Received: 26 November 2023
Revised: 20 February 2024
Accepted: 13 March 2024
IET Control Theory & Applications
DOI: 10.1049/cth2.12659
ORIGINAL RESEARCH
Tracking control of chained non-holonomic systems with
asymmetric function constraints and external disturbance
Jing Yang
Yuqiang Wu
School of Engineering, Qufu Normal University,
Rizhao, China
Correspondence
Yuqiang Wu, School of Engineering, Qufu Normal
University, Rizhao, China.
Email: wyq@qfnu.edu.cn
Funding information
National Natural Science Foundation of China,
Grant/Award Number: 62073187
1
Abstract
For a class of chain non-holonomic systems with external disturbance and function constraints, the tan-type barrier Lyapunov function is used to solve the constraints of the
system, and then the non-linear disturbance observer is used to deal with the disturbance
so that the disturbance error eventually converges exponentially. The control strategy
designed by the backstepping method can effectively ensure that signals are bounded
without violating the respective constraints. Through the simulation design of a threestage wheeled mobile robot, the effectiveness of the control scheme is verified again by
the results.
INTRODUCTION
In recent decades, the study of non-holonomic systems research
has always been in the hot field, such as [1] introduced the
chain form of non-holonomic systems class. The problem of
robust exponential adjustment of uncertain non-holonomic
systems has been solved in [2]. For chain non-holonomic
systems, because it does not meet the famous Brockett necessary conditions [3], we mainly focus on its stability control.
Non-holonomic systems are a typical class of non-linear systems, usually used in actual physical systems, such as mobile
robots [4–6], ships [7] and unmanned aerial vehicles [8]. The
tracking problem of non-holonomic systems is an important control problem, which refers to the state tracking of
a closed-loop system for a given desired trajectory [9]. The
solution of the tracking control problem needs to use some
advanced mathematical tools and techniques, such as adaptive
control and sliding mode control. Therefore, tracking control
of non-holonomic systems has a wide range of applications
[10–12].
Disturbance has been another prominent problem in control
engineering for a long time. It is inevitable and widely exists in
many different sorts of systems. Hence, the effective realization
of disturbance rejection control scheme is an important goal of
system design [13]. Due to the need of practical application,
a variety of disturbance rejection control methods have been
proposed to deal with such problems. Effective processing can
Abbreviations: BLF, barrier Lyapunov function; SDF, state dependence function.
typically be achieved through passive disturbance rejection control [14, 15] and active disturbance rejection control [16, 17] as
well as disturbance observer [18, 19] and adaptive Kalman filter
[20].
Numerous factors, including physical constraints, security
requirements, and time limits, will have an impact on how
the system actually operates. The control system’s design and
implementation may be impacted by these constraints, so
there have been numerous research on constraints, and they
have produced some extremely important results. The processing methods mainly include model predictive control [21],
non-linear optimization control [22], control based on state
dependence function [23] and control based on BLF [24–26].
Among them, the method based on BLF can be divided into
integral-type BLF [27], log-type BLF [24, 28] and tan-type BLF
[29, 30]. These methods can simultaneously handle scenarios
that are time-varying, time-invariant, symmetric and asymmetric. Therefore, it is a powerful tool to deal with constraints, with
higher application value and wider use.
Here, a tan-type barrier Lyapunov functions is introduced
for a class of chained non-holonomic systems with external
disturbance, which is suitable for time-varying asymmetric function constraints. It is demonstrated that the suggested control
method can not only guarantee the finite-time convergence of
the x0e subsystem but also realize the uniformly bounded of the
remaining system under the influence of the finite-time stability
of some subsystems. At the same time, it is confirmed that neither of the two constraints, g0 (x0e ) nor g1 (x1e ), has been violated.
The following are this paper’s main contributions:
This is an open access article under the terms of the Creative Commons Attribution License, which permits use, distribution and reproduction in any medium, provided the original work is
properly cited.
© 2024 The Authors. IET Control Theory & Applications published by John Wiley & Sons Ltd on behalf of The Institution of Engineering and Technology.
IET Control Theory Appl. 2024;18:1223–1231.
wileyonlinelibrary.com/iet-cth
1223
(i) The majority of current chain non-holonomic systems take
state constraints and output constraints into consideration
but do not account for function constraints. Therefore, for
the first time, this paper studies the case where the function composed of the tracking error is constrained, and the
designed controller can ensure that signals do not violate
the constraint.
(ii) Here, a tan-type BLF and non-linear disturbance observer
are introduced considering the function mixing constraint
for the output signal. This method can be applied to both
constrained and unconstrained situations. At the same time,
in a practical example, the simulation demonstrates that
the control scheme has provided good trajectory tracking
control performance.
For systems with errors or disturbances, analysis and design
are more difficult in systems with universal existence. In recent
years, an increasing number of studies have been conducted on
these two systems, but there are some problems that force us to
look for other solutions.
