Discussion Group: B
ME3200 Machine Design Project
Semester 5
Final Report
By
Index No.
180046U
Name
HRSKB Ariyarathne
Date of submission
Due date of submission
Marks
23/02/2022
23/02/2022
Discussion group advisors’ names and affiliations
Dr MMID Manthilake
Mr GPM
Ehelagasthenna
Mr HAP Bimsara
Department of Mechanical Engineering,
University of Moratuwa
Department of Mechanical Engineering,
University of Moratuwa
Department of Mechanical Engineering,
University of Moratuwa
Department of Mechanical Engineering
University of Moratuwa
Sri Lanka
1
Introduction
Gear are wheel with teeth used to transmit power and motion from one shaft to another
when constant velocity reduction is desired. Gear drives can multiply the torque while reducing
the rotational speeds and change the direction of shaft rotation. Compared to belt and chain
drives gear drives can transmit large powers with higher efficiency and they are compact in size.
also they can operate in high speeds as well.
Conveyor systems are used in most of the manufacturing processes to transport raw
material and end products. Since different loads needs different torques as well as specific tasks
need different speeds speed reduction method should be used. This speed reduction can be
achieved by using gearbox, pulley arrangement, variable speed motor or hydraulic operation.
Modern conveyor systems use VFD drives to control the speed of the conveyor belts. Main
problems with a VFD system are initial cost is relatively high, at some speeds resonance may
occur resulting increased noise and excessive vibrations and they have rather short lifespan. As a
low cost alternative gearboxes can be used.
In this report 3 speed gearbox design for a conveyor belt in a canned fish manufacturing
plant is conducted. Gearbox will be needed to regulate the torque by selecting appropriate speed,
to control the speed of the drive and to reverse the drive. Gearbox should provide a speed
reduction from motor to driven pulley of the conveyor belt, should transmit the required amount
of power to the conveyor system, should provide smooth operation and should be easy to
manufacture.
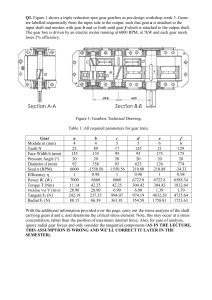
Figure 1: Conveyor Gearbox [4 ]
2
Problem Description
2.1 Conveyors
Conveyors are used in almost every industry to move objects from one location to another.
There is a good chance that packaged products we get hands on has moved on a conveyor at
one stage. There are different types of conveyors such as screw type, gravity, pallet handling
and most commonly used type is the belt & chain.
Figure 2: Conveyor Belt [2]
Conveyor belts have make a great impact in food industry. They provide flexibility of
changing production volume according to the market and trends, save energy and labour cost,
improved productivity and competitiveness among the market and much higher production
capacity which lead to opportunity seizing in the market gaps. Gearbox is considered to be the
heart of a conveyor system. When it comes to conveyors the main role of the gearbox is the
speed reduction. In addition, it will multiply the torque and will help the longevity and improved
performance of the system.
2.2 Objective
Sri Lanka is an island surrounded by ocean which makes the fish industry very popular and
canned fish has a huge demand in Sri Lanka. Processed canned fish or cases of canned fish
needs to be transported from production line to storage facilities and then from storage facilities
to factory outlets. Large amount of canned tuna is manufactured daily making the manual
process of transporting highly inefficient. This is where conveyor belts are very useful.
Figure 12: Conveyor Belts Used for Canned Food [17]
Figure 3: Conveyor Belts Used for Canned Food [3]
Most of the large scale factories are using Variable Frequency Drives (VFD) in the conveyor
systems as they provide good control of the process. Main issues with a VFD system are initial
cost is relatively high, at some speeds resonance may occur resulting increased noise and excessive
vibrations and they have rather short lifespan. Therefore, use of a gearbox rather than a VFD is
more suited for a medium scale enterprise where initial cost and maintenance is a huge factor.
Most of the small scale factories use single speed reduction gearbox for the conveyors. This is not
only inefficient but also time consuming when designed for different loads.
Figure 5: Conveyor Belt with a Gearbox [4]
Figure 4: Variable Frequency Drive [1]
Canned fish comes in variety of sizes and most common are 125 g, 225g and 425g. Goal
of this project is to design a 3-speed gearbox to coop with the different sizes of canned fish
products. This will put less stress on prime mover due to torque multiplication from the gearbox
as well as ensure a long working life of the conveyor system. Further time consumed for the
process will be significantly less due to variable speeds. Canned fish comes in variety of sizes
and most common are 125 g, 225g and 425g and goal is to design a 3-speed gearbox to coop
with the different sizes of canned fish products. Filling the cans are mostly done by hand in the
industry and the time taken to fill a 125g can is less than time taken to fill 225g can. Therefore,
three sizes will have three different production rates which can be achieved by using a 3 speed
gearbox. Reverse gear will be essential for the quality control of the products.
