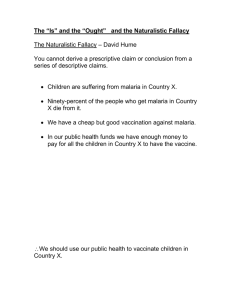
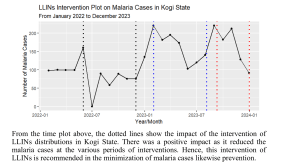
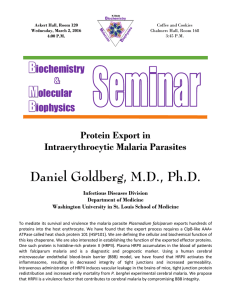
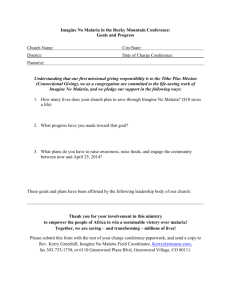
Wiley Journal of Applied Mathematics Volume 2024, Article ID 5533885, 44 pages https://doi.org/10.1155/2024/5533885 Research Article Mathematical Analysis of Malaria Epidemic: Asymptotic Stability With Cost-Effectiveness Study Sacrifice Nana-Kyere , Baba Seidu , and Kwara Nantomah Department of Mathematics, C. K. Tedam University of Technology and Applied Sciences, Navrongo, Ghana Correspondence should be addressed to Sacrifice Nana-Kyere; snanakyere.stu@cktutas.edu.gh; nana.sacrifice@vvu.edu.gh Received 27 January 2024; Revised 26 March 2024; Accepted 21 May 2024 Academic Editor: Waleed Adel Copyright © 2024 Sacrifice Nana-Kyere et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Malaria is an old, curable vector-borne disease that is devastating in the tropics and subtropical regions of the world. The disease has unmatched complications in the human host, especially in children. Mathematical models of infectious diseases have been the steering wheel, driving scientists towards elucidation of the dynamic behaviour of epidemics and providing tailored strategic management of diseases. With the ongoing vaccination programs for vector-borne diseases, the research proposes a nonlinear differential equation model for the malaria disease that provides public health with a shift from the classical understanding of nonpharmaceutical preventive malaria control to pharmaceutical measures of vaccines. The asymptotic dynamic behaviour of the model is studied at the model’s equilibria. The bifurcation type invoked at the disease-free state is analysed, and the result revealed that the convention that R0 < 1 is the condition for eradicating the disease is not always sufficient when the system undergoes backward bifurcation. Furthermore, sensitivity analysis was investigated to quantify the amount of influence each parameter has on R0 . With the Latin hypercube sampling and partial rank correlation coefficient method, the uncertainty in R0 is computed with a 95% confidence interval, with the mean, and 5th and 95th percentiles, respectively, simulated as 0.143788, 0.01545, and 0.41491. An intervention model was derived from the nonintervention model to experiment with and evaluate the respective effects of the various pairings of interventions on the dynamics of the disease. Lastly, an in-depth cost analysis was studied to identify the most cost-effective intervention regarding rewarding the desired outcome. From the analysis, we recommend that besides the nonpharmaceutical measure of bed nets and insecticide spray, public health should target the pharmaceutical intervention of vaccine as it can close the gap in malaria prevention. Keywords: ACER; ICER; LHS-PRCC; optimal control; vector-borne diseases 1. Introduction Malaria is one of the most curable vector-borne diseases in the world, predominating in tropical and subtropical regions where the weather and change in climate favour the disease transmission [1]. Even though many eradication programs have been carried out, the disease remains endemic in these climate-favoured regions. The disease, over the years, has been a sting on the human race, causing both economic and social burdens through illness and death, and is recognised as one of the longest-known vector-borne health concerned diseases. In the 2022 report of the World Health Organization [2], an estimated 249 million and 608,000 malaria cases and deaths were reported. The estimates mean that in 2022, a hike of 5 million in additional cases was reported. In the WHO African region, 233 million cases of global Malaria cases were reported. The report constitutes 94% of malaria cases. The burden of the disease in Africa is alarming that billions of dollars are spent yearly by governments for prevention and treatment 2 services [3]. The disease is noted for its sensitivity to changing climatic conditions, with hot temperatures favouring the growth of the vector and multiplying transmissibility [4]. Recently, death related to malaria incidence has lowered significantly. However, cases of malaria incidence are on a surge in some metropolitans and local communities. The current epidemic surge in both metropolitans and local communities substantially reflects the changing dynamics of malaria transmission, with communities identified as free malaria regions witnessing higher cases and places marked as endemic areas having fewer cases. Areas of disease dominance include Africa, Asia, the Americas, and the Caribbean, with the disease endemic in regions with escalating sanitation problems. After a hurdle of many struggles, a significant landmark has been reached in vaccine development. In October 2021, the World Health Organization regulatory body endorsed the first-ever malaria vaccine, a breakthrough for vector-borne diseases [5]. Expectedly, the vaccine roll-out with other known malaria control measures such as sleeping under an insecticide-treated net and indoor and outdoor residual spray has pushed down the number of infected and hospitalized [6]. Mathematical modelling has been the framework for providing dynamic insight into disease transmission and phenomenon to stakeholders and intervention strategies needed to put in place for the optimum solution ([7–13]). The study of Tumwiine, Mugisha, and Luboobi [14] proposed a nonlinear model for malaria disease that captured human recruitment via repeated immigration. The study determined the model’s equilibria and carried out a global asymptotic stability analysis of the model’s equilibria. Sabbar, Yavuz, and Özköse [15] considered a general epidemic model that analysed the effect of stochasticity on the dynamic behaviour of extinction disease. Penny et al. [16] examined the cost-effective analysis of the malaria vaccine and its impact on the transmission of the disease by considering four models of malaria. Studies of Romero-Leiton and Ibargüen-Mondragón [17] considered a mathematical model of malaria disease that is segregated into eight compartments that determined to elucidate the dynamic behaviour of the epidemic in Tumaco, Colombia. The study examined the local and global dynamic stability behaviour at the model’s steady states. Further, the condition that leads to backward or forward bifurcation is determined. The model is then modified to optimal control by capturing time-dependent controls. Lastly, economic cost analysis is studied of the proposed strategies to find the optimum strategy. Research conducted by B. Traoré, Sangaré, and S. Traoré [18] proposed a nonlinear malaria model that factored the different developmental stages of the vector into consideration. The study, in addition, examined the impact of change in climate on the metamorphic life cycle of the vector. The global qualitative analysis of the model was studied to explore the dynamic behaviour of the epidemic’s steady states. The analysis showed that the global behaviour is dependent on the humans’ R0 and the vector’s effective reproduction number, Rv . In [19], the authors constructed a malaria model that explored the dynamic behaviour at the endemic state. The R0 was derived analytically, and Journal of Applied Mathematics the existence of the malaria-free point when R0 is less than one was proved. A perturbation analysis of the model was explored to approximate the endemic point. Stochastic perturbation is then applied to the model, resulting in a stochastic system. A numerical solution is provided for the models. The analyses showed that due to the stochastic variability, the infected people in the population are not constant but undergo fluctuations. In the study of Oke et al. [20], a deterministic malaria model was proposed that used differential equation tools to analyse the stability at the equilibria. The model determined controls for the dynamical system such that the objective function is optimized over a time frame. The impact of the identified controls on the infected individuals was investigated. The investigation results indicated that the pairing of the controls—treated bednet, medication, and insecticide spraying—substantially impacts the infectives by significantly minimizing it. In [21], the authors modelled a transmission model of malaria disease that primarily assessed the linearity of the R0 ’s parameters and their impact on the R0 . Further, measures that target the biting rate of the vector were identified. The model result proved that interventions that targeted the biting rate of the vector successfully controlled the epidemic. In the work of Huo and Qiu [22], a transmission model of malaria disease which considered the returning of infected humans not only to the susceptible compartment but to the infective as well is proposed. The model’s stability analysis at the steady states was carried out, which showed the persistence of the infection when R0 > 1 and the global asymptotic dynamic behaviour of the disease when R0 ≤ 1. Orwa, Mbogo, and Luboobi [23] considered a nonlinear compartmental malaria model that captured the liver stage to the blood stage of the parasite development and examined the impact of immune response and treatment on the disease transmission. The qualitative model analysis was studied, which revealed the asymptotic stability of the disease-free state locally and globally. In Ducrot et al.’s study [24], a malaria model that captured the two natures of the human host—semi-immune and nonimmune—was proposed. The condition that leads to backward or forward bifurcation is examined. Finally, measures to curb the disease were explored for the associated subgroup of semi-immune, nonimmune, and vector. From the studies of Yang [25], a compartmental model of malaria transmission is constructed that examines the impact of global warming on the dynamics of the disease. The model carried out an explicit derivation of the R0 . The analytic method of sensitivity analysis was applied to the model to assess the different scenarios when the model’s parameters are varied. The article by Nana-Kyere et al. [26] proposed an optimal intervention model with time-dependent controls that were qualitatively and numerically solved to find the optimum eradication measure for the disease. Arquam, Singh, and Cherifi [27] proposed and examined a datainspired SIR vector-borne model that assessed the temperature variations’ effect on vector-borne diseases. The study of Iggidr, Sallet, and Souza [28] examined the dynamics of multigroup vector-borne diseases, an extension of the Bailey–Dietz model. The research of Kuniyoshi and Santos [29] employed the variant SIR model type to analyse the Journal of Applied Mathematics effect of insecticide resistance on vector-borne diseases. The authors in [30] considered a SIR model for a vectortransmitted disease incorporating an age-structured vaccinated population to examine the impact of vaccines on the disease dynamics. They applied the results from the analysis to study dengue fever disease. Using the classical SIR model, the authors in [31] assessed the impact of mathematical models on intervention provision directed at managing vector-borne diseases. In the study of [32], a compartmentalized SEIR-SEI vector-borne model of host–vector is utilised to predict dengue outbreak. The model also estimated the epidemic’s important parameters by fitting it to actual dengue fever data. Smith et al. [33] developed a mathematical model for the malaria epidemic that assessed vaccines’ impact on the disease dynamics by fitting the model to field malariology datasets from several portions of Africa. In a related study of [34], a climate model that assessed the rainfall and temperature variability influence on the vector–host malaria model is considered. The model was fitted to malaria transmission data of Limpopo Province, South Africa, to determine all the malaria spikes in the province. The study of White et al. [35] employed the clinical trial data to estimate the efficacy of the RTS malaria vaccine profile using mathematical models. The