2.2
Problem formulation
This paper describes the chain non-holonomic system as:
ẋ 0 = u0
ẋ 1 = x2 u0
⋯
2
2.1
ẋ n = u1 + d
MATHEMATICAL PRELIMINARIES
y = [x0 , x1 ]T ,
Kinematics model
In recent years, in the research and design of non-holonomic
systems, a relatively common wheeled mobile machine has been
in the popular field and has been widely studied. Considering
that there are some disturbances in the real situation, reference [31] proposed the following model considering the small
measurement error of the angle:
with x1 , … , xn , y represent the state and output, respectively,
where u0 , u1 ∈ R are the control inputs, and d is the external
disturbance. Suppose the desired trajectory x1d , x2d , … , xnd is
as follows:
ẋ 0d = u0d
ẋ 1d = x2d u0d
ẋ a = va cos(𝜃a + 𝜀)
⋯
ẏ a = va sin(𝜃a + 𝜀)
𝜃̇ a = 𝜔a ,
ẋ a = (va + d )cos𝜃a
(2)
with d representing the external disturbance. By defining
x1 = 𝜃, x2 = xa sin𝜃 − ya cos𝜃, x3 = xa cos𝜃 + ya sin𝜃,
(3)
It is possible to generate the following non-holonomic system
from system (2)
ẋ 0 = u0
ẋ 1 = x2 u0
ẋ 1 = u1 + d .
(4)
(6)
For later convenience, the tracking error can be expressed as:
ẋ 0e = u0 − u0d
ẋ 1e = x2e u0d + x2 (u0 − u0d )
⋯
ẋ ne = u1 − u1d + d .
ẏ a = (va + d )sin𝜃a
u0 = 𝜔, u1 = v − x1 u0 .
ẋ nd = u1d .
(1)
where (xa , ya ) is the position of the centre of mass on the plane,
𝜃a is the forward angle of the robot, va is the forward velocity,
and 𝜔a is the angular velocity of the robot, and 𝜀 is a small bias
in orientation. The kinematic model with disturbance is likewise
presented as follows in reference [32]:
𝜃̇ a = 𝜔a
(5)
(7)
The constraints are −ki1 (t ) < gi (xie ) < ki2 (t ), where
ki1 (t ), ki2 (t ), i = 0, 1 are time-varying functions, gi (xie ) are
functions of xie , i = 0, 1, respectively. Take into account the
wheeled mobile robot as an example of the aforementioned
constraints. This type of robot has some special constraints,
which prevent them from moving freely in all directions. Compound variables can help us integrate multiple factors or inputs
into a single variable, allowing us to understand and deal with
complex problems more effectively. Therefore, such constraints
can be used to describe the dynamic properties of the system,
and can also help us design and optimize control strategies. For
instance, the robot might require to avoid driving into obstacles
in a complicated environment. By constraining the composite
variables, the robot can be assisted in moving as efficiently as
possible under the condition of satisfying the position error,
velocity error and their combination error.
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
1224
1225
Remark 1. Due to the fact that xie = xi − xid , where xid is the
known default value. The constraint on the function g(x) of the
initial x system can be achieved by g(xie ) of the transformed
xie system, where g(xie ) is a function with respect to xie . Such
method is widely used in non-holonomic tracking systems, such
as [32].
Then, the time derivative of V0 is given by
𝜕V0
𝜕V0
ġ 0 (x0e )ẋ 0e +
k̇ (t )
𝜕g0 (x0e )
𝜕k0 (t ) 0
)
( 2
𝜋g0 (x0e )
𝜕g0 (x0e )
2
= g0 (x0e )
ẋ sec
𝜕x0e 0e
2k20 (t )
( 2
)
𝜋g0 (x0e )
2k0 (t )k̇ 0 (t )
+
tan
𝜋
2k2 (t )
V̇ 0 =
Assumption 1. Suppose that the derivatives of functions
g0 (x0e ) and g1 (x1e ) with respect to x0e and x1e have, respectively,
𝜕g0 (x0e )
𝜕g (x )
≠ 0 and 1 1e ≠ 0. And g0 (0) = 0, g1 (0) = 0.
𝜕x0e
𝜕x1e
(
g2 (x0e )k̇ 0 (t ) 2 𝜋g02 (x0e )
− 0
sec
k0 (t )
2k20 (t )
Assumption 2. There exist ki1 , ki2 , Ki1 , Ki2 , i = 0, 1 that
belong to positive constants, such that ki1 ≤ ki1 (t ), ki2 ≤ ki2 (t ),
|k̇ i1 (t )| ≤ Ki1 and |k̇ i2 (t )| ≤ Ki2 .
Assumption 4. Assuming d satisfies
𝜉̇ = A𝜉,
When taking the derivative of the time-varying BLF V0 , the
derivative with respect to time t is already included in the
𝜕V0
k̇ 0 (t ) term. A similar approach can be seen in time-varying
where A and C are vectors of n × n and n × 1, respectively,
𝜁 ∈ Rn , d ∈ R, is a continuously exerting disturbance.
𝜕k0 (t )
constraints [30]. Define Φ0 as
( 2
)
⎧
𝜋g0 (x0e )
2
, g0 (x0e ) > 0,
⎪Φ02 = sec
2k202 (t )
⎪
⎪
( 2
)
Φ0 = ⎨
⎪Φ01 = sec2 𝜋g0 (x0e ) , g0 (x0e ) ≤ 0.
2k201 (t )
⎪
⎪
⎩
Lemma 1. For any 𝜆 ∈ [0, 1), the following inequality holds:
𝜋𝜆
tan
2
3
3.1
)
(
≤
) ( ) ( ) ( )
𝜋𝜆
𝜋𝜆
𝜋𝜆
𝜋𝜆
sec
≤
sec 2
.