2.3 Parameters
Table 1: Design Specifications [6]
Length
10 m
Width
0.3 m
Thickness
0.01 m
Material Used for Belt
Rubber Composite
Density
1.2 kg/m3
Linear Speed
0.35 m/s
Product Conveyor Carry
Canned Fish
Weight of an Empty Can
75 g
Weight of Different Sizes
425 g, 225 g, 125g
Production Rate
5000 per day
Maximum Loading Capacity
150 kg
Coefficient of Friction
0.64
Forward Gears
3
Reverse Gears
1
Cost of the Machine
Rs. 100,000
Cost of Maintenance
Rs. 30,000 per annum
Maintenance Intervals
3 months
Operator Skill
Advanced Beginner
2.4 Importance of the Parameters
Many make the mistake of designing the gearbox equivalent to the size of motor rather than
the equivalent to the load it’s working with. This will typically lead to a much bigger and
expensive prime mover which will be too much for the required load. Therefore, gearbox should
be designed keeping the load in mind in order to save money and energy in long run.
Weight of the conveyor belt and total weight of canned food on the conveyor belt is the
main parameter which determines the amount of torque needed for the operation of conveyor
belt. To find the weight of the belt, dimensions are needed. Here rubber composite is used as the
belt material and with the density weight of the belt can be determined. By knowing the weight
of a canned fish and the number of canned fish on the conveyor belt total weight of the canned
fish can be determined which will give the total load applied on the conveyor belt. With the total
weight and friction coefficient total pull needed for the operation can be found and with the
linear speed of the belt total required power can be determined. With the known gear ratios
finally prime mover for the application can be selected.
Figure 6: Conveyor Gearbox Sizing [5]
Additionally, assumed that conveyor operate in a flat surface and there is no incline
angle. Therefore, effect of the gravity can be neglected. Belt drive is used for the power
transmission as they are cost-effective, simple, low maintenance and they can absorb shock and
vibrations well. 3-phase induction motors are ideal for conveyor systems as it provides very high
starting torque. Typical motors used for conveyors generate the power around 1800 rpm, therefore
higher reduction ratios are desired. Input and output shaft diameters will be needed for torque and
speed calculations of the gearbox.
2.5 References
[1] - Variable Frequency Drives (VFD) Variable Frequency Drive. (n.d.).
[2] -Proymec. (2019). The conveyor belt market is ready to grow in 2019. Proymec.
https://proymec.es/en/el-mercado-de-las-bandas-transportadoras-esta-listo-para-crecer-en-2019/ ,
(accessed Oct. 29, 2021)
[3] -Aluminum cans for food processed in factory line conveyor machine at canned food
manufacturing, selective focus. (2020). https://www.dreamstime.com/aluminum-cans-foodprocessed-factory-line-conveyor-machine-canned-manufacturing-selective-focusimage202089575 , (accessed Oct. 20, 2021)
[4] - High-speed Solid-rotor Motors, Gearbox Motor Conveyor Manufacturers. (2021). NER
GROUP CO. LIMITED. https://www.guomaodrive.com/blog/gearbox-motor-conveyormanufacturers.html , (accessed Oct. 24, 2021)
[5] - Oriental Motor. (2021). Belt Conveyor Sizing Tool. Oriental Motor.
https://www.orientalmotor.com/motor-sizing/beltConveyor-sizing.html , (accessed Oct. 25,
2021)
[6] - Coefficient of Friction Equation and Table Chart. (2021). Engineers Egde.
https://www.engineersedge.com/coeffients_of_friction.htm , (accessed Oct. 20, 2021)
[7] - Allan Barber, G. I. O. M. T. C. (2020). The Key Role of Industrial Gearboxes. Lubrizol360.
https://www.youtube.com/watch?v=OlPht51R9k4&ab_channel=Lubrizol360, (accessed Oct. 17,
2021)
[8] - CASSANDRA. (2017). Conveyor belts and their role in the food industry. LOCKER.
http://locker.com.au/blog/general-industrial/conveyor-belts-and-their-role-in-the-food-industry/ ,
(accessed Oct. 20, 2021)
3
Background Study
3.1 What is Gearbox?
Gearbox is a mechanical method of transferring energy from one device to another while
increasing torque and reducing speed. Gearboxes are widely used in many industries such as
cement industry, sugar industry, paper industry, power generation etc. They are available in wide
range of different sizes depending on the application.
