Gears
v
d1 N 1
v for m/sec
60 1000
V for m/min
2.137
N 1 rpm
d 1 mm
Step 10
Recalculate the stength of gear tooth F s
F s [b] b yv m n
Substitute m n which is calculated in previous step 5.
Step 11
Calculation of Buckingham’s Dynamic load F d
0.164 V cb cos 3 F c o s
t
m
F d F t
3
cb cos F t
0.164 V m 1.485
C, b and V m are similar to spur gear Design. The
above Equation F d is called modified Buckingham’s
Dynamic load for Helical gears.
Step 12
Check for Beam strength
For safe Design F s Fd
If F s F d, then the Design is not safe, the value of
m should be increased to increase the strength of gear
tooth.
2.138
Design of Transmission Systems
Step 13
Calculation wear load F w :
Fw
d 1 Q kb
cos 2
1
1
[2c ] sin n
E1 E2
; k
1.4
n - normal pressure Angle
c, E 1 and E 2 are similar to spur gear design.
Step 14
Checking for wear strength
For safe Design F w Fd
If F w F d, then the Design is not safe. The value of
k is increased and then Recalculate the value of F w again.
k is the load stress factor.
Step 15
Calculate the Basic Dimensions of Helical gear
From PSG Data book PN 8.22; Table: 26
Spur Gears & Parallel Axis Helical Gears
2.139
Basic Dimensions of Externally Meshing Standard
Cylindrical Gears Suffix 1 for Pinion and 2 for
Wheel
Nomenclature
Notation
Units
Module
m
mm
Normal module
mn
mm
Transverse
mt
mm
module
Centre distance
Height factor
a
f0
mm
Helical and
Herringbone Gears
mn
m1
a
2a cos
Z1 Z2
mn
; mt
cos
2a
Z1 Z2
ma Z1 Z2
2
c o s
fo 1 (in special cases
fo 0.8, stub teeth)
Bottom clearance
c
mm
c 0.25 mn
(For stub teeth,
c 0.3 mn
Tooth depth
h
mm
h 2.25 mn
(For stub teeth,
h 1.9 mn
Pitch diameter
d
mm
or Reference
diameter
Tip diameter
dc
mm
d1
m
Z ;
cos 1
d2
cos
mn
Z2
Z1
2f0 mn
da1
cos
Z2
2f0 mn
da2
cos
2.140
Design of Transmission Systems
Nomenclature
Helical and
Notation
Units
Root diameter
df
mm
Z1
2f0 mn 2c
df1
cos
Z2
2f0 mn 2c
df2
cos
Helix angle
deg.
For helical, 8 to 25
Herringbone Gears
For herringbone, 8
to 25
cos
Number of teeth
Z
Virtual number
Zv
Z1
2a
2a cos
; Z2 iZ1
mn i 1
Zv1
of teeth
mn Z1 Z2
Z1
3
cos
Step 16
Draw the neat sketch of Helical gear
H e lix
Too th
H e lix a ng le
A xis
Fig: 2.17
; Zv2
Z3
cos3
Spur Gears & Parallel Axis Helical Gears
2.141
Problem 2.18: Design a helical gear drive to transmit a
power of 15 kW at 1400 rpm to the following specifications
speed reduction is 3, pressure angle is 20, Helix angle is
15, The material of both gears is C45 steel, Allowable static
stress
is
180 N/mm2
Young’s
modulus
of
the
material
2 105 N/mm2.
Step 1
Given data
power P 15 kW 15 10 3 W
Pinion speed N 1 1400 rpm
Speed reduction (i) 3
Pressure angle 20
Helix angle 15
Material for pinion C45 steel
Material for gear
Static stress
C45 steel
[b] 180 N/mm 2
Young’s modulus E 1 E 2 2 10 5 N/mm 2
Step 2
Selection of material
Pinion – C45 steel
Gear – C45 steel
Both pinion and gear are made up of same material
(C45 steel). Pinion is weaker, therefore design for pinion.
2.142
Design of Transmission Systems
Step 3
Calculation of tangential load F t
F t HP
power
P 15 kW
75
vm
15 10 3
H.P
750
20 H.P
vm
d1 N 1
60 1000
3.14 d 1 1400
60 1000
3.14 20.705 m n 1400
60 1000
vm 1.517 m n m/s
Ft
20 75
988.7936
kg f
mn
1.517 m n
Assume Z 1 20
d1
mn Z1
cos
20 m n
cos 15
d1 20.705 mn
where
m n normal module.
Spur Gears & Parallel Axis Helical Gears
2.143
Step 4
Calculation of Dynamic load F d
Fd Ft Cv
Cv
3 vm
3
;
Assume vm 10 m/s, commerically cut wheels.
Cv
3 1.517 m n
3
3 1.517 m n
F d 988.7775 mn
kg f
3
Step 5
Calculation of strength of gear tooth F s
F s [b] b yv P cn
b 10 m n
[b] b yv m n
y v 0.154
0.192
For 20 Involute teeth
Zv
(yv, from PSG Data book pg: 8.50)
Zv
Z1
cos 3
20
3
cos 15
22.974 ~
23
2.144
Design of Transmission Systems
y v 0.154
0.912
23
[ b] 180 N/mm2
[ b], convert into kgf/c m2
0.1143
[b] 18 10 2 kgf/c m2
2
F s 18 10 10 m n
. .
. 1N ~
10 kgf
0.1143 m n
F s 6460.236 m 2n
Step 6
Calculation of Normal module m n
For Safe Design, F s F d
3 1.517 m n
6460.236 m 2n 988.755
3
6460.236 m 2n 329.5916 [3 1.1517 m n]
6460.236 m2n 379.590 m n 988.775 6460.236
m 2n 0.05875 m n 0.153055
m 2n 0.05875 m n 0.153055
By solving this Equation, we get
m n 0.4217;
m n 0.3629
(- Not possible)
m n 0.4217 c m
5 mm
mn ~
Spur Gears & Parallel Axis Helical Gears
2.145
Step 7
Calculate the value of face width b
b 10 m n
10 5
50 mm
Step 8
Calculate the pitch circle diameter
d1
mn
cos
Z1
5
20
c o s 15
d 1 103.52 ~
104 mm
Step 9
Calculation of pitch line velocity
vm
d1 N 1
60 1000
3.14 104 1400
60 1000
vm 7.619 m/s
Step 10
Calculate the strength of gear tooth F s
F s [ b] b yv m n
[ b] 18 10 2 kg f/c m2
50
5
18 10 2
0.1143 3.14
10
10
1615.059 kgf
2.146
Design of Transmission Systems
[b] 18 10 2 kg f/cm2
Substitute m n and b in cm.
Step 11
Calculation of Dynamic (Buckingham’s) load F d
Fd Ft FI
0.164 V cb cos 3 F cos
m
t
F t
3
cb cos F t
0.164 Vm 1.485
V m 7.619 60 m/min 477.714 m/m in
b 50 mm 5 cm
15
Choose “c” From the PSG Data book pg: 8.53 table
41 and 42.
For 20 ; Steel and Steel. c 11860 e from table:
41 from table: 42 module 5 mm; (carefully cut wheels)
e 0.025
c 11860 0.025
c 296.5
Ft
988.7936
mn
988.7936
5
197.758 kg f
Spur Gears & Parallel Axis Helical Gears
2.147
3
0.164 477.714 296.5 5 cos 15 197.758
F d 197.758
3
0.164 477.714 1.485 296.5 5 cos 15 197.758
F d 197.759
116600.4643
135.63
197.758 859.66
F d 1057.427 kg f
Step 12
Checking for Beam Strength
For Safe Design F s F d
F s 1615.059 kg f and F d 1057.427 kgf
By comparing both values
F s 1615.059 1057.427 F d
therefore the Design is satisfactory.
Step 13
Calculation of wear load F w
Fw
d 1 bQk
cos 2
d 1 104 mm 10.4 cm
b 50 mm 5 cm
15
Q
23
2i
1.5
i1 31
2.148
Design of Transmission Systems
1
1
[c]2 sin
E2
E
1
k
1.4
E 1 E 2 2 10 5 N/mm 2 2 10 6 kgf/cm 2 given
20
[c] 3000 kgf/c m2
From PSG Data book pg: 8.5 table: 7 for steel
1
1
3000 2 sin 20
6
6
2 10
2 10
k
1.4
k
3.078
1.4
k 2.1987
Fw
10.4 1.5 2.1987 5
cos 15
171.4986
cos 2 15
183.8116 kg f
k Load stress factor
Step 14
Checking for wear strength
For safe Design F w F d
F w 183.8116 kg f and Fd 1057.427 kg f
Spur Gears & Parallel Axis Helical Gears
By
comparing
F w and F d ; F d F w
2.149
therefore
the
Design is not satisfactory. So we have to increase the “k ”
value.
k 2.1987 ; It would be increased to increase the value
of F w .
Assume k 21.987 ;
Assume the k value; The assumed value of k should
increase the wear strength and also the wear strength
F w should be larger value, when compared with Dynamic
load F d
Recalculation of wear load
Fw
d1 Qkb
cos 2
10.4 1.5 21.987 5
cos 2 15
1714.986
0.9330
1838.116 kgf
k 21.987 Assu me
Now, F w F s therefore the Design is satisfactory.
Step 15
Calculate the Basic Dimensions of Helical gear
1. module m n 5 mm (Normal module)
2. Transverse module m t
mn
cos
5
5.176 mm
cos 15
2.150
Design of Transmission Systems
3. Centre Distance a
Z2
mn Z1 Z2
2
cos
20 60
5
207.05 mm
2
c o s 15
i Z 1 20
Z1
Z 2 3 20 60
4. Height factor f0 1
5. Bottom clearance c 2.25 m n
2.25 5
11.25 mm
6. Tooth Depth h 2.25 mm 2.25 5 11.25 mm
7. Pitch Diameters: d1
mn
cos
Z1
5 20
c o s 15
103.5 mm
~
104 mm
d2
mn
cos
Z2
5 60
310.5
c o s 15
~
311 mm
Z1
Z6 mn
8. Tip Diameter dc : d c
1
cos
20
215
cos
15
113.52
~
114 mm
Spur Gears & Parallel Axis Helical Gears
Z2
Z6 m n
dc
2
cos
60
25
c
o
s
15
320.58
~
321 mm
Z1
2f0 m n 2 c
9. Root Diameter df : df
1
cos
20
2 5 2 11.25
15
cos
71.02 mm
~
71 mm
Z2
df
2f0 m n 2c
2
cos
60
2 5 2 11.25
c
o
s
15
278.08
~
278 mm
10. Helix angle 15
11. No: of teeth: Z 1 20 Z 2 60
12. Virtual no: of teeth Z v : Z v
1
Z1
3
cos
22.97
~
23
20
cos 3 15
2.151
2.152
Design of Transmission Systems
Zv
2
Z2
cos 3
60
cos 15
68.92
~
69
Problem 2.19: A pair of helical gears with 30 helix angle is
used to transmit 15 kW at 10,000 rpm. The velocity ratio is
4:1; Both the gears are made of case hardened steel with a
static strength of 100 N/mm2. The gears are 20 stub and the
pinion is to have 24 teeth. The face width is 14 times the
module. Find the module and face width for strength.
(Oct ’2006)
Given Data:
Helix angle 30
P 15 kW 15 10 3 Watts 20.38 HP
(HP = 736 Watts)
i 4 :1
N 10,000 rpm
Both the gears are made of case hardened steel.
Static strength [b] 100 N /mm2 10
1000 kgf/cm 2
[Convert into kgf/cm 2
i.e., N/mm2 10 1 kg f/cm 2]
Spur Gears & Parallel Axis Helical Gears
Pressure angle 20 involute stub.
No. of teeth on pinion 24
Face width b 14 tim es module
b 14 m n
Step 1
F s Beam strength [ b] b yv m n
F s 1000 14 m n 0.1492 mn
6562.15 m 2n k gf ... (1)
Transmitted load F t HP
75
vm
When vm 20 m/sec ,
vm
5.5
(precision wheels)
5.5
Cv
F t 20.38
75
125.66 m n
12.16
mn
yv 0.175
Zv
z
3
cos
yv 0.1492
0.95
Zv
24
c o s3 30
36.95
2.153
2.154
Design of Transmission Systems
vm
Z1 m n N1
100 60
m/sec
m n is in cm
24 m n 10,000
100 60
vm 125.66 m n m/sec
V m 7539.82 m n m/min
Dynamic load
Cv
Fd Ft Cv
125.66 mn
5.5
vm 5.5
5.5
5.5
125.66 mn
12.16 5.5
Fd
5.5
mn
To
2.2115
5.5
125.66 mn
mn
2
find
equate
normal
module
m n,
the
equations (1) and (2)
6562.15 m2n
2.2115
5.5
125.66 m n
mn
2967.28 m3n 5.5
125.66 mn
2967.28 m3n 5.5
125.66 mn
Calculate m n, by using trail and error method.
above
Spur Gears & Parallel Axis Helical Gears
Trail 1
Assume m n 0.5 cm
LHS 371.1175 ; RHS 13.42
LHS RHS
Not satisfactory.
Trail 2
m n 0.3 cm
L HS 80.162 ; RH S 11.639
LHS RHS
Not satisfactory.
Trail 3
m n 0.2
LHS 23.75 and RHS 10.513
LHS RHS
Not satisfactory
Trail 4
m n 0.15 c m
LHS 10.01; RHS 9.84
LHS RHS
Therefore,
m n Normal module
0.15 cm
mn 1.5 mm
2.155
2.156
Design of Transmission Systems
m
mn
cos
1.5
1.732 mm
cos 30
Base width b 14 m 14 1.732
b 24.24 mm
Problem
2.20: A helical cast steel gear with 30 helix angle
has to transmit 45 HP at 1500 rpm; If the gear has 24 teeth,
determine the necessary module, pitch diameter and face width
for 20 full depth teeth. The static stress for cast steel may be
taken as 560 kg cm2. The width of face may be taken as 3
times the normal pitch. What could be the end thrust on the
gear? The tooth factor for 20 full depth involute gear may be
taken as 0.154
0.912
; where TE represents the equivalent
TE
number of teeth.
(Apr. 2009)
Given Data:
Helix angle 30
P 45 HP; N 1 1500 rpm
No.of teeth on pinion Z 1 24 teeth T1
Pressure angle 20 full depth involute.
Static stress [ b] 560 kg cm 2
Face width b 3 normal pitch 3 pn 3 m n
yv 0.154
0.1293
0.912
0.912
0.154
TE
37
TE
T1
3
cos
24
cos 3 30
36.95 37 teeth
Spur Gears & Parallel Axis Helical Gears
2.157
Beam strength FS [ b] b yv pn
[ b] 3 m n yv m n
560 3 m n 0.1293 m n
2143.91 m n2 kg
... (1)
Dynamic Load F d F t C v
F t HP
75
vm
vm
d1 N1
60 100
F t 45
Z1 m n N1
60 100
24 m n 1500
60 100
18.84 m n m sec
75
18.84 m n
179.14
kg
mn
Cv
6 vm
6 18.84 m n
6
(Carefully cut gears)
6
179.14 6 18.84 m n
Dynamic Load F d
mn
6
Fd
29.856
6 18.84 mn
m n
... (2)
To find normal module (mm), Equate the equations
(1) and (2)
2143.91 m 2n
29.856
6 18.84 m n
mn
71.808 m 3n 6 18.84 m n
2.158
Design of Transmission Systems
Calculate m n by trail and error method.
Trail (1): m n 0.5
LHS 17.952
RHS 15.42
Therefore it is not satisfactory
LHS RHS
Trail (2): m n 0.4
LHS 4.595
RHS 13.536
LHS RHS
Therefore it is not satisfactory
The value of m n is in between 0.4 and 0.5
Trail m n 0.45
LHS 14.5411
RHS 14.478
LHS RHS
Select normal module m n 0.45 cm 4.5 mm
From PSG Data book P.No. 8.2 Table (1)
Take standard normal module 5 mm
normal mo d ule m n 5 mm
face width b 3 m n
35
47.12 mm
Pitch diameter d1 mn Z 1 5 24 120 mm
End thrust on the Gear
Axial force or
F a F t tan
End thrust
Spur Gears & Parallel Axis Helical Gears
or F t
179.14
mn
d 120 mm
179.14
0.5
12 cm
358.28 kg
2.159
30 helix angle
Tangential force F t
2M t
d
d
12
Torque on
358.28
mt Ft
pinio n
2
2
2149.68 kg cm
2148.6 kg.cm
Axial force F a 358.28 tan 30
Fa 206.74 kg or End Thrust
Problem 2.22: A pair of helical gears subjected to moderate
shock loading is to transmit 30 kW at 1500 rpm of the pinion.
The speed reduction ratio is 4 and the helix angle is 20. The
service is continuous and the teeth are 20 FD in the normal
plane. For the gear life of 10,000 hours, design the gear drive.
[Nov/Dec 2007]
Step 1
Selection of material
From PSG Data book Pg.No. 1.15,
Select Alloy Steel 40 Ni 2 Cr 1 Mo 28, hardened and
tempered.
Surface hardness 55 RC and core hardness 350 BHN .
and u 1550 N/mm 2
2.160
Design of Transmission Systems
Materials for pinion and gear are assumed to be same
and hence only the pinion is designed.
Step 2
Calculation of design stresses
From PSG Data book Pg.No. 8.18
[b]
1.4 kbl
n k
1
From PSG Data book Pg.No. 8.19, for Alloy steels
1 0.35 u 120
0.35 1550 120
662.5 N /mm 2
Life is 10,000 hrs
N 10,000 60 1500
90 10 7 cycles
kb 0.7 from PSG Data book Pg.No. 8.20
k 1.5
from
PSG
Data
book
Pg.No.
8.19
corresponding to steel normalised, surface hardened steel
normalised, surface hardened.
from
PSG
Data
corresponding to surface hardened.
n 2.5
[ b ]
book
Pg.No.
1.4 0.7 662.5
173.13 N/mm2
2.5 1.5
From PSG Data book Pg.No. 8.16
[c] C R HRC k cl
8.19
Spur Gears & Parallel Axis Helical Gears
2.161
From PSG Data book Pg.No. 8.16, corresponding to
Alloy steels, Hardened and tempered
C R 26.5
HRC 55
From PSG Data book Pg.No. 8.17, corresponding to
surface hardness 350
kcl 0.585
[c] 26.5 55 0.585
852.6 N/mm2
Step 3
Calculation of centre distance
a i 1
2
0.7 E [M t]
[ ]
i
c
3
from PSG Data book
Pg.No. 8.13
From PSG Data book Pg.No. 8.15, design twisting
moment
[M t] M t ko k d k
where
ko 1.25 for moderate shock
k kd 1.3 Assume
and
M t 97420
kW
from PS G Da ta book Pg.No. 8.15
N1
2.162
Design of Transmission Systems
97420
30
1500
1948.4 kg f c m
194.84 Nm
[M t] 1.25 1.3 194.84
316.615 Nm
Assume 0.5 from PSG Data b ook Pg.No. 8.14
E 2.1 10 5 N/mm 2 from PSG Data book Pg.N o. 8.14
a 4 1
2
3
2.1 10 5 316.615 10 3
0.7
852.6
4 0.5
140.96
~
141 mm
Assuming Z 1 20 teeth
Z2 i Z1
4 20 80 teeth
From PSG Data book Pg.No.8.22
mn
2a cos
Z1 Z2
2 141 cos 20
20 80
2.65 mm
Spur Gears & Parallel Axis Helical Gears
2.163
Standard module m n 3 is chosen (from PSG Data
book Pg.No. 8.2)
Now revise ‘a’
But d1
m n Z1
cos
from PSG Data book P g.N o. 8.22
3 20
63.85 mm
cos 20
and
d2
mn Z2
cos
from PSG Data book P g.N o. 8.22
3 80
cos 20
255.4 mm
a
d1 d2
2
from PSG Data book Pg.No. 8.22
63.85 255.4
2
159.63 mm
Step 4
Calculation of b, P a, [Mt]
d1
Pt
Z1
Pa
tan
tan
63.85
20
27.55 mm
tan 20
Design of Transmission Systems
2.164
but b a from PS G D ata book Pg.No . 8.14
0.5 159.63
80 mm
we find b P a
Revise design torque
[M t] k o k kd M t
We know that p b/d1 from PSG Data book Pg.No. 8.15
p
80
1.25
63.85
k (Load concentration factor 1.14 (from PSG Data
book Pg.No. 8.15)
and v pitch line velocity
d1 N 1
60 1000
63.85 1500
5.01 m/s
60 1000
From PSG Data book Pg.No. 8.16, corresponding to
pitch line velocity
kd 1.2 for helical gear, IS quality 8
[M t] 1.25 1.14 1.2 194.84
333.176 Nm
Step 5
Calculation of induced stresses
b
0.7 i 1 [Mt]
ab mn yv
from PSG Data book Pg.No. 8.13 A
Spur Gears & Parallel Axis Helical Gears
2.165
where
yv is obtained for Z eq , from PSG Data book Pg.No. 8.22
but Z eq
Z1
3
cos
20 ~
24
cos 3 20
From PSG Data book Pg.No. 8.18
yv 0.414 for 24 teeth
b
0.7 4 1 333.176 10 3
73.52 N/mm 2
159.63 80 3 0.414
b 73.52 [ b] 173.1 N/mm 2
From PSG Data book, Pg.No. 8.13
c 0.7
i1
a
0.7
4 1
159.63
i1
E [M t]
ib
2.1 10 333.176 10
4 80
41
5
3
724.95 [c] 852.6 N /mm 2
Hence the design is safe
Problem 2.22: A pair of helical gears subjected to heavy
shock loading is to transmit 37.5 kW at 1750 rpm of the
pinion. The speed reduction ratio is 4 and the helix angle is
15. The service is continuous and the teeth are 20 full depth
in the normal plane. Select suitable material and design the
gears. Check for working stresses and sketch the drive.
[May, June 2009]
Refer Problem 2.19
2.166
Design of Transmission Systems
Problem 2.23: Deduce the expressions for forces acting on a
gear tooth of a helical gear with the aid of a schematic
diagram.
[Nov, Dec: 2012]
Refer Article 2.22, Pg.No.2.135
Problem 24: Design a pair of helical gears for the following
data.
Power 7.5 kW
Speed of pinion 1400 rp m
Speed reduction 3
Pressure angle 20
Helix angle 10
Select the materials and heat treatment.
Given Data:
P 7.5 kW 7.5 10 3 Watts ; n 1400 rpm ; i 3 ;
20 ; 10
Note
(If life of the gear drive is not given, then select life
N 10,000 hrs).
Step 1: Selection of material and heat treatment (Refer
PSG databook, Page No. 8.16)
Assume same material for both pinion and wheel.
Select Alloy steel with case hardened heat treatment
(Refer PSG Data book P.No. 1.14) - 40 Cr 1 MO 28 Material, u 70 85 kgf /mm2
Take u 80 kgf /mm2
HRC 55 to 63 and CR 280
Spur Gears & Parallel Axis Helical Gears
2.167
Surface hard ness 350 BHN
Take HRC 60
Core hardness 350 BHN
Step 2: Life in cycles.
Assume life of the gear drive N 10,000 hrs
N 10,000 60 RPM 10,000 60 1400
84 10 7 cycles
Step 3: Equivalent young’s modulus (refer PSG databook
P.No. 8.14) Since the material for the pinion and wheel is
same,
E eq 2.15 10 6 kgf /c m2
Step 4: Calculation of design bending stress [b]
(Refer PSG databook P.No. 8.18)
Design bending stress
1.4 k bl
1
[ b ]
n k
(From PSG Data book P.No.
8.20)
(Consider core hardness )
k bl Life factor for bending
1
(From PSG Data book P.No.
8.19)
1 Endurance limit stress
[b]
1.4 1
4000
2 1.5
1866.66 kgf /cm 2
0.35 u 1200
0.35 8000 1200
4000 kgf /cm 2
Take [b] 1867 kgf /cm 2
(From PSG Data book P.No.
8.19)
n factor of safety
2
2.168
Design of Transmission Systems
(From PSG Data book P.No.
8.19)
k Fillet stress concentration
1.5
Step 5: Calculation of design surface (contact compressive)
stress. (Refer PSG databook, P.No. 8.16)
Design surface (contact compressive) stress
[c] C R HRC k cl
[c] 280 60 0.585
[c] 9828 kg f /cm
2
C R 280
HRC 60
kcl Life factor
(From
PSG
Data book P. No. 8.17)
(Consider surface hardness)
0.585
Step 6: Calculation of Design twisting moment [M t] (Refer
PSG databook, P. No. 8.15)
Design twisting moment
[M t] M t k d k
521.89 1.3
[M t] 678.46 kgf cm
Initially assume
M t 97420
kW
n
97420 7.5
1400
521.89 kg f c m
Step 7: Calculation of approximate centre distance a
(Refer PSG databook, Page No. 8.13)
Spur Gears & Parallel Axis Helical Gears
3
Centre distance a i 1
a 3 1
2.169
2
0.7 E [M t]
[ ]
i
c
3
2
0.7 2.15 106 678.46
3 0.3
9828
assume
b
a
0.3
a 8.07 cm
(Open type gearing)
(Refer PSG Data book P.No. 8.14)
i3
(Centre distance should be rounded to R10 series)
Refer PSG databook, Page No. 7.20
Take, Centre distance a 80 mm
Step 8: Calculation of Z 1 and Z2
Assume, Z 1 No. of teeth on pinion 20
No. of teeth on wheel Z2 i Z2 3 20 60 teeth
Step 9: Calculation of Normal module m n
(refer PSG Data book page No. 8.22)
m n Normal module
mn
2a cos
Z1 Z2
2 80 cos 10
1.9696 mm
20 60
2.170
Design of Transmission Systems
Select recommended value of module, (from PSG Data
book P.No. 8.2)
Select, module m n 2.5 mm
(For safe design, always select m n slightly greater
than required)
Step 10: Recalculate the centre distance a
a
m n Z 1 Z 2
2
cos
2.5 20 60
2
cos 10
a 101.54 mm
Take, a centre distance 100 mm (nearest value)
(from R10 series)
Step 11: Calculation of face width ‘b’
b
0.3
a
b 0.3 a 0.3 100 30 mm
Face width b 30 mm
Step 12: Calculation of pitch line velocity, v in m/sec.
Refer PSG Data book P. No.
8.22
Spur Gears & Parallel Axis Helical Gears
Pitch line velocity
d1 n 1
v
m/sec
60 1000
2.171
d1 pitch circle dia of pinion
d1
3.7216 m/sec
mn
cos
Z1
2.5
20
cos 10
50.77 mm
Selection of Quality of gears:
(Refer PSG Data book page No. 8.3)
Select IS Quality - Medium
Preferred Quality - 8
Step 13: To find the constants k
k Load correctionfactor
1.03 at 0.6
kd Dynamic load fac to r
1.3 (For IS-8 Quality,
and k d.
b
30
0.59
d 1 50.77
0.6
velocity
upto
350 BHN
hardness)
3
m/sec,
surface
Step 14: Recalculation of [M t]
[M t] Mt kd k
521.89 1.03 1.3 698.81 kg fcm
Step 15: Checking of bending stress.
Refer PSG Data book Page No. 8.13
yv form factor
Refer PSG Data book
P.No. 8.18
2.172
Design of Transmission Systems
b 0.7
i1
[Mt] [b]
a b mn yv
Zv
Z1
cos3
(Refer Data
book P. No. 8.22)
3 1
0.7
698.81
3
0.25 0.3955
10
20
20.93 21 teeth
cos3 10
659.64 kgf /cm2 [b] 1867 kgf/ cm2
Design is satisfactory based yv 0.3955at Zv 21 teeth
on bending stress
Step 16: Checking of Surface (contact compressive) stress
refer PSG databook, P. No. 8.13
c 0.7
i1
a
0.7
31
10
i1
E [M t] [c]
ib
31
2.15 10 6 698.81
33
7235.45 kg f /cm 2 [c] 9828 kgf/cm 2
Therefore, the design is satisfactory based on surface
(contact compressive) stress.
Problem 2.25: Design a helical gear to transmit 7.5 kW at
1400 rpm; to the following specifications:
Speed reduction is 3;
Pressure angle 20; Helix angle 10;
Design compressive stress 9020 kg/cm2; Design bending stress
2100 kg/cm2.
Modulus
2.05 106 kg/cm2.
of
elasticity
of
materials
(Nov/Dec 2014)
Spur Gears & Parallel Axis Helical Gears
2.173
Given Data:
P 7.5 kW ;
N 1 1400 rpm;
Z2
Speed reduction i 3
Z
1
Pressure angle 20
Helix angle 10
Design surface compressive stress 9020 kg/cm 2
[c] 902 N/mm 2
Design bending stress 2100 kg/cm 2
[b] 210 N/mm 2
E 2.05 10 5 N/mm2
Step 1
Calculation of design twisting moment [M t]
[M t] M t kd k.
M t Nominal twisting m oment transmitted by
the pinion kgf c m
97420
kW
n
97420
7.5
521.89. kg fc m
1400
M t 521.89 .kgfcm
Design of Transmission Systems
2.174
For symmetric scheme,
initially assume k k d 1.3
[M t] 521.89 1.3
678.46 kg fc m
67846 Nmm
Step 2
Calculation of approximate centre distance.
a i 1
0.7
[ ]
c
3
2
E [Mt]
i
i Gear ratio 3; [c] 902 N/mm 2; E 2.05 10 5 N/mm 2
[M t] 67846 Nmm
b
0.3
a
assume, (for open type of Gearing)
a 3 1
0.7
902
3
2
2.05 10 5 67846
3 0.3
a 84.139 mm
Step 3
Assume Z 1 no. of teeth on pinion
20
Gear ratio i
Z2
Z1
Spur Gears & Parallel Axis Helical Gears
3
2.175
Z2
20
Z 2 60 teeth
Step 4
Calculation of normal module (m n. From PSG Data
book page 8.22; table (26)
mn
a 84.138 mm
2a cos
Z1 Z2
10
Z 1 20
2 84.139 cos 10
20 60
Z 2 60
2.07 mm
Represent normal mo dule
standard
m n 3 mm
boo
8.2
table
2
k P.No.
from PSG Data
Step 5
Re-calculate centre distance ‘a’ From PSG Data book
P.No.8.23; table (26)
Centre distance a
mn Z1 Z2
2
cos
20 60
3
2
cos 10
121.85 mm
(rounded to R10 series)
From R10 series, take centre distance a 125 mm
2.176
Design of Transmission Systems
Step 6
Calculation of face width ‘b’
Already is assumed as 0.3
But
b
a
ba
125 0.3 37.5 mm
Face width b 37.5 mm
Step 7
Calculate pitch circle dia. d1 and d 2
Refer PSG Data book P.No. 8.22; table (26)
mn
d1 pitch circle dia
Z1
of p inio n
cos
3
20
cos 10
d1 60.92 mm
mn
d2 pitch circle dia
Z2
of wheel
cos
3
60
cos 10
d2 182.77 mm
Step 8
Calculation of pitch line velocity v
Pitch line velocity v
d1N 1
60
m sec
Spur Gears & Parallel Axis Helical Gears
2.177
60.92 1400
1000 60
4.46 m sec
Step 9
Selection of Quality, preferred Quality from PSG Data
book P.No.8.3; table (2) above 1m/sec; up to 8m/sec,
Preferred Quality- 1S6
Step 10
Calculate p and k; Refer table (14); P.No. 8.15 of
PSG Data book
p
37.5
b
0.61556
d1 60.92
From PSG Data book
p 0.6 : The value of k 1.03
table (14): P.No.8.15 at
Step 11
Read the value of k d :
From PSG Data book Table (15): P.No. 8.16 for
quality IS 8; pitch line velocity. upto 8 m/sec.
kd 1.3
Step 12
Recalculate the design twisting mount [M t]
[M t] M t kd k 521.89 1.3 1.03
698.81 kg f cm 69881 N mm
2.178
Design of Transmission Systems
Step 13
Calculation of b and checking of ab
Refer PSG Data book P.No.8.13; Table 8
b 0.7
i1
[M t]
a b m n yv
i 3; a 125 mm
m n 3 mm; b 36.555 mm
yv form factor From PSG Data book P .No. 8.18
and P.No.822
0.39485
[M t] 69881 N mm
b 0.7
3 1 69881
36.2
125 36.5 3 0.39485
b 36.20 [b] 210 N mm 2 b 36.2 [ b] 210
The design based on beam strength is satisfactory.
Step 14
i1
E [M t]
ib
c 0.7
i1
a
0.7
31
125
31
2.05 10 5 69881
3 36.555
512.035 N mm 2 [c] 902 N mm2
The design based on wear strength is satisfactory.
Spur Gears & Parallel Axis Helical Gears
2.179
Problem 2.26: A pair of helical gears with 30 helix angle is
used to transmit 15 kW. at 10,000 rpm of pinion. The velocity
ratio is 4 : 1. Both the gears are made of case hardened steel
with a static strength of 10 N mm2. The gear is at 20 stub
and the pinion is to have 24 teeth. The face width is 14 times
the module. Find the module and face width for strength.
(May/June 2013)
Given Data:
Helix angle 30; P 15 kW; n N 10,000 rp m; i 4
[b] 100 N mm 2 Z 1 24 teeth b 14 module
Refer PSG Data book P.No. 8.13:
For designing,
m n 1.15 cos
3
[M t]
y v [b] m Z 1
[M t] M t kd k (Refer PSG Data book P.No.8.15)
M t 97420
kW 97420 15
10,000
n
146.13 kg f cm
(Assume k d k 1.3
M t 14613 N mm
Design twisting moment [M t] 14613 1.3
18996.9 N mm
yv form factor
Z v yv
2.180
Design of Transmission Systems
40 0.465
35 0.452
5 _ 0.013
2 ?
Zv
2 0.013
5.2 10 3
5
for 35 0.452
Z1
cos 3
24
cos 3 30
36.95
for 2 5.2 10 3
37
37 0.4572
yv At 37 and X 0
Form factor yv 0.4572
Assume m 10 [From PSG Data book P.No. 8.14
Table (12)]
Z 1 24 teeth given
m n 1.15 cos 30
1.15 cos 30
3
[M t ]
yv [b] m Z1
3
18996.9
0.4572 100 10 24
1.195 mm
take m n 1.195 mm
Module (m)
mn
cos
1.195
1.37 mm
c o s 30
Spur Gears & Parallel Axis Helical Gears
2.181
Take standard module m 1.5 mm
b face width 14 m
14 1.5 21 mm
Problem 2.27: A pair of helical gears subjected to moderate
shock loading is to transmit 37.5 kW at 1750 r.p.m. of the
pinion. The speed reduction ratio is 4.25 and the helix angle
is 15. The service is continuous and the teeth are 20 FD in
the normal plane. Design the gears, assuming a life of 10,000
hours.
[April/May: 2010]
[Similar to the problem: 2.24]
Problem 2.28: A pair of helical gears for a turbine has a
transmission ratio of 10:1. The pinion rotates at 5000 rpm and
made of carbon steel and the gear wheel is made of high grade
cast iron. Power transmitted 90 kW. The gear pair is required
to last for atleast 12000 hrs. Select suitable gear materials.
[May/June: 2012]
[Similar to the problem: 2.24]
Problem 2.29: A pair of helical gears is to transmit 14 kW.
The teeth are 20 sutb and helix angle is 45. Pinion runs at
10,000 rpm and has 80 mm PCD. Wheel has 320 mm PCD.
Both gears are made of cast steel. Design the gear pair and
obtain the basic dimensionals assuming a life of 10000 hours.
[April/May: 2010]
[Similar to the problem: 2.24]
2.182
Design of Transmission Systems
Problem 2.30: Design a pair of helical gears to transmit 10
kW at 1000 rpm of the Pinion. Reduction ratio of 5 is required.
Give details of the drive in a tabular form. Life of gear is
10 103 hrs.
Given Data
P 7.5 kW ; N 1000 rpm ; i 5
Solution
Step 1 Selection of material and heat treatment
Assume same material for both pinion and wheel.
Select Alloy steel with case hardened,
40Cr 1MO 28 material
From PSG Data book Pg.No. 1.14, properties of the
selected material,
u 70 85 kg f/mm 2;
Take u 80 kg f/mm 2
HRC 55 to 63, C R 280
surface hardness 350 BHN
Take HRC 60,
core hardness 350 BHN
Step 2: Life in cycles
life of gear drive N 10,000 hrs
N 10,000 60 RPM 10,000 60 1000
N 60 107 cycles
Step 3: Equivalent Young’s modulus
From PSG Data book, Pg.No. 8.14, since the material
for the pinion and wheel is same.
Spur Gears & Parallel Axis Helical Gears
2.183
E eq 2.15 10 6 kg f/cm 2
Step 4: Calculation of design bending stress [b]
From PSG Data book, Pg.No. 8.18
Design bending stress
[b]
1.4 kbl
n k
1
From PSG Data book, Pg.No. 8.20 consider core
hardness
kbl 1
From PSG Data book, Pg.No. 8.19,
1 Endurance limit stress
0.35 u 1200 0.35 8000 1200
4000 kg f/cm 2
From PSG Data book, Pg.No. 8.19
n F actor of safety 2
k Fillet stress concentration 1.5
[b]
1.4 1
4000 1866.66 kgf/cm2
2 1.5
Step 5: Design surface contact stress
From PSG Data book, Pg.No. 8.16
Design surface (contact compressive) stress
[ c] C R HRC kcl
From PSG Data book, Pg.No. 8.17,
2.184
Design of Transmission Systems
kcl Life factor, consider surface hardness 0.585
[c] 280 60 0.585
[ c] 9828 kgf/cm 2
Step 6: Calculation of Design twisting moment [M t]
From PSG Data book, Pg.No. 8.15,
Design twisting moment
[M t] M t kd k
Initially Assume kd k 1.3
and
M t 97420
kW
10
97420
1000
n
M t 974.2 kgf cm
[M t] 974.2 1.3 1266.46 kgf cm
Step 7: Calculation of approximate centre distance
From PSG Data book, Pg.No. 8.13
a i 1
2
0.7 E [M t]
[ ]
i
c
3
From PSG Data book, Pg.No. 8.14, corresponding to
open type gearing
b
0.3
a
Spur Gears & Parallel Axis Helical Gears
a 5 1
2.185
3
2
6
0.7
2.15 10 1266.46
5 0.3
9828
a 12.57 c m
Centre distance should be rounded to R10 series.
From PSG Data book, Pg.No. 7.20,
Centre distance a 16 cm 160 mm
Step 8: Calculation of Z 1 and Z 2
Assume, Z 1 Number of T eeth on pinion 20 teeth
Number of teeth on wheel
Z 2 i Z 1 5 20 100 teeth
Step 9: Calculation of Normal module m n
From PSG Data book, Pg.No. 8.22
m n Normal module
2a cos
Z 1 Z2
Assuming Helix angle 10
2 160 cos 10
2.626 mm
20 100
From PSG Data book, Pg.No. 8.2, the recommended
value of module
m n 3 mm
2.186
Design of Transmission Systems
Step 10: Recalculate the centre distance
Since
a
m n Z 1 Z 2
20 100
3
182.77 m
2
2
cos
cos 10
Take a centre distance = 200 mm, (nearest value
is R10 series)
Step 11: Calculation of face width ‘b’
Since
b
0.3
a
b 0.3 a 0.3 200
Face width ‘b’ 60 mm
Step 12: Calculation of pitch line velocity, v in m/s
From PSG Data book, Pg.No. 8.22,
d1
mn
cos
Z 1 pitch circle dia of pinion
3
20 60.92 mm
cos 10
Pitch line velocity v
d1 n
60
60.92 10 3
1000
60
v 3.189 m/s
Step 13: Selection of Quality of gears
From PSG Data book, Pg.No: 8.3,
select IS Quality - medium
preferred Quality - 8
Spur Gears & Parallel Axis Helical Gears
2.187
Step 14: To find the constants k and k d
From PSG Data book, Pg.No. 8.15,
p
b
60
0.984
d1 60.92
From PSG Data book, Pg.No. 8.15,
corresponding to p 0.984
k1
From PSG Data book, Pg.No. 8:16, corresponding to
pitch line velocity, up to 8 m/s and IS Quality - 8 and
surface Hardness 350
kd 1.2
Step 15: Recalculate value [M t]
[M t] M t kd k 974.2 1.2 1 1169.04 kgf cm
Step 16: Checking the bending stress
From PSG Data book, Pg.No. 8.22
Virtual Number of Teeth
Zv
Z1
3
cos
20
c o s3 10
20.93 ~
21 teeth
From PSG Data book, Pg.No. 8.18, corresponding to
Z v 21 teeth , X 0
yv 0.3955
From PSG Data book, Pg.No. 8.13 A,
b 0.7
i1
[M t] [b]
amby
2.188
Design of Transmission Systems
0.7
5 1
1169.04
20 0.3 6 0.3955
344.8 kg f/cm 2 [b]
Step 17: Checking for surface stress
from PSG Data book, Pg.No. 8.13
c 0.7
i1
a
0.7
E [M ] [ ]
ib
i1
5 1
20
t
c
2.15 10 1169.04
56
51
6
4708.3 kg f/cm 2 [c]
The design is satisfactory based on bending stress
and surface stress
Problem 2.31: A helical gear with 30 helix angle has to
transmit 35 kW at 1500 rpm, with a speed reduction ratio 2.5.
If the pinion has 24 teeth, determine necessary module, pitch
diameter, and face width for 20 full depth teeth. Assume 15
Ni 2 Cr 1 Mo 15 material for both pinion and wheel. [Assume
Lg 10,000 hrs]
Solution
Step 1
Material selection
Given that material used is
15 Ni 2 Cr 1 Mo 15
From P.S.G Data book, Pg.No. 8.5
Spur Gears & Parallel Axis Helical Gears
2.189
[b] 320 N/mm2, [ c] 950 N/mm 2
L g 10,000 hrs
Step 2
Calculation of centre distance from P.S.G Data book,
Pg.No. 8.13
a i 1
3
2
0.7 E [M t]
[ ]
i
c
i 2.5 given; [c] 950 N/mm2
E 2.15 105 N/mm2 assume for s te el
From P.S.G Data book, Pg.No. 8.14
b
0.3 (assume)
a
But P.S.G Data book, from Pg.No. 8.15
[M t] k k d M t
But from P.S.G Data book, Pg.No. 8.15
M t 97420
97420
kW
N1
35
1500
2273 kg f cm
Initially assume k k d 1.3
[M t] 1.3 2273
2.190
Design of Transmission Systems
2954.9 kg f cm
[M t] 295490 Nmm
a 2.5 1
3
2
5
0.7
2.15 10 295490
2.5 0.3
950
125.39
~
126 mm
Step 3
Calculation of module
Z1 24 given
Z 2 i Z 1 2.5 24 60 teeth
From P.S.G Data book, Pg.No. 8.22
mn
2a cos
Z1 Z2
2 126 cos 30
24 60
m n 2.59
The standard module m n 3 is chosen
Now revise ‘a’
d1
mn Z1
cos
3 24
83.13 mm
cos 30
d2 i d1 2.5 88.13 207.82 mm
Spur Gears & Parallel Axis Helical Gears
a
d1 d2
2
a
2.191
88.13 207.82
2
148 mm
147.975 mm ~
Step 4
Calculation of face width ‘b’
ba
0.3 147.975
44.39 mm ~
45 mm
ADDITIONAL PROBLEMS
April 1998
It is desired to determine the proportions of a spur
gear drive to transmit 8 kW from a shaft rotating at 1200
rpm to a low speed shaft, with a reduction of 3:1. Assume
that the teeth are 20 full depth involute, with 24 teeth of
the pinion. The pinion is made to be of 40 C 8 normalized
and gear of 30 C 8 normalized steel. Assume that the
starting torque is 130 percent of the rated torque.
April 1998
A compressor running at 360 rpm is driven by 150
kW, 1440 rpm motor through a pair of 20 full depth helical
gears having helix angle of 25. The center distance is
approximately 400 mm. The motor pinion is to be forged
steel and the driven gear is to be cast steel. Assume
medium shock conditions. Design the gear pair.
2.192
Design of Transmission Systems
October 2001
A pair of helical gears is to transmit 10 kW at 1200
rpm with a speed reduction of 4. Design the gear drive
assuming suitable material.
October 2000
Design a pair of spur gears to transmit 10 kW 1500
rpm with a gear ratio of 3. Assume same material for both
wheels.
Check
for
plastic
deformation
assuming
instantaneous torque is 50% higher than mean torque.
October 1998
Design a set of helical gears to transmit 80 HP to
effect a speed reduction of 2.5:1 with pinion connected to
motor rotating at 1440 rpm. The teeth of gears are of full
depth 20 pressure angle to the normal plane. Peripheral
pitch line velocity may be limited to 600 meter per minute.
Assume gear and pinion are to be made of forged steel
having ultimate tensile strength of 6000 kg/cm 2. The pinion
is properly heat treated to obtain hardness of 240 BHN.
Assume service factor of 2 and number of teeth in pinion
16 .
Chapter – 3
DESIGN OF BEVEL, WORM AND
CROSS HELICAL GEARS
Straight bevel gear: Tooth terminology, tooth forces and
stresses, equivalent number of teeth. Estimating the dimensions of
pair of straight bevel gears. Worm Gear: Merits and
demeritsterminology. Thermal capacity, materials-forces and
stresses, efficiency, estimating the size of the worm gear pair. Cross
helical: Terminology-helix angles-Estimating the size of the pair of
cross helical gears.
3.1 INTRODUCTION
Bevel gears are used to transmit power between two
intersecting shafts. There are two types of bevel gears Straight and spiral. Incase of straigth bevel gears, the teeth
are straight, which converge into a common apex. Incase
of spiral bevel gears, the teeth are curved. Straight bevel
gears are easy to design and manufacture. These gears
produce noise at high speed conditions.
Spiral bevel gears are difficult to design and
manufacture. These gears facilitate a quiet operations, even
at high speeds.
In general, the angle between the axes of intersecting
shafts is 90. i.e., the axes of the shafts are at right angles.
3.2 TYPES OF BEVEL GEARS
Bevel gears are used to connect two intersecting
shafts.
Design of Transmission Systems
dum
d en
De
Add
end
um
3.2
b
R
PC D
( ,n sid e)
R oot
D iam eter
O
PC D
(O u ts ide)
R = C on e D is ta nce
b =Fa ce W idth
Se m i C o ne A ng le
( o r P itc h Angle)
a Ad dend um Angle
f D edend um A ng le
Tip
D iam eter
a
f
Fig. 3.1. P arameter of bevel gear
1. Straight bevel gears 1. Axes intersect
2. Zerol bevel gears
2. Axes intersect
3. Sprial bevel gears
3. Axes intersect and teeth are
curved and oblique (less
noisy)
4. Face gears
4. Spur gear pinion meshes with
a ring gear having conjugate
teeth cut into the face of it.
5. Skew bevel gears
5. Axes are non-parallel and
non-intersecting. Teeth are
parallel
Design of Bevel,Worm and Cross Helical Gears 3.3
o
< 90 (A cu te)
o
= 9 0
(b)
(a)
(R igh t)
z2
o
> 9 0 (O b tu se )
(c)
6. Hypoid gears
Fig. 3.2.
z1
M itre B evel
o
G ea rs
= 90
(d) z 1 = z 2 = no o f te e th in ea ch g e ar.
6. Axes
are
non-parallel,
non-intersecting. Teeth are
curved. Used in
Automobile differential units
3.4
Design of Transmission Systems
3.3 BEVEL GEAR NOMENCLATURE
= 90
o
M
f
a
a
d1
1
f1
a1 a2
2
R
f2
b
mt
mt
a
mm
d2
s = ab
b
ha
hf
d a2
Fig. 3.3. N o m e n clature of s tan d ard b evel G e ars
1. Pitch cone: It is an imaginary cone that rolls without
slipping on a pitch surface of another gear.
2. Cone Centre: It is the point where the axes of two
mating gears intersect each other. It may be also defined
as the apex of the pitch cone.
3. Pitch Angle: It is the angle made by the pitch line of
a gear with the gear axes. It is denoted by
4. Cone Distance: It is the length of the pitch cone
element. It is also known as pitch cone radius and is
denoted by R
R
d2/2
Pitch Radius d 1/2
sin
sin 1 sin 2
Design of Bevel,Worm and Cross Helical Gears 3.5
R
1
d 21 d 22
2
For Right angle gears
R
1
Z 21
Z 22
m
2 t
where
d 1 & d2
Pitch circle diameter of pinion and
gear.
Z1 & Z2
Number of teeth of pinion and gear.
1 & 2
Pitch angle of pinion and gear.
mt
Transverse module
5. Addendum Angle a: It is the angle subtended by
the addendum of the tooth at the cone centre.
ha
addendum
a tan 1
tan 1
R
cone distan ce
6. Dedendum Angle f: It is the angle substended by
the dedendum of the tooth at the cone centre.
hf
dedendum
tan 1
f tan 1
R
cone distance
7. Tip Angle (Face Angle): It is the angle substended
by the root of the tooth at the cone centre. It is denoted
by a
a Pitc h Angle Addendum Angle
a
3.6
Design of Transmission Systems
8. Root Angle: It is the angle subtended by the root of
the tooth at the cone centre. It is denoted by f
f Pitch Angle Dedendum Angle
f
9. Back Cone: It is an imaginary cone, perpendicular to
the pitch cone at the end of the tooth. It is also known as
normal cone.
10. Back cone distance: It is the length of the back
cone. It is also known as back cone radius.
11. Backing: It is the distance of the pitch point from
the back of the boss, parallel to the axis of the gear.
12. Mounting height: It is the distance of the back of
the boss from the cone centre.
13. Pitch diameter: It is the diameter of the largest
pitch circle.
14. Outside (or) addendum cone diameter: It is the
maximum diameter of the teeth of the gear. It is equal to
the diameter of the blank from which the gear can be cut.
Outside Diameter Pitch diameter 2 h ac o s
15. Inside (or) dedendum cone diameter: Inside
diameter Pitch diameter 2hf cos
Where
ha Addendum
hf Dedendum
Design of Bevel,Worm and Cross Helical Gears 3.7
3.4 FORMATIVE (OR) EQUIVALENT (OR) VIRTUAL
NUMBER OF TEETH FOR BEVEL GEARS
Bevel gears are replaced by equivalent spur gears, to
simplify the design calculation and analysis. An Imaginary
spur gear considered in a plane perpendicular to the tooth
at the largest end, is called as virtual spur gear. The pitch
cone radius ‘R’ of the bevel gear is equal to the pitch circle
radius of the virtual spur gear.
The number of teeth on this imaginary spur gear is
called virtual number of teeth.
Mathematically,
For pinion
Zv
Z
cos
Where
Z1 & Z2
Z v1
Z1
cos 1
For gear
Z v2
Z2
cos 2
are the actual number of teeth on the
pinion and gear of the bevel gear
respectively.
Z v1 & Z v2 are the virtual number of teeth on the
pinion and gear of the bevel gear respectively.
3.5 TOOTH STRESS (OR) STRENGTH OF BEVEL GEARS
Lewis Equation
The strength of a bevel gears tooth is obtained in the
similar way as that of the spur gear. The modified form of
the Lewis equation for the tangential tooth load is given
here.
Rb
F s [b] b m yv
R
3.8
Design of Transmission Systems
[b]
–
Allowable Static Stress
b
–
Face width
m
–
Module
yv
–
Lewis Factor (or) tooth form factor for the
equivalent number of teeth.
R
–
Cone distance
R
d21
2
d22
2
d1
–
Pitch Circle Diameter of pinion
d2
–
Pitch Circle Diameter of gear
Rb
R is a bevel factor.
3.6 DYNAMIC LOAD FOR BEVEL GEARS
The dynamic load for bevel gears may be obtained in
the similar way as that of spur gear.
Buckingham’s Dynamic load
From PSG Data book Pg No. 8.50
Fd F t F I
0.164 V m cb F t
Ft
cb F t
0.164Vm 1.485
All the notations are similar to spur gear deign.
3.7 WEAR STRENGTH FOR BEVEL GEARS
The maximum (or) limiting load of wear strength of
bevel gear is given here.
Design of Bevel,Worm and Cross Helical Gears 3.9
Fw
d1 b Q v kw
cos
Qv
–
Ratio factor based on the virtual number of
teeth.
–
Pitch Angle
b
–
Face width
kw
–
Load stress factor
Qv
2 Z v2
Z v1 Z v2
Note: According to Buckingham’s the wear load should be
greater than dynamic load for safe design.
3.8 FORCE ACTING ON THE BEVEL GEAR
The normal force F N on the tooth is perpendicular
to the tooth profile and thus makes an angle equal to the
pressure Angle to the pitch circle. Thus the normal force
can be resolved into two components.
(i) Tangential component F T
(ii) Radial component F R
The bearing reactions are produced by tangential
component (or) tangential tooth load.
The end thrust in the shaft is produced by the radial
component.
cos
FT
FN
FT FN c o s
3.10
Design of Transmission Systems
FN
FR
FR
FT
b
R
F R V= F R
F RH= F A
G ea r S ha ft
Rm
o
=p re ssu re an gle = 2 0
P itch co ne a ng le fo r p in io n
b =fac e w id th
R = con e distan ce
O ver H an g
D ista n ce
Fig. 3.4 .
sin
Fo rc es a ctin g o n
B ev el G ea r
FR
FN
F R F N sin
tan
FR
FT
F R F T tan
These Forces are considered to act at the mean radius
R m. From the Fig. 3.4.
d1
R m R b/2 sin 1 ; sin 1
2R
Design of Bevel,Worm and Cross Helical Gears 3.11
R m R b/2
d1
FR
2R
The radial force F R acting at the
V
Fig. 3.5
FR
FR
H
mean radius Rm may be further resolved
into two components.
F RH and F RV in the axial and radial directions
respectively are shown in Fig. 3.5.
The axial force acting on the pinion shaft
sin 1
FR
H
FR
. .
. FR F T tan
F R FR sin 1
H
F T tan sin 1
The radial force acting on the pinion shaft
cos 1
FR
V
FR
F R FR c o s 1
V
. .
( . FR FT tan
F T tan cos 1
It shows that the axial force on the pinion shaft is
equal to the radial force on the gear shaft but in opposite
directions, likewise, the radial force on the pinion shaft is
equal to the axial force on the gear shaft, but in opposite
directions.
3.12
Design of Transmission Systems
3.9 BASIC DIMENSIONS OF BEVEL GEAR PAIR
Nomenclature
Transverse
Formulae for straight and
spiral bevel gears
Symbol
mt
module
y 0.5
mm
mt m
m y
Mean Module
mm
Normal Module
mn
mn mt cos
Cone Distance
R
R 0.5 mt Zi
i2
1
b sin
Z
Z21 Z22
0.5mt
Reference
2 sin 1
mt Z2
2 sin 2
d
d1 mt Z1 ; d2 mt Z2.
da
da1 mt Z1 2 cos 1 ;
Diameter
Tip Diameter
mt Z1
da2 mt Z1 2 cos 2
Face Width
b
b ~ 0.3 R or 10 mt whichever is
smaller
For spiral bevel, see chart, p.8.40
Number of Teeth
Z
Number of teeth
Zc w
on crown wheel
Minimum number
of teeth on
pinion to avoid
ZU
Z1, Z2 ; Z1 iZ2
Zcw
ZU
2R
mt
2X cos
sin2
; X 1,
for uncorrected gears)
undercutting
Pressure Angle
20 usually
Mean spiral angle
m
m usually 30 to 35 ; 35
preferred. 0 for ZEROL BEVEL
y
y
R
b
Design of Bevel,Worm and Cross Helical Gears 3.13
Nomenclature
Formulae for straight and
Symbol
spiral bevel gears
Reference angle
tan i ; 1 90 2
Addendeum angle
a
Dedendum angle
f
Height factor
f0
f0 1 ; standards
Clearance
C
C 0.2
Tip angle
a
a a
Root angle
f
f f
tan a1 tan a2
tan f1 tan f2
m t f0
R
mt f0 c
R
Straight Bevel
Tooth height
h
h ha hf
Spiral Bevel
h 1.88 mt
for 20
Working depth
hw
hw 2mt
hw 1.7 mt
for 20
Addendum
ha
ha mt
ha1 hw ha2
ha2 mt Ca
Select Ca from
Table 31a.
dedendum
hf
hf 1.1236 mt
(Reinecker)
1.67mt (AEG)
hf h ha1
1
1.88 mt (Gleason) hf h ha2
2
Circular tooth
thickness
S
S1 mt S2
S1 mt S2
3.14
Design of Transmission Systems
Straight Bevel
S2
Virtual number
of teeth
Zv
mt
2
Spiral Bevel
S2
mt
2
ha1 ha2 tan
1.22 ha1 ha2
Kmt
tan Kamt
Select K from
table 31 b
Select K2 from
Zv
Z
cos
chart, p.8.42
Zv
Z
cos cos2 m
Zv min 18 for 20 and f0 1
1
Face contact ratio
Corrected gear
t
f
bRtan m
mt R 0.5b
usually S
correction is
applied. To avoid
undercutting the
correction factor
Xou 1
2f0 cos1
Z1 sin2
Nomenclature of Standard Bevel Gears
From PSG Data book P.No. 8.38 Table (31)
R Cone radius
b Face width
90 (Angle between two shafts)
Design of Bevel,Worm and Cross Helical Gears 3.15
Angles
Pinion
Wheel
a addendum angle
a addendum angle
f dedendum angle
f dedendum angle
a tip angle
a tip angle
f root angle
f root angle
1 semi-cone angle of
2 semi-cone angle of
1
1
1
2
2
2
1
2
pinion (1)
wheel (2)
From PSG Data book P.No. 8.38 Table (31)
1. Transverse module m t m m
b sin 1
Z1
where
m m mean module or average m odule
b face width
1 semi cone angle for pin ion
Z 1 no. of teeth on pinion
1 2 90
But, tan 2 i
Z2
Z1
Calculate 2, then
1 90 2
where 2 semi cone angle of wheel.
3.16
Design of Transmission Systems
2. Normal module mn m t cos m (only for spiral
bevel gear)
where m mean spiral angle
30 to 35 Gen eral
3. Cone distance (R)
Z21
Z22
R 0.5 m t Z 1
i2 1 0.5 m t
mt Z1
2 sin 1
4. Pitch
m t Z2
2 sin 2
circle
diameter
(outside)
of
pinion
d1 m t Z 1
Pitch circle diameter (outside) of gear or wheel
d2 m t Z2
5. Tip dia. of pinion d a m tZ1 2 cos 1
1
6. Tip dia. of wheel or gear d a m tZ 2 2 cos 2
2
7. Face width b 0.3R or 10 m t. Consider whichever
is smaller.
y
R
b
From PSG Data book table (13); P.No. 8.15,
for i 1 to 4 y 3
for i 4 to 6 y 4
Design of Bevel,Worm and Cross Helical Gears 3.17
In general, take
y 3
3
R
b
b
R
3
8. Addendum angle a
tan a tan a
1
m t fo
R
2
where fo height factor
9. Dedendum angle f
tan f tan f
m tfo c
R
2
1
Where c clearance
10. Virtual number of teeth Zv
Zv
Zv
2
Z
;
cos
Zv
1
Z1
cos 1
Z2
cos 2
11. Tip angle a 1 a (pinion) a 2 a (wheel)
1
1
2
2
12. Root angle f 1 f pinion) f 2 f (wheel)
1
1
2
2
3.18
Design of Transmission Systems
3.11 DESIGN OF STRAIGHT BEVEL GEARS USING
LEWIS AND BUCKINGHAM EQUATIONS
Step 1:
For a given problem, note down the given parameters
like, power, speed, gear ratio (i) etc...
Step 2: Selection of Material
To determine the strength of gear and pinion, use
procedure similar to the spur gear design.
Step 3: Calculation of Pitch Angles 1 & 2
1 2 90 ; tan 2 i
2 tan 1 i
Step 4: Calculation of virtual number of teeth
Z v1
Z2
Z1
Z1
cos 1
; Z v2
Z2
cos 2
i if Z 1 is n ot given, Assume Z 1 20
Step 5: Calculation of tangential load F t
Ft
HP 75
kg f
vm
10 Newton]
[1 kgf of ~
vm Pitch line velocity m/sec.
Ft
HP 75
10 N
vm
The above step is similar to spur gear.
Design of Bevel,Worm and Cross Helical Gears 3.19
Step 6: Calculation of Dynamic Load F d
Fd Cv Nsf km Ft
From the data book Pg.8.52
N sf survival factor
[N sf 1 to 2]
[C v
vm
3.5
] [when vm 5 m /s]
3.5
km load distribution factor.
Choose k m value From PSG pg data book Pg.8.52
Step 7: Calculation of strength of gear tooth
Fs
[ b] b yv 1
b
R
Pd
From PSG data book Pg no.8.52
Diametrical Pitch P d
Pd
Pc
Pc
Pc Circular Pitch
d
Z
b Face width in cm
R Cone Distance in cm
yv Lewis form factor based on virtual number of
teeth.
3.20
Design of Transmission Systems
b 0.3 R (or)
10
Pd
m t transverse module in cm
From PSG Data book Pg 8.52
Step 8: Calculation of Transverse Module m t
We know that, For satisfactory design
F s Fd
By equating this two factors, we can calculate the
module m t
Step 9: Calculation of Face Width (b)
b 0.3 R (or)
10
Pd
1
Z1
P d1 d
1
Step 10: Calculation of Pitch Circle Diameter
d 1
d1 m t Z1
Step 11: Calculation of Pitch Line Velocity
V
d 1N 1
60 1000
m/s
d1 in mm
N1 rpm
Step 12: Recalculation of Strength of gear tooth
(Fs
b
[ b ] b y v 1
R
Fs
Pd
b
Fs [ b] b yt 1
R
Design of Bevel,Worm and Cross Helical Gears 3.21
Step 13: Calculation of Buckingham’s Dynamic Load
Fd
0.164 V m cb F t
Fd F t
cb Ft
0.164 Vm 1.485
The calculation of dynamic load is similar to spur
gear, where Vm should be taken for largest pitch circle.
Step 14: Checking for beam strength
For safe design Fs Fd
This step is similar to spur gear
Step 15: Calculation of Wear Load Fw
Fw
d ib Q v kw
cos 1
Qv Ratio factor based on virtual number of teeth.
kw Load stress factor
1
1
[c] sin
E 1 E2
kw
1.4
1
. .
. If is not given, assume 14
2
Step 16: Checking of Wear Strength
For safe design F w F d
Step 17: Calculate the Basic Dimensions of Straight
Bevel Gear
From PSG data book pg 8.39
3.22
Design of Transmission Systems
Step 18: Draw the neat sketch of straight bevel gear.
DESIGN OF BEVEL GEARS (Simple steps)
(Refer PSG Data book Page Nos. 8.50 to 8.53)
By using Lewis and Buckingham’s equation.
Step 1
b
[ b] b Yv 1
R
F s Beam strength
Pd
But P d diametrical pitch
... (1)
1
P c m t mt
P c m t
where m t Transeverese module in cm.
Y v yv
where
yv
virtual
form factor based on
virtual no. of teeth.
Z v
yv 0.154
0.912
for 20 involute
Zv
0.124
0.684
for 1412 involute
Zv
0.175
0.95
for 20 involute stub
Zv
Zv
Z1
c o s 1
1 2 90
tan 2 i
Calculate
2
and
for
20
then 1
Z v 18
involute teeth
Design of Bevel,Worm and Cross Helical Gears 3.23
Replace Y v and P d in the above equation (1) then
b
Beam strength Fs [ b] b yv m t 1
R
... (2)
[b] allowable static strength in kg f cm 2
where
m t transverse module in cm.
b face width in cm.
Note
If b is not given in the problem, take from PSG
databook. P.No. 8.52
b 0.3 R or
10
Pd
B ut P d
Pc mt
0.3 R to 10 m t
R
cone distanc eor
Z21 Z22 in cm
0.5 m t
cone length
Dynamic load F d F t C v in kgf
For straight bevel. C v
3.5
vm
3.5
[when vm 5 m sec ]
where, vm mean velocity in m sec
75
HP
Tangential tooth load
v
m
F t Transmitted load
or
Refer PSG Data book Page. No. 8.51
Where vm mean velocity
d 1 av N 1
60 100
m sec
3.24
Design of Transmission Systems
R 0.5b
d 1 av m t Z 1
R
Calculate vm, F t and C v and substitute the values in
the equation of F d
Dynamic load F d F t C v
... (3)
For satisfactory design, F s F d.
To find transverse module
(m t,
Equate the
equations (2) and (3) and calculate m t in cm.
Take standard value of mt in mm from PSG Data
book P.No. 8.2 table (1).
Step 2
Buckingham’s Dynamic load from PSG Data book Pg
No 8.50
0.164 Vm cb F t
Fd Ft
cb F t
0.164 V m 1.485
(Similar to equation for the spur gear)
V m mean velocity in m/min
C calculation is similar to spur gear
b face width in cm
F t transmitted load in k gf
Fs Fd
Then the design is satisfactory based on
the Beam strength.
Design of Bevel,Worm and Cross Helical Gears 3.25
Note
If F s F d, change the transverse module m t, and
recalculate d1 av, vm, F t, F S, b and R.
Calculate again F d and check in the 2nd trail, If
F S F d then the design is satisfactory.
Step 3
Wear load F w
Note:
b d1 Q k
cos 1
d 1 PCD
of
pinion.
Z 1 m t cm
Fw Fd
Then the design tan 2 i
is
satisfactory 90
2
i
based on wear
Cal. 1
strength
If F w F d
then change the k calculate
as
material,
Similar to spur
recalculate k
Gear
Design
procedure.
and calcuculate again F w
In the 2nd
trail
Q
2i
i1
If F w F d
Then the design is satisfactory.
LEWIS METHOD
Problem 3.1 A pair of cast iron bevel gears connect two shafts
at right angles. The pitch diameter of the pinion and gear are
80 mm and 100 mm respectively. The tooth profiles of the gears
are of 14
1
composite form. The allowable static stress for both
2
3.26
Design of Transmission Systems
the gears is 55 MPa. If the pinion transmits 2.75 kW at
1100 rpm, find the module and number of teeth on each gear
and check the design for wear strength. Take surface endurance
limit as 630 MPa. and modulus of elasticity for cast iron as
84 kN/mm2
LEWIS METHOD
Solution:
Step 1:
Given Data:
Material for pinion and gear cast iron
Pitch diameter of pinion d1 80 mm
Pitch diameter of gear
d2 100 mm
Pressure Angle
14
1
2
Allowable Static Stress [b] 55 MPa 55 106 N/m 2
55 N/mm 2
. .
[ . 1 N /m 2 10 6N/mm 2]
Power P 2.75 kW 2.75 10 3 W
Speed of Pinion N 1 1100 rpm
Surface endurance e 630 MPa 630 10 6 N/m 2
630 N/mm 2
Modulus of Elasticity
E 1 E 2 84 kN/mm 2 84 10 3 N/mm2
Design of Bevel,Worm and Cross Helical Gears 3.27
Step 2:
Calculation of pitch angles
2 tan 1 i
i
d2
d1
100
1.25
80
2 tan 11.25
2 51.34
1 2 90
1 90 51.34
1 38.65
Step 3:
Selection of Materials
Pinion - Cast Iron
Gear - Cast Iron
Step 4:
Calculation of virtual number of teeth
Z v1
Z1
cos 1
In this problem, don’t assume Z 1 value
initially, because, we have to determine the accurate value
of Z 1.