2
2
2
2
(8)
CONTROL DESIGNS
Firstly, take into account the x0e subsystem, then combine the
constraints −k01 (t ) < g0 (x0e ) < k02 (t ) and select a potential
BLF as:
( 2
)
𝜋g0 (x0e )
k20 (t )
tan
,
(9)
V0 =
𝜋
2k2 (t )
0
where k0 (t ) = k02 (t ), if g0 (x0e ) > 0, otherwise k0 (t ) = k01 (t ).
Remark 2. When the system has no state constraints, this means
that k0 (t ) → ∞. Employing L’Hospital rule, we get
𝜋g02 (x0e )
k20 (t )
tan
k0 (t )→∞ 𝜋
2k20 (t )
lim
(12)
The derivative of V0 can be reduced to
Stabilization analysis of x0e subsystem
(
(11)
0
d = C 𝜉,
(
)
)
( 2
(x
)
𝜋g
𝜕g0 (x0e )
0e
0
≤ g0 (x0e )
(u0 − u0d )sec 2
𝜕x0e
2k20 (t )
)
(
2g02 (x0e )|k̇ 0 (t )| 2 𝜋g02 (x0e )
+
sec
.
k0 (t )
2k2 (t )
Assumption 3. For u0d , it further assumes that u0d > Δ, it
is easy to verify that u0 (t ) > 0 for any t ≥ 0. The Δ will be
presented in the design of later.
{
0
)
1
= g02 (x0e ).
2
(10)
As a result, if there are no state constraints, the BLF may be
replaced by quadratic ones. In this case, the analysis procedure
is identical to the case without constraint requirements.
V̇ 0 ≤ g0 (x0e )
𝜕g0 (x0e )
(u0 − u0d )Φ0 + 𝜅0 g02 (x0e )Φ0 ,
𝜕x0e
(13)
where
𝜅0 ≥
2𝜍0
𝜒0
,
with
𝜍0 = max{K01 , K02 }
and
𝜒0 =
,
(14)
min{k01 , k02 }, the control signal u0 is designed as
u0 = u0d −
𝜇sig2a−1 (g0 (x0e ))
𝜕g0 (x0e )
−
𝜅0 g0 (x0e )
𝜕x0e
𝜕g0 (x0e )
𝜕x0e
then we have
V̇ 0 ≤ −𝜇|g0 (x0e )|2a Φ0 ,
(15)
where 𝜇 > 0, 0 < 2a{− 1 < 2, and siga (X ) =}
|X |a sign(X ),
and choose Δ = max
𝜇sig2a−1 (g0 (x0e ))
𝜕g0 (x0e )
𝜕x0e
𝜅 g (x )
+ 𝜕g0 00(x0e0e)
𝜕x0e
. Noting the
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
fact that 0 ≤
𝜋g02 (x0e )
≤
2k20 (t )
𝜋
2
⋯
and Φ0 ≥ 1, and by the action of
ẋ ne = u1 − u1d + d ,
Lemma 1, we have the following inference
( 2
( 2
))a
k
𝜋g
(t
)
(x
)
0e
0
0
V0a ≤
tan
𝜋
2k2 (t )
with the constraints −k11 (t ) < g1 (x1e ) < k12 (t ). For the system
(19), which can be reduced to ẋ e = f (xe ) + h1 u1 + h2 d , a nonlinear disturbance observer is introduced to solve the external
disturbance
0
(
))a
𝜋g02 (x0e )
1 2
2
g (x )sec
≤
2 0 0e
2k20 (t )
)
( 2
𝜋g0 (x0e )
2a
2
≤ 𝜀|g0 (x0e )| sec
,
2k20 (t )
(
𝜙̇ = (A − lh2C )𝜙 + Ap − l (h2Cp + f + h1 u1 )
𝜁ˆ = p + 𝜙
1
(
𝜋g02 (x0e )
2k20 (t )
ˆ
d̂ = C 𝜁,
(16)
with 𝜀 = ( )𝛼 . Through simply combining and processing (15)
2
and (16), we obtain
V̇ 0 + 𝛾V0a ≤ −(𝜇 − 𝛾𝜀)|g0 (x0e )|2a sec 2
)
≤ 0,
(17)
T (g0 (x0e (0))) ≤
𝛾(1 − a)
.
z1 = g1 (x1e )
as t1 ≥
V01−a (g0 (x0e (0)))
𝛾(1−a)
.
Proposition 1. Considering the one-order x0e subsystem, the control law
(14) can guarantee convergence to zero within a certain amount of time t1 .
In the meantime, the state x0e remains subject to the function that is needed
constraints −k01 (t ) < g0 (x0e ) < k02 (t ).
Proof. The proof process refers to [32]. It can be seen from
(15) that V̇ 0 ≤ 0, thus V0 (t ) ≤ V0 (0). We substitute in (10)
𝜋g2 (x )
and simplify both sides of this equation, we obtain 0 2 0e ≤
2k0 (t )
(
)
𝜋V0 (0)
𝜋
arctan
< , that is, |g0 (x0e (t ))| < k0 (t ), −k01 (t ) <
2
k0 (t )
2
g0 (x0e (t )) < k02 (t ).
□
3.2
Tracking control of x1e , … , xne
subsystem for t ≥ t1
Since u0 − u0d = 0 when t ≥ t1 , the system of x1e , … , xne can be
transformed into the form below
ẋ 1e = x2e u0d
ẋ 2e = x3e u0d
z2 = x2e − 𝛼1
⋯
zn = xne − 𝛼n−1 .