Figure 7: Simplified Gearbox [7]
3.2 Why We Need a Gearbox?
The purpose of a gearbox is mainly to increasing the torque while reducing the speed of the
prime mover output. Other than that they can be used to get the reverse movement as a prime
mover like IC engine only operate in one direction, to maximize the fuel efficiency by keeping the
prime mover in desired RPMs and to disconnect drive shaft and output shaft (Neutral) when
needed.
3.3 Advantages of a Gearbox
Due to no slip exact velocity ratio can be obtained
Able to transmit larger powers than belt drives and chain drives
Gears are more efficient in transmitting power
They are much compact compared to belt and chain drives
Power can be transmitted in very low velocities which cannot be done with belt drives
3.4 Limitations of a Gearbox
Special tools and machines are required to manufacture gears
Manufacturing and maintenance cost are comparatively high
Cutting of gear teeth should be precise otherwise vibrations will induce
3.5 Gearbox Applications
Industrial applications
Cranes
Conveyers
Machine tools (Lathe, Drilling, Milling)
Crushers
Power generation (Wind Turbines)
Figure 8: Gearbox used in a Conveyor [6]
Automobiles
Manual Transmissions
Automatic Transmissions
Home appliances
Dishwashers
Washing machines
Lawn mowers
3.6 Gearbox Components and Features
Input Shaft - Takes power from the engine to the gearbox. It uses a clutch to engage and
disengage the input shaft to gearbox.
Lay Shaft - Connects with the clutch shaft directly. Engine power is transferred to output
shaft by continuous meshing.
Output Shaft - It is the shaft that runs at the wheel speed. It carries power from the counter
shaft by use of gears and it runs at different speeds and torque compared to the counter
shaft.
Gears – Circles with teeth that rotate and meshes with another gear on different shaft. They
are used to transmit power from one shaft to another. The amount of torque transmitted
through gears depends on the number of teeth and size of the gear.
Figure 9: Shafts in a Gearbox [5]
Synchromesh Devices – Used to synchronize the speeds between collar and the gear.
Sometimes the speeds could end up being different, so you need the synchronizers to
prevent that from happening.
Collar – Locks the selected gear in place and allows power to transmit.
Bearings – Used to reduce the friction in rotating parts.
Gear Lever – Used to shift gears and it is controlled by our hand.
Figure 10: Synchronisers [9]
Figure 11: Bearings [10]
3.7 Types of Gearboxes
Industrial
Helical Gearbox
Coaxial Helical Inline Gearbox
Bevel Helical Gearbox
Skew Bevel Helical Gearbox
Worm Reduction Gearbox
Planetary (Epicyclic) Gearbox
Figure 12: Helical Gearbox [8]
Manual Transmission
Sliding Mesh Gearbox
Constant Mesh Gearbox
Synchromesh Gearbox
Automatic Transmission
Torque Converter
Automated Manual Transmission (AMT)
Continuously Variable Transmission (CVT)
Dual Clutch Transmission (DCT)
Figure 14: Torque Converter [11]
Figure 13: CVT Transmission [12]
3.8 Materials Used in Gearboxes
Table 2: Materials Used in Gearboxes
Part
Materials used
Casings
Cast Iron, Cast Aluminium, Composites
Shafts
Steel, Cast Iron, Stainless Steel, Hardened Steel
Bearings
High Carbon Chromium Steel, High Carbon Stainless Steel
Gears
Case Hardening Steel, Cast Iron, Plastic, Wood, Aluminium,
Brass, Magnetic Alloys
Collars
Aluminium, Steel, Stainless Steel, or Alloyed Steel and Coated
with Zinc, Chromium
Synchromesh Devices
Steel, Brass
Gear Lever
Medium Carbon, Steel, Polymer
Figure 15: Gearbox Components [8]
3.9 Lubrication of Gearboxes
3.10 Purpose of Lubrication in a Gearbox
Reduce the friction in moving parts
Cools the surfaces by carrying heat away
Absorb shocks between bearings and other parts
Reduce the noise of the moving parts
Cleaning the surface by carrying away small debris
Grease Lubrication [13]
Suitable for low speed applications.
No cooling effect
Should not be used for continuous operation or high load gear drives
Splash lubrication [13]
Typically used for Spur, Helical, and Bevel gears
Gears are dip into an oil bath
Oil will be splashed once rotation starts
Spray Lubrications [13]
Suitable for high speed applications
Spray using a nozzle with a circulation pressure
3.11 Alternatives for Gearboxes
Electric Drives
Hydraulic Drives
Belt Drives
Chain Drives
Magnetic Gears [14]
Diesel-Electric Transmission (Used in Locomotives)
Figure 9: Hydraulic drives [15]
Figure 17: Hydraulic drives [15]
Figure 16: Magnetic gears [14]
3.12 Gearbox Type & Layout
3.13 Sliding Mesh Gearbox
Sliding mesh gearbox is selected because it is simple to design and cheap to manufacture.