study further illustrated how clinical trial estimated parameters can be utilised to forecast vaccination campaign impacts on the disease. Slater, Okell, and Ghani [36] explored the effects of integrating two factors: pharmacokinetic and pharmacodynamic in drug design on the malaria transmission dynamics in humans using mathematical models. The study demonstrated that the two therapies are the key to eliminating the disease. In Olaniyi et al.’s study [37], a malaria model that accounted for the different transmission trends in a social hierarchystructured population was proposed. A new optimal control model was developed to examine the proposed strategies’ efficiency. The cost-effectiveness analysis was considered to determine the most cost-effective strategy of the considered strategies. In [38], a mathematical model describing vector– host transmissibility dynamics is considered that focused primarily on the maturity delay of the vector. In [39], a malaria transmissibility model was proposed that examined the effect of the vaccine on the model’s dynamics. The analyses showed that a vaccine would minimize secondary infections when it minimizes the infectious period of the disease. Using the curve fitting technique, Nana-Kyere, Seidu, and Nantomah [40] calibrated a mathematical model in the context of Ghana that investigated the substantial intervention program for containing the disease in Ghana. With the ongoing vaccination program for vector-borne diseases, the research primarily focuses on deriving a mathematical model for the malaria epidemic that would provide public health with a shift from the classical understanding of nonpharmaceutical preventive malaria control to the pharmaceutical measure of vaccines by quantifying the potency of vaccines in eradicating the disease. The research would provide the public health decision body, a valuable insight into the significant contribution of vaccines, by reducing the overall disease burden and incidence, hospitalization, and death resulting from malaria disease. 3 The design of the research is as follows: The derivation of the Malaria model and demonstration of the model’s positivity and boundedness are presented in Section 2. Section 3 is devoted to the computation of R0 , assessment of the local stability of model system (1) at the model’s equilibria, and exploring the global stability of model system (1) at model’s equilibria, bifurcation study, global sensitivity analysis, and vaccine efficacy assessment. Section 4 redesigns the model system (1) to the intervention model to explore interventions that would help mitigate the disease. The section furthermore provided numerical simulations for the models to complement the analytic analyses. In Section 5, cost-effective analysis is studied to let stakeholders know which interventions to prioritize in their attempt to curb the menace. Section 6 provides a thorough discussion and conclusion based on the outcome of the investigation. 2. Derivation of the Malaria Model The present section formulates a nonlinear differential equation model for malaria disease that segregates the population into susceptible humans, SH ; exposed humans, EH ; vaccinated humans, V H ; asymptomatic humans, AH ; mildly infected humans, I H1 ; severely infected humans, I H2 ; and recovered humans, RH . The model assumes that the mildly infected are individuals who are showing symptoms of the disease but are not in the acute stage, while the severely infected individuals are those in the acute stage of the disease. Hence, the human population N H is denoted as follows: N H = SH + V H + EH + AH + I H1 + I H2 + RH . The vector has a population given by N V = SV + EV + I V , with SV , denoting susceptible mosquitoes, EV , the exposed mosquitoes, and I V , the infected mosquitoes. The model assumes that recruitments of susceptible humans and susceptible mosquitoes into the human and vector populations are, respectively, given by Λa and Λb . β1 and β2 represent the pathways of transmission from mosquitoes to humans and humans to mosquitoes. α denotes the biting rate of mosquitoes. The transition from the exposed to the asymptomatic human is given by the rate ψa . ϕa also denotes the transition from asymptomatic to mildly infected humans. σa is the rate at which the mildly infected humans progress to severely infected human status. γa represents the recovery rate of the severely infected humans. Further, σ1 represents the death of severely infected humans owing to the disease. δ1 , δ2 are the recovery rates of the asymptomatic and mildly infected humans. μδ is the natural death rate of humans. qm is the rate at which exposed mosquitoes progress to the infected compartment. In addition, μd is the mosquitoes’ natural death rate. ϕ1 is the vaccination rate of susceptible humans who are vaccinated, and ϕ2 is the rate at which the vaccinated humans enter the recovery compartment. Finally, d1 , d 2 , d3 , d 4 , η1 , and η2 are modification parameters. The following assumptions are presented in the schematic diagram of Figure 1. The description of the parameter values is further given in Table 1. 4 Journal of Applied Mathematics �� �� �� �1 �b VH �� �1 E� �d SV d1 �� �� V� �2 �1 A� HV d3 d4 �a �2 d2 �� EV �d �2 I�1 �� qm �� I�2 �1 �� IV �d �� R� �� Figure 1: Schematic of the malaria model. λVH is the per-capita contact transmission rate from mosquitoes to humans given by d η E + η2 I V SH S = Λa − ϕ1 SH − μδ SH − αβ1 1 V NH dt H d V = ϕ1 SH − ϕ2 V H − μδ V H dt H d η E + η2 I V SH − ψa + μδ EH E = αβ1 1 V NH dt H λVH = αβ1 η1 EV + η2 I V NH λHV , the per-capita infection rate from humans to mosquitoes given by d A = ψa EH − ϕa AH − δ1 AH − μδ AH dt H d I = ϕa AH − δ2 I H1 − σa I H1 − μδ I H1 dt H1 d I = σa I H1 − γa I H2 − σ1 I H2 − μδ I H2 dt H2 d R = γa I H2 + δ1 AH + δ2 I H1 + ϕ2 V H − μδ RH dt H d d E + d 2 AH + d3 I H1 + d4 I H2 S = Λb − μd SV − αβ2 1 H SV NH dt V λHV = αβ2 d1 EH + d 2 AH + d 3 I H1 + d 4 I H2 NH 2.1. Model Analysis: Positivity and Boundedness Theorem 1. Let SH , V H , EH , AH , I H1 , I H2 , RH , SV , EV , I V be the set of positive solution of the state Equation (1) with nonnegative parameters and initial condition given by SH ≥ 0, V H ≥ 0, EH ≥ 0, AH ≥ 0, I H1 ≥ 0, I H2 ≥ 0, RH ≥ 0, SV ≥ 0, EV ≥ 0, I V ≥ 0 . d d E + d2 AH + d 3 I H1 + d 4 I H2 SV − qm EV − μd EV E = αβ2 1 H NH dt V d I = qm EV − μd I V , dt V 1 Proof 1. To prove the positivity of model Equation (1), we apply the method demonstrated in [41]. Thus, we let U = Journal of Applied Mathematics 5 with ϱ1 = ϕ1 + μδ , ϱ2 = ϕ2 + μδ , ϱ3 = ψa + μδ , ϱ4 = ϕa + δ1 + μδ , ϱ5 = δ2 + σa + μδ , ϱ6 = γa + σ1 + μδ , ϱ7 = qm + μd , y1 = Ω2 + Ω3 + Ω4 + Ω5 , and Table 1: Malaria model parameters and description. Parameter Description α Biting rate of mosquitoes. ϕ1 Vaccination rate. B = Λa , 0, 0, 0, 0, 0, 0, Λb , 0, 0 T d1 , d2 , d3 , d4 Modification parameters. η1 , η2 Modification parameters. Λa Recruitment rate of humans. β1 σa Transmission probability from mosquitoes to humans. Transmission probability from humans to mosquitoes. Transition rate from the exposed to the asymptomatic compartment. Transition rate from the asymptomatic to the mildly infected compartment. Transition rate from the mildly infected to the severely infected compartment. γa Recovery rate of the severely infected humans. σ1 Disease-induced death rate. δ1 , δ2 Recovery rate of the asymptomatic and mildly infected humans. μδ Death rate of humans. β2 ψa ϕa Now, from the vaccinated equation of model Equation (1), solving with the integrating factor method gives t V H t = e− ϕ2 +μδ t V H 0 + ϕ1 SH t e− ϕ2 +μδ t dξ 0 The asymptomatic equation of model Equation (1) also gives t AH t = e− ϕa +δ1 +μδ t AH 0 + ψa EH t e− ϕa +δ1 +μδ t dξ 0 Further, solving the mildly infected equation of model Equation (1) with the integrating factor method gives Λb Recruitment rate of mosquitoes. qm ϕ2 Transition rate from the exposed mosquitoes to the infected compartment. Rate at which the vaccinated humans enter the recovery compartment. μd Death rate of mosquitoes. t I H1 t = e− δ2 +σa +μδ t I H1 0 + ϕa AH t e− δ2 +σa +μδ t dξ 0 Then, from the severely infected equation of model Equation (1), we get t SH , V H ,EH , AH , I H1 , I H2 , RH , SV , EV , I V T , Ω0 = α β1 η1 /N H EV , Ω1 = α β1 η2 /N H I V , Ω2 = α β2 d 1 /N H EH , Ω3 = α β2 d 2 / N H AH , Ω4 = α β2 d3 /N H I H1 , and Ω5 = α β2 d4 /N H I H2 . Then, representing malaria model Equation (1) as a nonlinear differential equation, we get dU = Q1 U + B dt 2 where Q1 = −ϱ1 − Ω0 + Ω1 0 0 0 0 0 0 0 0 0 ϕ1 −ϱ2 0 0 0 0 0 0 0 0 Ω0 + Ω1 0 −ϱ3 0 0 0 0 0 0 0 0 ψa 0 −ϱ4 0 0 0 0 0 0 0 0 0 ϕa −ϱ5 0 0 0 0 0 0 0 0 0 σa −ϱ6 0 0 0 0 0 ϕ2 0 δ1 δ2 γa −μδ 0 0 0 0 0 0 0 0 0 0 −y1 − μd 0 0 0 0 0 0 0 0 0 y1 −ϱ7 0 0 0 0 0 0 0 0 0 qm −μd I H2 t = e− γa +σ1 +μδ t I H2 0 + σa I H1 t e− γa +σ1 +μδ t dξ 0 It follows that d/dt V H ≥ 0, at t = 0, for V H 0 = 0, d/ dt AH ≥ 0, at t = 0, for AH 0 = 0, d/dt I H1 ≥ 0, at t = 0, for I H1 0 = 0, and d/dt I H2 ≥ 0, at t = 0, for I H2 0 = 0. Hence, from comparative analysis, the same can be concluded for the remaining state variables, SH t , I H2 t , SV t , EV t , I V t , which guarantee the positivity of the state variables throughout the study. Hence, based on this assertion, we argue that the off-diagonal entries of matrix Q1 are nonnegative and that of B ≥ 0. Hence, the malaria equation (1) is positively invariant in R10 + . Theorem 2. The malaria model (1) has a nonnegative solution and bounded positively within the invariant region, ϖ ∈ R10 ; ϖ= ≤ SH , V H , EH , AH , I H1 , I H2 , RH , SV , EV , I V ∈ R10 + , NH t Λa Λ ,N t ≤ b μδ V μd 6 Journal of Applied Mathematics Proof 2. Let N H t = SH + V H + EH + AH + I H1 + I H2 + RH and N V t = SV + EV + I V . Then, we can deduce the following: d N t = Λa − μ δ N H , dt H d N t = Λb − μd N V dt V 3. Malaria-Free State and Computation of the Basic Reproduction Number R0 The R0 rate, one of the look-out threshold quantities, measures on average the infected individuals; an infected person has been infected throughout infectivity. The R0 rate above one insinuates that the number of cases is rising, and the below one rate means the epidemic is waning. As owned by Seidu, Makinde, and Asamoah [42], the subsection uses the recently developed novel algebraic technique to derive the R0 . Thus, considering the Malaria-free state given by D0f = SH 0 , V H 0 , EH 0 , AH 0 , I H10 , I H20 , RH 0 , SV 0 , EV 0 , I V 0 R0 = J D0f = 5 Hence, it follows that dN H t /dt ≤ 0 and dN V t /d t ≤ 0 if N H 0 ≥ Λa /μδ and N V 0 ≥ Λb /μd . Hence, the region given by ϖ is positive invariant. Further, N H 0 > Λa /μδ and N V 0 > Λb /μd ; then, the solution approaches ϖ in the final time, or N H t and N V t approach Λa /μδ and Λb /μd asymptotically. Hence, the region given by ϖ attracts all the solutions in R10 + . 6 Λa Λa ϕ1 , , 0, 0, 0, 0, ϕ1 + μδ ϕ1 + μδ ϕ2 + μδ Λa ϕ1 ϕ2 Λ , b , 0, 0 μδ ϕ1 + μδ ϕ2 + μδ μd The Jacobian matrix of the infected subsystem evaluated at the malaria-free fixed point is obtained as 4 In addition, the vector-related equation of (3) becomes Λ N V t = b 1 − e−μd t + N V 0 e−μd t μd D0f = 3 From (3), solving the equation related to humans gives Λ N H t = a 1 − e−μδ t + N H 0 e−μδ t μδ where −ϱ3 0 0 0 αβ1 η1 SH 0 N H0 αβ1 η2 SH 0 N H0 ψa −ϱ4 0 0 0 0 0 ϕa −ϱ5 0 0 0 0 0 σa −ϱ6 0 0 αβ2 d1 SV 0 N H0 αβ2 d 2 SV0 N H0 αβ2 d3 SV 0 N H0 αβ2 d 4 SV 0 N H0 −ϱ7 0 0 0 0 0 qm −μd Following this method, the determinant of J D0f can be rewritten as Det J D0f = B − D, where B and D are the respective parts of the determinant containing infectivity/ transmission terms and transition terms obtained as follows. B=− α2 β1 β2 SV 0 SH 0 N H0 2 η1 μd + η2 qm ϱ6 ϱ5 ϱ4 d1 + ϱ6 ϱ5 ψa d2 + ϕa ϱ6 ψa d 3 + ϕa σa d 4 ψa D = μd ϱ6 ϱ3 ϱ4 ϱ7 ϱ5 Using Remark 3.1 of [42], the basic reproduction number of the model is obtained as R0 = β1 β2 SV 0 SH 0 α2 η1 μd + η2 qm ϱ6 ϱ5 ϱ4 d1 + ϱ6 ϱ5 ψa d 2 + ϕa ϱ6 ψa d3 + ϕa σa d4 ψa μd ϱ6 ϱ3 ϱ4 ϱ7 ϱ5 N H 0 2 7 Upon substituting the point D0f into Equation (7), the R0 becomes β1 β2 α2 η1 μd + η2 qm ϱ6 ϱ5 ϱ4 d 1 + ϱ6 ϱ5 ψa d 2 + ϕa ϱ6 ψa d3 + ϕa σa d 4 ψa Λb μ2δ ϱ1 ϱ3 ϱ4 ϱ5 ϱ6 ϱ7 Λa μ2d 3.1. Local Stability Analysis of Malaria-Free State Theorem 3. The Malaria-free point D0f of model (1) is LAS when R0 < 1 and unstable when R0 > 1. 