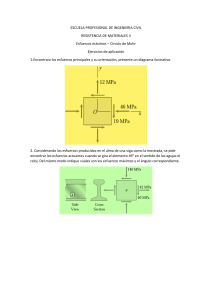
Monografía Elementos de Máquinas Mauro Casuriaga | C.I.: 5.248.533-3 Mateo Driedger | C.I.: 5.275.813-8 Objetivo Proyectar una grúa de brazo capaz de levantar una carga de 4 toneladas, con 180º de rotación. Con un factor de diseño de 2, basado en datasheets de grúas similares. A continuación un esquema de la misma: Elección de Polipasto Se contactó a diferentes empresas locales para solicitar catálogos de polipastos que sean adecuados para la instalación. El equipo seleccionado fue un polipasto de cadena eléctrico marca Stahl, modelo STK 5025-8/2 4/2-1, adquirible a través de la empresa Bromberg y Cia. S.A. El mismo está calificado para levantar cargas de hasta 5.000kg y además cuenta con un trolley de tamaño reducido para acoplar a la viga elegida. Determinación del punto de conexión Viga-Barra Ya que el rango para el ángulo entre la barra de tensión y la horizontal debe estar entre 20º y 25º, se selecciona un ángulo de 25º que para una misma tensión en la barra maximice la componente vertical de la fuerza, minimizando la horizontal. Esto provoca que la dimensión C dependa de la dimensión K. K debe ser tal que minimice el máximo momento flector de la viga para la posición de carga crítica. Ya que la posición de carga crítica depende de K, para poder hallar K se deberá iterar. Primera estimación de K Para obtener una primera estimación de K se utilizara el siguiente modelo: se modelará una Viga empotrada con un apoyo simple en el punto G y se utilizara un software (Blue Ketchup Deflection) para iterar rápidamente, este software se verificó con casos de resultados conocidos. El apoyo simple es una hipótesis que no es correcta ya que por la geometría de la conexión Viga-Barra, existe un momento generado por la reacción en G, que tiene dirección 25º con la horizontal. De igual manera nos da una primera idea de donde se encontrará K, y del momento máximo sobre la Viga, disminuyendo la cantidad de perfiles de Vigas entre los cuales elegir. El procedimiento de iteración utilizado es el siguiente: Se elige un K, para cada K hay dos candidatos de posición de carga que generan máximo momento flector, uno al final de la Viga y otro entre el empotramiento y el apoyo. Entonces se coloca la carga en el final y se obtiene el momento flector máximo en esta configuración, luego se va probando entre el empotramiento y el apoyo hasta encontrar una posición que maximiza el momento flector. Lo que nos deja con un Mfmax (Momento flector máximo cuando la carga está al final) y un Mmmax (Momento flector máximo cuando la carga está entre el empotramiento y el apoyo), si Mmmax es mayor que Mmmax, disminuimos un poco K, de lo contrario lo aumentamos. Así termina un paso de iteración, la iteración termina cuando Mfmax=Mmmax ya que este será el minimo Momento Flector Maximo. Se realiza para un perfil cualquiera (ya que los momentos no dependen de esto), para una barra de 20ft/6,096m con una carga de 8000lb/4tons. Ya que esta es tan solo una primera aproximación de K y no se está tomando en cuenta el peso de la Viga, la posición crítica entre el apoyo y el empotramiento siempre tiene la misma proporción con la posición del apoyo, que la hayamos en aproximadamente (33/50)*(6,096-K). A continuación se muestra en la Figura 1 el programa utilizado y la tabla 1 con los datos de iteración. Figura 1 Tabla 1: Datos de iteración para primera estimación de K (Orden de realización) Posición apoyo Mmmax (N.m) Mfmax (N.m) Mmax total (N.m) (6,096-K) (m) 6,096 37500 0 37500 5,000 30800 -38900 38900 5,500 33800 -21200 33800 5,750 35400 -12300 35400 5,250 32300 -30000 32300 5,200 32000 -31800 32000 5,197 32000 -31900 32000 Con lo que la primera aproximación de K se halla: K ≈ 3ft ≈ 0,9m Primera estimación de Viga Ya que tenemos una aproximación de K, para hacer una primera estimación de la Viga a utilizar incluiremos en el software el Material, perfil y peso de las Vigas estándar IPN (Se eligió este estándar ya que se encontró que están disponibles en comercios locales). El programa calculará el esfuerzo flector máximo y se verificará que se encuentre entre los parámetros requeridos (13ksi-16ksi). A continuación la Tabla 2 con la verificación de diferentes perfiles IPN: Tabla 2 Perfil σmax (ksi) Resultado IPN 200 24,4 Subdimensionada IPN 300 8 Sobredimensionada IPN 240 14,6 Candidato IPN 220 18,5 