Main issue with the sliding mesh gearbox is the fact that speeds of the input and output shafts
should matched when changing gears. Otherwise gearwheels do not align and crash into one
another. This will not be a problem as our application does not require to change gears will in the
move. Shifting of the gears is done by meshing of the gears on the main shaft with the gears on
the lay shaft by moving right or left direction on main shaft. Here first gear provides the maximum
torque with low speed and final gear provides lowest torque with a higher speed.
Figure 18: Sliding Mesh Gearbox
3.14 Gear Types
3.15 Spur Gears
Spur gears are the simplest and widely used type of gears. They are cylindrical gears with radial
straight teeth and shafts are parallel and coplanar. Often pressure angle of a spur gear is considered
to be 200. They have an involute profile and mesh one tooth at a time. Involute profile means spur
gears only produce radial forces (no axial forces). Spur gears are good for low and moderate speed
applications and at high speed operation will be noisy.
Pros
Ease of assembly
Ease of maintenance
Straight teeth are easy to align
Minimal power loss
Axial loads are non-existent (Therefore no need of locking mechanisms in axial direction)
Cons
Not strong as other gears (Helical gears have a better stress distribution)
Power only can be transmitted in parallel direction (Cannot transmit power in
perpendicular directions like worm gears)
Meshing is difficult while in operation
Noisy in high speed operation
For our application power is only transmitted in parallel directions and meshing is not done while
conveyor is under operation. Therefore, spur gears will be the best selection.
Figure 19:Spur Gears [9]
3.16 Environmental and Operational Conditions
Gearbox should be dust and waterproof in order to maximize the lifetime. Also anti
corrosive treatments will be needed if the humidity in air is very high. Optimum working
temperature range is preferred as overheating will lead to premature gearbox failure. Proper
lubrication is required to minimize the friction in gear wheels and to absorb the heat generated.
Splash lubrication is frequently used in small to medium gearboxes. Operation of the gearbox
should be user-friendly as well should not be harmful to the user. There will be no large shocks or
vibrations involved with the operation but loading and unloading can impact the drive. System will
run for around 8 hours per day with intervals in between. Gearbox can be mounted right angled to
the shaft in order to save space and it can be operated by a person with only basic knowledge on
operating a conveyor.
Figure 20: Gearbox Lubrication [19]
Further gearbox should be water and dust proof for a longer operation life. Specially in
food industry conveyors may expose to the water in operation or by accidents. Therefore, IP44
water and dust resistance rating is suggested. IP44 means the gearbox is protected against objects
bigger than 1mm and water splashing from all directions. IP44 is enough for our applications as
going with higher IP rating will drastically increase the manufacturing effort and cost.
Figure 21: IP44 Water Resistance [14]
Working temperature is another crucial factor for smooth operation of a gearbox as at high
temperatures viscosity of lubricants becomes lower and at low temperatures viscosity becomes
higher which will change the flow characteristics of the lubricants as well as lubrication may not
be as effective as operating under the ideal conditions.
3.17 References
[1] - Stokes, Alec. (1992). Manual gearbox design. Butterworth-Heinemann.
[2] – Operations, M. (2007). CONVEYOR DESIGN REVIEW Prepared for ABC MINING
CONVEYOR NUMBER CV202.
[3] - Bebic, M. Z., & Ristic, L. B. (2018). Speed controlled belt conveyors: Drives and
mechanical considerations. Advances in Electrical and Computer Engineering, 18(1), 51–60.
https://doi.org/10.4316/AECE.2018.01007
[4] - Krushna Sawant. (2021). What is Gearbox: Types of Gearbox, Parts & Working.
https://www.automobileinformer.com/gearbox/, (accessed Oct. 20, 2021)
[5] - ANAA LAVAA. (2021). Gearbox Components and Parts: Everything You Need to Know.
Linquip. https://www.linquip.com/blog/gearbox-components-and-parts/, (accessed Oct. 25,
2021)
[6] - Supplier Homepage. (2021). Mining Industry Quarry Use Belt Conveyor Gearbox Drive.
https://cntruemax.en.made-in-china.com/product/HZrmBdDPbnWL/China-Mining-IndustryQuarry-Use-Belt-Conveyor-Gearbox-Drive.html. (accessed Oct. 25, 2021)
[7] - Variable Frequency Drives (VFD) Variable Frequency Drive. (n.d.).