(18)
As a result, it is possible to estimate the relay switching time t1
(20)
where d̂ represents the estimation of the disturbance, 𝜙 is
the internal state of the non-linear observer and l denotes
the observer gain to be designed, and h1 = [0, … , 0, 1]T , h2 =
[0, … , 0, 1]T , f = [x2e u0d , x3e u0d , … , xne u0d , −u1d ]T , p is a nonlinear vector-valued function to be designed. The estimation
error is defined as d̃ = d − d̂ .
For the sake of subsequent design, make the following
changes
where 𝜇 − 𝛾𝜀 > 0 is satisfied by selecting the positive constants
𝜇 and 𝛾. According to (17) and the finite-time stability theory,
we also get the settling time T (x0e (0))
V01−a (g0 (x0e (0)))
(19)
(21)
Now, the design process of the controller is given.
Step 1: Select the BLF resembling (10), and take its derivative
to obtain
(
)
𝜋z12
k21 (t )
V1 =
tan
,
(22)
𝜋
2k2 (t )
1
where k1 (t ) = k12 (t ), if z1 > 0, otherwise k1 (t ) = k11 (t ). Then,
the time derivative of V1 is given by
)
)
(
(
2
2 ̇
2
2z
𝜋z
𝜋z
|
k
(t
)|
𝜕z1
1
1
1
1
ẋ sec 2
sec 2
V̇ 1 ≤ z1
+
k1 (t )
𝜕x1e 1e
2k21 (t )
2k21 (t )
)
(
2
𝜋z
𝜕z1
1
≤ z1
(z + 𝛼1 )u0d sec 2
𝜕x1e 2
2k2 (t )
(
+
2z12 |k̇ 1 (t )| 2 𝜋z12
sec
k1 (t )
2k21 (t )
)
1
(23)
Define Φ1 as
)
(
2
⎧
𝜋z
1
, z1 > 0,
⎪Φ12 = sec2
2k212 (t )
⎪
)
(
Φ1 = ⎨
𝜋z12
⎪
2
, z1 ≤ 0.
⎪Φ11 = sec
2k211 (t )
⎩
(24)
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
1226
1227
Therefore,
then
V̇ 1 ≤ z1
𝜕z1
(z + 𝛼1 )u0d Φ1 + 𝜅z12 Φ1 ,
𝜕x1e 2
(25)
V̇ n ≤ −𝛽1 z12 Φ1
−
∑n−1
2
j =2 𝛽 j z j + zn−1 zn u0d
+zn (u1 − u1d + d̂ + d̃ − 𝛼̇ n−1 )
(35)
2𝜍
where 𝜅 ≥ , with 𝜍 = max{K11 , K12 } and 𝜒 = min{k11 , k12 }.
𝜒
The first virtual controller 𝛼1 are chosen as
1
1 𝛽1
− 𝜕z
z1 ,
1 u0d
1 u0d
1
𝛼1 = −𝜅z1 𝜕z
𝜕x1e
(26)
𝜕x1e
zn d̃ ≤ 𝜆zn2 +
𝜕z1
u Φ .
𝜕x1e 0d 1
u1 = u1d − zn−1 u0d + 𝛼̇ n−1 − d̂ − 𝛽n zn − 𝜆zn .
2
𝜕z1
u Φ + z2 z3 u0d + z2 𝛼2 u0d − z2 𝛼̇ 1 .
𝜕x1e 0d 1
(28)
Design
𝜕z1
𝛽
1
𝛼̇ − 2 z
Φ +
𝜕x1e 1 u0d 1 u0d 2
(29)
with 𝛽2 > 0, then the derivative can be expressed as
V̇ 2 ≤ −𝛽1 z12 Φ1 − 𝛽2 z22 + z2 z3 u0d .
(30)
1
Step i (3 ≤ i < n): Set Vi = Vi−1 + zi2 and calculate its
2
derivative
V̇ i ≤ −𝛽1 z12 Φ1 −
i−1
∑
j =2
𝛽 j z 2j + zi−1 zi u0d
+ zi zi+1 u0d − zi 𝛼̇ i−1 + zi u0d 𝛼i
𝛽
1
𝛼̇
− i z − zi−1
u0d i−1 u0d i
i
∑
j =2
𝛽 j z 2j + zi zi+1 u0d .
j =2
1 2
d̃
4𝜆
𝛽 j z 2j +
≤ −𝜚Vn + 𝜖,
(38)
1
where 𝜚 = min{2𝛽i , i = 1, … , n} and 𝜖 = d̃ 2 . Integrating both
4𝜆
sides of (38), we get
𝜖
𝜖
Vn (t ) ≤ e−𝜚t Vn (0) + (1 − e−𝜚t ) ≤ Vn (0) + .
𝜚
𝜚
(39)
Proposition 2. Via the system (19) and the control law (37), we can
guarantee that the system is asymptotically stable, and by designing l , we
can ensure the global exponential convergence of the estimation error d̃ .
Then, the function g1 (x1e ) also converges to zero, and x1e converges to
zero, x2e , … , xne will reach zero asymptotically. Additionally, the function
constraints can be satisfied when the appropriate parameter is selected, that
is, −k11 (t ) < g1 (x1e ) < k12 (t ), t ≥ t1 .