Z1
Z v1
d1
m t c o s 1
d1
mt
80
m t cos 38.65
3.28
Design of Transmission Systems
Z v2
102.43
mt
d2
m t cos 2
100
m t cos 51.34
160.07
mt
Step 5:
Calculation of tangential load F t
Ft
Power
HP 75
kgf
vm
2.75 10 3
3.6666 H.P
750
d 1 mm
N rp m
vm
Ft
d1 N1
60 1000
80 1100
4.6076 m/s
60 1000
3.6666 75
59.682
4.6076
F t 59.682 kg f 596.82 N
10 Newton)
(1kg f ~
Step 6:
Calculation of Dynamic load Fd
F d C v Nsf km F t
km 1 from PSG data book pg 8.52 [Both gears
straddle mounted].
N sf 1 (Assume) From PSG data book pg 8.52
Design of Bevel,Worm and Cross Helical Gears 3.29
Cv
3.5
vm
3.5
Fo r straight bevel gears
For commercially cut wheels.
vm 5 m/s
From PSG Data Book pg 8.52.
Cv
3.5
4.6076
1.6132
3.5
F d C v N sf k m F t 1.6132 1 1 596.82
F d 962.8466 N
Step 7:
Calculation of strength of gear tooth F s
b
F s [ b] by v m t 1
R
yv 0.124
0.124
b 0.3R (Or)
10
Pd
1
0.684
F or 14 involute
2
Zv1
0.684 mt
102.43
0.124 6.6777 10 3m t
b
F s [b] m t b yv 1
R
0.3R
55 m t b 0.124 6.6777 10 3 m t 1
R
55 m t 0.3 64 0.124 6.677 10 3 m t 1 0.3
F s 287.96 m t 15.507 m 2t
3.30
Design of Transmission Systems
[R
1
d 21 d 22
2
1
80 2 100
2
2
64.03 ~
64 ]
Step 8: Calculation of transverse module m t
For safe design; F s Fd
287.96 m t 15.507 m 2t 962.8466
By solving this equation,
m t 4.37 or 14.19 14.19 is to o high, so neglected
m t 4.37 mm
From PSG Data book, the standard module
mt 5 mm pg 8.2
Step 9: Calculation of Face Width b
20 mm
b 0.3 R 0.3 64 19.2 ~
Step 10: Calculation of teeth Z1 & Z 2
d1 m t Z1 d 2 m t Z2
d1
d2
Z1
Z2
mt
mt
80
100
5
5
Z 1 16
Z 2 20
Design of Bevel,Worm and Cross Helical Gears 3.31
Step 11:
Calculation of pitch line velocity v m or v 1
v1 4.6076 m/s
Step 12:
Recalculation of strength of gear tooth Fs
F s 287.96 m t 15.507m 2t
mt 5
F s 287.96 5 15.507 52
1052.125 N
Step 13:
Calculation of wear load F w
Fw
d 1 b Q v kw
c o s 1
Zv1
102.43 102.43
20.486
mt
5
Zv2
160.07 160.07
32.014
mt
5
Qv
2 Z v2
Z v1 Zv2
2 32.014
1.295
20.486 32.014
1
1
[ 2e ] sin
E1 E2
kw
1.4
3.32
Design of Transmission Systems
[c] 630 N/mm 2
14
1
2
E 1 E 2 84 103 N /mm2
[630 2] sin 14
kw
1
1
1
2 84 10 3 84 10 3
1.4
2.36609
1.4
b 20 mm
kw 1.69
cos 1 cos 38.65 0.7809
Fw
d 1 b Q v kw
cos 1
80 20 1.2195 1.69
0.7809
3297.528
0.7809
F w 4222.72 N
Step 14:
Checking for Wear
Fw Fd
4222.72 N 962.84 N
The design is safe based on wear condition.
Answer
Module m 5 mm
Pinion Z1 16
Gear
Z2 20
Design of Bevel,Worm and Cross Helical Gears 3.33
Problem 3.2: Design a right angle bevel gear drive with speed
of pinion shaft 300 rpm and that of the gear shaft 150
rpm; pinion is to have 20 teeth of involute profile with module
of 20 mm and a pressure angle of 20 and is to be of suitable
material. Gear is of forged steel having allowable stress of
1500 kg/cm2, kW at gear shaft 56; Assume service factor
2;
(May / June - 2008)
LEWIS METHOD
Given Data:
Speed of pinion shaft N 1 300 rpm
Speed of gear shaft
N 2 150 rpm
No. of teeth on pinion Z 1 20 teeth
Module
m t 20 mm
Pressure angle
20
Gear is of forged steel with allowable static stress
[ b ]gear 1500 kgf/cm 2
Power at gear shaft
56 kW 56 10 3 watts
Service factor
2
i speed reduction
Z 1 20 teeth
Z 2 40 teeth
Z2
Z1
N1
N2
300
2
150
3.34
Design of Transmission Systems
R cone distance (or) cone length 0.5 mt
Z 21
Z 22
20 2 40 2
0.5 20
447.21 mm
Assume pinion is also made of same material, forged
steel,
[b]gea r 1500 kg f/c m2
The design is based on gear.
[Because, the power given is the power at gear shaft.]
Assume face width b 0.3R 0.3 447.21
134.163 mm
13.4163 cm
Step 1
b
Beam strength F s [ b ] b yv mt 1
R
... (1)
From PSG Databook, Pg No. 8.52
F S 1500 13.4163
13.4163
0.1438 2 1
44.721
12,728 kg f/cm
2
Beam Strength
FS 12,728 kg f/cm 2
ZV
Z1
cos 1
Z2
cos 2
But
1 2 90 ; tan 2 i 2
2 63.43
Design of Bevel,Worm and Cross Helical Gears 3.35
ZV
40
cos 63.43
1 90 2 26.57
89.42 90 teeth
y v 0.154
0.154
0.912
Z V gear
0.912
90
0.1438
Step 2
Transmitted load (or) tangential tooth load F t H P
Power transmitted by gear shaft 56 kW
76.08 HP
vm mean velocity
d2
d1 av N1
60 100
d2
av
N2
60 100
m/sec
m /sec
R 0.5b
m tZ 2
av
R
447.21 0.5 134.163
20 40
447.21
680 mm 68 cm
vm
68 150
5.34 m /sec
100 60
or
75
vm
3.36
Design of Transmission Systems
Transmitted load F t
76.08 75
5.34
1068.53 kgf/cm 2
Buckingham’s dynamic load
0.164 Vm cb F t
Fd Ft
cb F t
0.164 V m 1.485
F t 1068.53 kg f/cm2
V m 5.34 60 320.4 m/min
b 13.416 cm
For (c) value, from table (42)
for 10 mm module e 0.09 mm
Commercially cut gears
for 20 mm module also, take same value.
From table (41),
20 involute teeth form,
c 11860 0.09 1067.4
Buckingham Dynamic load
0.164 Vmcb F t
Fd Ft
cb F t
0.164V m 1.485
0.164 320.4 1067.4 13.416 1068.53
F d 1068.53
1067.4 13.416 1068.53
0.164 320.4 1.485
52.54515388.7684
1068.53
52.545 184.216
1068.53 3415.27 4483.8 kgf/cm 2
Design of Bevel,Worm and Cross Helical Gears 3.37
Beam strength F S 12,728 kg f/cm2 ; F d 4483.8 kgf/cm 2
FS Fd
The design is satisfactory based on beam strength.
Step 3
To check for wear strength,
Fw
b d 1 Qv k w
cos 1
b face width 13.4163 cm
d1 m tZ 1 20 20 400 mm 40 cm
Qv
22 4
2i
1.333
i1 21 3
1 26.57
k [ c ]2
sin 1
1
1.4 E 1 E 2
[ c ] C R H RC k cl
P.No. 8.16 PSG Data book
220 60 0.6177
8153.83 kg f/cm 2
. .
. Forged steel, HRC 55 to 63
Take HRC 60
C R 220
k cl assume life 10,000 hrs Refer PSG Data book
(P.No. 8.17)
3.38
Design of Transmission Systems
N 300 60 10,000
18 10 7 cycles
kcl
6
107
N
6
10 7
18 10 7
0.6177
Take
E 1 E 2 2.15 10 6 kgf/cm 2
k w 8153.83 2
P.No. 8.14 PSG Data book
sin 20
1
1
1.4 2.15 10 6 2.15 10 6
15,109 kg/cm2
Fw
13.4163 40 1.33 15.109
cos 26.57
12,057 kg f/cm 2,
But F d 4483.8 kgf/cm 2
[ Fw Fd]
Therefore, the design is satisfactory based on wear
strength.
Problem
3.3: A pair of 20 full depth involute teeth bevel
gears connect two shafts at right angles having a velocity ratio
of 3:1. The gear is made of cast steel with permissible stress
of 100 N/mm2. The pinion transmits 37.5 kW at 750 rpm.
Determine (1) module and face width and (2) pitch diameters.
Assume face width
1
Length of Pitch cone.
3
(Nov/Dec 2007)
Design of Bevel,Worm and Cross Helical Gears 3.39
LEWIS METHOD
Given Data:
Pressure angle 20
i3
Permissible stress [ b] 100 N /mm 2 10
1000 kgf/c m2
P 37.5 kW 50.95 HP .
1 HP 736 Watts
Speed of pinion N 750 rpm
Face width
b
1
Length of pitch cone
3
1
R
3
(Pitch cone length (or) cone distance)
From PSG data book, F s
[b] b Yv [1
b
]
R
Pd
(Replace Y v & P d
b
F s beam strength [b] b yv mt 1
R
Yv yv
Pd
Pc m t
1
mt
3.40
Design of Transmission Systems
1000
1
1
R 0.1125 m t 1
3
3
78.539 m t R kg f
1 2 90
Zv
Z1
cos 1
20
21.08 22
cos 18.53
(assume Z 1 20 teeth
tan 2 i 3
yv 0.154
2 71.56
0.912
0.912
0.154
Zv
22
0.1125
1 18.43,
Beam strength F s 78.53 m t R kg f
... (1)
Dynamic load F d F t C v
F t HP
75
vm
But
Power (P) 37.5 kW
50.95 HP
vm
Z 1 20 teeth
Z 2 i Z 1 3 20 60 teeth
Z 22
R 0.5 m t
Z 21
R 0.5 m t
20 2 60 2
31.62 m t cm
vm
d1av N 1
100 60
d1
d av N 1
100 60
m/sec
R 0.5b
mt Z1
av
R
0.5R
R
3
mt Z 1
.
R
R 0.166 R
mt
R
Design of Bevel,Worm and Cross Helical Gears 3.41
16.6797 mt 750
60 100
6.55 mt m/sec
F t T ransmitted load
50.95
75
6.55 m t
583.396
kgf
mt
Cv
6.55 m t
vm 3.5
3.5
3.5
3.5
Dynamic load Fd F t C v
t
6.55 m
583.396 3.5
mt
3.5
... (2)
Substitute the value of R in Eq. (1)
Beam Strength F s 78.53 m t R
78.53 m t 31.62 m t
2483.1186 m t2 kgf
... (1)
Equate eq (1) and eq (2); Fs Fd then check
Fw Fd
m t2
t
6.55 m
583.396 3.5
mt
3.5
Calculate m t by trial and error method,
3.42
Design of Transmission Systems
Trail 1
Let m t 0.5 cm
LHS 620.779
RHS 1770.08
LHS RHS
Not Satisfactory
Trail 2
Let m t 0.6 cm
LHS 893.922
RHS 1523.05
LHS RHS
Not satisfactory.
Trail 3
Let m t 0.65 cm
LHS 1049.1176
RHS 1426.65
LHS RHS
Not satisfactory
Trail 4
Let m t 0.62 cm
LHS 954.51
LHS RHS
Not satisfactory.
; RHS 1482
Design of Bevel,Worm and Cross Helical Gears 3.43
Trail 5
Let m t 0.7
LHS 1216.72 ; RHS 1343
LHS RHS
Not satisfactory
Trail 6
Let m t 0.72
LHS 1287.24
RHS 1313
LHS RHS
Not satisfactory
Trail 7
Let m t 0.725
LHS 1305.18 ;
RHS 1305.69
LHS RHS
Therefore, select
m t T rans verse m odu le 0.725 mm 7.25 cm
According to the standard value of normal module mt
Refer PSG Data book P. No. 8.2 and Table 1
The standard normal module mt 8 mm
Cone distance
R 31.62 m t 31.62 0.8 25.296 c m
3.44
Design of Transmission Systems
Cone distance
152.96 mm
(or)
Face width: b
Length
of
pitch
cone
(R)
R 252.96
84.32 mm
3
3
Pitch diameters:
Pitch dia. of pinion d1 m tZ 1 8 20 160 mm
Pitch dia. of wheel d2 m tZ 2 8 60 480 mm.
Here check F w F d
Problem 3.4 Design a bevel gear to transmit a power of 9
kW at 200 rpm of the pinion. Gear Ratio is 3, material used
is C20. Ultimate tensile strength u is 500 N/mm2, Yield
strength y is 260 N/mm2
(May/June 2013)
LEWIS METHOD
Solution:
Step 1:
Given Data:
Power 9 kW 9 10 3 W
Pinion Speed N 1 200 rpm
Gear Ratio
i 3
Material used for pinion and gear C20
u (ultimate strength) 500 N/mm 2
y (yield strength) 260 N/mm 2
Design of Bevel,Worm and Cross Helical Gears 3.45
Step 2:
Selection of Materials
Pinion C20 ; Gear C20
Step 3:
Calculation of pitch angles 1 & 2
tan 2 i
2 tan 1 3
2 71.56 ; 1 2 90
1 90 71.56
1 18.43
Step 4:
Calculation of virtual number of teeth
Z v1
Z2
Z1
Z1
cos 1
Z 1 20 (Assume)
20
22
21.08 ~
cos 18.43
i
Z 2 3 22
Z 2 66
Z v2
Z2
cos 2
66
cos 71.56
3.46
Design of Transmission Systems
209
Z v2 2086 ~
Step 5:
Calculation of tangential load F t
Ft
HP 75
kgf
vm
Power
9 10 3
HP
750
d 1 m tZ 1
d 1 20m t
12 HP
v1
v1
d 1N 1
60
20 mt 200
60 1000
209.439
mt m/s
100
v1 0.2094 mt m/s
Ft
12 75
0.2094 mt
Ft
4297.99
kg f
mt
Step 6:
Calculation of Dynamic load Fd
F d C v N sf k m Ft
Cv
vm
3.5
3.5
From PSG data book pg No. 8.52
Design of Bevel,Worm and Cross Helical Gears 3.47
N sf 1 ; k m 1 (both gears straddle mounted)
Assume vm 5 m /s
Cv
5
3.5
3.5
1.6388
Fd
1.6388 1 1 4297.99
mt
Fd
70435.53
7043.553
kgf
N
mt
mt
Step 7:
Calculation of strength of gear tooth F s
b
F s [ b] b yv m t 1
R
[ b]
b
u
3
500
166.66 N/mm 2
3
R~
0.33 R
3
b 0.33 R
b 10.43 mt
R1
mt
2
mt
2
Z 21
Z22
20 2 60 2
R 31.62 mt
3.48
Design of Transmission Systems
yv 0.154
0.912
Zv
1
0.154
For 20 Involute 20 (Assume)
0.912
22
yv 0.1125
F s 166.66 10.43 mt 0.1125 m t 1 1/3
409.56 m 2t N
Step 8:
Calculation of transverse module m t
We know that
Fs Fd
409.56 m 2t
70435.53
mt
m 3t
70435.53
409.56
m t 3
171.978
m t 5.56 mm
6 mm
mt ~
(From psg Data Book Pg. 8.2 1 Table 1.
Step 9:
Calculation of face width (b)
b
R~
10 mt 10 6
3
b 60 mm
Design of Bevel,Worm and Cross Helical Gears 3.49
Step 10:
Calculation of pitch circle diameter d 1
d 1 m 1Z1
6 20
d 1 120
Step 11:
Calculation of pitch line velocity v 1
v1 0.2094 m t m/s
1.2564 m/s
Step 12:
Recalculation of strength of gear tooth Fs
F s 409.56 m 2t N
409.56 36
14744.16 N
Step 13:
Calculation of Buckingham’s Dynamic Load Fd
0.164 Vm cb F t
Fd Ft
cb Ft
0.164 V m 1.468
Ft
4297.99
kgf
mt
3.50
Design of Transmission Systems
4297.99
kgf
6
7163.3 N
716.33 kg f ~
V m V 1 1.2564 m/s 60 m/m in
6 cm
b 60 mm ~
c 11860 e for steel
e 0.015 m 6 mm Precis ion gears
c 11860 0.015
c 177.9 kg f/cm
Fd Ft
0.164 V m cb F t
0.164 V m
1.468 cb F t
substitute F t in kg f
b in cm
V m m/min
vm m/s
c kg f/cm
then we obtain F d in kg f
0.164 1.2564 60177.9 6 716.33
716.33
177.9 6 616.33
0.164 1.2564 60 1.468
716.33
22052.2118
74.36
716.33 296.548
10128.7 N
F d 1012.87 kgf ~
Design of Bevel,Worm and Cross Helical Gears 3.51
Step 14:
Checking for beam strength
Fs Fd
14744.6 10128.7
The design is safe.
Step 15:
Calculation of Wear Load Fw
Fw
d 1bQvkw
cos 1
d 1 120 mm
b 60 mm
Qv
2Zv2
Z v1 Z v2
2 209
1.809
22 209
cos 1 cos 18.43 0.9487
Fw
Assume kw 1 N /mm 2
kw -load stress factor.
120 60 1.809 1
cos 1
13729.102 N
Step 16:
Checking for Wear Strength
For satisfactory Design.
Fw Fd
13729.102 10128.7 N
The design is safe based on wear strength.
3.52
Design of Transmission Systems
Step 17:
Calculation of Basic Dimensions of Straight Bevel
Gear.
From PSG Data book pg no. 8.39.
1. Reference (or) Lead Angle
1 18.43
2 71.56
2. Addendum Angle a
mtf0
a1 a2 tan 1
R
61
tan 1
190
a1 a2 1.8
R 31.62 m t
31.62 6
~
189.72 190 mm
3. Dedendum Angle f
f0 c
f1 f2 tan 1 mt
R
6 1 0.2
tan 1
190
tan 1 0.03789
f1 f2 2.17
4. Height Factor 0
0 1
Design of Bevel,Worm and Cross Helical Gears 3.53
5. Tip Angle a
a1 1 a1 a2 2 a2
18.43 1.8 71.56 1.8
20.23
73.36
6. Root Angle t
t1 1 f1
18.43 2.17
f1 16.26
t2 2 f2
71.56 2.17
t2 69.39
7. Virtual number of teeth
Z v2 22 ; Z v2 209
Problem 3.5 Design a pair of bevel gears to transmit 15 kW
at the pinion speed of 1600 rpm, and the gear ratio is 4.
Material for gears 15 Ni 2 cr Mo 15 / steel. The tooth profiles
of the gears are of 20 composite form.
LEWIS METHOD
Solution
Step 1
Given Data
P 15 kW 15 10 3 W
N 1 pinion 1600 rpm
Gear ratio (i) 4
Material for pinion and gear 15 Ni 2Cr Mo 15 /
steel.
Pressure angle 20
3.54
Design of Transmission Systems
Step 2:
Selection of Material
Pinion - 15 Ni 2 Cr 1 Mo 15 / steel
Gear - 15 Ni 2 Cr 1 Mo 15 / steel
Step 3:
Calculation of Pitch Angles 1 & 2
tan 2 i
1 2 90
2 tan 14
1 90 75.96
2 75.96
1 14.03
Step 4:
Calculation of virtual number of teeth
Z v1
Z v2
Z1
Assume Z 1 20
c o s 1
20
20.6 ~
21
c o s 14.03
Z2
cos 2
Z2
Z1
i
Z 2 4 20
Z 2 80
80
330
329.76 ~
cos 75.96
Steps 5:
Calculation of tangential load F t
Ft
HP 75
kg f
vm
P
15 10 3
H.P
750
P 20 H.P
d1 m t Z1
d1 20m t
Design of Bevel,Worm and Cross Helical Gears 3.55
vm
d 1N 1
60 1000
Ft
HP 75
kgf
Vm
20 75
1.6755 m t
895.255
kg f
mt
20m t 1600
60 1000
1.6755 m t
Step 6:
Calculation of Dynamic Load F d
F d Cv N sf k m F t
Cv
3.5
vm
3.5
5 m/s
Ass ume vm ~
[For bevel gears vm 5 m/s]
Choose k m & N sf From PSG data book pg 8.52
N sf 1 ; k m 1
[ both gears are straddle
mounted (Assume) ]
Cv
5
3.5
1.6388
3.5
Fd
1.6388 1 1 895.255 1467.212
kg f
mt
mt
Fd
14672.12
N
mt
3.56
Design of Transmission Systems
Step 7:
Calculation of strength of gear tooth
b
F s [ b] byv 1 m t
R
Choose [ b] From PSG Data book pg.8.5
(For 15 Ni 2Cr 1 Mo 15 / steel.) (m t upto 6)
[ b] 3200 kgf/cm 2
1 kgf/cm 2
320 N/mm 2
1
N/mm 2
10
320 N /mm2
Always Assume b
R
1
R
3
mt
2
mt
2
Z 21
Z 22
20 2 80 2
R 41.23 mt
yv1 0.154
0.912
For 20 Involute, From PSG data
Z v1
book pg 8.50
yv 0.154
0.912
yv 0.1105
21
Design of Bevel,Worm and Cross Helical Gears 3.57
F s [ b] b y v1 1
b
mt
R
R
1
320 R 0.1105 1
mt
3
3R
41.23
320
m t 0.1105 0.666 m t
3
F s 1016.78 m 2t
Step 8:
Calculation of Transverse module m t
We know that
Fs Fd
1016.78 m 2t
14672.12
mt
m 3t
14672.12
1016.78
2.43
mt ~
From PSG Data book Pg. 8.2; Table 1 standard
module
mt 3 mm
Step 9:
Calculation of face width (b)
b 0.3 R
0.3 123.69 37.107
38 mm
b~
R 41.22 m t
41.23 3 123.69
124 mm
R~
3.58
Design of Transmission Systems
Step 10:
Calculation of pitch circle diameter d 1
d1 mt Z 1
3 20
d1 60 mm
Step 11:
Calculation of pitch line velocity v1
vm v1l
d 1 1600
60 1000
60 100
60 1000
5.0265 m/s
Step 12:
Recalculation of strength of gear tooth Fs
F s 1016.78 m 2t
1016.78 9
9151.02 N
Step 13:
Calculation of Buckingham’s Dynamic Load Fd
0.164 V m cb F t
Fd Ft
cb F t
0.164 V m 1.485
Ft
895.255
kgf
mt
298.418 kgf
Design of Bevel,Worm and Cross Helical Gears 3.59
To determine vm for bevel gear, take largest pitch
circle dia of gear.
d2
d1 60 mm
d1
N1
N2
d2 4 60
i
N 2 N 1/i
i
d2 240 mm
1600
4
N 2 400 rpm
vm
d2 N 2
60 1000
240 400
60 1000
vm 5.0265 m/s
From PSG data book pg 8.53 ; Table 41 & Table 42.
For 20 Full depth steel and steel 11860 e
e 0.0125 (Precision gears)
38 mm 3.8 cm
b~
c 1160 0.0125
148.25 kgf /c m
To calculate F d
Substitute V m in m/min ; b in cm
F t kg f
Then obtain F d in kg f.
b 38 mm 3.8 cm
3.60
Design of Transmission Systems
V m 5.0265 60 m/min
301.5 m/m in
0.164 V m cb F t
Fd Ft
cb Ft
0.164 V m 1.468
0.164 301.59 148.25 3.8 298.418
298.418
148.25 3.8 298.418
0.164 301.59 1.468
298.418
42623.70
236.11
298.418 180.52
F d 478.9 kgf ~
4789 N
Step 14:
Checking for beam strength
Fs Fd
9151.02 4789
The design is safe.
Step 15:
Calculation of Wear Load Fw
Fw
d 1b Q v kw
cos 1
d 1 60 mm ; b 38 mm
Qv
2Z v2
Z v1 Z v2
2 330
1.8803
21 320
Design of Bevel,Worm and Cross Helical Gears 3.61
cos 1 cos 14.03 0.97
1
1
[2e ] sin
E2
E
1
kw
1.4
20
From Data book pg 8.14 ; Table 9. (steel & steel)
E 1 E 2 2.15 106 kg f/cm 2
2.15 10 5 N /mm2
kw load Stress Factor
e 55 kg f/mm2 (steel) From PSG Data book pg
No.85; Table 7
e 550 N/mm2
1
1
5502 sin20
5
5
2.15 10
2.15 10
kw
1.4
0.687 N/mm2
Fw
d 1 b Q v kw
cos 1
60 38 1.8803 0.687
0.97
F w 3038.3 N
Step 16:
Checking for wear strength
F w 3038.3 N ; F d 4789.04 N
3.62
Design of Transmission Systems
Fd Fw
The design is not safe.
To increase the wear load, we have to increase the
load stress factor k w
kW 0.687 N/mm 2 ; New kW 2.5 N/mm 2 Assum e
Fw
d 1 b Q vkw
cos 1
60 38 1.8803 2.5
cos 14.03
11047.26 N
Now F w F d
Now the design is safe.
Step 17:
Calculate the Basic Dimension of Straight Bevel Gear
From PSG Data book pg 8.39
1. Reference (or) lead Angle
tan 2 i
2 75.96
1 14.03
2. Addendum Angle a
tan a1
m t fo
R
tan a2
31
a 1 tan 1
124
fo 1
Design of Bevel,Worm and Cross Helical Gears 3.63
a 2 a1 1.3859
3. Dedendum Angle f
tan f1 tan f2
m t f0 c
c 0.2
R
3 1 0.2
f1 f2 tan 1 29.67 10 3
124
f1 f2 1.704
4. Height Factor f0
f0 1
5. Tip Angle a
a1 1 a1
14.03 1.385
15.415
a2 2 a2
a2 75.96 1.385
a2 77.345
6. Root Angle t
14.03 1.704
12.326
t2 2 t2
t1 1 t1
75.96 1.704
7. Virtual number of teeth
Z v1 21 ; Z v2 330
74.256
3.64
Design of Transmission Systems
3.11.(a) DESIGN PROCEDURE FOR BEVEL GEAR
(BASED ON HERTZ METHOD)
Step 1
Selection of material:
P.No. 8.16 Table (16) or Table (5) P.No. 8.4 of
PSG Data book.
Similar to Spur and helical gear.
If pinion and gear are made of same material, design
for only pinion (because pinion is weaker than gear)
Select material, surface hardness.
If surface hardness 350 BHN
o r 55 to 63 RC
or 40 to 55 RC
The core hardness 350 BHN
Step 2
Calculate equivalent Young’s modulus.
From PSG Data book P.No. 8.14 table (9)
Read
young’s
modulus
E 1, E2
according
material.
Find the equivalent Young’s modulus E eq
kg /cm2
N
f
to convert
10
mm2
Step 3
Assume life 10,000 hrs to 20,000 hrs.
to
the
Design of Bevel,Worm and Cross Helical Gears 3.65
If life is given in the problem,
Calculate life N in terms of cycles.
i.e.,
N Life required Given life in Hrs RPM 60 C ycles
Represent life interms of ...... 10 7 cycles
Step 4
Calculation of Design bending stress [ b ]
From PSG Data book P.No. 8.18
(similar to spur and helical gears)
Design bending stress [ b ]
1.4kbl 1
n k
kbl Life factor for bending From PSG Data book
P.No. 8.20; table (22) (consider core hardness).
It depends on material, Surface hardness and life in
cycles.
1 Endurance limit stress in bending for complete
reversal stress in kg f/cm 2 From PSG Data book P.No.
8.19; Table (19). According to material of mating gear,
take u and y values from From PSG Data
book P. No. 8.5 Table (7) in kgf/cm 2;
u ultimate stress in kg f/cm 2(Refer P.No. 1.9 of
PSG Data book)
y yield stress in kg f/cm 2
n Factor of safety
Table (20); P.No. 8.19 of PSG Data book
3.66
Design of Transmission Systems
According to material, mode of manufacture and heat
treatment.
k Fillet stress concentration factor From PSG
Data book P.No. 8.19 Table (21). Take addendum
modification coefficient.
0 X 0.1 value and according to material and heat
treatment.
Calculate design bending stress [ b ] in kg f/cm 2
Convert into N/mm 2
kgf/cm2
10
N/mm 2
Step 5
Calculation of Design surface contact compressive
stress. Fron PSG Data book P.No. 8.16
[ c ] C RHRC kcl kg f/cm2
C R Coefficient depending on the surface
hardness. From PSG Data book Table (16)
P.No. 8.16.
Depends on material, heat treatment and hardness.
HRC Rockwell ‘C’ hardness number Table (16)
P.No. 8.16
kcl Life factor From PSG Data Table (17),
P.No. 8.17 (Consider surface hardness)
It depends on material, surface hardness and life in
number of cycles.
Design of Bevel,Worm and Cross Helical Gears 3.67
Calculate [ c ] in kg f/cm 2
Step 6
Calculation of Design torque of twisting moment
[ M t ] P.No. 8.15 PSG Data book
Design twisting moment [ M t ] Mt k d k
M t Nominal twisting moment transmitted by the
pinion kg f cm .
From PSG Data book Pg No. 8.150
97420 kW
N
kW nominal power transmitted in kW
N speed of rotation of pinion rpm
k load correction factor. Table (14) (P.No. 8.15) of
PSG Data book.
kd dynamic load factor. Table (15) (P.No. 8.16) of
PSG Data book.
k value depends on IS quality and b/d 1 ratio
kd value depends on IS quality and pitch line velocity
Since the values of b, d1 pitch line velocity, and IS
quality are not known, initially assume k d k 1.3 for
symmetric scheme. Calculate M t in kg f cm .
And [ M t ] Mt k d k in kg f cm .
[ kg f cm 100 Nmm ]
3.68
Design of Transmission Systems
Step 7
Calculate Cone distance ‘R’
P.No. 8.13 table (8) of PSB Data book
R y
i 1
2
y
3
2
0.72
E[ M t ]
cm
0.5 [ ]
i
c
y
R
table (13) From PSG Data book P.No. 8.15
b
Assume y 3 (or) 4 (based on i value)
i speed ratio
Z2
Z1
[ c ] Design surface (contact compressive) stress
kg /cm 2
E Equivalent Young’s modulus kg/cm 2
[ M t ] Design twisting moment kg-cm.
Step 8
Calculation of m t transverse module
From PSG Databok P.No. 8.38 table (31)
R 0.5 m t Z 1
i2 1 (or) R 0.5 m t
Z21
Z22
Assume Z 1 20 to 30
Represent cone distance R in mm.
Calculate m t in mm
Design of Bevel,Worm and Cross Helical Gears 3.69
Take standard module m t
i speed ratio
Z2
Z1
From PSG Data book P.No. 8.2 table (1)
Represent transverse module mt in mm
Step 9
b
Calculate
d1av
to find (k)
k Load concentration factor:
To find d 1av
m m mav m t
b sin 1
Z1
From PSG Data book P.No. 8.38 table 31
Cal. v pitch line velocity
d1 av N 1
60 1000
m sec
Cal. d1av in mm
Calculate
b
d1 av
d1 av
mm Z
1
ratio .
From PSG Data book Table (14): P.No. 8.15 Take
the value of k
k value depends on
b
value and surface hardness.
d1 av
3.70
Design of Transmission Systems
Step 10
Selection of IS Quality (From PSG Data book
P.No.8.3) Table 2
Calculate pitch line velocity v
d1av N 1
60 1000
m sec
Corresponding to velocity (m/sec) select the preferred
quality.
Step 11
Read the value of kd
From PSG Data book
P.No. 8.16 table 15
It depends on Pitch line
velocity (m/sec)
Read the value of k d
Corresponding to pitch line
kd dynamic load factor
velocity, Surface hardness and preferred quality.
Step 12
Recalculate [M t]- Design twisting moment.
[M t] M t kd k
M t from step 6 kgf cm
kd from step 11
kgfcm 100 N mm
k from ste p 9
Represent [Mt] in kg cm
Step 13
Calculation of induced bending stress b
Design of Bevel,Worm and Cross Helical Gears 3.71
From PSG Data book P.No. 8.13A; table (8)
b
R
i2 1 [M t]
2
R 0.56 b mt yv
R Cone distance
1
[b]
cos
pressure angle ;
(cm);
20
i Speed ratio;
[M t] Design to rque kg cm ;
m t Transverse module cm
yv form factor
Z eq Z v
Z1
cos 1
Refer PSG Data book table (18) P.No. 8.18 at
X 0 (Addendum modification coefficient) and Z v
Read yv value either directly (or) by interpolation.
Note: If b [b]
Increase the value of m t
Recalculate:
(R)
;
Pitch line velocity. v
(b)
;
kd, k
m av
;
[M t ]
d1a
v
Calculate b (induced bending stress)
Check again b
If b [b]
Then the
satisfactory.
design
based
on
beam
strength
is
3.72
Design of Transmission Systems
Step 14
Calculate induced surface contact compressive stress
c
From PSG DAta book P.No. 8.13 table (8)
0.72
c
R 0.5b
i2 13
ib
E [M t] [ c]
Note: If c, b are less than design stresses [ c] and [b]
respectively, then the design is satisfactory.
If pinion and wheel are made of different materials.
First design pinion and then check the stresses in the
wheel.
Procedure Step (1)
For wheel material,
Calculate design bending stress [b ] [ b ]w heel
2
and design surface contac t
c C
compressive stress
2
w heel
similar to step 4
and step 5
Assume
c
pinion
wheel
c
wheel
[c]W heel
Life for wheel
N cycles
If
c
wheel
[c]w heel,
Life of pinion
i
Design of Bevel,Worm and Cross Helical Gears 3.73
Change the material and recalculate
[ c]wheel and
check again.
If c [c]wheel , then the design is satisfactory.
To check b,
b y v b y v
1
1
2
y v form factor for pinion
2
1
b induced bending Already
1
calculated
stress for pinion
in step 13
Zv
1
Z1
cos 1
y v form factor for wheel
2
Zv
2
Z2
cos 2
Calculate b and check b
2
2
b [b ] i.e. [ b]wheel
2
2
FORMULAE FOR GEAR FORCES
From PSG Data book P.No. 857 table 46
(a) Spur Gear
Tangential force F t
2 Mt
d1
M t twisting moment
97420
kW
kgf cm
N1
where N 1 pinio n speed in rpm
d 1 pinion pitch circle diameter
Radial force F r F t tan
(where pressure angle 20
3.74
Design of Transmission Systems
(b) Helical Gear
Tangential force Ft
Radial force F r F t
2M t
d1
tan
cos
(c) Bevel Gears: (Straight bevel)
2 Mt
2M t
Tangential force F tav
dav
b
d
1
0.5
1
R
Radial force F r F t tan cos 1, for pinion
av
F t tan cos 2 fo r wheel
av
Axia l fo rce F a F tav. tan sin
F tav tan sin 1 for pinion
F tav tan sin 2 for w heel
(d) Bevel (Spiral) Gear
Tangential force F t:
F tav
2M t
d av
Where
b Pres sure angle 20
d1 1 0.5
R helix angle
2M t
18 to 25
Design of Bevel,Worm and Cross Helical Gears 3.75
Radial force Fr
F tav
c o s av
tan cos sin av sin
Axial force F a
F tav
cos av
tan sin sin av c o s
av mean spiral a ngle 30 to 35
35 preferred
Pressure angle 20
reference angle
1 semico ne angle of pinion
2 semicon e angle of wheel
(a) For right angle (when 90
tan 2 i
Z2
Z1
1 90 2
(b) For acute angle when 90
tan 1
sin
i cos
(c) Objective angle, when 90
tan 1
sin 180
i c o s 180
1 2
3.76
Design of Transmission Systems
Problem 3.6 Design a bevel gear drive to transmit 7 kW at
1600 rpm for the following data.
Gear ratio
:
Material for pinion and gear :
Life
:
3
C45 steel
10,000 hrs.
(May/June 2013)
HERTZ METHOD
Given data
P 7 kW ; N 1600 rpm ; i 3 ; N 10,000 hrs
Solution
Selection of material
Since the given material for pinion and wheel are
made of same material (i.e) C45 steel, therefore, design only
pinion.
From PSG Data book, Pg.No. 8.16, Table 16
corresponding to C45 steel.
Assume surface hardened heat treatment,
HRC 40 to 55 HRC 50 (Assume)
(ie) sufarce hardness > 350 BHN
core hardness < 350 BHN
Step 2: Life of gears
N 10,000 hrs 10,000 60 1600 96 10 7 cycles
Step 3: Equivalent Young’s modulus
From PSG Data book, From PSG Data book Pg.No.
8.14, Table offer
E 2.15 10 6 kg f/cm 2 2.15 10 5 N/mm 2
Design of Bevel,Worm and Cross Helical Gears 3.77
Step 4: Calculation of design bending stress [b]
From PSG Data book, Pg.No. 8.18,
[b]
1.4 kbl 1
n k
From PSG Data book Pg.No. 8.20, Tabl;e 22.
Assume rotation in one direction only, consider core
hardness 350 BHN; N 10 7 cycles
kbl 1
From PSG data Blook Pg.No. 8.19, Table 19, for
forged steel
1 0.25 u y 500 kgf/cm2
From PSG Data book Pg.No. 1.9, for C45 steel,
u 63 71 kgf/mm 2; y 36 kgf/mm 2
Assume
u 70 kg f/mm 2 70 100 kg f/cm 2
1 0.25 70 100 36 100 500 3150 kg f/cm 2
From, PSG Data book Pg.No. 8.19, Table 20
for forged steel and surface hardened
n 2.5
From PSG Data Book Pg.No. 8.19, Table 21
for steel, surface hardened at 0 X 0.1
k 1.5
3.78
Design of Transmission Systems
Design bending stress [b]
1.4 1 3150
1176 kg f/c m2 117.6 N/mm 2
2.5 1.5
Step 5: Calculation of
compressive stress [c]
design
surface
contact
From PSG Data book, Pg.No. 8.16
[c] C R HRC kcl
From PSG Data book, Pg.No. 8.16, Table 16
for C45 - surface hardened steel
C R 230
HRC 50
From PSG Data book, Pg.No. 8.17, Table 17,
Assuming steel, surface hardness > 350,
N 25 10 7
kcl 0.585
[c] 50 230 0.585 6727.5 kgf/c m2 672.75 N/mm2
Step 6: Calculation of design torque
From PSG Data book Pg.No. 8.15,
[M t] M t kd k
But
M t 97420
kW
7
97420
426.21 kgf cm
n
1600
Assume initially, k kd 1.3 (for symmetric)
[M t] 426.21 1.3 554.07 kgf cm 554.07 10 2 Nmm
Design of Bevel,Worm and Cross Helical Gears 3.79
Step 7: Calculation of cone distance ‘R’ From PSG
Data book Pg.No. 8.13, Table 8
R y
i2 1
3
2
0.72
E [Mt]
0.5 [ ]
i
c
y
From PSG Data book, Pg.No. 8.15, Table 13
for i 3, Assume y 3
R3
3 1
2
3
2
5
2.15 10 554.07 10
0.72
3 0.5 672.75
3
2
R 97.67 mm
Step 8: Calculation of Transverse module ‘m t’
From PSG data book Pg.No. 8.38, Table 31,
R 0.5 m t Z1
i2 1
Assume Z 1 20 teeth
97.67 0.5 m t 20
32 1
m t 3.08 mm
Represent traverse module terms of standard module,
From PSG Data book Pg.No. 8.2, Table 1,
m t 5 mm
Note: If we hoose m t 4 mm , then the design will be not
safe, To avoid recalculation, always choose higher standard
module m t.
3.80
Design of Transmission Systems
Step 9: Recalculate “R ” and calculate “b”
R 0.5 m t Z 1
32 1 158.113 m m
i2 1 0.5 5 20
From PSG Data book, Pg.No. 8.15, Table 13
y
R
3
b
b
R 158.113
3
3
b 52.7 mm
Step 10: Calcualtion of k and
b
d 1av
From PSG Data book, Pg.No. 8.15, Table 14
Average module
sin 1
m av m t b
Z1
but
tan 2 i 3
2 tan 1 3 71.56
1 90 71.56 18.43
m av 5
52.7 sin 18.43
20
m av 4.16 mm
But
d1av Z 1 m av 20 4.16 83.33 mm
Design of Bevel,Worm and Cross Helical Gears 3.81
52.7
b
0.6323
d 1av 83.33
From PSG Data book, Pg.No. 8.15, Table 14 for
surface hardness > 350 for both the gears
k 1.6
Step 11: Selection of IS Quality
From PSG Data book, Pg.No. 8.3, Table 2.
Pitch line velocity v
v
d1av N
60 1000
83.33 1600
6.98 m/s
60 1000
According to velocity, straight bevel, select IS quality
- 8 steel
Step 12: Read the value of k d
From PSG Data book, Pg.No. 8.16, Table No: 15,
corresponding to IS Quality - 8, surface hardness > 350
and v upto 8 m/s
kd 1.4
Step 13: Recalculate design twisting moment [M t]
[M t] M t kd k 426.21 1.4 1.6 954.71 kg f cm
[M t] 95471 Nmm
Step 14: Calculation of induced bending stress b
From PSG Data book, Pg.No. 8.13 A, Table 8
b
R
i2 1 [Mt]
2
R 0.5b b mt yv
1
[ b]
cos
Design of Transmission Systems
3.82
From PSG Data book, Pg.No. 818, Table 18,
Zv
Z1
cos 1
20
21.08 ~
21 teeth
cos 18.43
Take average value of 20 and 22 teeth
y v 0.3955
pressure a ngle 20 assume
b
32 1 95471
158.113
2
158.113 0.5 52.7 52.7 5 0.3955
1
cos 20
28.076 N/mm 2 [b] 117.6 N /mm 2
The design of pinion based on beam strength is
satisfactory.
Step 15: Calculation of induced surface stress
From PSG Data book, Pg.No: 813, Table 8
c
0.72
R 0.5b
i2 13
ib
0.72
158.113 0.5 52.7
E [M t]
2.15 10 95471
3 52.7
3 2 13
5
350.128 N/mm2 [c]672.75 N /mm 2
The design based on wear strength is satisfactory.
Problem 3.7 A 25 kW motor running at 1200 rpm drives a
compressor
at
780
rpm,
through
a
90
bevel
gearing
arrangement. The pinion has 30 teeth. The pressure angle of
teeth is 20. Both the pinion and gear are made of heat treated
Design of Bevel,Worm and Cross Helical Gears 3.83
cast Iron grade 35. Determine the cone distance, average
module and face width of gears.
HERTZ METHOD
Solution
Given data
Power P 25 kW
Pinion speed N 1 1200 rpm
Wheel speed N 2 780 rpm
Z 1 30 teeth
i
N1
N2
1.54
Step 1
Selection of material
Material given is CI grade 35 (heat treated)
From P.S.G Data book, Pg.No. 8.5
[b] 800 kgf / c m2 80 N /mm2
[ c] 7500 kgf / c m2 750 N /mm2
From P.S.G Data book, Pg.No. 8.14
E 1.7 10 6 kgf/c m2 1.7 10 5 N/mm2
Step 2
Calculation of Design torque [M t]
From P.S.G Data book, Pg.No. 8.15
[M t] M t kd k
3.84
Design of Transmission Systems
But
M t 97420
kW
N1
97420
25
1200
2029.58 kg fcm
From P.S.G Data book, Pg.No. 8.15
kd k 1.3 assume
[M t] 2029.58 1.3
2638.45 kg fcm
263845 Nmm
Step 3
Calculate cone distance ‘R’
From P.S.G Data book, Pg.No. 8.13
R y
i 1
2
3
2
0.72
E [M t]
0.5 [ ]
i
c
y
From P.S.G Data book, Pg.No. 8.15
y
R
3 correspon ding to i 1 to 4
b
i 1.54
R3
1.54 1
2
89.54 mm
3
2
5
0.72
1.7 10 263845
3 0.5 [750]
1.54
Design of Bevel,Worm and Cross Helical Gears 3.85
Step 4
Calculation of transverse module “m t”
From P.S.G Data book, Pg.No. 8.38
R 0.5 m t Z 1
i2 1
89.54 0.5 m t 30
1.542 1
m t 3.25 mm
Take standard module m t 4 mm
(From P.S.G Data book, Pg.No. 8.21)
Step 5
Recalculate ‘R’ and calculate ‘b’
R 0.5 m t Z 1
i2 1
0.5 4 30
1.542 1
110.17 mm
But y
b
R
3 assumed
b
R 110.17
36.72 mm
3
3
Step 6
Calculation of load concentration factor ‘k’
From P.S.G Data book, Pg.No. 8.15, b
The average module
b
d 1av
3.86
Design of Transmission Systems
m av m t b
sin 1
Z1
we know that
tan 2 i
(i.e) tan 2 1.54
2 tan 1 1.54 57
1 90 57 33
m av 4
36.72 sin 33
30
3.33 mm
but
d1av Z 1 m av 30 3.33 100 mm
b
diav
36.72
0.3672
100
From P.S.G Data book, Pg.No. 8.15
k 1.6
Step 7
Calculate pitch line velocity v
From P.S.G Data book, Pg.No. 8.3
v
d 1av N 1
60 1000
100 1200
6.283 m/s
60 1000
Step 8
Calculate the value of k d
Design of Bevel,Worm and Cross Helical Gears 3.87
From P.S.G Data book, Pg.No. 8.16
kd 1.4 for v up to 8 m/s
Step 9
Recalculate design twisting moment
[M t] Mt kd k
2029.58 1.4 16
4546.25 kgfcm
454625 N mm
Step 10
Calculation of Induced bending stress b
From P.S.G Data book, Pg.No. 8.13 (A)
b
R
i2 1 [M t]
2
R 0.5b b m t yv
1
[ b]
cos
From P.S.G Data book, Pg.No. 8.18 take yv
corresponding to Z v
Zv
Z1
cos 1
30
30
35.77
cos 1 c o s 33
~
36 teeth
y v 0.4546 at value X 0, Z v 36
b
1.542 1 45462.5
110.17
2
110.17 0.5 36.72 86.72 4 0.4546
1
cos 20
91,967,564.61
173.89 N /mm 2 [ b] 80 N/mm 2
528,880.904
3.88
Design of Transmission Systems
Hence the design is not safe.
Therefore increase the value of transverse module
m t
Trail 1
Assume m t 5
Repeat the steps 5 to 10
Step 5
R 0.5 m t Z 1
i2 1 137.71 mm
b
R 137.71
45.90 mm
3
3
Step 6
m av mt b
sin 1
z1
5 45.90
sin 33
30
m av 4.166 mm
but
d1av Z1 m av
30 4.166 120 mm
b
45.90
0.375
d1av
120
From P.S.G Data book, Pg.No. 8.15
k 1.6
Design of Bevel,Worm and Cross Helical Gears 3.89
Step 7
v
d1av N 1
60 1000
120 1200
60 1000
7.539 m/s
Step 8
kd 1.4 for v upto 8 m/s
Step 9
[M t] M t kd k
2029.58 1.4 1.6
4546.25 kg fcm
454625 Nmm
Step 10
b
i2 1 [M t]
R
2
R 0.5 b b mt yv
1
cos
137.71
1.54 2 1 454625
2
137.71 0.5 45.9 45.9 5 0.4546
b 89.03 N/mm2 [ b] 80 N/mm 2
The design is not safe
Trail 2
Assume m t 6
Repeat the steps 5 to 10
Step 5
R 0.5 m t Z 1
i2 1
1
cos 20
3.90
Design of Transmission Systems
0.5 6 30
1.54 2 1
165.25 mm
b
R 165.25
55.08 mm
3
3
Step 6
m av mt b
6 55.08
sin 1
Z1
sin 33
30
5 mm
but
d 1av Z 1 m av 30 5
150 mm
b
55.08
0.3672
d 1av
150
k 1.6 From P.S.G Data book, Pg.No. 8.15
Step 7
v
d 1av N 1
60 1000
150 1200
9.42 m/s
60 1000
Step 8
From P.S.G Data book, Pg.No. 8.16
kd 1.4 for v upto 12 m/s
Design of Bevel,Worm and Cross Helical Gears 3.91
Step 9
[M t] M t kd k
2029.58 1.4 1.6
4546.25 kg fcm
454625 Nmm
Step 10
b
i2 1 [M t]
R
2
R 0.56 b m t yv
1
cos
165.25
1.54 2 1 454625
2
165.25 0.5 55.08 55.08 6 0.4546
1
cos 20
51.52 N/mm2 [b] 80 N/mm2
Hence design is safe.
Step 11
Calculation of surface compressive stress
From P.S.G Data book, Pg.No. 8.13
0.72
c
R 0.5 b
0.72
165.25 0.5 55.08
i2 1
3
ib
E [M t]
3
1.542 1
1.7 10 5 454625
1.54 55.08
392.67 N/mm2 750 N/mm 2
since c [ c] the design is safe.
3.92
Design of Transmission Systems
Problem 3.8 Design a bevel gear to transmit a power of 9
kW at 200 rpm of the pinion. Gear Ratio is 3, material used
is C20. Ultimate tensile strength u is 500 N/mm2, Yield
strength y is 260 N/mm2
(May/June 2013)
HERTZ METHOD
Given data:
Power 9 kW 9 10 3 W
Pinion speed N 1 200 rpm
Gear ratio
i3
Material used
Pinion-Gear C20
Ultimate strength u 500 N/mm 2
Yield strength
y 260 N/mm 2
Step 1: Selection of Material
Material for pinion and gear - C20 (Given) Refer
PSG Data book Pg No.8.4. Since the pinion and gear are
made up of same material, design pinion as it is weaker
than gear.
Step 2: Calculate equivalent Young’s Modulus
From PSG Data book Pg.No. 8.14 table 9
Select
E eq 2.15 10 6 kg f/c m2
E eq 2.15 10 5 N/mm 2
Design of Bevel,Worm and Cross Helical Gears 3.93
Step 3:
Assume life 10000 hrs
N 10000 60 200
N 12 10 7 cycles
Step 4: Calculation of design bending stress[b]
From PSG Data book Pg. No. 8.18
[b]
1.4 kbl 1
n k
From PSG Data book Pg. No.8.20 table 22
(consider core hardness)
kbl 1
1 Endurance limit stress in bending for complete
reversal stress in kgf/cm 2
From PSG Data book Pg No.8.19 table 19
1 0.22 u y 500
(For cast steel)
0.22 500 260 500 N/mm2
667.2 N/mm 2
6672 kg f/cm 2
n Factor of safety
From PSG Data book Pg No. 8.19 table 20
n2
k Fillet stress concentration factor
3.94
Design of Transmission Systems
From PSG Data book Pg No. 8.19 table (21)
Take
0 x 0.1
addendum
modification
co-efficient
k 1.2
[b]
1.4 kbl 1
n k
1.4 1 6672
2 1.2
3892 kg f/c m2
[b] 389.2 N/mm2
Step 5:
Calculate design surface contact compressive stress [ c]
From PSG Data book Pg 8.16
[ c] C B HB kcl kg f/cm 2
Where
C B 20
HB 170 to 200
From PSG Data book Table 16 Pg. No.8.16
Take HB 170
kcl life factor
From PSG Data book Pg 8.17 table 17
kcl 1
as
Design of Bevel,Worm and Cross Helical Gears 3.95
[c] 20 170 1
3400 kgf/cm 2
[ c] 340 N/mm 2
Step 6: Calculation of design twisting moment [M t]
From PSG Data book Pg no. 8.15
Design twisting moment [M t] M t k d k
Where
M t Nominal twisting moment
Mt
97420 kW
N
Where
N S peed in rpm 200 rpm Given
kW n ominal power in kW 9 kW Given
Mt
97420 9
200
4383.9 kg f cm
k load correction facto r
k d dynamic load factor
From PSG Data book Pg No.81.5
k d k 1.3
[M t] M t kd k
4383.9 1.3
5699.07 kg f cm
3.96
Design of Transmission Systems
1 kgf cm 100 N mm
Step 7: Calculate cone distance ‘R ’
From PSG Data book Pg No.8.13 table (8)
R y
i2 1
y
3
2
0.72
E [M t]
cm
0.5 [ ]
i
c
y
R
From PSG Data book table 13 Pg no. 8.15
b
Take y 3 (based on i 3 Given)
E equivalent Young’s Module
R3
32 1
10
R3
3
2
6
0.72
2.15 10 5699.07
3 0.5 [3400]
3
7.1750 10 9 4.0843 10 9
3
R3
10 3.08304
R 29.24 cm
R 30 cm
R 300 mm
Step 8: Calculation of m t transverse module
From PSG Data book Pg No.8.38 table 31
R 0.5 mt Z 1
i2 1
Design of Bevel,Worm and Cross Helical Gears 3.97
Assume Z 1 20
mt
mt
mt
R
0.5 Z 1
i2 1
300
0.5 20
32 1
300
31.6227
m t 9.486 mm
Take standard module From PSG Data book Pg
no.8.2 table 1
Take m t 10 mm
Step 9: Calculate
b
d 1av
to find k
k load concentration factor
To find d 1
av
mm m t
b sin 1
Z1
From PSG Data book Pg No.8.38 table 31
b 0.3 R
0.3 300
90 mm
Z 1 20
3.98
Design of Transmission Systems
m m 10
90 sin 71.56
20
tan i
1 tan 1 i
5.73 mm
1 tan 1 3
d1
av
m m Z1
71.56
5.73 20
114.6 mm
Now calculate pitch line velocity v
v
v
d1 N 1
av
60 1000
m/sec
114.6 200
60 1000
v 1.2 m/sec
Calculate
b
d1
ratio
av
90
0.785
114.6
From PSG Data book table (14) Pg No.8.15. Take
the value of k
k 1.06
Step 10: Selection of IS
Quality
Corresponding to pitch line velocity v
Select the preferred quality
From PSG Data book Pg No.8.3 table 2
Select IS quality 10
Design of Bevel,Worm and Cross Helical Gears 3.99
Step 11: Read the value of dynamic load factor
kd
From, PSG Data book Pg No.8.16 table 15
The value of kd 1.1
Step 12: Recalculate [M t]-Design twisting moment
[M t] M t kd k
M t 4383.9 kg f cm from step 6
kd 1.1
k 1.06
[M t] 4383.9 1.1 1.06
[M t] 5111.6274 kgf cm
[M t] 511162.74 N mm
Step 13: Calculation of induced bending stress b
From PSG Data book Pg No.8.13 A table 8.
b
R
i 2 1 [ M t]
1
[b]
R 0.5 b b m t yv c o s
2
Where
R
Cone distance 30 cm
Pressure angle 20
i
Speed ratio 3
[M t] Design torque 5111.6274 kgf cm
b face width 9 c m
3.100
Design of Transmission Systems
m t transverse module 1 cm
yv form factor
Form factor is based on equivalent no of teeth on the
virtual cylinder Z v
Zv
Z1
cos 1
20
c o s 71.56
Z v 63.22
Read the value of yv corresponding to Z v From PSG
Data book Pg No.8.18 table 18 at x 0
y v 0.490
b
R
i2 1 [M t]
1
R 0.5 b b m t yv cos
2
30
32 1 5111.6274
2
30 0.5 9 9 1 0.490
1
c o s 20
484931.554
2694.664
b 175.95 kg f c m [ b] 3892 kg f cm
The design is safe based on beam strength.
Step
14: Calculate
induced
surface
contact
compressive stress (c)
From PSG Data book Pg No. 8.13 table (8)
Design of Bevel,Worm and Cross Helical Gears 3.101
i2 13
c
0.72
R 0.5b
c
0.72
30 0.5 9
ib
Eeq [M t] [c]
3 2 13
39
2.15 10 6 5111.6274
0.72
113453.25
25.5
3203.3 kgf c m
c 3203.3 [ c] 3400 kgf c m
The design is satisfactory.
Problem 3.9 Design a pair of bevel gears to transmit 15 kW
at the pinion speed of 1600 rpm, and the gear ratio is 4.
Material for gears 15 Ni 2 Cr Mo 15 / steel. The tooth profiles
of the gears are of 20 composite form.
HERTZ METHOD
Solution:
Given data
P 15 kW 15 10 3 W
N 1 pinion 1600 rpm
Gear ratio
i 4
Pressure angle 20
Material used for pinion and gear 15 Ni 2 Cr Mo15/ steel
3.102
Design of Transmission Systems
Steel 1: Selection of Material
Material for pinion and gear
15 Ni 2 Cr Mo 15 /
steel
Refer PSG Data book Pg No.8.4
Since the pinion and gear are made up of same
material, design pinion as it is weaker than gear.
Step 2: Calcuatle Equivalent Young’s Modulus
From PSG Data book Pg No.8.14 table 9
select
E eq 2.15 10 6 kgf/cm 2
E eq 2.15 10 5 N/mm 2
Step 3:
Life is not given in the question, so Assume life
N 10000 hrs
N 10000 60 1600
96 10 7 cycl es
Step 4: Calculation of Design bending stress [b]
From PSG Data book Pg No.8.18
[b]
1.4 kbl 1
n k
From PSG Data book Pg No.8.20 table 22, take
the value of life factor for bending kbl
k bl 0.7
Design of Bevel,Worm and Cross Helical Gears 3.103
From PSG Data book Pg no.8.19 table 19
1 Endurance limit stress in bending for complete
reversal of stress.
For alloy steel
1 0.35 u 1200
Where
u Ultimate tensile stress
According to material of gear, take the value of u
From PSG Data book Pg No. 8.5 table 7 in kg f/cm 2
u 90
Take u 90 kg f/mm 2
9000 kg f/cm 2
1 0.35 9000 1200
4350 kg f/cm 2
n Factor of safety
From PSG Data book Pg 8.19 table 20
n 2.0
k Fillet stress concentration factor.
From PSG Data book Pg 8.19 table 21
(Take addendum modification co-efficient 0 X 0.1)
k 1.2
3.104
Design of Transmission Systems
[b]
[b]
1.4 kbl 1
n k
1.4 0.7 4350
2 1.2
[b] 1776.25 kg f/cm 2
[b] 177.625 N/mm 2
Step 5: Calculate design surface contact compressive
stress [c]
From PSG Data book Pg 8.16
[ c] C R HRC kcl kg f/cm2
From PSG Data book Pg 8.16 table 16
For Alloy steel case hardened.
C R 280
HRC 55
From PSG Data book Pg 8.17 table 17
K c1 0.585
[ c] 280 55 0.585
9009 kgf/cm 2
[ c] 900.9 N/mm 2
Step 6: Calculation of design twisting moment [M t]
From PSG Data book Pg No.8.15
Design of Bevel,Worm and Cross Helical Gears 3.105
Twisting moment [M t] M t k d k
Where
M t Nominal twisting mo ment
Mt
97420 kW
N
Where
N
Speed in rpm 1600 rpm
kW Nominal power in kW 15 kW
Mt
97420 15
1600
M t 913.3125 kg f c m
k
Load correction factor
kd
Dynamic load factor
From PSG Data book Pg No.8.15
k d k 1.3
[M t] m t kd k
[M t] 913.3125 1.3
[M t] 1187.306 kg f cm
[M t] 11873.06 N mn
STep 7: Calculate cone distance R
From PSG Data book Pg no.8.13 table 8
3.106
Design of Transmission Systems
R y
i2 1
y
3
2
0.72
E [M t]
cm
0.5 [ ]
i
c
y
R
From PSG Data book, table 13 Pg no.8.15
b
Take y 3 (based on i 4)
E Equivalent Youong’s Modulus (found in step 2)
R3
42 1
3
17
3
2
6
0.72
2.15 10 11873.06
3 0.5 9009
4
1.4193 10 9 6.3817 10 9
3
25.78 cm
R 26 cm
R 260 mm
Step 8: Calculation of m t transverse module
From PSG Data book Pg No.8.38 table 31
R 0.5 mt Z 1
i2 1
Assume Z 1 20
mt
R
2
i 1
0.5 Z1
260
0.5 20
42 1
M t 6.38 mm
Design of Bevel,Worm and Cross Helical Gears 3.107
Take standard module From PSG Data book Pg
No.8.2 table
Take M t 8 mm (Standard value)
Step 9: Calculate
b
d1
to find k
av
k load concentration facto r
To find d 1
av
m m mt
b sin 1
Z1
From PSG Data book Pg No.8.38 table 31
b 0.3 R
0.3 260
b 78 mm
Z 1 20
tan 1 i
1 tan 1 4
1 75.96
mm 8
78 sin 75.96
20
m m 4.21 mm
d1
av
m m Z1
4.21 20
3.108
Design of Transmission Systems
84.2 mm
Now calculate pitch line velocity v
v
v
d1 N 1
av
60 1000
m/sec
84.2 1600
60 1000
v 7.05 m/sec
Calculate
b
d1
ratio
av
78
0.92
84.2
From PSG Data book table (14) Pg No.8.15 Take
the value of k
k 1.1
Corresponding to
b
1.0
d1
av
Step 10: Selection of IS Quality
Corresponding to pitch line velocity v
Select the preferred quality.
From PSG Data book Pg No.8.3 table 2
Select IS quality 8 w.r.t to v 7.05 m/s
Step 11: Read the value of dynamic load factor
kd
From PSG Data book Pg No.8.16 table 15
The value of kd 1.4
Design of Bevel,Worm and Cross Helical Gears 3.109
Step 12: Recallcualte [M t] Design twisting moment
[M t] M t kd k
913.3125 1.4 1.1
1406.50125 kg f cm
140650.10 N mm
Step 13: Calculation of induced bending stress b
From PSG Data book Pg No.8.13A table 8
b
R
i2 1
[Mt]
1
[b]
R 0.5b b m t yv cos
2
where
R
Cone distance 26 cm
Pressure angle 20
i
Speed ratio 4
Mt
Design torque 1406.50 kg f c m
b
Face width 7.8 c m
Mt
Transverse module 0.8 cm
yv
Form factor
From factor is based on equivalent no of teeth on
virtual cylinder Z v
Zv
Zv
Z1
cos 1
20
cos 75.96
Z v 82.44
Read the value of yv corresponding to Z v
3.110
Design of Transmission Systems
From PSG Data book Pg No.8.18 table 18 at x 0
y v 0.499
b
R
i 2 1 [ M t]
1
R 0.5b b mt yv cos
2
26
4 2 1 1406.50
1
c
o
s
20
26 0.5 7.8 7.8 0.8 0.499
150777.8496
1429.07
2
b 105.507 kg f/cm 2
b 105.507 [b] 1776.25 k gf /cm 2
The design is satisfactory based on beam strength.
Step
14:
Calculate
induced
surface
contact
compressive stress c
From PSG Data book Pg No.8.13 table (8)
c
0.72
R 0.5b
i2 13
0.72
26 0.5 7.8
ib
E eq [M t] [t]
42 13
4 7.8
2.15 10 6 1406.50125
0.72
82423.05 2685.27 kg f/cm 2
22.1
c 2685.27 kg f/cm 2 [ c] 9009 kg f/c m2
The design is satisfactory.
Design of Bevel,Worm and Cross Helical Gears 3.111
Problem 3.10 Design a bevel gear drive to transmit 3.5 kW
with the following specifications: speed ratio 4; driving shaft
speed 200 rpm; drive is non reversible, material for pinion
is steel; material for wheel is cast iron; and life 25,000 hours.
HERTZ METHOD
Solution
Step 1
Selection of material (From P.S.G. Data book,
Pg.No. 1.12)
Pinion: C 45, surface hardened to 45 RC and core
hardness 350 BHN
u 700 N/mm2; y 360 N/mm 2
Wheel: CI grade 30; u 300 N/mm2
Step 2
calculation of design stresses
[c]pinion C R HRC kcl (From P.S.G. Data book, Pg.
No. 8.16)
C R 23; HRC 45
for life 25,000 hrs
N 25000 60 200
30 10 7 cycles
From P.S.G. Data book, Pg.No. 8.17
life factor for surface strength kcl 0.585
for HB 350 and N 25 10 7 cycles
[ c]pinion 23 45 0.585 605.5 N/mm 2
3.112
Design of Transmission Systems
[b]pinion
1.4 k bl
n k
1 (From P.S.G. Data book,
Pg. No. 8.18)
From P.S.G. Data book, Pg.No. 8.19
for forged steels,
1 0.25 u y 50
0.25 700 360 50
315 N/mm2
From P.S.G. Data book, Pg.No. 8.20
kbl for HB 350 and N 10 7 cycles
From P.S.G. Data book, Pg.No. 8.19
k for steel normalised, surface hardened
n 2.5 for steel, surface hardened
[b]pinion
1.4 1 315
2.5 1.5
117.6 N/mm2
[c]wheel C B H B k cl ( From P.S.G. Data book,
Pg. No. 8.16)
From P.S.G. Data book, Pg.No. 8.16, for CI, Grade 30
C B 2.3; HB 220 assumed
we know that
N wheel
30 10 7 30 10 7
7.5 10 7 cycles
i
4
Design of Bevel,Worm and Cross Helical Gears 3.113
From P.S.G. Data book, Pg.No. 8.17; for CI
kcl
6
10 7
N wheel
10 7
6
7.5 10 7
0.714
[c]wheel 2.3 220 0.714 361.3 N/mm 2
[ b]wheel
1.4 k cl
n ka
1
From P.S.G. Data book, Pg.No. 8.19; for CI
1 0.45 u
0.45 300
135 N/mm 2
From P.S.G. Data book, Pg.No. 8.20, for CI
kbl
9
10 7
N wheel
9
10 7
7.5 10 7
0.799
From P.S.G. Data book, Pg.No. 8.19, for CI, No
heat treatment
Design of Transmission Systems
3.114
n 2.5
k 1.2
[b]wheel
1.4 0.799
135 5.03 N/mm2
2.5 1.2
Step 3
Determination of R (Design of pinion)
From P.S.G. Data book, Pg.No. 8.13
R y
i 1
2
3
0.72
0.5 [ ]
c
y
2
E [Mt]
i
i 4 given
E eq 1.7 10 5 N/mm 2 (From P.S.G. Data book, Pg.
No. 8.14)
y 3 Assume (From P.S.G. Data book, Pg. No
8.15)
[M t] k o k k d M t
k o 1 assumed
k kd 1.3 assume From P.S.G. Data bo ok, Pg. No. 8.15
From P.S.G. Data book, Pg. No. 8.15
M t 97420
kW
N
97420
3.5
200
1704.85 kg fcm
Design of Bevel,Worm and Cross Helical Gears 3.115
170.48 Nm
[M t] 1 1.3 170.48
221.63 Nm
3
R
16 1
3
2
5
0.72
1.7 10 221.63 10
3 0.5 605.5
4
3
159.17 mm
Step 4
Determination of m t
R 0.5 m t
i2 1 Z1 (From P.S.G. Data book, Pg.