[8] - Gear box. (2021). SlideShare. https://www.slideshare.net/deep388/gear-box-79440028,
(accessed Oct. 20, 2021)
[9] - Gear 1/2 Synchroniser Original Jumper Boxer Ducato 2323E5 9467633588. (2021).
Eurofrance24.Com. https://eurofrance24.com/gear-1-2-synchroniser-original-jumper-boxerducato-2323e5-9467633588.html, (accessed Oct. 25, 2021)
[10] - Gearbox Bearing. (2021). Indiamart.Com. https://www.indiamart.com/proddetail/gearboxbearing-20160074597.html, (accessed Oct. 24, 2021)
[11] - AAMCO. (2019). AAMCO Blog | What is a Torque Converter. AAMCO Transmissions
Total Car Care Blog. https://www.aamcoblog.com/Article/What-is-a-Torque-Converter-andHow-Does-it-Function, (accessed Oct. 22, 2021)
[12] - Jessica Shea Choksey. (2021). What is a CVT, or Continuously Variable Transmission?
J.D.Power. https://www.jdpower.com/cars/shopping-guides/what-is-a-cvt-or-continuouslyvariable-transmission, (accessed Oct. 22, 2021)
[13] - 3 Common Methods of Gearbox Lubrication. (2017). Amarillogearservice.
https://www.amarillogearservice.com/3-common-methods-gearbox-lubrication/, (accessed Oct.
22, 2021)
[14] - Paul Boughton. (2013). Magnets offer alternative to mechanical gears. ENGINEERLIVE.
https://www.engineerlive.com/content/magnets-offer-alternative-mechanical-gears, (accessed
Oct. 22, 2021)
[15] - KEN KORANE. (2020). New hydraulic drives for excavators. Mobilehydraulictips.
https://www.mobilehydraulictips.com/ifpe-download-new-hydraulic-drives-for-excavators/,
(accessed Oct. 20, 2021)
[16] -Markus Ihmsen. (n.d.). How to Cut Gearbox Lubrication Development from Days to
Hours. AVL. Retrieved October 30, 2021, from https://www.avl.com/-/how-to-cut-gearboxlubrication-development-from-days-to-hours , (accessed Oct. 20, 2021)
4
Design Calculations and Materials Selection
4.1 Components of the Conveyor Design
Figure 22 : Components in the Gearbox Design
Prime Mover
(3 Phase Induction
Motor)
Coupler
(Sleeve Coupler)
Input Shaft
(Keys and Gears)
Lay Shaft
(Keys and Gears)
Output Shaft
(Splines and
Gears)
Belt Drive
(Keys Pulleys and
V-Belt)
Conveyor Belt
(Drive Roller)
Figure 23 : Power Flow
Table 3:Conveyor Specifications
Length
10 m
Width
0.3 m
Thickness
0.01 m
Material Used for Belt
Rubber Composite
Density
1200 kg/m3
Linear Speed
0.35 m/s
Product Conveyor Carry
Canned Fish
Weight of a Empty Can
75 g
Weight of Different Sizes
425 g, 225 g, 125g
Production Rate
5000 per day
Maximum Loading Capacity
150 kg
Coefficient of Friction
0.64
Forward Gears
3
Reverse Gears
1
Power Calculation
30cm
(3 cans)
9cm
1000cm
(100 cans)
Figure 24: Dimensions of Conveyor Belt and Cans
There are 3 x 100 = 300 of maximum cans on the conveyor belt at any given time.
• Weight of
Belt
• Weight of
Product
the
the
Belt Pull
• Total Weight
• Friction
Coefficient
• Belt Pull
• Constant Speed
• Power Losses
Power
Required
Total Weight
Figure 25- Power Calculations
Weight of the conveyor belt
= Length x Width x Thickness x Density
= 10m x 0.3m x 0.01m x 1200kg/m3
= 36kg
Considering the first gear with 425g fish cans,
= Weight of a Can × No. of Cans
Weight of products
= 425g x 100 x 3
= 127.5kg
= Weight of the conveyor belt + Weight of the products
Total Weight
= 36kg + 127.5kg
= 163.5kg
Assumed that conveyor operate in a flat surface and there is no incline angle. Therefore, effect
of the gravity can be neglected.