(
)
𝜋z12
k21 (t )
𝜖
V1 =
tan
≤ Vn (t ) ≤ Vn (0) +
2
𝜋
𝜚
2k1 (t )
(32)
⎛ (Vn (0) + )𝜋 ⎞
𝜚
⎟ < 𝜋.
⎜
≤
arctan
2
2
⎟ 2
⎜
2k1 (t )
k1 (t )
⎠
⎝
(33)
1
Step n: Take Vn = Vn−1 + zn2 ,
2
V̇ n ≤ V̇ n−1 + zn (u1 − u1d + d − 𝛼̇ n−1 )
n
∑
(31)
with 𝛽i > 0, then
V̇ i ≤ −𝛽1 z12 Φ1 −
V̇ n ≤ −𝛽1 z12 Φ1 −
Proof. According to (22) and (39), we get
The virtual controller can be designed as
𝛼i =
(37)
We can eventually conclude that
1
𝛼2 = −z1
(36)
(27)
Step 2: It follows from V2 = V1 + z22 that its derivative is
V̇ 2 ≤ −𝛽1 z12 Φ1 + z1 z2
1 2
d̃ ,
4𝜆
where 𝜆 > 0, then the controller and the adaptive law are
designed as
with 𝛽1 > 0, then
V̇ 1 ≤ −𝛽1 z12 Φ1 + z1 z2
Given by Young’s inequality
(34)
𝜖
𝜋z12
(40)
If not, then there a finite moment t1 such that |z1 (t1 )| = k1 (t1 )
since |z1 (0)| ≤ k1 (0) and z1 (t ) is continuous. This together with
(40) leads to
(
)
𝜋z12
k21 (t )
tan
+∞ = V1 =
≤ Vn (t ) ≤ Vn (0)
𝜋
2k21 (t )
+
𝜖
< +∞.
𝜚
(41)
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
By the method of contradiction, we know that |z1 | < k1 (t ), that
is, to say |g1 (x1e )| < k1 (t ), −k11 (t ) < g1 (x1e ) < k12 (t ).
Referring to [33, 34], from the non-linear observer gain l =
𝜕p
, under the Assumption 4, it can be proved that
According to the backstepping design method in Section 3.2,
the same disturbance observer treatment is applied to the
disturbance, and we can calculate
𝜕xe
𝛼2 = −z1
𝜕p
̇
𝜁̇ − 𝜁ˆ = A𝜁 − 𝜙̇ −
ẋ
𝜕xe e
𝛼i =
= A𝜁 − A𝜙 + lh2C 𝜙 − Ap + l (h2Cp + f + h1 u1 )
𝜕p
−
( f + h1 u1 + h 2 d )
𝜕xe
ˆ + lh2 d̂ − lh2 d
= A(𝜁 − 𝜁)
ˆ
= (A − lh2C )(𝜁 − 𝜁).
(42)
According to the above equation, it can be known that 𝜁ˆ can be
exponentially approximate 𝜁 by choosing an appropriate paramˆ it can be
eter l . From the linear change of d = C 𝜁 and d̂ = C 𝜁,
seen that d̃ also satisfies the above result, that is, d̂ exponential type is close to d . Then the appropriate choice of parameter
A, l , can make V̇ n ≤ −𝜚Vn , further can get g1 (x1e ) → 0. In this
case, it follows from Assumption 1 that x1e → 0. It can be seen
from (21) and the designed virtual controller by recursion that
□
x2e , … , xne are also asymptotically converges to zero.
3.2.1
Tracking control of x1e , … , xne subsystem
for [0, t1 ]
The state of the system (7) is considered not to escape to infinity
within the time span [0, t1 ] in the following. For the convenience
of subsequent derivation, system (7) can be written as:
ẋ 1e = x2e u0 + x2d (u0 − u0d )
⋯
ẋ ne = u1 − u1d + d .
(43)
Choose the same BLF V1 . The derivative of V1 can be expressed
as:
V̇ 1 ≤ z1
𝜕z1
((z + 𝛼1 )u0 + x2d (u0 − u0d ))Φ1 + 𝜅z12 Φ1 .
𝜕x1e 2
(44)
The first virtual controller is obtained by using Young’s
inequality
𝛼1 = −𝜅z1
1 𝛽1
1
1 1
−
z − x2d (u0 − u0d ).
𝜕z1 u0 1
u0
u0
𝜕z1
𝜕x1e
𝜕x1e
(45)
𝛽
1
1
𝛼̇
− i z − zi−1 − x(i+1)d (u0 − u0d )
u0 i−1 u0 i
u0
u1 = u1d − zn−1 u0 + 𝛼̇ n−1 − d̂ − 𝛽n zn − 𝜆zn .
(46)
Proposition 3. Considering the system (43) and the control law (46),
we can guarantee that the function g1 (x1e ) does not escape into infinity,
and satisfies the constraints −k11 (t ) < g1 (x1e ) < k12 (t ) at the time
interval [0, t1 ], second, we can adjust t1 to accomplish the objective in
subsequent research.
Proof. Proof method is similar to Proposition 2; therefore,
omitted here to prove that to avoid repetition.
□
Remark 3. Different from the simple output or state constraints
of [25, 28], the constraints considered here are function constraints on outputs, which have wider application scope and
stronger usability.