8 Proof 3. The Malaria model (1) is linearized at D0f to give the following results. Journal of Applied Mathematics 7 0 0 0 0 0 0 0 −αβ1 η1 ϕ1 −ϱ2 0 0 0 0 0 0 0 0 0 −ϱ3 0 0 0 0 0 αβ1 η1 0 0 ψa −ϱ4 0 0 0 0 0 0 0 0 0 ϕa −ϱ5 0 0 0 0 0 0 0 0 0 σa −ϱ6 0 0 0 0 0 ϕ2 0 δ1 δ2 γa −μδ 0 0 0 0 0 −b1 d1 −b2 −b3 −b4 0 −μd 0 0 0 0 b1 d 1 b2 b3 b4 0 0 −ϱ7 0 0 0 0 0 0 0 0 0 qm −μd From (9), the first four eigenvalues are derived as Φ1 = −μd , Φ2 = −μd , Φ3 = −ϱ1 , and Φ4 = −ϱ2 . The eigenvalues that remain are derived by the submatrix SM as follows: SM = SH 0 N H0 −ϱ1 SH 0 N H0 SH 0 N H0 −ϱ3 0 0 0 αβ1 η1 ψa −ϱ4 0 0 0 0 0 ϕa −ϱ5 0 0 0 0 0 σa −ϱ6 0 0 b1 d1 b2 b3 b4 −ϱ7 0 0 0 0 0 qm −μd αβ1 η2 10 Following the Routh–Hurwitz criterion [43, 44], submatrix SM will have negative real eigenvalues if Tr SM < 0 and −αβ1 η2 SH 0 N H0 0 SH 0 N H0 αβ1 η2 SH 0 N H0 Det > 0. Hence, from submatrix SM , it can be deduced that the trace Tr SM = − ϱ3 + ϱ4 + ϱ5 + ϱ6 + ϱ7 < 0 and Det = ϱ23 ϱ24 ϱ25 ϱ26 ϱ27 μd 1 − R0 . It follows from the above derivations that when R0 < 1, then all eigenvalues of submatrix SM would have a negative real part. Hence, the malaria model (1) would be locally asymptotically stable at D0f , but otherwise unstable. 3.2. Local Stability Analysis of Malaria-Present Equilibrium. The malaria-present equilibrium is a point with at least one nonzero infected state. The subsection determines D∗f = S∗H , V ∗H , E∗H , A∗H , I ∗H1 , I ∗H2 , R∗H , S∗V , E∗V , I ∗V , representing the malaria-present steady states of model (1). Thus, the equations of the malaria model (1) are expressed in terms of the force of infection of the Malaria-present states as Λa , ϱ1 + μδ + λ∗VH A∗H = λ∗VH Λa ψa , ϱ1 + μδ + λ∗VH ϱ3 ϱ4 S∗V = Λb , μd + λ∗HV R∗H = λ∗VH Λa ψa ϕa σa γa ϱ2 + λ∗VH Λa ψa δ1 ϱ2 ϱ5 ϱ6 + λ∗VH Λa ψa ϕa δ2 ϱ2 ϱ6 + Λa ϕ1 ϕ2 ϱ3 ϱ4 ϱ5 ϱ6 μδ ϱ1 + μδ + λ∗VH ϱ2 ϱ3 ϱ4 ϱ5 ϱ6 I ∗H1 = Λa ϕ1 , ϱ1 + μδ + λ∗VH ϱ2 λ∗VH Λa ϱ1 + μδ + λ∗VH ϱ3 S∗H = V ∗H = λ∗VH Λa ψa ϕa , ϱ1 + μδ + λ∗VH ϱ3 ϱ4 ϱ5 E∗V = 9 λ∗HV Λb , ϱ7 μd + λ∗HV E∗H = I ∗H2 = λ∗VH Λa ψa ϕa σa ϱ1 + μδ + λ∗VH ϱ3 ϱ4 ϱ5 ϱ6 I ∗V = λ∗HV Λb qm ϱ7 μd + λ∗HV μd 8 Journal of Applied Mathematics The subpopulations S∗H , V ∗H , E∗H , A∗H , I ∗H1 , I ∗H2 , R∗H are summed up to obtain N ∗H = Λa μδ ϱ2 ϱ3 ϱ4 ϱ5 ϱ6 + Λa ϕ1 μδ ϱ3 ϱ4 ϱ5 ϱ6 + λ∗HV Λa μδ ϱ2 ϱ4 ϱ5 ϱ6 + λ∗HV Λa ψa μδ ϱ2 ϱ5 ϱ6 μδ ϱ1 + μδ + λ∗HV ϱ2 ϱ3 ϱ4 ϱ5 ϱ6 ∗ λ Λ ψ ϕ μ ϱ ϱ + λ∗HV Λa ψa ϕa σa μδ ϱ2 + λ∗HV Λa ψa δ1 ϱ2 ϱ5 ϱ6 + λ∗HV Λa ψa ϕa σa γa ϱ2 + HV a a a δ 2 6 μδ ϱ1 + μδ + λ∗HV ϱ2 ϱ3 ϱ4 ϱ5 ϱ6 ∗ λ Λ ψ ϕ δ ϱ ϱ +Λ ϕ ϕ ϱ ϱ ϱ ϱ + HV a a a 2 2 6∗ a 1 2 3 4 5 6 μδ ϱ1 + μδ + λHV ϱ2 ϱ3 ϱ4 ϱ5 ϱ6 Now, with the force of infections given by 11 that R0 < 1 is an insufficient condition to eliminate the disease. Following the investigation, the mitigation of the disease would be challenging unless much effort and better intervention measures are applied. To confirm backward bifurcation possibility in malaria model (1), we let the discriminant Θ21 − 4Θ0 Θ2 = 0 and derive the critical value of λ∗VH = αβ1 η1 E∗V + η2 I ∗V N ∗H 12 λ∗HV = αβ2 d 1 E∗H + d2 A∗H + d 3 I ∗H1 + d4 I ∗H2 N ∗H 13 R0 , denoted by Rc < 1. The derivation results in Rc = The malaria model (1) satisfies the following polynomial equation at the malaria-present point D∗f : 1 − Θ21 /4Θ0 ϱ22 ϱ23 ϱ24 ϱ25 ϱ26 ϱ27 μd , which confirms the following theorem. Θ0 λ∗VH 2 + Θ1 λ∗VH + Θ2 = 0 Theorem 5. The malaria model (1) exhibits backward bifurcation when D3 of Theorem 4 holds, resulting in Rc < R0 < 1. 14 where Θ0 = Λa ϱ2 μδ ϱ4 ϱ5 ϱ6 + ψa μδ ϱ5 ϱ6 + ψa ϕa μδ ϱ6 + ψa δ1 ϱ5 ϱ6 + ψa ϕa σa γa + ψa ϕa δ2 ρ6 + ψa ϕa σa μδ ϱ2 Θ1 = Λa ϱ3 ϱ4 ϱ5 ϱ6 ϱ2 μδ + ϕ1 μδ + ϕ1 ϕ2 Θ2 = ϱ22 ϱ23 ϱ24 ϱ25 ϱ26 ϱ27 μd 1 − R0 The polynomial Equation (14) is used to demonstrate the likelihood of multiple endemic equilibria even with R0 < 1. As observed, the coefficient Θ0 always remains nonnegative for nonnegative parameter values, and Θ2 will be nonpositive when R0 > 1. Hence, the underlying theorem holds. Theorem 4. The malaria model (1) has D1: a unique endemic steady-state point D∗f if Θ2 < 0 ⇔ R0 > 1; D2: a unique endemic steady-state D∗f if Θ2 < 0, and either Θ2 = 0 or Θ21 − 4Θ0 Θ2 = 0; D3: two endemic steady states if Θ2 > 0, Θ1 < 0 and Θ21 − 4Θ0 Θ2 > 0; D4: no endemic steady state otherwise. The discourse from Theorem 4 implies the following. In D1 , the malaria model (1) has a unique endemic state when R0 > 1. Further, D3 indicates a backward bifurcation possibility. Thus, the coexistence of the disease-free and endemic steady states when R0 < 1. Backward bifurcation implies 3.3. Global Stability Analysis of Malaria-Free State. Consider the malaria model system (1). If the model system (1) is globally asymptotically stable at the malaria-free point D0f , then the system will always remain stable at D0f and the disease will not persist, regardless of the amount of the perturbation. The subsection would investigate the Castillo-Chavez approach, which has been shown in the research of [41, 45], to study the global asymptotic stability of the malaria model at the malaria-free equilibrium. The analysis is presented as follows: dχ1 = h1 χ 1 , χ 2 dt 15 dχ2 = h2 χ 1 , χ 2 , h 2 χ 1 , 0 = 0 dt 16 with χ1 representing the population of uninfected. Thus, χ1 = SH , V H , RH , SV , and χ2 denotes the infected, with χ2 = EH , AH , I H1 , I H2 , EV , I V . The disease-free state of model system (1) is given by D0f = χ01 , 0 . Hence, the point χ01 , 0 is a globally asymptotically stable equilibrium for the model (1) if the following criteria are satisfied. Z 1 Given dχ1 /dt = h1 χ1 , 0 , χ01 is GAS. Z 2 h χ1 , χ2 = Zχ2 − h2 χ1 , χ2 , where h2 χ1 , χ2 ≥ 0 for χ1 , χ2 ∈ ζ Journal of Applied Mathematics 9 Theorem 6. The point D0f = χ01 , 0 is GAS whenever R0 < 1. In addition, d S + V H + RH = Λa − μδ SH + V H + RH dt H Proof 4. The model system (1) is considered to derive h1 χ1 , χ2 and h2 χ1 , χ2 as Λa − ϕ1 SH − μδ SH − αβ1 Solving Equation (19) gives η1 E V + η2 I V SH NH SH + V H + RH t = ϕ1 SH − ϕ2 V H − μδ V H h 1 χ1 , χ2 = γa I H2 + δ1 AH + δ2 I H1 + ϕ2 V H − μδ RH Λb − μd SV − αβ2 αβ1 σa I H1 − γa I H2 − σ1 I H2 − μδ I H2 SH t = Λa ϕ1 + μδ VH t = Λa ϕ 1 ϕ1 + μδ ϕ2 + μδ qm EV − μd I V SV t = First, to prove condition Z 1 , the system dχ1 /dt = h1 χ1 , 0 is structured as follows: Λb μd which implies the convergence of χ01 . Hence, χ1 = χ01 is GAS, which verifies condition one. What happens next is that the assessment of condition Z 2 is done with h2 χ1 , χ2 = Zχ2 − h2 χ1 , χ2 . Thus, we have αβ1 η1 SH 0 NH αβ1 η2 SH 0 NH −ϱ3 0 ψa −ϱ4 0 0 0 0 0 ϕa −ϱ5 0 0 0 0 0 σa −ϱ6 0 0 SV αβ2 d1 0 NH SV αβ2 d 2 0 NH SV αβ2 d 3 0 NH SV αβ2 d4 0 NH −ϱ7 0 0 0 0 qm −μd 17 h2 χ1 , χ2 = 0 which gives χ01 = 21 Λa ϕ1 ϕ2 RH t = μδ ϕ1 + μδ ϕ2 + μδ d 1 EH + d2 AH + d 3 I H1 + d 4 I H2 SV − qm EV − μd EV NH d S = Λ − ϕ1 + μδ SH dt H d V = ϕ1 SH − ϕ2 + μδ V H dt H d R = ϕ2 V H − μδ RH dt H d S = Λ b − μ d SV dt V e−μδ t Now, from (18), as t ⟶ ∞, η1 E V + η2 I V SH − ψa + μδ EH NH ϕa AH − δ2 I H1 − σa I H1 − μδ I H1 αβ2 Λa Λa − − SH + V H + R H 0 μδ μδ 20 d 1 EH + d2 AH + d 3 I H1 + d 4 I H2 SV NH ψa EH − ϕa AH − δ1 AH − μδ AH h 2 χ1 , χ2 = 19 Λa Λa ϕ1 Λa ϕ1 ϕ2 Λ , , , b ϕ1 + μδ ϕ1 + μδ ϕ2 + μδ μδ ϕ1 + μδ ϕ2 + μδ μd EH h 2 χ1 , χ2 AH 0 I H1 and 0 0 0 − I H2 0 EV 0 IV 0 22 Λa − SH t = ϕ1 + μδ Λa − SH 0 e− ϕ1 +μδ t ϕ1 + μδ ϕ1 SH t − ϕ2 + μδ ϕ 1 SH t − V H 0 e− ϕ2 +μδ t ϕ2 + μδ VH t = Hence, h2 χ1 , χ2 is derived as follows: h2 χ1 , χ2 ϕV t ϕV t RH t = 2 H − 2 H − RH 0 e−μδ t μδ μδ SV t = η2 EV S − SH N H H0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 d E αβ2 1 H SV 0 − SV NH d A αβ2 2 H SV 0 − SV NH d I αβ2 3 H1 SV 0 − SV NH d I αβ2 4 H2 SV 0 − SV NH 0 0 0 0 αβ1 = Λb Λb − − SV 0 e−μd t μd μd 18 η1 E V S − SH N H H0 αβ1 10 Journal of Applied Mathematics From model Equation (1), it can be confirmed that the population of the humans is bounded by SH 0 and that of the vector by SV 0 . Hence, αβ1 η1 EV /N H SH ≤ αβ1 η1 EV /N H SH 0 , αβ1 η2 EV /N H SH ≤ αβ1 η2 EV /N H SH 0 , αβ2 d1 EH /N H SV ≤ αβ2 d1 EH /N H SV 0 , αβ2 d 2 AH /N H SV ≤ αβ2 d2 AH /N H SV 0 , αβ2 d3 I H1 /N H SV ≤ αβ2 d3 I H1 /N H SV 0 and αβ2 d4 I H2 / P f y = diag 0, EH /AH − EH AH /A2H , EH /AH −EH AH /A2H and ′ P f y P y − = diag 0, EH /EH − AH /AH , EH /EH − AH /AH . Further, Py A j P y −′ = 2 N H SV ≤ αβ2 d4 I H2 /N H SV 0 which implies that h2 χ1 , χ2 is positive definite. It can also be noted that h2 χ1 , χ2 is an M-matrix with the off-diagonal entries nonnegative. Hence, the requirement of the two conditions is met, which is proof of the global asymptotic stability of D0f . Proof 5. In the study of [46], we refer to Theorem 5 and Lemma 3 and Lemma 4 to deduce the GAS of model (1) at the malaria-present state D∗f . We let SH , EH , AH represent the subsystem of model (1) as follows: d η E + η2 I V SH S = Λa − ϕ1 SH − μδ SH − αβ1 1 V NH dt H d η E + η2 I V SH − ψa + μδ EH EH = αβ1 1 V NH dt 23 d A = ψa EH − ϕa AH − δ1 AH − μδ AH dt H −ϕ1 − μδ − αβ1 αβ1 0 η1 EV + η2 I V NH − ψa + μδ 0 0 ψa − ϕ a + δ1 + μ δ Let g1 = −ϕ1 − μδ − αβ1 η1 EV + η2 I V /N H , g2 = αβ1 η1 EV + η2 I V /N H 2 It follows that the second additive matrix, A j , becomes 2 EH AH g1 − ϱ4 0 0 g2 −ϱ3 − ϱ4 ψa 2 ρ= ρ11 ρ12 ρ21 ρ22 where ρ11 = g1 − ϱ3 , ρ12 = 0 ρ22 = 0 , ρ21 = ψa EH /AH 0 g1 − ϱ4 + EH /EH − AH /AH 0 g2 −ϱ3 − ϱ4 + EH /EH − AH /AH Now, let Y = Y 1 , Y 2 , Y 3 be a vector in R3 , with its norm • given by Y = max Y 1 , Y 2 , Y 3 . Let L A be a Lozinki measure with respect to Y . Then, the approximating method as in [47] is applied such that L A ≤ sup z 1 , z 2 , where sup z 1 , z 2 = sup L ρ11 + ρ12 , L ρ22 + ρ21 and ρ12 , ρ21 denote matrix norms with respect to the vector norm L1 . L also denotes the Lozinki measure concerning the L1 . Then, ρ12 = max 0, 0 = 0 ρ21 = max 0 Aj = 0 L ρ11 = g1 − ϱ3 Now, the Jacobian of submatrix (23) is derived as follows: η1 E V + η2 I V NH 0 Hence, matrix ρ = Py A j P y −′ + P f y P y −′ is derived as follows: 3.4. Global Stability Analysis of Malaria-Present State. The subsection is geared towards determining the global dynamic behaviour of model (1) at the malaria-present state. Theorem 7. With R0 > 1, the malaria-present point D∗f of model system (1) is GAS, otherwise unstable. g1 − ϱ3 g1 − ϱ3 0 0 ψa g1 − ϱ4 0 0 g2 −ϱ3 − ϱ4 Now, the function P y = SH , EH , AH is derived as P y = diag 1, EH /AH , EH /AH , and P y −′ = diag 1, AH /EH , AH /EH . Hence, the rate of change of P f y is given by L ρ22 = max ψa EH E , 0 = ψa H AH AH g1 − ϱ4 + g2 + −ϱ3 − ϱ4 + E H AH − , E H AH E H AH − E H AH Hence, L ρ22 = −ϱ3 − ϱ4 − EH /EH − AH /AH . It follows from Equation (23) that z 1 = L ρ11 + ρ12 = EH′ − ϱ1 EH z 2 = L ρ22 + ρ21 = EH′ − ϱ3 EH Journal of Applied Mathematics 11 Now, L A ≤ sup z 1 , z 2 = EH′ − ϱ3 EH 24 Following the above deductions, Equation (24) is put into (25) below. 1 t L A dt t 0 25 1 t EH′ − ϱ3 dt t 0 EH 26 Π = lim supsup t⟶∞ Hence, Π = lim supsup t⟶∞ Π= 1 E t ln − ϱ3 < 0 t E 0 27 It follows from (27) that the subsystem (23) is GAS around the interior point of S∗H , E∗H , A∗H . Hence, for the remaining subsystem of (1) given below, d V = ϕ1 SH − ϕ2 V H − μδ V H dt H d I = ϕa AH − δ2 I H1 − σa I H1 − μδ I H1 dt H1 d I = σa I H1 − γa I H2 − σ1 I H2 − μδ I H2 dt H2 d R = γa I H2 + δ1 AH + δ2 I H1 + ϕ2 V H − μδ RH dt H d d E + d 2 AH + d 3 I H1 + d4 I H2 S = Λb − μd SV − αβ2 1 H SV NH dt V d d E + d 2 AH + d 3 I H1 + d4 I H2 SV − qm EV − μd EV E = αβ2 1 H NH dt V d I = qm EV − μd I V dt V 28 When the subsystem (28) is solved with the initial conditions of V H 0 , I H 1 0 , I H 2 0 , RH 0 , SV 0 , EV 0 , and I V 0 , then as t ⟶ ∞, V H ⟶ V ∗H , I H 1 ⟶ I ∗H 1 , I H 2 ⟶ I ∗H 2 , RH ⟶ R∗H , SV ⟶ S∗V , EV ⟶ E∗V , and I V ⟶ I ∗V . Hence, the GAS of the endemic point D∗f is ascertained. 