Required belt pull
= Friction Coefficient x Total Weight x Gravitational Acceleration
= 0.64 x 163.5kg x 9.81ms-2
= 1026.5184N
Required Power
= Force x Linear Speed
= 1026.5184N x 0.2ms-1
= 205.30368Nms-1
1 Watt = 1 Nms-1
Therefore, Required Power
= 205.30368W
= 0.205kW
Figure 26: 425g Jack Mackerel [22]
Considering the second gear with 225g fish cans
= Weight of a Can × No. of Cans
Weight of products
= 225g x 100 x 3
= 67.5kg
= Weight of the conveyor belt + Weight of the products
Total Weight
= 36kg + 67.5kg
= 103.5kg
Required belt pull
= Friction Coefficient x Total Weight x Gravitational Acceleration
= 0.64 x 103.5kg x 9.81ms-2
= 649.8144N
Required Power
= Force x Linear Speed
= 649.8144N x 0.35ms-1
= 227.435Nms-1
Therefore, Required Power
= 227.435W
= 0.227kW
Figure 27:225g Canned Fish [22]
Considering the third gear with 125g fish cans
= Weight of a Can × No. of Cans
Weight of products
= 125g x 100 x 3
= 37.5kg
= Weight of the conveyor belt + Weight of the products
Total Weight
= 36kg + 37.5kg
= 73.5kg
Required belt pull
= Friction Coefficient x Total Weight x Gravitational Acceleration
= 0.64 x 73.5kg x 9.81ms-2
= 461.4624N
Required Power
= Force x Linear Speed
= 461.4624N x 0.5ms-1
= 230.7312Nms-1
Therefore, Required Power
= 230.7312W
= 0.23kW
Figure 28: 125g Canned Fish [22]
Table 4: Power Calculation
Load (kg)
Gear
Linear Speed
Torque Required
Power Required
(ms-1)
(Nm)
(kW)
163.5
1
0.2
102.65
0.205
103.5
2
0.35
64.98
0.227
73.5
3
0.5
46.15
0.23
Power losses occur due to gears, bearings, seals and auxiliaries. By using 1.4 power loss factor
for the drive train,
Required power from prime mover
= 1.4 x 0.23kW
= 0.322kW
= 0.432 HP
Y2 Series 3 Phase Induction Motor
ATO Y2 series 3 phase induction motor was selected as the prime mover
Table 5: Prime Mover Selected [23]
ATO Y2 series 3 phase induction motor
kW
0.37
HP
0.5
RPM
900
Input Current
1.23 Amp
Efficiency
62%
Power Factor
0.70
Rated Torque
3.93N/m
Max Torque/Rated Torque
2.0
Noise
54 dB
Weight
15.5 kg
4.2 Gear Calculations
Table 6 : Gear Ratios
Gear Ratios
Input and Lay shaft
3.75
1st Gear
3.14
2nd Gear
1.79
3rd Gear
1.25
Reverse Gear
3.14
Belt Drive
2
4.2.1 Assumptions
200 full depth involute system is assumed
Face width of the gear teeth is equal to 9 x module
Gears are assumed to be carefully cut
Power loss is neglected in the spur gears
4.2.2 Standard Proportions of a Gear System
Figure 29 : Detailed Geometry of a Gear Teeth [1]
d = P.C.D. of a gear
T = number of teeth
Circumference of the pitch circle = π d = p T
m = (p / π) = module of the gear
P.C.D. of the gear = d = (p T / π) = (p / π) T = m T
According to AGMA (American Gear Manufacturers Association) following is the standard values
for the module of a gear teeth and two meshing gears should be equal for a proper mesh between
them.
Set I: 1.0, 1.25, 1.5, 2.0, 2.5, 3.0, 4.0, 5.0, 6.0, 8.0, 10.0, 32.0, 40.0 [1]
Table 7 : Standard Proportions [1]
20o full depth Involute
Particulars
Value for this case (mm)
system
Addendum
1m
2
Dedendum
1.25m
2.5
Working depth
2m
4
Minimum total depth
2.25m
4.5
Tooth thickness
1.5708m
3.1416
Minimum clearance
0.25m
0.5
Fillet radius at root
0.4m
0.8
4.2.3 Calculation of Gear teeth for input and lay shaft gears (Gears 1 and 2)
4.2.3.1 Data
Power = 370 W
RPM = 900 rpm
Gear Reduction = 3.75
4.2.3.2 Formulas [1]
𝑟𝑝𝑚 𝑜𝑓 𝑡ℎ𝑒 𝑝𝑖𝑛𝑖𝑜𝑛
𝑁𝑜.𝑜𝑓 𝑡𝑒𝑒𝑡ℎ 𝑖𝑛 𝑤ℎ𝑒𝑒𝑙
G = Gear Ratio = 𝑟𝑝𝑚 𝑜𝑓 𝑡ℎ𝑒 𝑔𝑒𝑎𝑟 𝑤ℎ𝑒𝑒𝑙 = 𝑁𝑜.𝑜𝑓 𝑡𝑒𝑒𝑡ℎ 𝑖𝑛 𝑝𝑖𝑛𝑖𝑜𝑛
Tp ≥ 2 / {[G2 + Sin2(ψ) (1+2G)] ½ - G}
P.C.D. of the gear = d = m T
0.154 – 0.912 / T, for 200 full depth system
Strength of the teeth = ( σo y) b m π Cv
The pitch line velocity (v) = ω d / 2
Velocity factor (Cv) = 3 / (3+v)
4.2.3.3 Determining the no. of Teeth in Pinion
T1 ≥ 2 / {[G2 + Sin2(ψ) (1+2G)] ½ - G} = 15.45 = 16
Calculated minimum no. of teeth for interference is 16. Taking the no. of teeth close to
the minimum requirement will be beneficial in manufacturing process. But taking 16 as
the input pinion no. of teeth clearance for the reverse pinion and gear will be not
sufficient. Therefore no. of teeth of the input pinion is selected to be 20. Center distance
should be calculated using input and lay shaft gears and center distance calculated can be
carried out to the rest of the gears as well.