No. 8.38)
159.17 0.5 m t
16 1 18 assume Z1 18
mt 4.28 mm
Take m t 5 (standard)
Step 5
Recalculate R and find b
R 0.5 5
16 1 18
185.54 mm
b
R 185.54
61.8 mm
3
3
Step 6
Calculate m av , d 1av and pitch line velocity,
From P.S.G. Data book, Pg.No. 8.15
3.116
Design of Transmission Systems
R 0.5 b
m av m t
R
185.54 0.5 61.8
5
185.54
4.17 mm
d1av Z 1 m av
18 4.17 75 mm
Pitch line velocity, v
d 1av N 1
60 1000
(from P.S.G. Data
book, Pg. No. 8.15)
v
75 200
0.8 m/s
60 1000
Step 7
Revise k, kd and [M t]
Since
61.8
b
0.824
d1av
75
From P.S.G. Data book, Pg.No. 8.15, for
b
d1av
1
and surface hardness is less than 350 BHN for wheel
k 1.1
From P.S.G. Data book, Pg.No. 8.16, for class 6
gear, v 1 m/s
kd 1
[M t] 1 1.1 1 170.48
187.53 Nm
Design of Bevel,Worm and Cross Helical Gears 3.117
Step 8
Calculation of Induced stresses
(i) Stresses in pinion (From P.S.G. Data book, Pg.
No. 8.13)
i2 13
0.72
E [M t]
c
ib
R 0.5 b
1/2
1/ 2
42 13
0.72
3
1.7 10 187.5 10
185.54 0.5 61.8 4 61.8
442.67 N/mm2 [ c] 605.5 N /mm2
From P.S.G. Data book, Pg.No. 8.13 A
b
i2 1
0.7 R
R 0.5 b2 b m t yv
[M t]
From P.S.G. Data book, Pg.No. 8.39
tan 2 i 4
2 tan 1 4 76
1 90 76 14
From P.S.G. Data book, Pg.No. 8.39
Zv
Z1
cos 1
18
19
cos 14
yv 0.383 (from Pg. No. 8.18)
b
0.7 185.54
16 1 187.53 10 3
185.54 0.5 61.82 61.8 5 0.383
3.118
Design of Transmission Systems
35.48 N/mm 2 [b] 117.6 N/mm 2
(ii) Check for stresses in the wheel
c
wheel
c
pinion
442.67 N/mm 2 [c]wheel 361.3 N/mm 2
Wheel does not have adequate wear strength.
Using following relation to calculate the induced bending
stress
b wheel ywheel b pinion ypinion
where
ywheel is the form factor for the virtual number of
teeth of the wheel
we know that
Z 2 i Z 1 4 18 72
But Zv
Z2
cos 2
From P.S.G. Data book, Pg.No. 8.39
72
297.6 ~
300
c o s 76
From P.S.G. Data book, Pg.No. 8.18
yv 0.521 correspondin g to Z v 300 teeth
wheel 0.521 35.48 0.383
wheel 26.08 N/mm 2 [ b]wheel 50.3 N/mm 2
Hence design of pinion and wheel is satisfactory
Design of Bevel,Worm and Cross Helical Gears 3.119
Problem 3.11 A 90 degree straight bevel gear set is needed
to give a 3:1 reduction. Determine the pitch cone angle, pitch
diameter and gear forces if the 25 pressure angle, pinion has
15 teeth of pitch circle diameter 4 and the transmitted power
is 8 HP at 550 pinion rpm.
HERTZ METHOD
Solution
i 3, 25, Z1 15 teeth, P 8 HP 5.888 kW
Assume the material for pinion and gear C45 surface
hardened.
Since C45
350 BHN
hardened
to
55
RC,
core
hardness
u 720 N/mm2, y 360 N/mm 2
Assume life as 10,000 hrs
10,000 60 550 33 10 7 cycles
Design compressive contact stress
(From P.S.G. Data book, Pg.No. 8.16)
[c] C R HRC kcl
23 55 0.585
740 N/mm2
since CR 23 ; HRC 55 ; kcl 0.585
Design bending stress (From P.S.G. Data book,
Pg.No. 8.18)
[b]
1.4 kbl
n k
1
3.120
Design of Transmission Systems
But
1 0.25 u y 50 From PSG Data bookPg. No. 8.19
0.25 720 360 50
320 N/mm2
since k bl 1, n 2.5, k 1.5
[ b ]
1.4 1 320
2.5 1.5
119.5 N/mm2
Cone Distance ‘R’ (From P.S.G. Data book, Pg.No.
8.13)
R y
i2 1
Assume y
3
2
0.72
E [M t]
0.5 [ ]
i
c
y
R
3 (From P.S.G. Data book, Pg.No.
b
8.15)
i3
[M t] k o k k d M t from P.S.G. Data book, P g. No. 8.15
ko 1 assumed
k k d 1.3 assumed
Mt
5.888 10 3 60
102.229 Nm
2 550
[M t] 1 1.3 102.229 132.89 Nm
Design of Bevel,Worm and Cross Helical Gears 3.121
E 2.1 10 5 N/mm2 assumed
R
3
3
2
3 1
2
5
0.72
2.1 10 132.89 10
3 0.5 [740]
3
3
106.355 mm
i2 1
But R 0.5 m t Z 1
10
106.355 0.5 m t 15
m t 4.48 5 mm standard
from P.S.G. Data book, Pg.No. 8.2
R 0.5 5 15
10
118.58 mm
b
R 118.58
39.528 mm
3
3
But
m av mt
b sin 1
Z1
(From PSG Data book Pg.No. 8.38)
tan 2 i 3
2 tan 1 3 71.5
1 90 71.5 18.5
m av 5
39.528 sin 18.5
4.16 mm
15
v pitch lin e velocity
d1av N 1
60 1000
m/s
Design of Transmission Systems
3.122
But d1av Z 1 m av 15 4.16 62.45 mm
v
62.45 550
1.79 m/s
60 1000
IS Quality 6 bevel gear is assumed
k 1.6 for b/d1av 0.64 from P.S.G. Data book, Pg.No. 8.15
k 1.4
[M t] ko k kd mt 1 1.6 1.4 102.229 10 3
228.99 10 3 Nmm
(From P.S.G. Data book, Pg.No. 8.13)
1
i2 13
2
0.72
E [M t]
c
ib
R 0.5 b
0.72
118.58 0.5 39.528
1
3
2
32 1
5
3
2.1 10 132.89 10
3 39.528
628.55 N/mm 2 [c] 740 N/mm2
i 1 [M t]
R
2
b
2
R 0.5 b b mt yv
Z v Z eq
Z1
cos 1
from P.S.G. Data book, Pg.No. 8.13
15
15.81 16
cos 18.5
Y v 0.355 From PSG Data book Pg.No. 8.18
corresponding to 2 V
Design of Bevel,Worm and Cross Helical Gears 3.123
b
118.58
3 2 1 228.99 10 3
118.58 0.5 39.528 2 39.528 5 0.355
118.22 [ b] 119.5 N/mm2
Now the design is satisfactory
The pitch cone angle 1 18.5
Pitch Circle
d1 Z1 m t
Diameter
(PCD)
(outside)
of
75 mm
PCD (outside) of gear d2 Z 2 m t
Z2
Z1
i3
Z 2 3 15 45
d 2 Z 2 m t 25 mm
PCD (average) of pinion d1av Z 1 m av
15 4.16
62.4 mm
PCD (average) of gear d 2av Z 2 m av
45 4.16
187.2 mm
Gear forces
Tangential force F t
2 Mt
d1av
2 102.229 10 3
62.4
3276.5 N
pinion
3.124
Design of Transmission Systems
Radial force F r F t tan cos
3276.5 tan 25 cos 18.5
1448.93 N
Axial force F a Ft tan sin
484.796 N
Problem 3.12 Design a pair of bevel gears for two shafts
whose axis are at right angles the power transmitted is 25 kW.
The speed of the pinion is 300 rpm and the gear is rotating
at 120 rpm. Take material used as C45 for both pinion and
gear.
HERTZ METHOD
Given data
Power transmitted P 25 kW
N 1 Pinion speed 300 rpm
N 2 Gear speed 120 rpm
Material used
pinion
C45
gear
w.k.t
i
N1
N2
300
1.5
120
Solution:
1. Selection of Material
Refer PSG Data book Pg No.1.12
Design of Bevel,Worm and Cross Helical Gears 3.125
Given
C45, surface hardened to 45 RC and core hardness ~
350 BHN for pinion and wheel
v 700 N /mm2 ; y 360 N/mm 2
Since the material used for pinion of gear are same
design only pinion as it is weaker than gear.
Step 2: Calculate Equivalent Young’s Modulus
From PSG Data book Pg in 8.14 table 9
Select
E eq 2.15 10 6 kg f/cm 2
E eq 2.15 10 5 N/mm 2
Step 3: Life is not given in the question, so
Assume N 10000 hrs
N 10000 60 300
18 10 7 cycles
Step 4: Calculation of design bending stress [b]
From PSG Data book Pg no 8.18
[b]
1.4 kbl 1
nk
From PSG Data book Pg no.8.20 table 22 take
the value of life factor for bending kbl
kbl 1
3.126
Design of Transmission Systems
From PSG data book Pg 8.19 table 19
1 Endurance limit stress in bending for complete
reversal of stress
1 0.22 u y 500
1 0.22 700 360 500
1 733.2 N/mm 2
1 7332 kg f/cm 2
n factor of safety
From PSG Data book Pg 8.19 table 20
n 2.0
k Fillet stress concentration factor
From PSG Data book Pg 8.19 table 21
Take addendum modification co-efficient 0 0.1
k 1.2
[b]
1.4 kbl 1
n k
1.4 1 7332
2 1.2
[y] 4277 kgf/cm 2
[b] 427.7 N/mm 2
Design of Bevel,Worm and Cross Helical Gears 3.127
Step 5: Calculate design surface contact compressive
stress [c]
From PSG Data book Pg No.8.16
c C R HRc kcl kg f/cm2
C R 230
HR c 45
life factor kcl from PSG Data book Pg No.8.17
table 17
kcl 0.585
[c] 230 45 0.585 kg f/cm 2
6054.75 kgf/cm 2
[ c] 605.47 N/mm2
Step 6: Calculation of design twisting moment [M t]
From PSG Data book Pg No.8.15
Design twisting moment [M t] M tk dk
Where
M t Nominal twisting moment
Mt
97420 kW
N
3.128
Design of Transmission Systems
where
N
Speed in rpm 300 rpm.
kW
Nominal power in kW 25 kW
Mt
97420 25
300
8118.33 kg f cm
kd
dynamic load factor
k
load concentration factor
From PSG Data book Pg No.8.15
k d k 1.3
[M t] M t kd k
[M t] 8118.33 1.3
[M t] 10553.829 kg f cm
[M t] 1055382.9 N mm
Step 7: Calculate cone distance ‘R ’
From PSG Data book Pg No.8.13 table (8)
R y
i2 1
y
2
0.72
E [M t ]
cm
0.5 [ ]
i
c
y
3
R
From PSG Data book table 13 Pg no 8.15
b
Take y 3 (base on i 1.5
E equivalent Young’s Module
Design of Bevel,Worm and Cross Helical Gears 3.129
R3
1.52 1
3
2
6
0.72
2.15 10 10553.829
3 0.5 6054.75
1.5
R 5.408
34.2254
R 5.408 5.850
R 31.63
R 32 cm
R 320 mm
Step 8: Calculation of m t transverse module
From PSG Data book Pg No.8.38 table 31
R 0.5 m t Z 1
i2 1
Assume Z 1 20
mt
mt
R
i2 1
0.5 Z 1
320
1.52 1
0.5 20
m t 17.75 mm
Take standard module From PSG Data book Pg
no.8.2 table 1
Take m t 18 mm
3.130
Design of Transmission Systems
Step 9: Calculate
b
d1
to find k
av
k load concentration factor
To find d 1
av
mm m t
b sin 1
Z1
From PSG Data book Pg no.8.38 table 31
b 0.3 R
b 0.3 320
96 mm
Z 1 20
tan 1 i
1 tan 1 1.5
1 56.30
m m 18
96 sin 56.30
20
14.006 mm ~
14 mm
d1
av
mm Z1
14 20
280 mm
Now calculate pitch line velocity v
Design of Bevel,Worm and Cross Helical Gears 3.131
v
d1 N1
av
60 1000
m/s ec
280 300
60 1000
v 4.398 m/sec
Calculate
b
d1
av
ratio
96
0.342
280
From PSG Data book table (14) Pg No.8.15
Take the value of k
k1
Step 10: Selection of IS quality
Corresponding to pitch line velocity v
Select the preferred quality
From PSG Data book Pg No.8.3 table 2
Select IS quality 10
Step 11: Read the value of dynamic load factor
kd
From PSG Data book Pg No. 8.16 table 15
The value of kd 1.1
Step 12: Recalculate [M t] Design twisting moment
[M t] M t k d k
M t 10533.829 kg f cm
3.132
Design of Transmission Systems
k d 1.1
k1
[M t] 10533.839 1.1 1
[M t] 11587.2119 kg f cm
[M t] 1158721.19 N mm
Step 13: Calculation of induced bending stress
From PSG Data book Pg No. 8.13 A table 8
b
R
i2 1 [M t]
1
[b]
R 0.5b b m t yv cos
2
where
R
Cone distance 32 cm
Pressure angle 20 (Assume).
i
Speed ratio 1.5
[M t]
Design torque 11587.2119 kgf cm
b
Face width 9.6 cm
Mt
transverse module = 1.8 cm
yv
Form factor
Form factor is based on equivalent no of teeth on the
Z1
virtual cylinder Z v
cos 1
20
c o s 56.30
36.04
Design of Bevel,Worm and Cross Helical Gears 3.133
Read the value of yv corresponding to Z v
From PSG Data book Pg No.8.18 table 18 at
X 20
y v 0.458
b
R
i2 1 [M t]
1
[ b]
c
o
s
R 0.5b b m t y v
2
32
1.5 2 1 11587.2119
2
32 0.59.6 9.6 1.8 0.458
1
cos 20
668452.5863
1
5855.271
c o s 20
b 121.48
b 121.5 kgf cm [b] 4277 kg f c m
The design is satisfactory based on beam strength.
Step
14: Calculate
induced
surface
contact
compressive stress c
From PSG Data book Pg No. 8.13 table (8)
i2 1 3
c
0.72
R 0.5b
c
0.72
32 0.5 9.6
ib
Eeq [M t] [ c]
1.52 13
1.5 9.6
2.15 10 6 11587.2119
3.134
Design of Transmission Systems
0.72
100679.2518
27.2
c 2665.039 kg f c m
c 2665.039 kg f c m [c] 6054.75 kg f cm
The design is satisfactory.
Problem 3.13 Design a bevel - gear drive to transmit 7.5 kW.
at 1440 rpm. Gear ratio is 3; pinion and gear are made of
C45 steel; Life of gears 10,000 hrs.
(Apr./May 2009)
HERTZ METHOD
Given Data:
Power P 7.5 kW
Pinion speed N 1 1440 rpm
i
Z2
Z1
3
Gear ratio i 3
Life N 10,000 hrs
Life N 10,000 60 1440 86.4 107 cycles
Step 1
Selection of Material: From PSG Data book P.No.
8.16; table (16) Material Given C45
Pinion and wheel are made of same material.
Therefore, design only pinion
Assume surface hardened heat treatment
C45 surface hardened
HRC 40 to 55
Assume HRC 50
Design of Bevel,Worm and Cross Helical Gears 3.135
i.e, surface hardness > 350 BHN
core hardness < 350 BHN
Step 2
Life of gears. (N)
N 10,000 hrs
10,000 60 1440
Life
N 86.4 10 7 Cycles
of Gears
Step 3
Equivalent Young’s modules ‘E’
From PSG Data book P.No. 8.14 table (9)
For steel pinion and steel wheel
E 2.15 10 6 kgf cm2
E 2.15 10 5 N mm2
Step 4
Calculation of design bending stress [b]
From PSG Data book P.No. 8.18 Design bending
1.4 kbl 1
stress b
n k
(Assume rotation in one direction only)
(From PSG Data book P.No. 8.20, table (22)
(consider core hardness) 350 BHS; N 10 7 cycles
3.136
Design of Transmission Systems
kbl
1
1 0.22 u y 500
kgf cm 2
(From PSG Data book P.No.8.19 table (19)
(Forged Steel) from PSG Data book pg no.1.9
for C45
63 71 kgf mm2
material u
and y 36 kgf mm2
take u 70 kgf mm2
36 100 kgf c m2
70 100 kgf cm2
From PSG Data book P.No.8.19 table (20)
1 0.25 70 100 36 100 500
3150 kg f c m2
[For forged and surface hardened]
n 2.5
k From PSG Data book table 21; P.No.8.19
(Steel - surface hardened - at 0 0.1
k 1.5
Design bending stress [b]
[ b]
1.4 1 3150
[Pg.No. 8.18] table.18
2.5 1.5
1176 kg f cm 2
[b] 117.6 N mm 2
Design of Bevel,Worm and Cross Helical Gears 3.137
Step 5
Calculation of Design surface contact compressive
stress [ c]
[c] C R HRC kCl kg f cm 2
From PSG Data book Table 16; P.No. 8.16
C R 230 for C45 surface hardened steel
HRC 50 assumed
HRC 50
k Cl From PSG Data book P.No.8.17; P.No.17
steel, N 25 10
Consider surface hardness which is 350 BHN
kcl 0.585
[ C ] 50 230 0.585 6727.5 kg f cm 2
[ c] 672.75 N mm2
Step 6
Calculation of Design torque [M t]
From PSG Data book P.No.8.15
Design twisting moment
[M t] M t k d k
M t 97420
kW
N1
kg f cm
7
3.138
Design of Transmission Systems
97420
7.5
1440
507.39 kg fcm
Assume initially, k kd 1.3 (for symmetric scheme)
[M t] 507.39 1.3
659.61 kg fcm
[M t] 659.61 100 Nmm
Step 7
Calculate Cone distance ‘R’
From
PSG Data book P.No. 8.13 and table (8)
R y
i2 1
y
2
0.72
E[M t]
0.5 [ ]
i
c
y
R
b
From PSG Data book table (13) P.No. 8.15
Assume y 3 (for i 1 to 4)
i Gear ratio 3
[c] 672.75 N mm 2
E 2.15 10 5 N mm 2
[M t] 659.61 100 N mm
Design of Bevel,Worm and Cross Helical Gears 3.139
3 1
R3
2
3
2
5
0.72
2.15 10 659.61 100
3 0.5 672.75
3
R 90.43 mm
Step 8
Calculation of m t transverse module.
From PSG Data book P.No. 8.38 table (31)
R 0.5 mt Z 1
i2 1
32 1
90.43 0.5 m t 20
assume Z 1 20 teeth
gea r ratio i 3
mt 2.859 mm
Represent transverse module in terms of standard
module
From PSG Data book P.No. 8.2 table (1)
m t 3mm;
take n earest higher value
Step 8 (a):
Recalculate (R) and Calculate (b)
R 0.5 m t Z 1
i2 1
3 2 1
0.5 3 20
R 94.86 mm
y
R
3
b
Revised
cone distance ‘R’
3.140
Design of Transmission Systems
b
R 94.86
31.62 mm
3
3
Face width b 31.62 mm
Step 9
To find k ; Calculate b d1 av
From PSG Data book P.g. No. 8.15 Table 14
k Load concentration factor
To find d 1 ;
av
Average (or)
Module
m av m t b
3
sin 1
Z1
31.62 sin 18.43
20
(or)
av
Z 1 m av
d1
20 2.5 50 mm
31.62
b
0.06324
50
d 1av
2 71.56
1 90 71.56
m av 2.5 mm
d1
tan 2 i 3
av
18.43
R 0.5 b
m tZ 1
R
94.86 0.5 31.62
3 20
94.86
50 mm
From PSG Data book table 14; P.No.(8.15)
The value of k 1.6
Step 10
Selection of IS Quality
Design of Bevel,Worm and Cross Helical Gears 3.141
From PSG Data book P.No. 8.3 table (2)
Calculate pitch line velocity v
v
d 1av N 1
60 1000
50 1440
60 1000
v 3.769 m/sec
According to velocity of straight bevel, Select IS
quality 6 steel;
Step 11
Read the value kd
From PSG Data book P.No. 8.16 Page No. (15)
kd 1.4 for IS quality (6) surface hardness 350 and
v upto 8 m/sec
Step 12
Recalculate [ M t ] - design twisting moment.
[ M t ] M t kd k
507.39 1.6 1.4
1136.55 kg fcm
[ M t ] 113655 Nmm
Step 13
Calculation of induced bending stress b,
From PSG Data book P.No. 8.13 table (8)
3.142
Design of Transmission Systems
b
R
i2 1 [ M t ]
1
[ b ]
cos
R 0.5b b m tyv
2
R 94.86 mm ; i 3
To find yv:
From PSG Data book
P.No. 8.18; Table (18)
[Mt] 113655 Nmm
Zv
b 31.62 mm ; m t 3 mm
Z1
cos 1
20
cos 18.43
21.08 21 teeth
Take average for 20 and 22 and take yv value at
X 0.
yv form factor 0.3955
pressure angle 20
Induced bending stress [ b]
b
R
i2 1 [ M t ]
1
[ b ]
c
o
s
R 0.5b b m t y v
2
32 1 113655
94.86
2
94.86 0.5 31.62 31.62 3 0.3955
1
cos 20
b 154.75 N/mm 2 [ b ] 117.6 N/mm 2
Design of pinion based on beam strength is not
satisfactory.
Therefore, increase the value of transverse module
m t i.e., Revise m t.
Design of Bevel,Worm and Cross Helical Gears 3.143
Trail 2
Assume transverse module m t 4 mm
Repeat steps 8 (a) to (13)
Step 8 (a)
R 0.5m t Z 1
i2 1
0.54 20
32 1
R 126.49 mm
b
R 126.49
42.16 mm
3
3
Step 9
m av m t b
sin 1
Z1
1 18.43
sin 18.43
4 42.16
20
m a v 3.33 mm
d1
av
Z1 mav
20 3.33 66.67 mm
b
d1
av
42.16
y
66.67
0.6323
From table (14); PSG Data book P.No. 8.15
k 1.6
3.144
Design of Transmission Systems
Step 10
v
d1 N1
av
60 1000
66.67 1440
60 1000
5.026 m/sec
Select IS quality (6) gear.
Step 11
kd 1.4
Step 12
[ M t ] Mt k d k
(Similar to previous step)
507.39 1.6 1.4
1136.55 kg fcm
[ M t ] 113655 Nmm
y v 0.3955
(Similar to previous step)
Step 13
b
R
i2 1 [ M t ]
1
c
o
s
R 0.5b b m t yv
2
126.49
3 2 1 113655
2
126.49 0.5 42.16 42.16 4 0.3955
b 65.28 N/mm 2 [ b ] 117.6 N/mm 2
1
c o s 20
Design of Bevel,Worm and Cross Helical Gears 3.145
Therefore, the design of pinion based on beam
strength is satisfactory.
Note: To avoid re-calculation from step 8(a) to 13, always
take module mt (standard) greater value i.e., instead of
selecting 3 mm, take 4 mm in the beginning itself.
Step 14
Calculation of induced surface contact compressive
stress c; ( Notes use only recalculated values)
0.72
c
R 0.5b
i2 13
ib
E[ M t ] [ c ]
R 126.49 mm ; b 42.16 m m ; i 3
E 2.15 10 5 N/mm 2 ; [ M t ] 113655 Nmm
0.72
c
126.49 0.5 42.16
2
3
3
1
3 42.16
2.15 105 113655
c 533.89 N /mm 2 [ c ] 672.75 N/mm 2
The design based on wear strength is satisfactory.
To Find Angles
From PSG Data book P.No. 8.39 Table (31)
[f o 1 ]
1. Addendum angle a
tan a tan a
1
2
m t fo
R
3.146
Design of Transmission Systems
41
a a tan 1
1
2
126.49
a a 1.81
1
2
2. Dedendum angle f
f f tan 1
1
2
tan 1
m t fo c
R
4 1 0.2
126.49
f f 2.17
1
2
3. Tip angle a 1 a
1
1
(Pinion)
18.43 1.81
a 20.24
1
4. Root angle f 1 f
1
1
(Pinion)
18.43 2.17
f 16.26
1
5. Tip dia. of pinion da mt Z 1 2 cos 1
1
420 2 c o s 18.43
da 87.58 mm
1
6. Tip dia. of wheel d a m tZ 2 2 c o s 2
2
420 2 c o s 71.57
Design of Bevel,Worm and Cross Helical Gears 3.147
da 82.52 mm
2
7. Pitch circle dia. (outside) of pinion d 1 m t Z 1
4 20
d1 80 mm
8. Pitch circle dia. (outside) of wheel (or) gear
d2 m t Z2
4 60
d2 240 mm
Problem
3.12 A pair of bevel gear is to be used to transmit
12 kW from a pinion rotating at 360 rpm to a gear mounted
on a shaft which intersect the pinion shafts at the angle of
70; Assuming the pinion is to have an outside pitch diameter
of 200 m.m, a pressure angle of 20; a face width of 40 mm:
and the gear shaft is to rotate at 120 rpm; Determine (a) the
pitch angle for the gear (b) the forces on the gear (c) the torque
produced about the shaft axis (d) Calculate dia. of pinion
shafts, if 45 N mm2 and if pinion shaft overhangs by
120 mm.
(Nov. 2007)
Given Data:
P 12 kW
P in ion s peed N 1 360 rpm
Angle between
70
two shafts
Pitch circle dia. of pinion
d 1 200 mm
Outside
3.148
Design of Transmission Systems
Pressure
20
angle
Face width
b 40 mm
Gear shaft speed 120 rpm
i
N1 360
N 2 120
3;
Assume Z 1 20 teeth
Z 2 No. of teeth
i Z 1 Z 1 no.of teeth on pinion
on Gear
Z 2 3 20 60 teeth
Let m t transverse module;
d1 m t Z1
mt
d1
Z1
200
10 mm
20
(which is equal to standard module)
i2 1
Cone distance R 0.5 m t Z 1
0.5 10 20
3 2 1
R 316.22 mm
Let 1 semi cone angle of pinion
2 semicone angle of w heel or Gear
1 2 70
tan 1
sin
i cos
Acute angle
Design of Bevel,Worm and Cross Helical Gears 3.149
tan 1
sin 70
3 cos 70
1 tan 1 0.2811
1 15.7
2 70 15.7
2 54.3.
Addendum Angle: a
tan a
m t f0
R
1
m t f0
Addendum angle of pinion a tan 1
1
R
10 1
tan 1
316.22
a 1 48 a
1
2
m t f0
Dedudum angle of pinion f tan 1
1
R
10 1
tan 1
316.22
f 210 f
1
Tip angle of pinion a 1 a
1
1
1542 1 48
a 17.5 17 30
1
2
3.150
Design of Transmission Systems
Tip angle of wheel a 2 a
2
2
54 18 148
a 566
2
Root angle
f 1 f
1
1
of pinion
1542 210
1332
Root angle
f 2 f
2
2
of pinion
5418 210
528
(b) The forces on the Gear
(a) Tangential force F tav
M t 97420
2 Mt
dav
2 Mt
b
d 1 1 0.5
R
kW
N1
97420
12
kg fcm 3247.33 kg fcm
360
Torque M t 324733 N mm
F tav
2 324733
40
200 1 0.5
316.22
Ftav 3.466 kN
3466.58 Newton
Design of Bevel,Worm and Cross Helical Gears 3.151
20
Radial force Fr F tav tan c o s 1
3.466 tan 20 c o s 1542
1 1542
1.2016 kN
Axial force F a F tav tan sin 1
3.466 tan20 sin 1542
Fa 0.3413 kN
(c) Torque produced about the shaft axis
Assume
over hang 120 mm
Fa and Fr induces BM;
Rm dav 2
M1 Fr overhang Fa Rm
R 0.56
dav mt Z1
R
1
1.214 120 0.3413 93.67
316.22 0.5 40
316.22
10 20
113.7 kNmm
187.35 mm
Rm 93.67 mm
FT induces also bending moment.
M 2 F t overhang
3.466 120 415.92 kN mm
3.152
Design of Transmission Systems
M21 M22
Re sultan t BM
113.7 2 415.92 2 431.18 kNmm
E quivalent
M2 T 2
Torq ue on Te
shaft
[T Mt 324733 N mm]
431.18 10 32 3247332 539785.75 N mm
Te
If 45N mm 2 for shaft material
Te
d3 539785.75 N mm
16 S
Shaft dia. d 39.38 mm
approx 40 mm
Pinion shaft diameter d 40 mm
Design of Bevel,Worm and Cross Helical Gears 3.153
3.12 DESIGN OF WORM AND WORM WHEEL
3.12.1 Introduction
When
the
shafts
are
non-parallel
and
non-intersecting, worm and worm wheel drive is used.
Worm drive can be treated as screw and nut pair. A
segment of nut is coiled to form a wheel. The thread of a
worm has trapezoidal profile in the axial direction.
Materials: Since the sliding occurs, the materials used
should have low coefficient of friction.
Worm: Worms are made of steel. The threads are grounded
and polished to reduce the surface roughness as low as
possible.
Worm wheel: Worm wheels are made of bronze and cast
iron.
LW
l
Pa
a
n
D W D OW
x
D OG
DT
DG
Rf
b
Fig.3 .6. W orm and W orm G ear
Rr
3.154
Design of Transmission Systems
3.13 TERMS USED IN WORM GEARING
1. Axial Pitch: Pa: It is the distance measured axially
(i.e, parallel to the axis of worm) from a point on one
thread to the corresponding point on the adjacent thread
on the work
P a mx
where m x axial module of the worm
2. Lead: It is the linear distance through which a point
on a thread moves ahead in one revolution of the worm.
Lead P a Z1
where, P a axial pitch
Z 1 numbe r of starts
If one turn of a worm
thread in unwound, it will
form an inclined plane
whose base will be equal to
the pitch circumference of
the worm and altitude equal
to lead of the worm, as
shown in Fig. 3.7.
LN
= P a Z1
3. Lead angle: : It is the angle between the tangent to
the thread helix on the pitch cylinder and the plane normal
to the axis of the worm.
Fig. 3.7
d 1
From the Fig. 3.7
tan
Lead of the Worm
Pitch circumference of the worm
Pa Z1 Pc Z1
l
d2
d1
d1
. .
. P a P c
Design of Bevel,Worm and Cross Helical Gears 3.155
tan
m x Z1
d1
mx Z 1
d1
The lead angle () may vary from 9 to 45. A lead
angle less than 9 results in rapid wear and the safe value
of is 12
1
2
Z 1 no. of starts on the w orm
Z 2 no. of teeth on the worm wh ee l
i gear ratio
Z2
Z1
m x axial m odule
d 1 Pitch circle diameter of worm
d 2 pitch circle diameter of worm wheel
q diam eter factor
d1
mx
a centre distance
Z1
lead angle tan 1
q
4. Tooth Pressure Angle: It is measured in a plane
containing the axis of the worm and equal to one half the
thread profile angle.
The pressure angle of 30 is recommended to obtain
a high efficiency and to permit overhauling, for automotive
applications.
3.156
Design of Transmission Systems
5. Normal Pitch: The distance measured along the normal
to the thread between two corresponding points on two
adjacent threads of the worm.
P N P a cos
P N Normal pitch
Normal diametrical pitch,
Pd
Z1
d 1 sin
Z2
d2 sin
PN
Note:
The reciprocal of the normal diametrical pitch is
known as Normal Module m n
mn
d1 sin d2 sin P N
1
Pd
Z1
Z2
Normal lead L N l cos
6. Helix Angle : It is the angle between the tangent to
the thread helix on the pitch cylinder and the axis of the
worm.
90
90
7. Velocity Ratio (i): The ratio of speed of the worm N
to the speed of the worm gear N 2 in rpm.
i
N1
N2
Z2
Z1
. . N1 Z2
.
N2 Z1
Design of Bevel,Worm and Cross Helical Gears 3.157
3.14 EFFICIENCY OF WORM GEARING
The ratio of work done by the worm gear to the work
done by the worm is known as efficiency of worm gearing.
It’s given by
tan cos tan
c o s tan
where,
Normal pressure angle
Co-efficient of friction
lead angle
The maximum efficiency, when
1 2
tan
For square threads, 0 and tan
tan
tan
Friction Angle
3.15 STRENGTH OF WORM GEAR TOOTH
The Lewis equation of beam strength
F s m x b [ b] y
F s m x b [ b ] Y
where
mx
–
Axial module
b
[b]
–
–
Face width
Allowable Static Stress
y
–
Form factor for worm wheel
y
Y
3.158
Design of Transmission Systems
3.16 DYNAMIC LOAD ON WORM GEAR TOOTH
6 vmg
Fd Ft
6
Where,
Ft
–
Tangential load
Fd
–
Dynamic load
vmg
–
Pitch line velocity of worm gear
3.17 WEAR STRENGTH OF WORM GEARS
F w d2 b kw
d2
–
Pitch diameter of worm wheel
b
–
Face width
kw
–
Wear Factor (or) load stress factor
3.18 THERMAL RATING OF WORM GEARING
The heat generated due to friction must be dissipated
in order to avoid over heating of the drive and lubricating
oil.
The quantity of heat generated (H g) is given by
H g P 1
P
–
Power in watts
–
Efficiency of worm gearing
The heat generated must be dissipated through the
lubricating oil to the gear box housing and then to the
atmosphere.
Design of Bevel,Worm and Cross Helical Gears 3.159
The heat dissipating capacity depends upon the
following factors.
1. Area of Housing (A); 2. Thermal conductivity of
material (K) and 3. Temperature difference between the
housing surface and 4, Surrounding air T 2 T 1
H d A T2 T1 K
Where
H d Heat dissipated
Hg Hd
P 1 A T2 T1 K
3.19 FORCES ACTING ON WORM GEARS
When the worm gear is transmitting power. The
forces acting on the worm are similar to power screw. The
force acting on the worm is shown in Fig. 3.8. The forces
on the worm and worm gear are equal in magnitude, but
opposite in direction.
W orm
G ea r
W orm
G ea r
W orm
G ea r
S h aft
+
FR
FR
FA
W orm
FT
W orm
S h aft
W orm
Fig.3.8. F orces A cting on W orm Teeth .
3.160
Design of Transmission Systems
1. Tangential force on the Worm
FT
2 Tw
d1
where,
Tw
–
Torque on worm.
d1
–
Pitch circle diameter of worm.
3.20 MERITS AND DEMERITS OF WORM GEAR DRIVES
3.20.1 Merits of Worm Gear Drives
1. It is used for very high velocity ratio of about 100.
2. Very smooth and noiseless operation.
3. Self locking facility is available.
4. It is very compact when compared with equivalent
spur or helical gears for the same speed reduction.
3.20.2 Demerits of Worm Gear Drives
1. Low Efficiency
2. More heat will be produced and hence this drive
can only be operated inside an oil reservoir (or)
an extra cooling fan is required in order to
dissipate the heat from the drive.
3. Low power transmission (up to 100 kW)
4. Cost is very high, when compared with other
gears drive.
Design of Bevel,Worm and Cross Helical Gears 3.161
3.21 BASIC DIMENSIONS OF WORM GEAR
From PSG data book pg.8.43 Table 35
Basic Dimensions of Worm Gear Pair
Nomenclature
Symbol
Formulae
Centre distance
a
a 0.5 mx q Z2 2x
Face width of wheel
b
From PSG Data book
table 38 Pg 8.48
Length of worm
L
From PSG Data book
table 39 Pg 8.48
Axial module
mx
Number of starts
Z
Determined by calculation
Number of teeth on wheel
Z2
Z2 iZ1
Gear ratio
i
Diameter factor
q
mx
i
q
2a
q Z2 2x
Z2
Z1
d1
mx
Height factor
fo
Normally fo 1
Axial pitch
Px
Px mx
Pitch of the helix, lead
Pz
Pz ZPx
Pressure Angle in axial
20
section
(Archimedian worm)
Lead angle on the
reference cylinder
Lead angle on the pitch
cylinder
tan
Z
q
tan
Z
q 2x
3.162
Design of Transmission Systems
Bottom clearance
c
c 0.2
to 0.3 mx
Addendum modification
x
x
coefficient
a
0.5 q Z2
mx
Worm Reference diameter
d1
d1 qmx
Worm Tip diameter
da1
da1 d1 2fomx
Worm Root diameter
df1
df1 d1 2fomx 2c
Worm Pitch diameter
d1
d1 mx q 2x
(In axial section)
Reference diameter
d2
d2 Z2mx
Worm wheel Tip diameter
da2
da2 Z2 2fo 2x mx
Worm wheel Root
df2
df2 Z2 2fo mx 2c
d2
d2 d2
WORM WHEEL
diameter
Worm wheel Pitch
diameter
Throat tip radius
R1
R1
d1
2
fomx
Worm wheel Throat root
radius
R2
Worm Tip relief radius
r1
r1 0.1 mx
Worm Root relief radius
r2
r2 0.2 mx
Worm Nominal tooth
thickness on reference
S
R2
d1
2
fomx c
mx
2
diameter in axial section.
Worm Nominal tooth
thickness on reference
diameter in normal section
Sn
Sn
m cos
2 x
Design of Bevel,Worm and Cross Helical Gears 3.163
Note: In PSG Data Book Z 2 is denoted by z & Z 1 by Z .
3.21.1 Forces on Worm: Refer PSG databook Page No. 8.57
1. Tangential force: F t
2M t
d2
2. Radial force: F r F t tan
3. Axial force: F a F t tan
M t twisting moment
pressure angle
friction angle
3.22 DESIGN OF WORM AND WORM GEAR USING
LEWIS AND BUCKINGHAM’S EQUATION
Step 1:
For a given problem note down the given parameters
like Power, gear ratio (i), speed, etc.
Step 2: Selection of Material
Refer PSG Data book Pg. No. 8.45
Selection of material is similar to spur gear and take
the vlaues of [c]. – Design surface stress and [ b] - Design
bending stress.
Step 3: Calculation of lead Angle
Diameter factor q
11
d1
mx
d1
mx
[If q is not given Assume q 11 ]
m x axial module
3.164
Design of Transmission Systems
Z1
Lead Angle tan 1
q
To determine Z 1 (no. of starts of gear); It is based on
the efficiency of worm gear drive. choose the appropriate
value From PSG data book pg. 8.46, Table 37.
Step 4:
Calculation of Tangential load Ft acting on the wheel in
terms of axial module mx
Tangential load F t
HP 75
vmg
vmg pitch line velocity of worm gear
vmg
d2 N2
d 2 in mm
60 1000
N 2 rpm
Power in HP
Step 5:
Calculation of Dynamic Load Fd
6 vmg
Fd
Ft
6
Step 6:
Calculation of strength of gear tooth
Fs
[b] y bP cn
[ b ] y b
P dn
P cn Normal circular pitch
P dn Normal Diametrical pitch
[b] yb mx
[b] Y b mx
Design of Bevel,Worm and Cross Helical Gears 3.165
Step 7:
Calculation of axial module mx
By equating F s F d ;
Determine the m x
Step 8:
Calculation of face width (b)
b 0.75 d 1 (If Z 1 2or 3 d1 11 m x
8.25 m x [From Data book Pg. 8.48, Table: 38]
b~
Step 9:
Calculation of pitch circle diameter d2
d2 Z2 m x
Step 10:
Calculation of pitch line velocity of worm wheel vgm
vgm
d 2N 2
d2 in mm
60 1000
N2 rpm
Step 11:
Recalculation of beam strength
F s [b] y b m x
Step 12:
Recalculation of Dynamic Load
6 vmg
Fd
Ft
6
3.166
Design of Transmission Systems
Step 13:
Checking for beam strength
F d F s for safe design.
Step 14:
Calculation of wear load Fw
F w d2 b kw
Step 15:
Checking for wear strength
F d F w For safe design.
Step 16:
Checking for efficiency
actual design then the design is safe.
tan
actual
tan
[From PSG Data book pg no. 8.49]
Friction Angle tan 1
If is not given Assume 0.03
co-efficient of friction.
Step 17:
Calculation the power loss (or) Heat Generated
H g 1 a Input hp 4500 kg f m/min
(Or)
a actual
Design of Bevel,Worm and Cross Helical Gears 3.167
H g 1 a P Watts
(power in Watts)
Step 18:
Calculate the area required to dissipate the heat
Heat generated Heat dissipated to the atmosphere
Heat Dissipated H d h cr A t kg f m/min
hcr
–
heat transfer co-efficient.
t
–
change in temperature T2 T1
A
–
Area required to dissipate the heat.
(Or)
substitute A in m 2, K in W/m 2
H d A T 2 T 1 K
H d in watts.
Step 19:
Calculate the basic dimensions of worm and worm wheel.
From the PSG Data book pg 8.43 table 35.
Step 20:
Draw the neat sketch of worm and worm wheel.
Problem 3.13 A hardened steel worm rotates at 1440 rpm
and transmits 12 kW to a phosphor bronze gear. The speed of
the worm wheel should be 60 3% rpm. Design the worm gear
drive if an efficiency of atleast 82% in desired, and also
determine the heat generated, required area of cooling to
dissipate the generates heat. Temperature rise restricted to
40C and heat transfer co-efficient 10 W/m2C
3.168
Design of Transmission Systems
Solution:
Step 1:
Given Data
Worm
N1 1440 rpm
Power
P 12 kW 12 10 3 W
Worm wheel
N 2 60 3% rpm
desired 82%
Material (Worm) - Hardened steel
Material (Worm wheel) - Phosphor bronze
Change in temperature t 40C
Heat transfer co-efficient, Hcr 10 W/m 2 C
Step 2:
Selection of Material
Worm - Hardened Steel
Worm Wheel - Phosphor bronze
Step 3:
Calculation of lead Angle
Diameter factor q
11
d1
mx
d1
mx
d1 11 mx
tan 1 Z/q
Z1
tan 1
11
[Assume q 11
If not given]
Design of Bevel,Worm and Cross Helical Gears 3.169
From PSG Data book Pg. 8.46 ; Table: 37
82% [ 0.80 to 0.92] Z1 3
tan 1 3 /11
15.25
Step 4:
Calculation of tangential load Ft
Ft
V mg
i
hp 75
V mg
[vmg worm gear velocity]
d2 N 2
60 1000
N1
N2
1440
3% i
60
Z2
i 24 0.72 ; i ~
24
vmg
m x 72 60
60 1000
3
P
12 10
hp
750
P 16 hp
Ft
hp 75
kg f
vmg
16 75
0.226 m x
d2 m x Z2
Z1
0.226 m x
i
Z 2 24 3
Z 2 72
3.170
Design of Transmission Systems
5309.73
53097.3
N
kg f
mx
mx
Step 5:
Calculation of Dynamic Load Fd
6 vmg
Fd
Ft
6
(Assume vmg 5 m/s)
6 5 53097.3
N
mx
6
97345.05
N
mx
Step 6:
Calculation of strength of gear tooth Fs
Y y
F s [b] y m x [ b] b Y m x
Y 0.392 Assu me 20
From PSG Data book Pg. No.8.52.
[b] 780 kgf/cm 2 78 N/mm 2
From PSG Data book pg. 8.45, Table 33. (For bronze,
rotation in only one direction)
b 0.75 d1 [From PSG Data book Pg.No.848 Table38]
0.75 11m x
8.25 m x
F s 78 8.25 m x 0.392 mx
F s 252.252 m 2x
Design of Bevel,Worm and Cross Helical Gears 3.171
Step 7:
Calculation of axial module (mx)
For safe design
Fs Fd
252.252 m 2x
97345.05
mx
m 3x 385.903
m x 7.28
8 mm
mx ~
From the PSG Data book pg. no.8.2, Table 1 (Choose the
largest standard module from table).
Step 8:
Calculation of face width (b)
b 8.25 m x
8.25 8
b 66 mm
Step 9:
Calculation of pitch axile diameter (d2)
d2 Z2 m x
72 8
576 mm
3.172
Design of Transmission Systems
Step 10:
Pitch line velocity of worm wheel V2
V 2 0.226 m x
V 2 1.808 m/min
Step 11:
Recalculation of Dynamic Load Fd
Fd
97345.05
N
mx
F d 12168.13125 N
Step 12:
Recalculation of Strength of Gear Tooth Fs
F s 252.252 m 2x
16144.128 N
Step 13:
Checking for Beam Strength Fs
F s F d for satis factory design
16144.128 12168.14
Fd FS
The design is safe, based on the beam strength.
Step 14:
Calculation of wear load Fw
Fw d2 b kw
d 2 576 mm
Design of Bevel,Worm and Cross Helical Gears 3.173
b 66 mm
k w 5.6 kg f/c m2 0.56 N/mm 2
[ 20, (Assume) Hardened steel & Bronze, From
PSG data book pg no. 8.54, Table 43]
Fw d2 b kw
576 66 0.56
F w 21288.96 N
Step 15:
Checking for Wear Strength
For satisfactory design
Fw Fd
F w 21288. 96 N ; Fd 12168.14
By comparing these values, F w F d, so the design is
safe based on wear strength.
Step 16:
Checking for efficiency
tan
actual
tan
tan 1
1.718
15.25
From PSG Data book Pg. 8.49 (Assume 0.03 )
3.174
Design of Transmission Systems
actual
tan
tan
tan 15.25
tan 15.25 1.718
0.27262
0.30512
0.8934 100
desired 82%
actual 89.34%
actual desired (for safe design)
So the design is safe, because the actual efficiency
is greater than desired efficiency.
89.3% 82%
Step 17: Calculate the power loss (or) Heat Generated
H g 1 a Input hp 4500 kg f/min
H g 1 0.893416 4500 kg f/min
7675.2 kg f/min
Step 18:
Calculate the area required to dissipate the Heat.
Heat
atmosphere.
generated
H d
Heat
dissipation
to
the
Design of Bevel,Worm and Cross Helical Gears 3.175
hcr 10 W/m2C
10
Nm
Sm 2C
Nm
6 kgfm/min
S
7675.2 kgf/min h cr t A
10 kgfm 60
60 10 m 2C min
1 w/m 2C 6 kg fm/minC
hcr 60 kgfm/min C
7675.2 kg fm/min 60
kg f m
min C m n
A 40
A 3.198 m2
Step 19:
Calculate the basic dimension of worm and worm wheel.
1. Axial module m x 8 mm
2. Number of starts (worm) Z 1 3
3. Number of teeth on the worm wheel Z 2 72
4. Face Width b 66 mm
5. Length of worm L 12.5 0.09 Z 2 m x
From PSG Data book pg. No. 8.48 Table 39
L [12.5 0.09 72 ] 8
151.84
152 mm
L~
6. Centre Distance (a)
3.176
Design of Transmission Systems
a 0.5 m x q Z 2x
0.5 8 11 72
332 mm
(Assume x 0)
7. Height Factor fo 1
8. Bottom Clearance
c 0.2 m x to 0.3 m x
[Take c 0.3 m x]
c 0.3 8
2.4 mm
9. Pitch Diameter
d1 mx q 2x
mx q
8 11
88 mm
d 2 Z 2m x
72 8
576 mm
10. Tip diameters da
d a1 d1 2fom x
88 2 1 8 104 mm
d a2 Z 2 2f0 2n m x
72 2 1 0 8
592 mm
11. Root Diameter df
n 0
Design of Bevel,Worm and Cross Helical Gears 3.177
df d 1 2fom x 2C
1
88 2 1 8 2 2.4
68 mm
67.2 ~
df Z 2 2fo m x 2C
2
72 2 1 8 2 2.4
56 mm
555.2 ~
Problem 3.14 Design a worm gear drive to transmit 12 kW
at 1200 rpm. Speed reduction desired is 30 : 1. The worm is
made of hardened steel and the wheel of phosphor bronze.
Check the heating capacity of gears and determine the
efficiency.
Solution:
Step 1:
Given Data
Power P 12 kW 12 10 3 W
WormN 1 1200 rpm
Speed ratio i 30
Worm - Hardened steel
Work wheel - phosphor bronze
To Find
Heating capacity of gears H g
Efficiency ( actual)
[May/June 2012]
3.178
Design of Transmission Systems
Step 2:
Selection of Material
Worm - Hardened steel
Worm wheel - Phosphor Bronze
Step 3:
Calculation of lead Angle
Diameter factor q
d1
mx
q 11(Assume
If not given)
11
d1
mx
d 1 11 m x
tan 1
Z1
q
(Assume Z 1 3
if not given).
1
tan
3/11
15.25
Step 4:
Calculation of tangential load Ft
Power
Ft
hp 75
kg f
V mg
P
12 10 3
hp
750
16 hp
Design of Bevel,Worm and Cross Helical Gears 3.179
vmg
Ft
d2 N2
d2 m x Z2
60 1000
Z2
90 mx 40
Z1
60 1000
Z 2 30 3
0.18849 m x
Z 2 90
hp 75
vmg
d2 90 m x
N1
N2
16 75
0.18849 m x
Ft
i
30
N2
6366.385
653663.85
kgf
N
mx
mn
1200
30
N 2 40 rpm
Step 5:
Calculation of Dynamic Load Fd
6 vmg
Fd
Ft
6
Fd
(Assume vmg 5 m/s
6 5 63663.85
6
mx
116717.05
mx
Step 6:
Calculation of strength of gear tooth Fs
F s [ b] b Y m x
[n] 780 kg f/cm 2 78 N/mm 2
3.180
Design of Transmission Systems
[From PSG Data book pg. No.8.45. Table 33.] For
bronze rotation in one direction only
b 0.74d1 Z 1 3 ;
From PSG Data book pg No. 8.48;
Table 38]
b 0.75 11 m x
Y 0.392 20)
(Assume) From PSG data book pg.No.8.52]
b 8.25 m x
F s 78 8.25 m x 0.92 m x
F s 252.252 m 2x
Step 7:
Calculation of axial module mx
For safe design
Fs Fd
252.252 m 2x
116717.05
mx
m 3x
116717.05
252.252
462.700
m x 7.73
m x~
8 mm
From PSG Data book pg no.8.2, Table 1 the standard
module in chosen mx 8 mm
Design of Bevel,Worm and Cross Helical Gears 3.181
Step 8:
Calculation of face width (b)
b 8.25 m x
8.25 8
b 66 mm
Step 9:
Calculation of pitch circle diameter d 2
d2 Z2 m x
90 8
d 2 720 mm
Step 10:
Pitch line velocity of worm wheel V2
V 2 0.18849 m x
0.18849 8 60
90.5 m/min
Step 11:
Recalculation of dynamic load Fd
Fd
116717.05 116717.05
mx
8
F d 14589.63 N
Step 12:
Recalculation of strength of gear tooth Fs
F s 252.252 m 2x
16144.128 N
3.182
Design of Transmission Systems
Step 13:
Checking for Beam Strength
For satisfactory design,
Fs Fd
16144.128 14589.63
The design is safe based on the strength of gear.
Step 14:
Calculation of Wear Load (Fw
F w d2 b kw
d2 720 mm ; b 66
kw 5.6 kg f/cm 2 0.56 N/mm2
[Hardened steel Bronze, from psg Data book pg. 8.54,
Table 43]
Fw d2 b kw
720 66 0.56
26611.2 N
Step 15:
Checking for Wear strength
For satisfactory design
Fw Fd
26611.2 F w 14589.63 F d
The design is safe based on the wear strength of
gear.
Design of Bevel,Worm and Cross Helical Gears 3.183
Step 16:
Efficiency actual
tan
tan
tan 1
0.03 (Assume)
1.718
15.25
actual
tan 15.25
tan 15.25 1.718
actual 0.8935 100%
89.35%
Step 17:
Heating capacity of great (H g ) (or) power loss (or)
Heat generated.
H g 1 a Inpu t hp 4500 kg f m/min
1 0.8935 16 4500 kgfm/min
7668 kg f m/min
7668
Nm /s
6
H g 1278 Watts
1 kgfm 1 Nm
6 s
mi n
. . 1 Nm
W
.
s
Step 18:
Calculate the basic dimensions of worm and worm
wheel.
1. Axial module m x 8 mm
3.184
Design of Transmission Systems
2. Number of starts (worm) Z1 3
3. Number of teeth on the worm wheel Z 2 90
4. Face Width b 66 mm
5. Length of Worm L 12.5 0.09 Z2 m x
Choose L From PSG Data book pg. No. 8.48,
Table 39
L 12.5 0.09 90 8
164.8
L~
165 mm
6. Centre Distance a 0.5 m x q Z 2 2x
0.5 8 11 90
(Assume x 0 )
404 mm
7. High Factor f0 1
8. Bottom Clearance c 0.2 to 0.3 m x
c 0.3 m x
[Take c 0.3 m x]
0.3 8
2.4 mm
9. Pitch Diameter (d)
d1 m x q 2n
8 11 0
88 mm
(Assume n 0)
d2 Z 2m x
90 8
720 mm
Design of Bevel,Worm and Cross Helical Gears 3.185
10. Tip diameter d a
(Assume n 0)
da1 d1 2fo m x d a2 Z 2 2fo 2nm x
88 2 1 8
90 2 0 8
104 mm
da2 736 mm
Root diameter (d f)
df1 d 1 2fom x 2c
88 2 8 2 1 2.4 67.2
68 mm
df2 Z 2 2fo m x 2c
90 2 8 2 2.4 699.2
700 mm
df2 ~
Problem 3.15 Design a worm gear drive to transmit a power
of 22.5 kW. The worm speed is 1440 rpm, and the speed of
the wheel is 60 rpm. The drive should have a minimum
efficiency of 80% and above. Select suitable materials for worm
and wheel and decide upon the dimensions of the drive.
(May/June 2013)
Solution:
Step 1:
Given Data
Power P 22.5 kW 22.5 10 3 W
Worm N 1 1440 rpm
Worm Wheel N 2 60 rpm
Minimum Efficiency (desired 80%
Design of Transmission Systems
3.186
Step 2:
Selection of Material
Worm Always Select (steel)
Worm wheel Choose bronze
From PSG Data book Pg No.8.45; Table 32.
Step 3:
Calculation of lead angle
Diameter Factor q
d1
mx
(Take q 11 )
d 1 11 m x
Z1
tan 1
q
Z 1 3 0.8 0.9
d 0.8
tan 1 3/11
15.25
Step 4:
Calculation of tangential load Ft
Ft
vmg
Z2
hp 75
vmg
Z1
d 2 N2
i
60 1000
m x72 60
60 1000
[d 2 72 m x]
i
i
N1
N2
1440
60
i 24
0.226 mx m/s
Z 2 24 3
Z 2 72
Design of Bevel,Worm and Cross Helical Gears 3.187
Power P
22.5 10 3
hp
750
30 hp
Ft
Ft
hp 75
kgf
V mg
30 75
9955.75
kg f
mx
0.226 m x
99557.5
N
mx
Step 5:
Calculation of Dynamic Load F d
6 vmg
Fd
Ft
6
Assume vmg 5 m/s
6 5 99557.5
m
x
6
Fd
182522.08
mx
Step 6:
Calculation of strength of gear tooth F s
F s [ b] b Y m x
Y 0.392
(Assume 20 From PSG Data book
pg. no. 8.52 [Y 0.392 in chosen]
b 0.75 d 1
8.25 mx
[b] 80 N/mm 2 for bronze.
3.188
Design of Transmission Systems
F s 80 8.25 m x 0.392 m x
258.72 m 2x
Step 7:
Calculation of axial module m x
For safe design
F s Fd
258.72 m 2x
182522.08
mx
m 3x 705.481
m x 8.90
10 mm
mx ~
A standard module chosen, From PSG Data book
pg. No.8.2 Table 1.
Step 8:
Calculation of face width b
b 8.25 m x
83 mm
8.25 10 82.5 ~
Step 9:
Calculation of pitch circle diameter d 2
d2 Z2 m x
72 10
d2 720 mm
Design of Bevel,Worm and Cross Helical Gears 3.189
Step 10:
Pitch line velocity of worm wheel V2
v2 vmg 0.226 m x
0.226 10
2.26 m/s
Step 11:
Recalculation of Dynamic Load Fd
Fd
182522.08 182522.08
mx
10
F d 18252.208 N
Step 12:
Recalculation of strength of great tooth Fs
F s 258.72 m 2x
258.72 10 2
F s 25872 N
Step 13:
Check for Beam Strength
F s F d For satisfactory design.
F s 25872 18252.208 F d
The design is safe based on beam strength of gear.
Step 14:
Calculation of Wear Load Fw
F w d 2 b kw
3.190
Design of Transmission Systems
d 2 720 mm ; b 83 mm
kW 5.6 kg f/cm 2 0.56 N/mm 2 [Assum e 20
For steel and Bronze] From PSG Data book pg
no.8.54 Table 43.
F w 720 83 0.56
33465.6 N
Step 15:
Checking for Wear Strength
For safe design F w F d
F w 33465.6
F d 182522.08 N
By comparing two values F w F d, The design is
safe based on wear strength of gear.
Step 16:
Checking for efficiency
actual
tan
tan
tan 1
Assume 0.03
tan 1 0.03
1.718
15.25
Design of Bevel,Worm and Cross Helical Gears 3.191
actual
tan 15.25
tan 15.25 1.718
desided 80%
actual 0.8934
actual 89.34%
The actual efficiency is greater than that of desired
efficiency, The design is safe [a d]
Step 17:
Calculate the basic dimensions of worm and worm
wheel.
1. Axial module m x 10 mm
2. Number of starts Z 1 3
3. Number of teeth on the worm wheel Z 2 72
4. Face width b 83 mm
5. Length of Worm L 12.5 0.09Z 2 mx
L 12.5 0.09 72 10
189.2
~
190 mm
6. Centre Distance a 0.5 m x q Z 2 2x
(Assume x 0 )
0.5 10 11 1 72 415 mm
7. Height Factor fo 1
8. Bottom Clearance c 0.2 m x to 0.3 m x [Take c 0.3m ]
x
c 0.3 m x
0.3 10
3 mm
3.192
Design of Transmission Systems
9. Pitch diameter
d1 m x q 2n
d1 10 11 0
110 mm
d 2 Z 2m x
72 10
720 mm
(Assume n 0 )
10. Tip diameter d a
da1 d 1 2fom x d a2 Z 2 2fo 2n m x
72 2 1 0 10
99 2 1 10
119 mm
740 mm
11. Root diameter d f
df1 d 1 2fom x 2c
99 2 10 2 3
df1 73 mm
df2 Z2 2fo mx 2c
72 2 10 2 3
694
d f2 694 mm
3.23 DESIGN OF WORM AND WORM WHEEL [Based
on Hertz Method]
Refer PSG Data book Pg. No. 8.43 to 8.49
Step 1: Selection of Material
Refer PSG Data book Page No. 8.45
Worm: Steel
Worm wheel: Cast iron (or) Bronze
Take the values of [ c] Design surface stress and
b Design bending stress in kgf cm2
Design of Bevel,Worm and Cross Helical Gears 3.193
For [c] value
Initially assume sliding velocity vs as 3 m sec and
select wheel material as bronze. Take the value of [c]
From PSG Data book P.No. 8.45.
For [b] value,
The value depends on material, methods of casting of
wheel, u and type of rotation. Take the value of [ b] From
PSG Data book P.No., 8.45
Step 2
Select no. of starts Z 1
Refer PSG Data book Page No. 8.46
Take the value of Z 1, based on efficiency. If efficiency
is not given, assume efficiency and take Z 1.
Step 3
(Refer PSG Data book P.No. 8.44)
Calculation of number of teeth on wheel
Z2 i Z1
Normally Z 2 30 to 70
(For compact reduction unit
choose Z 2 towards the lower
limit;
For
higher
transmission
efficiency
choose Z 2 towards the
higher limit)
In general, For hp 20 ; Z 2 60 to 70
3.194
Design of Transmission Systems
for small hp, Z 2 30 to 50
Step 4
Diameter factor: (q)
q
d1
d 1 pitch diameter of Worm in mm
mx
m x axial module - mm
Initially assume q 11
Step 5
Calculation of design twisting moment [M t] Refer
PSG Data book Page No. 8.44
Mt
Nominal twisting moment
transmitted by worm wheel in kg fcm
hp
71620
i kgf cm
N
Design twisting
moment
[M t] M t k k d
N 1 speed of worm in rpm
k load concentration factor
1 when load is almost con stan t
kd dynamic load factor
1 for V s 3 m sec
Step 6: Calculation of centre distance (a) Refer PSG Data
book Page No. 8.44
Substitute c in kg f/cm 2 and M t in kg f cm then we
get (a) in cm.
Design of Bevel,Worm and Cross Helical Gears 3.195
Z2
1
a
q
3
2
540 [M t]
Z
10 cm
2
q [c]
(Or)
Z2 1
a
q
3
2
540 [M t]
10 cm
Z
2
q [c]
Substitute c in N/mm 2
[M t] in N-mm, then we get ‘a’ in mm.
Step 7: Calculation of axial module m x: Refer PSG Data
book Page No.8.43
mx
2a
q Z 2 2x
assume x 0
x addendum modification coefficient
Refer data book, Refer PSG Data book Page No.
8.2, take the standard value of module.
Step 8: Recalculate centre distance ‘a’
According to the standard value of module m x recalculate
the centre distance a
a
m x q Z 2
2
Step 9: Calculation of sliding velocity vs m sec
d1 Pitch circle diameter of worm q m x
3.196
Design of Transmission Systems
Sliding velocity vs
V1
cos
tan
Z1
q
where lead angle
Check vs:
If vs 3 m sec, then reduce
[ c] design
Z1
tan 1
q
surface stress by 30% of
initial value.
ie., [c] 0.7 Initially assumed value of [c]
Calculation of pitch line velocity of wheel V2:
v2
d 2 N 2
60
d2 mxZ
m sec
N 2 wheel speed in rpm
for v2 3 m sec
kd 1;
Since the value of k and kd 1
There is no change in the value of
moment. [M t]
design twisting
Step 10: Checking of design surface stress [c], Refer PSG
Data book Page No.8.44
Substitute a in cm, M t in kg f/cm , We get, c in
kg/cm 2
540
C
Z2 q
3
Z 2/q 1
[M t]
a
[C ] in kgf/c m
Design of Bevel,Worm and Cross Helical Gears 3.197
(Or)
3
c
540
Z2
q
Z2
1
[m t ]
q
in N/mn2
a
10
Substitute a in mm; [M t] in N-mm; then get c in
N/mm 2
Step 11: Checking of design bending stress [b]
Refer PSG Data book Page No. 8.44
b
1.9 [Mt]
m3x q Z 2 yv
[ b ]
y v form factor
Cal. Z v or Z eq
Z1
cos 3
at the value of Z v take
value of yv
From PSG Databook
Page No.8.18
at X 0
Step 12: Calculation of efficiency
Refer data book Page No. 8.49
tan
tan
Where
lead angle in degree
friction angle in degree
Refer PSG Data book Pg
NO.8.49
3.198
Design of Transmission Systems
From Graph,
at sliding velocity and
according to material
take the value of
where
coefficient
frictional
But tan
Step 13:
Calculate the Basic Dimension of Worm & Worm
Wheel
1. Axial module m x
2a
q Z2 2x
(Assume x 0
2. Number of starts Z 1
3. Number of teeth on the worm wheel Z 2 i Z 1
4. Face width (b) [From table 38, from PSG Data
book pg. 8.48]
5. Length of worm L [Choose L formula from Data
book pg.8.48; Table: 39; Assume n 0]
6. Centre Distance a 0.5 m xq Z 2 2x
7. Height factor fo 1
8. Bottom clearance c 0.2 m x 0.3 m x
9. Pitch diameter d
d1 m x q 2x d2 Z 2 m x
Assume x 0
Design of Bevel,Worm and Cross Helical Gears 3.199
10. Tip diameter d a
da1 d 1 2fom x d a2 Z2 2fo 2x mx
Assum e x 0
11. Root diameter d f
df1 d 1 2fom x 2C d f2 Z 2 2fo mx 2C
Problem 3.16 Design a worm gear drive a transmit 22.5 kW
at a worm speed of 1440 rpm. Velocity ratio is 24:1. An
efficiency of atleast 85% is desired. The temperature rise should
be restricted to 40C. Determine the required cooling area.
Given data
P 22.5 kW ;
N 1440 rpm ;
i 24 ;
T o T a T 40C ;
85%
Solution
Step 1: Selection of material
Assuming worm material as steel and wheel material
as Bronze (sand cast)
From PSG Data book Pg.No. 8.45
u 39 kg f/mm 2 390 N /mm2
[b] 50 N/mm2 (Assume rotation in one direction
only)
Step 2: Calculation of centre distance
From PSG Data book Pg.No. 8.46, Table 37
corresponding to efficiency 85%
number of starts Z 1 3
3.200
Design of Transmission Systems
since
Z2
Z1
i
Z2 i Z 1 24 3 72
Assume q diameter factor
d1
mx
11 (initially)
Assume sliding velocity vs 3 m/s (initially)
From PSG Data book
corresponding to sliding velocity
Pg.
8.45,
Table
[c] 1590 kg f/cm 2 159 N/mm 2
Assume intially k k d 1
From PSG Data book, Pg.No. 8.44,
M t 71620
hp
i
n
since the power is in kW
P
Mt
2 N
Mt
60
P 60 22.5 103 60
3581 N m
1440
2 N2
2
24
From PSG Data book Pg.No. 8.44
[M t] M t kd k 3581 10 3 1 3581 10 3 Nmm
From PSG Data book Pg.No. 8.44
Substitute c is N/mm 2; M t in N-mm.
32,
Design of Bevel,Worm and Cross Helical Gears 3.201
Z2
1
a
q
72
1
11
3
2
540
[M t]
10
Z
2
[
]
q
c
3
2
3581 10
540
10
72 159
11
3
345.9
346 mm
a~
Step 3: Calculation of axial module
Refer PSG Data book Pg.No. 8.43
Axial module m x
2a
q Z 2 2x
Assume x 0
mx
2 346
2a
q Z 2 11 72
m x 8.4 mm
From PSG Data book, Pg.No. 8.2, select standard
module
axial module m x 10 mm
Step 4: Recalculate a and determine d 1
a
m x q Z 2
2
10 72 11
415 mm
2
From PSG Data book Pg.No. 8.43
Pitch circle diameter of worm d 1 q m x
Design of Transmission Systems
3.202
d 1 11 10 110 mm
Step 5:
From PSG Data book Pg.No. 8.44
Sliding velocity vs
V1
cos
Z1
1 3
But tan 1
tan
11
q
15.25
and
v1
d 1 N1
60 1000
110 1440
60 1000
v1 8.3 m/s
vs
8.3
cos 15.25
vs 8.6 m/s
Step 6: Modification of [c]
Since vs 3 m/s (initially assumed), the [c] value has
to be modified.
[ c] is reduced by 20% to account for the increased
speed.
