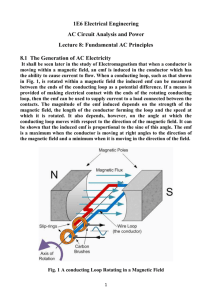
1E6 Electrical Engineering AC Circuit Analysis and Power Lecture 8: Fundamental AC Principles 8.1 The Generation of AC Electricity It shall be seen later in the study of Electromagnetism that when a conductor is moving within a magnetic field, an emf is induced in the conductor which has the ability to cause current to flow. When a conducting loop, such as that shown in Fig. 1, is rotated within a magnetic field the induced emf can be measured between the ends of the conducting loop as a potential difference. If a means is provided of making electrical contact with the ends of the rotating conducting loop, then the emf can be used to supply current to a load connected between the contacts. The magnitude of the emf induced depends on the strength of the magnetic field, the length of the conductor forming the loop and the speed at which it is rotated. It also depends, however, on the angle at which the conducting loop moves with respect to the direction of the magnetic field. It can be shown that the induced emf is proportional to the sine of this angle. The emf is a maximum when the conductor is moving at right angles to the direction of the magnetic field and a minimum when it is moving in the direction of the field. Fig. 1 A conducting Loop Rotating in a Magnetic Field 1 Consider the scenario where the magnetic field strength is constant, as for example would be established by permanent magnets. The conducting loop is of a fixed geometry so that the length of the conductor within the magnetic field is constant. If the loop is rotated at a constant speed, then the circular angle, θ as shown in Fig. 2, swept out by it per unit time changes at a constant rate, usually specified in radians per second. This means that the angle between the direction of motion of the loop and the magnetic field also changes at a constant rate. If it is considered to start at zero, it will rise to 90 O as the loop rotates through its first quadrant and then decreases back to zero (total angle relative to zero of 180O) as the loop rotates through its second quadrant. As it rotates through the third quadrant the angle will rise to 90O again, but with the arms of the loop positioned in the opposite direction in the magnetic field the polarity of the induced emf is reversed. Finally, as the loop is rotated through the fourth quadrant the angle decreases back to zero (total of 360O) again. Since all the parameters of this system are constant including the speed of rotation, then only the angle between the direction of the magnetic field and the direction of motion of the conducting loop is changing in the cyclical manner described above. The result is that the emf generated between the ends of the conducting loop varies in a cyclical manner as the sine of this angle. This means that the output voltage generated will be a sinusoidal function of time as shown in Fig. 2. Fig. 2 Generation of an Alternating Output Voltage from the Conducting Loop. In practice some mechanical means is used to rotate the conducting loop. This could be the crankshaft of the petrol engine in a portable generator, the core of the propeller of a wind turbine or the rotor driven by a water turbine placed in the flow of a river, as for example at Ardnacrusha on the Shannon. These all produce circular motion of the conducting loop so that it rotates within the magnetic field. This means that the vast majority of ac electric generators produce the sinusoidal type of voltage waveform shown in Fig. 2. 2 8.2 Phasors A phasor is a rotating vector that has fixed magnitude but phase which varies with time as shown below. The voltage produced in the generation of ac electricity as described above can be represented by a phasor. If the phasor rotates at a constant speed or frequency then the projection of its magnitude and phase onto an x-y plane results in the sinusoidal profile or waveform shown below. The horizontal x-direction may represent phase or time and the vertical y-direction represents magnitude as shown in Fig. 3. T Vm Vm θ Vθ Vθ θ Fig. 3 The Projection of a Rotating Vector onto a Vertical Axis. The output voltage of the rotating conducting loop can then be described as: Vθ VmSinθ where θ is the phase angle and Vm is the magnitude (shown as the length) of the vector. A number of characteristic properties of the sinusoidal function are of interest: Angular Frequency, ω: is the rate at which the phasor changes its rotational phase measured in radians per second (or degrees per second). Cyclic Frequency, f: is the rate at which the phasor rotates in terms of the number of complete cycles of 360 degrees it makes per second, measured in cycles per second or Hz. 1 cycle per second = 360 degrees per second = 2π radians per second Then: Vθ VmSinθ VmSin t VmSin2 ft and 2f 3 Period, T: One full cycle of the wave occupies a time T known as the period of the waveform. If the frequency of the sinewave is f then f full cycles occur in one second so that the period of one cycle is given as: 1 T f or 1 f T Peak Voltage, Vm: This is the amplitude of the sinewave or the maximum voltage attained over one full cycle of the waveform. Note that a sinusoidal voltage waveform has a positive peak and a negative peak which are equal and opposite in voltage. Peak-to-Peak Voltage, Vptp: This is the total voltage excursion