3.5. Sensitivity Analysis. The R0 , known to be one of the essential threshold quantities, is associated with many parameters which are susceptible to change. Owing to the susceptibility of these parameters, sensitivity analysis becomes inevitable in epidemiological modelling as it sheds light on which parameters significantly affect the R0 and needs to be worked on. The susceptibility in the model parameters that are directly involved in the computation of the R0 creates variability in the estimate of R0 . However, the statistical methods—the Latin hypercube sampling (LHS) and partial rank correlation coefficient (PRCC)—are considered to assess the variability in the R0 (see [48, 49]). With a MATLAB simulation, the method enables us to dive into the variability analysis of the malaria model (1) parameter. For the R0 of Malaria model (1) given by Equation (7), the LHS quantifies the magnitude of the influence of the parameters, and by the PRCC, we find influential parameters by their computed values. By considering a 1000 sample, the LHS analyses the uncertainty of R0 as displayed by the histogram in Figure 2. From Figure 2, the uncertainty in R0 is exhibited by the histogram with the uncertainty computed using a 95% confidence interval as shown by the broken lines. The distribution depicts the estimated values of R0 , the mean, and 5th and 95th percentiles, respectively, simulated as 0 143788, 0 01545, 0 41491. Generally, the distribution of R0 becomes widely spread with higher uncertainty. Figure 3 is the PRCC diagram, and it displays the sensitivity of R0 to the considered model parameters of the malaria model (1). From the simulation of the PRCC, the most crucial parameters are those with significantly small p value p ≤ 0 005 and big PRCC value, as it indicates a stronger relationship between the parameters. The PRCC-generated findings of Figure 3 showed that the parameters μδ , α, β1 , η1 , η2 , Λb , μd , β2 , d 1 , d 2 , d 3 , d 4 and qm have PRCC bars in a positive direction. These parameters exert to some extent a certain amount of influence on the R0 . However, the parameters with the most significant influence are the ones with their bars exceeding the threshold marked by the red bar. The significance of decreasing the values of the parameters with high positive bars is that it decreases the R0 , bringing it down to less than one. Also, the parameters Λa , ϕ1 , ψa , ϕa , δ1 , δ2 , γa , σa have PRCC bars in a negative direction, which means when their values are increased, they will help lower the R0 . Hence, the interventions should aim at lowering the positive PRCC parameter values and increase the parameters Λa , ϕ1 , ψa , ϕa , δ1 , δ2 , γa , σa . The observation of Figures 4(a), 4(b), 4(c), 4(d), 4(e), and 4(f) showed a positive effect of the identified parameters on R0 . Hence, increasing awareness to prevent mosquito bites through the use of treated bednet, spraying the environment to reduce drastically the mosquito population with insecticide spray, and adhering to pharmaceutical interventions such as seeking early medical attention at the early onset of the disease and implementation of effective vaccination programs would reduce R0 . Furthermore, the analysis was carried further by generating a 3D plot for some selected parameters. The generated figure of Figure 5(a) showed that increasing the value of α from zero to one increases the R0 , but the R0 remains the same even if μδ is increased from zero to one. From Figure 5(b), we noticed that as β1 increased from zero to 1, the R0 increases. But R0 remains the same as ψa increased from zero to one. Lastly, we observed from Figure 5(c) that as β2 increases from zero to one, it causes R0 to increase but R0 remains the same when ψa is increased from zero to one. 3.6. Bifurcation. Over time, it has become established that R0 < 1 guarantees the eradication of diseases. This claim, however, has been refuted by several recent epidemiological 12 Journal of Applied Mathematics 2000 X 0.143788 Y 2000 X 0.137358 Y 1900 1800 (estimate) R0 (mean) 1600 R0 (5th) 1400 Frequency X 0.384917 Y 1500 X 0.0354541 Y 1500 1200 1000 800 600 400 R0 (95th) 200 0 0 0.1 0.2 0.3 0.4 0.5 R0 0.6 0.7 0.8 0.9 1 Figure 2: Uncertainty assessment of R0 displayed by the histogram with the broken line of the diagram indicating a 95% confidence interval, an estimate line (dashed red line), and the mean (continuous line) of R0 . PRCC for R0 1 ∗ ∗ ∗ ∗ ∗ 0.8 ∗ ∗ ∗ 0.6 ∗ Sensitivity measure 0.4 ∗ 0.2 ∗ ∗ 0 ∗ ∗ ∗ �a �1 –0.2 –0.4 –0.6 –0.8 ∗ ∗ ∗ �� �1 –1 � � � �1 �1 �2 �a �2 �a �� �1 �b �d �2 d1 d2 d3 d4 qm Parameter PRCC Significant (p < 0.05) Figure 3: Sensitivity measure of R0 in respect to changes in the model’s parameters using the PRCC index. Bars with “∗ ” are the parameters that need to be targeted in control intervention programs. Thus, the parameters with positive bars needs to be minimized and those with negative bars needs to be increased. studies that involve backward bifurcation. The phenomena in several disease modelling research have demonstrated the potential for the disease to persist even in the presence of stable disease-free equilibrium and R0 < 1. A stable disease-free and endemic equilibrium coexisting in the system contributes to the disease’s persistence. Backward bifurcation has a significant negative impact on disease control since it would need a more aggressive strategy to bring the mathematical R0 < 1 when the illness starts to spread. The subsection explores the possibility of backward bifurcation in model system (1), by exploring Journal of Applied Mathematics 13 0.16 0.9 0.1 4 2 0.1 8 0.0 0.1 0.16 0.8 0.14 0.14 0.7 0.1 2 0.12 0.0 6 0.1 0.0 0.6 0.14 8 0.12 0.5 0.1 0.1 � 0.12 0.08 0.08 0.0 0.1 6 0.4 0. 0 0.1 4 0.08 0.06 0.3 0.06 0.2 0.08 0.08 0.06 0.04 0.04 0.06 0.06 0.04 0.02 0.1 0.02 0.04 0.02 0.1 0.2 0.02 0.3 0.04 0.02 0.4 0.5 0.04 0.02 0.6 0.7 0.8 0.9 �1 (a) Contour plot of R0 as a function α and β1 0.9 0.13 0.8 0.12 0.1 0.11 3 0.09 0.08 0.07 0.06 0.05 0.04 0.1 0.7 2 0.1 0.11 0.1 0.6 0.09 �2 0.5 0.08 2 0.1 1 0.1 0.1 0.09 0.08 0.07 0.06 0.05 0.04 0.4 0.07 0.3 0.06 0.2 0.05 1 0.1 0.1 0.09 0.08 0.07 0.06 0.05 0.04 0.1 0.04 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 � (b) Contour plot of R0 as a function α and β2 0.095 0.9 0.0 85 5 0.07 8 0.0 0.8 0.0 95 0.0 0.7 0.0 8 5 0.07 0.6 0.09 9 0.085 75 0.0 0.0 0.0 8 9 �1 0.5 0.0 85 0.08 0.4 0.0 8 0.0 7 0.0 0.3 0.08 5 75 0.075 0.08 0.2 0.0 75 0.08 0.1 0.07 0.0 7 0.1 0.2 0.3 0.4 0.5 0.6 0.7 1 (c) Contour plot of R0 as a function ϕ1 and δ1 Figure 4: Continued. 0.8 0.9 14 Journal of Applied Mathematics 0.22 0.9 4 6 2 0.2 0.1 8 0.1 0.1 2 0.1 0.1 0.8 0.2 0.2 0.7 0.18 0.2 0.18 0.6 0.1 0.1 0.1 4 0.16 2 0.1 0.5 6 0.18 �2 0.16 0.14 0.14 0.4 0.16 0.12 0.14 0.1 0.3 0.12 0.12 0.2 0.14 0.12 0.1 0.1 0.12 0.08 0.1 0.1 0.1 0.08 0.1 0.2 0.08 0.1 0.08 0.3 0.4 0.08 0.5 0.6 0.7 0.8 0.9 1 (d) Contour plot of R0 as a function ϕ1 and δ2 0.1 0.9 95 85 0.0 9 0.095 75 0.0 8 0.0 0.8 0.1 0.0 0.0 0.7 0.0 95 0.0 9 0.09 0.0 8 0.6 5 0.0 8 0.09 0.085 0.08 5 0.0 � a 75 0.0 0.5 7 0.4 0.0 8 0.08 0.085 0.0 75 0.3 0.08 0.075 0.2 0.0 7 0.08 0.07 5 0.1 0.07 0.075 0.07 0.1 0.2 0.3 0.075 0.4 0.5 0.6 0.7 0.8 0.9 1 (e) Contour plot of R0 as a function ϕ1 and γa 0.14 0.9 0.1 2 3 0.1 0.0 8 0.0 0.13 9 0.8 0.1 0.1 1 0.1 0.11 0.1 3 2 0.1 7 0.0 0.6 0.12 4 0.7 9 0.0 8 0.0 0.1 �2 1 0.1 0.1 0.5 0.09 0.4 0.08 7 0.0 6 0.0 0.1 2 0.07 0.1 1 0.1 9 0.0 8 0.0 0.3 0.2 0.06 0.1 2 0.05 0.0 0.0 9 7 6 5 0.0 0.0 0.1 0.1 1 0.1 0.04 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 a (f) Contour plot of R0 as a function ϕa and δ2 Figure 4: Contour plot of R0 as a function of ϕa , α, β1 , β2 , ϕ1 , δ1 , δ2 , ϕ1 , γa , and δ2 . Journal of Applied Mathematics 15 0.18 0.2 0.16 0.14 0.15 R0 0.12 0.1 0.1 0.05 0.08 0.06 0 1 0.9 0.04 0.8 0.7 0.6 0.5 0.4 0.3 0.2 00.11 � 0 0.1 00.22 0.7 0.6 0.5 0.4 0.3 0.8 0.9 1 0.02 0 � � (a) Sensitivity plot of R0 in terms of α and μδ 0.1 0.09 0.12 0.08 0.1 0.07 R0 0.08 0.06 0.06 0.05 0.04 0.04 0.02 0.03 0 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 00.11 �a 0 0 00.11 0.2 0.3 0.5 0.4 0.6 0.7 0.8 0.9 1 0.02 0.01 0 �1 (b) Sensitivity plot of R0 in terms of ψa and β1 0.078 0.08 0.076 0.075 R0 0.074 0.072 0.07 0.07 0.065 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 00.22 �a 0.1 0 0 0.1 0.2 00.33 0.5 0.4 0.6 0.7 0.8 0.9 1 0.068 0.066 �2 (c) Sensitivity plot of R0 in terms of ψa and β2 Figure 5: Sensitivity plot of R0 as a function of α, β1 , β2 , ψa , and μδ . 16 Journal of Applied Mathematics the theory of central manifold as applied in [50]. Thus, suppose β1 = β∗1 is considered as the bifurcation parameter, then from (7), β1 = β∗1 at R0 becomes β∗1 = αμδ η1 μd + η2 qm Now, following matrix (9), the right eigenvector w = w1 , w2 , ⋯, w10 T is given by ϱ21 ϱ23 ϱ24 ϱ25 ϱ26 ϱ27 μ2d b3 ψa ϱ3 ϱ6 + b1 d 1 ϱ4 ϱ5 ϱ6 + b2 ψa ϱ5 ϱ6 + b4 ϱ3 ψa σa 29 w 1 = η1 ϱ3 μd w ϱ1 η1 μd + η2 qm 3 w 2 = ϕ1 η1 ϱ3 μd w ϱ1 ϱ2 η1 μd + η2 qm 3 w4 = ψa w ϱ4 3 w5 = ϕa ψ a w ϱ4 ϱ5 3 w6 = σa ϕa ψa w ϱ4 ϱ5 ϱ6 3 w7 = ϕ2 ϕ1 η1 ϱ3 ϱ4 ϱ5 ϱ6 μδ μd + δ1 ψa ϱ1 ϱ2 ϱ5 ϱ6 T 1 + δ2 ϕa ψa ϱ1 ϱ2 ϱ6 T 1 + γa σa ϕa ψa ϱ1 ϱ2 T 1 w3 ϱ1 ϱ2 ϱ4 ϱ5 ϱ6 T 1 w8 = −αβ2 Λb d1 ϱ4 ϱ5 ϱ6 + d2 ψa ϱ5 ϱ6 + d3 ϕa ψa ϱ4 + d 4 σa ϕa ψa w3 μ2d ϱ4 ϱ5 ϱ6 w9 = ϱ3 μd w αβ1 η1 μd + η2 qm 3 w3 > 0 w10 = qm ϱ3 w αβ1 T 1 3 with T 1 = η1 μd + η2 qm v6 = αβ2 Λb d4 v μd ϱ6 N H 9 v5 = αβ2 Λb σa d 4 + d2 ϱ6 v9 μd ϱ6 N H v4 = αβ2 Λb ϕa σa d 4 + ϕa d2 ϱ6 + d 2 ϱ5 ϱ6 v9 μd ϱ4 ϱ5 ϱ6 In addition, matrix (9) has a left eigenvector v = v1 , v2 , ⋯, v10 , which satisfies the condition v w = 1, where v1 = v2 = v7 = v8 = 0 v9 > 0 v3 = αβ2 Λb v10 = ϕa ϕa σa d 4 + ψa ϕa d2 ϱ6 + ψa d2 ϱ5 ϱ6 + d1 ϱ4 ϱ5 ϱ6 v9 ϱ3 ϱ4 ϱ5 ϱ6 ϱ3 ϱ4 ϱ5 ϱ6 ϱ7 − α2 β1 β2 η1 Λb ψa ϕa σa d 4 + ψa ϕa d2 ρ6 + ψa d 2 ϱ5 ϱ6 + d 1 ϱ4 ϱ5 ϱ6 ϱ3 ϱ4 ϱ5 ϱ6 v9 Journal of Applied Mathematics 17 Following Theorem 4.1 in [50], the nonzero partial derivatives in relation to the equation a and b given by wi w j ∂2 f k β∗1 , 0 ∂xi ∂x j k,i, j=1 30 wi ∂2 f k β∗1 , 0 ∂xi ∂β∗1 k,i=1 31 n a = vk 〠 and n b = vk 〠 are derived as follows: ∂2 f3 ∂2 f3 w = = αβ1 η1 v3 9 w1 ∂x1 ∂x9 ∂x9 ∂x1 NH ∂2 f3 ∂2 f3 w = = αβ1 η2 v3 10 w1 ∂x1 ∂x10 ∂x10 ∂x1 NH undergo forward bifurcation when a is negative and backward bifurcation when a is positive. 3.7. Vaccine Effect Assessment. As mentioned in the proceeding objective, the impact of vaccines on the malaria disease dynamics is assessed by conducting a comprehensive analysis using MATLAB 18 to generate graphs for a detailed study. The simulated plot of the graphs revealed that increasing the vaccination parameter ϕ1 reduces the number of the exposed, asymptomatic, mildly, and severely infected humans. As noted in Figures 6(a), 6(b), 6(c), and 6(d), when the dose of the vaccination rate ϕ1 increasingly takes the set of values of 0.059, 0.259, 0.559, 0.759, and 0.959, it decreases the exposed, asymptomatic, mildly, and severely infected human cases. The analysis indicates that vaccines hold substantial public health implications by shifting the classical understanding of nonpharmaceutical preventive malaria control such as insecticide net usage and spraying the environment to control the vector to the pharmaceutical measure of vaccines. ∂2 f9 ∂2 f9 w = = αβ2 d 1 v9 3 w8 ∂x3 ∂x8 ∂x8 ∂x3 NH 4. The Intervention Model Development ∂2 f9 ∂2 f9 w = = αβ2 d 2 v9 3 w8 ∂x4 ∂x8 ∂x8 ∂x4 NH The section determines intervention for the malaria model (1) that would halt the transmission of the disease. The triplet interventions u1 t , u2 t , u3 t are identified such that ∂2 f9 ∂2 f9 w = = αβ2 d 3 v9 3 w8 ∂x5 ∂x8 ∂x8 ∂x5 NH ∂2 f9 ∂2 f9 w = = αβ2 d 4 v9 3 w8 ∂x6 ∂x8 ∂x8 ∂x6 NH • u1 t is the bednet usage of the susceptible human to derive protection from a mosquito bite. • u2 t is the treatment of the infected humans. • u3 t is the elimination intervention of the vector through insecticide spray. Hence, w9 w w w1 + αβ1 η2 v3 10 w1 + αβ2 d1 v9 3 w8 NH NH NH w3 w3 w + αβ2 d 2 v9 w8 + αβ2 d 3 v9 w8 + αβ2 d4 v9 3 w8 NH NH NH a = 2 αβ1 η1 v3 Now, it follows that deriving b using Equation (31), we get ∂ f3 Λa = v3 η1 w9 ∂x9 ∂β1 ϱ1 N H 2 ∂2 f3 Λa = v3 η2 w10 ∂x10 ∂β1 ϱ1 N H Thus, b = v3 η1 w9 b = v3 Λa Λa + v3 η2 w10 ϱ1 N H ϱ1 N H Λa η w + η2 w10 ϱ1 N H 1 9 From the computations, b is positive as conventionally the case. The result of a determines the dynamics of the malaria model (1) around D0f . From [50], the malaria model (1) will With the intervention of u1 t , u2 t , u3 t identified for the malaria model (1), the structured nonautonomous malaria intervention model becomes d η E + η2 I V SH S = Λa − ϕ1 SH − μδ SH − 1 − u1 αβ1 1 V NH dt H d V = ϕ1 SH − ϕ2 V H − μδ V H dt H d η E + η2 I V E = 1 − u1 αβ1 1 V SH − ψa + μδ EH dt H NH d A = ψa EH − ϕa AH − δ1 AH − μδ AH dt H d I = ϕa AH − δ2 I H1 − σa I H1 − μδ I H1 − u2 I H1 dt H1 d I = σa I H1 − γa I H2 − σ1 I H2 − μδ I H2 − u2 I H2 dt H2 d R = γa I H2 + δ1 AH + δ2 I H1 + ϕ2 V H + u2 I H1 + u2 I H2 − μδ RH dt H d d E + d2 AH + d 3 I H1 + d4 I H2 SV − u3 SV S = Λb − μd SV − 1 − u1 αβ2 1 H NH dt V d d E + d2 AH + d3 I H1 + d 4 I H2 SV − qm EV − μd EV − u3 EV E = 1 − u1 αβ2 1 H NH dt V d I = qm EV − μd I V − u3 I V dt V 32 18 Journal of Applied Mathematics ×105 9 8 7 6 EH 5 4 3 2 1 0 0 20 40 60 Time (days) 80 = 0.059 1 = 0.759 1 = 0.259 1 = 0.959 1 100 1 = 0.559 (a) Numerical trajectory depicting vaccine impact on the exposed humans 8 ×104 7 6 AH 5 4 3 2 1 0 0 20 40 60 80 Time (days) = 0.059 1 = 0.759 1 = 0.259 1 = 0.959 1 1 = 0.559 (b) Numerical trajectory depicting vaccine impact on the asymptomatic humans Figure 6: Continued. 