[ c] 0.8 159
127 N/mm 2
Step 7: Determination of Induced stresses
From PSG Data book Pg.No. 8.44
Design of Bevel,Worm and Cross Helical Gears 3.203
c
540
Z2
q
Z2
1
q
a
3
[M t]
10
3
540
72 /11
72
1
3
3581 10
11
415
10
121 N/mm 2 [c]
The design is satisfactory based on surface stresses.
From PSG Data book Pg.No. 8.44
b
Zv
1.9 [M t]
m 3x qZ 2 yv
Z2
3
cos
72
3
cos 15.25
80
From PSG data book Pg.No. 8.18 corresponding to
Z v 80
y v 0.499
b
1.9 3581 10 3
3
10 11 72 0.499
17.22 N/mm2 [b]
The design is satisfactory based on bending
stresses.
Step 8: Efficiency
From PSG Data book Pg.No. 8.49
3.204
Design of Transmission Systems
tan
tan
From PSG Data book Pg.No. 8.49, from graph at
vs 3.5 m/s
0.03
tan
tan 1 tan 1 0.03
1.718
tan 15.25
tan 15.25 1.718
0.8935 89.35%
Step 10: Heat removal analysis
1 Input power kt To Ta A
1 0.8935 22500 10 40 A
[Assume kt 10 w /m 2 C ]
A 5.99 m 2
Cooling Area 5.99 m 2
Problem 3.17 A 2 kW power is applied to a worm shaft at
720 rpm. The worm is of quadruple start type with 50 mm as
pitch circle diameter. The worm gear has 40 teeth with 5 mm
module. The pressure angle in the diametral plane is 20.
Determine (i) the lead angle of the worm, (ii) velocity ratio
and (iii) centre distance. Also calculate efficiency of the worm
gear drive and power lost in friction.
Design of Bevel,Worm and Cross Helical Gears 3.205
Solution
P 2 kW
N 1 720 rpm
Z 1 4 since quadruple start
d 1 50 mm
Z 2 40 teeth
m 5 mm
i V.R
Z2
Z1
40
10
4
Step 1
Selection of material
From PSG Data book Pg.No. 8.45
Worm
Wheel
–
–
steel
Bronze, sand, chill
[b] 50 N/mm2
[c] 159 N/mm 2 at Vs 3 m/s
Step 2
Calculation of centre distance
From PSG Data book Pg.No. 8.44
Z2
a
1
q
3
2
540 [M t]
Z
10
2
[
]
q
c
3.206
Design of Transmission Systems
q 10 (diameter factor) From PSG Data book
Pg.No. 8.46; Table 36.
Initially assume k kd 1
Mt
Po wer 60
2 10 3 60
720
2 rpm of wh eel
2
10
265.25 Nm
265.25 10 3 Nmm
[M t] M t k k d
265.25 10 3 1
265.25 10 3 Nmm
40
1
a
10
3
2
265.25 10
540
10
40
10 159
133.7 mm
Step 3
Lead angle
From PSG Data book Page No. 8.43
tan
Z1
q
4
0.4
10
tan 0.4
3
Design of Bevel,Worm and Cross Helical Gears 3.207
tan 1 0.4
21.8
Step 4
Efficiency of worm gearing
From PSG Data book Pg.No. 8.49
tan
tan
We know sliding velocity vs
But v1
v1
vs
v1
cos
d1 N 1
60 1000
50 720
1.884 m/s
60 1000
1.884
2.03 m/s
cos 21.8
From PSG Data book Pg.No. 8.49
from the graph, corresponding to sliding velocity and
plot of bronze worm wheel
0.045
tan
But
tan 0.045
tan 1 0.045
2.576
3.208
Design of Transmission Systems
tan 21.8
tan 21.8 2.576
0.8827
88.27%
Step 5
Power lost in friction Q
Q P 1
2 103 1 0.8827
234.6 watts
0.234 kW
Problem 3.18 A worm drive transmits 15 kW at 2000 rpm
to a machine carriage at 75 rpm. The worm is triple threaded
and has 65 mm Pitch diameter. The worm gear has 90 teeth
of 6 mm module. The tooth form is to be 20 full depth involute
coefficient of friction is 0.1;
Calculate (i) Tangential force acting on the worm (ii) axial
thrust and separating force on worm. and (iii) efficiency of
worm drive.
Solution
Given Data:
P 15 kW ;
N 1 2000 rpm;
N 2 75
rpm;
Z 1 3;
d 2 65 mm; Z 2 90 ; m x 6 mm 20; 0.1
1. Tangential force acting on the worm (refer PSG
Data book P.No. 8.57)
Design of Bevel,Worm and Cross Helical Gears 3.209
Ft
2M t
M t 97420
d2
2 730.65
6.5
224.81 kg
kW
N1
97420
15
2000
730.65 kg f cm
2. Axial thrust on Worm: (refer PSG Data book Page
No. 8.57)
F a F t tan
tan
224.81 tan 15.47 5.71
87.10 kg
d2
Z1
q
65
10.83
6
3
tan 1
10.83
Lead angle 15.47
q
mx
3. Separating force
(or) Radial force
F t tan
Frictiona l coefficient
tan 0.1
224.81 tan 20
tan 1 0.1
81.824 kg
friction angle 5.71
pressure angle 20
4. Efficiency
tan
(refer PSG Data book Pg.
tan
No. 8.49)
tan 15.47
0.7142
tan 15.47 5.71
71.42%
3.210
Design of Transmission Systems
Problem 3.19 Determine the efficiency of worm gear drive to
transmit 20 hp from a worm at 1440 rpm to the worm wheel
the speed of the worm wheel should 40 2% rpm.
(May /June 2008)
Solution
Given Data:
Power P 20 hp ; Speed of worm N 1440 rpm
Speed of Worm wheel 40 2%
Gear
ratio i
1440
speed of worm
36 2%
speed of worm wheel
40
i.e ,
% deviation of i 2%
Selection of material and design stresses refer
Databook, Refer PSG Data book Page No. 8.45
Worm - steel;
Worm wheel
Bronze
(sand
u 39 kgf mm
chill
cast)
-
2
(assume rotation in one direction only)
Take [b]
Design bending stress 500 kgf mm 2
and [c]
Design surface stress 1590 kgf cm 2
(assume initially, the sliding velocity
vs 3 m sec
Since the efficiency is not given, assume efficiency
as 80%
Refer PSG Data book page No. 8.46
For efficiency 0.70 to 0.82 ,
Design of Bevel,Worm and Cross Helical Gears 3.211
The value of Z 1 no. of starts 2
But, i gear ratio
Z2
Z1
; where Z 2 no. of teeth on
worm wheel
Z 2 iZ 1 36 2 72 teeth
Assume q diameter factor
d
11 (initially)
mx
where d pitch diameter of worm mm
m x axial module mm
Design twisting moment [M t]
Refer PSG Data book Page No. 8.44
Design
torque [M t] M t kd k
25464.88 1 1
[M t] 25464.88 kgfcm
M t 71620
hp
i
n
71620
20
32 0.8
1440
25464.88 kg f c m
Assume k kd 1 initially
Centre distance, a refer PSD Databook, Page
No. 8.44
Centre distance (a)
Z2
1
a
q
3
2
540
Z q [ ] [M t]
C
2
3.212
Design of Transmission Systems
72
1
a
11
3
2
540
25464.88
72 1590
11
a 30.88 cm 388.8 mm
Take centre distance a 309 mm
Calculation of axial module, mx Refer PSG Data
book Page No. 8.43
axial module m x
2a
q Z 2 2x
assume x 0
2 309
7.53 mm
11 72 0
From PSD data book, refer page No. 8.2, select
standard module
axial module m x 10 mm
Recalculate, centre distance (a)
a
m x q Z 2
2
10 11 72
415 mm
2
Refer PSG Data book Page No. 8.43
Reference diameter of worm d 1 q m x 11 10
110 mm
Refer PSG Data
P.No. 8.44
Sliding velocity
V2
vs
cos
book
Z1
2
q
11
lea d angle 10.3
tan
Design of Bevel,Worm and Cross Helical Gears 3.213
8.293
cos 10.3
v1
d 1 N
60
8.429 m /sec
0.11 1440
60
8.293 m sec
Since vs 3m sec (initially assumed)
Therefore, reduce [c] by 30%
Now, The design surface stress
[ c] 0.7 1590 1113 kg f cm2
Checking of surface stress, c
Refer PSG Data book Page No.8.44
540
C
Z 2 q
3
Z 2 q 1
[Mt]
a
[ c]
3
540
72 11
72
11 1
25464.88
415
32.276 kg f cm 2 [ c] 1113 kg f cm 2
The design is satisfactory based on surface stress.
Checking of bending stress, b
Refer PSG Data book Page
No.8.44
Zv
Z2
3
cos
72
3
c os 10.3
3.214
b
Design of Transmission Systems
1.9 [Mt]
[b]
3
mx q Z2 yv
73.59
Take approximately
Zv 80 teeth
1.9 25464.88
13 11 72 0.499
122.42 kgf cm2 500 kgf cm2
Refer PSG Data book
P.No. 8.18
take yv 0.499
(at
Zv 80 teeth)
mx 10 mm 1 c m
The design is satisfactory based on bending stress
To find efficiency of drive
Refer PSG Data
Page No. 8.49
tan
tan
tan 10.3
tan 10.3 1.718
0.85 85%
book
friction angle
from graph (P.No. 8.49)
at vs 3.5 m sec, 0.03
tan 0.03
tan 1 0.03
1.718
CROSSED HELICAL GEARS
3.24 Screw or Skew gears (crossed helical gears)
These helical gears are also known as spiral gears.
They are true helical gears and only differ in their
application for interconnecting skew shafts shown in
Fig. 3.9. Screw gears can be designed to connect shafts at
any angle, but in most applications the shafts are at right
angles.
Design of Bevel,Worm and Cross Helical Gears 3.215
1. Helical gears of the same hand operate at right
angles.
2. Helical gears of opposite hand operate on parallel
shafts.
D rive r
D rive r
D rive r
D rive r
L eft-H an d
D rive r
D rive r
Fig.3.9.Types o f H elical Gear M eshes.
Helical angles 1 and 2 need not be the same.
However, their sum must be equal to shaft angle.
1 2
Where 1 and 2 are the respective helix angles of the
two gears and is the shaft angle.
Module: Because of the possibility of different helix
angles for the gear pair, the radial modulus may not be
the same. However, the normal modulus must always be
identical.
Design of Transmission Systems
3.216
Let a pair of screw gears have the shaft angle and
helix angles 1 and 2, fig 3.10. If they have the same
hands, then
1 2
If they have the opposite hands, then
1 2 or 2 1
Crossed helical gears are noiseless in operation due
to smooth engagement and disengagement. These gears are
not suitable for high transmission of power, because of
point contact between teeth. The efficiency of the drive is
less due to relative sliding of teeth along the common
tangent.
G ea r 1
(R igh t-H a nd (L eft-H a nd )
2
2
1
1
G ea r 2
(R igh t-H a nd )
Fig. 3.10. Screw Gea rs o f N o nparallel and
N on inters ecting A xes.
Fig. 3.10 Screw Gears of Non parallel and Non-intersecting Axes
Design of Bevel,Worm and Cross Helical Gears 3.217
3.24.1 Design procedure (Refer PSG data book Page
No. 8.55)
Let
P n Circular pitch,
P d Diameteral pitch
suffix n refers to normal plane
suffixes 1, 2 refer to driving and driven wheels
respectively
P dn P cn
P cn P c cos 1 P c cos 2
1
P dn
2
P d1
cos 1
Pd 2
c o s 2
D pitch diameter of the gear
D 1 pitch diameter of driving wheel
Z 1 P cn
c o s 1
Similarly,
D 2 pitch diameter of driven wheel
i velocity ratio
1 2 ;
Z2
Z1
Z 2 P cn
c o s 2
D 2 cos 2
D 1 cos 1
when both helicals are of the same hand
when both helicals are of the opposite
hand
Z v virtual number of te eth
3.218
Design of Transmission Systems
Z1
cos 3 1
Z2
cos3 2
1. To calculate strength of the gear tooth
Let
F s strength of the gear tooth kgf
[b] design bending stress kgf/cm 2
b face width – cm
Y form factor y
C wear and lubrication factor
(Refer table 44, PSG design data book P.No. 8.55)
FS
[b] b Y
P dn C w
kgf
Modified as,
FS
[b] b y
P C w
cm
[b] b P cn y
Cw
kgf
2. Calculation of Dynamic load F d
Let
F d Dynamic load kgf
Fd Ft Cv
where
F t Transmitted load
hp 75
Vm
hp is the given power
V m is the mean velocity in m/sec
Design of Bevel,Worm and Cross Helical Gears 3.219
Velocity factor C v
4.5 V m
4.5
Equate (1) and (2) to calculate P cn and then find the
value of module.
3. Calculation of wear load
Let
F w wear load
F w kQ D 21
Where
k Load stress factor
[refer Table 45, PSG Design book P.No. 8.55]
2D 2
Q Ratio factor
D D2
1
2
4. Calculation of lead l
l1 lead of the driving wheel D 1 tan 2
l2 lead of the driven wheel D 2 tan 1
5. Calculation of center distance
a centre distance
Z1
2P dn f c o s 1
Z2
2Pdn cos 2
3.220
Design of Transmission Systems
3.26 The Equations
for a
Screw
Gear Pair on
Nonparallel and Non-interacting Axes in the Normal
System
No.
Item
Symbol
Formula
Example
Pinion
Gear
1
Normal module
ma
3
2
Normal Pressure
Angle
n
20
3
Helix Angle
20
30
4
Number of Teeth
& Helical Hand
Z1, Z2
15 R
24 L
5
Number of Teeth
zv
18.0773
36.9504
of an Equivalent
Spur Gear
Z
3
cos
6
Radial Pressure
Angle
1
7
Normal
Coefficient of
xn
8
Involute
tan n 21.1728 22.7959
tan 1
cos
0.4
0.2
Profile Shift
Function n
inv n
2 tan n
0.0228415
Xn1 Xn2
Zy1 Zy2
inv n
9
Normal Working
Pressure Angle
n
Find from
22.9338
Involute
Function
Table
10
Radial Working
Pressure Angle
xt
tan 1
tan n
c o s
24.2404 26.0386
Design of Bevel,Worm and Cross Helical Gears 3.221
No.
Item
Symbol
Formula
Example
11
Center Distance
Y
1
Z Zv2
2 v1
0.55977
Increment Factor
cos n
1
cos wn
12
Center Distance
x
z1
2 cos 1
z2
y
2 cos 2
mn
13
Pitch Diameter
d
Zmn
67.1925
47.8880
83.1384
d cos t
44.6553
76.6445
d1
49.1155
85.2695
c os
14
Base Diameter
db
15
Working Pitch
dx1
2ax
Diameter
dx2
16
Working Helix
Angle
n
17
Shaft Angle
2ax
d1 d2
d2
d1 d2
dx
20.4706 30.6319
tan 1
tan
d
w1 w2
51.1025
or w1 w2
18
Addendum
1 y
ha1
xn2 mn
ha2
1 y xn1
4.0793
3.4793
mn
19
Whole Depth
h
[2.25 y xn1 6.6293
xn2] mn
20
Outside Diameter
da
d 2ha
56.0466
90.0970
21
Root Diameter
dt
da 2h
42.7880
76.8384
Chapter 4
DESIGN OF SPEED REDUCERS
(Gear Boxes)
Geometric progression - Standard step ratio - Ray diagram,
kinematics layout -Design of sliding mesh gear box - Design of
multi speed gear box for machine tool applications - Constant
mesh gear box - Speed reducer unit. – Variable speed gear box,
Fluid Couplings, Torque Converters for automotive applications.
4.1 GEAR BOX
A gearbox is a mechanical method of transferring
energy from one device to another and is used to increase
torque while reducing speed. A group of gears put together
in a manner to increase the torque of an engine and reduce
the speed is known as gear box. Generally gear boxes are
also known as speed reducers, or gear reducers.
4.2 TYPES OF GEAR BOXES
According to the type of drive used: Spur, helical,
bevel and worm gears.
According to the No. of stages:
(i) Single stage Gear box:
It means one pair of gear wheels, such as one pinion
and one wheel can be operated to reduce the speed.
(ii) Multi-stage Gear box:
It means two or more pairs of gears can be operated
to reduce the speed.
4.2
Design of Transmission Systems
In case of machine tools, the gear box is used to
reduce the cutting speed. The cutting speed depends on
material of the job, cutting tool used and nature of
operation.
The same machine tool may be used for different
working conditions. Therefore, it is necessary to provide a
gear box between motor and spindle for changing the
spindle speeds.
There are variety of gear boxes used in industries
such as aerospace, paper, mining, agriculture, etc...
The toothed gears are used as independent units to
reduce or increase the speed and they are enclosed in rigid
closed housings.
The housings provide
1. Support for the shafts
2. Hold lubricant inside
3. Protect the gear from dust and moisture
4. Give necessary cooling surface to dissipate the
heat generated.
When the unit is used as a speed reducing device, it
is called as “speed reducer.”
4.2.1 Applications
Speed reducers are widely used for reduction of speed
in turbine generator set; from motor to machine tool
spindles; in rolling mills; from engine to road wheels in
automobiles, etc.
Speed reducers are widely used for reduction of speed
in conveyors, crushers, cranes, elevators, feeders, small
and large ball mills, mixers, towers and coal pulverising
units.
Design of Speed Reducers (Gear Boxes) 4.3
Major Manufacturing Industries – Sugar, cement,
elevator, paper, plastic and leather, rubber, steel
industry, power plant, mines and minerals, waste
water treatment and extraction.
In speed reducers, gears are arranged in different
forms:
1.
Single reduction
2.
Double reduction
with spur gear, bevel gear and
worm and worm wheel
with spur gear, bevel gear and
worm and worm wheel
4.2.2 Requirements of Speed Gear Boxes
It should provide silent operation of the power
transmission.
To reduce / increase the rpm.
Change the direction of rotation (Clockwise /
Anticlockwise)
Shift the axis of rotation (linear or angular)
To transmit the required power to the spindle.
4.2.3 Method of changing speed in gear boxes
Mainly two important methods are used,
(i) Sliding mesh gear box
(ii) Constant mesh gear box.
4.2.4 Requirements to obtain optimum design
To reduce large diameter of the gear wheels and also
to limit the pitch line velocity of gear drive, the following
principles are to be followed.
1. Number of gears on the last stage should be
minimum.
4.4
Design of Transmission Systems
2. Number of gears on shafts should not be more
than three. (But in some cases it may be four)
3. It is necessary to have,
N maximum N input N minimum in all stages, except
in the first stage.
4. The transmission ratio between driver and driven
shaft should be the maximum.
N minimum 1
N maximum
2 and
(For all stages,
N minimum
4
Ninput
except for first stage)
4.2.5 Main components of gear box
Shafts for mounting gears.
Oil seals for lubrication.
Bearings to support shafts.
Gears for getting different speeds.
Gear box housing used for covering all inner
components.
4.2.6 Speed Changing
In the conventional gear box, speed changing is
obtained by using sliding gears.
Compound gears are mounted on splined shaft and
are moved by means of forced lever pivoted at the casing.
4.3 SPEED DIAGRAM (OR) RAY DIAGRAM
The speeds of the spindle should be in the
geometric series, in order that the number of
gears employed to be minimum and also to reduce
speed loss. Preferred Nos. are in Geometrical
progression.
Design of Speed Reducers (Gear Boxes) 4.5
The speed of driving shaft, driven shaft and
intermediate shafts can be represented easily in one
diagram. That particular diagram is called ‘Speed diagram’
(or) Ray diagram.
( D rive r)
H ig h
Sp eed
H ig h
Sp eed
(D rive r)
L ow
Sp eed
( D rive n)
(a) Sp ur Gear
L ow S peed
( D rive n)
(b) Bevel G ear
L ow speed
D riven
L
L ow
Sp eed
D riven
H ig h
Sp eed
D river
(c) Worm & Worm Wh eel
H ig h S peed D river
Fig. 4.1 Single Red uction Sp eed R edu cers
4.6
Design of Transmission Systems
H
H
S pur G ears
W orm
W he el
I
I
I
I
L
L
I
H
L
W orm
(a) Spur Gears
(b) Spu r An d
(c) W orm & Wo rm Wh eel
Bevel G ears
and Spu r G ear
H - H igh Spe ed
I - In term ed iate S pe ed
Fig. 4.2 Do uble R eduction Speed Reducers
L - L ow S pe e d
4.3.1 Geometric progression and standard step ratio
Step 1
Calculate step ratio
Let N max Maximum speed required.
N min Minimum speed required
Z No. of speeds required.
N max
N min
Z 1
Calculate step ratio ‘ ’
There are three methods to find the required speeds.
Design of Speed Reducers (Gear Boxes) 4.7
1st Method
The standard step ratio values are available in
(Refer PSG databook, Page No. 7.20) R5 – 1.6; R10 – 1.25;
R20 – 1.12; R40 – 1.06. The standard step ratio values are
given in Geometric progression in the above series.
If the calculated value of is coinciding with the
standard step ratio, then select that series and write the
speeds from N min , N 2, N 3 N max , continuously.
For example
N max 335 rpm ; N min 100 rpm; Z 12 speeds
N max
Nmin
Z 1
355
12 1 ; 1.12
100
which is standard step ratio of R20 series.
The value of obtained is exactly coinciding with R20
series. Therefore take R20 series and write 12 speeds
continuously.
N 1 100; N 2 112; N 3 125; N 4 140 ; N 5 160;
N6 180; N 7 200; N 8 224; N 9 250; N 10 280 ;
N 11 315; N 12 355
2nd Method
If the calculated value of is non-standard step ratio,
then try the multiples of standard step ratios and try the
series.
4.8
Design of Transmission Systems
For example
N max 1600 rpm; N min 500 rpm; Z 6 speeds
N max
N min
Z 1
1600
6 1; 1.26
500
which is a non-standard step ratio.
Trail 1
Take R40 series step ratio 1.06 and try multiples.
1.06
1.06 1.06 1.06 1.26
Skip 3 speeds.
By multiplying R40 series step ratio by 4 times, the
value obtained is similar to the required step ratio.
Therefore take R40 series by skipping three speeds
ie., N 1 500; N 2 630; N 3 800; N 4 1000 ; N 5 1250 ;
N 6 1600
Since the value of N 6 1600 is coinciding with the
required value of N max , therefore the selection of this trail
is satisfactory.
Note:
Try any standard step ratio multiples (i.e., R5 or R10
or R20 or R40)
If the multiples are four means, skip three speeds
(i.e., multiples minus one)
If the multiples are three - skip two speeds.
Design of Speed Reducers (Gear Boxes) 4.9
3rd Method
If the value is not coinciding with standard step
ratio. (or) If the multiples of standard step ratio are also
not coinciding, then find the speeds by using this method.
Note
Before using this method, first try method (1) and
method (2).
For example:
N max 600 rp m; N min 23 rpm; Z 12 speeds
N max
N min
Z 1
600
12 1 1.345
23
(which is a non-standard step ratio)
Trail 1
Take R20 series multiples 1.12
1.12 1.12 1.12 1.404
which is greater than required; not satisfactory.
Trail 2
Take 1.06 (R40 series) multiples
1.06
1.06 1.06 1.06 1.06 1.338
Skip 4 speeds.
which is approximately equal to the required value.
Therefore, try R40 series by skipping 4 speeds.
4.10
Design of Transmission Systems
N 1 23.6; N 2 31.5; N 3 42.5 N 4 56; N 5 75; N 6 100;
N 7 132; N 8 180; N 9 236 N 10 315; N 11 425; N 12 560;
The maximum speed obtained is 560 rpm. But the
required maximum speed is 600 rpm.
Therefore the above trail is not satisfactory.
To obtain speeds (Approximate Method)
N 1 23 rp m
N 2 N 1 23 1.345 30.935 31 rpm
N 3 31 1.345 41.495 42 rpm
Similarly N 4 56 rpm; N 5 75 rpm; N6 101 rpm;
N 7 136 rp m; N 8 183 rpm; N 9 246 rpm; N 10 331 rp m
N 11 445 rpm; N 12 599 rpm
The maximum speed obtained is almost equal to the
required maximum speed.
Design of Speed Reducers (Gear Boxes) 4.11
4.4 STRUCTURAL FORMULA
Preferred Structural formula
Write the No. of speeds requried in multiples of 2
and 3 as given table 4.1
Table 4.1
6 speeds
3 2
P1 P 2
9 speeds
3 3
P1 P 2
12 speeds
or
2 3
P1 P2
3 2 2 or 2 3 2 or 2 2 3
P1 P 2 P 3
18 speeds
P1 P2 P3
P1 P2 P3
3 3 2 or 2 3 3 or 3 2 3
P1 P 2 P 3
16 speeds
P1 P2 P3
P1 P2 P3
2 2 2 2
P1 P 2 P 3 P 4
Structural formula
Z P 1 X 1
P 2 X 2
, P 3 X 3
2 nd stage
3rd stage
,
1 st stage
For example: 12 speed gear box
Speed
3 2 2
P1 P2 P3
12
P1 3
X 1 1 always
P2 2
X2 P1 3
P3 2
X3 P1 P2 3 2 6
3 1
1
st
Space
stage
2 3
,
2
nd
stage
2 6
,
3
rd
stage
4.12
Design of Transmission Systems
In the ray diagram,
1st stage:
3 speeds required with one space interval
between each speed
2nd stage:
2 speeds required with three space interval
between each speed
3rd stage:
2 speeds required with six space interval
between each speed.
4.5 CONSTRUCTION OF RAY DIAGRAM
Let u No. of stages.
Draw u 1 vertical lines (with some distance)
The 1st vertical line from left represents the driver
shaft in the 1st stage and 2nd line represents the driven
shaft for the 1st stage and driver shaft for the 2nd stage
and so on.
That means, in each stage consists of one driver shaft
and one driven shaft.
Draw a series of parallel horizontal lines with equal
space according to number of speeds required.
Selection of N input in each stage
To obtain optimum design of gear box,
Check, for each stage, except for the 1st stage
N max
N input
2 and
Nmin
N input
1
4
(or)
N max N input N min
If this is not possible to satisfy, then try
Design of Speed Reducers (Gear Boxes) 4.13
N max
N input
N input
N min
Always start the ray diagram from the
minimum speed.
At the end, all speeds should be completely
filled.
4.6 KINEMATIC LAYOUT
To draw the kinematic arrangement, find the total
number of gears required.
Approximate method to find No. of gears required.
Table 4.2
No. of
speeds
Factors
Approximate
No. of gears
2
2 1
2 2 4
3
3 1
2 3 6
do not consider 1
4
22
2 2 2 8
6
23
2 2 3 10
8
222
2 2 2 2 12
9
33
2 3 3 12
12
232
2 2 3 2 14
16
2222
2 2 2 2 2 16
18
332
2 3 3 2 16
4.14
Design of Transmission Systems
Draw the approximate kinematic diagram according
to the required input and output speeds according to the
stages.
In case of 2 speeds, there are two pairs of gears.
One pair gives the maximum speed and the other
pair gives the minimum speed.
In case of 3 speeds, there are three pairs of gears.
One pair gives the maximum speed. One pair
gives the minimum speed and the other pair gives
the intermediate speed.
In each stage, the minimum No. of teeth on one
gear can be assumed between 17 to 20; Maximum
No. of teeth should not exceed to 120 teeth.
In case of 3 pairs of gears, to avoid interference,
check the difference between adjacent gear No. of
teeth. The value should be greater than or equal to
4.
To find the No. of teeth on each gear, use velocity
ratio,
V.R
Speed of driven No. of teeth on driver
Speed of driver No. of teeth on driven
... (1)
In case of 2 speeds, let Z 1 and Z 3 are driver gears
and Z 2 and Z 4 are driven gears.
Assume centre distance is constant, then
Z 1 Z 2 Z3 Z4
... (2)
By using relations (1) and (2), calculate No. of teeth
on each gear.
By solving numerical
understand the concepts.
problem,
we
can
easily
Design of Speed Reducers (Gear Boxes) 4.15
Basic Series of Preferred Numbers (From PSG D.B7.20)
R 5
R 10
R 20
R 40
1.6
1.00
1.25
1.00
1.12
1.00
1.06
1.00
1.06
1.12
1.18
1.25
1.32
1.40
1.50
1.60
1.70
1.80
1.90
2.00
2.12
2.24
2.36
2.50
2.65
2.80
3.00
3.15
3.35
3.55
3.75
4.00
4.25
4.50
4.75
5.00
5.30
5.60
6.00
6.30
6.70
7.10
7.50
8.00
8.50
9.00
9.50
10.00
1.12
1.25
1.25
1.40
1.60
1.60
1.60
1.80
2.00
2.00
2.24
2.50
2.50
2.50
2.80
3.15
3.15
3.55
4.00
4.00
4.00
4.50
5.00
5.00
5.60
6.30
6.30
6.30
7.10
8.00
8.00
9.00
10.00
10.00
10.00
4.16
Design of Transmission Systems
Problem 4.1: Design a 12 Speed Gear Box
The speed range required is 100 to 355 rpm
(a) Draw the Ray diagram,
(b) Draw the Kinematic arrangement,
(c) Calculate the No. of teeth on each gear.
(Oct. 2007)
Solution:
N max
N min
Z 1
N max 355 rpm
355
12 1
100
N min 100 rpm
11 3.55
Z No. of speeds 12
1.122
From PSG Data book Page No. 7.20
The progression ratio 1.122
Coincides with R20 series standard Geometric
progression ratio.
Therefore select R20 series speeds
N 1 100 rpm; N 4 140 rpm; N 7 200 rpm;
N 10 280 rpm
N 2 112 rpm; N 5 160 rpm; N 8 224 rpm;
N 11 315 rpm
N 3 125 rpm; N 6 180 rpm; N 9 250 rpm;
N 12 355 rpm
Design of Speed Reducers (Gear Boxes) 4.17
Structural Formula
Stage
Speed
Z322
I
P1 3
X1 1
12 P 1, P 2, P 3
II
P2 2
X 2 P1 3
P3 2
X 3 P 1 P2
P 1X 1, P 2X 2, P3X3
12 3 1,
st
1 stage 2
2 3,
2 6
nd
rd
stage 3
III
Space
326
stage
u No. of stages 3
D raw u 1 3 1 4 vertical
lines.
Since 12 speeds, draw 12 horizontal
lines.
Procedure for the construction of Ray diagram
3rd Stage: 2 speeds, 6 spaces.
At 100 rpm (min), Locate Point (A)
Leave six intervals. At 200 rpm - mark point (B).
i.e., Point (B) represents N max 200 rpm , Point (A)
represents N min 100 rpm
Locate input speed at Point (C) and check:
N max
N input
2
or
N min
N input
Select
N input 160
rpm
and
mark it as (C)
200
1.25 which is less than 2
160
1
0.25
4
Join CA and CB
Selection of N input 160 rpm
is satisfactory.
4.18
Design of Transmission Systems
3 (1)
2 (3)
RAY DIA GR AM
2 (6)
Design of Speed Reducers (Gear Boxes) 4.19
2nd Stage: 2 speeds, 3 spaces.
Locate Point (D) above Point (C) after 3 spaces.
Join DA 3 and DB 3
To find N input for 2nd stage.
N max 224 rpm
N min 160 rpm
Select N input 200 rpm
N max
N input
N min
N input
224
1.12
200
2
1 160
0.8
;
4 200
which
is
less
than 2
Selection of N input 200
is satisfactory.
Locate Point (E) at
200 rpm.
(Note: Selection of N input 180 rpm is also correct.)
1st Stage: There are 3 speeds with 1 space interval.
Mark (F) and (G) with 1 space interval from E .
Locate (H) as Input of Motor
For first stage, it is not necessary to satisfy the
condition.
N max
2
Ninput
Join H and F
From (F), draw (2) speeds
4.20
Design of Transmission Systems
FC 1 and FD 1
180 rpm 250 rpm
(Maintain again 3 space intervals in II stage)
From C1 draw 2 speeds. (112 rpm, and 224 rpm)
C1A 1 and C 1B 1
112 rpm
(Maintain again 6 space
intervals in III stage)
224 rpm
Join H and G
From (G) draw 2 speeds (200 rpm and 280 rpm)
GC 2 and GD 2
280 rpm
200 rpm
(Maintain again 3 space
intervals in II stage)
From C2 draw 2 speeds (125 rpm and 250 rpm)
C2A 2 and C 2B 2
125 rpm
(Maintain again 6 space
intervals in III stage)
250 rpm
From D:
Draw (2) speeds (140 rpm and 280 rpm)
DA3 and DB 3
280 rpm
140 rpm
(Maintain again 6 space
intervals in III stage)
From D1:
Draw (2) speeds (160 rpm and 315 rpm)
D1A4 and D 1B 4
160 rpm
315 rpm
(6 space intervals)
From D2:
Draw (2) speeds (180 rpm and 355 rpm)
Design of Speed Reducers (Gear Boxes) 4.21
D2A5 and D 2B 5
180 rpm
(6 space intervals)
355 rpm
Kinematic Diagram
No. of Gears required are
23 2 2 27
For details, refer
page 4.13. Table 4.2
Calculation of Number of Teeth: Refer kinematic
arrangement
III Stage
14 Gears
1st Pair (Reducing speed)
Speed of driven N 1 Z 2
Speed of driver N2 Z1 Speed of driver N 160 rpm
2
Let Z 2 20 teeth
100 20
160 Z 1
Speed of driven N1 100 rpm
(Assume above 17 teeth.)
1st Pair: Z1 32 teeth
20 160
Z1
32 teeth
100
Z2 20 teeth
2nd Pair: Increasing speed N 3 driven speed 200 rpm
N 4 driver speed 160 rpm
Speed of driven N 3 Z 4
Speed of driver N 4 Z 3
... (1)
Z 1 Z 2 Z 3 Z 4 because centre distance is same.
32 20 Z 3 Z 4
Z3 Z4 52
... (2)
4.22
Design of Transmission Systems
3 (1)
2 (3)
RAY DIA GR AM
2 (6)
Design of Speed Reducers (Gear Boxes) 4.23
4.24
Design of Transmission Systems
200 Z 4
Z 4 1.25 Z 3
160 Z 3
Z 3 1.25 Z3 52
Z3
52
23
2.25
Take Z3 23 teeth
2nd Pair Z3 23 teeth
Z 4 52 23 29 teeth
Z4 29 teeth
II Stage
1st Pair: Reducing speed
Speed of driven N 7 Z8
Speed of driver N 8 Z 7
N8 driver speed 200 rpm
160 20
200 Z 7
Z7
N7 driven speed 160 rpm
Assume Z 8 20 teeth
20 200
; Z 7 25 teeth
160
1st Pair: Z7 25 teeth; Z8 20 teeth
2nd Pair: Increasing speed.
N 6 driver speed 200 rpm
N 5 driven speed 224 rpm
Speed of driven N 5 Z 6
Speed of driver N 6 Z 5
Z 7 Z 8 Z 5 Z 6, b ecau se centre dis tance is same
25 20 Z 5 Z 6
Z5 Z6 45
... (1)
Design of Speed Reducers (Gear Boxes) 4.25
224 Z 6
200 Z 5
Z 6 Z 5 1.12
Z 5 1.12Z 5 45
Z5
45
21.22
2.12
Take Z 5 21 teeth
2nd Pair: Z5 21 teeth
Z 6 45 21
Z6 24 teeth
24 teeth
I Stage
In this stage, there are 3 speeds; and 3 pairs of gears
are required.
To avoid interference of gear of one shaft with the
gear of the other shaft while shifting,
Z 1 Z 3 9 4 also Z7 Z5 4
Z 4 Z 2 9 4; Z 6 Z8 4;
1st Pair: Reducing speed
condition satisfied
N 10 driver speed 355 rpm
N 9 driven speed 200 rpm
N9
Z 10
Speed of driven
Z9
Speed of driver N 10
Assume Z 10 20 teeth
200 20
355 Z 9
Z9
Take Z9 36 teeth
355 20
35.5
200
4.26
Design of Transmission Systems
1st Pair: Z9 36 teeth
Z10 20 teeth
2nd Pair: Intermediate speed
Spee d of driven N 13 Z 14
Speed of driver N 14 Z 13
224 Z 14
355 Z13
Since centre distance is same,
Z 9 Z 10 Z 13 Z 14 36 20 56
Z14 Z13 0.63
Z 13 0.63Z 13 56
Z 13
56
34 teeth
1.63
Z 13 34 teeth
Z 14 56 34
22 teeth
3rd Pair: Increasing speed N 11 driven speed 250 rpm
N 12 driver speed 355 rpm
Speed of driven N 11 Z 12
Speed of driver N 12 Z 11
250 Z 12
355 Z 11
Z12 Z11 0.704
Design of Speed Reducers (Gear Boxes) 4.27
Since centre sitance is same, Z 11 Z12 Z 13 Z 14 56
Z 11 Z12 56
Z 11 0.704 Z 11 56
Z 11 32.85
T ake Z 11 33 teeth
3rd Pair: Z11 33 teeth
Z12 23 teeth
Z 12 56 33 23 teeth
No. of teeth on all the gears are given here:
1st stage
Z 9 36 teeth
Z 12 23 teeth
Z 10 20 teeth
Z 13 34 teeth
Z 11 33 teeth
Z 14 22 teeth
2nd Stage
3rd Stage
Z 5 21 teeth
Z 1 32 teeth
Z 6 24 teeth
Z 2 20 teeth
Z 7 25 teeth
Z 3 23 teeth
Z 8 20 teeth
Z 4 29 teeth
Problem 4.2: The maximum and minimum speeds of a 6
speed gear box are to be 1600 rpm and 500 rpm respectively.
Construct the speed diagram and the kinematic arrangement
of the gear box.
(Apr. 2008)
4.28
Design of Transmission Systems
Given Data:
No. of speeds Z 6
Max. speed
N max 1600 rpm
Min. speed
N min 500 rpm
N max
N min
Z 1
1600
6 1
500
1600
500
1
5
1.2619
1.2619 is not a standard step ratio.
Therefore, Trail (1): for R40 series,
1.06
1.06
1.06 1.06 1.06 1.2624
Skip 3 speeds
Skip (3) speeds and try R40 series.
N 1 500 rpm;
N 4 1000 rpm
N 2 630 rpm;
N 5 1250 rpm
N 3 800 rpm;
N 6 1600 rpm
Since N 6 1600 rpm is the max. required speed,
Select the above speeds. (i.e., R 40 series
skipping 3 speeds).
by
Design of Speed Reducers (Gear Boxes) 4.29
Design of Transmission Systems
4.30
Structural Formula
Z32
P1
P2
Z P 1X 1, P 2X2
3 1,
1
st
Stage
2 3
nd
2
Stage
P1 3
X1 1
P2 2
X 2 P1 3
st
In 1 stage
3 represents - No. of speeds
1 represents - space between speeds
In the 2nd stage,
2 represents - No. of speeds
3 represents space between speeds
Ray Diagram:
No. of stages 2; so 3 vertical lines
No. of speeds 6; so 6 horizontal lines
Mark N 1 500 to N 6 1000 rpm in Ray diagram.
Take N max 1000 rpm and mark it as (B)
N min 500 rpm and mark it as (A)
Here space between A and B is 3 and no. of speeds
is 2 ie A and B.
Either
Nmax
Nip
2 or
Nmin
Nip
1
4
For 1st stage, the above condition need not be
checked. Select N input as N max for 1st stage.
For 2nd Stage
Select N input 800 rpm
N max 1000 rpm
Design of Speed Reducers (Gear Boxes) 4.31
1000
1.25 2
800
satisfies condition of mark N input 800 rpm
as C. Mark D and E so that CD and DE has 1 space
each.
Join DA 1 parallel to CA and
Join DB 1 parallel to CB
Similarly, join EA 2 parallel to CA
and join EB 2 parallel to CB
Similarly A1, A 2, B 1, B 2 are also marked.
Approximate No. of Gears Required
6 speeds - (3 2 ) = 23 2 10 gears
For 1st stage
No. of speeds required are ‘3’
No. of gears required are ‘6’.
For 2nd stage
Refer
Pg.No.4.13 for
finding no. of
gear
No. of speeds required are ‘2’
No. of gears required are ‘4’.
Calculation of No. of Teeth on Gear
Refer Kinematic Diagram
2nd Stage
1st pair Z 1 and Z 2 - Reducing speed
4.32
Design of Transmission Systems
4
Design of Speed Reducers (Gear Boxes) 4.33
6
8
9
*
7
*
*
5
10
1
2
*
3
*
4.34
Design of Transmission Systems
2nd pair Z 3 and Z 4 - Increasing speed
Assume Z 1 20 teeth driver
1st Pair: (Reducing speed)
Z 1 No. of teeth on driver 20 teeth
N 1 Speed of driver 800 rpm
Z 2 No. of teeth on driven
N 2 Speed of driven 500 rpm
Z2
Z1
N1
N2
No. of teeth on driven
Sp eed o f driver
No. of teeth o n driver Speed of driven
Z2
20
800
500
Z 2 32 teeth
Z1 20 teeth
Z2 32 teeth
2nd Pair: (Increasing speed)
Z 3 No. of teeth on driver
N 3 Speed of driver 800 rpm
Z 4 No. of teeth on driven
N 4 Speed of driven 1000 rpm
Since centre distance is same,
Design of Speed Reducers (Gear Boxes) 4.35
Z 1 Z 2 Z 3 Z 4 20 32 52
Z 3 Z 4 52
... (1)
No. of teeth on driven Speed of driver
No. of teeth on driver Speed of driven
Z4
Z3
800
0.8
1000
Z 4 0.8Z 3
... (2)
Substitute the value of Z 4 in eq. (1)
Z 3 0.8Z 3 52
Z3
52
28.88
1.8
Z 3 29 teeth
But Z 3 Z 4 52
Z 4 52 29
N14 driver speed 355 rpm
N13 driven speed 224 rpm
23 teeth
Z3 29 teeth
Z4 23 teeth
1st Stage
1st Pair: Z 5 and Z 6 - Reducing speed
2nd Pair: Z 7 and Z 8 - Increasing speed
3rd Pair: Z 9 and Z 10 - Intermediate speed.
4.36
Design of Transmission Systems
1st Pair: Reducing speed.
Z 5 No. of teeth on driver 20 (Assume)
N 5 Speed of driver 1600 rpm
Z 6 No. of teeth on driven
N 6 Speed of driven 800 rpm
Z6
Z5
N5
N6
Z 6 20
1600
40
800
Z5 20 teeth
Z6 40 teeth
2nd Pair: Increasing speed.
Z 7 No. of teeth on driver
Z 8 No. of teeth on driven
N 7 Speed of driver 1600 rpm
N 8 Speed of driven 1250 rpm
Since centre distance is same,
Z 5 Z 6 Z 7 Z 8 60
Z 7 Z 8 60
Z8
Z7
N7
N8
... (3)
Design of Speed Reducers (Gear Boxes) 4.37
Z8
1600
Z
1250 7
1.28Z 7
... (4)
Substitute the value of Z 8 in eq. (3)
Z 7 1.28 Z7 60
Z7
60
26.31
2.28
Z7 27 teeth
Take
But Z 7 Z 8 60
Z 8 60 27 33 teeth
Z7 27 teeth
Z8 33 teeth
3rd Pair: Intermediate speed
Z 9 No. of teeth on driver
Z 10 No. of teeth on driven
N 9 Speed of driver 1600 rpm
N 11 Speed of driven 1000 rpm
Since centre distance is same,
Z 5 Z 6 Z7 Z8 Z 9 Z 10 60
Z 9 Z 10 60
But,
Z 10
Z9
N9
N 10
Z 10
1600
Z
1000 9
... (5)
4.38
Design of Transmission Systems
1.6 Z 9
Substitute the value of Z 10 in eq. (5)
Z 9 1.6 Z 9 60
Z9
Take
60
23.07
2.6
Z 9 23 teeth
Z 10 60 23 37 teeth
Z9 23 teeth
Z10 37 teeth
No. of teeth on each gear
II Stage
I Stage
Z 1 20
Z 5 20
Z 2 32
Z 6 40
Z 3 29
Z 7 27
Z 4 23
Z 8 33
Z 9 23
Z 10 37
Check
To avoid interference
Z 7 Z 5 and Z 7 Z9 4
27 20 7 and 27 23 4
... (6)
Design of Speed Reducers (Gear Boxes) 4.39
The condition is satisfied. Therefore, the calculation
of No. of teeth on each gear is satisfactory.
Problem 4.3: Design a 9 speed gear box for a milling
machine with speeds ranging from 56 - 900 rpm. The input
speed is 720 rpm; Make a neat sketch of the gear box. Indicate
the No. of teeth on all the gears and their speeds. (Apr. 2008)
Given Data:
No. of speeds Z 9
Max. speed N max 900 rpm
Min. speed N min 56 rpm
Input speed 720 rpm
N max
N min
Z 1
900
9 1
56
1
900 8
56
1.415
1.415 is not a standard step ratio.
Trail 1
Consider R20 series, which is having Step ratio
1.12.
1.12
1.12 1.12 1.40
Skip 2 speeds
Try R20 series by skipping (2) speeds.
4.40
Design of Transmission Systems
C2
N 9 = 9 00 rp m
In pu t (N ) =7 20 rp m
C1
F
N 7 = 4 50 rp m
C
E
B2
D
B1
B
A2
A1
3 (1)
3 (3)
Ray D iagram fo r Nine S peed Gear Box
N 8 = 6 30 rp m
A
N 6 = 3 15 rp m
N 5 = 2 24 rp m
N 4 = 1 60 rp m
N 3 = 112 rpm
N 2 = 8 0 rpm
N 1 = 5 6 rpm
10
12
11
9
7
8
6
5
4
3
1
2
Design of Speed Reducers (Gear Boxes) 4.41
Design of Transmission Systems
4.42
N 1 56 rpm;
N 4 160 rpm;
N 7 450 rpm
N 2 80 rpm;
N 5 224 rpm;
N 8 630 rpm
N 3 112 rpm;
N 6 315 rpm;
N 9 900 rpm
Since N 9 900 rpm is the maximum required speed,
therefore select the above speeds from N 1 to N9, according
to R20 series by skipping 2 speeds.
Structural Formula
Z33
P1 P2
Z P 1X 1, P 2X2
31,
1
st
Stage
33
2
nd
Stage
st
P1 3
X1 1
P2 3
X2 P1 3
In 1 stage,
3 represents No. of speeds
1 represents space between speeds
In 2nd stage,
3 represents no of speeds
3 represents space between speeds
Ray Diagram
Mark N 1 to N 9 in Ray diagram.
No. of stages is 2, so draw 3 vertical lines.
No. of speeds is 9, so draw 9 horizontal lines.
For 2nd stage,
Mark A in N 1 56 rpm. Mark B in N 4 160 rpm after
leaving 3 spaces.
Similarly mark C in N 7 450 rpm after leaving 3
spaces.
Design of Speed Reducers (Gear Boxes) 4.43
Select input speed
N max
N i p
Select N ip 224 rpm
2
and
450
2
224
N min
N ip
1
4
56
0.25
224
Since condition is satisfying,
Select N ip 224 rpm. So mark D accordingly.
Join AD, BD and CD
For 1st stage, no need to check the condition.
Then mark E and F after leaving 1 space in between
D, E and F.
Join D, E and F with input speed 720 rpm.
Joint EA 1 (Parallel to DA ) EC 1 (Parallel to DC ) - Join
FA 2 (Parallel to DA ) and FC 2 (parallel to DC )
Approximate No. of Gears Required
Refer Page 4.13 for details
9 speed 3 3 23 3 12 gears
For 1st stage,
No. of speeds required are 3.
No. of gears required are 6.
For 2nd stage,
No. of speeds required are 3.
No. of gears required are 6.
4.44
Design of Transmission Systems
Calculation of No. of Teeth on Gear
Refer kinematic diagram.. (Here after words, to
calculate no. of teeth on all gears, the kinematic diagram
should be referred.
II Stage
1st Pair - Z 1 and Z 2 - Reducing speed
2nd Pair - Z 3 and Z 4 - Increasing speed
3rd Pair - Z 5 and Z 6 - Intermediate speed.
1st Pair: Reducing speed Z 1 and Z 2
Z 1 No. of teeth on driver 20 teeth (Assume)
Z 2 No. of teeth on driven
N 1 Speed of the driver 224 rpm
N 2 Speed of driven 56 rpm
No. of teeth on driven Speed of the driver
No. of teeth on driver Speed of the driven
Z2
Z1
N1
N2
Z 2 20
224
80
56
Z1 20 teeth
Z2 80 teeth
2nd Pair: Increasing speed Z 3 and Z 4
Z 3 No. of teeth on driver
Design of Speed Reducers (Gear Boxes) 4.45
Z 4 No. of teeth on driven
N 3 Speed of driver 224 rpm
N 4 Speed of driven 450 rpm
Z4
Z3
N3
N4
224
0.4977
450
Z 4 0.4977Z 3
Since centre distance is same,
Z 1 Z 2 Z3 Z 4 20 80 100
Z 3 Z 4 100
Z 3 0.4977 Z 3 100
Z3
100
1.4977
66.76
Take
Z 3 67 teeth
Z 4 100 67 33 teeth
Z3 67 teeth
Z4 33 teeth
3rd Pair: Intermediate speed. Z 5 and Z 6
Z 5 No. of teeth on driver
Z 6 No. of teeth on driven
... (1)
4.46
Design of Transmission Systems
N 5 Speed of driver 224 rpm
N 6 Speed of driven 160 rpm
Z6
Z5
Z6
Z5
N5
N6
224
160
1.4
Z 6 1.4Z 5
Z 5 Z 6 100
3
4
Since the centre distance is same,
Z 1 Z 2 Z 3 Z 4 Z 5 Z 6 20 80 100
From eq. (3) and (4)
Z 5 1.4Z 5 100
Z5
Take
100
41.66
2.4
Z 5 42 teeth
Z 6 100 42 58 teeth
Z5 42 teeth
Z6 58 teeth
2nd Stage
To check interference
Z 1 20 teeth
Z 1, Z 3, Z5 are driver.
Z 2 80 teeth
Z 3 Z1
Z 3 67 teeth
and
4
Z 3 Z5
Z 4 33 teeth
Design of Speed Reducers (Gear Boxes) 4.47
Z 5 42 teeth
67 20 47
4
67 42 25
Z 6 58 teeth
There is no interference.
1st Stage
1st Pair - Z 7 and Z 8 - Reducing speed
2nd Pair - Z 9 and Z 10 - Increasing speed
3rd Pair - Z 11 and Z 12 - Intermediate speed.
1st Pair: Z 7 and Z 8 - Reducing speed.
Z 7 No. of teeth on driver 20 teeth (Assume)
Z 8 No. of teeth on driven
N 7 Speed of driver 720 rpm
N 8 Speed of driven 224 rpm
No. of te eth on driven Speed of driver
No . of teeth on driver Speed of driven
Z8
Z7
N7
N8
Z 8 20
720
64.28
224
Z 8 65 teeth
Z7 20 teeth
Z8 65 teeth
4.48
Design of Transmission Systems
2nd Pair: Z 9 and Z 10 - increasing speed.
Z 9 No. of teeth on driver
Z 10 No. of teeth on driven
N 9 Speed of driver 720 rpm
N 10 Speed of driven 450 rpm
Since the centre distance is same,
Z 7 Z 8 Z 9 Z 10 20 65 85
Z 9 Z 10 85
Z 10
But,
Z9
N9
N 10
720
1.6
450
Z 10 1.6 Z 9
From eq. (5) and (6)
Z 9 1.6Z 9 85
Z9
Take
... (5)
85
32.69
2.6
Z 9 33 teeth
Z 10 85 33 52 teeth
Z9 33 teeth
Z10 52 teeth
3rd Pair: Z 11 and Z 12 - intermediate speed.
Z 11 No. of teeth on driver
Z 12 No. of teeth on driven
N 11 Speed of driver 720 rpm
N 12 Speed of driven 315 rpm
... (6)
Design of Speed Reducers (Gear Boxes) 4.49
Since centre distance is same,
Z 7 Z 8 Z 9 Z 10 Z 11 Z 12 85
Z 11 Z 12 85
But,
Z 12
Z 11
N 11
N 12
... (7)
720
2.285
315
Z 12 2.285 Z 11
... (8)
From eq. (7) and (8)
Z 11 2.285 Z 11 85
Z 11
Take
85
25.87
3.285
Z 11 26 teeth
Z 12 85 26 59 teeth
Z11 26 teeth
Z12 59 teeth
1st Stage
Z 7 20 teeth
Z 8 65 teeth
Similarly,
Z 7, Z 9, Z11 are driver gears.
Z 9 32 teeth
Z 10 52 teeth
Check for interferen ce,
Z 11 26 teeth
Z9 Z7
4
Z 9 Z 11
Z 12 59 teeth
32 20 12
4 Since both
32 26 6
are greater than four.
There is no interference.
4.50
Design of Transmission Systems
Problem 4.4: A gear box is to give 18 speeds for a spindle
of a milling machine. The drive is from an electric motor of
3.75 kW at 1440 rpm. Maximum and minimum speeds of the
spindle are to be around 650 rpm and 35 rpm respectively.
Find the speed ratios which will give the desired speeds and
draw the structural diagram and kinematic arrangement of the
drive.
(Apr. 2007)
Solution:
N max
N min
Z 1
650
18 1
35
650
Step ratio
35
1
17
N max 650 rpm
N min 35 rp m
Z 18
1.1875
Trail 1
R40 series
1.06
1.06
1.06 1.06
skip 2 speeds
1.191
which is approximately equal to the required step ratio.
Skip two speeds
Design of Speed Reducers (Gear Boxes) 4.51
N 1 35.5 rpm
N 9 140 rpm
N 17 560 rpm
N 2 42.5 rpm
N 10 170 rpm
N 18 670 rpm
N 3 50 rpm
N 11 200 rpm
Since N 18 is closer to the
N 4 60 rpm
N 12 236 rpm
required N max ,
N 5 71 rpm
N 13 280 rpm
N 6 85 rpm
N 14 335 rpm
N 7 100 rpm
N 15 400 rpm
N 8 118 rpm
N 16 475 rpm
Structural formula,
No. of speeds required Z 18
332
P1
P2
P3
Speeds
Space intervals
P1 3
X1 1
P2 3
X 2 P1 3
P3 2
X 3 P1 P 2 3 3 9
Structural formula P 1X 1, P 2X 2, P 3X3
33,
31 ,
1
st
Stage
nd
2
Construction of Ray Diagram
For Third Stage
To find N input ,
Let N ip 100 rpm
and
2 9
rd
Stage 3
Stage
N min
1
4
N i/p
35.5
0.355 0.25
100
4.52
I
Design of Transmission Systems
In pu t
N 1 8 = 67 0
N 1 7 = 56 0
N 1 6 = 47 5
N 1 5 = 40 0
N 1 4 = 33 5
E
N 1 3 = 28 0
H
N 1 2 = 23 6
G
N 11 = 200
F
B
N 1 0 = 17 0
D
N 9 = 1 40
N 8 = 118
N 7 = 1 00
C
N6 = 85
N5 = 71
N4 = 60
N3 = 50
N 2 = 4 2.5
1 st Sta ge . 3 (1)
2 nd S tage . 3 (3)
3 rd Sta ge . 2 (9)
Ray D iagram fo r 18 Speed Gear Box.
A
N 1 = 3 5.5
(236 rpm )
Z 16 =1 08
14
13
11
Z 1 4 =10 4
(2 80 rpm )
15
8
9 7
5
6
D riven
D river
(200 rpm )
Z 6 = 40
(100 rp m)
Z 7 =35
Z 5 =2 0
Z 8 = 25
Z 10 = 32
(280 rpm )
(170 rpm )
10
Z 9 =28
II S tage
Z1 = 20
Z 4 = 28
(170 rpm )
D rive n
Z 3 =4 9
Z 2 = 57
(35.5 rpm )
D river
(100 rpm )
III Stag e
*
*
Kinem atic Arrangement of 18 Speed Gear Bo x.
Z 1 2 = 114
(236 rpm )
12
Z 11 =3 4
*
*
*
D riven
16
Z 13 =44
*
*
*
I Stage
D rive r
(67 0 rpm )
Z 15 =40
Design of Speed Reducers (Gear Boxes) 4.53
4.54
Design of Transmission Systems
Nmax
Nip
N max
Nip
2
170
1.7 2
100
From 100 rpm, leave 9
spaces and mark
N max 170 rpm
Select N ip as 100 rpm; and mark it as (C)
Take 9th speed as
N max 170 rpm and mark as (B)
Take the 1st speed
N min 35.5 rpm and mark as (A)
For Second Stage
To find N input ,
Let N ip 200 rpm
N max
Ni p
280
1.4 2
200
and
N min
N i/p
100
0.5 0.25
200
Mark N max as (E)
Select N ip as 200 rpm; and mark it as (F).
Similarly mark (D) at the midpoint of (E) and (C). (or)
Mark D after leaving 3 spaces from C and mark E after
leaving 3 spaces from D .
Approximate No. of Gears required
18 speeds 3 3 2 23 3 2 16 gears
For 1st Stage
No. of speeds required are 3,
Design of Speed Reducers (Gear Boxes) 4.55
No. of gears required 6; [i.e. 2 3 6]
For details, refer page 4.13 table 4.2
For 2nd Stage
No. of speeds required are 3,
No. of gears required 6; [i.e. 2 3 6]
For 3rd Stage
No. of speeds required are 2,
No. of gears required 4; [i.e. 2 2 4]
Calculation of No. of Teeth on Each Gear
Refer Kinematic Arrangement
For III Stage
1st Pair Z 1 and Z 2 - Reducing speed.
2nd Pair Z 3 and Z 4 - Increasing speed.
1st Pair: Reducing speed. Z 1 and Z 2
Z 1 No. of teeth on driver 20 teeth (Assume)
N 1 speed of driver 100 rpm
Z 2 No. of teeth on driven
N 2 speed of driven 35.5 rpm
Speed ratio
Z2
Z1
Z 2 20
N1
N2
100
56.3
35.5
Z1 20 teeth
4.56
Design of Transmission Systems
Take Z 2 57 tee th.
Z2 57 teeth
2nd Pair: Increasing speed Z3 and Z4
Z 3 No. of teeth on driver
Z 4 No. of teeth on driven
N 3 Speed of driver 100 rpm
N 4 Speed of driven 170 rpm
Since the centre distance is same,
Z 1 Z 2 Z 3 Z4 57 20
Z 3 Z 4 77
But, speed ratio
Z4
Z3
Z4
Z3
... (1)
N3
N4
100
0.5882
170
Z 4 0.5882 Z 3
From eq. (1) and (2)
Z 3 0.5882 Z 3 77
Z3
77
48.48
1.5882
Take Z 3 49 teeth
Z 4 77 49 28
Z3 49 teeth
Z4 28 teeth
... (2)
Design of Speed Reducers (Gear Boxes) 4.57
For II Stage
3 speeds - 3 pairs of gears.
1st Pair - Z 5 and Z 6 - Reducing speed
2nd Pair - Z 7 and Z 8 - Increasing speed
3rd Pair - Z 9 and Z 10 - Intermediate speed.
1st Pair Z5 and Z6: Reducing speed.
Z 5 No. of teeth on driver 20 teeth (Assume)
Z 6 No. of teeth on driven
N 5 Speed of driver 200 rpm
N 6 Speed on driven 100 rpm.
Speed ratio
Z6
Z5
N5
N6
200
2
100
Z 6 20 2 40 teeth
Z5 20 teeth
Z6 40 teeth
2nd Pair Z7 and Z8: Increasing speed.
Z 7 No. of teeth on driver
Z 8 No. of teeth on driven
N 7 Speed of driver 200 rpm
N 8 Speed of driven 280 rpm
Since the centre distance is same.
Z 5 Z 6 Z 7 Z8 20 40 60
Z 7 Z 8 60
... (3)
4.58
Design of Transmission Systems
But, speed ratio
Z8
Z7
N7
N8
200
0.7142
280
Z 8 0.7142 Z 7
... (4)
From eq. (3) and (4)
Z 7 0.7142 Z 7 60
Z7
Take
60
35.001
1.7142
Z 7 35 teeth
Z 8 60 35 25
Z7 35 teeth
Z8 25 teeth
3rd Pair Z9 and Z10: Intermediate speed.
Z 9 No. of teeth on driver
Z 10 No. of teeth on driven
N 9 Speed of driver 200 rpm
N 10 Speed of driven 170 rpm
Since the centre distance is same,
Z 9 Z 10 Z 5 Z 6 Z 7 Z 8 20 40 60
Z 9 Z 10 60
Speed ratio,
... (5)
Z 10
Z9
N9
N 10
200
1.176
170
Z 10 1.176 Z9
From eq. (5) and (6)
... (6)
Design of Speed Reducers (Gear Boxes) 4.59
Z 9 1.176 Z9 60
Z9
Take,
60
27.57
2.176
Z 9 28 teeth
Z 10 60 28 32 teeth
Z9 28 teeth
Z10 32 teeth
To avoid interference,
Z 5, Z 7 and Z 9 are driver gears with Z 5 20 teeth
Z 7 35 teeth and
Z 9 28 teeth
Condition
Z7 Z5 4
35 20 15
and Z 7 Z 9 4
35 28 7
Both are greater than 4.
There is no interference between gears.
Z5 20 teeth;
Z7 35 teeth;
Z9 28 teeth
Z6 40 teeth;
Z8 25 teeth;
Z10 32 teeth
I Stage
In first stage, the No. of speeds required are 3.
Therefore, six gears are required.
i.e., 3 pairs of gears.
1st Pair: Z 11 and Z 12 - Reducing speed
2nd Pair: Z 13 and Z 14 - Increasing speed
4.60
Design of Transmission Systems
3rd Pair: Z 15 and Z 16 - Intermediate speed
1st Pair: Z 11 and Z 12 - Reducing speed.
Z 11 No. of teeth on driver 17 teeth (Assume)
Z 12 No. of teeth on driven
N 11 speed of driver 670 rpm
N 12 speed of driven 200 rpm
Speed ratio
Z 12
Z 11
N 11
N 12
670
200
Z 12 17
670
56.95 57 teeth
200
Take Z12 57 teeth
and Z11 17 teeth
2nd Pair: Z 13 and Z 14 - Increasing speed.
Z 13 No. of teeth on driver
Z 14 No. of teeth on driven
N 13 Speed of driver 670 rpm
N 14 Speed of driven 280 rpm
Since the centre distance is same,
Z 13 Z 14 Z 11 Z 12 17 57 74
Z 13 Z 14 74
But, speed ratio
... (7)
Z 14
Z 13
N13
N 14
670
280
Z 14 2.3928Z 13
... (8)
Design of Speed Reducers (Gear Boxes) 4.61
From eq. (7) and (8)
Z 13 2.3928Z 13 74
Z 13
74
21.81
3.3928
Take
Z 13 22 teeth
and
Z 14 74 22 52 teeth
Z13 22 teeth
Z14 52 teeth
3rd Pair: Z 15 and Z 16 - Intermediate speed.
Z 15 No. of teeth on driver
Z 16 No. of teeth on driven
N 15 Speed of driver 670 rpm
N 16 Speed of driven 236 rpm
Since the centre distance is same,
Z 15 Z 16 Z 11 Z 12 Z 13 Z 14 74
Z 15 Z 16 74
But, speed ratio
... (9)
Z 16
Z 15
N15
N 16
670
236
Z 16 2.8389Z 15
From eq. (9) and (10)
Z 15 2.8389Z 15 74
... (10)
4.62
Design of Transmission Systems
Z 15
Take
74
19.27
3.8389
Z 15 20 teeth
From equation (1)
Z 16 74 20 54 teeth
Z15 20 teeth
Z16 54 teeth
To Avoid Interference
Z 13 Z 11 4;
i.e., 22 17 5
and Z 13 Z 15 4;
i.e.,22 20 2
Since the difference between No. of teeth on Gear 13
and Gear 15 are less than 4, then multiply all the gears
in the 1st stage by 2.
Modify
the
No.
of
teeth
Z 11 to Z16), multiplying by 2
Z 11 17 2 34 teeth
Z 12 57 2 114 teeth
Z 13 22 2 44 teeth
Z 14 52 2 104 teeth
Z 15 20 2 40 teeth
Z 16 54 2 108 teeth
Check again,
on
each
gear
(from
Design of Speed Reducers (Gear Boxes) 4.63
Z 13 Z 11 44 34 10
Z 13 Z 15 44 40 4
Since
the
difference
between
Z 13 and Z 11 ,
Z 13 and Z 15 is greater than 4, our calculation is correct.
Therefore, the No. of teeth on each gear are given
here.
3rd Stage
Z 1 20 teeth
Z 2 57 teeth
Z 3 49 teeth
Z 4 28 teeth
2nd Stage
Z 5 20 teeth
Z 6 40 teeth
Z 7 35 teeth
1st Stage
Z 11 34 teeth
Z 12 104 teeth
Z 13 44 teeth
Z 8 25 teeth
Z 14 104 teeth
Z 9 28 teeth
Z 15 40 teeth
Z 10 32 teeth
Z 16 108 teeth
Problem 4.5: Design a 9 speed gear box to give output speeds
between 280 and 1800 rpm. The input power is 5.5 kW at
1400 rpm. Draw the kinematic layout diagram and the speed
diagram. Determine the number of teeth on all gears.
4.64
Design of Transmission Systems
Given Data
N min 280 rpm ;
N max 1800 rpm ;
P ower 5.5 kW;
Z 9 speed
Solution
We know that
N max
N min
Z 1
1800
9 1
280
1.26
Since the obtained is not a standard speed ratio
take 1.06 R40 series 1.06 1.06 1.06 1.06 1.26
Skip 3 speeds, which is approximately equal to the
required value.
Try R40 series by skipping 3 speeds; From Pg.No. 7.20
N 1 280 rpm; N 2 355 rpm, N 3 450 rpm;
N 4 560 rpm; N 5 710 rpm, N 6 900 rpm;
N 7 1120 rpm; N 8 1400 rpm; N 9 1800 rpm
Structural formula
Z33 ;
P1 3 ;
X1 1
9 P 1, P 2 ;
P2 3 ;
X2 P1 3
P1 X 1, P 2 X 2
9 3 1, 3 3
Since number of stages u 2 ,
Draw u 1 2 1 3 vertic al lines
Sinc e 9 speeds, draw 9 ho rizo ntal lines
Design of Speed Reducers (Gear Boxes) 4.65
Procedure for constructing speed diagram
At 280 rpm (min), Locate A.
Leave 3 intervals at 560 rpm mark B, again
Leave 3 intervals at 1120 rpm, mark C
Locate input speed at point D
N max
N input
2
Selecting N input 710 rpm
N max
N input
N m ax
N input
1120
1.57 2
710
280
1
0.39
710
4
After locating point ‘D’, at 900 mark E and again interval
at 1120, mark F.
Select Input speed as 1400 rpm.