4.2.3.4 Determining the Center Distance
Module is assumed to be 3mm in the first iteration and after some iterations comparing
dynamic loads and wear loads module is selected to be 2mm.
Table 8 : Input and Lay Shaft Gear Calculation
Pinion
Gear
No. of Teeth
20
75
P.C.D (mm)
40
150
Addendum (mm)
2
2
Dedendum (mm)
2.5
2.5
Face Width (mm)
15
15
Therefore center distance between shafts =
𝐃𝟏 + 𝐃𝟐
𝟐
= 95 mm
Using gear ratio and center distance, P.C.D. of other gears can be calculated
For pinion and gear wheel of 1st gear,
Let x be the P.C.D. of the pinion,
Then P.C.D. of the gear = G x x = 3.14x
Since center distance should be the same
x + 3.14x = 190
x = 45.87mm
Therefore, P.C.D. of the pinion = 45.87mm and P.C.D. of the gear = 144.13mm
Teeth in pinion = d / m = 45.87 / 2 = 22.938
Teeth in gear = D / m = 144.13 / 2 = 72.06
By rounding off the teeth values exact number of teeth can be calculated and by using module
rounded off pitch circle diameter of the gears can be calculated. These final diameters should align
with the center distance calculated previously.
Likewise calculating for other gears,
Table 9 : Gear Dimensions
Gear
D_Pinion
D_Gear
Teeth_Pinion
Teeth_Gear
Input and Lay shaft
40
150
20
75
1st
46
144
23
72
2nd
68
122
34
61
3rd
84
106
42
53
Reverse
38
122
19
61
4.2.3.5 Determining the teeth strength using Lewis equation
Table 10 : Commonly used Gear Materials [1]
First Grade 20 cast iron was selected and loads were compared and the material strength was not
sufficient. Therefore, next material was selected in repeated iterations and finally settled with the
Grade 35 Grey Cast Iron.
Service factor is considered to be in class II with operation time of up to 8-10 hours per day with
light shocks.
Table 11 : Service Factor for Spur Gears [1]
Cs = 1.25
Transmitted Power = Pt = 370 W
Design Power = Pd = Cs x Pt = 1.25 x 370 = 462.5 W
Design Power = Pd = Wt x (d1/2) x ω1
Therefore, tangential tooth load = Wt = 245.36 N
Table 12 : Allowable Static Stress [2]
Allowable static stress of pinion (Cast Iron) = ( σo )p = 105 MPa
Lewis Form Factor of the pinion (yp)
= 0.154 – 0.912 / T1
= 0.1084
The pitch line velocity (v)
= ω1 d1 / 2
= 94.25 x 0.02
= 1.885 m/s
Therefore, velocity factor (Cv)
= 3 / (3+v)
= 3 / 4.885
= 0.614
Using Lewis Equation,
Strength of the pinion teeth
= ( σo y)p b m π Cv
= 11.382 x 106 x 7.5 x (3 x 10-3)2 x π x 0.614
= 988.2 N
4.2.3.6 Determining the Dynamic Load
WD = WT + W I = W T +
21𝑣(𝑏𝐶+𝑊𝑇 )
21𝑣+ √𝑏𝐶+𝑊𝑇
WD = Total dynamic load
WT = Steady load due to transmitted torque
WI = Increment load due to dynamic action
v = Pitch line velocity
b = Face width of gears
C = A deformation or dynamic factor
Deformation factor can be determined using the following table,
Table 13 : Deformation factor [1]
For cast iron pinion and gear with 200 full depth involute teeth with module 2mm deformation
factor would be 114.