of the waveform between its positive peak and its negative peak. In the case of a sinusoidal waveform it can be seen that: Vptp 2Vm Average Value, VAVE: When determining the energy or power consumed by an electric circuit we are rarely interested in this on an instantaneous basis, except for analytical purposes. We are most interested in the longer term or average power consumption over a prolonged period. This would suggest that the average value of the sinusoidal voltage waveform is of interest. However, it is clear that since the sinusoidal waveform is symmetrical about zero, having equal positive and negative excursions of the same profile then the average value is zero. However this can be formally proven: T V 1 T VAVE Vm Sint.dt m Cost 0 T0 T VAVE Vm (CosT Cos0) T But ω = 2πf and f = 1/T so that VAVE ω = 2π/T or ωT = 2π so that: Vm V (Cos 2 Cos0) m (1 1) 0 2 2 4 This verifies that the average value of a sinusoidal voltage waveform is zero. This result might incorrectly be taken to imply that the power associated with a sinusoidal voltage source is zero. However, we are well aware that the domestic electricity supply consumes power, even when connected to the simplest of resistive loads such as a light bulb or a heating element. If it is recalled that in our analysis of dc circuits the power dissipated in a resistive load, R, is given as P = V2 / R, then it is perhaps more appropriate to determine the average value of the square of the voltage waveform if power consumption is of interest. Root-Mean-Square, RMS Value, VRMS: This is the square-root of the mean of the square of the voltage waveform. In order to obtain this value it is first necessary to obtain the square of the waveform over one full cycle, then to evaluate the average or mean value of this and finally to take the square-root of the result. T T 1 Vm2 2 2 VRMS Vm Sin ωt.dt ( 1 Cos2ωt).dt T0 2T 0 T VRMS VRMS T Vm2 Vm2 1.dt Cos 2ωt.dt 2T 0 2T 0 Vm2 T Vm2 Vm2T Vm2 T t Sin 2t 0 ( Sin 4 Sin 0) 2T 0 4T 2T 4T Vm2T Vm2 Vm2T VRMS (0 0) 2T 4T 2T So that finally: VRMS Vm 2 The rms value of the sinusoidal voltage waveform is in effect the value of an equivalent fixed dc voltage source which will dissipate the same amount of power in a load as the sinusoidal voltage does when averaged over a full cycle or in the long term. Note that the value above is the value applying to a sinusoidal function only, and will be different for other types of voltage functions or waveforms. 5 8.3 The Complex Phase Plane: In Engineering, and in particular Electronic Engineering, the sinusoidal signals Sine and Cosine, i.e. Sin(ωt) and Cos(ωt), are of special importance as they are both primitive harmonic functions with one being the derivative of the other. In Engineering much analysis is concerned with rates of change and the mathematics associated with this in the Calculus. As can be seen in Fig. 4 below, these two signals have a 90 degrees phase shift with respect to each other. Vm 90o VmSinωt ω VmCos ωt VmSinωt t 0o ω VmCos ωt -90o -Vm Fig.4 Sine and Cosine Functions as Vectors In light of this, the Argand Plane is used as a Complex Phase Plane to denote components which have a ±90O phase shift with respect to each other as shown in Fig. 5. In science and engineering mathematics the j operator (rather than i as used in mathematics) has been established as a convenient means of denoting a phase shift of 90O between components or signals. This is a considerable aid in the analysis of ac circuits. j 1 Imaj +j 90o Signal Vθ Vωt ω jV(θ) V(θ) -jV(θ) Phase shifted by 90 Real ω 0o ω π V θ 90 V θ V t 2 2 -j -90o Fig. 5 Sine and Cosine Components in the Argand Plane so that: π V θ jV θ jV ωt 2 π V θ jV θ jV ωt and 2 6 In fact, a generally defined phasor or vector rotating in a plane can be broken down into two orthogonal components which have a 90O phase shift between them, i.e. two orthogonal components, as shown in Fig. 6 below. In terms of the complex plane these are referred to as the Real and Imaginary parts of the vector. Imag j Vm Real Vm Imag Vm a Vm b θ ω Vm a jb b Real a Tan θ b a -j Fig. 6 A Phasor Represented in Complex Form Then: a Re al Vm VmCos VmCos ωt jb Im ag Vm jVm Sin jVm Sin ωt By Pythagoras: Magnitude: Vm2 a 2 b 2 Vm a 2 b2 θ m Tan 1 Phase: b a In complex form the vector is specified as: V(t) Vm e jωt VmCos ωt jVm Sin ωt If a Vector is Vθ a jb then its Complex Conjugate is Vθ a jb * 7 Importance of Phasors: The importance of phasors in Electronic Engineering is that they consist of the most fundamental of electronic signals, i.e. the sinusoid or sinewave. They have an extremely useful property in terms of the analysis of electronic systems. If a sinusoidal signal at a given frequency and phase is presented at the input of a linear system, then the output signal (after initial transients have died away) is also a sinusoid at the same frequency as the input signal. The output signal will have a different magnitude and phase than the input. The change in magnitude and phase is in general different at different frequencies and it is this property that is referred to as the frequency response of the system. It can be measured in practice using signal generators which provide sinewave output signals. Vin Hω Hω Vin Vout Vout θout θi Vout Vin t t time domain A 0 T/2 T ≡ t 0 -A T frequency domain → f 3f 5f 7f 9f f f 8 3f 5f 7f 9f f