Calculation of number of Teeth
II stage I pair
Speed of driven N 11 Z 12
Speed of driver N12 Z 11
Assume
Z11 20 teeth
Z 12
20
710
52 teeth
Z12 50.71 ~
280
II stage II pair
Since
Z7
Z8
N8
N7
560
0.788
710
4.66
Design of Transmission Systems
Speed D iag ram or Ray D iagram of 9 speed gear bo x
Design of Speed Reducers (Gear Boxes) 4.67
4.68
Design of Transmission Systems
also Z 7 0.788 Z8
Since
Z 7 Z 8 Z 11 Z12
0.788 Z 8 Z 8 20 52 Z8 40 teeth
Z7 32 teeth
II stage, III pair
Z9
Since
Also
Z 10
N 10
N9
Z9
1120
1.57 Z 9 1.57 Z 10
Z 10
710
Z 9 Z 10 Z11 Z12
1.57 Z 10 Z 10 20 52 Z10 28 teeth
and Z9 44 teeth
I stage, I pair
Assume Z5 20 teeth
Since
Z5
Z6
N6
N5
710
0.507 Z6 40 teeth
1400
900
0.64 Z1 0.64 Z 2
1400
I stage II pair
Since
also
Z1
Z2
N1
N2
Z 1 Z 2 Z 5 Z6
0.64 Z 2 Z 2 20 40 ; Z2 37 teeth
and
Z1 24 teeth
Design of Speed Reducers (Gear Boxes) 4.69
I stage III pair
Since
Z3
Z4
N4
N3
1120
Z3 0.8 Z 4
1400
But
Z 3 Z 4 Z 5 Z6
0.8 Z 4 Z 4 20 40
Z4 34 teeth
a nd Z3 28 teeth
Problem 4.6: The maximum and minimum speeds of nine
speed gear box are to be 600 rpm and 100 rpm respectively.
The drive is from an electric motor giving 3 kW at 1440 rpm.
Design the gear box. Construct the speed diagram and sketch
the arrangement of gear box.
Solution
N max 600 rpm, Nmin 100 rpm; P 3 kW ; Z 9,
N input 1440 rpm
We know that
N max
N min
Z 1
600
9 1
100
8 6 6 1/8
1.25
The progression ratio 1.25 , coincides with the R10
series standard progression ratio
4.70
Design of Transmission Systems
Therefore select R10 series speeds
N 1 100 rpm; N 2 125 rpm; N 3 160 rpm;
N 4 200 rpm; N 5 250 rpm; N 6 315 rpm;
N 7 400 rpm; N 8 500 rpm; N 9 600 rpm;
Structural formula
Z33
9 P 1, P 2
P 1 X 1, P 2 X2
P 1 3, X 1 1
P 2 3, X 2 3
9 3 1, 3 3
u no . o f stages 2
draw u 1 2 1 3 vertical lines
since 9 speeds, draw 9 horizontal lines
Procedure for the construction of ray diagram
2nd Stage: 3 speeds, 3 spaces
At 100 rpm (min), locate point A
Leave 3 intervals, at 200 rpm, mark point B
Again leave 3 intervals, at 400 rpm, mark point C
Point
“C”
represents
represents N min 100 rpm
N max 400 rpm ,
Point
“A”
Design of Speed Reducers (Gear Boxes) 4.71
Let N input 250 rpm.
N max
N input
Select
N input 250
and
2
400
1.6 2
250
N min
N input
1
0.25
4
100
0.4 0.25
250
Selection of N input 250 is satisfactory and mark
it as D , similarly mark E and F above
Kinematic diagram:
No. of gears required 2 3 3 12
Calculation of No. of Teeth on gear
II stage
1st pair - (Z 1 and Z 2) - Reducing speed
2nd pair - (Z 3 and Z 4) - Increasing speed
3nd pair - (Z 5 and Z 6) - Intermediate speed
II stage
1st pair reducing speed (Z 1 and Z 2)
Let
Z 1 No of teeth on driver 20 teeth Assume
4.72
Design of Transmission Systems
Driver 600rpm
F ig. Kin em atic A rrang em ent
D riven
Driven
D river 250rpm
Design of Speed Reducers (Gear Boxes) 4.73
4.74
Design of Transmission Systems
Z 2 No of teeth on driven
N 1 Speed of the driver 250 rpm
N 2 Speed of the driven 100 rpm
No. of teeth on driven Speed of the driver
No. of teeth on driver Speed of the driven
Z2
Z1
Z2
N1
N2
N1
N2
Z1
250
20
100
Z 2 50
Z1 20 teeth, Z 2 50 teeth
2nd pair Increasing speed (Z 3 and Z 4)
Z 3 no. of teeth on driver
Z 4 no. of teeth on driven
N 3 speed of driver 250
N 4 speed of driven 400
Z4
Z3
Z4
N3
N4
N3
N4
Z3
Design of Speed Reducers (Gear Boxes) 4.75
Z4
250
Z 0.625 Z 3
400 3
Z 4 0.625 Z3
Since centre distance is same
Z1 Z2 Z3 Z4
Z 3 Z 4 20 50 70
Z 3 Z 4 70
Z 3 0.625 Z 3 70
Z3 43.07 44 teeth
and Z4 26 teeth
3rd pair: Intermediate speed (Z 5 and Z 6)
Z6
Z5
N5
N6
250
200
Z 6 1.25 Z 5
Since centre distance is same
Z 1 Z 2 Z3 Z 4 Z 5 Z 6 20 50 70
Z 5 Z 6 70
Z 5 1.25 Z 5 70
Z5 31.11 32 teeth
Z 6 70 32
Z 6 38 teeth
4.76
Design of Transmission Systems
II stage
Z 1 20 teeth; Z 4 26 teeth
Z 2 50 teeth; Z 5 32 teeth
Z 3 44 teeth; Z 6 38 teeth
To check interference:
Z 1, Z 3, Z 5 are driver
Z3 Z1
4
a nd
Z Z
5
3
44 20
and 4
44 32
There is no interference
I stage
1st pair - (Z7 and Z8) - Reducing speed
2nd pair - (Z9 and Z10 ) - Increasing speed
3rd pair - (Z11 and {Z 12 ) -Intermediate speed
1st pair
Z7 No . of teeth on driver 20 teeth Assume
Z8 No. of teeth on driven
N7 Speed of driver 600 rpm
N8 Speed of driven 250 rpm
Design of Speed Reducers (Gear Boxes) 4.77
Z8
Z7
N7
N8
Z8 20
600
48 teeth
250
Z7 20 teeth
Z8 48 teeth
2nd pair
Z9 No. of teeth on driver
Z10 No. of teeth on driven
N9 Speed of driver 600 rpm
N10 Speed of driven 400 rpm
Since the centre distance is same
Z7 Z 8 Z 9 Z 10 20 48 68 teeth
Z 9 Z 10 68 teeth
But
Z10
Z9
Z 10
N9
N 10
600
Z 9 1.5 Z 9
400
Z10 1.5 Z 9
Z 9 1.5 Z9 68
Z9 27.2 28 teeth
and Z10 40 teeth
4.78
Design of Transmission Systems
3rd pair
Z11 No. of teeth on driver
Z12 No. of teeth on driven
N11 Speed of driver 600
N12 Speed of driven 315
Since the centre distance is same
Z7 Z 8 Z 9 Z 10 Z 11 Z 12 68
Z 11 Z 12 68
But
Z12
Z 11
N 11
N 12
600
315
Z 12 1.9 Z 11
Z 11 1.9 Z 11 68
Z11 23.44 24 teeth
and
Z12 44 teeth
Checking of interference
Z9 Z7
4
and
Z Z
11
9
28 20
28 24 4
There is no interference
Design of Speed Reducers (Gear Boxes) 4.79
Problem 4.7: A machine tool gear box is to have 9 speeds. The
gear box is driven by an electric motor whose shaft rotational
speed is 1400 rpm. The gear box is connected to the motor by a
belt drive. The maximum and minimum speeds required at the
gear box output are 1000 rpm and 200 rpm respectively. Suitable
speed reduction can also be provided in the belt drive. What is
the step ratio and what are the values of 9 speeds? Sketch the
arrangement., Obtain the number of teeth on each gear and also
the actual output speeds.
Given Data
No. of speeds Z 9
Maximum speed N max 1000 rpm
Minimum speed N min 200 rpm
Solution
We know
N max
N min
Z 1
8
1000
1.22
200
which is not a standard step ratio
Trail 1
Take R40 series multiples 1.06
1.06 1.06 1.06 1.06
1.26
which is greater than required
not satisfactory
(Nov/Dec 2007)
4.80
Design of Transmission Systems
To obtain speeds (approximate method)
N 1 200 rpm
N 2 N 1 200 1.22 244 rpm
298 rp m
N 3 N 2 244 1.22 297.68 ~
364 rp m
N 4 N 3 298 1.22 363.56 ~
444 rp m
N 5 N 4 364 1.22 444.08 ~
542 rp m
N 6 N 5 444 1.22 541.68 ~
662 rp m
N 7 N 6 542 1.22 661.24 ~
N 8 N 7 662 1.22 807.64 ~
808 rpm
N 9 N 8 808 1.22 985.76 ~
986 rp m
Structural formula
Z33
P1 3 ; P2 3
and X1 1 ; X 2 P 1 3
Z P 1 X 1, P 2 X 2
3 1, 3 3
Ray diagram
Select input speed;
N max
N input
Select N input 444 rp m
2 and
N min
Ninput
4
Design of Speed Reducers (Gear Boxes) 4.81
N min
200 1
Nmax 662
2 and
N inp ut 444
N input 444 4
since condition is satisfying
Mark N input 444 rpm as D, and similarly mark E
and F .
Approximate number of gears required
9 speed 3 3 2 3 3 12 gears
Calculation of No. of teeth on gear
Let Z1 No. of teeth on driver 20 teeth Assume
Z2 No. of teeth on driven
N 1 Speed of the drive r 444 rpm
N 2 Speed of driven 200 rpm
We know that
Z2
Z1
N1
N2
Z2 Z 1
N1
N2
20
444
45 teeth
200
Z1 20 teeth, Z2 45 teeth
Similarly,
Z4
Z3
N3
N4
444
Z4 Z 3
662
Z4 0.671 Z 3
Since centre distance is same
4.82
Design of Transmission Systems
G
1400 rpm
986 rpm
C2
808 rpm
C1
F
C
B2
E
662 rpm
542 rpm
B1
D
444 rpm
364 rpm
B
A2
298 rpm
A1
244 rpm
3(1)
Ray D iag ram
3(3)
A
200 rpm
D riven
D riven
Design of Speed Reducers (Gear Boxes) 4.83
4.84
Design of Transmission Systems
Z 1 Z 2 Z3 Z 4
Z 3 Z 4 20 45
Z 3 Z 4 65
Z 3 0.671 Z 3 65
Z3 39 teeth
and
Z4 26 teeth
Similarly,
Z6
Z5
N5
N6
444
364
Z6 Z 5 1.2197
Since the centre distance is same
Z 1 Z 2 Z 3 Z4 Z 5 Z6 20 45 65
Z 5 Z 6 65
Z 5 1.2197 Z 5 65
Z5 30 teeth
and
Z 6 65 30 35
Z6 35 teeth
To check for interference
Z 1, Z 3, Z 5 are driver
Design of Speed Reducers (Gear Boxes) 4.85
Z3 Z1
and
4
Z3 Z5
39 20
39 30 4
There is no interference
Similarly,
Z7 N o . of teeth on driver 20 teeth Assume
Z8 No. of teeth on driven
N7 Speed of driver 1400 rpm
N8 Speed of driven 444 rpm
Z8
Z7
Z8
N7
N8
N7
N8
Z7 20
1400
444
64 teeth
Z7 20 teeth, Z8 64 teeth
Since the centre distance is same
Z 7 Z 8 Z9 Z 10 20 64 84
Z 9 Z 10 84
But
Z 10
Z9
N9
N 10
1400
2.11
662
... (1)
4.86
Design of Transmission Systems
Z 10 2.11 Z 9
... (2)
Z 9 2.11 Z 9 84
Z9 27 teeth
and
Z10 57 teeth
Since centre distance is same
Z 7 Z 8 Z 9 Z10 Z 11 Z 12 85
Z 11 Z 12 85
Z 12
But,
Z 11
N 11
N 12
1400
2.583
542
Z 12 2.583 Z 11
Z 11 2.583 Z 11 84
Z11 23 teeth
and
Z12 61 teeth
Check of interference
Z9 Z7
4
Z 11
Z9
27 20
27 23 4
Satisfactory, there is no interference
Problem 4.8: Design a nine-speed gear box for a machine to
provide speeds ranging from 100 to 1500 rpm. The input is
from a motor of 5 kW at 1440 rpm. Assume any alloy steel
for the gear.
(May/June 2007)
Design of Speed Reducers (Gear Boxes) 4.87
Given Data
No. of speeds Z 9
N max 1500 rpm
N min 100 rpm
P 5 kW
Solution
N max
N min
Z 1
Z 1
1500
1.40
100
1.40 is not a standa rd s tep ratio
Trial 1:
Consider R20 series, which is having step ratio 1.12
1.12 1.12 1.12 1.40
skip 2 speeds
(From P.S.G. Data book, Pg.No. 7.20)
Try R20 series by skipping (2) speeds
N 1 100 rpm; N 4 280 rpm; N 7 800
N 2 140 rpm; N 5 400 rpm; N 8 1000
N 3 200 rpm; N 6 560 rpm; N 9 1250
The obtained N 9 1250 N max hence the above trail
is not satisfactory.
To obtain speeds (Approximate method)
4.88
Design of Transmission Systems
N 1 100 rpm
N 2 N 1 140 rpm
N 3 N 2 196 rpm
N 4 N 3 274 rpm
N 5 N 4 384 rpm
N 6 N 5 538 rpm
N 7 N 6 753.2 rpm
N 8 N 7 1054 rpm
1500 rpm
N 9 N 8 1476 ~
Approximate method is satisfactory
Structural formula
Z 3 3 ; P1 3 ; X1 1
P2 3 ; X2 P1 3
Z P 1 X 1, P 2 X 2
3 1,
3 3
For second stage
Check for condition
N max
N input
Select Input 384 rpm
where,
N min 100 rpm
N max 753 rpm
2 and
N min
N input
1
4
Design of Speed Reducers (Gear Boxes) 4.89
753
1.96 2
384
N min
N i/p
100
0.26 0.25
384
Satisfies the c o nditio n and mark it as D.
N inp ut 384
Approximate Number of Gears
9 speed 3 3 and 2 3 3 12 gears
For I stage
No. of speeds required are 3
No. of gears required are 6
For II stage
No. of speeds required are 3
No. of gears required are 6
Calculation of Number of Teeth on gear
II stage
N1
N2
Z2
Z1
N 1 Speed of driver shaft 384
N 2 Speed of driven shaft 100
Assume Z 1 20 teeth
Z2
384
20 78 teeth
100
Z1 20, Z2 78 teeth
4.90
Design of Transmission Systems
1 44 0 rpm
1 50 0 rpm
1 0 5 4 rpm
7 53 rp m
C
F
5 38 rp m
E
3 84 rp m
D
2 74 rp m
B
1 96 rp m
1 40 rp m
1 00 rp m
3 (1)
3 (3)
Ray D iag ram
A
4
10
12
11
9
7
8
Kinem atic Diagram
6
5
3
1
2
Design of Speed Reducers (Gear Boxes) 4.91
Design of Transmission Systems
4.92
Z3 Z4 Z1 Z2
Z 3 Z 4 98
N3
N4
N3
N4
Z4
Z3
384
753
0.509
Z4 0.509 Z 3
Z3 0.509 Z 3 98
Z3 65 teeth
Z4 33 teeths
Z5
Z6
N6
N5
274 Z 5
Z 5 0.7135 Z6
384 Z 6
Also
Z 5 Z 6 Z3 Z4
Z 5 Z 6 98
0.7135 Z 6 Z 6 98 Z6 58 teeth
and Z5 40 teeth
To check interference
Z 1, Z3, Z 5 are driver
Design of Speed Reducers (Gear Boxes) 4.93
Z3 Z1
4
and
Z Z
5
3
there is no interferenc e
I stage
N8 Speed of driver shaft 1440 rpm
N7 Speed of driven shaft 384 rpm
Z7
Z8
Assume
N8
N7
Z7 20 teeths
Z 8 20
N7
N8
20
1440
75 teeth
384
and
Z7 20, Z8 75 teeth
Z9 Z 10 Z 7 Z 8 Z 9 Z 10 95 teeth
and
Z9
Z 10
N 10
N9
Z 9 Z10
Z 10
0.5229 Z 10 Z10 95
Z10 63 teeth
and
N 10
N9
753
0.5229 Z 10
1440
4.94
Design of Transmission Systems
Z9 32 teeth
Z 11
Z 12
N12
N 11
Z 11
Z12
538
Z 11 0.3736 Z 12
1440
and
Z 11 Z 12 Z 9 Z 10
Z 11 Z 12 95
Z12
95
70 teeth
1.3736
Z11 95 70 25
Check for interference
Z 7, Z 9, Z11 are driver gears
Z9 Z7
4
Z 9 Z 11
There is no interference
Problem 4.9: Design the layout of a 12 speed gear box for a
lathe. The minimum and maximum speeds are 100 and 1200
rpm. Power is 5 kW from 1440 rpm. Draw the speed and
kinematic diagram. Also calculate the number of teeth on all
gears.
(May/June 2013)
Given data
Z 12 ; Nmin 100 rpm ; Nmax 1200 rpm ; P 5 kW
Solution
Since
Nmax
N min
Z 1
Design of Speed Reducers (Gear Boxes) 4.95
1
1200 11
100
1.25
The progression ratio 1.25 , coincides R10 series.
From PSG Data book, Pg.No. 7.20
N1 100 rpm ;
N2 125 rpm;
N 3 160 rpm ;
N4 200 rpm;
N 5 250 rpm;
N 6 315 rpm;
N7 400 rpm;
N 8 500 rpm;
N 9 630 rpm
N10 800 rpm;
N 11 1000 rpm;
N 12 1250 rpm
Structural formula
Z322
P1 3 X1 1
12 P 1, P 2, P 3
P2 2 X2 P 1 3
P1 X 1, P 2 X 2, P 3 X 3
P3 2 X3 P1 P2 3 2 6
3 1, 2 3, 2 6
Since Number of stages = 3
draw u 1 3 1 4 vertical lines
Since 12 speeds, draw 12 horizontal lines three spaces
III stage, I pair
Since
Z 13
Z 14
N 14
N 13
Procedure for constructing speed diagram
At 100 rpm (min) Locate A, at sixth intervals at
400 rpm and mark as B.
4.96
Design of Transmission Systems
STAG E 1
STAG E 2
STAGE 3
Design of Speed Reducers (Gear Boxes) 4.97
4.98
Design of Transmission Systems
Let N input 250
Sinc e
and
N min
N input
N max
N input
100
1
0.4
250
4
400
1.6 2
250
Select input 250 rpm and mark C.
III stage, I pair
Assume Z13 20 teeth
Z 14 Z 13
N 13
N 14
20
250
Z14 50 teeth
100
III stage, II pair
Z 11
Z 12
N 12
N 11
Z 11
Z 12
400
Z 11 1.6 Z 12
250
Also Z 11 Z 12 70
1.6 Z 12 Z 12 70
Z12 27 teeth
and Z11 43 teeth
Mark N max 500 in II stage as (D)
Input speed in II stage (E) 400 rpm
N min C
II stage, I pair
Since
also
Z7
Z8
N8
N7
500
400
Z7 1.25 Z 8
Z 7 Z 8 Z9 Z10 52
Design of Speed Reducers (Gear Boxes) 4.99
1.25 Z 8 Z 8 52
Z8 24 teeth and Z7 28 teeth
III stage, II pair
Since
Z9
Z 10
N 10
N9
Assume Z9 20 teeth
Z 10 Z 9
N9
N 10
20
400
Z10 32 teeth
250
I stage, III pair
Since
Z5
Z6
N6
Z6 Z5
N5
N5
N6
Assume Z5 20 teeth
20
1000
400
Z6 50 teeth
I stage, II pair
Since
Z3
Z4
N4
N3
500
0.5
1000
Z3 0.5 Z 4
Also Z 3 Z 4 Z 5 Z6 70
0.5 Z 4 Z 4 70
Z4 47 teeth and Z3 23 teeth
Mark in 1st stage
Max speed as (G)
Min speed as (E)
Input at 1000 rpm as H
4.100
Design of Transmission Systems
Z 1 Z 2 70
Z1
Z2
N2
N1
630
0.63
1000
Z 1 0.63 Z2
0.63 Z 2 Z2 70
Z 2 43
Z 1 70.43 27
Z1 27 teeth
Z2 43 teeth
Problem 4.10: Design a 12 speed gear for a headstock of a
lathe. The maximum and minimum speeds are 600 rpm and
25 rpm respectively. The drive is from a electric motor giving
2.25 kW at 1440 rpm. Construct the speed diagram and sketch
the arrangement of the gear box.
(Nov/Dec 2009)
Solution
Z 12, N max 600 rpm, N min 25 rpm , P 2.25 kW ,
We know that
N max
N min
Z 1
600
12 1
25
1.334
First check for the step ratio whether it coincides with
series value.
Design of Speed Reducers (Gear Boxes) 4.101
Since the obtained step ratio does not coincide with
the standard step ratio and also the multiples of obtained
step ratio does not coincide with the standard step ratio,
therefore to obtain speeds, by Approximate method
N 1 25 rpm
N 2 N 1 25 1.334 33.35 rpm 34 rp m
N 3 N 2 34 1.334 45.356 rpm 46 rpm
N 4 N 3 46 1.334 61.364 rpm 62 rpm
N 5 N 4 62 1.334 82.7 rpm 83 rpm
N 6 N 5 83 1.334 110.72 rpm 111 rpm
N 7 N 6 111 1.334 148 rpm
N 8 N 7 148 1.334 197.432 rpm 198 rpm
N 9 N 8 198 1.334 264.132 265 rp m
N 10 N 9 265 1.334 353.5 354 rpm
N 11 N 10 354 1.334 472.23 473 rpm
N 12 N 11 473 1.334 630 rpm
Structural formula
Z322
12 P 1, P 2, P 3
P 1 X1, P 2 X 2, P 3 X 3
P 1 3; X 1 1
P 2 2; X 2 3 P 1
Design of Transmission Systems
4.102
P 3 2; X 3 P 1 P 2 6
12 3 1, 2 3, 2 6
Let u no. of stages 3
Draw u 1 4 vertical lines
Since, 12 speeds draw 12 horizontal lines
Procedure for construction of ray diagram:
3rd stage: 2 speed, 6 spaces
At 25 rpm (min), locate point “A ”
Leave six intervals at 148 rpm, mark point “B ”
Point “B ” represents N max 148 rpm
Point “A ” represents N min 25 rpm
Locate input speed, point “C ”
N max
N input
2 or
N min
N input
1
or 0.25
4
Select N input 83 rpm
25
148
1.78 2 and
0.30 0.25
83
83
Selection of N input 83 is satisfactory
2nd stage, 2 speeds, 3 space
Locate point “D ” above point “C ” after 3 spaces
N max 198, N min 83
Select N input 148
Design of Speed Reducers (Gear Boxes) 4.103
198
83
1.3 2 and
0.56 0.25
148
148
Selection of N input 148 is satisfactory
Locate point “E ” at 148 rpm
1st stage 3 speeds, 1 space
Mark “F ” and “G ”
Locate “H ” as input of motor
For first stage, it is not necessay to satisfy the
condition
N max
2
N input
Kinematic diagram
No. of gears required 2 3 2 2 2 7
14 gears
Calculation of Number of Teeth
III stage
1st pair (Reducing speed)
Speed of driver N 2 83 rpm
Speed of driven N 1 25 rpm
But
N1
N2
Let
Z2
Z1
Z 2 20 teeth
25 20
Z 1 66.4 67 teeth
83 Z 1
4.104
Design of Transmission Systems
K inem atic Layou t
Design of Speed Reducers (Gear Boxes) 4.105
4.106
Design of Transmission Systems
Z1 67 teeth; Z2 20 teeth
2nd pair, Increasing speed
N 4 driver speed 83 rpm
N 3 driven speed 148 rpm
But
N3
N4
Z4
Z3
and
Z1 Z2 Z3 Z4
Z 3 Z 4 67 20
Z 3 Z 4 87
and
Z4
148
Z3
83
Z 4 1.78 Z3
Z 3 1.78 Z 3 87
Z3 31.29 32 teeth
and Z4 55 teeth
II stage
1st pair: Reducing speed
N 8 Speed of driver 148 rpm
N 7 Speed of driven 83 rpm
But
Design of Speed Reducers (Gear Boxes) 4.107
N7
N8
Z7
Z8
Z7
Z 8 N8
N7
148
Z8
83
Z 7 1.783 Z 8
Assume
Z8 20 teeth
Z7 35.66 36 teeth
2nd pair: Increasing speed
N 6 Speed of driver 148 rpm
N 5 Speed of driven 198 rpm
But
N5
N6
Z6
Z5
and
Z7 Z8 Z5 Z6
36 20 Z 5 Z 6
Z 5 Z 6 56 teeth
and
Z6
198
Z5
148
Z 6 1.33 Z5
Z 5 1.33 Z 5 56
Z5 24 teeth
4.108
Design of Transmission Systems
Z6 31.92 32 teeth
I stage
In this stage, there are 3 speeds, and 3 pairs of gears
are required.
To avoid interference of gear of one shaft with the
gear of the other shaft while shifting:
Condition to avoid interference;
Z 12 Z 10 4 and Z 12 Z 14 4
1st pair: Reducing speed
Assume: Z10 20 teeth
N 10 Speed of driver 600 rpm
N 9 Speed of driven 148 rpm
But
N9
N 10
Z 10
Z9
148 20
600 Z 9
Z9 81.08 82 teeth
2nd pair: Intermediate speed
Let
N 14 Speed of driver 600 rpm
N 13 Speed of driven 198 rpm
But
Design of Speed Reducers (Gear Boxes) 4.109
N 13
N 14
Z 14
Z 13
198 Z 14
600 Z 13
Z 14 0.33 Z 13
and
Z 9 Z 10 Z13 Z 14
Z 13 Z 14 82 20
Z 13 Z 14 102
Z 13 0.33 Z 13 102
Z13 76.69 77 teeth
and
Z14 25 teeth
3rd pair: Increasing speed
N 11 speed of driven 265 rpm
N 12 speed of driver 600 rpm
But
N 11
N 12
Z 12
N 11
265 Z 12
600 Z 11
Z 12 0.44 Z 11
Design of Transmission Systems
4.110
But
Z 11 Z12 Z 13 Z14
Z 11 Z 12 77 25
Z 11 Z 12 102
Hence
Z 11 0.44 Z 11 102
Z11 71 teeth
and
Z12 31 teeth
Check for Interference
Z 12 Z 10 31 20 4
Z 12 Z 14 31 25 4
Hence, there is no interference and the design is safe.
Problem 4.11: The spindle of a pillar drill is to run at 12
different speeds in the range of 100 rpm to 355 rpm. Design
a three stage gear box with a standard step ratio. Sketch the
layout of the gear box, indicating the number of teeth on each
gear. The gear box receives 5 kW from an electric motor
running at 360 rpm. Sketch also the speed diagram.
(April/May 2008)
Solution
Given
P 5 kW, N max 355 rpm, Nmin 100 rpm
Z 12
Design of Speed Reducers (Gear Boxes) 4.111
N max
N m in
Z 1
355
12 1
100
1.122
The progression ratio 1.122 , coincides with R20
series standard progression ratio.
Therefore select R20 series speeds. (From P.S.G. Data book,
Pg.No. 7.20)
N 1 100 rpm , N2 112 rpm, N 3 125 rpm, N 4 140 rpm
N 5 160 rpm, N 6 180 rpm, N 7 200 rpm, N 8 224 rpm
N 9 250 rpm, N 10 280 rpm, N 11 315 rpm, N 12 355 rpm
Structural formula
Z322
12 P 1, P 2, P 3
P 1 X1, P2 X2, P 3 X 3
3 1, 2 3, 2 6
1st stage 2nd stage 3rd stage
P 1 3;
P 2 2;
P3 2
X1 1 1
X 2 P1 3
X 3 P1 P2
326
4.112
Design of Transmission Systems
360
H
335
315
280
250
G
D
224
F
200
E
B
180
160
C
140
125
112
100
I Stage
3(1)
II Stage
2(3)
Ray D iag ram
III Stage
2(6)
A
11
14 12 10
9
To a void interfere nce, a ll ge ars in this stage
are m o dife d to: Z 9 = 14 4; Z 1 0 = 80 ; Z 11 = 1 32 ;
Z 1 2 = 92; Z 1 3 =1 36 ; Z 1 4 = 88
D riven
13
6
5
Kinematic D iagram
Driven
Driver 200 rp m
8
7
Driven
4
3
2
1
10 0 rpm
Design of Speed Reducers (Gear Boxes) 4.113
4.114
Design of Transmission Systems
u No. of stages 3
Draw u 1 3 1 4 vertical lines
Since 12 speeds, draw 12 horizontal lines
Procedure for the construction of ray diagram
3rd stage : 2 speeds, 6 spaces
At 100 rpm (min) locate point A
Leave six intervals at 200 rpm mark point B
i.e., Point B represents N max 200 rpm, Point A
represents
N min 100 rpm
Locate input speed, Point C
N max
N input
or
2 select N input 160
200
1.25 which is less than 2
160
N min
N input
1
or 0.25
4
Locate Point C at 160 rpm.
2nd stage: 2 speeds, 3 spaces.
Locate point D above point C after 3 spaces.
To find N input for 2nd stage
N max 224 rpm
N min 160 rpm
Design of Speed Reducers (Gear Boxes) 4.115
select N input 200 rpm
N max
N inp ut
2
224
1.12 w hich is less than 2
220
N min
N input
1/4;
160
0.8 Selection of N input 200 is satisfactory.
200
Locate point E at 200 rpm. (Note: selection of 180
rpm is also correct)
1st stage: There are 3 speeds with 1 space interval.
Mark F and G
Locate H as input of motor.
For first stage it is not necessary to satisfy the condition.
N max
2
N
input
Join H, F
From F draw (2) speeds
F C 1 and F D 1
180 rpm, 250 rpm (maintain again 3 space intervals)
From C 1, draw 2 speeds. (112 rpm and 224 rpm)
C 1 A 1 and C 1 B 1
112 rpm, 224 rpm
4.116
Design of Transmission Systems
Join H, G
From G draw 2 speeds (200 rpm and 280 rpm)
G C 2 and C D 2
200 rpm, 280 rpm
From C 2 draw 2 speeds (125 rpm and 250 rpm)
C 2 A 2 and C 2 B 2
140 rpm, 315 rpm
From D 2
draw (2) speeds (180 rpm and 355 rpm)
D 2 A 5 and
D 2B 5
180 rpm
355 rpm
Kinematic Diagram
No. of Gears required are 2 3 2 2 2 7
14 Gears
Calculation of Number of Teeth
III stage
1st pair (Reducing speed)
speed of driven N 1 Z2
spe ed of driver N 2 Z1
let
Z 2 20 teeth
100 20
160 21
Z1
20 160
32 teeth
100
Design of Speed Reducers (Gear Boxes) 4.117
speed of driver N 2 160 rpm
speed of driven N 1 100 rpm
Assume above 17 teeth
1st pair Z1 20 teeth
Z2 32 teeth
N 3 drive n s peed 200 rpm
N 4 driver speed 160 rpm
2nd pair: Increasing speed
speed of driven N 3 Z4
speed of driver N 4 Z3
... (1)
Z1 Z2 Z3 Z4
20 32 Z 3 Z 4
Z 3 Z 4 52
200 Z 4
160 Z 3
Z 4 1.25 Z3
Z 3 1.25 Z 3 52
Z3
52
23
2.25
Take Z3 23 teeth
Z4 52 23 29 teeth
2nd pair Z3 23 teeth
Z4 29 teeth
... (2)
4.118
Design of Transmission Systems
II stage
1st pair: Reducing speed
speed of driven N 7 Z8
speed of driver N 8 Z7
N 8 driver speed 200 rpm
N 7 driven speed 160 rpm
160 20
200 Z7
Z7
20 200
160
Z7 25 teeth
Assume Z8 20 teeth
1st pair: Z7 25 teeth
Z8 20 teeth
2nd pair: Increasing speed
speed of driven N 5 Z6
speed of driver N 6 Z5
N 6 driver speed 200 rpm
N 5 driven speed 224 rpm
Z7 Z8 Z5 Z6
25 20 Z 5 Z 6
Z 5 Z 6 45
... (1)
Design of Speed Reducers (Gear Boxes) 4.119
224 Z 6
200 Z 5
Z 6 Z 5 1.12
Z 5 1.127 5 45
Z5
45
21.22
2.12
Take Z 5 21 teeth
Z 6 45 21
24 teeth
2nd pair Z5 21 teeth
Z6 24 teeth
I stage
In this stage there are 3 speeds; and 3 pairs of gears
are required. To avoid interference of gear of one shaft
with the gear of the other shaft while shifting:
Condition to avoid interference
Z 12 Z 10 4
Z 12 Z 14 4
1st pair: Reducing speed
N 10 driver speed 335 rpm
N 9 driven speed 200 rpm
N9
N 10
Z 10
Z9
; Assume Z 10 20
4.120
Design of Transmission Systems
Z 9 35.5 36 teeth
N 13
N 14
Z14
Z 13
Z14 Z 13
224
0.63 Z13
355
But Z 9 Z 10 Z 13 Z 14
Z 13 Z 14 36 20 56 Z 13
56
34 teeth
1.63
Z13 34 teeth
Z14 22 teeth
N 11
N 12
Z 12
Z 11
250 Z 12
355 Z 11
Z 12 Z 11 0.704
Z 11 Z 12 Z 13 Z 14 56
Z 11 0.704 Z 11 56 Z11 33 teeth
Z12 23 teeth
Check the No. of teeth on Z 9, Z 10 , Z 11 , Z 12 , Z13 and
Z 14
Z 12 Z 10 23 20 3 which is less than 4
Z 12 Z 14 23 22 1 which is less than 4
Interference will occur between the gears. To avoid
Interference, proportionately increase the No. of teeth on
all the gears.
Multiply by 4
Z 12 4 23 92, Z10 80, Z 12 Z 10 92 80 12 4
Design of Speed Reducers (Gear Boxes) 4.121
Satisfactory
Similarly
Z 9 144 teeth, Z 10 80 teeth, Z 11 132 teeth,
Z 12 92 teeth, Z 13 136 teeth, Z 14 88 teeth,
Problem 4.12: Design a layout of a 12 speed gear box for a
milling machine having an output of speeds ranging from 180
to 2000 rpm. Power is applied to gear box from a 6 kW
induction motor at 1440 rpm. Choose standard step ratio and
construct the speed diagram. Decide upon the various reduction
ratios and number of teeth on each gear wheel. Sketch the
arrangement of the gear box.
(April/May 2008)
Solution
N max
Nmin
Z 1
N max 2000 rpm, N m in 180 rpm
2000
12 1
180
1.244
It is not a standard step ratio
Try second method
(i.e.) Try the multiples of standard ratio and try the
series
Take R20 series and try multiples
1.12 1.12 1.256 which is greater than required.
Not satisfactory
4.122
Design of Transmission Systems
To obtain speeds (Approximately) by Approximate
method
N 1 180 rpm
N 2 N 1 224 rpm
N 3 N 2 278.65 279 rpm
N 4 N 3 347 rpm
N 5 N 4 431.66 432 rpm
N 6 N 5 536 rpm
N 7 N 6 667 rpm
N 8 N 7 830 rpm
N 9 N 8 1033 rpm
N 10 N 9 1285 rpm
N 11 N 10 1599 rpm
N 12 N 11 1990 rpm is almost equal to N max
Z322
12 P 1, P 2, P 3
P 1 3; X 1 1
P 2 2; X 2 P 2 3
P 3 2; X 3 P 1 P 2 3 2 6
3rd stage
Locate N input
Design of Speed Reducers (Gear Boxes) 4.123
Mark
N min 180 rpm as (A)
N max 667 rpm as (B)
N max
Ninput
2
Let us select N input 432 rp m
667
2
432
N min
N input
1
4
180 1
432 4
Selection of Input is satisfactory and mark it as (C)
2nd stage
Mark N max 830 rpm as (B)
N max
N input
Let
836
1.25 2
667
N input 667
N min
N input
432
1
0.647
667
4
Selection of Input 667 is satisfactory and mark it as (E)
I stage
1st pair
Let
Z2 20 teeth
4.124
Design of Transmission Systems
N 12 = 1 9 9 0 rp m
N 11 = 1 5 9 9 rp m
H
1440
rp m
N 10 = 1 2 8 5 rp m
N 9 = 1 0 3 3 rp m
N 8 = 8 3 0 rp m
D
N 7 = 6 6 7 rp m
E
B
N 6 = 5 3 6 rp m
C
N 5 = 4 3 2 rp m
N 4 = 3 4 7 rp m
N 3 = 2 7 9 rp m
N 2 = 2 2 4 rp m
I S ta g e 3 (1 )
II S ta g e 2 (3 )
Fig. Ray Diag ram
N 1 = 1 8 0 rp m
III S ta g e 2 (6 ) A
Z 1 3 =40
(83 0 rpm )
Driven
Driver 1440 rp m
Z 1 4 =23
Z 11 = 36
(10 33
rpm )
Z 1 2 = 27
Z 9 =4 3
(66 7rp m )
Kinem atic D iagram
Z 7 =3 1
(432 rpm )
Z 8 = 20
Z 5 = 23
(830 rpm )
Driven
Driver 667 rpm
Z 6 = 28
Driven
Z 2 =2 0
Z 3 =27
(6 67rpm )
Driver 432 rp m
Z 4 =41
Z 1 =48
(18 0 rpm )
Design of Speed Reducers (Gear Boxes) 4.125
4.126
Design of Transmission Systems
N1
Since
N2
Z2
Z1
Z1 Z 2
N3
Similarly
N4
N2
N1
Z 1 20
432
48 teeth
180
Z4
Z3
and
Z 1 Z 2 Z 3 Z4
Z 3 Z 4 68 teeth
Z4 Z3
N3
N4
Z 4 1.54 Z3
Z 3 1.54 Z 3 68
Z 3 27 teeth
and
Z 4 68 27 41
Z 4 41 teeth
II stage
N7
N8
Take
Z8
Z7
Z8 20 teeth
Z7 Z8
N8
N7
Z7 31 teeth
Design of Speed Reducers (Gear Boxes) 4.127
and
Z6
Z5
N5
N6
Z7 Z8 Z5 Z6
Z 5 Z 6 51 teeth
and
Z6 Z5
N5
N6
Z 6 1.24 Z 5
1.24 Z 5 Z 5 51
Z 5 23 teeth
and
Z 6 28 teeth
I stage
N9
N 10
Z 10
Z9
Take Z10 20 teeth
Z 9 Z 10
N 13
N 14
N10
Z 9 43 teeth
Z 14
Z 13
Z 14 Z 13
But
N9
N13
N 14
Z 14 0.576 Z 13
4.128
Design of Transmission Systems
Z 9 Z 10 Z 13 Z14
Z 13 Z 14 63 teeth
Z 13 0.576 Z 13 63
Z13 40 teeth
and
Z14 23 teeth
Similarly
N 11
N 12
Z 12
Z 11
Z 12 Z 11 0.717
N 11 1033
0.717
N 12 1440
But
Z11 Z 12 Z 13 Z14 63 Z 11 Z 12 63
Z 11 0.717 Z 11 63 Z11 36 teeth
and
Z12 63 36 27
Z12 27 teeth
Check for Interference
Z 12 Z10 4; Z 12 Z 14 4
27 20 4; 27 23 4
satisfactory
Design of Speed Reducers (Gear Boxes) 4.129
Design of Gear Box
1. Selection of spindle speed
Progression ratio
n 1
N max
N min
2. Construct the Ray diagram.
3. Construct the kinematic arrangement.
4. Calculate the No. of teeth of all the gears.
5. Choose the suitable material
(i) C45 – 30
(ii) 15 Ni2 Crl M015 – 80
(iii) 40 Ni2 Crl M028 – 100
and for permissible shear stress N/mm 2
(i) C45 30
(ii) C14 25
(iii) 40 Ni2 Crl M0 28 – 55
(iv) Low carbon alloy steel – 40
6. Calculation of module:
(i) Find the torque for the gear
T
P 60
2 N
(ii) Calculate the tangential force,
Ft
T
2T
r Zm
Design of Transmission Systems
4.130
(iii) Find the value of module,
m
where, m
Ft
m
b
10
m
(M value take from point 4)
7. Find the value of centre distance by using formula,
Zx Zy
a
m
2
8. Calculate the face width: b 10 m
9. Calculate the distance between the bearing using
formula,
L 25 10 4b 20 7b 10 25
Assume, width of the bearing 25 mm
Clearance between gear and bearing 10 mm
Distance between the adjacent groups of gears
20 mm
4b is two pairs gear group and 7b is three pairs
gear group from the total length.
10. Design of shafts
(i) Maximum bending moment M
F n Normal load
Fn L
4
Design of Speed Reducers (Gear Boxes) 4.131
Fn
Ft
cos
(ii) Torque eq T eq
M 2 T2
T
P 60
2 N low
T Torque on the spindle in system.
(iii) Find the diameter of the spindle
16 Teq
ds
where,
1/3
16T eq
d3s
(From point 4)
11. Design the diameter of the input and intermediate
shaft.
T 0.2d3s []
Problem 4.13: Design a 12 speed gear box for an all geared
head stock of the lathe. Maximum and Minimum speeds are
600 rpm and 25 rpm respectively. The drive is from an electric
motor giving 3.25 kW at 1500 rpm. (Assume length of shaft
860 mm).
Given Data: n 12 ; N max 600 rpm, N min 25 rpm ;
P 3.25 kW ; N input 1500 rpm
Design of Transmission Systems
4.132
To Design a gear box.
Solution
1. Selection of spindle speeds.
n 1
N max
N min
600
25
1/11
1.338
From PSG data book Page No. 7.20
1.06 1.06 1.06 1.06 1.06 1.334
Since 1.334 is very close to 1.338, we can take R 40
series.
N 1 25, N 2 33.5 , N 3 45, N 4 60, N 5 80 ,
N 6 106, N 7 140, N 8 190, N 9 250, N 10 335
N 11 450, N 12 600
2. Draw the Ray diagram:
Formula: 3(1), 2(3) 2(6)
Stage 1
N max
Ninput
N min
Ninput
140
1.75 2
80
25
0.31 0.25
80
190
1.36 2
40
Stage 2
N max
Ninput
Design of Speed Reducers (Gear Boxes) 4.133
N min
Ninput
80
0.57 0.25
40
140
0.311 0.25
150
250
0.56 2
450
Stage 1
N min
Ninput
N max
Ninput
3. Kinematic Arrangement
4. Calculate the No. of teeth of all the gears
Stage 3
1st pair: Maximum reduction from 80 rpm
corresponding gears are 13 and 14 on shaft 25 rpm.
Assume Z13 20 (driver)
Z 13
Z 14
N14
N13
20
25
; Z14 64
Z 14 80
2nd pair: Speed Increases from 80 to 140 rpm.
(Corresponding gears are 11 and 12).
Z 11
12
N 12
N 11
140
80
Z 11 1.75 Z 12
where,
Z 11 Z 12 Z 13 Z14
1.75 Z 12 Z 12 20 64
Design of Transmission Systems
4.134
3 (1)
2 (3)
2 (6)
6 00
H
4 50
3 35
2 50
G
D
1 90
F
1 40
E
1 06
80
C
60
Stag e 1
Stag e 2
Sh aft-4
S haft-3
S haft-2
Sh a ft-1
45
3 3.5
Stag e 3
Fig. Ray Diagram for 12 Speed G ear B ox
25
A
I S tag e
Fig. Kinem atic Arrang em en t fo r 12 Speed G ear B ox.
II S tage
III Stag e
Design of Speed Reducers (Gear Boxes) 4.135
4.136
Design of Transmission Systems
Z12 31
Z11 1.75 31 54
Stage 2
1st pair: Maximum speed reduction from 140 to 80
rpm (corresponding gears are 9 and 10)
Assume Z9 20 (driver)
Z9
Z 10
N 10
N9
20
80
Z 10 140
Z10 35
2nd pair: Speed Increase from 140 to 190 rpm.
(Corresponding gears are 7 and 8).
Z7
Z8
N8
N7
190
140
Z 7 1.357 Z 8
where,
Z 7 Z 8 Z 9 Z10
1.357 Z8 Z 8 20 35
Z8 24
Z7 1.357 24 32
Stage 1
1st pair: Maximum reduction from 450 to 140 rpm
(corresponding gears are 5 and 10)
Design of Speed Reducers (Gear Boxes) 4.137
Assume Z5 20 (driver)
Z5
Z6
N6
N5
20 140
Z 6 450
Z 6 65
2nd pair: Speed Reduction from 450 to 190 rpm.
(Corresponding gears are 3 & 4).
Z3
Z4
N4
N5
190
450
Z 3 0.422 Z 4
where,
Z 3 Z 4 Z 5 Z6
0.422 Z4 Z 4 20 65
Z4 60
Z3 0.422 60 25
3rd pair: Speed Reduction from 450 to 250 rpm.
(Corresponding gears are 1 and 2).
Z1
Z2
N2
N1
250
450
Z 1 0.555 Z 2
where,
Z 1 Z 2 60 25 85
Z2 55
Z1 0.555 55 30
5. Material Selection: C 45
4.138
Design of Transmission Systems
6. Calculation of module:
Torque at lowest speed 25 rpm by meshing gears 13
and 14.
T 14
60 3.25 10 3
2 25
1241.40 N m
To Calculate tangential force on gear 14,
Ft
module
T 2 T 14
r Z 14 m
2 1241.40 10 3
64 m
38793.75
m
m
. .
Zm
. r 2
F t
m
m
b
10 , 30 [for C 45 ]
m
m
m
m
38793.75 /m
10 30
129.31
Design of Speed Reducers (Gear Boxes) 4.139
m2
129.31
m
m 3 129.31
m 5.056 mm
Nearest value is 5 mm
(From PSG Data book Pg No. 8.2)
7. Calculate the centre distance
(i) Centre distance for
Z1 Z2
Stage 1, a1
m
2
30 55
a1
5
2
a1 212.5 mm
(ii) Centre distance for stage 2,
Z7 Z8
a2
m
2
32 24
5
2
140 mm
(iii) Centre distance for stage 3,
Z11 Z 12
a3
m
2
54 31
5
2
4.140
Design of Transmission Systems
212.5 mm
8. Find the face width
bm
b 10 5 50 mm
9. Length of shaft
L 860 mm (given)
10. Design of shafts
(i) Maximum bending moment M
M
Fn
Fn L
4
Ft
cos
38793.75 /m
cos
Assume, 20
38793.75 /5
7758.75
0.939
cos 20
Fn 8256.6 N
Maximum Bending moment,
M
8256.6 860
1.77 10 6 N mm
4
(ii) EquivalentTo rqueTeq
1.77 10 62 1241.4 2
T eq
M 2 T214
1.77 10 6 N mm
(iii) Find the diameter of the spindle,
Design of Speed Reducers (Gear Boxes) 4.141
1/3
16 T eq
ds
where,
30 N/mm 2 from the part 4
16 1.7 10 6
30
1/3
66.08 mm
Using R 40 series, Rounded value of the diameter is
67 mm.
11. Design of the other shaft
(i) Diameter of shaft:
Input speed 450 rpm
Torque
P 60 3.25 10 3 60
2 450
2 N
T 69 N m
T 0.2 d 3s
1
69 10 3 0.2d3s 30
1
ds 22.57 mm or 23 mm
1
(ii) Diameter of shaft 2
Minimum speed 140 rpm
Torque
P 60 3.35 10 3 60
2 140
2N
T 228.5 N m
wkt,
T 0.2d3s
2
4.142
Design of Transmission Systems
22.5 10 3 0.2d3s 30
2
ds2 33.64 mm
(iii) Diameter of shaft 3:
Minimum speed 80 rpm
Torque
P 60 3.35 103 60
2 N
2 80
399.87 N m
399.87 10 3 0.2 d 3s 30
3
ds 40.5 mm
3
Problem 4.14: Design a gear drive, to give 18 speeds for a
spindle of a milling machine. The drive is from an electric
motor of 6.75 kW at 1500 rpm. Maximum and minimum
speeds of the spindle are to be around 35 and 650 rpm
respectively.
Given Data: Z 18 ; P 6.75 kW; N motor 150 rpm;
N max 650 rpm; N min 35 rpm.
To: Design a Gear box
Solution
1. Selection of spindle speed
n 1
17
N max
N min
650
650
35
35
1.1875
1/17
4.143
Design of Transmission Systems
The step ratio is not standard, so multiply the
standard ratio to the calculated step ratio.
where, 1.06 1.06 1.06 1.191
The value is very close to the calculated step ratio
1.18 of R40 series.
(skip 2 speeds from the R40 series)
It’s given by,
N 1 35.5, N 2 42.5 , N 3 50, N 4 60, N 5 71 ,
N 6 85, N 7 100, N 8 118, N 9 140, N 10 170 ,
N 11 200, N 12 236, N13 280, N14 335, N 15 400,
N 16 475, N 17 560, N18 670
N max is very close to the N 18 , therefore speed
selection is satisfactory.
2. Ray diagram
Formula: 2(1) 3(2) 3(6)
Stage 3
N max
Ninput
N min
Ninput
280
2
140
35.5
0.253 0.25
140
280
1.186 2
236
Stage 2
N max
Ninput
Design of Speed Reducers (Gear Boxes) 4.144
2(1)
3(6)
3(2)
670
560
475
,
400
335
H
C
280
F
236
G
200
E
170
140
D
118
B
100
85
71
60
50
42.5
Stage 1
Stage 2
Stage 3
RAY DIAG RAM for 18 Speed G ear Box
A
35.5
10 m m
4b
3
20 m m
236 rpm
Z 4 =4 0
4
200 rp m
Z 6 =29
6
7
8
9
140 rpm
Stage 2
7b
Driven
Z 1 0 =34
10
Driver 236 rp m
Z 7 = 30
Z 9 =20
Z 8 =25
280 rpm
5
Z 5 = 25
20 mm
Kinematic Arrangem ent for 18 Speed G ear B ox
Stage 1
Z 2 =38
280 rpm
Driven
2
1
Z 1 =2 3 Z = 20
3
Driver 475 rpm
Z 1 2 =5 8
100 rpm
12
14
13
15
D riven
10m m
35.5 rpm
Z 1 6 = 79
16
Driver 140 rpm
Z 1 5 =20
Z 1 4 = 33
280 rpm
11
Z 11 =4 1
Z 13 =6 6
7b
a 1=
91 .5m m
a 2=
8 1m m
Stage 3
a 3=
148.5m m
4.145
Design of Transmission Systems
Design of Speed Reducers (Gear Boxes) 4.146
N min
Ninput
140
0.59 0.25
236
280
0.59 2
475
236
0.49 0.25
475
Stage 1
N max
Ninput
N min
Ninput
All conditions are satisfied.
3. Kinematic Arragement
4. Calculate the No. of teeth of all the gears.
State 3
1st pair: Maximum reduction from 140 to 35.5 rpm
(Corresponding gears are 15 and 16)
Assume, Z15 20 driver
Z 15
Z 16
N 16
N 15
20
35.5
Z 16 140
Z16 79
2nd pair: Speed Reduction from 140 to 100 rpm.
(Corresponding gears are 11 and 12)
Z 11
Z12
N 12
N11
Design of Transmission Systems
4.147
Z 11
Z12
100
140
Z 11 0.714 Z 12
Z 11 Z 12 Z 15 Z 16
0.714 Z 12 Z 12 20 79
Z12 58
Z11 0.714 58 41
rd
3
pair: Speed Increases from 140 to 280 rpm.
(Corresponding gears are 13 and 14).
Z 13
Z 14
Z 13
Z 14
N 14
N 13
280
140
280
Z 13
Z14 Z 13 2Z 14
140
where,
Z 13 Z14 Z 15 Z 16
2Z 14 Z 14 20 79
Z14 33
Z 13 2 33
Z13 66
Stage 2
I pair: Maximum reduction from 236 to 140 rpm
(Corresponding gears are 9 and 10)
Assume, Z9 20 (driver)
Design of Speed Reducers (Gear Boxes) 4.148
Z9
Z 10
N 10
N9
140
20
Z 10 236
Z10 34
2nd pair: Speed Reduction from 236 to 200 rpm.
(Corresponding gears are 7 and 8).
Z5
Z6
N6
N5
200
Z5
Z6
236
Z 5 0.847 Z 6
where,
Z 5 Z 6 Z 9 Z 10
0.847 Z 6 Z 6 20 34
Z6 29
Z5 0.847 29 25
3rd pair: Speed Increases from 236 to 280 rpm.
(Corresponding gears are 7 and 8).
Z7
Z8
N8
N7
280
Z7
Z 8 Z 7 1.186 Z 8
236
Z 7 Z 8 Z 9 Z10
4.149
Design of Transmission Systems
1.186 Z 8 Z 8 20 34
Z8 25
Z7 1.186 25 30
Stage 1
1st pair: Maximum Speed Reduction from 475 to 236
rpm (Corresponding gears are 3 and 4)
Assume, Z3 20 (driver)
Z3
Z4
N4
N3
20 236
Z 4 475
Z4 40
2nd pair: Speed Reduction from 475 to 280 rpm.
(Corresponding gears are 1 and 2).
Z1
Z2
N2
N1
280
Z1
Z 2 Z1 0.59 Z2
475
where,
Z 1 Z2 Z 2 Z4
0.59Z 2 Z 2 20 41
Z2 38
Z 1 0.59 38
Z1 23
Design of Speed Reducers (Gear Boxes) 4.150
5. Material Selection
Select 40 Ni2 Cr1 M0 28
6. Find the value of module:
Torque: gear 16 has the lowest speed of 35.5 rpm.
(i) T 16
P 60 6.75 10 3 60
2 N
2 35.5
T 16 1815.71 N m
(ii) Tangential Force,
Ft
wkt,
16
T 2 T16
r Z 16 m
2 1815.71 10 3 45967.34
m
79 m
m
m
b
10 ; 100
m
Ft
m
Material constant 100
m
45967.34 /m
10 100
m2
45.96
m
m 3 45.96
m 3.58 mm
45.96
m
Design of Transmission Systems
4.151
(or) m 4 mm (Standard module)
From PSG Data book Pg No 8.2
Centre distance for Stage 1,
Z1 Z2
a1
m
2
23 38
4 122 mm
2
For stage 2
Z5 Z 6
a2
2
25 29
4 108 mm
2
For stage 3
Z11 Z 12
a3
m
2
42 58
4 200 mm
2
8. Calculation of face width
b m 10 4 40 mm
9. Calculation of length of shaft
L 25 10 46 20 7b 20 7b 10 25
110 18b
110 18 40 830 mm
Design of Speed Reducers (Gear Boxes) 4.152
10. Design of shafts
(i) Maximum bending moment,
M
Fn
Ft
cos
Fn L
4
45967.34 /m
cos 20
Assume 20
45967.34 /4
12.22 10 3 N
cos 20
M
12.22 10 3 830
4
M 2.53 10 6 N mm
(ii) To find the equivalent Torque,
Teq
M 2 T216
2.53 10 62 1815.71 10 32
6.40 10 12 3.29 10 12
Teq 3.11 10 6 N mm
(iii) Find the diameter of spindle
16 T eq
ds
1/ 3
where, 55 N/mm 2 from point 4
4.153
Design of Transmission Systems
16 3.11 10 6
55
1/3
66.03 66 mm R 40 series
11. (i) Diameter of shaft 1
Input speed 475 rpm
Torque
P 60 6.75 10 3 60
2 N
2 475
T 135.70 N m
T 0.2 d 3s
1
135.70 10 3
ds
1
0.2 55
1/3
ds 23.10 mm
1
25 mm R 40 series
(ii) Diameter of shaft 2
Minimum speed 236 rpm
Torque
P 60 6.75 10 3 60
2 236
2 N
273.12 N m
273.12 10 3 0.2 d3s 55
2
d s 29.17 30 mm R 40 series
2
Design of Speed Reducers (Gear Boxes) 4.154
(iii) Diameter of shaft 3
Minimum speed 140 rpm
Torque
P 60 6.75 10 3 60
2 140
2 N
460.41 N m
460.41 10 3 0.2 d3s 55
3
ds 34.72 mm 35 mm R40 series
3
Problem 4.15: A six speed gear box is required to provide
output speeds in the range of 125 to 400 rpm, with a step ratio
of 1.25 and transmit a power of 5 kW at 710 rpm. Draw the
speed diagram and kinematic diagram. Determine the number
of teeth module and face width of all gears, assuming suitable
materials for gears. Determine the length of the gear box along
the axis of the gear shaft.
(Nov/Dec 2007)
Solution
No. of speeds Z 6
Max. speed
N max 400 rpm
Minimum speed N min 125 rpm
N max
N min
Z 1
400
6 1
125
1.262
The is not an standard progression ratio. Therefore,
for R40 series from P.S.G. Data book, Pg.No. 7.20
4.155
Design of Transmission Systems
1.06
skip 3 speeds
1.06 1.06 1.06 1.06 1.262
Skip (3) speeds and try R40 series
N 1 125 rpm
N 2 160 rpm
N 3 200 rpm
N 4 250 rpm
N 5 315 rpm
N 6 400 rpm
Since N 6 400 rpm is the maximum required speed
Select the above speeds
Structural formula
Z32
P1 3
X1 1
P1 P2
P2 2
X2 P2 3
Z P 1 X 1, P 2 X 2
3 1, 2 3
Check Either
N max
N input
2 or
N min
N input
1
4
Fo r 1st stage, the abo ve c o nditio n need no t be
c hec ked.Selec t N input as 710 rpm. Mark
N max 250 a s B
N min 125 as A
Design of Speed Reducers (Gear Boxes) 4.156
D =710 rpm
3 (1)
2 (3 )
710 rpm
400 rpm
315 rpm
B
250 rpm
200 rpm
C
160 rpm
125 rpm
3(1)
Ray D iag ram
2(3)
A
Driven
5
8
7
Z 7 = 28
Z 5 =20
9
10
Z 9 = 24
Z 8 = 63
Z 1 0 =6 7
Z 6 = 71 (3 15 rpm )
(2 50 rp m )
(200 rp m )
6
Driver 710 rpm
STAG E I
3
4
Z 3 =29
Z 4 =23
(250 rpm )
Driven
Driver 200 rp m
S TAG E II
1
Z 1 =2 0
2
Z 2 = 32
(125 rpm )
4.157
Design of Transmission Systems
Design of Speed Reducers (Gear Boxes) 4.158
For 2nd stage
Check
N max
N input
2 and
N min
N input
1
4
Select N input 200 rp m
Max. speed N max 250 rpm
Min. speed N min 125 rpm
125 1
250
2 and
200 4
200
Selection of N input 200 rpm is satisfactory and
mark it as (C)
Approximate No. of gears required
6 speeds 3 2 2 3 2 10 gears
Calculation of No. of teeth on gear
Assume Z 1 20 teeth driver
N 1 200 rpm Speed of driver
N 2 125 rpm Speed of driven
Z 2 N o . of teeth on driven
Z2
Z1
N1
N2
Z2 Z1
20
N1
N2
200
32 teeth
125
4.159
Design of Transmission Systems
Z1 20 teeth, Z2 32 teeth
Since centre distance is same
Z 1 Z 2 Z3 Z 4 20 32 52
Z4
and
Z3
Z4
Z3
N3
N4
200
0.8
250
Z 4 0.8 Z3
Z 3 0.8 Z3 52
Z3 29 teeth
But
Z 3 Z 4 52
Z4 23 teeth
Similarly,
Assume
Z6
Z5
N5
N6
Z5 20 teeth
Z6 Z5
20
N5
N6
710
200
71 teeth
Z5 20 teeth, Z6 71 teeth
Since centre distance is same
Z 5 Z 6 Z7 Z 8 91
Design of Speed Reducers (Gear Boxes) 4.160
Z 7 Z 8 91
Z8
and
Z7
Z8
Z7
N7
N8
710
315
Z8 2.253 Z 7
Z7 2.253 Z 7 91
Z7 28 teeth
and
Z8 63 teeth
Since centre distance is same
Z 5 Z 6 Z 7 Z 8 Z 9 Z10 91
Z 9 Z 10 91
But
Z 10
Z9
N9
N 10
Z 10
710
Z
250 9
Z 10 2.84 Z9
Z 9 2.84 Z 9 91
Z9 24 teeth
and
Z 10 91 24 67
Z10 67 teeth
4.161
Design of Transmission Systems
To avoid interference
Z 7 Z 5 and Z 7 Z 9 4
28 20 and 28 24 4
The condition satisfies, therefore the calculation of
number of teeth on each gear is satisfactory.
Module calculation
The lowest speed is 125 rpm
Calculate the torque at 125 rpm
T125 rpm
5 10 3 60 P 60
2 125
2 N
381.97 Nm
But
Torque F t r2
2
where r2 is the pitch circle radius of gear 2
But r2
Z2 m
2
32 m
16 m
2
where m refers to module
F t tangential force on gear 2
2
381.97 10 3 F t 16 m
2
Ft
2
But
m
381.97 10 3 23,873.12
N
m
16 m
M
Ft
m
Design of Speed Reducers (Gear Boxes) 4.162
where m
b
10 (assume) from P.S.G. Data book, Pg.No.
m
8.14
a1 Material constant
100, for 40 Ni2 Cr1 Mo 28
80, for 15 Ni2 Cr2 Mo15
30, for C 45
m
23873 12
/10 100
m
m2
23873.12
m 1000
m 3 23.873
m 2.9 mm
~
3 mm (standard) from P.S.G. Data book, Pg.No. 8.2
we know b 10 3 m
b 10 3 30 mm
From P.S.G. Data book, Pg.No. 8.22
a1 centre distance in stage 1
Z 1 Z2 m
2
20 32 3
2
20 71 3
136.5 mm
2
78 mm
a2
Z 5 Z 6 m
2
4.163
Design of Transmission Systems
Length of shafts
Assume Distance between the gear and gear box wall
is to be about 10 mm. Distance between the adjacent
groups of gears is to be about 20 mm. Total length
requirement for 2 pairs group and 3 pairs group are to be
4b and 7b respectively.
Thus the length of the shaft is obtained as
L 30 10 4b 20 7b 10 30
(First 30 and last 30 mm are for bearings)
Put b 30 mm
we get L 430 mm
Length of shafts is L 430 mm
Problem 4.16: Sketch the arrangement of a six speed gear
box. The minimum and maximum speeds required are around
450 and 1400 rpm. Drive speed is 1440 rpm. Construct speed
diagram of the gear box and obtain various reduction ratios.
Use standard output speeds and standard step ratio. Calculate
number of teeth in each gear.
Solution
No. of speeds Z 6
Maximum speed N max 1400 rp m
Minimum speed N min 450 rpm
N max
N min
Z 1
1400
6 1 1.254
450
It is not a standard ratio
Design of Speed Reducers (Gear Boxes) 4.164
Therefore, Trail (1) for R20 series (from P.S.G Data
book, Pg.No. 7.20)
1.12
1.12 1.12 1.254
Skipping one speed, we get
N 1 450 rpm
N 2 560 rpm
N 3 710 rpm
N 4 900 rpm
N 5 1120 rpm
N 6 1400 rpm
Structural Formula
Z3
P1
P 1 3;
2
P2
X1 1
P 2 2;
X2 P1 3
Z P 1 X 1, P 2 X 2
3 1, 2 3
For second stage
Mark N min as A
N max as B
4.165
Design of Transmission Systems
N max
Check
N input
Let
2
N input 710 rpm
900
2
710
N min
N input
N input
1
4
450
0.25
710
selection is satisfactory, mark it as C
Approximate No. of gears required
6 speeds 3 2 2 3 2 10 gears
For 1st stage
No. of speeds required are 3
No of gears required are 6
For 2nd stage
No. of speeds required are 2
No. of gears required are 4
Kinematic diagram
Let Z1 No . of Teeth of Driver 20 teeth
N 1 710 rpm
N 2 540 rpm
But
Z2
Z1
N1
N2
Z2
N1
N2
Z1
710
20
450
Design of Speed Reducers (Gear Boxes) 4.166
Input
D
1440 rpm
,,
1400 rpm
B2
1120 rp m
B1
E
D
900 rpm
B
C
710 rpm
A2
560 rpm
A1
2 nd S tage 2(3 )
1 s t Stage 3(1)
Ray D iag ram
450 rpm
A
D riven
Z 6 = 40
7 10 rp m
6
Driver 1440 rpm
8
7
Z 7 =27
Z 8 = 33
1120 rpm
5
Z 5 = 20
9
Z 10 =37
900 rp m
10
Z 9 =2 3
4
3
1
900 rp m
Driven
Driver 710 rpm
Z 3 =2 9
Z 1 = 20
Z 2 = 32
(450 rp m )
2
4.167
Design of Transmission Systems
Design of Speed Reducers (Gear Boxes) 4.168
32 teeth
Z 1 20 tee th, Z2 32 teeth
N3 710 rpm
N4 900 rpm
Since centre distance is same
Z 1 Z 2 Z3 Z 4 20 32 52
Z 3 Z 4 52
But
Z4
Z3
N3
N4
Z 4
710
Z Z 4 0.788 Z 3
900 3
0.8 Z 3
Z 3 0.8 Z 3 52 1.8 Z3 52
Z3 29 teeth
But Z 3 Z 4 52
Z 4 52 29 23 teeth
Z3 29 teeth, Z4 23 teeth
Similarly,
Z6
Z5
Z6
N5
N6
N5
N6
Z5
4.169
Design of Transmission Systems
Assume Z5 20 teeth
Z6
1440
20 40 teeth
710
and hence
Z5 20 teeth, Z6 40 teeth
Similarly
Z 5 Z 6 Z 7 Z 8 60
Z 7 Z 8 60
Z8
Z7
Z8
N7
N8
1440
Z7
1120
Z8 1.28 Z7
Z7 1.28 Z7 60
Z7 27 teeth
But Z 7 Z 8 60 Z 8 33 teeth
Z7 27 teeth, Z8 33 teeth
Since centre distance is same
Z 5 Z 6 Z7 Z8 Z9 Z10 60
Z 9 Z 10 60
But
Z 10
Z9
Z 10
N9
N 10
1440
Z Z 10 1.6 Z9
900 9
Design of Speed Reducers (Gear Boxes) 4.170
Z 9 1.6 Z9 60
Z9 23 teeth
and
Z10 37 teeth
Check to avoid interference
Z 7 Z 5 and Z 7 Z 9 4
27 20 7 and 27 23 4
The condition is satisfied. Therefore, the calculation
of No. of teeth on each gear is satisfactory.
Problem 4.17: The following data refers to an overlapping
Speed Gear Box:
No. of speeds required 14
Minimum speed
20 rpm
Maximum speed
400 rpm
Motor power
11 kW at 970 rpm
Draw speed diagram, and kinematic arrangement. Find the
actual output speeds.
Solution
N max 400 rpm
N min 20 rpm
Z No . o f speeds 14
N max
N min
Z 1
400
20
1
14 1
1.259
Motor speed I 970 rpm.