100 Journal of Applied Mathematics 2.5 19 ×105 2 IH1 1.5 1 0.5 0 0 40 20 60 80 100 Time (days) 1 = 0.059 1 = 0.759 1 = 0.259 1 = 0.959 1 = 0.559 (c) Numerical trajectory depicting vaccine impact on the mildly infected humans 10000 9000 8000 7000 IH2 6000 5000 4000 3000 2000 1000 0 0 20 40 60 Time (days) 1 = 0.059 1 = 0.759 1 = 0.259 1 = 0.959 1 = 0.559 80 100 (d) Numerical trajectory depicting vaccine impact on the severely infected humans Figure 6: Numerical trajectory depicting vaccine impact on the exposed, asymptomatic, mildly, and severely infected humans. The target of intervention model (32) is to minimize the number of infected human compartments and eradicate the various phases of the vector while minimizing the expense associated with putting the identified interventions into practice. As a result, the objective functional (33) is minimized under the constraints of (32), a nonautonomous equation. 20 Journal of Applied Mathematics J= and T H 1 EH + H 2 AH + H 3 I H1 + H 4 I H2 0 + H 5 SV + EV + I V + 1 h u2 + h2 u22 + h3 u23 2 1 1 33 dt Equation (33) integrand has coefficients of the state variables which serve as balancing coefficients that measure the intervention cost on the interval 0, T . We seek an optimal control ui , for i = 1, ⋯, 3 such that J u∗1 , u∗2 , u∗3 = min J u1 , u2 , u3 U 34 In connection with minimizing the objective functional (33) to the model system (32), the Pontryagin maximum principle [51] converts the (33) and (32) into a minimization problem and finds its solution. We let S∗H , V ∗H , E∗H , A∗H , I ∗H1 , I ∗H2 , R∗H , S∗V , E∗V , and I ∗V denote the state variable and u1 t , u2 t and u3 t the related controls. The existence of an optimal control problem is shown as follows: System (32) is structured into the form X ′ = G1 X + G2 u, X G1 = 35 −ϱ1 0 0 0 0 0 0 0 0 0 ϕ1 −ϱ2 0 0 0 0 0 0 0 0 0 0 −ϱ3 0 0 0 0 0 0 0 0 0 ψa −ϱ4 0 0 0 0 0 0 0 0 0 ϕa −ϱ5 − u2 0 0 0 0 0 0 0 0 0 σa −ϱ6 − u2 0 0 0 0 0 ϕ2 0 δ1 δ2 + u2 γa + u2 −μδ 0 0 0 0 0 0 0 0 0 0 −μd − u3 0 0 0 0 0 0 0 0 0 0 −ϱ7 − u3 0 0 0 0 0 0 0 0 0 qm −μd − u3 Considering Equation (35), becomes G2 u, X 1 − G2 u, X 2 ≤2 η1 + η2 1 − u1 αβ1 SH 1 − SH 2 + 2 d 1 + d 2 + d 3 + d 4 1 − u1 αβ2 SV 1 − SV 2 + 2 1 − u1 αβ1 η1 EV 1 − EV 2 + 2 1 − u1 αβ1 η1 I V 1 − I V 2 + 2 1 − u1 αβ2 d 1 η1 EH 1 − EH 2 + 2 1 − u1 αβ2 d 2 η1 AH 1 − AH 2 + 2 1 − u1 αβ2 d 3 η1 I H 11 − I H 21 + 2 1 − u1 αβ2 d4 η1 I H 21 − I H 22 where 36 SH and VH G1 X 1 − G1 X 2 ≤ ϱ1 + ϕ1 EH + ϱ3 + ψ a AH X= I H1 I H2 SH 1 − SH 2 + ϱ2 + ϕ2 E H 1 − E H 2 + ϱ4 + ϕ a + δ 1 + ϱ5 + σa + δ2 + 2u2 + ϱ6 + γa + 2u2 , G2 u, X RH V H1 − V H2 AH 1 − AH 2 I H 11 − I H 12 I H 21 − I H 22 + μδ RH 1 − RH 2 + μd + u 3 S V 1 − S V 2 + ϱ 7 + qm + u 3 + μd + u 3 IV1 − IV2 EV 1 − EV 2 SV 37 EV IV η1 E V + η2 I V SH NH Λa − 1 − u1 αβ1 0 1 − u1 αβ1 = Λb − 1 − u1 αβ2 1 − u1 αβ2 η1 E V + η2 I V SH NH Following Equations (36) and (37), the entire system K X = G1 X + G2 u, X is given by ≤2 η1 + η2 + ϱ1 + ϕ1 1 − u1 αβ1 SH 1 − SH 2 + 2 d 1 + d 2 + d 3 + d4 + μd + u3 1 − u1 αβ2 SV 1 − SV 2 0 + 2 1 − u1 ϱ7 + qm + u3 αβ1 η1 EV 1 − EV 2 0 + 2 1 − u1 μd + u3 αβ1 η1 I V 1 − I V 2 0 + 2 1 − u1 ϱ3 + ψa αβ2 d 1 η1 EH 1 − EH 2 d 1 EH + d 2 AH + d 3 I H1 + d 4 I H2 SV NH d 1 EH + d 2 AH + d 3 I H1 + d 4 I H2 SV NH 0 + 2 1 − u1 ϱ4 + ϕa + δ1 αβ2 d2 η1 AH 1 − AH 2 + 2 1 − u1 ϱ6 + γa + 2u2 αβ2 d3 η1 I H 11 − I H 21 + 2 1 − u1 ϱ5 + σa + δ2 + 2u2 αβ2 d 4 η1 I H 21 − I H 22 + μδ RH 1 − RH 2 + ϱ2 + ϕ2 V H 1 − V H 2 Journal of Applied Mathematics Hence, K X 1 − K X 2 ≤ A1 SH 1 − SH 2 + A2 SV 1 − SV 2 + A3 EV 1 − EV 2 + A4 I V 1 − I V 2 + A5 EH 1 − EH 2 + A6 AH 1 − AH2 + A7 I H 11 − I H 21 + A8 I H 21 − I H 22 + A9 RH 1 − RH 2 + A10 V H 1 − V H 2 ≤A SH 1 − SH 2 + SV 1 − SV 2 + EV 1 − EV 2 + I V 1 − I V 2 + EH 1 − EH2 + AH 1 − AH 2 + I H 11 − I H 21 + I H 21 − I H 22 + RH 1 − RH 2 + V H1 − V H2 It follows that A is a nonnegative constant which is independent of the state variable such that A = max A1 , A2 , A3 , ⋯, A10 where A1 = 2 η1 + η2 + ϱ1 + ϕ1 1 − u1 αβ1 21 φ′3 = φ3 − φ5 ϕa + φ3 − φ7 δ1 + μδ φ3 d + φ8 − φ9 1 − u1 αβ2 2 SV − H 2 NH d φ4′ = φ4 − φ3 ψa + μδ φ4 + φ8 − φ9 1 − u1 αβ2 1 SV − H 1 NH φ5′ = φ5 − φ6 σa + φ5 − φ7 δ2 + φ5 − φ7 u2 d + μδ φ5 + φ8 − φ9 1 − u1 αβ2 3 SV − H 3 NH φ6′ = φ6 − φ7 γa + φ6 − φ7 u2 + σ1 + μδ φ6 d + φ8 − φ9 1 − u1 αβ2 4 SV − H 4 , NH φ7′ = μδ φ7 φ8′ = μd φ8 + u3 φ8 + φ8 − φ9 1 − u1 αβ2 d1 EH + d 2 AH + d3 I H1 + d4 I H2 − H5 NH φ′9 = μd φ9 + φ9 − φ10 qm + u3 φ9 η1 S − H5 + φ1 − φ4 1 − u1 αβ2 NH V ′ = μd φ10 + u3 φ10 + φ1 − φ4 1 − u1 αβ2 φ10 η2 S − H5 NH V A2 = 2 d1 + d2 + d 3 + d 4 + μd + u3 1 − u1 αβ2 38 A3 = 2 1 − u1 ϱ7 + qm + u3 αβ1 η1 A4 = 2 1 − u1 μd + u3 αβ1 η1 with transversality conditions A5 = 2 1 − u1 ϱ3 + ψa αβ2 d1 η1 φ j T = 0, j ∈ 1, 2, ⋯, 10 A6 = 2 1 − u1 ϱ4 + ϕa + δ1 αβ2 d 2 η1 39 A7 = 2 1 − u1 ϱ6 + γa + 2u2 αβ2 d 3 η1 A8 = 2 1 − u1 ϱ5 + σa + δ2 + 2u2 αβ2 d4 η1 u1′ t = min 1, max 0, ϑ1 A9 = μδ u2′ t = min 1, max 0, ϑ2 A10 = ϱ2 + ϕ2 u3′ t = min 1, max 0, ϑ3 Furthermore, K X 1 − K X 2 ≤ Γ K 1 − K 2 , with Γ = max J, L < ∞. Therefore, A K is uniformly Lipschitz continuous. Hence, the malaria model (1) has a solution that exists. Now the method [51] is applied which converts the malaria model (1) and (33) into the minimization of H m subject to u1 , u2 , u3 . where η1 EV + η2 I V SV N H h1 d E + d 2 AH + d3 I H1 + d4 I H2 SV + φ9 − φ8 αβ2 1 H N H h1 ϑ1 = φ4 − φ1 αβ1 Theorem 8. Suppose condition (34) is satisfied by the control triplets ui , for, i = 1, ⋯, 3, then the adjoint variable φ j exists which satisfy the underlying adjoint system; φ1′ = φ1 − φ4 1 − u1 αβ1 + φ1 − φ2 ϕ 1 + μ δ φ1 φ′2 = φ2 − φ7 ϕ2 + μδ φ2 40 η1 E V + η2 I V NH ϑ 2 = φ5 − φ 7 ϑ3 = I H1 I + φ6 − φ7 H2 h2 h2 φ8 φ φ SV + 9 EV + 10 I V h3 h3 h3 41 22 Journal of Applied Mathematics The controls ui , for, i = 1, ⋯, 3 are characterised as presented in the given equation: Proof 6. The Hamiltonian (42) given by H m = H 1 EH + H 2 AH + H 3 I H1 + H 4 I H2 + H 5 SV + EV + I V ∂H m =0 ∂u1 + φ1 Λa − ϕ1 SH − μδ SH − 1 − u1 αβ1 ∂H m =0 ∂u2 η1 E V + η2 I V SH + φ2 ϕ1 SH − ϕ2 VH − μδ VH NH + φ3 ψa EH − ϕa AH − δ1 AH − μδ AH η E + η2 I V SH − ψa + μδ EH + φ4 1 − u1 αβ1 1 V NH + φ5 ϕa AH − δ2 I H1 − σa I H1 − μδ I H1 − u2 I H1 + φ6 σa I H1 − γa I H2 − σ1 I H2 − μδ I H2 − u2 I H2 + φ7 γa I H2 + δ1 AH + δ2 I H1 + ϕ2 V H + u2 I H1 + u2 I H2 − μδ RH + φ8 Λb − μd SV − 1 − u1 αβ2 d1 EH + d2 AH + d3 I H1 + d4 I H2 SV − u3 SV NH d E + d2 AH + d3 I H1 + d4 I H2 SV + φ9 1 − u1 αβ2 1 H NH − qm EV − μd EV − u3 EV + φ10 qm EV − μd I V − u3 I V 42 is explored to deduce the adjoint system (38). We partially differentiate (42) subject to the state variables given by d ∂H m φ =− ∂SH dt 1 d ∂H m φ2 = − ∂V H dt d ∂H m φ =− ∂EH dt 3 d ∂H m φ =− ∂AH dt 4 d ∂H m φ5 = − ∂I H1 dt d ∂H m φ =− ∂I H2 dt 6 d ∂H m φ7 = − ∂RH dt d ∂H m φ =− ∂SV dt 8 d ∂H m φ9 = − ∂EV dt d ∂H m φ =− ∂I V dt 10 43 ∂H m =0 ∂u3 Using standard argument, the characterization is done by employing bounds such as u∗i = 0 if ϑ∗i ≤ 0 ϑ∗i if 0 ≤ ϑ∗i ≤ 1 1 if ϑ∗i ≥ 1 44 4.1. Numerical Simulation. With the aid of numerical examples to complement the analytic analysis, the method, forward-backwards sweep, propounded by [52] is applied to generate simulated graphs of the malaria model (32). The optimality control simulated graphs are compared to the noncontrol graph for comparative analysis to be made. To understand the dynamics of the control strategies on the model, we explored the scenario of pairing different strategies to assess their impact on mitigating the spread of the epidemic. The simulated graphs were generated with the widely known scheme, and the fourth order Runge– Kutta was employed to solve the numerical model’s (32) optimality system. The scheme solves the adjoint system (38) backwards in time and system (32) forward in time. With a specified interval t ∈ 0,100 , chosen initial conditions and the parameter values of Table 2, the iterative scheme solves the optimality system, considering the associated transversality condition. Further, the coefficients of the state variable targeted for minimizing in the objective functional (33) are chosen arbitrarily as H 1 = H 2 = H 3 = H 4 = H 5 = 10, h1 = 5, h2 = 10, and h3 = 8. h2 which represents the treatment intervention is considered to be greater than h1 and h3 since it involves diagnosis and treatment cost. Further, h3 is assumed to be greater than h1 since it may involve the cost of insecticide and spraying. 4.2. A: The Intervention of u1 and u2 . To advance our understanding of the dynamics of the malaria model (1), the interventions of u1 and u2 are considered to generate graphical solutions of the control model (32) and a comparative analysis is made with the noncontrol model (1). From the analysis, we noted that the exposed human’s noncontrol graph of Figure 7(a) quickly rises in the early days to 8 8 × 105 in 3 days and gradually decreased and wiped out of the population in 90 days. The noncontrol asymptomatic human’s graphs of Figure 7(b) rocketed to 6 9 × 104 in 5 days and swiftly lowered as it degenerated from the population in 90 days. The mildly infected human’s graph of Figure 7(c) Journal of Applied Mathematics 23 Table 2: Model 1: parameters and source with days as time. Parameter Values Source Parameter Values Source a 0 0696,0 5 [20, 39, 53] ϕa 0 31 Assumed ϕ1 0 01,0 1 [39] σa 0 03 Assumed d1 , d2 , d3 , d4 0 1,1 [37, 54] γa 0 4071 Assumed η1 , η2 0 01,0 1 [20, 54] σ1 0 0004,0 2 [39, 55] Λa 100, 1000 [20] δ 1 , δ2 0 01,1 [20] β1 0 021,0 6 [24, 54, 56] μδ 0 0000548 [37] β2 0 1,0 5 [24, 54, 56] Λb 50 [57] ψa 0 06 [57] qm 0 27 [58] ϕ2 0 15 Assumed μd 0 05,0 3 [22, 39, 58] was picked from zero and gently moved to 17 6 × 104 in 18 days. It then changed its course and began to decline smoothly to 0 8 × 104 in 100 days. The severely infected noncontrol human’s graph of Figure 7(d) gently moved from zero to 8 7 × 103 in 20 days and smoothly lowered afterwards to 0 8 × 103 in 100 days. The susceptible mosquito graph of Figure 7(e) declined speedily to zero in 20 days. The noncontrol exposed mosquito graph of Figure 7(f) swiftly increased from 1 0 × 1053 to 2 5 × 103 in 2 days and then quickly dropped to zero in 20 days. The infected graph of Figure 7(g) steadily picked from 1 0 × 103 to 1 36 × 103 in 5 days and sharply decreased to zero in 30 days. The control-generated graphs of the intervention of u1 and u2 produced the desired results. The exposed human graph slowly decreased from 8 0 × 105 to zero in 100 days but stayed below the noncontrol graph. The asymptomatic depicted a similar pattern but lay below the noncontrol throughout the simulated time. The mildly infected control human’s graph took the same pattern but could only raise a little about 2 0 × 104 . The graph slowly lowered from that level and decreased to zero in 60 days. The severely infected control human’s graph depicted the noncontrol graph and slowly raised to 0 8 × 103 in the early days but became greatly minimized afterwards. The control susceptible mosquito graph reached equilibrium with the noncontrol and lowered in the same pattern to zero in 20 days. The exposed mosquito control graph mimicked the noncontrol and raised gently to 1 3 × 103 in 2 days but gradually lowered to zero after day 2. The control infected mosquito graph dropped gently from 1 0 × 103 to 9 30 × 102 in 2 days and gradually decreased to zero in 30 days depicting the noncontrol graph as observed in graphs of Figure 7. Figure 7(h) is the control profile plot generated using intervention u1 and u2 . From the graph, we observed that both u1 and u2 stayed on the top bound till 100 days when they dropped to the lower bound. 