Theorem 1. Given the system (7), if controller u0 is designed by (14)
and controller u1 is designed by (46) of 0 ≤ t ≤ t1 and (37) of t ≥ t1 ,
and the initial values are within the given constraints, then the following
conclusions can be attained:
(i) the gi (xie ), i = 0, 1 satisfy the given constraints at any given time.
(ii) all signals of the closed-loop system are bounded.
j=
(iii) limt →∞ gi (xie ) = 0, i = 0, 1, limt →∞ x je → 0,
0, 1, … , n.
4
ẋ 2e = x3e u0 + x3d (u0 − u0d )
𝜕z1
𝛽
1
1
Φ + 𝛼̇ − 2 z − x (u − u0d )
𝜕x1e 1 u0 1 u0 2 u0 3d 0
SIMULATION EXAMPLE
A wheeled mobile robot is used to illustrate and verify the effectiveness of the proposed control scheme, and the system can be
as:
ẋ a = (va + d )cos𝜃a
ẏ a = (va + d )sin𝜃a
𝜃̇ a = 𝜔a ,
(47)
where (xa , ya ) is the coordinate of the robot mass centre, 𝜃a
denotes the heading angle, va and 𝜔a are the forward linear
velocity and the angular velocity, respectively, and d stands for
the external disturbance. After a simple transformation, system
(47) can be converted to
ẋ 0 = u0
ẋ 1 = x2 u0
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
1228
1229
ẋ 2 = u1 + d .
(48)
1
0.5
Then, the tracking errors system is given by
0
-0.5
ẋ 0e = u0 − u0d
-1
ẋ 1e = x2e u0d + x2 (u0 − u0d )
-1.5
-2
ẋ 2e = u1 − u1d + d .
(49)
The constraints of the above system are −ki1 (t ) < gi (xie ) <
ki2 (t ), i = 0, 1, where k01 (t ) = e−t + 0.2, k02 (t ) = e−0.5t + 0.4,
3
+
k11 (t ) = sin(t ) + 1.2, k12 (t ) = sin(0.5t ) + 1.8, g0 (x0e ) = 3x0e
3
2x0e and g1 (x1e ) = 2x1e + 3x1e . The disturbance is selected as
d = 1 + 2sin(2t ). For this example, the controller is selected as:
u0 = u0d −
𝜇sign(g0 (x0e ))|g0 (x0e )|2a−1
𝜕g0 (x0e )
𝜕x0e
−
𝜅0 g0 (x0e )
-3
-3.5
0
10
20
30
40
50
40
50
40
50
Time(s)
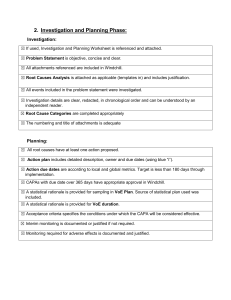
FIGURE 1
Tracking errors x0e , x1e , and x2e .
2
𝜕g0 (x0e )
1
𝜕x0e
⎧
𝜅g1 (x1e )
𝛽1 g1 (x1e )
1
⎪𝛼12 = −
−
− x2d (u0 − u0d ),
u0
𝜕g1 (x1e )
𝜕g1 (x1e )
⎪
u0
u0
⎪
𝜕x1e
𝜕x1e
⎪
𝛼 1 = ⎨ 0 ≤ t ≤ t1 ,
⎪
𝜅g1 (x1e )
𝛽1 g1 (x1e )
−
, t ≥ t1 .
⎪𝛼11 = −
𝜕g1 (x1e )
𝜕g1 (x1e )
⎪
u0d
u0d
⎪
𝜕x1e
𝜕x1e
⎩
⎧
𝜕g1 (x1e )
⎪u12 = u1d − g1 (x1e )
u Φ + 𝛼̇ 1 − d̂ − (𝛽2 + 𝜆)
𝜕x1e 0 1
⎪
⎪ (x2e − 𝛼1 ), 0 ≤ t ≤ t1 ,
u1 = ⎨
𝜕g (x )
⎪u11 = u1d − g1 (x1e ) 1 1e u0d Φ1 + 𝛼̇ 1 − d̂ − (𝛽2 + 𝜆)
⎪
𝜕x1e
⎪ (x2e − 𝛼1 ), t ≥ t1 .
⎩
(50)
The calculation shows that 𝜅0 = 0, 𝜅 = 10, where d̂ can be
obtained from the following equation:
𝜙̇ = (A − lh2C )𝜙 + Ap − l (h2Cp + f + h1 u1 )
𝜁ˆ = p + 𝜙
ˆ
d̂ = C 𝜁.
-2.5
(51)
For [0, t1 ], its coefficient matrix is taken h1 = h2 =
[0, 1]T , f = [x2e u0d + x2 (u0 − u0d ), −u1d ]T and for t ≥ t1 , the
coefficient matrix is h1 = h2 = [0, 1]T , f = [x2e u0d , −u1d ]T . To
meet the[ requirements
of the Assumption 4, A, C is taken
]
0 2
as A =
, C = [1, 0] and l = [1, 150]T . At this point,
−2 0
[
]
−1 2
.
the matrix A − lh2C can be calculated A − lh2C =
−152 0
By using the criterion, |𝜆I − (A − lh2C )|, it is obtained that
0
-1
0
10
20
30
Time(s)
2
1
0
-1
-2
0
10
20
30
Time(s)
FIGURE 2
The function g0 (x0e ), g1 (x1e ) and its constraints.