4.171
Design of Transmission Systems
Trail 1
The above step ratio is nearly equal to R10 series.
Therefore, Try R10 series;
N 1 20 rp m
N 8 100 rpm
N 2 25 rpm
N 9 125 rpm
N 3 31.5 rpm
N 10 160 rpm
N 4 40 rpm
N 11 200 rpm
N 5 50 rpm
N 12 250 rpm
N 6 63 rpm
N 13 315 rpm
N 7 80 rpm
N 14 400 rpm
The last speed is coinciding with the N max .
Selection of speeds is satisfactory.
The kinematic arrangement will be similar to that of
18 speed gear box with 4 overlapping speeds.
For 18 speeds structural formula,
18 3 3 2
P1 3
X1 1
Z P 1X 1, P 2X 2, P 3X 3
P2 3
X 2 P1 3
P3 2
X 3 P 1P 2 9
P1
P2 P 3
31, 33, 29
For 14 speed gear box, subtract 4 from the last stage
character.
Now the structural formula is modified as,
Design of Speed Reducers (Gear Boxes) 4.172
Z 3 1, 3 3, 2 9 4
3 1, 3 3, 2 5
I Stage - 3 speeds with one space interval.
II Stage - 3 speeds with three space intervals.
III Stage - 2 speeds with 5 space intervals.
Draw the speed diagram similar to previous method
in which four speeds are overlapping i.e., repeating
Selection of Ninput in each stage
3rd Stage
N max 63 rpm
N min 20 rpm
Let N input 40 rpm
N max
N input
Check
2
N max
N input
63
1.575
40
Take N input 40 rpm
2nd Stage
N max 160 rp m
N min 40 rpm
Try, N input 100 rpm
which is less than 2
satisfactory,
4.173
Design of Transmission Systems
N max
N input
160
1.6
100
which is less than two
Take Ninput 100 rpm
Ist Stage
For 1st stage, there is no need to check the condition
N max
2 . Therefore select Ninput as 400 rpm.
N input
Kinematic Arrangement
Draw the Kinematic arrangement for 18 speed gear
box.
In 3rd stage, 2 speeds are required – Two pairs of
gears required.
In 2nd stage, 3 speeds are required – Three pairs of
gears are required.
In 1st stage, 3 speeds are required – Three pairs of
gears are required.
To Find number of teeth on each gear.
III Stage
I Pair: Reducing speed
N2 speed of the driver 40 rpm ;
Z2 No. of teeth on driver;
N1 speed of the driven 20 rpm ;
Z1 No. of teeth on driven;
Design of Speed Reducers (Gear Boxes) 4.174
(O u tp ut)
15
13
11
7
9
* **
10
8
6
5
4
3
2
1
Design of Transmission Systems
*
16 14 12
4.175
Design of Speed Reducers (Gear Boxes) 4.176
V.R
Speed of the driven N 1 Z 2
Speed of the driver N2 Z 1
Take Z 2 20 teeth
20 20
40 Z 1
Z1
40 20
40
20
Z1 40 teeth
Z2 20 teeth
II Pair: Increasing speed
N 4 Speed of the driver 40 rpm ;
Z 4 driver teeth;
N 3 Speed of the driven 63 rpm ;
Z 3 driven teeth;
V.R
Speed of the driven N 3 Z 4
Speed of the driver N4 Z 3
Z 1 Z 2 40 20 60
63 Z 4
40 Z 3
Z 4 1.575 Z 3
Z 4 60 24 36
Z3 24 teeth
Z4 36 teeth
Z 3 Z4 60
Z 3 1.575 Z 3 60
60
23.30 teeth
2.575
take Z 3 24 teeth
Z3
4.177
Design of Transmission Systems
II Stage
1st Pair: Reducing speed.
N 5 speed of the driven 40 rpm ;
Z 5 No. of teeth on driven;
N 6 speed of the driver 100 rpm ;
Z 6 No. of teeth on driver;
V.R
Speed o f the d riven N 5 Z 6
Speed o f the driver N6 Z 5
Z6
40
100 Z5
Take Z 6 20 teeth
Z5
100 20
50 teeth
40
1st Pair Z5 50 teeth
Z6 20 teeth
II Pair: Increasing speed.
N 8 speed of the driver 100 rpm ;
Z 8 No. of teeth on driver;
N 7 speed of the driven 100 rpm ;
Z 7 No. of teeth on driven;
V.R
Speed of the driven N 7 Z 8
Speed of the driver N 8 Z 7
Z 5 Z 6 Z 7 Z 8 50 20 70
Z7 Z8 70
... (1)
Design of Speed Reducers (Gear Boxes) 4.178
160 Z 8
100 Z 7
Z 8 1.6 Z 7
... (2)
Z 7 1.6 Z 7 70
Z7
70
26.92
2.6
Take Z 7 27 teeth
Z 8 70 27 43
Z7 27 teeth
Z8 43 teeth
III Pair: Intermediate speed
N 9 Speed of the driven 80 rpm ;
Z 9 No. of teeth on driven;
N 10 Speed of the driver 100 rpm ;
Z 10 No. of teeth on driver;
Velocity ratio
N9
N 10
Z 10
Z9
Z 10
80
100 Z9
Z 9 Z 10 Z 5 Z 6 50 20
Z 9 Z 10 70
1
Z 10 0.8 Z 9
From equation (1) and (2)
Z 9 0.8 Z 9 70
Z9
70
1.8
2
4.179
Design of Transmission Systems
Z 9 38.88 ;
Z 10 70 39 31
Z9 39 teeth
Z10 31 teeth
To avoid interference, check
Z 8 Z 6 43 20 23
Z 8 Z 10 43 31 12
Since (1) Z 8 Z 6 4
and (2) Z 8 Z 10 4
Calculation of number of teeth on each gear is
satisfactory.
Z5 50 teeth
Z8 43 teeth
Z6 20 teeth
Z9 39 teeth
Z7 27 teeth
Z10 31 teeth
I Stage
I Pair: Reducing speed.
N 11 Speed of the driven 100 rpm ;
Z 11 No. of teeth on driven;
N 12 Speed of the driver 400 rpm ;
Z 12 No. of teeth on driver;
V.R
Speed of the d river N 11 Z12
Speed of the driver N 12 Z11
Design of Speed Reducers (Gear Boxes) 4.180
Assume
Z 12 20 teeth ;
Z 11
100 Z 12
400 Z 11
20 400
80 Teeth
100
Z11 80 Teeth
Z12 20 Teeth
II Pair: Increasing Speed
N 13 Speed of the driven 160 rpm ;
Z 13 No. of teeth on driven;
N 14 Speed of the driver 400 rpm ;
Z 14 No. of teeth on driver;
V.R
N 13
N 14
Z 14
Z 11 Z 12 80 20 100
Z 13
Z 13 Z 14 100
160 Z 14
400 Z 13
Z 14 0.4 Z 13
2
Z 13 0.4Z 13 100
Z 13 Z 14 100
Z 13
100
71.42 72
1.4
Z 13 72 teeth
Z 14 100 72 28 teeth
4.181
Design of Transmission Systems
II Pair
Z13 72 teeth
Z14 28 teeth
III Pair: Intermediate speed
N 15 speed of the driven 125 rpm
Z 15 driven teeth;
N 16 speed of the driver 400 rpm
Z 16 driver teeth;
V.R
driven speed N15 Z 16
driver speed N 16 Z15
125 Z16
400 Z 15
Z 15 Z 16 Z 13 Z 14 Z 11 Z 12
77 23 100
Z 16 0.3125 Z 15,
Z 15 0.3125 Z 15 100
Z 15 76.19 77
Z15 77 teeth
Z16 23 teeth
To avoid interference,
Check 1
Z 14 Z12 4
2
Z 14 Z16 4
1. 28 20 8 which is greater than (4)
2. 28 23 5 which is greater than (4)
Selection of Gears is satisfactory. Therefore,
calculation of No. of teeth on each gear is satisfactory.
Design of Speed Reducers (Gear Boxes) 4.182
To find actual output speeds
Output speed (1) input speed
Output speed (1) 400
400
Z 14
Z 13
No. of teeth on driver
No. of teeth on driven
Z8
Z7
Z4
Z3
28 43 36
72 27 24
371.60 rpm
Output speed (2) 400
400
Z 14
Z 13
... (1)
Z8
Z7
Z2
Z1
28 43 20
72 27 40
123.86 rpm
Output speed (3) 400
400
Z 14
Z 13
... (2)
Z6
Z5
Z4
Z3
28 20 36
72 50 24
93.33 rpm
Output speed (4) 400
400
Z 14
Z 13
... (3)
Z6
Z5
Z2
Z1
28 20 20
72 50 40
31.11 rpm
... (4)
4.183
Design of Transmission Systems
Output speed (5) 400
400
Z 14
Z 13
Z10
Z9
Z4
Z3
28 31 36
72 39 24
185.47 rpm
Output speed (6) 400
400
Z 14
Z 13
... (5)
Z10
Z9
Z2
Z1
28 31 20
72 39 40
61.82 rpm
Output speed (7) 400
400
Z 16
Z 15
... (6)
Z8
Z7
Z4
Z3
23 43 36
77 27 24
285.42 rpm
Output speed (8) 400
400
Z 16
Z 15
... (7)
Z8
Z7
Z2
Z1
23 43 20
77 27 40
95.14 rpm
Output speed (9) 400
400
Z 16
Z 15
... (8)
Z10
Z9
Z4
Z3
23 31 36
77 39 24
142.45 rpm
... (9)
Design of Speed Reducers (Gear Boxes) 4.184
Output speed (10) 400
400
Z 16
Z 15
Z10
Z9
Z2
Z1
23 31 20
77 39 40
47.48 rpm
Output speed (11) 400
400
Z 16
Z 15
... (10)
Z6
Z5
Z4
Z3
23 20 36
77 50 24
71.688 rpm
Output speed (12) 400
400
Z 16
Z 15
... (11)
Z6
Z5
Z2
Z1
23 20 20
23.89 rpm
77 50 40
... (12)
Output speed (13) 400
400
Z 12
Z 11
Z8
Z7
Z4
Z3
20 43 36
80 27 24
238.88 rpm
Output speed (14) 400
400
Z 12
Z 11
... (13)
Z8
Z7
Z2
Z1
20 43 20
80 27 40
79.62 rpm
... (14)
4.185
Design of Transmission Systems
Output speed (15) 400
400
Z 12
Z 11
Z10
Z9
Z4
Z3
20 31 36
80 39 24
119.23 rpm
Output speed (16) 400
400
Z 12
Z 11
... (15)
Z10
Z9
Z2
Z1
20 31 20
80 39 40
39.74 rpm
Output speed (17) 400
400
Z 12
Z 11
... (16)
Z6
Z5
Z4
Z3
20 20 36
80 50 24
60 rpm
Output speed (18) 400
400
Z 12
Z 11
... (17)
Z6
Z5
Z2
Z1
20 20 20
80 50 40
20 rpm
... (18)
Problem 4.18: Design a Gear box, for the following data:
No. of speeds required 16; Min. speed 100 rpm; Max. speed
560 rpm; Draw neat diagram and Kinematic arrangement.
(May/June 2013)
Design of Speed Reducers (Gear Boxes) 4.186
Given:
N max
N input
N max 560 rpm;
Z 1
560
16 1
100
N min 100 rpm;
No. of speeds Z 16
1.12
which is standard ratio for R20 series.
N 1 100 rpm;
N 9 250 rpm;
N 2 112 rpm;
N 10 280 rpm;
N 3 125 rpm;
N 11 315 rpm;
N 4 140 rpm;
N 12 355 rpm;
N 5 160 rpm;
N 13 400 rpm;
N 6 180 rpm;
N 14 450 rpm;
N 7 200 rpm;
N 15 500 rpm;
N 8 224 rpm;
N 16 560 rpm;
Structural formula
Z 16 4 2 2
P1 4
X1 1
3 stages required.
P2 4
X2 P1 4
P3 2
X3 P1 P2
P1
P2 P3
Z P 1X 1 , P 2X 2 , P 3X 3
st
1 Stage
16
41
st
1 Stage
2
nd
,
Stage
24
2
nd
3
rd
Stage
, 28
rd
Stage 3
Stage
428
4.187
Design of Transmission Systems
3rd Stage
To select N input,
Select N input 200 rpm
N max
N input
250
1.25
200
which is 2 Satisfactory.
N min
N input
100
0.5
200
which is 0.25 Satisfactory.
Select Ninput 200 rpm - 3rd Stage Locate (C)
2nd Stage
Select N input 280 rpm
N max
N input
315
1.125
280
which is less than (2) Satisfactory
N min
N input
200
0.7142
280
which is greater than (0.25) Satisfactory
Select Ninput 280 rpm - 2nd Stage. Locate (E)
1st Stage
In this stage, N input 560 rpm
(No need to check condition)
Design of Speed Reducers (Gear Boxes) 4.188
I
Input
D3
D2
H
D1
G
F
D
E
C3
C
B7
560
B6
500
B5
450
B4
400
B3
355
B2
315
B1
280
B 250
2
C1
C
A7
224
A6
200
A 5 180
st
1 Stage 4 (1)
nd
2 S tag e 2(4 )
rd
3 Stag e 2 (8 )
A4
160
A3
140
A2
125
A1
112
A
100
1
6
9
15
13
11
12 10
7
8
5
(1 00)
3
4
2
Design of Transmission Systems
16 1 4
4.189
Design of Speed Reducers (Gear Boxes) 4.190
Locate I:
In the 3rd stage, above point (C); mark (D) after
four space intervals. i.e. at 315 rpm.
In the 2nd stage, above point (E); mark (F), (G),
(H) with one space interval.
Join CA;
CB
100 rpm 250 rpm
From C 1
Join IF, FC 1
C 1A 1;
112 rpm
224
C 1B 1
280 rpm
Join IG
From G
GC 2 250
GD 2 400
From C 2
C 2A 2 125
C 2B 2 315
Join I H
From H
HC 3 280
From C 3
C 3A 3 140
C 3B 3 355
HD 3 450
Design of Transmission Systems
4.191
Repeat the same process; And complete the speed
diagram.
Kinematic Arrangement
No. of speeds required are 16
The no. of stages are (3): 4 2 2
The no. of gears required 24 2 2
28 16
Z P 1X 1, P 2X2, P 3X 3
16 41,
1
st
Stage
24,
2
nd
Stage
28
3
rd
Stage
Calculation of No. of Teeth on each gear
III Stage
I Pair: Increasing Speed
VR
N1
N2
Z2
Z1
Z2
250
; Z 2 31.25
200 25
Z 2 32 teeth
Z1 25 teeth
Z2 32 teeth
N1 Speed of driven 250 rpm
N2 Speed of driver 200 rpm
Z1 no. of teeth on driven 25 assume
Z2 No . of teeth on driver
Design of Speed Reducers (Gear Boxes) 4.192
II Pair : Decreasing Speed
VR
N3
N4
Z4
Z3
;
100 Z4
200 Z3
N3 Speed of driven 100 rpm
N4 Speed of driver 200 rpm
Z3 No . of teeth on driven
Z4 No . of teeth on driver
Since centre distance is constant,
Z 1 Z 2 Z 3 Z4 25 32 57
Z 3 Z 4 57; Z 3 0.5 Z 3 57; Z3
57
3.8 teeth
1.5
Z 4 19 teeth
Z3 38 teeth
and Z4 57 38 19 teeth
II Stage
I Pair : Increasing speed:
VR
N5
N4
Z6
Z5
315 Z 6
; Z 6 28.1 28 teeth
280 25
Z5 25 teeth
Z6 28 teeth
N7 Speed of driven 200 rpm
N8 Speed of driver 280 rpm
Z7 No . of teeth on driven
Z8 No . of teeth on driver
Design of Transmission Systems
4.193
II Pair: Decreasing Speed
VR
N7
N8
N5 Speed of driven 315 rpm
Z8
N6 Speed of driver 280 rpm
Z7
200 Z 8
; Z 8 0.714 Z7
280 Z 7
Z5 No . of teeth on driven 25 assume
Z6 No . of teeth on driver
But Z 7 Z 8 Z5 Z 6 25 28 53
Z 7 0.714 Z 7 53
Z 7 30.9 31 teeth and Z 8 53 31 22
Z7 31 teeth
Z8 22 teeth
N9 Speed of driven 315 rpm
I Stage
I Pair: Increasing Speed
VR
N9
N 10
Z 10
N10 Speed of driver 560 rpm
Z9 No. of teeth on driven 40 assume
Z10 No. of teeth on driver
Z9
315 Z 10
; Z 10 22.5
40
560
Z9 40 teeth and
Note: In any calculation of
number of teeth on the gear
wheel, the value must be
greater than 17; Because of
this reason, Z 9 is assumed
as 40 teeth.
Z10 23 teeth
II Pair : Decreasing Speed
VR
N 11
N 12
Z 12
Z 12
Z 11
N11 Speed of driven 280 rpm
;
N12 Speed of driver 560 rpm
Z11 No. of teeth on driven
280
Z12 No. of teeth on driver
; Z 12 0.5 Z 11
560 Z 11
Design of Speed Reducers (Gear Boxes) 4.194
Z 11 0.5 Z 11 63; Z 11
63
42 teeth
1.5
and Z 12 6 42 21 teeth
Z11 42 teeth
Z12 21 teeth
III Pair: Increasing speed:
VR
N 13
N 14
Z 14
Z 13
Z 14 Z 13 63
0.71428 Z 13 Z 13 63
Z 13
63
~ 37
1.71428
Z 14 63 37 26
Z13 37 teeth
Z14 26 teeth
N 13 S pe ed of driven 400 rpm
N 14 S pe ed of driver 560 rpm
Z 13 N o. of teeth on driven 37 teeth assume
Z 14 N o. of teeth on driver
IV Pair: Decreasing Speed
VR
N 15
N 16
N15 Speed of driven 355 rpm
Z 16
N16 Speed of driver 280 rpm
Z 15
Z15 No. of teeth on driven
Z16 No. of teeth on driver
355 Z 16
; Z 16 0.633 Z 15
560 Z 15
Design of Transmission Systems
4.195
But Z 15 Z16 Z13 Z 14 26 19 63
Z 15 0.633 Z 15 63 ;
Z 15 39
Z 15 39 teeth and Z 16 63 39 24
Z15 39 teeth
Z16 24 teeth
Problem 4.19: Design the layout of a gear box for a milling
machine having an output of speeds ranging from 180 to 2000
rpm. Power is supplied to the gear box from a 6 kW induction
motor at 1440 rpm. Choose standard step ratio and construct
the speed diagram. Decide upon the various reduction ratios
and the number of teeth at each gear wheel. Sketch the
arrangement of gear box.
(April/May 2008)
Solution
Given
N max 2000 rpm
N min 180 rpm
P 6 kW
Z 8 assum ed since not given
N max
N min
Z 1
2000
8 1
180
1.41
Design of Speed Reducers (Gear Boxes) 4.196
Consider R20 series, which is step ratio 1.12
1.12
1.12 1.12 1.40
skip 2 speeds
Try R20 series by skipping (2) speeds
(From P.S.G. Data book, Pg.No. 7.20)
N 1 180 rpm, N 2 250 , N 3 400, N 4 560
N 5 800 rpm, N 6 1000 , N 7 1400 , N 8 2000
Structural formula
Z222
8 P 1, P 2, P 3
P 1 X 1, P 2 X 2, P 3 X 3
2 1, 2 2, 2 4
P1 2 ; P2 2 ; P3 2
X1 1 1
X2 P1 2
X3 P1 P2 2 2 4
U N o. of stages 3
draw u 1 3 1 4 vertical lines
Since 8 speeds, draw 8 horizontal lines
Procedure for the construction of ray diagram
3rd stage: 2 speeds, 4 spaces
Locate input speed (i.e.) point C
Point A is minimum speed and B is the maximum
speed in stage 3
4.197
Design of Transmission Systems
N max
N input
Select
2
N input 560 rpm
800
2
560
N min
N input
1
0.25
4
180 1
0.25
560 4
Selection of N input 560 is satisfactory.
Locate point ‘C’.
Similarly mark all the points and complete the ray
diagram.
Kinematic diagram
No. of gears required are
2 2 2 2 2 6 12 Gears
Calculation of number of teeth
III stage
Speed of driven N 1 Z2
Speed of driver N 2 Z1
(i.e.) N 1 180, N 2 560
Assume above 17 teeth
Let Z2 20 teeth
Design of Speed Reducers (Gear Boxes) 4.198
H
2 00 0
1 40 0
1 00 0
D
F
8 00
B
E
5 60
C
4 00
2 50
I S tag e
2 (1)
II S tag e
2 (2)
R ay D iag ram
III S tag e
2 (4)
1 80
A
11
12
I STA G E
Z 11 = 29
10 00 rpm
Driven
D river 1440 rpm
Z 1 2 = 20
10
7
I I S TA G E
Z 7 =2 9
5 60 rpm
D riven
8
D river 800 rpm
Z 8 =2 0
Z 5 = 22
10 00 rpm
5
6
Z 6 =2 7
Kinem atic Diagram
Z 9 = 31
80 0 rpm
9
Z 1 0 =1 8
3
4
2
1 80 rpm
Z 1 = 62
Driven
Z 2 = 20
III STA G E
Z 3 = 34
800 rp m
D river 560 rp m
Z 4 = 48
1
4.199
Design of Transmission Systems
Design of Speed Reducers (Gear Boxes) 4.200
180 20
560 Z 1
Z1 62 teeth
Similarly
N3
N4
Z4
Z3
Z1 Z2 Z3 Z4
20 62 Z 3 Z 4 Z 3 Z 4 82
800 Z 4
Z 4 1.42 Z 3
560 Z 3
Z 3 1.42 Z 3 82
Z3 34 teeth
and
Z4 48 teeth
II stage
N7
N8
Z8
Z7
Assume Z8 20
560 20
800 Z 7
Z7 29 teeth
Similarly
N5
N6
Z6
Z5
Z 7 Z 8 Z5 Z6
29 20 Z 5 Z 6
4.201
Design of Transmission Systems
Z 5 Z 6 49
also
1000 Z 6
Z 6 1.25 Z 5
800
Z5
Hence
Z5 22 teeth
Z6 27 teeth
I stage
Z11
Z12
N 12
N 11
Assume Z12 20
1440 Z 11
1000 20
Z11 29 teeth
Similarly
Z 9 Z 10 Z11 Z 12
(i.e.)
Z 9 Z 10 49
and
Z9
Z 10
N 10
N9
Z9
Z 10
Z 9 1.8 Z 10
1.8Z 10 Z 10 49
Z10 18 teeth
Z 9 49 18
Z9 31 teeth
1440
800
Design of Speed Reducers (Gear Boxes) 4.202
Problem 4.20: A three speed reduction gear box is to have
the following speed ratios as nearly as possible. Bottom gear
5:1, second gear 3:1 and top gear 1.5:1. Output shaft and input
shafts are to be in line and the centre distance which is
horizontal between them and the lay shaft is 144 mm. All the
gears are to be 4 mm module and none should have less than
20 teeth of 20 pressure angle. Determine the suitable No. of
teeth and pitch circle diameter of all the gear wheels. Find the
actual speeds obtained.
(Oct. 2007)
Gears (1) and (2) Z 1 and Z 2 are the constant
mesh gears.
Gears (4), (6), (8) Z 4, Z 6 and Z 8 are sliding gears
on lay shaft.
Gears (3), (5), (7) Z 3, Z 5 and Z 7 are fixed gears
on output shaft.
Gears (3) and (4) Z 3 and Z 4 - Form Top gear
Gears (5) and (6) Z 5 and Z 6 - Form Second gear
Gears (7) and (8) Z 7 and Z 8 - Form Bottom gear
Given
I. Bottom Gear
Speed ratio
Speed of driver No. of teeth on driven
Spee d of driven No. of teeth on driver
N1
N2
N8
N7
Z2
Z1
Z2
Z1
Z7
Z8
Z7
Z8
5
5
... (1)
4.203
Design of Transmission Systems
*
*
*
*
*
II. Second Gear
Speed ratio
N1
N2
N6
N5
Z2
Z1
Z2
Z1
Z5
Z6
Z5
Z6
3
3
... (2)
III. Top Gear
Speed ratio
N1
N2
Z2
Z1
N4
N3
Z3
Z4
Z2
Z1
Z3
Z4
1.5
1.5
... (3)
Since the centre distance is same for all the gears,
Z 1 Z 2 Z 3 Z 4 Z5 Z6 Z7 Z 8
Design of Speed Reducers (Gear Boxes) 4.204
But, distance between output shaft and lay shaft
144 mm given
i.e., PCRGear 1 PCRGear 2 144
PC D
PCD
144
2
Gear 1 2 Gear 2
But, Module m
PCD
Z
D
Z
where Z No. of teeth.
D or PCD pitch circle diameter.
DmZ
module Z2
mo dule Z 1
144
2
2
Gear 1
Gear 2
module m 4 mm
4 Z1
2
4 Z2
2
given
144
Z 1 Z 2 72 teeth
Z3 Z4
Z5 Z6
Z7 Z8
Let Z 8 20 teeth
Z 7 Z 8 72
Z 7 72 20
52 teeth
4.205
Design of Transmission Systems
Z7 52 teeth
Z8 20 teeth
Bottom Gear
From eq. (1),
Z2
Z1
Z7
Z8
Z2
Z1
5
5
Z8
Z7
5
20
1.923
52
Z2 1.923 Z 1
... (4)
Z 1 Z 2 72
But
... (5)
From eq. (4) and (5)
Z 1 1.923 Z 1 72
Z1
Take
72
24.63
2.923
Z 1 25 teeth ;
Z 2 72 25
47 teeth
Z1 25 teeth
Z2 47 teeth
Second Gear
From eq. (2)
Z2
Z1
Z5
Z6
3
47 Z5
3
25 Z 6
Design of Speed Reducers (Gear Boxes) 4.206
Z 5 1.596 Z 6
... (6)
Z 5 Z 6 72
... (7)
From eq. (6) and (7)
1.596 Z 6 Z 6 72
Z6
72
27.73
2.596
Take Z 6 28 teeth
and Z5 72 28 44
Z5 44 teeth
Z6 28 teeth
Top Gear
From eq. (3)
Z2
Z1
Z3
Z4
1.5
47 Z3
1.5
25 Z 4
Z 3 0.7978 Z 4
Z 3 Z 4 72
From eq. (8) and (9)
0.7978 Z 4 Z 4 72
Z4
72
40.04
1.7978
Take
Z 4 40 teeth
... (8)
... (9)
4.207
Design of Transmission Systems
Z 3 72 40 32
Z3 32 teeth
Z4 40 teeth
Actual Speeds
Speed of driven N o. of teeth on driver
Spe ed of driver No. of teeth on driven
Top Gear
Speed of driven (output speed)
Speed of driver
Z1
Z2
Z4
Z3
(Assume speed of driver 2000 rpm )
Output speed for Top gear 2000
25 40
47 32
1329.78 rpm
Second Gear
Output speed for 2nd gear 2000
2000
Z1
Z2
Z6
Z5
25 28
47 44
676.98 rpm
Bottom Gear
Output speed for bottom gear
2000
2000
Z1
Z2
Z8
Z7
25 20
47 52
408.16 rpm
Design of Speed Reducers (Gear Boxes) 4.208
Pitch circle diameter of gears
D 1 mZ 1 4 25 100 mm
D 2 mZ 2 4 47 188 mm
D 3 mZ 3 4 32 128 mm
D 4 mZ 4 4 40 160 mm
D 5 mZ 5 4 44 176 mm
D 6 mZ 6 4 28 112 mm
driven N1 100 rpm
driver N2 160 rpm (input)
D 7 mZ 7 4 52 208 mm
D 8 mZ 8 4 20 80 mm
4.7 CONSTANT MESH GEAR BOX
It is a type of transmission used in motor vehicle
application and also known as manual gear box. It uses a
driver-operated clutch which is engaged and disengaged by
a foot pedal or hand lever for regulating torque transfer
from the engine to the transmission system.
All transmissions donot have 4 speeds forward and
all donot have the same gear reductions at the various
speeds. For example: Passenger cars usually have only
three forward speeds and one reverse speed. We must
remember that, the gear reduction in the transmission is
only between the engine and the propeller shaft. In this
type of transmission, certain countershaft gears are
constantly in mesh with the main shaft gears.
Constant mesh gear box is an example for the
application of ordinary gear train in automobiles. In this
type, the main shaft gear wheels and the lay shaft gear
wheels, giving different ratios on engaging with each other,
4.209
Design of Transmission Systems
Sh iftin g leve r
G ear
Se lector Fo rk
3
4
Fro m
En gine
5
R
D og D 3
2
Dog D1
1
Dog D2
En gagem en t
d og s
To
D iffere ntial
M ain shaft
A
Prim ary
sha ft
D
C
B
D1 F
E
H
D2 J
L D3
G
I
K
L aysh aft
Fig.4.3 Con stant Mesh Gear B ox
P
Idle r
N G ear
M
are always in mesh (i.e), all the gear wheels are always
being meshed with their pair.
The general layout of constant mesh type is similar
to that of the sliding mesh, however it differs in the terms
of gear wheel type and wheel teeth design.
Constant mesh gear box uses double helical gears for
its transmission, the main benefit of double helical (or)
stronger helical gear is that it helps in “quieter (less noisy)
operation”
The helix arrangement on the teeth (or) the gear
tooth is always in contact with its pair which reduces the
chattering effect which is quiet common in case of straight
cut teeth (or) spur gear type.
Design of Speed Reducers (Gear Boxes) 4.210
In constant mesh gear box set up, the main shaft
revolves at different speed and the connection between any
one of the wheel and main shaft is obtained by “Dog clutch
members”.
The forward speed of the gear box works on constant
mesh principle and reverse speed on sliding mesh principle.
4.7.1 Constant Mesh Gear Box Gear Shifting
1. First Gear: Drive is through ABCD gear pairs and D1
engages with D.
The engagement dog D 1 is shifted to the first pair
that is towards the primary shaft, the first gear gets locked
to the main shaft thus the main shaft starts rotating in
the first gear. (i.e. low speed but high torque).
2. Second Gear: Speed Gear Drive is through ABEF and
D1 engages with F.
The clutch pedal is pressed thus disconnecting the
transmission, now the dog D 1 is shifted from first pair to
the second pair that is away from the primary shaft. Now
the clutch is released and the main shaft is at gear 2.
3. Third Gear: Drive is through ABGH and D2 engages
with H
The transmission is disconnected by pressing the
clutch. The engagement dog D 2 is shifted towards the
primary shaft to the Gear pair (3), thus the main shaft is
locked to gear (3) and the clutch is brought to engaged
position.
Design of Transmission Systems
4.211
4. Fourth Gear: Drive is through ABIJ and D2 engages
with J
The engagement dog D2 is shifted away from the
primary shaft to gear pair (4).
5. Fifth Gear or Top Gear: Drive is through ABKL and
D3 engages with L
The engagement dog D 3 is brought towards the
primary shaft to the gear pair (5) with the highest gear
ratio.
6. Reverse Gear: Drive is through ABMNP and D3 engages
with P
The dog D3 is shifted to the idler gear which is in
constant mesh. This changes the direction of drive and the
reverse gear is obtained.
4.8 SPEED REDUCER UNIT
Worm Reducer
Helical Reducer
Miler Bevel gear reducer
4.8.1 Worm Reducer
There are two types of worm gear reducers.
Cylindrical type (worm power drive) and drum shaped type
(Troi drive). A worm gear reducer is a reduction gear box
which consists of a helical output gear and a worm input
gear where a worm (which is a gear in the form of a screw)
meshed with a worm gear (which is similar in appearance
to a spur gear).
Design of Speed Reducers (Gear Boxes) 4.212
4.8.2 Helical Reducer
It has high power and is a compact with standard
right angle and parallel shaft types, including motor types.
The helical power drive uses a modular housing to
accomodate any mounting position.
4.8.3 Bevel Reducer
Bevel gears are gears where the axis of the two shafts
intersect and the tooth bearing faces of the gears
themselves are conically shaped. There are four types of
bevel gears.
Straight bevel gears
Spiral bevel gears
Zerol bevel gears
Hypoid bevel gears
4.9 VARIABLE SPEED GEAR BOX
Fluid couplings and torque convertes are used as
variable speed gear box to suit the varying engine speed.
4.9.1 Fluid coupling (or) Fluid fly wheel
It is a hydro dynamic device which is used to
transmit rotating mechanical power. It has been used in
automobile transmission system as an alternative to a
mechanical cluth. It also has widespread applications in
marine and industrial machine drives, where variable speed
operations and controlled start-up without shock loading of
the power transmission system are essential. It is also
called as fluid flywheel.
A fluid flywheel is a hydraulic device. In 1905 Dr.
Hermann Fottinger, a chief engineer of the Vulcan Werke
4.213
Design of Transmission Systems
Sh ell
Vanes
C o re
C o re
R u nn er
H o using
,nput Sh aft
O utput S haft
,m peller
or R u nn er
O il C ircula tio n
,m peller
Fig.4.4 Fluid Flywheel.
AG in Germany invented the fluid flywheel. The fluid
flywheel is now a fundamental part of modern car design
and is used in other applications including diesel
locomotives.
Fluid flywheel is a kind of fluid coupling in which
the flywheel is the driving rotor. Fluid flywheel is a fluid
device utilizing recirculated fluid within a sealed housing
to maintain speed or torque applied to a mechanical
apparatus without relying on inertia of weight.
A fluid-flywheel consists of two concentric housings a main circulation chamber and an angular recirculation
chamber surrounding the main circulation chamber. A shaft
is mounted on the bearing of the outer housing and the
extension of the shaft has a series of blades mounted
thereon.
Upon rotation of the shaft, fluid is drawn by the
blades into the inlet end of the main circulation chamber.
Design of Speed Reducers (Gear Boxes) 4.214
The fluid is propelled from one series of blades to the next
until it is discharged from the outlet end. The fluid is then
redirected around the inner housing and re-circulated
through the recirculation chamber. The fluid, being
constantly re-circulated within the device will increase in
speed or maintain the existing speed with relatively
minimum force being applied to rotate the extending shaft.
Toroidal shaped flow deflectors at opposing ends are useful
for smooth transition of fluid from the main circulation
chamber to the recirculation chamber and vice versa.
Van es
E n gine
C ra nk
S h aft
H u bs
,m pe ller
S h ell
C lutch
S ha ft
R o tor
Fig.4.5. Tw o H alve s of F luid F lywh eel.
The driving unit is called impeller and the driven
limit is called as runner. When the efficiency of the liquid
coupling is highest, the impeller and the runner almost
runs at same speed. But usually the runner speed is less
than the impeller. This speed lag of runner is called slip.
The slip is greatest when the vehicle is at rest that is when
the runner is stationary.
Fluid coupling is used with conventional clutch and
transmission to enable the driver to use clutch and gear
Design of Transmission Systems
4.215
with less skill and fatigue as compared to the mechanical
linkage.
Applications
Fluid couplings are used in many industrial
applications involving rotational power in machine
drives.
Rail transportation and Hydraulic braking systems.
Automobile and Aviation systems.
4.9.2 Torque Convertor
A torque converter is a hydraulic fluid coupling that
is used to transmit power from one or more engines or
motors to a driveshaft or other output shaft. It takes the
place of a mechanical clutch, and within certain operating
speed ranges, multiplies input torque, providing the output
equivalent of a reduction gears. Torque converters are
commonly found in automotive transmission system and
also used in marine systems and other various machine
tools.
We have read about manual transmission, system in
which an engine is connected to a transmission by way of
a clutch. Without this connection, a car would not be able
to come to a complete stop without stopping the engine.
But cars with an automatic transmission have no clutch
that disconnects the transmission from the engine. Instead,
they use an amazing device called torque convertor.
4.9.2.1 Torque Converter Gear Box
A torque convertor is a fluid coupling or clutch that
disengages when the vehicle is stopped and transfers power
as engine rpm increases. When the vehicle is in motion
Design of Speed Reducers (Gear Boxes) 4.216
and not under acceleration, the torque converter slips and
transfers power as vehicle speed decreases.
A torque converter, by its very nature as a fluid
coupling also dampens engine combustion pulses to achieve
smoother operation. “Torque converters have never been
considered efficient” because they tend to lose more power
than they transfer by their nature as “fluid coupling”.
4.9.2.2 Torque converter principles
A fluid coupling is an assembly of two element drive
i.e. the impeller and the turbine which is incapable of
multiplying torque, while a torque converter has one extra
element (the stator) in addition to impeller and turbine
which alters the drive’s characteristics during periods of
high slippage, producing an increase in output torque.
The purpose of Torque converter is to transmit
engine torque to the driving wheels. It also increases or
decreases torque to suit varying road and operating
conditions.
In a manual transmission system, the driver
manually selects the appropriate gear ratio to suit.
In an automatic transmission, it is done by both the
transmission control system, automatically selecting the
gearing according to load and speed, and by the torque
converter.
The torque converter is fitted on the engine in the
same place as a clutch, and does the same job as that of
clutch-transmitting engine torque to the input shaft of the
transmission. It also multiplies torque according to
operating conditions.
4.217
Design of Transmission Systems
It is also called as a fluid coupling, since the fluid is
acting as the driving medium and none of the converter
components are physically connected to the others. It acts
as an automatic clutch. At engine idling speeds, the vehicle
is kept stationary by allowing the engine to operate without
transmitting power to wheels.
Tu rbine
S tato r
,m pe ller
Fig.4.6. A Ty pical To rq ue C o nverte r.
Torque converter has basically three elements:
1. The Impeller,
2. Turbine, and
3. Stator.
All the components - impeller, turbine and stator have
curved vanes and are assembled in a single casing but are
separated from each other by thrust bearings. The casing
is filled up with full of fluid like oil.
The impeller is keyed and attached to the converter
casing and both the impeller and casing rotate as a single
member. In simple words, the impeller has a large number
of vanes rotating along with the casing as the engine
rotates. Each vane has a slight curvature and is set radially
Design of Speed Reducers (Gear Boxes) 4.218
outward to the casing. The impeller is acting as a
centrifugal pump. The fluid enters at center and leaves
radially outward and then it enters the turbine and rotates
the turbine.
The turbine has more vanes, with a greater curvature
and is set radially inward. The direction of curvature of
the turbine vanes is opposite to that of the impeller vanes.
The turbine has no direct mechanical link with casing. i.e.,
the turbine is free to rotate in the casing and a central
spline of the turbine mates with a spline on the input shaft.
When the fluid leaving the impeller rotates the turbine,
the input shaft splined with turbine also rotates.
There is a chance of fluid coming out of the turbine
flows in the opposite direction to the impeller and hence
slows down the impeller. Fig 4.7 (a). To avoid this, a stator
is placed in between the turbine and impeller and this
stator changes the direction of flow from turbine and
provides the positive flow to the impeller. Fig 4.7 (b). The
S tator Va nes
P um p
Fig.4.7(a). Torque Con verterOil is Throw n A gainst
Pump Van es.
Turb in e H elping to R ota te Pum p
Turbin e S to pp ing P um p
P um p
P um p
Pu m p
Turbine
Turbine
Fig.4.7. (b ). Torque Con verterOil Path is Changed
by Stator to Aid R otation of Pum p.
4.219
Design of Transmission Systems
Torque C onve rte r H ousin g
(C o nn ects to F lyw hee l
a nd im pello r)
Turbine O u tpu t S ha ft
(C o nn ects to Transm issio n)
Flyw heel
(C o nn ects to
En gine)
Stator O utp ut Shaft
(C o nn ects to F ixed
in Tra nsm issio n)
Turbine
Pu m p(im pe llo r)
( Fixe d to H ou sing )
Stator
Fig.4.8 Torque Con verter Cut Away(Assemb ly)
stator is free to rotate and no mechanical link with turbine,
impeller and casing. The stator has a small set of curved
blades attached to a central hub. The central hub is
mounted on a one-way clutch to allow the stator to rotate
only in the same direction as the impeller.
4.9.2.3 Advantages.
1. Provides noise free operation.
2. Fuel consumption is reduced.
3. Provides simplified driving control.
4. Wear and tear is greatly reduced.
5. Shocks and vibrations are greatly reduced.
6. Despite the efficiency loss, moderate slippage the
torque converter provides a smoother, more even
Design of Speed Reducers (Gear Boxes) 4.220
flow of power by absorbing engine and power
train’s vibrations rather than transmitting to the
output shaft or surrounding equipment.
4.9.2.4 Applications
Automatic transmissions on automobiles such as
cars, buses and trucks.
Forwarders and other heavy duty vehicles.
Marine propulsion systems.
Industrial power transmissions such as conveyor
drives, drilling rigs, construction equipments and
railway locomotives.
Chapter 5
CAMS, CLUTCHES AND BRAKES
Cam Design: Types-pressure angle and under cutting base
circle determination-forces and surface stresses. Design of plate
clutches – axial clutches-cone clutches-internal expanding rim
clutches- Electromagnetic clutches. Band and Block brakes external shoe brakes – Internal expanding shoe brake.
5.1 CAMS: (CAM AND FOLLOWER)
5.1.1 Introduction
In a cam drive, there are two main components, cam
and follower. The cam acts as a driving member and is
made to have miscellaneous boundary (usually curved
shape) surface in order to transmit desired motion to the
corresponding follower (the driven member) by a direct
contact. The cam shape is like a disc with some projection
on its face. The cam transmits the desired motion (linear
or oscillatory) to the follower.
Cams are widely employed in most machineries like
I.C engines, printing machines and other instruments
because of its accurate and efficient transmission of motion,
velocity and acceleration.
5.2
Design of Transmission Systems
To an d fro mo tion
R o ller
To an d fro mo tion
(b)
(a) plate cam (b) w edge cam
(or)
Radial cam w ith Translating follower.
(a)
Fig.5.1
5.1.2 Classification of Cam Mechanisms
Cam Mechanisms can be classified into various types.
(a) Based on input of cam and output of follower
they are of four types.
1. Rotating cam-translating follower mechanisms.
2. Rotating cam-oscillating follower mechanism.
3. Translating cam-translating follower mechanism.
4. Stationary cam-rotating follower mechanism.
(b) Based on the motion of follower it is of three
types.
1. R-R-R (Rise-Return-Rise) Mechanism.
2. D-R-R-D (Dwell-Rise-Return-Dwell) Mechanism.
3. D-R-D (Dwell-Rise-Dwell) Mechanism.
Cams, Clutches and Brakes
5.3
5.1.3 Types of Cam
1. According to the shape
(a) Wedge or flat cam.
(b) Radial or disc cam.
(c) Cylindrical or drum cam.
(d) Spherical
(e) Conical
2. According
to
the
method
of
provision
of
constraint
(a) Spring loaded
(b) Positive drive.
3. According the motion of follower
(a) Uniform velocity.
(b) Simple Harmonic Motion (SHM).
(c) Cycloidal Motion.
(d) Uniform acceleration and retardation.
5.1.4 Type of Cam followers
1. According to the construction of contact surface
(a) Knife edge
(b) Flat faced follower
(c) Roller follower
2. According to the type of moment
(a) Translating
(b) Oscillating
5.4
Design of Transmission Systems
3. According to location of follower
(a) Radial
(b) Off-set
Radial: When the motion of the follower is along
the axis passing through the centre of the cam.
Off-set: When the motion of the follower is along
the axis away from the axis of cam.
5.1.5 Nomenclature of a Cam-Drive
1. Base Circle
The smallest circle drawn to the cam profile from the
centre of rotation of cam. The base circle decides the size
of the cam drive.
2. Cam Profile
This is the boundary curve of the contact surface of
the cam with the follower.
3. Trace Point
It is the point on the follower for the purpose of
tracing the cam profile.
4. Prime Circle
It is the smallest circle drawn to the pitch curve from
the centre of rotation of the cam.
5. Pitch Curve
The imaginary curve obtained when the follower is
assumed to rotate the cam, keeping the cam fixed. It is the
path of the trace point.
Cams, Clutches and Brakes
m axim um
p ressure a ng le
D irection
o f m otion
N o rm al
5.5
D irection of m otion
Follow er
Pitch po int
Tra ce point
Pitch circle
nt
Ta n g e
Cam
profile
Ra
Prim e
circle
Rb
Pitch
curve
rp
Ba se
circle
Fig. 5.2. C am Nom enclatu re.
6. Cam Angle
The angle of rotation of the cam for a definite
displacement of the follower.
7. Pitch Point
It is the point on the cam pitch curve having
maximum pressure angle.
5.6
Design of Transmission Systems
8. Pressure Angle ()
The angle at any point on the pitch curve included
between the normal to the pitch curve and line of motion
of the follower at that instant.
9. Stroke
The maximum displacement of the follower from the
base circle of the cam.
10. Pitch Circle
It is the circle obtained when the centre of cam axis
is taken as its centre and its radius such that it passes
through the pitch point.
11. Transition Point
The point on the cam at which the follower has its
maximum velocity.
12. Pulse or Jerk
It is used to define the instantaneous time rate of
change of acceleration in order to minimise vibration.
5.1.6 Basic Curves
Refer PSG Data book P.No. 7.110 for characteristic
equations of basis curves.
1. Simple polynomial: y c n
When n 1;
straight line y c
When n 2;
parabolic (or) constant acceleration.
y c
2
When n 3;
cubic (or) constant pulse y c 3
Cams, Clutches and Brakes
5.7
2. Trigonometric curves
1. Simple harmonic
2. Double harmonic
3. Cycloidal.
Advantages of Trigonometric curves, over simple
polynomial
1. Smaller cam size;
2. Easier layout;
3. Lower follower side thrust;
4. Low manufacturing cost;
5. Easier duplication.
Problem 5.1: A polynomial cam having n 2.4 rotating at
60 rpm has positive acceleration (i.e., its direction is that of
the positive displacement), part of its rise of 10 mm in 40 of
cam rotation. Find the velocity and acceleration value at the
end of 30 of cam rotation.
(April/May 2008)
Solution
Given Data:
n 2.4
When 40 ; the rise 10 mm y
2N
60
2 60
6.283 rad/sec
60
40
0.6981 rad .
180
Basic equation, y c n
N 60 rpm
... (1)
5.8
Design of Transmission Systems
10 c 0.6981 2.4
c
10
0.6981 2.4
23.69
differentiate the eq. (1) w.r.t. t
Velocity
dy
d
c n
dt d t
[Where t]
v c n n 1
2
Velocity at the end of 30 of Cam rotation
v 23.69 6.283 2.4 30
180
2.4 1
v 144.39 mm/sec
Differentiate the eq. (2) w.r.t. t
Acceleration
d 2y
dt 2
c 2 n n 1 n 2
23.69 6.283 2.42.4 1 30
180
2
2.4 2
Acceleration at the end of 30 of Cam rotation
2420 mm/sec 2
Cam Curvature
If radius of roller radius of curvature of pitch
surface, then the profile is satisfactory. (i.e. No
under cutting).
Rr Pk
No und er cutting
Cams, Clutches and Brakes
5.9
If radius of roller radius of curvature of pitch
surface, then the cam profile results under
cutting.
Rr Pk
U nder cutting results
If roller radius radius of curvature of pitch
surface, a pointed cam profile results.
A pointed cam will not give desired motion. (Refer
PSG Databook Page No. 7.114)
To Avoid Under cutting
Flat follower P c
1 d 2y
Rb y 2 2
min
dt
0
to avoid under cutting
Roller follower
Pk
min
1 dy
R p y2
dt
32
2
1 d 2y
1 dy
R b y 2
R p y 2
dt
dt 2
2
Rr
2
to avoid under cutting
For y, at point of maximum negative acceleration.
where P c radius of curvature of the cam profile
P k radius of curvature of the pitch curve
R b base circle radius;
R p prime circle radius
5.10
Design of Transmission Systems
y follower displacement;
2N
;
60
R r radius of the roller
dy
d 2y
Velocity;
A cceleration
dt
dt 2
[For velocity and acceleration equations, refer PSG
databook (Page No. 7.110) according to the type of curve]
Under cutting in Cams
When a cam has a sharp point (corner) the follower
does not undergo an abrupt change of motion, but gradually
assumes a different velocity. If the roller radius is greater
than the theoretical pitch curve at the convex portion of
the cam, the roller undercuts, i.e. moves itself over the
same path twice. This phenomenon is called undercutting.
Problem 5.2: A radial cam rotating at 150 rpm is driving 15
mm diameter translating roller follower to produce the
following motion, rise of 25 mm with SHM in 150 degrees of
cam rotation, dwell for 60, fall 25 mm with SHM in 120 of
cam rotation and dwell for remaining 30. Construct the cam
contour.
(a) with pressure angle limited to approximately 20.
(b) with the pressure angle limited to exactly 20
(April 2007)
Solution: (a) Approximate pressure angle:
For SHM, the position of transition point is at
150
i.e.
2
2
At 75, locate transition point and pitch point
Cams, Clutches and Brakes
5’
6’
f
e
f’
e’
d
4’
d’
c
25 3’
mm
c’
b
2’
b’
a
1’
0
5.11
a’
1
2
3
4
o =15 0
5
P
6’ 5’ 4’ 3’ 2’ 1’ 0’
6
o
d 1
R
d 2
Displacem en t Diagram
Pitch circle radius R p
Rp
Take
pitch
fh
4.315 25
41.2 mm.
5
6
circle
h rise 25 mm ; 150
radius
as
42
mm
;
5
rad
180 6
CAM PROFILE (Procedure):
1. Draw pitch circle with a radius of 42 mm with Q
as centre
2. Locate Transition Point and Pitch point (P)
3. Divide cam angle of rise 150 into equal number
of parts (say 6) on either side of the point P. (3
equal parts on each side of P.
4. Draw the radial lines
Q0, Q 1, Q 2, Q 3, Q4, Q 5 and Q6.
5. With P as centre and 25 mm (rise of follower) as
radius, draw a semi-circle.
Design of Transmission Systems
5.12
6. Divide the semi circle into same number of equal
parts (i.e., six). Mark the point as 0, 1, 2, 3, 4, 5
and 6.
7. Take Q 0 as radius and Q as centre, draw arc on
the radial line Q 0 and get 0. Similarly Q1 radius,
Q as centre draw an arc on the radial line Q1
and get a similarly.
8. Similarly,
draw
arcs,
with
radius
Q2, Q3, Q4, Q5 and Q 6, interest the respective
radial lines, Q 2, Q3, Q4, Q5, and Q 6, to get
b, c, d, e and f respectively.
R o ller
Follow er
5’
3’
4’
4
d
M otio n o f
Follow er
Tra nsitio n a nd
Pitch P oint (P)
2’
6
5
3
P
2
e
c
b
1
1’
0
6’
1 50
f
75
60
Cam
Pro file
75
o
Q
o
a
o
0’
o
o
30
o
0”
1 20
a’
o
Pitch
C u rve
b’
6”
c’
f’
e’
5”
Pitch
C ircle
o’
d’
1”
2”
3”
4”
o
(a) Pressure An gle Limited to Appro ximately 20
Cams, Clutches and Brakes
5.13
9. Draw a smooth pitch curve passing through 0, a,
b, c, d, e and f to get pitch curve.
10. With centers 0, a, b, c, d, e and f, draw circles
with radius equal to roller radius.
11. Draw the cam profile (Tangential curve to the
roller circles).
12. Repeat the same procedure during fall and dwell
periods.
(b) Exact pressure angle method:
For SHM, R p Pitch circle radius
P
h sin
Rp
p
2 cos
and
2
m 20
150
150
p
m tan 1 cot
p
20 tan 1
cot
150
150 180
180
tan 20 1.2 cot 1.2 p
cot 1.2 p
0.36397
0.3033
1.2
1
0.3033
tan 1.2 p
tan 1.2 p 3.29697
1.2 p tan 1 3.29697
ra d
180
5.14
Design of Transmission Systems
1.2 p 73.12
p 60.03 61
Rp
60.93
25 sin
150
180
2
60.93
2cos
150
180
39.149 mm
h 25 mm
Take R p 40 mm
y
h
1 cos
2
61
25
8.88 mm
1 cos
2
150
180
Take y 9 mm
CAM PROFILE
Procedure
1. With Q as centre draw a pitch circle with a radius
of 40 mm R p
2. Locate pitch point P.
3. Draw a radial line Q 0 at an angle of 61 p
^
i.e. P Q 0 61.
4. Mark 150 cam angle with Q 0 as reference and
divide into 6 equal number of parts and draw
radial
lines.
Name
the
points
as
1, 2, 3, 4, 5, and 6.
Cams, Clutches and Brakes
5.15
5. Locate y 9 mm below the pitch point at M. i.e.
(PM 9 mm ).
6. With Q as centre Q M as radius, draw an arc on
line Q3, which intersects at 0.
7. From 0 mark the rise 25 mm . Draw a semicircle
with radius 25 mm, divide the semicircle into
same number of equal parts (six), name the points
as 0, 1, 2, 3, 4, 5 and 6 and project on the Q3
line.
m =2 0
3’
4
Follow er
M otio n
5’
P
d
R o ller
Follow er
3
Pitch P oint (P)
1’
P
2
1
0 M
9 mm
b
a
61
o
6’
30
f
0’
0
15
0o
e
c
Tra nsitio n P oint
2’
6
5
4’
o
o
Pitch
C ircle
R P = 40 m m
O”
60
o
Pitch
C u rve
1”
a’
o
120
Cam
Pro file
b’
2”
c’
f’
e’
6”
d’
4”
5”
(b) Pressure Angle Lim ited to E xactly 20 o
3”
5.16
Design of Transmission Systems
8. With Q as centre and radius as Q0, draw an arc
on the radial line Q 0. Name this point as 0.
9. Similarly locate a , b , c , d, e and f
10. With 0, a, b, c , d, e and f, as centers, draw circles
with radius equal to roller radius.
11. Draw a smooth pitch curve passing through
0, a , b, c , d, e and f .
12. Draw the cam profile, i.e. tangential curve to
the roller circles
13. Repeat the same procedure during fall and dwell
periods.
5.14 Simple Harmonic Motion SHM
2
a
when 0;
h
cos
2
Acceleration is maximum positive
when Acceleration is minimum negative
when
Acceleration is zero.
2
Cycloidal: When
Acceleration is maximum.
4
Parabolic: When
Acceleration is maximum.
2
Cams of Specified Contours
For accuracy of profile, and cheapness of manufacture,
profiles should be formed of circular arcs and straight lines,
then the motion of the follower can be calculated. This type
of cams are known as “cams of specified contours”.
Cams, Clutches and Brakes
5.17
I. Circular Cam with Flat Follower
When the flank of the cam are connecting the base
circle and nose arc of convex circular arc, then the cam is
known as Circular Arc Cam.
II. Tangent Cam with Roller Follower
When the flank of the cam are straight and tangential
to the base circle and nose circle, then the cam is known
as a Tangent Cam. (These cams are used for operating
the inlet and exhaust valves of internal combustion
engines).
Circular Arc Cam with Flat Follower
r 1 Base circle radius;
r 3 Flank radius;
r 4 Nose radius;
Cam angle for displacement ‘y’
1 Cam angle for acceleration
2 Cam angle for lift.
Distance OD radius r 5:
Refer PSG data book, Page No. 7.118
0 1 A to B
Flank
Displacement
y r 3 r 1 1 cos
Acceleration
y a 2r 3 r 1 c o s
when 0;
a is max.
a max 2r3 r1
Design of Transmission Systems
5.18
Flank
B
N ose
r4
D
C2
r3
r5
A
2
r1
O
Base circle
1
Fig. 5.3 Circular Cam w ith Flat Follow er.
C1
1 2 B to D
Nose
y r 4 r 1 r 5 r 4 cos 2
a 2r 5 r 4 c o s 2
Put 2
a min 2r5 r4
Cams, Clutches and Brakes
5.19
Line diagram
B
A
r4
D
r3
C2
r
r5
3
O D =r 5
O
1
Fig. 5.4
C1
a
y
v
N o se
Flank
= cam a ng le for position
Fig. 5.5
5.20
Design of Transmission Systems
B
r4
c2
y
y
r4
A
r1
c2
D
2
r3
r3
r1
o
D
o
1
1
B
A
(a)
D
C2
c1
(b)
o
c1
r 3 =C B
CA
L r5
(=O D )
C 1 (c)
Fig. 5.6 Circular A rc Cam with Flat F aced Fo llo wer.
r2
B1
A1
S
y
A
B D
r4
B1
D1
A1
B
c2
A
r1
L rs
(=O D )
o
s
y
r2
r1
D1
D
r4
c2
r 5 =O D
o
(a)
Fig. 5.7 Tangent Cam with Ro ller F ollower
(b)
Cams, Clutches and Brakes
F
r2 s
B1
r4
A1
r1
D1
D
B
y
A
5.21
c2
r3
r5
o
Fig. 5.8
C1
C ircular A rc C am w ith R o lle r Fo llo w er
Problem 5.3: The following data refers to a circular cam
which operates flat faced follower; Least radius 50 mm. Total
lift 25 mm. Flank radius 150 mm. Angle of lift 70 degrees;
Calculate the principal dimensions of the cam and draw the
cam profile.
r 1 Least radius 50 mm
r 3 Flank radius 150 mm
Lift 25 mm
2 Angle of lift 70
From the diagram,
C 1C 2 r 3 r 4
150 r 4
... (1)
5.22
Design of Transmission Systems
O C1 r 3 r 1
150 50 100
... (2)
O C 2 r 1 lift r 4
50 25 r 4
75 r 4
AOC 2 70, Therefore, C 2O C 1 110
... (3)
Using Cosine Rule
C 1C 22 OC 21 O C 22 2O C 1 O C 2cos 110
150 r 42 100 2 75 r 42 2100 75 r 4 c o s 110
150 r 42 75 r 42 100 2 68.4 75 r 4
150 2 300r 4 r 24 75 2 r 24 150r 4 100 2 68.475 r 4
16875 150r 4 100 2 5130 68.4r 4
16875 15130 150 r 4 68.4r 4
1745 81.6 r 4
r4
1745
21.38 mm
81.6
Nose radius r 4 21.38 mm
r 5 O C2 r 4
53.615 21.38 74.99 mm
r5 75 mm O D
To find 1,
Apply sine rule,
From eq. (3)
OC2 75 21.38 53.615 mm
54 mm
Cams, Clutches and Brakes
OC 2
sin 1
C 1C 2
5.23
C 1C 2 r 3 r 4
sin 110
= 150 - 21.38
128.62
53.615
sin 110
sin 1
= 128.62 mm
25
B
D
Li
ft
=
r4
r3
=
15
C2
0
70
-
r5
E
o
=7
2
r1
=
0
o
50
O
11O
A
C1
5.24
Design of Transmission Systems
sin 1
53.615
sin 110 0.3917
128.62
1 sin 10.3917 23
1 23
The principal dimensions are,
r 4 21.38 mm;
r 5 75 mm
1 23
Cam Profile: (With Dimensions)
r1 = 5 0
=
O
70 o
11 0 o
r3 =
r4 =
15
0
47 o
21
B
C
2
D
=
C
1
23 o
Cams, Clutches and Brakes
5.25
Problem 5.4: The following data refers to a cam operating
the suction valve of a 4-stroke petrol engine, least radius
18 mm; Lift 10 mm; Nose radius 3 mm; Crank angle when
the suction valve opens before TDC 4; Crank angle when the
suction valve closes after BDC 50; Cam shaft speed 80 rpm.
The cam is a circular type with circular nose and flanks.
Calculate: 1. Maximum acceleration and retardation of the
valve.
2. Minimum force to be exerted by the spring to overcome
inertia of the valve parts whose mass is 250 grams. (Nov 2013)
Given Data:
4-stroke petrol engine;
r 1 L east radius 18 mm ; Lift 10 mm ;
r 4 Nose radius 3 mm
Crank angle when suction valve opens before TDC 4
Crank angle, when suction valve closes after BD C 50
Cam shaft speed 80 rpm
Refer PSG Data book Page No. 7.118
Circular arc cam - with flat speed follower
A to B
- Acceleration a 2r 3 r 1 cos
when 0 ; acceleration is maximum.
a max 2r 3 r 1 [Refer Fig.]
But r 3 r 1 OC 1 Calculate OC 1
Design of Transmission Systems
5.26
A
r1
O
=5 8 .5
o
(18 0-5 8.5 )
r3
r5
B
r4
C2
D
1
C1
B to D
- Retardation 2r 5 r 4 cos 2
put 2
But r 5 r 4 O C 2
a 2r 5 r 4
Calculate OC 2
Step 1.
Find OC 1 and OC 2
OC 2 r 1 lift r 4
18 10 3 25 mm
C 1C 2 r 3 r 4
OC 1 r 1 r 4
O C 1 18 3 O C 1 15
Cams, Clutches and Brakes
Su ctio n Valve
O pen s
4
5.27
TD C
o
1 80 +5 0+ 4= 23 4 o
50
o
Su ctio n
Valve C loses
BD C
Angle of crank rotation during suction 4 180 50
234
For 4-stroke cycle engine,
Speed of cam shaft
1
speed of crank shaft.
2
(Therefore cam angle is also
22
1
angle of crankshaft)
2
234
117
2
Cam angle for lift 2
117
58.5
2
5.28
Design of Transmission Systems
Consider triangle O C 1C 2, apply cosine law
C 1C 22 OC 21 OC 22 2O C 1 O C 2 cos 180 58.5
15 O C 12 O C 21 25 2 2 O C 1 25 cos 121.5
225 30O C 1 O C 21 O C 21 625 2OC 1 25 cos 121.5
Simplify,
r 1 18 mm
O C 1 103.36 mm
r 4 3 mm
C 1C 2 O C 1 15 103.36 15
lift 10 mm
118.36 mm
Step 2.
To Find 1
Apply sine rule,
OC 2
sin 1
C 1C 2
sin 121.5
25
118.36
sin 1 sin 121.5
1 10.4
Step 3.
Acceleration is maximum
a max 2r 3 r 1
103.36 18
121.36 mm
2
2 80 121.36 18
60
1000
7.254 m/sec
r 3 O C 1 18
2
N 80 rpm
2N
60
Cams, Clutches and Brakes
5.29
Step 4.
Retardation
2
2 80
25
a min O C 2
1000
60
2
1.754 m /sec 2
Step 5.
Minimum value of force F min m accelerationmin
m 250 gram
0.25 1.754 0.44 N
5.1.7 Designing CAM
Consideration
The following points should be considered.
1. The rise should be kept as small as possible and
achieved in the lowest possible time.
2. Backlash should be kept to a minimum.
3. The moving parts should be as rigid and light as
possible.
4. The pressure angle should be kept as low as
possible (upto 30). In order to reduce the
pressure angle, off-set may be provided between
the cam and follower.
5. The accuracy of the cam is important to avoid the
vibration effects and therefore care should be
taken to produce cam profile.
5.30
Design of Transmission Systems
Procedure
Step 1.
From the given data, note down all the given
information like the load to be lifted, torque supplied, etc,
and then find the type of cam, follower and its motion
based on the lift, velocity and acceleration required. Also
select proper material to be used for cam and follower.
Step 2.
By assuming proper pressure angle, calculate the
prime circle radius of the cam.
Step 3.
Calculate the minimum radius of curvature of the
pitch curve by using formula (or) design chart and finalise
the radius of follower and base circle of cam.
Step 4.
Using lift and cam angles draw the displacement angle diagram and then draw the cam profile.
Step 5
Find the width of the face of cam based on the contact
strength of cam material.
Step 6.
Find the dimensions of the follower with respect to
their withstanding strengths, space limitation, etc.
Step 7.
Evaluate the spring parameter such as stiffness,
spring index and length by using suitable formulae.
Cams, Clutches and Brakes
5.31
5.1.8 Cam Profile Layout
The cam profile can be drawn by graphical method if
the displacements for different cam angles are clearly
specified.
To draw a cam profile, the following points are to be
considered.
1. The displacement time diagram is always given
for a point on the follower which is utilized to
draw the follower in its correct position at any
instant.
2. The cam profile will always be tangent to the
follower and will thus be determined by the
envelope of the follower profiles drawn in
successive position.
3. Cam profile has to be drawn on the basis of
principle of inversion i.e, cam should be kept fixed
and the frame carrying the follower is to be
rotated in the opposite direction to that of cam.
5.1.9 Pressure angle : (Refer Fig. 5.9)
Pressure angle is the angle between the follower
motion and a normal to the pitch curve. This is very
important angle for cam design, as its maximum value
establishes the cam size, torque loads, side thrust wear and
acceleration of follower, etc.
Due to the angle between the follower motion and a
normal to the pitch curve, the normal force F n may be
resolved
into
two
components
F n cos
and
F n sin .
F n cos is used to lift the follower and F n sin to produce
a side thrust on the guide of the follower.
Design of Transmission Systems
5.32
Ca m Fo rce
N o rm al N 2
Pre ssure A ngle
Su rfa ce/Pitch
C u rve
y
A Rr
c le
Rp
P it
ch
C ir
h
Ca m Fo rce F n
Rb
R
F orce requ ire d to
lift th e follo w er
Fn Cos
Rp
In itital
Po int
Ba se
C ircle
Cam
p rofile
Fig.5.9 (a)
Fo rce on th e guide,
F n Sin
Fig.5.9 (b)
The allowable value of is influenced by the speed
of operation and weight of connected part. The pressure
angle can be determined by using the formula.
tan
Where,
R
1 dy
R d
Distance of trace point from the centre of
cam.
The trace point displacement R is given by
R Rp y Rb Rr y
Where,
Rp
Prime circle radius
Rb
Base circle radius
Rr
Radius of the roller of follower
y
Follower option.
Cams, Clutches and Brakes
For
parabolid,
harmonic
and
cycloidal
cams, the prime circle
radius can be evaluated
using the formula assuming
maximum pressure angle as
dy
dt
max
tan max
R p y
Suppose if offset is
provided for the follower
(Fig. 5.10) then pressure
angle is given by
tan
Where y
5.33
Pitch
C u rve
y’
Rp
e
o ffset
Fig. 5.10
y e
R 2p e 2 y
dy
d
and e offset distance
5.1.10 Under Cutting
When a cam has a sharp point, the follower does not
undergo an abrupt change of motion, but gradually
assumes a different velocity. If the roller radius is greater
than the theoretical pitch curve at the convex portion of
the cam, the roller undercuts, i.e., move itself over the same
path twice, this phenomenon is called under cutting.
Therefore, as long as the minimum radius of the
curvature of the pitch curve P k is greater than the radius
5.34
Design of Transmission Systems
of the roller R r the profile will be satisfactory and the
desired displacement may be obtained.
P k R r (No under cutting)
If P k min R r, then the profile will be a pointed one.
If P k min R r, then the cam will have an undercut
which should be avoided.
To avoid under cut
For Flat Follower
1 d 2y
P C min R b y 2
dt 2
0 (to avoid under cutting)
Where P C min radius of curvature of cam profile
For Roller Follower
P k min
1 dy
R p y2
dt
2
3/2
2
1 d 2y
1 dy
R b y 2
R p y 2
dt
dt 2
2
R r to avoid under cutting
For y at point of maximum negative acceleration.
where
2 N dy
velocity
,
dt
60
and
d 2y
dt 2
Acceleration.