Subdimensionada IPN 260 11,8 Candidato Se concluye que tanto la IPN 240 como la IPN 260 son las candidatas a Viga. La 240 porque está dentro del rango admitido y la 260 ya que una vez se tome en cuenta el momento generado por la conexión G pueden aumentar los requerimientos sobre la viga. Una vez obtenidos estos resultados comenzamos a buscar proveedores locales, las vigas pertenecientes a este estándar se encuentran fácilmente en longitudes de 12m y 6m. Ya que la longitud aproximada debe ser de 20ft/6,1m se decidió diseñar la grúa con una longitud de viga de 6m ya que consideramos que la pequeña longitud que se pierde no justifica comprar una barra más larga y desperdiciar la mitad, tanto económica como prácticamente. Una vez decidido esto hallamos una nueva estimación de K mediante el mismo procedimiento lo que arrojó un K≈0,9m que como se puede observar no varió. Diseño de la unión Viga-Barra Esta unión se encuentra bajo mayor esfuerzo cuando la carga se encuentra al final de la barra, que utilizando el software arroja una componente vertical de 46kN, que teniendo en cuenta el ángulo de 25º en el que se aplica la fuerza de la barra nos deja una fuerza de 109kN. Utilizando estos datos y análisis de elementos finitos en Autodesk Inventor y Autodesk Fusion, se determinó utilizar una plancha de 1/2in doblada. El material a utilizar es un acero AISI 1045 templado y revenido (elegido en base a sus propiedades y disponibilidad en plaza), la mayoría de las partes fueron diseñadas con este acero y su tratamiento térmico en mente, de manera de simplificar la obtención de los materiales. Para los pernos de conexión entre la unión y la viga se tiene que el diámetro máximo de aujero es de 5/8in, utilizando un patrón de 3x2 se halló mediante métodos de elementos finitos que el esfuerzo máximo de 42ksi, con un factor de diseño de dos: 84ksi, si elegimos un perno ASTM A325 nos queda 92𝑘𝑠𝑖 ≥ 84𝑘𝑠𝑖. Cálculo del perno Ya que se tiene el perno debe soportar 109kN, y que se dividirá en dos apoyos, se tiene que solo estará sometido a esfuerzos cortantes, y el esfuerzo cortante máximo queda τ = está diseñando con un factor de diseño de dos: 𝑆𝑦 ≥ 54,5𝑘𝑁 , ya que la grúa se 𝐴 2×12252𝑙𝑏𝑓 , por lo que se elige un perno ASTM 𝐴 A325 de 3/4´´ que nos queda: 92000𝑝𝑠𝑖 ≥ 55465𝑝𝑠𝑖. Y se elige de un largo tal que la rosca no esté sometida a la cortante. Determinación final de K y C Ya que tenemos las dimensiones de la unión Viga-Barra que se encuentra en el punto G, sabemos que momento hace esta sobre la viga, por lo cual podemos determinar un K final tal que minimice el momento máximo sobre la viga para cualquier posición de la carga Posición apoyo Posición de carga Mmmax (N. (6-K) (m) crítica entre m) apoyo y pared Mfmax (N.m) Mmax (N.m) 5,1 3,5 36500 -32200 36500 5 3,2 35500 -35800 35800 total Por lo que queda determinado K=1m y C=2.28m, y para la viga IPN 240 el esfuerzo maximo es de 14,5 ksi lo que esta dentro de los parametros, por lo cual la elegimos Diseño de conexión diagonal La barra también fue diseñada utilizando acero AISI 1045, sin embargo, dado la dificultad de templar y revenir la barra entera debido a su tamaño, se verificó que pudiera ser utilizada en estado recocido, y si bien aguantaría el esfuerzo de la fuerza directa, hay un problema con las roscas que la conectan a cada acople. Para que pudiera aguantar el esfuerzo en la parte roscada tomando en cuenta un factor de seguridad mayor a 2, se llegó a la conclusión de que los extremos de la barra si deberían ser templados y revenidos. La barra fue diseñada de 2 pulgadas de diámetro, con una rosca UNF 2”-12. Diseño de conexión B Para esta conexión primero se decidió el patrón de pernos que íbamos a utilizar, que fue de 4x2 con separaciones de 50mm, luego calculamos el esfuerzo cortante máximo para el perno crítico, con el método de cargas excéntricas y las cargas calculadas por el software de vigas, lo que arrojó una carga máxima de 81kN, probando con el perno utilizado en la conexión G queda un factor de seguridad mayor a 2, por lo tanto lo utilizamos, ya que es buena práctica utilizar la menor cantidad de pernos diferentes. El resto de la geometría se diseñó iterando con la utilización de Análisis de elementos finitos. Diseño de stops Ya que el polipasto no va a estar moviéndose a velocidades grandes no se calculan esfuerzos por impacto. Ilustración final