A − lh2C is the Hurwitz matrix, then the error dynamics of the
non-linear disturbance observer is asymptotically stable.
The relevant parameters are selected as 𝜇 = 0.8, a = 1.1,
𝛽1 = 1, 𝛽2 = 5 and 𝜆 = 10. The reference control inputs
are selected as u0d = 0.2 and u1d = e−t + 1. The initial conditions are selected as [x0 (0), x1 (0), x2 (0)]T = [0.2, 1.2, 0.4]T ,
[x0d (0), x1d (0), x2d (0)]T = [0.6, 0.8, 0.4]T , and 𝜙(0) = [0, 0],
and it is known from the calculation that the given initial conditions are within the constraint. The simulation results are shown
in Figures 1–4.
As can be seen from Figure 1, the tracking errors xie , i =
0, 1, 2 are asymptotically stable and converge quickly, converging to zero in 5,1, and 12 s, respectively. Figure 2 shows that
the functions g0 (x0e ), g1 (x1e ) with respect to x0e and x1e converge exponentially and do not violate the given constraints.
Compared with other pure output/state constraints, the function constraints here can be used in a variety of forms to deal
with more complex situations and have a wider range of applications. Figure 3 shows that the control inputs u0 and u1 of the
system are bounded, and u0 tends to be stable after a period
of time. The disturbance observer in Figure 4 can estimate the
disturbance quickly; that is, the disturbance error quickly con-
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
AUTHOR CONTRIBUTIONS
Jing Yang: Conceptualization; writing—original draft;
writing—review and editing. Yuqiang Wu: Conceptualization;
funding acquisition; supervision.
0.5
0.4
0.3
0.2
0.1
0
10
20
30
40
50
Time(s)
50
0
ACKNOWLEDGEMENTS
This study was funded by the National Natural Science
Foundation of China (62073187).
CONFLICT OF INTEREST STATEMENT
The authors declare no potential conflict of interests.
-50
-100
-150
-200
0
10
20
30
40
50
Time(s)
FIGURE 3
ORCID
Jing Yang https://orcid.org/0000-0002-3295-4154
Trajectory of control inputs u0 and u1 .
REFERENCES
6
4
2
0
-2
-4
0
10
20
30
40
50
Time(s)
FIGURE 4
Disturbance and its estimation.
verges to zero. On the whole, the designed controllers are more
effective in convergence speed and satisfying constraints.
5
DATA AVAILABILITY STATEMENT
The data that support the findings of this study are available
from the corresponding author upon reasonable request.
CONCLUSIONS
To deal with time-varying function constraints on nonholonomic systems, this paper proposes BLF method: the tantype BLF approach. A controller that satisfies the constraints
is designed by backstepping and using Young’s inequality. The
findings demonstrate that the proposed control scheme not
only maintains g0 (x0e ) and g1 (x1e ) within the constrained ranges,
but also ensures the stability of the x0e subsystem in finite-time
as well as the asymptotic stability of the rest system. However, there are some issues to consider. For example, consider
whether the assumption about g0 (x0e ) and g1 (x1e ) in the constraints may be removed for the more general situation of
system constraints. Another example is how to design the controller to achieve the purpose when the constraint is a mixed
constraint g(x, u) < 0.
1. Murray, R.M., Sastry, S.: Nonholonomic motion planning: steering using
sinusoids. IEEE Trans. Autom. Control 38(5), 700–716 (1993)
2. Jiang, Z.P.: Robust exponential regulation of nonholonomic systems with
uncertainties. Automatica 36(2), 189–209 (2000)
3. Brockett, R.W., Millman, R.S., Sussmann, H.J.: Differential Geometric
Control Theory. Birkauser, Boston, MA (1983)
4. Park, S., Lee, S.M.: Formation reconfiguration control with collision avoidance of nonholonomic mobile robots. IEEE Rob. Autom. Lett. 8(12),
7905–7912 (2023).
5. Nascimento, T.P., Dórea, C.E., Gonçalves, L.M.G.: Nonholonomic mobile
robots’ trajectory tracking model predictive control: a survey. Robotica
36(5), 676–696 (2018)
6. Dai, S.L., He, S., Chen, X., Jin, X.: Adaptive leader–follower formation
control of nonholonomic mobile robots with prescribed transient and
steady-state performance. IEEE Trans. Industr. Inform. 16(6), 3662–3671
(2019)
7. Yang, H., Deng, F., He, Y., Jiao, D., Han, Z.: Robust nonlinear model predictive control for reference tracking of dynamic positioning ships based
on nonlinear disturbance observer. Ocean Eng. 215, 107885 (2020)
8. Baca, T., Stepan, P., Spurny, V., Hert, D., Penicka, R., Saska, M., Kumar, V.:
Autonomous landing on a moving vehicle with an unmanned aerial vehicle.
J. Field Robot. 36(5), 874–891 (2019)
9. Yang, J.M., Kim, J.H.: Sliding mode control for trajectory tracking of
nonholonomic wheeled mobile robots. IEEE Trans. Rob. Autom. 15(3),
578–587 (1999)
10. Ju, G., Wu, Y., Sun, W.: Adaptive output feedback asymptotic stabilization of nonholonomic systems with uncertainties. Nonlinear Anal. Theor.