Cams, Clutches and Brakes
5.35
[For velocity and displacement equation refer PSG
data book Pg No. (7.110)
5.1.11 Contact Stress
A compressive stress is induced in the contact line
during the force transmission between cam and follower
and this stress is called contact stress.
Hence the materials selected for the manufacturing
of cam and follower should have sufficient endurance limit
and hardness.
The induced contact stress ‘c’ between cam and
follower (roller) is given by the equation.
c 0.591
F n E 1 E2 1
1
b [E 1 E 2] R r P Cmin
Note: Minus sign is used when the follower is in
contact with concave portion of the cam profile.
where,
Fn
Normal force at the point of contact.
E 1, E 2
Moduli of
follower
b
Face width of cam
P C min
Minimum radius of curvature of cam
profile
P C min P Kmin R r
elasticity
of
cam
and
5.36
Design of Transmission Systems
W
al
N 1
R ising
5.1.12 Force Determination
No
rm
N1
B
F n cos
Fn
A
N 2
Fn
N2
F n sin
L ifting F orce =F n cos
Side Thrust =F n sin
Fig:5.11
In the Fig. 5.11, W is the external force, which is the
sum of inertia force and spring force that acts against the
direction of motion of the follower. Therefore the power
supplied should be in such a manner that the torque
produced should develop the lifting force F , which should
be greater than the external force.
The torque required to drive the cam is given by
T
Fv F n cos v
and the normal force F n is obtained by
(here F
Cams, Clutches and Brakes
Fn
5.37
W
2A B
cos h
sin
B
Where
Co-efficient of friction.
A
Overhang length.
B
Follower bearing length.
Note: Parameters
like
spring
dimensions
determined based on the given condition.
are
Problem 5.5: A cycloidal cam with a central roller follower
has a rise of 25 mm in angle of 70. Base circle radius is 80
mm and the follower roller radius is 20 mm. Speed of rotation
of the cam is 5000 rpm. Mass of the follower is 0.5 kg. Find
the
maximum
value
of
acceleration
of
the
follower,
corresponding pressure angle, stiffness of the spring used with
the follower and maximum cam force. The function between
the follower guide may be ignored.
(Nov/Dec 2007 - AU)
Given data
h 25 mm
70 70
Base circle radius r b 80 mm
Follower radius r r 20 mm
Speed
N 5000 rpm
m 0.5 kg
rad
180
5.38
Design of Transmission Systems
Solution
From P.S.G. Data book Pg. No.7.110 for cycloidal
cam, the rise ‘y ’ of the cam is given by.
y
h 1 sin 2
2
Differentiating we get the velocity (From P.S.G data
book Pg.No.7.110)
h
2
dy
v
1 cos
d
w.k.t for cycloidal cam, acceleration is maximum
(Refer PSG Data book P.G.No. 7.110)
when
0.25
y
25 1
2 sin 2
1
y 25 0.25
sin 2 0.25
2
y 25 0.25 0.00435
y 25 0.2456
y 6.14 mm
and
v
h
dy
1 cos 2
d
Cams, Clutches and Brakes
we know that angular velocity is given by
2N
60
2 5000
60
523.59 ra d/sec
25 523.59
dy
[1 cos 2 0.25
d
70 180
13089.75
[1 0.2484]
1.221
10720.91 0.7516
8057.53 mm/sec
From P.S.G Data book Pg. No.7.113
dy
d
Pressure angle tan
Rp y
But
Rp y r
tan
1 dy
r d
or
1 dy
tan 1
r d
W.k.t
5.39
5.40
Design of Transmission Systems
R p R b Rr
80 20
100 mm
r 100 6.14 mm
r 106.14 mm
1
tan 1
8057.53
106.14
89.2
Now maximum value of follower acceleration by the
equation (Refer P.S.G Data book Pg.No.7.110)
d 2y
2 h 2
2
sin
A fmax
2
2
d m ax
A f max
2 25 10 3 523.3 2
1.22172
sin 2 0.25
28819.88 sin 2 0.25
28819.88 0.0273
788.53 m/s2
But inertia force
F 1 m f A f max
0.5 788.53
394.265 N
The inertia force is maximum 394.265 N but acts
upward. If the spring does not exert a force greater than
Cams, Clutches and Brakes
5.41
394.265 N, then contact between roller and cam will be
lost, therefore spring force has to be set atleast 394.265 N.
w.k.t the compression of spring for the follower rise
from lower most portion to the present level at 0.75
y 25 [0.75
1
sin 2 0.75]
2
25 [0.75 0.1591 sin 4.712 ]
25 0.7369
18.42 mm
Required minimum stiffness of the spring
k
F1
y
394.265
18.42
21.40 N/mm
Cam forces
At any instant, both inertia force and spring force are
acting on the cam. During the phase cam rotation when
varies from 0.5 to 1, the total force on the follower, F is
the difference between the inertia force (upward) and the
spring force (downward). Hence the maximum force during
this phase is due to spring force and this occurs, when the
follower reaches the highest portion i.e 1
5.42
Design of Transmission Systems
F n max F s h k
25 21.40
535 N
When
from downward these two forces donot reach
their maximum at the same time. Therefore it is necessary
to calculate both the forces and obtain their sum for
different values of
1.
0 ; y 0 ; Fs F1 0 ; 0
2.
0.25 ; y 6.14 mm
F s 6.14 21.40
131.39 N
and
F 1 394.265 N and
89.2
F 394.265 131.39
525.661 N
3.
0.375 , 18.15
1
y 25 0.375
sin 2 0.375
2
6.56 m
Cams, Clutches and Brakes
5.43
F s 21.40 6.56 m
140.384 N
F1 m f
d 2y
2
sin 2
m
h
2
f
2
2
d
0.5 2 25 10 3 523.3 2 sin 2 0.375
1.22172
592.4 N
F 592.41 140.384
732.794 N
4.
d 2y
0.5, y 12.5 mm ,
0
d
F s 12.5 21.46
267.5 N
F1 0
F F s F 1 0 267.5 N
F 267.5 N
dy
25
[1 c o s 2 0.5]
1.2217
d
20.46 [0.5030]
10.29 mm/ra d
r 100 12.5
112.5
5.44
Design of Transmission Systems
1
10.29
tan 1
112.5
5.22
The normal force acting between follower and guide
1. F n 9 for
0
2. F n
525.661 N
37648.9 N for 0.75
cos 89.2
3. F n
732.794 N
cos 18.15
15128 for
4. F n
0.375
267.5 N
cos 5.22
268.61 N for
0.5
Thus we find
F n max 37648.9 N
Problem 5.6: A radial cam rotates at 1200 rpm with the
follower rising 20 mm with SHM is 150 of cam rotation. The
roller is 32 mm in diameter and the prime circle is 80 mm in
diameter. Check whether under cutting will occur.
Solution
W.k.t
To avoid under cutting
Cams, Clutches and Brakes
P K min
1 dy
R p y2
dt
2
5.45
3/2
2
1 d 2y
1 dy
R p y 2
R p y 2
dt 2
dt
2
2
Also
1 d 2y
h
2
2
2
dt
max
at
150
180
2.62 radian
At
, y 20 mm, a nd
P K min
1 dy
0
dt
40 202 02
3/2
40 202 2 02 40 20 14.38
Assume
R p 40 mm
R r 16 m
P K min 48.4 mm
We find P K min R r
Hence there is no under cutting.
Problem 5.7: A cycloidal motion cam has the following data
h 25 mm, 60, max 38. Calculate the minimum radius
of the base circle if the radius of the roller is 6 mm. Also
5.46
Design of Transmission Systems
calculate the amount of offset that is necessary to reduce the
maximum pressure angle to 25
Solution
Calculate the minimum base circle radius R b
Rb Rp Rr
Given data
Radius of roller R r 6 mm
w.k.t
dy
dt
max
2h
tan max
h
R p y
Rp 2
tan max
60
tan 38
tan 30
2 25
25
R p 2 60
3
180
3 60
2 25
25
Rp 2 3
150
R p 12.5
R p 48.6 mm
R b R p R r 48.6 mm 6 mm
R b 42.6 mm
Cams, Clutches and Brakes
5.47
Now find the offset (e) required to reduce the pressure
angle.
tan
tan 25
tan 25
0.4663
2h
e
R 2p e 2
dy
e
d
R 2p e 2 y
h
2
2 25
e
25
48.62 e 2
2
47.75 e
2361.9 e 2 12.5
solving by trail and error, we get
e 22 mm, and
24.75
5.2 CLUTCHES
5.2.1 Definition
A clutch is a device used to engage and disengage
the driving shaft to the driver shaft according to the
requirement. In case of automobiles, the clutch is required
during changing of gears. By operating a lever, the clutch
engages and disengages the driver and driven shafts. While
changing gears, the driven shaft should be disengaged from
the driving shaft.
5.48
Design of Transmission Systems
5.2.2 Classification of Clutch
Clutches are classified in two ways, based on
1. Method of energy transfer (actuation).
2. Method of engagement.
According to the method of energy transfer, the
clutches are categorised into
1. Mechanically actuated clutches.
2. Hydraulically actuated clutches.
3. Pneumatically actuated clutches.
4. Electrically actuated clutches.
According to the method of engagement, clutches are
categorised into
1. Friction clutches.
2. Positive contact clutches.
3. Over running clutches.
4. Magnetic clutches.
In this book, mechanically operated
especially friction clutches are discussed.
clutches,
The actuating force or the force required to engage
the clutches is supplied mainly by springs.
5.2.3 Working principle of friction clutch
The principle of transmission of power is by
contacting friction surfaces, to develop frictional force and
this frictional force is used to start the driven shaft from
rest and gradually increases the speed without slipping. In
case of automobiles, the friction clutch is used to engage
the engine shaft to the driven shaft.
Cams, Clutches and Brakes
5.49
5.2.4 Material for friction surface
The materials used for lining of friction surfaces
should have the following properties.
1. The material should have high coefficient of
friction.
2. The material should withstand high temperatures
caused during operation.
3. The material should have high heat conductivity,
high resistance to wear and should not be effected
by moisture or oil.
5.2.5 Types of friction clutches
1. Disc or plate clutches.
(a) Single disc clutch
(b) Multiple disc clutch
2. Cone clutches.
3. Centrifugal clutches.
5.2.6 Advantages
clutch.
and
Disadvantages
of
friction
Advantages of friction clutches.
1. They have a very little shock during engagement
as they can slip relative to each other.
2. It can be used for high speed engagement
applications.
Disadvantages of friction clutches
1. They are not suitable for application that require
positive transmission because they do slip.
2. Replacement of friction material is often required
as they wear out.
5.50
Design of Transmission Systems
3. External cooling is required as they generate heat
during engagement.
5.27 Design considerations for friction clutches
1. Sufficient torque transmitting capacity.
2. Light weight.
3. Smooth engagement without
disengagement with drag.
shock
and
fast
4. Proper friction material (high co-efficient of
friction) that should not be affected by moisture
and oil, etc.
5. Provision for taking up wear of the contact
surfaces.
6. Provision for transmission of heat which is
generated during operation.
5.28 Design of a Disc (or) plate clutch
Consider two friction surfaces
Single d isc
o r plate
dx
p
r1
r2
r2
x
W
r1
p
Frictio n surfaces
Fig.5.12(a)
Fig.5.12(b)
Forces on a D isc Clutch.
Cams, Clutches and Brakes
5.51
Let,
W
Axial thrust,,
p
Intensity of axial pressure,
r1
External radius of friction disc
r2
Internal radius of friction disc.
r
Mean radius of friction disc
Coefficient of friction
Ft
Frictional torque transmitted by the clutch
For more details, refer Dynamics of machines by Dr.
S. Ramachandran
Consider the following two conditions
1. Uniform pressure distributed over the entire area
of the friction surface.
2. Uniform axial wear due to the sliding friction.
1. By considering uniform pressure
Intensity of pressure p
W
r21 r22
r3 r3
2
1
2
Total frictional torque Ft W 2
2
3
r1 r2
Ft W r
where r = mean radius of the friction surface
3
3
2 r1 r2
r 2
3 r r2
1
2
... (1)
5.52
Design of Transmission Systems
2. By considering uniform wear
Let p Intensity of pressure
x radial distance from axis of the clutch
Intensity of pressure varies inversely with the radial
distance x ;
p
1
or p. x constant
x
(a) The intensity of pressure is maximum at inner radius
r2
pmax r2 C
or pmax
C
r2
(b) The intensity of pressure is minimum at outer radius
r1
pmin r1 C
or
pmin
C
r1
(c) The average pressure is given by,
paverage
W
r21 r22
1
Total frictional torque Ft W r1 r2
2
Wr
Cams, Clutches and Brakes
5.53
where r mean radius of the friction surface
r1 r2
2
(d) Axial thrust W 2 C r1 r2
In general
The total frictional torque acting on the clutch F t
Ft n W r
w here n no. of pairs of contact surfaces
coefficient of friction
r1 outer radius
W axial load
r2 inner radius
3
3
2 r1 r2
r mean radius 2
for uniform pressure
3 r r2
2
1
1
r1 r2 ... for uniform wear
2
Note:
1. For a single plate or disc clutch, n 2 (both sides
of the plate are effective)
2. For a multiple disc clutch
n n1 n2 1
where n 1 no. of discs on driving shaft
n2 no. of discs on driven shaft.
Problem 5.8 A single dry plate clutch is to be designed to
transmit 10 HP. at 900 rpm. Find (a) diameter of the shaft,
(b) mean radius and face width of the friction lining assuming
5.54
Design of Transmission Systems
the ratio of the mean radius to the face width as 4, (c) outer
and inner radii of the clutch plate. Take y for the shaft
material as 38 kg/mm2
(Nov/Dec - 2009)
Power 10 HP 7.36 kW
Speed N 900 rpm
Refer P.S.G Data book, page No. 7.89
(a) Diameter of shaft d
where
3
495000 kW kw
N []
kW
rated power 7.36 kW
N
rpm of the drive N 900 rpm
kw
factor based on working conditions
k1 k 2 k 3 k 4
[]
Allowed shear stress
Since working conditions are not given,
Assume k 1, k2, k 3, and k4 values
From P.S.G Data book, Page No. 7.90 take
k1 0.5 ; k2 1.25 ; k 3 0.32 and k4 0.75
kw k1 k2 k3 k4
kw 0.5 1.25 0.32 0.75 2.82
Assume, material of shaft as C50;
y 38 kgf/mm 2 ; FOS 2
[] Allowable shear stress
Cams, Clutches and Brakes
y
2
5.55
1
FOS
38 1
9.5 kg f/mm 2
2
2
[] 950 kgf/cm2
Diameter of clutch shaft
d
3
495000 7.36 2.82
2.29 cm o r 2.3 c m
900 950
d 23 mm
(b) Let b face width
rm mean radius
b
rm
4
(given)
Refer PSG data book Page No 7.89
im
[M t]
2 P b b r2m
W.k.t For single plate clutch im 2
where, im Number of friction surfaces
From PSG data book, Page No. 7.89, allowable
pressure Pa k. P b
where k speed fac to r 1 (assume)
and P b basic pressure
running)
2.5 to 3 kg f/cm 2 ( for dry
5.56
Design of Transmission Systems
Take P b 3 kg f/cm 2
coefficien t of friction 0.25 Assume
From PSG Databook, Page No. 7.8
71620 HP 71620 10
795.77 kg f c m
N
900
Mt
[M t] M t k
w 795.77 2.82 2244.07
Design torque
2244 kg f cm
im
2
Mt
2 Pb b r2m
2244
rm
0.25 r2m
23
4
r3m
2244 4
3
rm
952.38117
2 3 0.25 2
rm 9.8 c m or 98 mm
Mean radius
rm 98 mm
(c) To find ri inner radius and ro outer radius
b face width of the plate
ro r i
ro ri
rm
4
98
24.5
4
b 24.5 mm
... (1)
Cams, Clutches and Brakes
But rm
ro ri
2
5.57
98
ro ri 98 2 196
... (2)
By solving eq. 1 and eq. 2 we get ro 110.25 mm and
ri 85.75 mm
Inner radius of the clutch plate ri 85.75 mm
Outer radius of the clutch plate ro 110.25 mm
Problem 5.9: Design a suitable clutch for scooter of 150 C.C.
Axial thrust is to be provided by suitable helical springs. At
maximum torque, the power developed is 4 kW at 3200 rpm.
Space restricts the outer diameter of the clutch to be 150 mm
[May/June - 2008]
At maximum torque developed,
Power P 4kW and
Speed N 3200 rpm
The outer diameter do 150 mm
The outer radius r0
d0
2
75 mm
From PSG databook, Page No. 7.94 according to the
maximum torque, the ratio of inside diameter is varying
from 0.72 to 0.84.
Assume inner radius 0.8 outside radius
ri 0.8 r0
Refer PSG data book, Page No 7.89
Transmitted torque M t
97400 kW
N
5.58
Design of Transmission Systems
97400 4
3200
121.75 kg f c m
Number of friction surfaces
i m1 m 2 1
where, m 1 no. of driving plates.
m 2 no. of driven plates
imin
[M t]
2 P b b r2m
where [M t] Design torque kw M t
kw Factor based on working conditions
kw k1 k2 k3 k4
Since, working conditions are not given, assume
k 1, k2, k 3, and k4 from data book
Refer PSG databook, Page No 7.90 and 7.91
k1 0.5 ; k2 1.25 ; k3 k 4 0.9
kw 0.5 1.25 0.43 0.9 3.08
[M t] 3.08 121.75 374.99 kgf cm
[M t] Design tw isting moment 375 kgf cm
Refer PSG data book, Page No. 7.89
P b 3 kg f/cm 2
and
k 1 spee d factor
Cams, Clutches and Brakes
5.59
P a k P b 3 1 3 kgf/cm 2
Face width of plate b r0 ri
75 60 15 mm 1.5 cm
Assume 0.3
imin
ri 0.8 r0
[M t ]
ro 75 mm (Given)
2 P b b r2m
and ri 60 mm
375
2 3 1.5 0.3 6.75 2 rm
0.97
r1 r0
2
75 60
67.5 mm
2
6.75 c m
Take imin 1
No. of plates m 1 m 2 i 1 1 1 2
Axial thrust W 2 C r0 ri
(Maximum pressure occurs at inner radius)
C pmax ri 3 6
18 kg/cm
W 2 18 7.5 6.0 169.64 kg
Axial thrust 169.64 kg
Problem 5.10: A single plate clutch, effective on both sides,
is required to transmit 30 kW at 1400 rpm. Determine the
inner and outer diameter of friction surface if the co-efficient
of friction is 0.25, ratio of diameter is 1.5 and the maximum
pressure is not to exceed 0.2 N/mm2. Also determine the axial
5.60
Design of Transmission Systems
thrust to be provided by springs. Assume the theory of uniform
wear.
Given data
Power 30 kW
P 30 kW 30 10 3 W
N 1400 rpm
Speed
0.25
pmax 0.2 N/mm2
Do
Di
1.5
Solution
Let ro & ri be the outer and inner radii respectively.
ro 1.5 ri
Now find
Torque to be transmitted (T)
T
60 30000
60 P
2 N 2 1400
204.62 N m
204.62 10 3 N mm
w.k.t
T n W rm
Here,
Cams, Clutches and Brakes
5.61
n
Number of sides of friction surface.
n2
(both sides of the plate being effective)
0.25
(given)
W
Axial thrust applied by the spring.
W 2 pmax ri ro ri
2 0.2 ri 1.5 ri ri
W 0.63 r2i N
Mean radius
rm
ri r o
rm
2
ri 1.5 ri
2
rm 1.25 ri
T n W rm
We have
204.62 10 3 2 0.25 0.63 r2i 1.25 ri
204.62 10 3 0.3937 r3i
204.62 10 3
ri
0.3937
1/3
ri [519735.839 ]1/3 80.400 mm
80 mm Di 160 mm
ri ~
5.62
Design of Transmission Systems
And
ro 1.5 ri 1.5 80
ro 120 mm D o 240 mm
The axial thrust applied by the spring W
W 0.63 r2i
0.63 802
W 4032 N
Problem 5.11 A multiplate clutch is to be designed to
transmit a power of 50 kW at 500 rpm. Assuming suitable
materials and data, determine the main dimensions of friction
lining used in that clutch.
Solution
Given data
Power P 50 kW ; Speed N 500 rpm
Assume service factor 1.25
Let
P d Design Power
Design power Rated power service factor
i.e.,
P d P Service factor
50 10 3 1.25
62500 W
Now calculate design torque that is to be transmitted.
T
60 P d
2N
60 62500
2 500
1193.66 N m
1193.66 10 3 N mm
Cams, Clutches and Brakes
5.63
Let,
Permissible shear stress for shaft material.
60 N/mm2 (Assume)
and
d
diameter of clutch shaft.
Then
16T
d
1/3
16 1933660
d
60
30938560
d
188.49
1/3
1/3
d [164134.15 ]1/3
d 54.75
d 55 mm
Let
ri Inner radius ; ro Outer radius
ri 2d 2 55
110 mm
ro 1.5 ri 1.5 110
165 mm
5.64
Design of Transmission Systems
n1 Number of driving plates 5 (Assume)
n2 Number of driven plates 6 (Assume)
W.k.t.
n n 1 n 2 1 5 6 1 10
Let the friction material be asbestos based material.
Assume, 0.35
Allowable pressure 0.21 to 0.56 N/mm 2
Now
T n Wrm
rm
W
ri ro
2
110 165
137.5 mm
2
T
1193660
n rm 10 0.35 137.5
W 2480.33 N
Now
pmax
W
2 r i r o r i
2480.33
2 110 165 110
0.06 N/mm 2 allowable pr. 0.21 N/mm 2
Since the pressure is less than allowable pressure,
our design is safe.
Cams, Clutches and Brakes
5.65
Now find face width
b ro ri 165 110
b 55 mm
Thickness
t 5 mm (Assumed)
Hence, the main dimensions of friction lining are
1. Inner radius 110 mm
2. Outer radius 165 mm
3. Face width
55 mm
4. Thickness
5 mm
Problem 5.12: A mult-disc clutch is to transmit 30 kW at
1200 rpm and consists of 4 discs on driving shaft and three
discs on the driven shaft. The inside diameter of the contact
surface is 150 mm. The maximum pressure between the friction
surfaces is limited to 0.2 N/mm2. The coefficient of friction is
0.25; Consider the uniform wear condition and find the outside
diameter of the contact surface.
P 30 kW ; N 1200 rpm
m 1 no. of discs on driving shaft 4
m 2 no. of discs on driven shaft 3
pmax 0.2 N/mm 2 ; 0.25 ; rmin
150
75 mm
2
Let rmax outside diameter
Refer PSG databook, Page No. 7.89
5.66
Design of Transmission Systems
Mt
97400 kW 97400 30
N
1200
2435 kg f cm
Tran smitted
M t 2435 kgfc m (or) M t 243500 N mm
torque
For uniform wear condition,
P max rmin C
C 0.2 75 15 N /mm
Axial force on each friction surface (W)
W 2C rmax rmin
W 2 15 rmax 75 94.24 rmax 75
(1)
But,
rm mean radius
rmax rmin
2
rmax 75
2
0.5 rmax 37.5
Number of friction surfaces i m 1 m2 1
i4316
Torque transmitted [M t] i W rm
243500 6 0.25 94.24 rmax 75 0.5 rmax 37.5
243500 6 0.25 94.24 0.5 r2max 2812.5
0.5 r2max 2812.5 1722.55
r2max 9070
Outside radius of disc rmax 95.23 mm
Cams, Clutches and Brakes
5.67
Problem 5.13: A multi disk clutch consists of five steel plates
and four bronze plates. The inner and outer diameters of
friction disks are 75 mm and 150 mm respectively. The
coefficient of friction is 0.1 and the intensity of pressure is
limited to 0.3 N/mm2. Assuming the uniform wear theory,
calculate
(i) the
required
operating
transmitting capacity at 750 rpm.
force,
(ii) power
(May/June 2007)
Solution
Given data
D o 150 mm, ro 75 mm, D i 75 mm, ri 37.5 mm , 0.1
pmax 0.3 N /mm2, N 750 rpm, m 1 5, m 2 4
Required operating force for uniform wear condition
pmax ri C
C 0.3 37.5 11.25 N/mm
Hence required operating force
W 2 C [ro ri]
2 11.25 75 37.5
2650.7 N
Power Transmitting Capacity at 750 rpm
For uniform wear condition
Normal Torque T i W rm
[i no. of frictional surfaces]
We know that
rm
ro ri
2
75 37.5
2
5.68
Design of Transmission Systems
and
No. of friction surfaces i m 1 m 2 1 5 4 1 8
75 37.5
T 0.1 2650.7
8
2
119.281 10 3 N mm
119.2 N m
Power
2 NT
60
2 750 119.2
60
9361.94 W
Power 9.36 kW
Problem 5.14: Find the torque that two surface of dry disc
clutch can transmit if the outside and inside lining diameter
are 120 mm and 70 mm respectively and the applied axial
force is 10 kN. Assume uniform wear and 0.4
(Apr/May - 2008 AU)
Solution
For uniform wear,
W 2 Pmax ri ro ri
Given that
W 10 kN, ri 35 mm ; ro 60 mm
pmax
W
2 ri ro ri
[P max ri C ]
Cams, Clutches and Brakes
5.69
10
2 35 60 35
1.8189 10 3 kN/mm2
pmax 1.8189 N/mm 2
For uniform wear condition
p ri C (constant)
Since the intensity of pressure is maximum at the
inner radius ri
and mean radius
rm
r o ri
2
60 35
47.5 mm
2
and Torque Transmitted
T n p W rm
[np i no.of frictional surfaces]
np 2 (since both sides of plate effective)
T 2 0.4 10,000 0.0475
380 Nm
5.2.9 CONE CLUTCH
Cone clutch is used in automobiles. It consists of
driver which is keyed to the driving shaft and has an inside
conical surface which fits exactly into the outside conical
surface which is keyed to the driven shaft. Hence it consists
of one pair of friction surface. The cone angle , the radii
of friction surface and the face width are the important
design parameters.
5.70
Design of Transmission Systems
b
C o nical F riction
Su rfa ce
Sp rin g
r1
B
r2
Wa
D riving
sha ft
D rive n
sha ft
D rive n
sha ft
D rive n
Fig.5.13 C one Clutch.
5.2.9.1 Design of cone clutch:
Consider a pair of friction surfaces of cone clutch.
Let
pn Normal pressure between the contact surfaces
r1 Outer radius of friction surface
r2 Inner radidus of friction surface
rm Mean radius of friction surface
r1 r 2
S em i cone angle
coefficient of friction between the
contact surfaces
Consider the following two conditions
1. Uniform pressure
2. Uniform wear
2
Cams, Clutches and Brakes
5.71
1. Uniform pressure
2 pn r31 r32
Frictional torque F t
3
sin
(1)
Frictio n
surfac e
b
F= W n
r
r2
r1
Wn
Wa
Fig. 5.1 4 Forces o n a F riction S urface
Let W a axial force; b face width; r mean radius
Normal face W n
W n Normal pressure Area of contact surface
pn 2r b
Axial force W a Wn sin
pn 2 rb sin
But, sin
r1 r2
b
r1 r2
r1 r2
(or) b
and r
2
sin
Substitute the values of b and r in equation (2)
r1 r2 r1 r2
sin
W a pn 2
2
sin
(2)
5.72
Design of Transmission Systems
W a pn r21 r22
pn
Wa
r21 r22
(3)
Now, substitute the value of pn in eq (1)
Ft
r3 r3
Wa
2
1
2
3
sin r2 r2
1
2
W a r31 r32
2
3
sin r2 r2
2
1
But
Wa
sin
Wn
r3 r3
2
2
1
Ft W n 2
2
3
r1 r2
2. Uniform wear
Incase of uniform wear, the intensity of pressure
varies inversely with the distance (similar to the axial
clutch)
Px
1
x
Px
C
x
Total frictional torque F t
(C a constant)
2
2
2 C r1 r2
2
sin
Normal force on the 2C
r1 r2
contact surface
sin
Axial force W a W n sin
2 C r1 r2
(4)
Cams, Clutches and Brakes
C
5.73
Wa
2 r1 r2
Substitute the value of C in eq. (4)
r2 r 2
Wa
2
1
2
Frictional torque F t
2
sin 2 r1 r2
but W n
W a r1 r2
2
sin
Wa
sin
r1 r2
Ft W n
2
Since, W n pn 2r b and
r r2
2
r
Therefore the above equation can be written as
Friction torque F t pn 2r b r
F t pn 2r2 b
Axial force required to engage the clutch
W a engage W n sin W n cos
Problem 5.15: An engine is developing 50 kW at 1200 rpm
by using a cone clutch. The cone angle is 30. The mean radius
is 300 mm; The coefficient of friction is 0.25; The normal
pressure should not exceed 0.2 N/mm2; Determine (1) face width
of the cone (2) axial force required to engage the clutch.
5.74
Design of Transmission Systems
P 50 kW ; N 1200 rpm ; 2 30; 15
pn 0.2 N/mm 2 ; 0.25 ; r 300 mm Let; b face width
Assume uniform wear, Refer PSG data book Page.No. 7.89
M t T ran smitted torque
(o r)
9400 kW
N
97400 50
4058.33 kg f c m
1200
M t 405833 N mm
Frictional torque F t 2 pn b r2
405833 2 0.25 0.2 b 300 2
F ace width b 14.35 mm
Let Waengage Axial force required to engage the
clutch
W n Normal force on the contact surface
pn 2r b
0.2 2 300 14.35
5409.82 N
Axial force required
Waengage W n sin cos
to engage the clutch
5409.82 sin 15 0.25 cos 15]
F aengage 2707.17 N
Problem 5.16: A power of 20 kW, is to be transmitted through
a cone clutch at 500 rpm. For uniform wear condition find the
main dimensions of clutch and shaft. Also determine the axial
Cams, Clutches and Brakes
5.75
force required to engage the clutch. Assume co-efficient of
friction as 0.25 and the maximum normal pressure on the
friction surface is not to exceed 0.08 MPa and design stress
for the shaft material as 40 MPa.
Solution
Given data
P 20000 Watts ; N 500 rp m ; 0.25
[pmax] 0.08 MPa 0.08 MN /m 2
0.08 N/mm 2
s 40 MPa 40 MN/m 2
40 N/mm 2
Torque to be transmitted
T
60 P 60 20000
2 N 2 500
382 N m
382 10 3 N mm
Diameter of clutch shaft
16T
d
s
1/3
16 382 10 3
d
40
d 36.5 mm
Take d 40 mm
1/3
5.76
Design of Transmission Systems
Let
rm Mean radius
rm 4d assumed
rm 4 40 160 mm
Now
b face width of friction lining
b
160
80 mm
2
Assume (angle of friction surface with axis clutch)
20
ro Outer radius of friction lining
ro rm
b
sin
2
160 40 sin 20
174 mm
ri Inner radius of friction lining.
ri r m
b
sin
2
160 40 sin 20
146 mm
Cams, Clutches and Brakes
T
pmax
5.77
pmax ri r2o r2i
sin
T sin
ri r2o r2i
382 10 3 sin 20
0.25 146 174 2 1462
0.1271 N/mm 2 allow able 0.08 N/mm 2 pr
Since the pressure developed is more than the
allowable pressure, therefore the design is not safe with
this dimension. So let us change the dimension.
rm 5d 200 mm
b 100 mm
25
then
ro 200 50 sin 25
221 mm
ri 200 50 sin 25
179 mm
pmax
382 10 3 sin 25
0.25 179 221 2 179 2
0.068 N/mm 2 [pmax] 0.08 N/mm 2
Now the pressure developed is less than the allowable
pressure i.e. (0.08 N/mm 2)
The design is satisfactory.
5.78
Design of Transmission Systems
Axial force required to engage the clutch W a
T W n rm
Wa
W a rm
sin
T sin
rm
382 10 3 sin 25
0.25 200
3229 N
5.2.10 CENTRIFUGAL CLUTCHES
The disc clutches and cone clutches are manually
operated mechanical clutches whereas the centrifugal
clutches are operated by an electric motor (or) I.C engine.
These clutches are employed to engage the driven shaft
automatically after the driving member attains a particular
Fig.5.15
Cams, Clutches and Brakes
5.79
speed. The centrifugal clutch permits the driver motor or
engine to start, warm up and accelerate the operating speed
without load. The clutch then automatically engages and
the driven shaft is smoothly brought up to operating speed.
This type of clutches are generally used in Motor
cycles, Go-cart, Mopeds, Scooty, etc.
5.2.10.1 Designing of centrifugal clutch
Torque transmitted
T Ff R n
where
Ff
Frictional force
R
Inside radius of drum
n
No of shoes
Coefficient of friction
Fa
Actuating
force)
force
(outward
Fc
Centrifugal
shoe
force
on
Fs
Inward force (Spring force)
F c 2
r
Distance of centre of gravity
F c m 2r
Angular speed of drum at
running speed.
F s m 21 r
1
Angular speed of drum at the
time of engagement
F f Fa
Now
Fa Fc Fs
each
5.80
Design of Transmission Systems
T Ff R n Fa R n
Also the force acting on each shoe Net outward
force F a
Here, the intensity pressure exerted on each shoe due
to this force.
p
Fa
Net outward force
Area of conta ct of shoe lb
Fa
Rb
. .
. lR
5.2.10.2 Internal expanding rim clutches
The internal expanding rim clutch is often used in
textile machinery, machine tools where the clutch may be
located within the driving pully. It benefits from centrifugal
effects and transmits high torque even at low speeds and
requires both positive engagement and high release force.
It is a type of centrifugal clutch.
5.2.11 Electromagnetic clutch
Electromagnetic clutches are operated electrically but
transmission of torque is done mechanically. This is why
it is also called as electro-mechanical clutches.
Electromagnetic clutch is best suited for remote
operations, because it doesnot require linkages to control
its engagement. It has fast and smooth operation. However
there is a risk of overheating, because energy dissipates as
heat in the electromagnetic actuator each time when the
Cams, Clutches and Brakes
5.81
clutch is engaged. Therefore the maximum operating
temperature of the clutch is limited by the temperature
rating of the insulation of the electromagnet, Another
drawback is its high initial cost.
Arm ature
Field C oil
H ub
Fig. 5.16 Electro M agnetic Clutch .
Working:
Engagement: When the clutch is required to actuate,
current flows through the electromagnet, which produces a
magnetic field. The monitor portion of the clutch becomes
magnetized and set up a magnetic loop that attracts the
armature. The armature is pulled against the rotor and a
frictional force is generated at contact within a relatively
short time, the load is accelerated to match the speed of
the motor, there by engaging the armature and output hub
5.82
Design of Transmission Systems
of the clutch. In the meanwhile the motor is constantly
rotating with the input all the time.
Disengagement: When current is removed from the shaft,
the armature is free to turn with the shaft. In most
designs, spring holds the armature away from the motor
surface when power is released creating a small air gap.
Cycling: It is achieved by interrupting the current
through the electromagnet. Slippage normally occurs only
during acceleration. When the clutch is fully engaged, there
is no relative slip.
Applications
Electromagnetic clutches are widely used because of
its compact nature; Some of the areas of applications are.
1. Machinery like lawnmover,
conveyor drive etc.
copy
machines,
2. Automobile: Helps the driver to shift gear, while
the vechile is in motion or running engine.
3. Locomotives: It is used in diesel locomotives.
Cams, Clutches and Brakes
5.83
5.3 BRAKES
5.3.1 Introduction:
Brake is a device which is used to stop the motion
of a machine or retard its motion. It is due to the friction
between contact surfaces.
The factors required in the design are:
1. Coefficient
surfaces.
of
friction
between
the
braking
2. Unit pressure between braking surfaces.
3. The projected area of the braking surfaces.
4. Heat dissipating capacity.
5.3.2 Difference between clutch and brake
Clutch is used to rotate the driven member along with
driving member. Where as, brake is used to control or stop
the moving member. In otherwords, clutch is used to
connect two moving members of the machine, i.e driven
member along with driving members. Whereas brake
connects a moving member to a stationary member.
Therefore we can say that, if one member of the clutch is
kept fixed (stationary), then the clutch becomes a brake.
5.3.3 Brake friction materials
The brake lining material should have the following
properties.
1. It should have high coefficient of friction.
2. It should have high wear and heat resistance.
3. It should have high heat dissipation.
4. It should not react with moisture and oil.
5.84
Design of Transmission Systems
5.3.4 Types of Brakes
1. Simple block shoe brake
2. Pivoted block shoe brake
3. Double block shoe brake
4. Simple band brake
5. Differential band brake
6. Band and block brake
7. Internal expanding brake
5.3.5 Single Block Shoe Brake
It consists of a block which is pressed against the
rotating wheel. The friction between the block and wheel,
it causes a tangential braking force on the wheel. This
tangential braking force retards or stops the rotation of the
wheel. The block is attached to a lever, which is pivoted
at one end and the force is applied on the other end.
Let , P
Applied force
RN
Normal Reaction force
r
Wheel radius
2
Angle of contact between block and wheel
Coefficient of friction
Ft
Tangential braking force (or) frictional force
l
Length of the lever;
x distance between centre of wheel to the
fulcrum.
It is assumed that, the normal pressure is uniform
between the block and the wheel when the angle of contact
2 60
Then, frictional braking force F t R N
Cams, Clutches and Brakes
5.85
. .
Braking torque = T B F tr R Nr [ . F t R N]
There are three conditions in the arrangement of
contact surface and position of pivot.
Note: Direction of rotation is equal to direction of F t break.
Case I
When the tangential braking force F t passes through
the fulcrum of the lever
N
N
x
x
Ft
O
Fulcru m
P
RN r
O Ft
Fulcru m
2
P
RN
2
(a) Clock - wise Ro tation
r
(b) Anti Clo ck - wise Rotation
Fig.5.17
(a) Clockwise rotation of
wheel. Taking moments
about ‘O’
(b) Anticlockwise rotation
of wheel. Taking moments
about ‘O’
RN x P l
RN x P l
Note:
RN
Pl
x
RN
Pl
x
In clockwise rotation of wheel, F t is acting right side.
Because, we design the brake shoe, not rotating wheel.
Hence, with respect to brake shoe, F t should be right side.
Similarly, in case of anticlockwise rotation of wheel, F t
should be left side.
Design of Transmission Systems
5.86
But, braking torque
T B RN r
Braking torque
TB RN r
Pl
r
x
TB
Plr
x
TB
Pl
r
x
Plr
x
Case II
When the tangential force F t passes through a
distance ‘a’ below the fulcrum.
x
a
x
O
P
RN
2
a
Ft
O
P
Ft
r
RN
2
(a) Clock - w ise Ro tation
r
(b) Anti Clock - wise Rotatio n
Fig.5.18
(a) When wheel rotates (b) When wheel rotates in
in clockwise direction.
anti-clockwise direction
Taking moment about ‘O’
Taking moment about ‘O’
F t a R N x Pl
Ft a P l R N x
But F t RN
But F t RN
RN a R Nx Pl
RN a Pl RN x
Pl
a x
R N x RN a Pl
RN
Cams, Clutches and Brakes
Braking torque
R N x a Pl
TB R N r
TB
5.87
Plr
a x
RN
Pl
x a
TB
Plr
x a
Case III
When the tangential force F t passes through a
distance ‘a’ above the fulcrum.
x
x
Ft
Ft
a
O
P
O
2 R N r
(a) Clock - w ise Ro tation
a
2 R N
r
P
(b) Anti Clock - wise Rotatio n
Fig.5.19
(a) When wheel rotates in (b) When wheel rotates in
clockwise direction
anti-clockwise direction.
Taking moment about ‘O’
Taking moment about ‘O’
F t a P l RN x
F t a R N x Pl
But F t RN
But F t RN
RN a Pl RN x
RN a R Nx Pl
R N x R N a Pl
RN
Pl
a x
5.88
Design of Transmission Systems
R N x a Pl
RN
Pl
x a
TB
Plr
x a
Braking torque
TB R N r
TB
Plr
a x
Case II (b) and Case III (a) are same
i.e., RN x
Pl
R N a
moment of frictional force
In this type of brakes, frictional force adds to the
moment of force (Pl) i.e. friction helps to apply the force.
These brakes are self-energizing brakes.
Case II (a), and case III (b) are same
When the frictional force is greater enough to apply
the brake without any external force, then the brake is
called self-locking brake.
From the above equations, condition for self locking
if x a ; the P will be –ve or equal to zero.
No external force is required to apply the brake.
The self locking brake is used only in back - stop
applications.
In order to avoid self locking,
x a
The brake should be self energizing but not self
locking
Cams, Clutches and Brakes
5.89
P b bearing pressure on the block or shoe
RN
Ab
A b width of shoe projecting length of shoe
w 2rsin
Angle of contact
It is assumed that the normal reaction and frictional
force act at the mid point of the block; Usually the angle
of contact 2 is small i.e less than 60. When the value
of
2
is
more
than
60 2 60,
then
equivalent
co-efficient of friction w is used in torque equation.
Equivalent co-efficient of friction
eq
4 sin
2 sin 2
actual coefficient of friction
where
2 Angle of conta ct
Problem 5.17: A single block brake shown in the diagram
has the diameter 300 mm. The angle of contact is 120. The
coefficient of friction is 0.3; If the torque transmitted by the
brake is 80 N – m, find the force P required. Assume length
of the lever l 300 mm and distance between centre of wheel
to fulcrum x 150 mm
Given:
2 120;
x 150 mm
5.90
Design of Transmission Systems
T B 80 N m
x
80 10 3 N mm
Diameter
of
drum
d 300 mm (or) radius of
Ft
O
Fu lcru m
P
RN
2
drum 150mm
Let
Force
P
required to operate the
brake
(a ) Clo ck - W ise R otatio n
Taking moments about O
RN x P l
RN
Pl P 300
2P
x
150
RN 2 P
Since angle of contact is greater than (or) equal to
60
4 sin
2 sin 2
4 0.3 sin 60
120 sin 120
4 0.3 sin 60
sin 120
1.5
1.03923
2.96042
0.351
Cams, Clutches and Brakes
5.91
Braking torque TB R Nr
80 10 3 0.351 [2 P] 150
P
80 103
759.7 N
105.3
Problem 5.18: The block brake is shown in the diagram;
Brake drum diameter provides a braking torque of 360 Nm,
and coefficient of friction is 0.3
Find (1) the force P to be applied at the end of the lever for
the clockwise and counter clockwise rotation of the brake drum.
2. The location of the pivot or fulcrum to make the self locking
for the clockwise direction.
2 00
6 00
P
50
O
1 00
Solution
1. (a) Consider clockwise direction
TB 360 N m
360 10 3 Nmm
r
300
150 mm
2
Let P is the force applied at the end of the lever
5.92
Design of Transmission Systems
6 00
2 00
Ft
50
O
RN
1 00
Fig.5.3.4.
Braking torque TB Ft r
360 10 3 F t 150
F t 2400 N.
But
F t R N
2400 0.3 R N
R N 8000 N
Taking moments about ‘O’
P 800 R N 200 Ft 50
P
8000 200 2400 50
800
P 1850 N
(b) Consider counter clockwise direction
Taking moments about ‘O’
P 800 F t 50 RN 200
P 2150 N
P
Cams, Clutches and Brakes
200
5.93
600
P
Ft
50
100
O
RN
2. Location of pivot or fulcrum to make self-locking
(when anti clockwise rotation). Let x be the distance of the
pivot from the line of action.
Taking moments about ‘O’
P 600 200 F t x R N 200
In order to make the brake self-locking F t x must be
equal to RN 200 (i.e. P must be zero)
Ft
x
100
O
RN
F t x RN 200
P
5.94
Design of Transmission Systems
x
8000 200
2400
F t 2400 N
R N 8000 N
667 mm
Problem 5.19: In a single block brake, the diameter of the
drum is 250 mm and the angle of contact is 90. The operating
force of 700 N is applied at the end of lever which is at 250
mm from the centre of the brake block. The coefficient of
friction between the drum and the lining is 0.35. Determine
the torque that may be transmitted. Fulcrum is at 200 mm
from the centre of brake block with an offset of 50 mm from
the surface of contact.
(a) Consider clockwise direction
Taking moments at ‘O’
P 450 F t 50 RN 200
But P 700 N
700 450 F t 50 R N 200
3,15,000 50 F t R N 200
2 00 m m
2 50 m m
P
7 00 N
50 mm
O
Fig.5.3.13.
Cams, Clutches and Brakes
200 m m
5.95
250 m m
Ft
50
P
700 m m
RN
But F t RN
we know
0.35
F t 0.35 R N
Substituting in above equation
3,15,000 50 0.35 R N 200 R N
R N 1726 N
F t 604.109 N
But Braking Torque T B F t r
604.109
250
75513 Nmm
2
75.513 Nm
(b) Anticlockwise direction
Taking moments about ‘O’
P 450 F t 50 RN 200
3,15,000 0.35 R N 50 RN 200
5.96
Design of Transmission Systems
250 m m
200 m m
Ft
50
P= 70 0N
RN
R N 1448.27 N
F t 506.89 N
But Braking Torque TB F t r 506.89
250
63.36 Nm
2
5.3.6 Simple band brake
a
a
F
O
T2
A
L
A
T1
L
T1
O
B
B ra ke d ru m
B
T2
B ra ke d ru m
S h aft
B a nd
F
S h aft
B a nd
Fig.5.2 0(a) C lockw is e D irectio n
In a simple band brake, one end of the band is
attached to the fixed pin or fulcrum O of the lever and the
Cams, Clutches and Brakes
5.97
other end is attached to the lever at a distance ‘a’ from
the fulcrum.
Let
F
Force applied at the end of the lever
T1
Tension on tight side of the band
T2
Tension on the slack side of the band
Angle of lap
Coefficient of friction
r
Brake drum radius
Ratio of tensions
T1
T2
e
Braking force on the drum T 1 T 2
Braking torque on the drum TB T 1 T 2 r
(Neglecting thickness of band)
Let
t
thickness of the band
then
re
effective radius of the drum
t
r
2
Braking torque on the drum TB T1 T2 re
(Considering thickness of band)
Consider clockwise rotation, taking moments about
fulcrum ‘O’
5.98
Design of Transmission Systems
F l T1 a
Then,
F
T1 a
l
Consider anti-clockwise rotation, taking moments
about fulcrum ‘O’
Then,
F l T2 a
T2 a
F
l
where a perpendicular distance from O to the line of
action
l length of the lever
Note 1
Let
P
Power absorbed in watts.
N
Speed of the drum in rpm
TB
Braking torque in N m
P
2 NT B
60
T B Braking torque
P 60
2 N
Note 2
To find width of steel band
Let
b
width of the band – mm
t
thickness of band – mm
tensile
t
N/mm
stress
Cams, Clutches and Brakes
5.99
in
in
the
band
material
2
maximum tension in Newtons
T1
Then, T 1 t b t Newtons
(a) If stress and thickness are given, find b
(b) If cross-section of band t are given, find stress.
5.3.7 Differential Band brake
A
a
T2
b
O
A
O
B
F
C
T2
L
M
b
a
C T1
B
T1
L
F
M
Ba nd
Bra ke drum
Sh aft
(a) Clockwise R otation
of the Drum
Ba nd
Bra ke drum
Sh aft
(b) Anti Clo ckwise Ro tation
of the Drum
Fig.5.21 Differential Ban d Brake
In case of differential band brake, the ends of the
band are attached at A and B to a lever AOC as shown
in the diagram. The lever is pivoted on a fixed pin or
fulcrum at ‘O’.
Let
T1 Tension on tight side
T2 Tension on slackside
5.100
Design of Transmission Systems
F Applied force
l length of lever (from O to C)
a distance from fulcrum to other end (O to A)
b distance from O to B (from O to B)
Consider clockwise rotation, taking moments about ‘O’
F l T1 b T 2 a
Fl T 2a T 1b
... (1)
For anti-clockwise rotation,
F l T2 b T 1a
F l T1a T2b
... (2)
When the frictional force helps to apply the brake it
is called self energizing brake.
In
the
above
two
equations
the
moment
T 1b and T2 b helps in applying brake.
Note 1
When the force F is negative or zero, then the
brake is self locking
Therefore, for clockwise rotation of the drum, the
condition for self-locking is,
T 2 a T 1 b or T 1 b T2 a
(or)
Cams, Clutches and Brakes
T2
T1
5.101
b
a
For anti- clockwise rotation of the drum, the condition
for self locking is,
T1 a T2 b or T2 b T 1 a
(or)
T1
T2
b
a
Note 2
If length of OB is greater than OA, then the force
F must act in the upward direction to apply brake.
Note 3
If the length OB is less than OA, then force F
must act in the downward direction in order to
apply brake. T 1 and T2 remain same.
Problem 5.20: A differential band brake shown in the
diagram has a width of 80 mm and thickness of 2 mm. The
permissible tensile stress in the band material is limited to 60
N/mm2. The Coefficient of
friction is 0.25 between drum
and the friction lining. The
brake
drum
diameter
is
a
50
for
F
b
2 00
O
T2
500 mm.
Calculate
A
B
C
T1
clockwise
direction
(a) Tension in the band
2 20
o
B ra ke d rum
(b) Actuating force
B and
(c) Braking torque
(d) Whether
the
self-locking or not.
brake
is
Fig.
5.102
Design of Transmission Systems
Given data:
b 80 mm ; t 2 mm ; t 60 N/mm 2
d 500 mm (or)
A
r 250 mm
T2
F
a
50
T2
b
O
2 00
C
B
T1
8 00
Since b a therefore F will act upwards
Max tension T 1 b t 60 80 2 9600 N
T1
T2
e
9600
e0.25 3.839
T2
220
3.839 radian
T2 3676 N
Taking moments about ‘O’
F 800 T 1 200 T 2 50
F
9600 200 3676 50
800
2629.75 N
Braking torque T B T 1 T 2 r
9600 3676 250
1481000 N m m
1481 N m
180
Cams, Clutches and Brakes
5.103
Checking for self locking
Clockwise rotation
Since, b a, the c o nditio n fo r self lo c king
T2
T1
T2
T1
b
a
3676
0.3829
9600
b 200
4
a
50
Since
T2
T1
b
a
0.3829 4
The brake is self-locking
Problem 5.21: Design a differential band brake for a crane
lifting a load of 50 kN through a rope wound round a barrel
of 550 mm diameter, as shown in Fig. The brake drum keyed
to the same shaft be 650 mm in diameter and the angle of lap
of the brake band over the drum is 240. Operating arms of
the brake are 45 mm and 210 mm. Operating lever is 1.5 m
long. Take
0.25.
Solution:
Given data
Load 50 kN 50 10 3 N
Barrel Diameter 550 mm
5.104
Design of Transmission Systems
2 40
o
6 50
mm
5 50 m m
T1
L oa d
2 10
T2
F
O
45
Fig.
1 50 0
Barrel radius 225 mm
Brake drum diameter 650 mm
Brake drum radius 325 mm
Angle of lap 240
240
rad
180
4.188 rad
Length of lever 1.5 m
0.25
Designing differential band brake by following steps.
Step 1
Find braking torque
T B Load Barrel radius
T B 50 10 3 N 225 mm
T B 11250 10 3 Nmm
T B 11250 N.m
Cams, Clutches and Brakes
5.105
Step 2
Find Tension T1 & T 2
Tension ratio
T1
T2
T1
T2
e
T 1 Tight side tension
T Slack side tension
2
e0.25 4.188 2.849
o r T1 2.849 T2
...(1)
Now,
TB T1 T2 r
11250 N m T1 T2 0.325 m
T 1 T 2 34,615.4 N
...(2)
Comparing and solving both equation 1 and 2, we get
T 1 53336.5 N and
T 2 18721.14 N
Step 3
Thickness of band brake
t 0.005 D
0.005 650
t 3.25 mm
Now find band width w
Assume Induced tensile stress t 60 N/mm2
5.106
Design of Transmission Systems
t
T1
wt
53,336.5
60 N/mm 2
w 3.25
Band Width w 273.5 mm
w 273.5 mm
Step 4
Calculate the bearing pressure
P max
T1
w .r
53,336.5
273.5 325
P m ax 0.599 N/mm 2
[P ] for Metal drum 1.5 N/mm 2
Since P max [P],
The design is satisfactory.
Step 5
Force applied at the end of lever.
From the figure.
Taking moments about O, we get
F 1500 T1 45 T2 210
F 1500 53336.5 45 18721.14 210
F 1020.85 N
Cams, Clutches and Brakes
5.107
Problem 5.22: A differential band brake is operated by lever
as shown in fig. The brake drum has a diameter of 600 mm
and the maximum torque on the drum is 900 N-m. If the
co-efficient of friction between the brake lining and drum is
0.3, find the operating force.
Solution:
Given data
Diameter 600 mm or
Radius
300 mm 0.3 m
T B 900 N m
0.3
10
0
m
a
m
D
5 00 m m
F
B
O
T1
b
8 0m m
2 40
C
T2
o
Fig.
5.108
Design of Transmission Systems
OB l 500 mm 0.5 m
OC b 80 mm 80 10 3m
OD a 100 mm 0.1 m
240 240
180
4.188 rad
Step 1
Braking torque is given 900 N m
Step 2
Tension of tight and slack side.
Tension ratio is given by
T1
T2
T1
T2
e
e0.3 4.188 3.5136
T1 3.5136 T2
...(1)
Also
TB T1 T2 r
900 N m T1 T2 0.3 m
T1 T2 3000
...(2)
Comparing and solving equation (1) and (2) we get
T 1 4193.48 N
T 2 1193.50 N
Cams, Clutches and Brakes
5.109
Step 3
Taking moments about the fulcrum O, we get
F 0.500 T1 0.100 T 2 80 10 3
F 0.5 4193.48 0.1 1193.50 80 10 3
F 0.5 323.868
Operating force F 647.736 N
Problem 5.23: A band and block brake having 12 blocks, each
of which subtends at an angle of 16 at the centre, is applied to
a rotating drum of diameter 600 mm. The blocks are 75 mm
thick. The drum and the flywheel. mounted on the same shaft
have a mass of 1800 kg and have a combined radius of gyration
of 600 mm. The two ends of the band are attached to pins on
the opposite sides of the brake fulcrum at distances of 40 mm
and 150 mm from the fulcrum. If a force of 250 N is applied at
a distance of 900 mm from the fulcrum, find:
(i) The maximum braking torque,
(ii) The angular retardation of the drum, and
(iii) The time taken by the system to be stationary from the
rated speed of 300 r.p.m. Take coefficient of friction between
the blocks and the drum as 0.3.
Solution
Given data
Angle of contact 2 16
8
d 600 mm 0.6 m
or
r 300 mm 0.3 m
5.110
Design of Transmission Systems
D
N
900 m m
40
T1
a
mm
A
O
B
b
150 m m
T2
F = 2 50 N
r
D rum
Fig.
t 75 mm 0.075 m
Mass
m 1800 kg
Radius of gyration k 600 mm 0.6 m
Force F 250 N
(a) Number of blocks n 12
From the figure
OD a 40 mm 0.04 m
OA b 150 mm 0.15 m
OB l 900 mm 0.9 m
Step 1 Calculate Maximum braking torque T B
The braking torque will be maximum when all the
following conditions are satisfied.
Cams, Clutches and Brakes
5.111
1. b > a.
2. The applied force acts upwards.
3. Anticlockwise rotation of brake drum.
From the fig we know that band attached to A is
tighter T 1 and end of band attached to B is slack side
tension T2.
Tension ratio is given by
T1
1 tan
T2 1 tan
n
T1
1 0.3 tan 8
T2 1 03 tan 8
T1
T2
12
2.7524
T1 2.752 T2
...(1)
Now taking moments about O.
F l T 1 a T2 b
250 0.9 T1 0.04 T2 0.15
225 0.04 T1 0.15 T 2
...(2)
Comparing and solving equation (1) and (2) we get
T1 5636 N and
T2 2048 N
5.112
Design of Transmission Systems
Now
Maximum braking torque TB
d 2t
T B T 1 T 2
2
0.6 2 0.075
5636 2048
2
1345.5 N m
II. Find Angular retardation of drum
T B I mk 2
1345.5 1800 0.62
2.07 rad/s2
III. Time taken by the system to come to rest from the
speed of 300 rpm.
Initial angular speed
i
2N
60
2 300
31.4 rad/s
60
Final angular speed f 0 rad/s
Now
w.k.t
f i t
0 31.4 2.07 t
t
31.4
2.07
t 15.2 sec
Cams, Clutches and Brakes
5.113
5.3.8 Double shoe brake
In case of single block shoe brake, an additional load
is acting on the shaft and its bearings. In order to overcome
this additional load, double block shoe brake is used.
Note
When angle of contact is more than 60, then the
equivalent coefficient of friction
4 sin
2 sin 2
TB Ft Ft r
t
1
2
where F t and F t
1
2
are braking forces on two blocks and
r radius of the wheel
Problem 5.24: A double shoe brake shown in the diagram,
is capable of absorbing a torque of 1500 N-m. Brake drum dia
= 400 mm; Angle of contact for each shoe 110; 0.4
Find:
(a) Spring force necessary to set the brake
(b) Width of the shoe brake, if the bearing pressure on the
lining material is not to exceed 0.5 N/mm2
Solution
Given data
TB 1500 10 3 N mm
d 400 mm;
r 200 mm;
2 110 110
1.919 rad
180
5.114
Design of Transmission Systems
S
Ft
S
3 00
2
110
RN
o
110
o
R N1
2
2 50
Ft
O2
O1
40
40
Fig.
0.4 ; P b 0.5 N/mm 2
Let S Spring force necessary to set the brake.
Since 2 60 ;
Therefore
4 sin
equivalent coefficient
of friction 2 sin 2
4 0.4 sin 55
1.919 sin 110
0.4584
Cams, Clutches and Brakes
Taking moments about O 1
S 550 R N 250 F t 200 40
1
RN
But
1
Ft
1
1
S 550 545.37 F t 160
1
705.37 F t
1
F t 0.78 S Newtons
1
Similarly, S 550 F t 200 40 RN 250
2
2
S 550 160 F t
2
550 S 385.37 F t
Ft
2
0.4584
250 545.37 F t
2
2
F t 1.4272 S Newtons
2
Braking torque T B F t F t r
1
2
1500 10 3 [0.78 S 1.4272 S] 200
S 3398 Newtons
F t 0.78 S 0.78 3398 2650.4 N
1
and F t 1.4272 S 1.4272 3398 4849.6 N
2
To find width of shoe brake:
Let
b width of the brake shoe.
5.115
5.116
Design of Transmission Systems
RN
1
RN
2
Ft
1
Ft
2
2650.4
5782 N
0.4584
10579.4 N
Projected bearing area of one shoe
Ab b 2rsin
Pressure
0.5
b
RN
Ab
10579.4
b 2r sin
R N RN
2
1
11515
0.5 2 200 sin 55
b 64.6 mm
Max. normal force is on the left hand side of the shoe
Problem 5.25: The layout of double block brake is shown in
Fig. The brake is rated at 250 N-m at 650 rpm. The drum
diameter is 250 mm. Assuming coefficient of friction to be 0.3
and for conditions of service. A pressure value of 1000 kPa
may be assumed.
Determine
(i) Spring force ‘S’ required to set the brake
(ii) Width of shoes
Which shoe will have greater wear and what will be the ratio
of rates of wear of the two shoes.
Solution
1. Relation between friction and Normal forces
Cams, Clutches and Brakes
S
S
FL2
110
RN
1 60 m m
o
RN
110
2
1
o
F L1
O1
O2
60
60
RN
But e
Fig.
Ft
e
4 sin
2 sin 2
since 0.3, 2 110
1.919
180
110
4 0.3 sin
2 0.3437
e
1.919 sin 110
RN
1
Ft
1
0.3437
1 60 m m
5.117
5.118
Design of Transmission Systems
R N 2.91 F t
1
1
Similarly RN 2.91 F t
2
2
2. Calculation of spring force
Considering LH yoke, take moment about O 1,
S 320 F t 125 60 R N 160 2.91 Ft 160
2
2
2
(ie)
320S 65 F t 465.5 F t
2
2
320S 400.5 F t
2
Ft 0.799 S
2
Considering RH yoke, take moment O2
S 320 F t 125 60 RN 160
1
2
320 S 65 F t 2.91 F t 160
1
1
320 S 473 F r
F t 0.6 S
1
Now Braking Torque F t F t r 250 10 3 Nmm (given)
1
2
0.6 S 0.799 S 125 250 10 3
S 1426.4 N
3. Wear depends upon the friction force
Wear ratio is
Ft
2
Ft
1
Fl
Fr
Cams, Clutches and Brakes
Ft
2
Ft
1
5.119
Fl
0.799 S
1.33
0.6 S
Fr
As F l F r, LH side shoe will have greater wear
Determination of width of shoe
Determine the greater normal force and obtain
bearing pressure in terms of the unknown width of the
shoes; by knowing pressure value, b can be found out
R N R nl 2.91 F l 2.91 0.799 S 2.91 0.799 1426.4
2
3316.5 N
R N R nr 2.91 F r
1
2.91 0.6 S
2.91 0.6 1426.4 2490.5 N
We find Rnl R nr , and hence R nl will be used in
calculating the maximum bearing pressure.
Projected area of shoe
A 2r sin b
2 125 sin 55 b
204.78 b mm 2
P Unit bearing pressure
R nl
A
3316.5
204.78 b
16.19
N /mm 2
b
16.19
10 6 N/m2
b
5.120
Design of Transmission Systems
V rubbing velocity
Dn 250 10 3 650
60
60
8.508 m/s
Pressure 1000 kPa given
16.19
10 6 8.508 1000000
b
b 137.74 mm
5.3.8 Internal Expanding Brake
Internal expanding brake is commonly used in
automobiles. It consists of two brake shoes S 1 and S2 and
outer surfaces are lined with friction material. These shoes
are pivoted at one end about O 1 and O2. The other end of
the shoes are made to contact a cam. When the cam
rotates, the brake shoes are pushed outwards. The friction
between the brake shoes and drum produces the braking
torque, which reduces the speed of the drum. The brake
shoes are held in their original position by means of a
spring.
When the drum rotates in the anti-clockwise
direction, lefthand shoe is known as leading or primary
shoe and the right hand shoe is known as trailing or
secondary shoe.
Refer PSG data book page No 7.99
Let
r Internal radius of the brake drum
b Face width of the shoe
Cams, Clutches and Brakes
5.121
R o tation
F
F
r
D ru m
L in ing
c
a
O1
O2
Fig. 5.22
a Distance from the centre of the drum to the shoe pivot
F Actuating force
p pressure at angle ‘’
1 centre angle of heel from pivot
2 centre angle of toe from pivot
m centre angle of point of maximum pressure from pivot.
M n moment of normal force on the right shoe.
M n moment of normal force on the left shoe.
M f moment of the frictional force on the left shoe
pm maximum pressure on the right shoe
pm maximum pressure on the left shoe
coefficient of friction
J polar moment of inertia of the brake drum Kg m.sec 2
t
Design of Transmission Systems
5.122
tr temperature rise of the brake drum
C p sp. heat of drum material
0.13 for cast iro n
0.116 fo r steel
Total moment of frictional force
Mf
2
pm b r
sin r a cos d
sin m
1
pm b r
a
r cos 1 cos 2 cos 22 cos 21
4
sin m
Total moment of normal force
Mn
pm b r
sin m
2
sin 2 d
1
1 pm b r a
1
1 sin 2 sin 22
2
2 sin m 2
For right shoe,
F
Mn Mf
C
For left shoe
F
M n M f
M n
C
M npm
pm
and Mf
M f pm
pm
Cams, Clutches and Brakes
5.123
Braking torque
cos 1 cos 2
M t b r2
pm pm
sin m
Note 1
max 90 when 2 90
max 2 when 2 90
Note 2
If M f M n, then the brake becomes self locking.
Problem 5.26: An automotive type internal – expanding shoe
is shown in the diagram. The face width of the friction lining
is 60 mm and the coefficient of friction is 0.35. The maximum
intensity of pressure is limited to 1.2 N/mm2. Assume angle
1 can be zero. Calculate (1) the actuating force ‘F’ and (2)
The torque capacity of the brake.
30
30
o
F
1 20
o
o
F
1 50
R
1 20
1 77
o
1 25 R
30
o
30
o
Fig.
5.124
Design of Transmission Systems
Solution
Assume that the maximum normal pressure will occur
between the lining on right hand shoe and the brake drum.
Therefore, for right hand shoe
Since,
1 0;
max 90 when 90
2 120
max 2É when 2 90
2 is greater than 90
m max 90
From the given diagram
a 125 mm
C 177 mm
r 150 mm
Given data
b 60 mm
0.35
p 1.2 N/mm 2
Total moment of frictional force
Mf
pm b r
a
r cos 1 c o s 2 4 cos 22 cos 21
sin m
0.35 1.2 60 150
150 cos 0 cos 120
sin 90
125
cos 2120 cos 20
4
Cams, Clutches and Brakes
5.125
3780 150 1 0.5 31.25 0.5 1
3780 225 46.875 673312.5 N mm
Total moment of normal force
Mn
pm b r
1
2 1 sin 21 sin 22
2 sin m
2
1.2 60 150 125
2 sin 90
1
120 180 2 sin 20 sin 2 120
675000 2.09
1
[0 0.866 ]
2
1706000 N mm
F
Mn Mf
C
1706000 673312.5
177
5834.39 N
Torque on the right hand shoe
r2 pmax b cos 1 c o s 2
M t
sin m
R
0.35 150 2 1.2 60 c o s 0 c o s 120
sin 90
M tR 283500 Nmm or 283.5 N m
For identical shoes, the expressions for M n and M f are
proportional to pmax .
5.126
Design of Transmission Systems
For Left shoe, let pm is maximum pressure on the
left shoe.
Mf
M f p m
pmax
673312.5 pm
1.2
561093.75 pm
Similarly, MN
M n pm
pmax
1706000 pm
1.2
1421666.66 pm
For left shoe,
F
9037.78
M n M f
C
1421666.66 pm 561093.75 pm
177
pm 1.858 N/mm 2
Since, shoes are identical
p m
Torq ue on th e
M tL MtR
le ft hand shoe
pmax
283500 1.858
1.2
438952.5 N mm
438.9525 N mm
Therefore,
The to taltorque
283500 438952.5
capacity of the brace
M t 722452.5 N mm
722.4525 Nm
Cams, Clutches and Brakes
5.127
Alternately
Refer PSG data book, page No 7.99
c o s 1 cos 2
Braking torque b r2
p m p m
sin m
c o s 0 c o s 120
0.35 60 150 2
1.2 1.858
sin 90
472500 0.5 3.058
722452.5 N mm
M t 722.452 Nm
Problem 5.27: An automotive type internal expanding double
shoe shown in fig. is 300 mm in diameter and is actuated by
a mechanism that exerts the same force (F) on each shoe. The
shoes are identical and have a face width of 32 mm. The lining
is a moulded asbestos having a coefficient of friction of 0.32
and a pressure limitation of 1000 k.Pa.
1. Determine the actuating force P, and
2. Find the braking capacity (i.e torque absorbing capacity of
the brake).