4.3. B: The Intervention of u1 and u3 . The intervention of u1 and u3 is considered to provide detailed information on the dynamics of the control model (32) generated solution to the noncontrol solution. We observed from the simulated plots that the noncontrol exposed human’s graph of Figure 8(a) rose quickly to 8 8 × 105 in the first 3 days and fell smoothly afterwards to zero in 90 days. The asymptomatic human’s graph of Figure 8(b) soured from 0 3 × 104 to 6 9 × 104 in 5 days and slowly declined to zero in 90 days. The noncontrol mildly infected human’s graph of Figure 8(c) smoothly picked from zero and soured to 17 6 × 104 in 18 days. The dynamic behaviour of the graph changed after 18 days, and it began to decrease gradually to 0 8 × 104 at the final time. The severely infected human’s graph of Figure 8(d) moved from zero to 8500 in 20 days and fell through to 450 at the final simulated time. The susceptible noncontrol mosquito graph of Figure 8(e) continuously declined from 12 × 106 to zero in 10 days and remained there for the rest of the simulated time. The exposed noncontrol graph of Figure 8(f) steadily rose early to plummet to 2500 in 3 days. The graph then decreased speedily to zero in 25 days and stayed there for the rest of the simulated time. The infected mosquito graph of Figure 8(g) rose to 1350 in 5 days and then fell to zero in 30 days. However, with the intervention of u1 and u3 , different dynamic behaviour was obtained. The intervention caused the control exposed graph to decrease from 12 × 106 to zero in 80 days, but the graph stayed below the noncontrol graph throughout the simulated time. The asymptomatic control human’s graph mimicked the noncontrol graph but stayed below it. The mildly infected control human’s graph, taking the same pattern as the noncontrol moved from zero to 12 3 × 104 in 18 days. It then decreased slowly to 0 8 × 104 at the final simulated time. The severely infected control graph depicted the noncontrol graph and moved from zero to 6000 in 20 days. The graph proceeded after 20 days and dropped slowly to 300 at the final time. The control susceptible graph dropped sharply to hit zero in 8 days and stayed there for the remaining time. Further, the control exposed graph quickly fell from 1000 to zero in 8 days, staying below the noncontrol graph. The control infected graph swiftly dropped from 1000 to zero in 8 days, remaining below the noncontrol graph as seen in the graphs of Figure 8. Finally, Figure 8(h) is the control profile plot generated using intervention of u1 and u3 . From the graph, u1 and u3 both stayed in the upper limit until 100 days when it dropped to the lower limit. 24 Journal of Applied Mathematics 9 ×105 8 7 6 EH 5 4 3 2 1 0 0 20 40 60 80 100 80 100 Time (days) Without control With control (a) Substate evolution of the exposed humans 8 ×10 4 7 6 AH 5 4 3 2 1 0 0 20 40 60 Time (days) Without control With control (b) Substate evolution of the asymptomatic humans Figure 7: Continued. Journal of Applied Mathematics 25 ×105 2 1.8 1.6 1.4 IH1 1.2 1 0.8 0.6 0.4 0.2 0 0 20 40 60 80 100 Time (days) Without control With control (c) Substate evolution of the mildly infected humans 10000 9000 8000 7000 IH2 6000 5000 4000 3000 2000 1000 0 0 20 40 60 Time (days) Without control With control (d) Substate evolution of the severely infected humans Figure 7: Continued. 80 100 26 Journal of Applied Mathematics ×106 12 10 SV 8 6 4 2 0 0 20 40 60 80 100 80 100 Time (days) Without control With control (e) Substate evolution of the susceptible mosquitoes 2500 2000 EV 1500 1000 500 0 0 20 40 60 Time (days) Without control With control (f) Substate evolution of the exposed mosquitoes Figure 7: Continued. Journal of Applied Mathematics 27 1800 1600 1400 1200 IV 1000 800 600 400 200 0 0 20 40 60 80 100 Time (days) Without control With control (g) Substate evolution of the infected mosquitoes 0.75 0.7 0.65 0.6 0.55 0.5 0.45 0.4 0.35 0.3 0.25 0 20 40 60 80 Time (days) u1 u2 (h) Control profile Figure 7: Substate evolution generated with u1 ≠ 0 and u2 ≠ 0. 100 28 Journal of Applied Mathematics 9 ×105 8 7 6 EH 5 4 3 2 1 0 0 20 40 60 80 100 80 100 Time (days) Without control With control (a) Substate evolution of the exposed humans 8 ×104 7 6 AH 5 4 3 2 1 0 0 20 40 60 Time (days) Without control With control (b) Substate evolution of the asymptomatic humans Figure 8: Continued. Journal of Applied Mathematics 2 29 ×105 1.8 1.6 1.4 IH1 1.2 1 0.8 0.6 0.4 0.2 0 0 40 20 60 80 100 Time (days) Without control With control (c) Substate evolution of the mildly infected humans 10000 9000 8000 7000 IH2 6000 5000 4000 3000 2000 1000 0 0 40 20 60 Time (days) Without control With control (d) Substate evolution of the severely infected humans Figure 8: Continued. 80 100 30 Journal of Applied Mathematics 6 12 ×10 10 SV 8 6 4 2 0 0 40 20 60 80 100 80 100 Time (days) Without control With control (e) Substate evolution of the susceptible mosquitoes 2500 2000 EV 1500 1000 500 0 0 20 40 60 Time (days) Without control With control (f) Substate evolution of the exposed mosquitoes Figure 8: Continued. Journal of Applied Mathematics 31 1800 1600 1400 1200 IV 1000 800 600 400 200 0 0 40 20 60 80 100 Time (days) Without control With control (g) Substate evolution of the infected mosquitoes 0.75 0.7 0.65 0.6 0.55 0.5 0.45 0.4 0.35 0.3 0.25 0 20 40 60 80 Time (days) u1 u3 (h) Control profile Figure 8: Substate evolution generated with u1 ≠ 0 and u3 ≠ 0. 100 32 4.4. C: The Intervention of u2 and u3 . A comparative analysis involving the intervention of the control u2 and u3 of the control model (32) to the noncontrol model (1) is made to elucidate the dynamic behaviour of the disease. The investigation indicated that the exposed noncontrol human’s graph of Figure 9(a) rose steadily in the early days to 8 8 × 105 and decreased gradually until it entirely seemed to have been wiped out of the population at the final time. The asymptomatic noncontrol graph of Figure 9(b) swiftly raised to 6 9 × 104 in 5 days and changed its direction to fall gradually to zero in 100 days. The mildly infected noncontrol graph of Figure 9(c) moved from zero to 17 5 × 104 in 18 days and then decreased gradually to 0 9 × 104 at the final time. The severely infected noncontrol graph of Figure 9(d) picked from zero and steadily increased to 8500 in 20 days. The graph then decreased gradually to 400 at the final simulated time. The susceptible noncontrol mosquito graph of Figure 9(e) dropped from 12 × 106 to zero in 20 days and remained there for the rest of the simulated time. The exposed noncontrol mosquito graph of Figure 9(f) sharply rose from 1000 to 2500 in 3 days and suddenly fell to zero in 20 days. The infected noncontrol mosquito graph of Figure 9(g) picked from 1000 to 1350 in 5 days and then lowered gradually till it hit zero in 30 days. The execution of the intervention of the control u2 and u3 generated graphs with different dynamic behaviour. The control exposed human graph decreased right from 8 0 × 105 and progressed steadily to zero at the final time. The control asymptomatic human graph took a similar pattern as the noncontrol and increased from 0 3 × 104 to 5 3 × 104 in 5 days. The graph changed its dynamic behaviour and lowered gradually after 5 days to zero but stayed below the noncontrol graph for the simulated time. The mildly controlled infected human graph slightly increased similarly to the noncontrol graph but was greatly minimized. In addition, the severely controlled infected human graph depicted the noncontrol and increased for the 5 days and declined afterwards. The control susceptible mosquito graph dropped sharply in the first 20 to meet the noncontrol and maintained that level for the simulated time. The control exposed mosquito graph took the same pattern as the noncontrol but declined sharply to hit zero at 6. The control infected mosquito graph dropped swiftly from 1000 to zero in 10 days as noticed in the graphs of Figure 9. Figure 9(h) is the control profile of the model using the intervention of u2 and u3 . The result of the graph and the intervention of u2 and u3 should not be relaxed for the entire simulated time. 4.5. D: The Intervention of u1 , u2 , and u3 . Finally, to further boost management decision-makers with an advanced understanding of the malaria 1 disease’s dynamics, we employed all three interventions of the control model (32) and circumspectly experimented with them to generate simulated plots to support the analytic investigation. From the simulation, we observe that the noncontrol exposed human’s graph of Figure 10(a) slightly increased from 8 0 × 105 to 8 8 × 105 in 3 days and gradually lowered after 3 days to zero at the final time. The asymptomatic noncontrol human’s Journal of Applied Mathematics graph of Figure 10(b) steadily raised from 0 4 × 104 to 6 9 × 104 in 5 days and slowly declined to zero at the end of the simulated time. The mildly infected noncontrol graph of Figure 10(c) increased from zero to 17 5 × 104 in 18 days and then reduced gradually to 0 8 × 104 at the final time. The severely infected noncontrol human’s graph of Figure 10(d) continuously increased from zero to 8500 in 20 days and dropped slowly to 400 at the final time. The susceptible noncontrol mosquito graph of Figure 10(e) dropped speedily to zero in 20 days from 12 × 106 and maintained that level for the remaining time. The exposed noncontrol mosquito graph of Figure 10(f) sharply increased from 1000 to 2500 in 3 days and then swiftly dropped to zero in 20 days. It then stayed at zero for the remaining time. The noncontrol infected mosquito graph of Figure 10(g) moved from 1000 to 1350 in 5 days and then changed the dynamics and began to decrease. The graph progressed from 1350 to zero within 25 days. The intervention of u1 , u2 , and u3 reverted the dynamic behaviour of the disease. We noted that the control exposed human’s graph decreased right from day 1 and progressed steadfastly to zero in 100 days. The control asymptomatic graph mimicked the noncontrol graph and moved from 0 4 × 104 to 4 4 × 104 in 3 days, and then gradually decreased to zero in 100 days. The mildly infected control human’s graph depicted the behaviour of the noncontrol graph and slowly decreased to zero in 100 days. The severely infected control human’s graph moves slightly to 500 in 5 days and gently decreases to zero in 100 days. The control susceptible mosquito graph declined sharply in the first 5 days to zero and maintained the level for the simulated time. The control exposed mosquito graph dropped from 1000 to zero in 8 days and stayed there for the related time. The control infected mosquito graph swiftly dropped from 100 to zero in 8 days and stayed at that level to meet the noncontrol graph t = 30 as depicted by the graphs of Figure 10. Figure 10(h) is the control profile diagram generated using the three controls. From the graph, we observed that the three controls remained at the upper limit before dropping to the lower limit at the final time. 5. Cost-Effective Analysis Cost-effective analysis is a method used to determine which among the available interventions is the most cost-effective in terms of achieving the desired outcomes. The analysis is conducted to let decision-makers make informed decisions about which interventions or treatments to prioritize based on their budget and desired outcomes. By the cost-effective analysis, we can determine the cost-effectiveness of each considered intervention by comparing the costs and outcomes [59–62]. The section engages the method of ACER (average cost-effectiveness ratio) and ICER (incremental cost-effectiveness ratio) to make a judgment of the most cost-effective intervention of the proposed interventions to tackle the malaria epidemic by comparing the costs and performances of the interventions. The ACER gives the total cost of an intervention to the prevented infections by the intervention. Further, considering two interventions of p1 Journal of Applied Mathematics 9 33 ×105 8 7 6 EH 5 4 3 2 1 0 0 20 40 60 80 100 80 100 Time (days) Without control With control (a) Substate evolution of the exposed humans 4 8 ×10 7 6 AH 5 4 3 2 1 0 0 20 40 60 Time (days) Without control With control (b) Substate evolution of the asymptomatic humans Figure 9: Continued. 