71(11), 5106–5117 (2009)
11. Yu, J.B., Zhao, Y.: Global robust stabilization for nonholonomic systems
with dynamic uncertainties. J. Franklin Inst. 357(3), 1357–1377 (2020)
12. Rabbani, M.J., Memon, A.Y.: Trajectory tracking and stabilization of nonholonomic wheeled mobile robot using recursive integral backstepping
control. Electronics 10(16), 1992 (2021)
13. Chen, W.H.: Disturbance observer based control for nonlinear systems.
IEEE ASME Trans. Mechatron. 9(4), 706–710 (2004)
14. Hu, X.B., Chen, W.H.: Receding horizon control for aircraft arrival
sequencing and scheduling. IEEE Trans. Intell. Transp. Syst. 6(2), 189–197
(2005)
15. Lu, Q., Wang, J., Zhang, Z., Chen, G., Wang, H., Rojas, N.: An underactuated gripper based on car differentials for self-adaptive grasping with
passive disturbance rejection. In: 2021 IEEE Robotics and Automation,
pp. 2605–2611. IEEE, Piscataway, NJ (2021)
16. Feng, H., Guo, B.Z.: Active disturbance rejection control: old and new
results. Annu. Rev. Control 44, 238–248 (2017)
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU
1230
17. Fareh, R., Khadraoui, S., Abdallah, M.Y., Baziyad, M., Bettayeb, M.: Active
disturbance rejection control for robotic systems: a review. Mechatronics
80, 102671 (2021)
18. Guerrero, J., Torres, J., Creuze, V., Chemori, A.: Adaptive disturbance
observer for trajectory tracking control of underwater vehicles. Ocean Eng.
200, 107080 (2020)
19. Liu, S., Liu, Y., Wang, N.: Nonlinear disturbance observer-based backstepping finite-time sliding mode tracking control of underwater vehicles
with system uncertainties and external disturbances. Nonlinear Dyn. 88(1),
465–476 (2017)
20. Xi, Y., Li, Z., Zeng, X., Tang, X., Liu, Q., Xiao, H.: Detection of power
quality disturbances using an adaptive process noise covariance Kalman
filter. Digit. Signal Process. 76, 34–49 (2018)
21. Mayne, D.Q., Rawlings, J.B., Rao, C.V., Scokaert, P.O.: Constrained model
predictive control: stability and optimality. Automatica 36(6), 789–814
(2000)
22. Duan, J., Liu, Z., Li, S.E., Sun, Q., Jia, Z., Cheng, B.: Adaptive dynamic
programming for nonaffine nonlinear optimal control problem with state
constraints. Neurocomputing 484, 128–141 (2022)
23. Zhao, K., Song, Y.: Removing the feasibility conditions imposed on tracking control designs for state-constrained strict-feedback systems. IEEE
Trans. Automat. Contr. 64(3), 1265–1272 (2018)
24. Tee, K.P., Ge, S.S., Tay, E.H.: Barrier Lyapunov functions for the control of
output-constrained nonlinear systems. Automatica 45(4), 918–927 (2009)
25. Tee, K.P., Ge, S.S.: Control of nonlinear systems with partial state
constraints using a barrier Lyapunov function. Int. J. Control 84(12),
2008–2023 (2011)
26. Niu, B., Zhao, J.: Barrier Lyapunov functions for the output tracking control of constrained nonlinear switched systems. Syst. Control Lett. 62(10),
963–971 (2013)
27. Fu, M., Dong, L., Xu, Y., Bai, D.: A novel asymmetrical integral barrier
Lyapunov function-based trajectory tracking control for hovercraft with
multiple constraints. Ocean Eng. 263, 112132 (2022)
1231
28. Jin, X., Xu, J.X.: Iterative learning control for output-constrained systems
with both parametric and nonparametric uncertainties. Automatica 49(8),
2508–2516 (2013)
29. Yu, T., Liu, Y.J., Liu, L.: Adaptive neural control for nonlinear MIMO
function constraint systems. IEEE/CAA J. Autom. Sin. 10(3), 816–818
(2023)
30. Yao, H., Gao, F.Z., Huang, J., Wu, Y.Q.: Barrier Lyapunov functionsbased fixed-time stabilization of nonholonomic systems with unmatched
uncertainties and time-varying output constraints. Nonlinear Dyn. 99,
2835–2849 (2020)
31. Morin, P., Pomet, J.B., Samson, C.: Developments in time-varying feedback stabilization of nonlinear systems. IFAC Proc. Vol. 31(17), 565–572
(1998)
32. Zhang, S., Gao, Y., Zhang, Z., Cao, D.: SDF-based tracking control
for state-constrained nonholonomic systems with disturbances via relay
switching control: theory and experiment. Int. J. Adapt. Control 36(4),
852–869 (2022)
33. Chen, M., Chen, W.H.: Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt. Control 24(1),
51–64 (2010)
34. Li, S., Yang, J., Chen, W.H., Chen, X.: Disturbance Observer-based
Control: Methods and Applications. CRC Press, Boca Raton, FL (2014)
How to cite this article: Yang, J., Wu, Y.: Tracking
control of chained non-holonomic systems with
asymmetric function constraints and external
disturbance. IET Control Theory Appl. 18, 1223–1231
(2024). https://doi.org/10.1049/cth2.12659
17518652, 2024, 10, Downloaded from https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/cth2.12659 by Cochrane Peru, Wiley Online Library on [17/01/2025]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on Wiley Online Library for rules of use; OA articles are governed by the applicable Creative Commons License
YANG and WU