Solution
Given data
Diameter 300 mm 0.3 m
b 32 mm 0.032 m
0.32
pmax 1000 kPa
1000 10 3 N /m 2
5.128
Design of Transmission Systems
27
A
F
o
F
1 00
15
0
O
1 26
o
112
O1
O2
B
50
50
27
Fig.
o
(i) Actuating force (F)
The force F is found on the basics that the maximum
pressure occured on shoe, as it is a right hand shoe (self
energizing)
From the fig:
1 0
2 126
126
180
2.199 rad
90
Cams, Clutches and Brakes
5.129
and sin sin 90 1
From the fig, by using phythagorous theorem, we get
OO 1
OB 2 BO 21
112 2 50
2
122.65 mm
Now, the total moment of the normal forces about the
fulcrum O, equal to
Mn
1 pmax b r OO1
1
2 1 sin 2 1 sin 2 2
2
2
sin
1
0.3
1000 10 3 32 10 3
0.12265
2
2
[2.199 0
1
sin 0 sin 2 126]
2
787.27 N m
Again find moment of friction force m f about O 1
Mf
pmax b r
OO1
c os 2 2 cos 2 1
r cos 1 cos 2
4
sin
0.3
0.32 1000 10 3 32 10 3
2
1
0.3
0.12265
[cos 2 126 c o s 0]
[cos 0 c o s 126
2
4
304.174 N m
5.130
Design of Transmission Systems
The actuating force F
F
M n Mf
l
787.27 304.174
0.112 0.100
2278.75 N
(ii) Braking capacity T B
The braking torque T B for right hand shoe is given
by
T B pmax b r2 cos 1 cos 2
2
0.3
0.32 1000 10 3 32 10 3
cos 0 cos 126
2
365.83 N m
Now find T B for left hand shoe.
For identical shoes, the expressions of M n and M f are
both proportional to pmax.
The maximum intensity of pressure for left hand
shoe pmax
M 1N
787.27 p max
pmax
787.27 p max
1000 10 3
7.813 10 3 pmax
and
Cams, Clutches and Brakes
Mf
304.174 pmax
pmax
5.131
304.174 pmax
1000 10 3
3.042 10 4 pmax
F for left hand shoe equal to
F
2278.75
M N M f
l
8.813 10 4 pmax 3.042 10 4 pm ax
0.112 0.100
or pmax 445.04 10 3 N/m2
Torque required by left hand shoe
TB pmax b r2 c o s 1 cos 2
3
0.32 445.04 10 32 10
3
2
0.3
c o s 0 cos 126
2
162.8 N m
The braking torque T is the total torque produced
by both right and left hand shoes.
T T B TB
365.83 162.8
528.64 N m
Problem
5.28: An
automotive
type
internal-expanding
double-shoe brake is shown in figure. The face width of friction
lining is 40 mm and the intensity of normal pressure is limited
to 1 N/mm2. The coefficient of friction is 0.32. The angle 1
5.132
Design of Transmission Systems
can be assumed to be zero. Calculate (i) the actuating force P,
(ii) the torque-absorbing capacity of the brake.
(Apr/May 2008)
30
F
1 00 .9
o
F
1 25 R
1 20
o
8 6.6
50
Fig.
50
30
o
Solution
Assume that the maximum normal pressure will occur
between the lining on right hand shoe and the brake drum.
For right hand shoe
1 0; max 90, when 90
2 120; max 2 when 2 90
Cams, Clutches and Brakes
5.133
Since 2 is greater than 90
m max 90
From given diagram
a 100 mm ; c 187.5 mm ; r 125 mm
Also given
b 40 mm ; 0.32
pmax 1 N/mm 2
Total moment of frictional force
Mf
Mf
pm br
a
r c o s 1 c o s 2 cos 2 2 cos 2 1
4
sin m
0.32 1 40 125
125 cos 0 c o s 120
sin 90
100
cos 2 120 c o s 2 0 ]
4
1600 [125 1 0.5 25 0.5 1]
240000 Nmm
Total moment of Normal force
Mn
pm b r a
1
2 1 sin 2 1 sin 2 2
2
2 sin m
1 40 125 100
1
120 180 2 sin 2 0 sin 2 120
2 sin 90
1
250000 2.09 0 0.866
2
630750 Nmm
5.134
Design of Transmission Systems
F
F
Mn Mf
C
630750 240000
187.5
2084 N
Torque absorbing capacity of brake from P.S.G Data
book, Pg.No. 7.99
Braking Torque
cos 1 cos 2
br 2
pm pm
sin m
cos 0 cos 120
0.32 40 1252
1 pm
sin 90
pm is unknown (i.e.) Max. pressure on left shoe
Hence
Mf
M f p m
pmax
240000 pm
1
240000 pm
Similarly
Mn
M n pm
P max
630750 pm
for left shoe
F
2084
Mn Mf
C
630750 pm 240000 pm
pm 1
187.5
Cams, Clutches and Brakes
5.135
Braking Torque
cos 0 cos 120
0.32 40 1252
i 1
sin 90
600000 Nmm 600 Nm
5.3.10 Energy considerations
When the rotating members of a machine are allowed
to stop by using a brake, the kinetic energy of rotation
must be absorbed by the brake.
When the members of a machine which are initially
at rest and it is required to rotate upto a speed, slipping
occurs between driver and driven until the driven member
rotates with the same speed of driver.
In case of clutch or brake the kinetic energy is
absorbed during slippage.
In the design of mechanical brake, the braking torque
depends on the amount of energy absorbed by the brake.
Let m mass of the mechan ic al system
V 1 Initial velocity
V 2 final velocity
The kinetic energy
1
KE m V 21 V 22
2
absorbed
by
the
brake
Similarly, in case of rotating body,
The Kinetic energy absorbed KE
1 2
I 22
2 1
where I mass moment of inertia of rotating body
m .k2
k radius of gyration
5.136
Design of Transmission Systems
1 Initial angular velocity
2 final angular velocity
The energy absorbed by the brake
E M t Jo ules
where M t Braking torque N m
angle through which the brake drum rotates
during the braking period in radian
1 2
Q
t
2
t time in seconds
5.3.11 Temperature Rise
The energy absorbed by the brake is converted into
heat. The heat produced between rubbing surfaces
increases the temperature of friction materials. When the
temperature rises the coefficient of friction reduces, which
in turn reduces the braking torque. At higher temperature
the wear of friction lining is high, which reduces the life
of lining material. In order to increase the life of tech lining
materials, the temperature should be kept within the
permissible value.
In general, it is very difficult to find the temperature
rise. But according to practical considerations, the given
equation is used for preliminary design.
Refer PSG databook, page No. 7.99
Temperature rise of brake tr
Hg
W Cp
where Hg heat generated per operation
2 n 2 J
k.cal
1800 427
Cams, Clutches and Brakes
J
5.137
polar moment of inertia of the brake drum
assembly. kg f m. sec 2
W w eight o f the brake drum, kg f
C p Specific heat of drum material
0.13 for cast iron
0.116 for steel
n speed of the drum, rpm
In SI units:
Temperature rise t
E
mC
where E Total energy absorbed by the brake (J)
m Mass of the drum assembly (kg)
C Specific heat of the brake drum material
460 J/kg C for cast iron
5.3.12 Friction Materials
A brake or clutch friction material should have the
following characteristics.
1. A high and uniform coefficient of friction
2. High resistance to wear
3. It should withstand high temperatures
4. It should have high heat conductivity
For the characteristics of friction materials,
Refer PSG databook, page No. 7.97
5.138
Design of Transmission Systems
5.4 GENEVA MECHANISM
Refer P.S.G Data book
(Page No. 7.81, 7.82, 7.83, 7.84)
Geneva mechanism consists of a Geneva wheel with
a number of slots and a driving disc (Crank) whose
projected pin enters the slot and causes the intermittent
rotation of the “Geneva wheel.”
This mechanism is used in rotary tables and indexing
turrets in machine tools and in automatic machines. The
number of slots in the mechanism ranges from three to
eight depending on the applications.
Z No. of slots on the driven disc.
OP e Centre distance
OB r Radius of the driving crank
R Radius of Geneva wheel
Semi-indexing angle (driven)
Semi-indexing angle (driver)
Angular velocity of driving crank (Assumed to be
constant)
d Angular velocity of driven disc.
OBP 90 (P. No. 7.81 of PSG Data book)
90
2
Z 2
2Z
2
Cams, Clutches and Brakes
s c l)
D i ee
n Wh
e
iv a
Dr nev
e
(G
5.139
R
wd
P
e
B
90
o
3
O
D riving D isc
(or) C rank
r
Fig.5.23 External Gen eva Mechanisam
1
R
sin cos cos
1 2
e
Z
where R Radius of Geneva wheel.
Length of the slot h
hrRe
e sin
e cos e
Z
2
h e sin c o s 1
Z
Z
r
e
re
r e sin
e sin
1
Z
R e cos
2
Z
5.140
Design of Transmission Systems
h
sin cos 1
e
Z
Z
(or)
The pin enters the Geneva wheel tangentially with
no shock. i.e., The centre lines of the slot and crank must
be mutually perpendicular at engagement and at
disengagement.
The circular segment attached to the crank effectively
locks the wheel against rotation when the roller is not in
engagement, and also positions the wheel for correct
engagement of the roller with the next slot.
For entry without shock,
r
sin sin
Z
e
Z 2
2Z
2
t time taken for one complete rotation of driving
crank, in seconds.
60
n
where n speed of rotation of crank in rpm;
tr
t
Z2
2Z
w here tr resting time, seconds.
Angular acceleration of driven disc, at the start
and finish of indexing.
do 2tan
Z
Cams, Clutches and Brakes
where,
2N
rad /sec
60
Z No. of slots
P
P
d
R
e
A
90 o
A
r
B
e
r
Fig.5.24
tan
sin
1 cos
d Angular velocity of driven disc.
cos
1 2 cos 2
d Angular acceleration of driven disc.
5.141
5.142
Design of Transmission Systems
1 2 sin
2 2
1 2 cos
2
dmax
1
To avoid the wheel overhanging the bearing,
dW
e
2 1 sin
Z
Non-interference of Geneva wheel shaft-with driving
disc (or) The shaft of the driving disc does not interfere
with the geneva disc, the following condition has to be
satisfied.
d
2 1 cos
e
Z
where dW diameter of wheel shaft.
Problem 5.29: The fig. shows a Geneva mechanism used to
obtain intermittent rotary motion from continuous rotation. The
pin A is carried in a constant speed shaft which is rotating
at
100
rpm,
and
it
engages
OP 125 mm; OA 88 mm;
with
a
POA 20;
slotted
member.
Find
the
instantaneous angular velocity and angular acceleration of the
slotted member.
(May/June 2010)
Crank angle 20
N 100 rpm
2N 2 100
10.47 rad/sec
60
60
r
88
e 125
0.704
Cams, Clutches and Brakes
O
20
88
o
1 25
A
P
Fig.5.25
OA r Radius of the driving crank
88 mm
OP e Centre distance
125 mm
Angular velocity of driven disc (or) slotted member
d
c o s
1 2 cos 2
5.143
Design of Transmission Systems
5.144
d
0.704 cos 20 0.704
1 2 0.704 cos 20 0.7042
10.47
1.7372
10.06 rad/sec
0.1725
Angular acceleration of driven disc
d
d
1 2 sin
1 2 c o s 2
2
0.704 1 0.704 2 sin 20
2 2
[ 1 20.704 cos 20 0.704 ]
10.47 2
13.313
448.25 rad/sec 2
0.0297
Problem 5.30: A Geneva wheel is to have six slots. Driving
crank radius is 50 mm. Determine various dimensions of
geneva wheel.
(October 2000)
Solution:
Refer PSG Data book page No. 7.81
Given data:
Z = number of slots on the driven disc 6
r Driving crank radius 50 mm
For entry without shock,
r
sin sin
e
Z
where e Centre distance.
r
sin
Z
e
Cams, Clutches and Brakes
e
5.145
r
sin
Z
e centre distance
50
100 mm
180
sin
6
e 100 mm
But, sin
r
50
0.5
e 100
where, semi – indexing angle (driven)
sin 1 0.5
30
radius ra tio
R r c o t 50
R
cot
r
1
50
86.6025 mm
tan tan 30
Radius of Geneva wheel R 86.6025 mm
h Slot length r R e
50 86.6025 100
h 36.6025 mm
To avoid the wheel overhanging the bearing
dw
e
2 1 sin
Z
180
dw 2 100 1 sin
6
5.146
Design of Transmission Systems
dw 100 mm
Angle of locking action
180
Z 2
6 2 240
6
Z
Indexing time ratio
where Semi – indexing angle driver
30 60
2
2
60
0.333
180
Note: If n 100 rpm, (speed of rotation of crank is given)
then,
t time taken for one complete rotation of the driving
crank in seconds
60
60
0.6
100
n
Time for indexing ti t 0.333 0.6 0.199 sec
Resting time
tn
Z2
62
t
0.6 0.4 sec
Z2
62
Cams, Clutches and Brakes
5.147
5.5 RATCHET AND PAWL MECHANISM
Ratchet and Pawl mechanism is mainly used in
hoisting machines. It allows rotation in one direction and
prevents rotation in other direction. In hoisting machines,
this mechanism allows to raise the load, but prevents the
load falling down due to gravity. The mechanism is shown
in Fig. 5.5.1.
This mechanism consists of (1) Ratchet (2) Pawl.
Ratchet is fitted to the driver shaft and the Pawl is fixed
to the machine frame. The pawl engaging the ratchet locks
the clockwise rotation of the driver shaft. When the rotation
is reversed, the pawl gets disengaged and allows the
ratchet to rotate in counter clockwise direction.
Ratchet and Pawl Mechanism (7.85 and 7.86) Refer
PSG Data book.
1. Material:
Ratchet - Grey cast iron Grade 15 - 30, Cast steel,
C30 and C45.
Pawl - C45, 40 Cr 1
Ratchet and pawl are surface hardened to 50 HRC.
2. No. of teeth on ratchet wheel
Z 6 to 8
12 to 20
16 to 25
3. Values of p - linear unit pressure - P/b kgf/cm
p
P
b
where P Peripheral force (or)
5.148
Design of Transmission Systems
P
G
P
o
D
90
t
b
a1
(a)
(b)
b
P
e1
h
P
a
x
(c)
b
(d)
Fig.5.26
P
p
Steel pawl and C.I. ratchet
- 50 100 kgf/cm
Steel
pawl
and
steel
ratchet - 150 300 kgf/cm
b/m 1.5 to 3.0
2M t
Zm
Z no. of teeth on ratchet
m D/Z (module)
D
tip
circle
dia.
ratchet. m Z
M t torque transmitted
of
Cams, Clutches and Brakes
4. Module: m 2
5.149
Mt
3
Z [ b ]
where [ b ] 300 to 500 kg f/cm 2 (for C45 steel)
Other Dimensions
a m;
h 0.75m ;
bm
5. Bending moment M b P h
Design of Pawl
M b P e1
1
6M b
P
1
Total stress
2 xb
bx
Dia. of the pawl pin d 2.71
a
2 [ ] 2
3
P
b
b
1
where a1 thickness of collar on pawl pin (from table 7.86)
[ b ] for C 45 steel 30 to 50 N/mm2
Problem 5.31: Design a ratchet and pawl mechanism for the
following data:
Braking torque = 180 N-m
Brake drum diameter = 400 mm
Solution:
Given data:
M t 180 N m
1800 kg f cm
(Convert in to kg f cm
5.150
Design of Transmission Systems
Let Z No. of teeth on ratchet 18 assume
Step 1:
Calculate module (m)
Refer PSG databook, Page No. 7.85
2
2
assume 2.5
Mt
3
and [b] 450 kgf/c m2
Z [b]
for ratchet
3
1800
0.8925 c m
18 2.5 450
Take m 1 cm or 10 mm
From data book,
a m 1 cm;
h 0.75 m 0.75 c m
b m 2.5 1 2.5 cm
Step 2:
Peripheral force P
2M t
D
But D Zm
2 1800
200 kg f
18 1
Step 3:
Linear unit pressure
P 200
80 kg f/cm 2
b
2.5
Cams, Clutches and Brakes
5.151
Step 4:
Refer PSG databook Page No. 7.85 Calculation of
diameter of pawl pin
d 2.71
d 2.71
[b]
P b
a1
2[b] 2
FOS
for C45 steel (Pawl)
y 36 kgf/mm 2
3
y
200 25
6
2
2 7.2
Take FOS 5
36
[ b]
5
17.228 mm
Take d 18 mm
7.2 kgf/ mm 2
Refer table (P.No. 7.86)
of PSG Data book
a1 6 mm
b 2.5 cm = 25 mm
Step 5:
Checking stress for pawl
Refer PSG databook page No. 7.85
6M b1
bx
2
P
[b]
x.b
6 2000
25 10
2
200
10 25
4.8 0.8
5.6 kgf/ mm 2
7.2 kgf/ mm
2
Design is safe
M 1 Pe1
e1 a 1 cm 10 mm (assume)
M b 20010
1
2000 kg f mm
x a 1 cm 10 mmassume
b 2.5 c m 25 mm
Two Marks Question and Answers
TM.1
Two Marks Question and Answers
Chapter - I
1.1 Name the types of transmission belts.
Based on the belt
transmission belts are:
cross-section,
the
types
of
1. Flat belt
2. V-belt
3. Round belt.
1.2 What are the commonly used belt materials?
1. Leather
2. Cotton or Canvas
3. Rubber
4. Nylon core
5. Balata
6. Fabric.
1.3 State Law of Belting
The law of belting states that the center line of the
belt as it approaches the pulley must lie on a plane
perpendicular to the axis of that pulley, or must lie in the
plane of the pulley, otherwise the belt will run off from the
pulley.
1.4 Explain the term Crowning of Pulleys
Pulleys are provided with a slight dwell to prevent
the belt from running off the pulley. This is known as
crowning of pulleys. The crowning maybe tapered (or)
rounded. The height of the crown depends upon the width,
speed and length of belt.
TM.2
Design of Transmission Systems
1.5 What are the different types of flat belt drives?
The different types of flat belt drives are:
1. Open belt drive
2. Crossed belt drive
3. Quarter-turn belt drive
4. Compound belt drive
5. Belt drive with idler pulley
6. Stepped or cone pulley
7. Fast and loose pulley drive.
1.6 What are the advantages of flat belt drive?
The advantages of flat belt drive are:
1. They are more flexible and absorb shock loads and
vibration.
2. They are relatively cheap and easy to maintain.
3. They can be
atmosphere.
used
in
dusty
or
abrasive
4. The design of flat belt drive is simple and
inexpensive.
5. They can be used for long distance, even upto 15
m.
6. They are quiet and efficient.
1.7 Why is the face of a pulley crowned?
(Nov/Dec 2009)
To keep the belt running on the pulley face, it is
necessary that the face has to be crowned.
Two Marks Question and Answers
TM.3
1.8 Define maximum tension in a belt?
(Arp/May 2008)
Maximum Tension in a belt T b t
where
m amimum safe stre ss
b width of the belt
t th ickness of the belt
1.9 What is slip in a flat belt drive?
In a flat belt drive, when the frictional grip between
the pulley and belt is insufficient, the driver will have some
forward motion without belt, which is known as slip.
1.10 What is creep in a flat belt drive?
Due to the difference in tensions on tight side and
slack side, the belt undergoes a change in strain as it
passes around the pulley. To compensate for these different
strains the belt moves relative to the surface of the pulley.
This relative movement of the belt is called creep.
1.11 How does creep effect the belt design?
The creep in belt leads to slip, loss of power and
velocity ratio. So, elastic nature of the belt also taken into
account in the belt design.
1.12 What is centrifugal tension in a belt drive?
When the belt runs over the pulley, some centrifugal
force is created due to the belt velocity, which increases the
belt tension on both tight as well as the slack side. The
increase of tension due to centrifugal force is called
centrifugal tension.
TM.4
Design of Transmission Systems
1.13 What are the factors affecting the coefficient of
friction between a belt and pulley?
The coefficient of friction between the belt and the
pulley depends upon the factors like material of belt,
material of pulley, slip of belt, and speed of belt. The value
of coefficient of friction lies between 0.25 to 0.30.
1.14 What are the factors to be considered in design
of a belt drive?
The factors to be considered in design of a belt drive
are power to be transmitted, input and output speeds, the
centre distance, peak load, nature of load, effect of
centrifugal force, the ratio of tight side of slack side tension,
coefficient of friction, etc.
1.15 Sketch the cross section of a V-belt and label its
(Nov/Dec 2009)
important parts.
2 = 40
x
o
Fa bric and
ru bb er co ve r
W
Fa bric
C o rds
T
R u bb er
b
2
Cross-section of a V-b elt
Two Marks Question and Answers
TM.5
1.16 Give the relationship of ratio of tensions in a
V-belt drive.
(Apr/May 2008)
T1
T2
e
sin
where, T 1 Ten sions on tight side
T 2 Tensions on slack side
A ngle of conta ct in radians
S emi groove angle
1.17 State reasons why V-belt drive is preferred over
flat belt drive.
(a) Replacement of V-belt is easy, because V-belts are
available according to standards.
(b) Power transmitted by the V-belts is more.
(c) For smaller centre distances V-belts are more
suitable.
(d) Efficiency is high, when compared to flat belt.
1.18 How will you determine the no. of
required in the design of V-belt drives?
No. of belts n
P Fa
k W Fc F d
P given power in kW
F a service factor
k W power transmitted per belt
F c correction factor for length
F d correction factor for arc of contact.
belts
TM.6
Design of Transmission Systems
1.19 What are the factors affecting the belt life?
The belt life is very much affected by the following
factors. Decrease in pulley diameter, increase in belt
thickness, increase in tight side tension, too large centre
distance, service and environmental conditions, deflection
in load, etc.
1.20 Give few disadvantages of V belt drive over flat
belt drive.
The disadvantages of V belt drive over flat belt drive are:
1. V belts cannot be used for large centre distances.
2. Design of V belts are more complicated.
3. V belts are not so durable.
4. V belts are costly.
5. The centre distance should be exact for V belts.
1.21. What are the advantages of wire rope drives?
(a) High strength to weight ratio.
(b) Silent operation at high speeds.
(c) Greater reliability.
(d) High efficiency.
(e) Low cost.
(f) Ability to withstand shock loads.
1.22 Name some applications of wire rope drive.
Wire rope drive is best suited for the applications
where large amount of power is to be transmitted over a
long distance. Wire ropes are used in elevators, mine hoists,
cranes, conveyors, hauling devices, suspension bridges, etc.
Two Marks Question and Answers
TM.7
1.23 Where are the stresses induced in a wire rope?
A wire rope is generally subjected to the following
stresses.
1. Direct stress due to axial loads.
2. Bending stresses due to bending of ropes over
sheaves.
3. Stresses due to acceleration or retardation of
moving masses.
4. Stresses during starting.
1.24 How are the wire ropes designated?
The wire ropes are designated by a number specifying
the number of strands and number of wires in each strand.
The wire diameter, type of construction and wire material
grade are also included in the designation.
1.25 What is
6 12/6/1?
the
meaning
of
wire
designation
6 - refers to the number of strands
12/6/1 - refers number of wires in a strand are
12 6 1 19.
(i.e. 19 wires are formed by 12 wires over 6 wires
with 1 core wire)
1.26 What is a chain drive?
The chain drive consists of an endless chain running
over two or more sprockets to transmit power. The chain
consists of large number of links connected by pin joints
and the sprockets are toothed wheels with a special tooth
profile.
TM.8
Design of Transmission Systems
1.27 What are the advantages of chain drive?
The advantages of chain drive are:
1. Compact drive when compared to flat-belt drives.
2. No slip between chain and sprocket.
3. High efficiency of the drive.
4. Possibility of driving several sprockets by using a
single chain.
1.28 What is a silent chain?
Silent or inverted tooth chain consists of a series of
links formed form laminated plates. A special profile is
used to reduce noise level for chain links and sprocket. The
links themselves engage with the sprocket teeth directly to
reduce noise. They can be operated at high speeds and has
more reliability.
1.29 How are chains designated?
According to BIS (IS: 2403-1967) the roller chains are
designated as per roller diameter and number of stands in
the chains. For example,
5.0 S IS: 2403-1967 represents single strand chain with
roller diameter 5 mm.
10.0 D IS: 2403-1967 represents double strand chain
with roller diameter 12.17 mm.
24.0 T IS: 2403-1967 represents triple strand chain
with roller diameter 25.5 mm.
1.30 Why is odd number of teeth for sprocket
preferred?
In order to distribute wear evenly on all the chain
links, it is the usual practice to have odd numbers of teeth
Two Marks Question and Answers
TM.9
on the smaller sprocket and an even number of pitches in
the chain.
1.31 What are the types of failure of chain drive?
The various failures in chain drives are:
1. Elongation: It is caused by increased pitch due to joint
wear under the action of tension and dynamic loads during
operation.
2. Failure of Joints and Plates
Improper erection causes misalignment of sprockets
and wear occurs on the plate of the chain, which causes
the failure of joints.
3. Wear of the sprocket teeth
Wear of sprocket occur due to the relative motion
between bush and the teeth.
1.32 What are the main classification of chains?
The main classification of chains are:
1. Roller Chains
2. Bushed Chains
3. Silent (inverted tooth) Chains.
Again the roller and bushed chains are of three types.
(a) Simpler
(b) duplex
(c) Triplex.
TM.10
Design of Transmission Systems
1.33 List the applications of the chain drives.
Chain drives are widely used in machine tools,
material handle equipments, automobiles, bicycles, wood
working machinery, construction machinery, agricultural
machinery, rolling mills, coal cutters, etc.
1.34 Explain the chordal action in chain drive.
When the chain passes over a sprocket, it moves as
a series of chords instead of a continuous arc as in case of
the belt drive. Thus the centre line of the chain does not
have uniform radius.
1.35 What are the limiting values on number of
teeth on sprockets?
The minimum number of teeth recommended for
small sprocket is 17 and the maximum number of teeth on
larger sprocket can be between 100 and 120.
Chapter - II
2.1 State the advantages of the gear drives over
other type of drives.
The advantages of the gear drives over other types of
drives are:
1. Gear drives are positive drives.
2. Suitable for shorter centre distance.
3. The gear drives are better than others in case of
amount of power transmission and efficiency.
4. Change of speed is very easy in gear drives.
Two Marks Question and Answers
TM.11
2.2 State the fundamental law of gearing?
The fundamental law of gear drive states that the
common normal to the tooth profile at the point of contact
should always pass through a fixed point, called the pitch
point, in order to obtain a constant velocity ratio.
2.3 How is gear classified?
1. Based-on peripheral velocity
(i) Low velocity (0 to 3 m/s)
(ii) Medium velocity (3 to 15 m/s)
(iii) High velocity (15 m/s and above).
2. Based on mutual position of shafts
(i) Parallel shafts-spur, helical, herringbone gears.
(ii) Intersecting shafts-straight bevel, spiral bevel
gears.
(iii) Non-Parallel,
non-intersecting
helical, spiral, hypnoid gears.
shafts-crossed
3. Based on the relative motion of shafts
(i) Row gears-(relatively motion of shafts are fixed).
(ii) Planetary and differential gears.
4. Based on contact area
(i) External gears
(ii) Internal gears.
5. Based on teeth on wheel
(i) Straight teeth-spur gears
(ii) Helical teeth-helical, herringbone gears
(iii) Inclined teeth-bevel gears
(iv) Curved teeth-spiral gears.
TM.12
Design of Transmission Systems
2.4 Define the following terms of a gear. (a) pressure
angle ; (b) diameteral pitch D p
Pressure angle : It is the angle between the common
normal of two gear teeth profiles at the point of contact
and the common tangent at the pitch point.
Diametral pitch D p: It is the ratio of number of teeth
of the pitch circle diameter in inches.
2.5 Define ‘module’ of a gear.
The module is a basic parameter, by which a gear
tooth is specified and is equal to the ratio between pitch
circle diameter in millimeters and number of teeth.
2.6 What is a pitch point?
The intersecting point of the line of action and the
line joining the axes of two mating gears is called as pitch
point. The circle drawn through pitch point, from gear
centre is called pitch circle.
2.7 What is interference in gears?
In a pair of gears in mesh, the possibility of the tip
of one tooth digging into the portion of the flank of the
mating tooth gear can occur in certain conditions. This
phenomenon is termed as interference.
2.8 How can interference in gears be avoided?
The interference in gears can be avoided by ensuring
that the point of contact between the two teeth always
remains on the involute profiles of the both the teeth. This
also can be avoided by,
(1) reducing the tooth height,
(2) increasing the pressure angle, and
(3) the radial flank of pinion teeth be cut back.
Two Marks Question and Answers
TM.13
2.9 What is the minimum number of teeth on pinion
to avoid interference?
The minimum number of teeth on the pinion in order
to avoid interference are given in the following table.
Pressure angle
14.5
20
Z min (Theoretical)
32
17
Z min (Practical)
27
14
2.10 Explain undercutting in gears.
While generating gear teeth, if there is interference
of the cutter with the rotating job, then a recess is cut at
the root of the gear tooth which is known as
undercutting. This happens when the cutter extends
beyond the base circle of the pinions having small number
of teeth.
2.11 What is backlash?
Backlash is defined as the play between a mating pair
of gear teeth in assembled condition. It is the amount by
which the width of the tooth space exceeds the thickness
of the meshing tooth measured on pitch circle.
2.12 What are skew gears and list its application?
When the helical gears are mounted on non-parallel,
non-intersecting shafts, and mesh with each other, they
form a skew gearing (or) crossed helical gearing.
Skew gears are used to drive the cam shafts and
auxiliaries on small internal combustion engines, feed
TM.14
Design of Transmission Systems
mechanisms on machine
automobile engines, etc.
tools,
distributor
drive
of
2.13 Give the requirements of a gear materials.
The main requirements for a gear materials are low
cost, easy to manufacture, high strength, high wear
resistance, low coefficient of friction and noiseless
operation.
2.14 What are the materials commonly used for
gears?
Cast iron, steel, brass, Al-Zinc alloy, phosphor bronze,
nonmetallic materials like wood, fibre reinforced plastics,
backlite, mica, vulcanized rubber, composites, lead/graphite,
pressed paper, etc. are commonly used as gear materials.
2.15 What are the main types of gear tooth failure?
(May/June 2013)
(i) Tooth breakage (due to static and dynamic loads)
(ii) Tooth wear
(a) Abrasion
(b) Pitting
(c) Scoring or seizure
2.16 What are the common profiles used for gear
tooth?
The common types of profiles used for gear tooth are:
1. Involute
2. Cycloidal
3. Combination of the above two (composite system)
Two Marks Question and Answers
TM.15
2.17 Write any two properties of involute curve.
Involute curve has the following properties.
1. The shape of the involute is dependent only upon the
size of the base circle.
2. If one involute, rotating at a uniform rate of
motion, acts against another involute, it will
transmit a uniform angular motion to the second,
regardless of the distance between the centers of
the two base circles.
2.18 What are the characteristics of cycloidal gears?
Cycloidal gears do not have interference. A cycloidal
tooth is stronger than involute tooth because it has
spreading flanks in contrast to the radial flanks of an
involute tooth. Also cycloidal gear teeth have less sliding
and therefore less wear, better contact and lower contact
stress.
2.19 Compare involute and cycloid profiles.
Pressure angle
Involute profile
Constant
Cycloid profile
Varies from zero
Running
Manufacturing
Velocity ratio
Smooth
Easy
Small variation
to maximum.
Less smooth
Complicate
This does not
in centre distance
does not affect
permit any
variation in
velocity ratio
centre distance.
2.20 What are the disadvantages of using cycloidal
profile for a gear tooth?
The disadvantages of using cycloidal profile for a gear
tooth are:
TM.16
Design of Transmission Systems
1. The cycloidal profile cutters are formed with
greater difficulty and with less accuracy.
2. The cost of machining cycloidal profile is very
high.
3. Accurate centre distance setting of cutter is
required.
4. The cycloidal profile does not permits even a
small variation in centre distance of gears without
undercutting or variation in velocity ratio.
5. In the cycloidal profile system, the pressure angle
varies from zero at pitch line to maximum at the
tip of the teeth.
2.21 What are the general characteristics of spur
gearing?
The general characteristics of spur gearing are:
1. Transmit torque between parallel shafts.
2. Teeth are parallel to axis.
3. Line contact takes place during mating.
4. Can be used as sliding gears in gear boxes.
5. Easy to design and manufacture.
2.22 What are the applications of spur gears?
The spur gears are used in sliding gearboxes, machine
tools, automobiles, material handling equipments, rolling
mills, marine power plants, etc.
2.23 Why are spur
applications?
gears
preferred
for
certain
Spur gears are preferred for certain applications due
to following reasons.
Two Marks Question and Answers
TM.17
1. Provision can be made for shifting of gears
2. Higher efficiency (99%)
3. The maintenance of drive is inexpensive and life
is long
4. Design and
economical.
fabrication
is
easier
and
more
2.24 What is interchangeability of gears?
In a gear drive the ability of replacing a failed gear
by a similar gear (same tooth form) without affecting the
functionality of the drive is called interchangeability of
gears. This interchangeability is available in spur and
helical gears.
2.25 What is meant by cluster gears?
If two or more gears are cut on same blank with gap
between them and they are functioning as a single unit,
then they are called as cluster gears. The cluster gears
are widely used in speed gearboxes as sliding gears. They
are manufactured either by die forging, smith forging or by
turning form bar stock and the teeth are machined.
TM.18
Design of Transmission Systems
2.26 How teeth does contact occur in spur and in
helical gears?
In spur gears, the contact between meshing teeth
occurs along the entire face width of the tooth. In helical
gears, the contact between meshing teeth begins with a
point on the leading edge of the tooth and gradually
extends along the diagonal line across the tooth.
2.27 What are the advantages of helical gears over
straight spur gears?
The advantages of helical gears over straight spur
gears are:
1. High peripheral speed (20 to 35 m/sec).
2. Low noise.
3. High power transmission.
4. More smooth engagement, etc.
2.28 What are the demerits of a helical gear?
The demerits of a helical gear are:
1. The axial thrust is produced (thrust bearings are
required)
2. Complicated design (design is based on equivalent
number of teeth)
3. Machining of gear is difficult and costly
4. The transmission efficiency is slightly less
compared to the spur gear.
2.29 Differentiate between the normal pitch and
axial pitch in helical gears.
The axial pitch is the distance parallel to axis
between similar faces of adjacent teeth, whereas normal
pitch is the distance between similar faces of adjacent teeth
along a helix on the pitch cylinders normal to the teeth.
Two Marks Question and Answers
TM.19
2.30 Show the circular pitch, normal pitch in a
helical gear using a sketch.
2.31 What is the virtual number of teeth in a helical
gear?
The virtual number of teeth or equivalent number of
teeth of a helical gear is the number of teeth on an
assumed equivalent spur gear whose pitch circle is in a
plane perpendicular to helical tooth. The virtual number of
teeth is given by,
Zv
Z
cos
Where ; Z number of teeth.
2.32 What are the ranges of helix angle used for
helical gears?
Helical gears have helix angle between 8 and 25.
Herringbone gears used in industrial gears have helix angle
between 20 and 30 and herringbone gears used in turbines
have helix angle upto 45.
TM.20
Design of Transmission Systems
2.33 What is a herringbone gear?
A gear fabricated such that half of its width is cut
with helix in one direction and other half of the teeth is
cut in opposite direction is called herringbone gear. The
herringbone gears are cut with help of gear shaping
machine. They do not induce any axial component of force
as in case of helical gears.
2.34 When do we prefer herringbone gears?
Herringbone gears are preferred to transmit large
power, without any noise and axial thrust. They are applied
in rolling mills, drive of reciprocating machineries, drive for
hoisting machineries, drive for machines tools, drives for
alternators from steam turbines, etc.
2.35 What are the
herringbone gear?
merits
and
demerits
of
The merits of a herringbone gears are silent
operation, absence of vibration and axial thrust, higher
efficiency, higher velocity ratio and high load carrying
capacity with high speeds and the demerits are high cost
and requirement of large space.
Chapter - III
3.1 State the use of bevel gears.
(Apr/May 2008)
The bevel gears are used for transmitting power at a
constant velocity ratio between two shafts whose axes
intersect at a certain angle.
Two Marks Question and Answers
TM.21
3.2 What are the various forces acting on bevel
gears?
The normal force F n acting
on
bevel
gear
tooth
is
perpendicular to tooth profile and
making an angle with pitch
circle. This normal force is
resolved
into
tangential
component F t radial component
(F r ) p
Pinion
(F a ) p
(F r ) g
(F a ) g
G ear
F r and axial component F a.
F r Fttan c o s
F a F ttan sin
where pressure angle and pitch angle.
2M t
Ft
;
d
av
M t torque on bevel gear
dav pitch circle and of bend gear.
3.3 What are Mitre gears.
When the angle between two shafts is 90 and no. of
teeth on pinion is equal to no. of teeth on wheel (i.e.
Z 1 Z2 and i 1 ), then the arrangement of bevel gears are
called mitre gears.
3.4 What are the crown gears.
When the bevel gears connect two shafts whose axes
intersect at an angle greater than a right angle and one
of the bevel gear has a pitch angle of 90, then it is known
TM.22
Design of Transmission Systems
as a crown gear. The crown gear corresponds to a rack in
spur gearing.
3.5 Classify the bevel gears.
The bevel gears are classified as
1.
3.
5.
Straight bevel gears
Zerol bevel gears
Spiroid gears
2.
4.
6.
Spiral bevel gears
Hypnoid gears
Mitre gear.
3.6 What are the advantages of spiral bevel gears
over straight teeth bevel gears?
The advantages of the curved tooth spiral bevel gears
over the straight ones are in general the same as those of
helical gears over spur gears, namely lesser noise, greater
contact ratio, gradual engagement of the mating teeth,
greater load carrying capacity (15 to 25%), lesser vibrations,
etc.
3.7 Define the following gears. (a) Zerol bevel gear
(b) Hypnoid gear.
Zerol bevel gear is a patented bevel gear having curve
teeth but with a zerol spiral angle.
Hypnoid gear is similar to spiral bevel gear but with the
axis of the pinion is offset from the axis of the gear. In
hypnoid gears pitch surfaces are hyperboloids of revolution.
The tooth action between such gear is a combination of
rolling and sliding.
3.8 What are the advantages of hypnoid gears over
bevel gears?
The advantages of hypnoid gears are comparatively
smoother action and possibility of extending the shafts past
Two Marks Question and Answers
TM.23
each other. So the bearings can be used on both sides of
the gear and the pinion. This makes the drive more rigid
and hence higher power can be transmitted than bevel
gears.
3.9 Why is hypnoid gear used in automobiles?
The hypnoid gear is used in automobile gear box
because the drive can be placed beneath the floor level.
3.10 Differentiate between the spiral bevel gears and
hypnoid gears.
The spiral and hypnoid gears are similar and the
most important difference being that the pinion axis of
hypnoid gear set is offset above or below the gear axis.
3.11 How are bevel gears classified based on pitch
angle?
Based on pitch angle the bevel gears are classified as
External gears 1 2 90
Internal gears
1 2 90
Crown gears
1 or 2 90
Miter gears
1 2 45
Where 1, 2 are pitch angles of pinion and gears
respectively.
3.12 When do you prefer worm and worm wheel
drive?
We prefer the worm and worm wheel drive in
following circumstances:
1. In large reduction in velocity ratio is required
TM.24
Design of Transmission Systems
2. Self locking specially is required
3. To connect non-intersecting perpendicular shafts.
3.13 List various application of worm gear drive.
The worm gear drives are used to connect
non-intersecting shafts whose axes are right angles to each
other. They are used in cranes, lifting machines, automobile
steering mechanism, indexing head, table drive for hobbling
machine, auto feed drive in lathe carriage, reduction gear
boxes, etc.
3.14 Give the advantages of worm gear drive.
The advantages of the worm gear drive are:
1. Transmission ratio upto 500:1 with comparatively
low weight.
2. Smaller
overall
requirement.
dimensions
and
space
3. Smooth and noiseless operation.
4. Irreversibility or self locking ability.
3.15 What are the disadvantages of worm gear
drive?
The disadvantages of worm gear drive are:
1. Wear is more due to sliding.
2. Transmission efficiency is less (only 65 to 70%).
3. Not suitable for high power applications.
4. Drive is costlier because use of materials like
phosphor bronze.
5. High amount
lubricating oil.
heat
to
be
dissipated
using
Two Marks Question and Answers
TM.25
3.16 What are the factors controlling the efficiency
of the worm drive?
The factors controlling the efficiency of the worm
drive are lead angle, number of starts in worm, surface
finish, type and amount of lubrication and type of design
of the system. The efficiency of the worm gearing also
depends on the material of the worm and worm wheel and
the rubbing velocity.
3.17 How efficiency of worm drive can be increased?
Worm drive efficiency can be increased by
1. Increasing the lead angle.
2. Using multistart worm with small diameter.
3. Improving finish, lubrication, etc.
4. Using rigid, non-yielding worms with smooth,
ground or polished flanks.
3.18 Define terms of worm gear drive. (a) helix
angle, and (b) lead angle.
Helix angle: It is the angle between the tangent to the
thread helix on the pitch cylinder and the axis of the worm.
Helix angle of worm wheel + lead angle of worm = 90
Lead angle: It is the angle between the tangent to the
pitch helix and the plane of rotation.
3.19 In which gear drive self-locking is available?
Self-locking is available in worm and worm wheel
drive. Condition for self-locking is the friction angle of the
surfaces in contact is greater than the lead angle of the
worm.
TM.26
Design of Transmission Systems
3.20 What is irreversibility in worm gears and how
is it obtained?
The worm drive is so designed that the gear can not
turn the worm although the worm can turn the gear. If
the worm wheel is unable to drive the worm, the
phenomenon is called irreversibility (ability to transmit
motion in one direction only). The irreversibility is obtained
by having the friction angle of worm greater then the lead
angle. It is also known as self locking ability of the gear.
3.21 Write short notes on worm and worm wheel?
The relative sliding of the profiles of the mating
members in a worm gear drive leads to seizure due to wear.
Therefore the allowable (or) designed contact stresses are
assigned depending on the combination of contacting
materials and the velocity of sliding.
3.22 Name the materials used for the manufacture of
worm and worm wheel?
Materials for Worm
Worms are made of steel.
Low carbon alloy steels case hardened to 55 to 63 RC
Medium carbon alloy steels surface hardened to 50 to
55 RC.
Materials for Worm Wheel
Cast iron used for low speed, light duty drives velocity upto 2 m/sec.
Tintless bronzes and brasses are used for velocities
upto 8 m/sec.
Cast tin, bronzes are used for velocities upto 25 m/sec.
Two Marks Question and Answers
TM.27
3.23 Usually worm is made of hard material and
worm gear is made of softer material - Justify.
(Nov/Dec 2009)
Because of relatively high sliding velocities the worm
material is harder than the worm wheel material. The
worm goes through many more contact stress cycles than
the worm wheel, so it is advantageous to use harder, more
durable material for the worm.
3.24 Why is the crossed helical gear drive not used
for power transmission?
(Nov/Dec 2007)
When helical gears are mounted on non-parallel
shafts (i.e.) crossed helical gears, the gears may be of same
or opposite hand. Crossed helical gears are essentially
non-enveloping worm gears. The teeth have point contact
with each other. For this reason they will carry only very
small loads and hence they are for instrumental
applications and not for transmission of power.
3.25 What is Lewis (tooth) form factor?
(Apr/May 2008)
F t bm b Y
where the Y y, is called the Lewis from factor;
whose value depends on the number of teeth and pressure
angle of the gear drive. The empirical relations for the
Lewis form factor are
for a 20 involute full-depth tooth
0.912
Y 0.154
Z
TM.28
Design of Transmission Systems
for a 20 sub tooth
0.95
Y 0.175
Z
for a 14.5 tooth
0.684
Y 0.124
Z
3.26 What is the main disadvantage of a helical
gear drive? How is it eliminated?
The helical gears drive will produce axial thrusts. The
axial thrusts can be eliminated by the use of double helical
gears. Both hands produce axial thrusts which are equal
and opposite to each other, so they nullify each other.
3.27 What is helix angle?
A helix angle is the angle between any helix and an
axial line on its right.
3.28 What is the helix angle of a herringbone gears?
The helix angle of a herringbone gear ranges from
25 to 40.
3.29 What are the various materials used for the
production of gears?
The materials used for the production of gears are:
Metallic Materials
1. Plain carbon steels
2. Alloy Steels
3. Cast iron
4. Bronze (Worm wheel)
Two Marks Question and Answers
TM.29
Non - Metallic Materials:
1. Wood
2. Synthetic resins
3. Compressed papers
3.30 What are the various losses in the worm gear?
Meshing occurs with sliding action, which is greater
than that of a toothed gears, because of this the friction
and intensive heating of the drive takes place. Therefore,
it results in power loss.
3.31 What is a power screw?
Power screw is power transmission device which is
used to convert rotary motion into reciprocating motion
with help of a screw and nut mechanism.
3.32 What are
screws?
the
main
application
of
power
The power screws are used to
1. Raise the load.
2. Obtain an accurate motion in machine tools, e.g.
Leadscrew of lathe.
3. Clamp the workpieces, e.g. Vices.
4. Load the specimen, e.g. Universal testing machines.
3.33 What are advantages of power screws?
The main advantages of power screws are:
1. Large load carrying capacity with small overall
dimensions.
2. Simple design and easy to manufacture.
3. Provides large mechanical advantages.
4. Smooth and noiseless operation.
TM.30
Design of Transmission Systems
3.34 What are the various types of screw threads
used in power screws?
The various types of threads used in power screws are:
1. Square threads: high efficiency and difficult to
machine.
2. Acme threads: wear can be taken care of by use
of split nut.
3. Butters
threads:
transmission, stronger
threads.
unidirectional
power
than other types of
4. Ball round threads (ball screws): no backlash,
hither efficiency.
3.35 How is self locking obtained in power screws?
In order to make a screw as a self locking one, the
helix angle chosen should be low to introduce intentionally
a frictional force that is sufficient to prevent reverse
motion. In other words a screw will be self locking, if the
helix angle is less than friction angle.
Chapter - IV
4.1 Define the progression ratio of a gear box.
If the speed steps in a gear box are arranged in a
manner to have the ratio adjacent speeds is constant, then
the progression ratio (step ratio) is called geometric
progression ratio .
N 1 first speed,
N2 N1
N3 N2
Two Marks Question and Answers
TM.31
4.2 What are the various components of automation
speed reducers?
Casing shafts, lay shaft, spine shaft, bearings, gears,
keys, spacers. (To maintain space between gear and
bearings) etc...
4.3 Where do you use speed reducers.
A speed reducer is a gear mechanism, which is used
to reduce the angular speed of the output shaft as
compared with that of input shaft.
In a multi-speed gear box, the speed of the output
shaft is varied in discrete steps, these may be increased or
decreased speeds, from the input speed.
4.4 What type of gear will you recommend for silent
operation of gear boxes?
The gears recommend for silent operation of gear
boxes are helical gears.
4.5. Name the types of speed reducers?
1.
According to the type of drive (Spur, helical, bevel
and Worm gears)
2.
According to the no. of stages (single-stage,
double-stage)
3.
According to the arrangement
(Horizontal,
Parallel,
Vertical,
Intersecting).
of
shafts
Co-axial,
4.6 Why are spacers applied to gear box?
The spacers in the gear box are used to maintain
distance between the gears and the bearings.
TM.32
Design of Transmission Systems
4.7 What is the structural diagram of a gear box?
The structural diagram represents the arrangement
of shafts, and the arrangement of movable and fixed gears.
4.8 What does
indicate?
the
‘ray-diagram’
of
gear
box
The ray diagram of a gear box, represents the no. of
output speeds, no. of stages required and also the no. of
shafts required.
4.9 What are the important components of a gear box?
1. Proper housing to support the bearings, to hold
lubricants and to protect the unit from dirt and
dust.
2. Shafts for mounting gears.
3. Suitable bearings to support the shafts.
4. Spacers to maintain distance between the gears
and the bearings.
4.10. Draw the structural diagram of a Gear box.
For A 6-speed gear box
Structural formula Z P1X1, P2X2, P3X3
P1, P2 X1 1, X2 P1 3, X3 P1 P2 3.2 6
Z 3 1,
2 3
1st
2nd
x
1 60 0
E
The No (3) indicates
No. of speeds. The No.
inside the bracket indicates
No. of spaces in speed
diagram.
C
D
1 25 0
1 00 0
B
8 00
6 30
A
5 00
1 St S tag e
Second Sta ge
Two Marks Question and Answers
TM.33
4.11 What is a multi-speed gear box? Explain?
When the no. of output speeds are more than four,
then the gear box is known as multispeed gear box. The
multi speed gear box is used in machine tools to obtain
more output speeds such as 6,9,12 speeds.
4.12 What is a gear box?
A gear box is a device employed for stepped regulation
of the input speed and to give required output speed. It
consists of gears, shafts, levers, keys, bearings, etc.
assembled in a housing.
4.13. What is the use of gear box in a machine tool?
The gear box is used in a machine tool to get
1. Required torque and speed.
2. Multispeed in more number of steps.
3. Change in the direction of rotation.
4.14 Give the applications of the speed reducers.
The speed reducers are used in turbine generators,
between motor and machine tools, in rolling mills, between
engine and road wheels in automobiles and in many
industrial processing like cement factories, paper plants,
chemical industries, etc.
4.15 What is step ratio?
The ratio between the adjacent
multispeed gearbox is called step ratio.
speeds
in
a
TM.34
Design of Transmission Systems
4.16 Why are the steps of speed arranged in
geometric progression in a machine tool gear
box?
The steps of speeds of a gear box of machine tools
are arranged in geometric progression because it provides,
1. Constant loss of economic cutting speed in whole
rpm range
2. Constant loss of productivity in the whole rpm
range
3. Better design feature
4. Compact design, etc.
4.17 What are the considerations to select a
particular transmission group in a gear box?
The transmission ratio must lie in the following
range.
1. The maximum reduction of speed is limited to four
times to keep the radial dimensions of gear box
1
within the reasonable limits. i.e. imin
4
2. Maximum increase of speed in a stage is
restricted to two times due to limitations of the
pitch line velocity.
In a transmission group. i.e. imax 2 .
4.18 What are the informations
structural diagram?
given
Structural diagram gives informations about
1. Number of shafts in a gear box.
2. Number of gears in shaft.
by
a
Two Marks Question and Answers
TM.35
3. The order of changing transmission in individual
groups to get a desired speed.
4. Transmission range and characteristic of each
transmission group.
4.19 Distinguish between structural diagram and
ray (speed) diagram.
The
structural
diagram
shows
the
general
arrangement of the gear transmission, where as the ray
diagram gives the gear arrangement for the required output
speed.
4.20 What are preferred numbers?
(May/June 2013)
Preferred numbers are the conventionally rounded off
values derived from geometric series. There are five basic
series, denoted as R5, R10, R20, R40 and R80 series.
4.21 What are the possible arrangements to achieve
12 speeds from a gear box?
(May/June 2013)
(i) 3 2 2 scheme (ii) 2 3 2 scheme
(iii) 2 2 3 scheme
4.22 Which type of gear is used in constant mesh gear
box? Justify.
(Nov/Dec 2009)
Planetary reduction gears are remarkable for compact
layout and higher gear ratios. These reduction gears are
widely employed in aircraft, helicopters and winches and
other machines. The weight of planetary reduction gears
can be decreased two to three times as compared with
ordinary toothed gears of same power and gear ratios.
TM.36
Design of Transmission Systems
4.23 Compare sliding mesh and synchromesh gear
box.
(Nov/Dec 2009)
Sliding mesh gear box is simplest type of gear box.
The clutch gear is rigidly fixed to clutch shaft. It remains
always connected to the drive gear of the lay shaft. The
required speed is obtained by shifting the gears in counter
shaft by selective mechanism.
Synchromesh gear box is used to synchronize the
rotation of gears that are about to be meshed. Due to
friction, the rotary pinion is made to rotate at the same
speed as the synchromesh unit.
4.24 List six standard speeds starting from 18 rpm
with a step ratio 1.4.
(Apr/May 2008)
Consider
R20
step ratio 1.12
1.12
series,
which
1.12 1.12
1.4
skip 2 speeds
Take R20 series by skipping (2) speeds.
N 1 18 rpm
N 2 25 rpm
N 3 35.5 rpm
N 4 50 rpm
N 5 71 rpm
N 6 100 rpm
is
having
Two Marks Question and Answers
TM.37
4.25 Sketch the kinematic layout of gears for 3
(Apr/May 2008)
speeds between two shafts.
Z4
Z2
Z6
D rive r
D rive n
Z3
Z5
Z1
4.26 List out the Basic rules to be followed for
optimum gear box design.
To avoid excessively large diameter of the wheel and
also to limit the pitch line velocity of the gears.
1. Number of gears on the last (spindle) should be
minimum.
2. Number of gears on the shafts should not be more
than 3, though in exceptional cases it may be 4.
3. It is preferable to have N max N input N min in all
stages except in first stage.
4. The transmission ratio between the spindle and
the shaft preceding it should be the maximum
possible (i.e.) speed reduction should be maximum
possible.
TM.38
Design of Transmission Systems
Follow for all stages
N max
N input
2 and
N min
N input
1
4
If it is not possible
keep
N max
N input
N input
N min
(Or)
keep
N max
N input
N input
N min
4.27 Explain why the discrete speeds are specified
in geometric series for any machine tools?
(Apr/May 2008)
The speeds of the spindle should be in the geometric
series, in order that the number of gears employed is to
be minimum and also to reduce speed loss. Preferred No.
are in geometrical progression.
4.28 Why gear boxes are provided with housings?
Gear boxes are provided with housings because of the
following reasons.
1. Supports for the shafts.
2. Hold lubricant inside.
3. Protects the gears from dust and moisture.
4. Gives necessary cooling surface to dissipate the
heat generated.
Two Marks Question and Answers
TM.39
4.29 What is preferred structural formulae?
The no. of speeds required when given in the
multiples of 2 and 3 is known as preferred structural
formulae.
4.30 Where are speed reducers applied?
Speed reducers are widely used for reduction of speed
is turbine generator set, from motor to machine tool
spindles, in rolling mills and in automobiles.
Chapter - V
5.1 What is a cam?
Cam is a mechanical member having miscellaneous
contour surface which transmits a desired motion to a
follower by direct contact. With help of cam, it is very easy,
accurate and efficient to produce a motion with required
velocity and acceleration.
5.2 Give the list of types of cams used in industries.
The common types of cams used in industries are :
(1) Wedge cam (2) Radial cam (3) Globoloidial cam
(4) Cylindrical cam (5) Spherical cam (6) 3-dimensional cam
(3D) and (7) Inverse cam.
5.3 Give some applications of cams.
Cams are used in wide variety of machines such as,
packaging machines, can making machines, wire forming
machines,
IC
engines,
machine
tools,
computing
mechanisms, mechanical and electronic computers, etc.
TM.40
Design of Transmission Systems
5.4 Why are cam mechanisms preferred?
The cam mechanisms are preferred over other types
because the use of cams makes it possible to obtain an
unlimited variety of motions and the cams perform
satisfactorily year after year. The mechanical movements
from cams are not readily obtained by other types of
mechanisms.
5.5 Define following terms of a cam (a) trace point,
(b) stroke.
Trace Point: This is a reference point on the follower
which is used in laying out the theoretical curve or pitch
curve of the cam.
Stroke: This is the maximum movement of the follower
away from the cam shaft from its initial position. This also
known rise or life or throw of the cam.
5.6 Define the following (a) pitch point (b) jerk
Pitch point: It is the point on the cam pitch having the
highest pressure angle.
Jerk or pulse: The instantaneous time rate of change of
acceleration is called as jerk or pulse (i.e. sudden change
in follower acceleration).
5.7 What is the pressure angle?
It is the angle between normal to cam profile and
line of action of cam follower at the point of contact. The
pressure angle represents the steepness of cam profile. The
pressure angle is limited to 30 for smooth cam-follower
action.
Two Marks Question and Answers
TM.41
5.8 What is the importance of pressure angle in cam
design?
The size of pressure angle is important because
1. Increasing pressure angle increases the side
thrust and this increase the forces exerted on cam
and follower.
2. If the pressure angle is too large, jamming of
follower takes place,
3. Reducing the pressure angle increase the cam
size.
5.9 Define the following (a) base circle (b) offset
Base circle: It is defined as the smallest circle which is
drawn tangent to the physical cam surface.
Offset: It is defined as the perpendicular distance between
the follower’s axis of motion and the centre of the cam.
5.10 What are the common types of cam followers?
The common types of cam followers are:
According to shape: Knife edge follower, flat faced
follower, spherical faced follower and roller follower.
According to
oscillating follower.
motion:
reciprocating
follower
and
5.11. Write short notes on side thrust on: Flat, Knife
edge and Roller follower.
Knife edge follower is subjected to excessive wear due
to sliding motion. If the load on the follower is small, this
follower can be used.
The roller follower has rolling contact, so wear is less.
TM.42
Design of Transmission Systems
The roller and knife-edge
subjected to side thrust.
follower
guides
are
Incase of flat face follower, there is no side thrust.
5.12 What is undercutting in cams?
When a cam has a sharp point or corner, the follower
does not undergo an abrupt change of motion, but gradually
a different velocity. If the roller radius is greater than the
theoretical pitch curve at the convex portion of the cam,
the roller undercuts. i.e., moves itself over the same path
twice. This phenomenon is called under cutting.
5.13 Why a roller follower is preferred to that of an
knife-edge follower?
Knife edge follower is subjected to excessive wear due
to sliding motion. Roller follower has rolling contact, hence
the wear is less. If the load on the follower is small,
knife-edge follower can be used.
5.14 What is a clutch and why is it necessary?
A clutch is a machine member used to engage or
disengage a driving member with driven member. The
clutch is required for the following circumstances.
1. To engage and disengage driving and driven
member will without stopping the engine.
2. To avoid overloading of driving member.
5.15 What are the various types of friction clutches?
The friction clutches are classified according to:
1. Use: Connecting
directional clutches.
clutches,
starting
clutches
and
Two Marks Question and Answers
TM.43
2. Construction: Shoe and cone clutches, disc clutches
and band clutches.
3. Friction pairing and lubrication: Dry and lubricated
clutches with or without special friction lining.
4. Operation: Mechanical clutches, magnetic clutches,
hydraulic or pneumatic operated clutches.
5.16 What are
clutch?
the
characteristic
of
a
positive
The characteristics of a positive clutch are:
1. They do not slip; so no heat is generated.
2. They can not be engaged at high speeds.
3. Engagements
shocks.
at
any
speed
accompanied
by
5.17 Why are the friction clutches preferred?
The friction clutches are preferred, because:
1. They transmit torque at the desired rate.
2. They permit smooth engagement at all speeds.
3. They permit variable output and regulation in
output.
4. They are simpler, smaller and invariably much
cheaper than fluid or electrodynamic clutches.
5.18 What are the required qualities for a friction
material used in clutches?
The required qualities for a friction material used in
clutches are:
1. High and uniform coefficient friction
2. Unaffected by environmental conditions
TM.44
Design of Transmission Systems
3. Ability to withstand high temperature together
with good heat conductivity
4. Good resilience, high wear resistance, scoring and
galling.
5.19. What is the axial force required at the
engagement and disengagement of cone clutch?
(May/June 2013)
W W n 1 c o t
5.20 Why is it necessary to dissipate the heat
generated during clutch operation?(Nov/Dec 2009)
In order to save the friction plates and lining
materials from melting by the heat produced during
operation, the generated heat should be dissipated.
5.21 Clutches are usually designed on the basis of
uniform of wear. Why?
(Apr/May 2008)
In clutch design, generally two cases are considered.
In one case it is assumed that the intensity of the pressure
on friction surfaces is constant. This assumption is valid
only when the discs are relatively flexible. On the other
hand, if the discs are rigid, wearing of the friction surface
is approximately uniform after initial wearing - in has
taken place. In practical situations, neither of these
assumptions (uniform pressure or uniform wear) is correct.
So the designer has to choose a hypothesis which is more
close to the actual situation. Alternately, it is better to
assume a uniform wear rate because it is more conservative
than assuming uniform pressure but it results into lower
torque transmission capacity.
Two Marks Question and Answers
5.22 Sketch a cone clutch.
TM.45
(May/June 2007)
5.23 Define a brake?
Brake is a device which is used to stop the motion
of a moving body or retard its motion. It is due to the
friction between the contact surface.
5.24 What are the factors required to design a
brake?
The factors required to design a brake are:
1. Coefficient between the braking surfaces.
2. Unit pressure between braking surfaces.
3. The projected area of the breaking surface.
4. Heat dissipating capacity.
5.25 What are the different types of brakes?
The different types of brakes are:
1. Simple block (or shoe) brake
2. Pivoted block (or shoe) brake
3. Double block (or shoe) brake
TM.46
Design of Transmission Systems
4. Simple band brake
5. Differential band brake
6. Band and block brake
7. Internal expanding brake.
5.26 List few
materials?
properties
of
a
brake
friction
The brake lining materials should have the following
properties.
1. It should have high coefficient of friction.
2. It should have high wear and heat resistance.
3. It should have high heat dissipation capacity.
4. It should not react with moisture.
5.27 What is the difference between clutch and brake?
Clutch is used to rotate the driven member along with
driving member where as brake is used to control or stop
the moving member.
5.28 How does Geneva mechanism function?
The Geneva mechanism consists a Geneva wheel
having radial slots and a crank. The crank has a pin which
enters into a radial slot and causes the Geneva wheel to
turn through a portion of revolution. When the pin leaves
the slot, the Geneva wheel remains stationary until the pin
enters the next slot. This way the continuous motion of the
crank is converted into intermittent motion of the Geneva
wheel.
Two Marks Question and Answers
TM.47
5.29 List the applications of the Geneva mechanism.
The Geneva mechanism is used in rotary tables,
indexing mechanisms of turret and capstan lathes,
automatic machines, watches, motion-picture projectors, etc.
5.30 What is the requirement to obtain a smooth
motion from a Geneva wheel?
The slot in the Geneva wheel must be tangential to
the path of the pin upon engagement in order to reduce
shock during engagement. In other words, the centre lines
of slot and crank must mutually be perpendicular at the
engagement and at the disengagement.
5.31 State a few applications of ratchet and pawl
mechanism.
Shaping machine table movement
Planing machine
Hoisting machine
Bearing machine
Some types of screw jack.
5.32 What
do
Mechanism’
you
understand
by
‘Geneva
In machine tools, the mechanism used in rotary tables
and indexing turrets is known as Geneva mechanism.
Geneva mechanism consists of a Geneva Wheel with a no.
of slots and a driving disc (Crank) whose projected pin
enters the slot and causes the intermittent rotation of the
Geneva Wheel.
TM.48
Design of Transmission Systems
5.33 What is an intermittent mechanism?
It is a mechanism that consists a sequence of motions
and dwells. A dwell is a periods in which the output link
or links remains stationary while the input link continues
to move. The intermittent motions may be circular,
reciprocating or oscillating.
5.34 How ratchet and pawl mechanism works?
In a ratchet and pawl mechanism, the arm pivots
about the centre of the toothed ratchet wheel and is moved
back and forth to index the wheel. The driving pawl rotates
the ratchet wheel in one direction and does no work on the
return trip. The locking pawl prevents the ratchet from
reversing direction, while the driving pawl returns. Both
pawls are usually spring loaded.
5.35 What is the function of pawl in the ratchet and
pawl mechanism?
Pawl is the machine member used to interrupt the
further rotation of the driver (ratchet), by engaging in the
ratchet tooth. The pawl may be activated by its own weight
or by a spring. When the direction of rotation is reversed
the pawl gets disengaged and there is no interference of
driver motion. One or more pawls are used in a ratchet
mechanism.
1
Design of Transmission Systems
Index
B
Based on Hertz Method, 3.64,
3.192
Basic Curves, 5.6
Bevel Reducer, 4.212
Bevel Gear Nomenclature, 3.4
Brake friction materials, 5.83
Brakes, 5.83
Bush chain, 1.120
C
Cam Profile Layout, 5.31
Differential Band brake, 5.99
Double shoe brake, 5.113
Dynamic Effects (Dynamic
Tooth Load), 2.19
E
Efficiency of Worm Gearing,
3.157
Electromagnetic clutch, 5.80
F
Factor of Safety, 2.25
Cam, 5.1
Failures of wire rope, 1.97
Centrifugal Clutches, 5.78
Fatigue Strength of Gear, 2.21
Chain, 1.120
Flat belts, 1.2
Chain Drives, 1.118
Flat Belt Drives, 1.3
Chain housing, 1.122
Fluid coupling, 4.212
Circular belts, 1.3
Fluid fly wheel, 4.212
Clutches, 5.47
Follower, 5.1
Cone Clutch, 5.69
Force Determination, 5.36
Constant Mesh Gear Box, 4.208
Friction Materials, 5.137
Contact Stress, 5.35
Crossed Helical Gears, 3.214
D
Design of chain drive, 1.118
Design of V-Belt Drive, 1.45
Design of Wire Ropes, 1.91
Design of Gear Box, 4.129
Design of Spur Gear, 2.77
G
Gear Tooth Failures, 2.6
Gear Box, 4.1
Gear Materials, 2.26
Geneva Mechanism , 5.138
Geometric progression, 4.6
H
Design of V-Belts, 1.47
Helical Gears, 2.123
Design of Worm, 3.192, 3.153
Helical Reducer, 4.212
Designing CAM, 5.29
Hertz Method, 2.77
Index
I
Single Block Shoe Brake, 5.84
Internal Expanding Brake, 5.120
Slack adjuster, 1.122
Inverted chains, 1.120
Speed Diagram, 4.4
K
Kinematic Layout, 4.13
L
Law of Gearing, 2.7
M
Metallic materials, 2.26
N
Nomenclature of a Cam-Drive,
5.4
Non-metallic materials, 2.26
Normal Pressure Angle n,
2.129
Number of Teeth, 2.10
P
Plate clutch, 5.50
Pressure angle , 2.129, 5.31
R
Ratchet and Pawl Mechanism,
5.147
Ray Diagram, 4.4
Roller chain, 1.120
S
2
Speed Reducer Unit, 4.211
Speed Ratio, 2.10
Sprockets, 1.121
Standard step ratio, 4.6
Strength of Bevel Gears, 3.7
Structural Formula, 4.11
T
Tooth Stress, 3.7
Tooth Stresses (The Lewis
Bending Equation), 2.14
Toothed belt, 1.3
Torque Convertor, 4.215
Torque Converter Gear Box,
4.215
Transverse Pressure Angle t,
2.129
U
Under Cutting, 5.33
V
V - belts, 1.3
Variable Speed Gear Box, 4.212
W
Screw or Skew gears, 3.214
Wear Tooth Load, 2.21, 2.127
Sheave materials, 1.114
Wear Strength of Helical Gears,
Silent chains, 1.120
2.127
Simple band brake, 5.96
Wire Ropes, 1.91
Simple Harmonic Motion SHM,
5.16
Worm Reducer, 4.211
Worm Wheel, 3.153, 3.192