34 Journal of Applied Mathematics 2 ×105 1.8 1.6 1.4 IH1 1.2 1 0.8 0.6 0.4 0.2 0 0 40 20 60 80 100 Time (days) Without control With control (c) Substate evolution of the mildly infected humans 10000 9000 8000 7000 IH2 6000 5000 4000 3000 2000 1000 0 0 40 20 60 Time (days) Without control With control (d) Substate evolution of the severely infected humans Figure 9: Continued. 80 100 Journal of Applied Mathematics 35 6 12 ×10 10 SV 8 6 4 2 0 0 40 20 60 80 100 80 100 Time (days) Without control With control (e) Substate evolution of the susceptible mosquitoes 2500 2000 EV 1500 1000 500 0 0 40 20 60 Time (days) Without control With control (f) Substate evolution of the exposed mosquitoes Figure 9: Continued. 36 Journal of Applied Mathematics 1800 1600 1400 1200 IV 1000 800 600 400 200 0 0 40 20 60 80 100 Time (days) Without control With control (g) Substate evolution of the infected mosquitoes 0.75 0.7 0.65 0.6 0.55 0.5 0.45 0.4 0.35 0.3 0.25 0 20 40 60 80 Time (days) u1 u2 u3 (h) Control profile Figure 9: Substate evolution generated with u2 ≠ 0 and u3 ≠ 0. 100 Journal of Applied Mathematics 9 37 ×105 8 7 6 EH 5 4 3 2 1 0 0 20 40 60 80 100 80 100 Time (days) Without control With control (a) Substate evolution of the exposed humans 8 ×104 7 6 AH 5 4 3 2 1 0 0 20 40 60 Time (days) Without control With control (b) Substate evolution of the asymptomatic humans Figure 10: Continued. 38 Journal of Applied Mathematics 2 ×105 1.8 1.6 1.4 IH1 1.2 1 0.8 0.6 0.4 0.2 0 0 40 20 60 80 100 Time (days) Without control With control (c) Substate evolution of the mildly infected humans 10000 9000 8000 7000 IH2 6000 5000 4000 3000 2000 1000 0 0 40 20 60 Time (days) Without control With control (d) Substate evolution of the severely infected humans Figure 10: Continued. 80 100 Journal of Applied Mathematics 12 39 ×106 10 SV 8 6 4 2 0 0 40 20 60 80 100 80 100 Time (days) Without control With control (e) Substate evolution of the susceptible mosquitoes 2500 2000 EV 1500 1000 500 0 0 40 20 60 Time (days) Without control With control (f) Substate evolution of the exposed mosquitoes Figure 10: Continued. 40 Journal of Applied Mathematics 1800 1600 1400 1200 IV 1000 800 600 400 200 0 0 40 20 60 80 100 Time (days) Without control With control (g) Substate evolution of the infected mosquitoes 0.75 0.7 0.65 0.6 0.55 0.5 0.45 0.4 0.35 0.3 0.25 0 20 40 60 80 Time (days) u1 u2 u3 (h) Control profile Figure 10: Substate evolution with u1 ≠ 0, u2 ≠ 0, and u3 ≠ 0. 100 Journal of Applied Mathematics 41 Table 3: Infections prevented in order of increasing magnitude. Total infection averted ( × 107 ) Total cost ( × 103 ) ACER ICER B 35343 3.6579 1 035 × 10−8 1 035 × 10−8 A 40727 4.2199 1 036 × 10−8 1 044 × 10−8 C 40786 5.0625 1 241 × 10−8 1 428 × 10−6 D 40803 6.4702 1 586 × 10−8 8 280 × 10−6 Intervention and p2 , the ICER is the difference in cost of p1 and p2 to the difference in the infection prevented by the intervention. Thus, ICER = Difference in costs of control strategies p1 and p2 Difference in infection averted by the strategies 45 Table 3 provides the infections prevented by the named interventions ranked in increasing order of magnitude. To find the most cost-effective intervention, a comparative analysis of the ACER’s values of the interventions must be made. The intervention with the least ACER value is the most cost-effective. By inspection, intervention B is the most cost-effective intervention. However, intervention D has the biggest ACER value, making it the least cost-effective intervention. But to decide on which intervention to discard, further detailed analysis needs to be carried out. Hence, we compute the ICERs of the interventions for further probing. From the ICER computations, we observe that intervention D has the biggest ICER value. Hence, it is discarded from the table and further analysis is made on the remaining interventions. The underlying analyses are made in Table 4 Now, a further dive into the analysis from Table 4 shows that intervention A has the biggest ICER value than B. Hence, intervention A is deleted from the entries of Table 4. It follows that a new table is constructed in that regard. Following the computation in Table 5, we deduce that intervention C has a bigger ICER value than B. Hence, we delete intervention C from Table 5. B therefore is the most cost-effective intervention, providing the optimum performance with the least cost. 6. Conclusion The research studied a nonlinear differential equation malaria model to assess the impact of vaccines on the control of the disease. The research analysed the model and characterized its properties of positivity and boundedness. The asymptotic dynamic behaviour of the disease at the model’s equilibria was studied. Further, bifurcation analysis was conducted to study the local dynamic behaviour of the malaria model (1) at the malaria-free equilibrium. The investigation indicated that malaria model (1) exhibits forward bifurcation. Further, with the model’s input and initial conditions, sensitivity analysis was investigated to quantify the amount of influence each parameter has on R0 . The Table 4: Infections prevented in order of magnitude of interventions B, A, and C. Total infection averted ( × 107 ) Total cost ( × 103 ) ICER B 35343 3.6579 1 035 × 10−8 A 40727 4.2199 1 044 × 10−8 C 40786 5.0625 1 428 × 10−6 Intervention Table 5: Infections prevented in order of magnitude of interventions B and C. Total infection averted ( × 107 ) Total cost ( × 103 ) ICER B 35343 3.6579 1 035 × 10−8 C 40786 5.0625 1 428 × 10−6 Intervention influences of α, β1 , β2 , ψa and μδ on R0 are depicted in Figure 5. We observe that the R0 changes with a change in any of the given parameters. From Figure 5(a), we note that when α is significantly small, the disease can be mitigated even when μδ = 1. However, when α ≥ 1, the disease cannot be mitigated with μδ ≤ 0 1. In Figure 5(b), we see that the disease can be mitigated when β1 is small. Thus, when β1 is small, irrespective of the value of ψa , the disease could be eliminated. In addition, we observe in Figure 5(c) that the influence of β2 on R0 is great. Thus when ψa ≥ 1, the disease can be eliminated when β2 is small. But when β2 is big, the disease cannot be mitigated. Hence, α, β1 , and β2 have a greater influence on the R0 , and minimizing them would be a prudent initiative by stakeholders. Furthermore, the variability in R0 was assessed by the LHS-PRCC. With the method, the uncertainty in R0 is computed with a 95% confidence interval, with the mean, and 5th and 95th percentiles, respectively, simulated as 0 143788, 0 01545, and 0 41491. In addition, the bifurcation type invoked at the disease-free state is analysed and the result revealed that the convention that R0 < 1 is the condition for eradicating the disease is not always sufficient when the system undergoes backward bifurcation. The presence of backward bifurcation means that the system is characterized by a coexistence of stable endemic and disease-free equilibria even when R0 < 1. In such circumstances, the infection needs to be dealt with at the early stages else it becomes difficult to control once the transmission begins to get out of control. 42 Moreover, we formulated an intervention model to assess the respective effects of the various pairings of interventions on the dynamics of the disease. Lastly, an intervention cost analysis was conducted to identify the most cost-effective intervention regarding rewarding the desired outcome. From the analysis, intervention B was found to be the most cost-effective intervention. As recommended by the cost analysis, public health, in their effort to mitigate malaria in our communities, should target advocating and making insecticide nets available to the communities for easy access. In addition, areas in the community which serve as a hiding place for the vector should be targeted for spraying to control the vector. Furthermore, as confirmed by the vaccine analysis in Subsection 3.7, vaccines can assist in closing the gap that has not been fixed by the existing interventions. In addition, vaccines can help minimize the overall disease burden and incidence, hospitalization, and death from the disease especially in children. Hence, a vaccination program with a proper awareness strategy should be carried out by stakeholders to inform the public of the benefits of malaria vaccination. Lastly, vaccine availability should be 100% at all communities marked by the public health as areas of high malaria incidence to help foster smooth vaccination activities in these areas. 6.1. Strengths and Limitations of the Study. The research studied the asymptotic behaviour of malaria at the model equilibria. The bifurcation type invoked at the disease-free point D0f is analysed as the classical understanding that R0 < 1 is the condition for eradicating the disease is not always sufficient when the system undergoes backward bifurcation. The study analysed the global sensitivity to quantify the influence each parameter related to the R0 has on it. The model was redesigned into an intervention model for public health benefit with an insight shed on the shift from the classical understanding of nonpharmaceutical preventive malaria control to pharmaceutical measures of vaccines. A cost analysis of the intervention model was examined to identify the most cost-effective intervention regarding rewarding the desired outcome. Even though the proposed model and interventions identified have successfully minimized the infectives of the disease, we believe that if the model has been fitted to available data, it will help the public health to take the necessary action in the eradication program as the estimate of the model parameters will bring a better estimate of the R0 of the region of the dataset. Also, using a different methodology to analyse the disease transmission will bring to light a better understanding of the disease dynamics at all compartments. In the future, the authors propose considering calibrating the model to available data to estimate the model parameters and applying fractional calculus to the work to account for the memory effect in disease transmission. Data Availability Statement The authors confirm that the data supporting the findings of this study are available within the article. Journal of Applied Mathematics Conflicts of Interest The authors declare no conflicts of interest. Author Contributions Sacrifice Nana-Kyere: conceptualization, data curation, formal analysis, investigation, methodology, software, validation, writing-original draft, writing-review and editing. Baba Seidu: supervision, writing-original draft, writing-review and editing. Kwara Nantomah: supervision, writing-original draft, writing-review and editing. Funding The authors received no specific funding for this work. References [1] P. E. Parham and E. Michael, “Modeling the effects of weather and climate change on malaria transmission,” Environmental Health Perspectives, vol. 118, no. 5, pp. 620–626, 2010. [2] World Health Organization, Who Guidelines for Malaria, tech. Rep., World Health Organization, 2022, https://www.who.int/ teams/global-malaria-programme. [3] World Health Organization, WHO African Region, 3 June 2022, Tech. rep., World Health Organization, 2022, https:// www.afro.who.int/health-topics/malaria. [4] N. Chitnis, D. Hardy, and T. Smith, “A periodically-forced mathematical model for the seasonal dynamics of malaria in mosquitoes,” Bulletin of Mathematical Biology, vol. 74, no. 5, pp. 1098–1124, 2012. [5] H. Trottier and S. J. Elliott, “World health organization recommends first malaria vaccine,” Canadian Journal of Public Health, vol. 112, no. 6, pp. 967–969, 2021. [6] J. P. Sahoo, P. Mishra, S. Sahoo, and K. C. Samal, “Historic moment: WHO approves the world’s first malaria vaccine “Mosquirix or rts, s/as01”,” Biotica Research Today, vol. 3, no. 10, pp. 892–896, 2021. [7] K. Dietz and D. Schenzle, “Mathematical models for infectious disease statistics,” in A Celebration of Statistics: The ISI Centenary Volume A Volume to Celebrate the Founding of the International Statistical Institute in 1885, pp. 167–204, Springer, 1985. [8] M. Keeling and L. Danon, “Mathematical modelling of infectious diseases,” British Medical Bulletin, vol. 92, no. 1, pp. 33–42, 2009. [9] M. Y. Li, An Introduction to Mathematical Modeling of infectious Diseases, Vol. 2, Springer, 2018. [10] C. I. Siettos and L. Russo, “Mathematical modeling of infectious disease dynamics,” Virulence, vol. 4, no. 4, pp. 295–306, 2013. [11] Y. Sabbar, A. Khan, and A. Din, “Probabilistic analysis of a marine ecological system with intense variability,” Mathematics, vol. 10, no. 13, p. 2262, 2022. [12] Y. Sabbar, A. Din, and D. Kiouach, “Predicting potential scenarios for wastewater treatment under unstable physical and chemical laboratory conditions: a mathematical study,” Results in Physics, vol. 39, article 105717, 2022. [13] Y. Sabbar, A. Khan, A. Din, D. Kiouach, and S. Rajasekar, “Determining the global threshold of an epidemic model with Journal of Applied Mathematics general interference function and high-order perturbation,” AIMS Mathematics, vol. 7, no. 11, pp. 19865–19890, 2022. [14] J. Tumwiine, J. Mugisha, and L. Luboobi, “A host-vector model for malaria with infective immigrants,” Journal of Mathematical Analysis and Applications, vol. 361, no. 1, pp. 139–149, 2010. [15] Y. Sabbar, M. Yavuz, and F. Özköse, “Infection eradication criterion in a general epidemic model with logistic growth, quarantine strategy, media intrusion, and quadratic perturbation,” Mathematics, vol. 10, no. 22, p. 4213, 2022. [16] M. A. Penny, R. Verity, C. A. Bever et al., “Public health impact and cost-effectiveness of the rts, s/as01 malaria vaccine: a systematic comparison of predictions from four mathematical models,” The Lancet, vol. 387, no. 10016, pp. 367–375, 2016. [17] J. P. Romero-Leiton and E. Ibargüen-Mondragón, “Stability analysis and optimal control intervention strategies of a malaria mathematical model,” Applied Sciences, vol. 21, 2019. [18] B. Traoré, B. Sangaré, and S. Traoré, “Mathematical model of mosquito populations dynamics with logistic growth in a periodic environment,” Annals of the University of CraiovaMathematics and Computer Science Series, vol. 45, no. 1, pp. 86–102, 2018. [19] G. Ngwa and The Abdus Salam International Centre for Theoretical Physics, Trieste 34100, “Modelling the dynamics of endemic malaria in growing populations,” Discrete & Continuous Dynamical Systems-B, vol. 4, no. 4, pp. 1173–1202, 2004. [20] S. I. Oke, M. M. Ojo, M. O. Adeniyi, and M. B. Matadi, “Mathematical modeling of malaria disease with control strategy,” Communications in Mathematical Biology and Neuroscience, vol. 2020, 2020. [21] N. Chitnis, J. M. Hyman, and J. M. Cushing, “Determining important parameters in the spread of malaria through the sensitivity analysis of a mathematical model,” Bulletin of Mathematical Biology, vol. 70, no. 5, pp. 1272–1296, 2008. [22] H.-F. Huo and G.-M. Qiu, “Stability of a mathematical model of malaria transmission with relapse,” Abstract and Applied Analysis, vol. 2014, Article ID 289349, 2014. [23] T. O. Orwa, R. W. Mbogo, and L. S. Luboobi, “Mathematical model for hepatocytic-erythrocytic dynamics of malaria,” International Journal of Mathematics and Mathematical Sciences, vol. 2018, Article ID 7019868, 18 pages, 2018. [24] A. Ducrot, S. Sirima, B. Some, and P. Zongo, “A mathematical model for malaria involving differential susceptibility, exposedness and infectivity of human host,” Journal of Biological Dynamics, vol. 3, no. 6, pp. 574–598, 2009. [25] H. M. Yang, “A mathematical model for malaria transmission relating global warming and local socioeconomic conditions,” Revista de saude publica, vol. 35, no. 3, pp. 224–231, 2001. [26] S. Nana-Kyere, R. H. Doe, F. A. Boateng, J. K. Odum, S. Marmah, and D. T. Banon, “Optimal control model of malaria disease with standard incidence rate,” Journal of Advances in Mathematics and Computer Science, vol. 23, no. 5, pp. 1–21, 2017. [27] M. Arquam, A. Singh, and H. Cherifi, “Impact of seasonal conditions on vector-borne epidemiological dynamics,” IEEE Access, vol. 8, pp. 94510–94525, 2020. [28] A. Iggidr, G. Sallet, and M. O. Souza, “On the dynamics of a class of multi-group models for vector-borne diseases,” Journal of Mathematical Analysis and Applications, vol. 441, no. 2, pp. 723–743, 2016. 43 [29] M. L. G. Kuniyoshi and F. L. P. D. Santos, “Mathematical modelling of vector-borne diseases and insecticide resistance evolution,” Journal of Venomous Animals and Toxins including Tropical Diseases, vol. 23, 2017. [30] G. Cruz-Pacheco, L. Esteva, and C. Vargas, “Vaccination strategies for sir vector-transmitted diseases,” Bulletin of Mathematical Biology, vol. 76, no. 8, pp. 2073–2090, 2014. [31] P. M. Luz, C. J. Struchiner, and A. P. Galvani, “Modeling transmission dynamics and control of vector-borne neglected tropical diseases,” PLoS Neglected Tropical Diseases, vol. 4, no. 10, article e761, 2010. [32] C. Yi, L. W. Cohnstaedt, and C. M. Scoglio, “Seir-sei-enkf: a new model for estimating and forecasting dengue outbreak dynamics,” IEEE Access, vol. 9, pp. 156758–156767, 2021. [33] T. Smith, G. F. Killeen, N. Maire et al., “Mathematical modeling of the impact of malaria vaccines on the clinical epidemiology and natural history of plasmodium falciparum malaria: overview,” The American Journal of Tropical Medicine and Hygiene, vol. 75, 2_supplement, pp. 1–10, 2006. [34] G. J. Abiodun, P. Witbooi, and K. O. Okosun, “Modelling the impact of climatic variables on malaria transmission,” Hacettepe Journal of Mathematics and Statistics, vol. 47, no. 2, pp. 219–235, 2018. [35] M. T. White, R. Verity, T. S. Churcher, and A. C. Ghani, “Vaccine approaches to malaria control and elimination: insights from mathematical models,” Vaccine, vol. 33, no. 52, pp. 7544–7550, 2015. [36] H. C. Slater, L. C. Okell, and A. C. Ghani, “Mathematical modelling to guide drug development for malaria elimination,” Trends in Parasitology, vol. 33, no. 3, pp. 175–184, 2017. [37] S. Olaniyi, M. Mukamuri, K. Okosun, and O. Adepoju, “Mathematical analysis of a social hierarchy-structured model for malaria transmission dynamics,” Results in Physics, vol. 34, article 104991, 2022. [38] B. Traoré, O. Koutou, and B. Sangaré, “A mathematical model of malaria transmission dynamics with general incidence function and maturation delay in a periodic environment,” Letters in Biomathematics, vol. 7, no. 1, pp. 37–54, 2020. [39] C. Chiyaka, W. Garira, and S. Dube, “Mathematical modelling of the impact of vaccination on malaria epidemiology,” Theory of Differential Equations and Applications, vol. 1, no. 1, 2007. [40] S. Nana-Kyere, B. Seidu, and K. Nantomah, “Dynamical study of malaria epidemic: stability and costeffectiveness analysis in the context of Ghana,” Results in Control and Optimization, vol. 15, article 100430, 2024. [41] S. Nana-Kyere, F. A. Boateng, P. Jonathan et al., “Global analysis and optimal control model of COVID-19,” Computational and Mathematical Methods in Medicine, vol. 2022, Article ID 9491847, 20 pages, 2022. [42] B. Seidu, O. D. Makinde, and J. K. K. Asamoah, “Threshold quantities and lyapunov functions for ordinary differential equations epidemic models with mass action and standard incidence functions,” Solitons & Fractals, vol. 170, article 113403, 2023. [43] A. Thowsen, “The Routh-Hurwitz method for stability determination of linear differential-difference systems,” International Journal of Control, vol. 33, no. 5, pp. 991–995, 1981. [44] X. Yang, “Generalized form of Hurwitz-Routh criterion and Hopf bifurcation of higher order,” Applied Mathematics Letters, vol. 15, no. 5, pp. 615–621, 2002. 44 [45] C. Castillo-Chavez, S. Blower, P. van den Driessche, D. Kirschner, and A. A. Yakubu, Mathematical approaches for emerging and reemerging infectious diseases: an introduction, Springer Science & Business Media, 2002. [46] A. Khan, R. Zarin, G. Hussain, N. A. Ahmad, M. H. Mohd, and A. Yusuf, “Stability analysis and optimal control of covid-19 with convex incidence rate in khyber pakhtunkhawa (Pakistan),” Results in Physics, vol. 20, article 103703, 2021. [47] R. H. Martin Jr., “Logarithmic norms and projections applied to linear differential systems,” Journal of Mathematical Analysis and Applications, vol. 45, no. 2, pp. 432–454, 1974. [48] E. Acheampong, E. Okyere, S. Iddi et al., “Mathematical modelling of earlier stages of COVID-19 transmission dynamics in Ghana,” Results in Physics, vol. 34, article 105193, 2022. [49] S. Marino, I. B. Hogue, C. J. Ray, and D. E. Kirschner, “A methodology for performing global uncertainty and sensitivity analysis in systems biology,” Journal of Theoretical Biology, vol. 254, no. 1, pp. 178–196, 2008. [50] C. Castillo-Chavez and B. Song, “Dynamical models of tuberculosis and their applications,” Mathematical Biosciences & Engineering, vol. 1, no. 2, pp. 361–404, 2004. [51] S. M. Aseev and A. V. Kryazhimskiy, “The Pontryagin maximum principle and transversality conditions for a class of optimal control problems with infinite time horizons,” SIAM Journal on Control and Optimization, vol. 43, no. 3, pp. 1094– 1119, 2004. [52] S. Lenhart and J. T. Workman, Optimal Control Applied to Biological Models, Chapman and Hall/CRC, 2007. [53] T. Oluwafemi and E. Azuaba, “Impact of hygiene on malaria transmission dynamics: a mathematical model,” Journal of Multidisciplinary Applied Natural Science, vol. 2, no. 1, pp. 1–9, 2022. [54] L. Wang, H. Zhao, S. M. Oliva, and H. Zhu, “Modeling the transmission and control of Zika in Brazil,” Scientific Reports, vol. 7, no. 1, p. 7721, 2017. [55] M. A. Baihaqi and F. Adi-Kusumo, “Modelling malaria transmission in a population with SEIRSp method,” in AIP Conference Proceedings, Vol. 2264, AIP Publishing, 2020. [56] O. Koutou, B. Traoré, and B. Sangaré, “Mathematical modeling of malaria transmission global dynamics: taking into account the immature stages of the vectors,” Advances in Difference Equations, vol. 2018, 34 pages, 2018. [57] M. M. Ibrahim, M. A. Kamran, M. M. Naeem Mannan, S. Kim, and I. H. Jung, “Impact of awareness to control malaria disease: a mathematical modeling approach,” Complexity, vol. 2020, Article ID 8657410, 13 pages, 2020. [58] H. Tasman, “An optimal control strategy to reduce the spread of malaria resistance,” Mathematical Biosciences, vol. 262, pp. 73–79, 2015. [59] H. T. Alemneh, A. S. Kassa, and A. A. Godana, “An optimal control model with cost effectiveness analysis of maize streak virus disease in maize plant,” Infectious Disease Modelling, vol. 6, pp. 169–182, 2021. [60] T. D. Keno, O. D. Makinde, and L. L. Obsu, “Optimal control and cost effectiveness analysis of SIRS malaria disease model with temperature variability factor,” Journal of Mathematical & Fundamental Sciences, vol. 53, no. 1, pp. 134–163, 2021. Journal of Applied Mathematics [61] B. Seidu, J. K. K. Asamoah, E. N. Wiah, and J. Ackora-Prah, “A comprehensive cost-effectiveness analysis of control of maize streak virus disease with Holling’s type II predation form and standard incidence,” Results in Physics, vol. 40, article 105862, 2022. [62] S. Nana-Kyere and B. Seidu, “A mathematical evaluation of the cost-effectiveness of self-protection, vaccination, and disinfectant spraying for COVID-19 control,” Computational and Mathematical Methods in Medicine, vol. 2022, Article ID 1715414, 25 pages, 2022.