21 𝑥 1.885 𝑥 (7.5 𝑥 2 𝑥 114 + 245.36)
WI = 21 𝑥 1.885 +
√7.5 𝑥 2 𝑥 114 + 245.36
= 176.3 N
WD = WT + WI = 245.36 + 180 = 421.7 N
Load on gear teeth = Wt = 421.7 N < {σo y b m π Cv }p = 988.2 N = Strength of the gear teeth
Therefore, the teeth of this spur gear with a module of 2 mm will have sufficient strength to
transmit the specified power required in this conveyor belt system.
4.2.3.7 Determining Limiting Load for Wear
WW = DP x b x Q x K
Ww = Maximum or limiting load for wear
DP = Pitch circle diameter of the pinion
b = Face width of the pinion
Q = Ratio factor = 𝑇 +𝐺𝑇
V.R. = Velocity ratio = TG / TP
K = Load-stress factor where,
2𝑇
𝐺
K=
(σ𝑒𝑠)2 sin φ
1.4
𝑃
1
1
𝑃
𝐺
(𝐸 + 𝐸 )
σes = Surface endurance limit
φ = Pressure angle
EP = Young's modulus for the material of the pinion
EG = Young's modulus for the material of the gear
K=
(630 x 10^6)2 sin 20
1.4
1
1
(110 𝑥 10^9 + 110 𝑥 10^9) = 1.76
2 𝑥 75
WW = 40 x 7.5 x 2 x 75 + 20 x 1.76 = 1669.87 N
Load on gear teeth = Wt = 425.36 N < WW = 1669.87 N = Limiting load for wear. Therefore, the
teeth of this spur gear with a module of 2 mm will have sufficient limiting load for wear to transmit
the specified power required in this conveyor belt system.
Figure 30 : Gearbox Layout
Figure 31 : Idler Gear Configuration
Final results for each gear is shown below,
Table 14 : Loads acting on the Gears
Gear
Total dynamic
Strength of
Limiting load for
load (N) [Wd]
the gear (N)
wear (N) [Ww]
Gear 1
421.694
988.192
1669.868
Gear 2
421.694
1293.037
30057.640
Gear 3
663.524
1162.046
35684.430
Gear 4
776.849
1273.392
2770.646
Gear 5
1040.168
1328.283
30971.392
Gear 6
1204.360
1357.403
18084.680
Gear 7
661.441
1200.325
35684.430
Gear 8
777.195
1392.456
36018.404
Gear 9
1042.977
1642.694
30971.392
Gear 10
1184.230
1775.271
27579.137
Gear 11
1204.360
1357.403
27579.137
4.2.4 Conclusion
Table 15 : Conclusion of Gear Calculations
Gear
Gear 1
Gear 2
Gear 3
Gear 4
Gear 5
Gear 6
Gear 7
Gear 8
Gear 9
Gear 10
Gear 11
Number of
Teeth (T)
20
75
42
34
23
19
53
61
72
61
19
P.C.D. (mm)
[d]
40
150
84
68
46
38
106
122
144
122
38
Module
(mm) [m]
2
2
2
2
2
2
2
2
2
2
2
Face Width
(mm) [b]
15
15
12
13
14
15
12
13
14
15
15
Material
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
ASTM Class 35 gray iron
4.3 Belt Drive Calculations
Belt drive connects to the output shaft of the gearbox. Need to find the tensions of the belt in order
to do the shaft calculations.
4.3.1 Data
RPM of the output shaft
Power transmitted = 370W
V-belt is selected because it can transmit more power without slip due to increased
friction
4.3.2 Assumptions
Slip between belt and pulley is neglected
4.3.3 Formulas [1]
2.3 log (T1 / T2) = μ θ cosec β
sin α = (d2 – d1) / 2x
θ = 1800 - 2α
B = 1.25b where B = Face width of the pulley and b = face width of the V-belt
4.3.4 Calculating Dimensions
Table 16 : Type of Belt [1]
Figure 32 : V-Belt Dimensions [1]
Since power requirement for this case is limited to 370W Type A belt will be sufficient. Friction
coefficient can be taken from standard tables once pulley and belt materials are known.
Table 17 : Coefficient of Friction for Different Materials [1]
Table 18 : Belt Drive Materials
Belt
Pulley
Friction Coefficient
Materials
Rubber
Cast Iron
0.3
Table 19 : V-belt face width [21]
According to the table,
b = ½ inches = 12.7 mm
Taking b as 13 mm,
B = 1.25 b
B = 1.25 × 12.7
B = 15.875 mm
By the standard width values for pulleys, 16 mm face width can be obtained.
Table 20 : Belt Dimensions [1]
Gear
Type of Belt
First Gear
Second Gear
Third Gear
Reverse Gear
A
A
A
A
Minimum
pitch diameter
of the pulley
(D) [mm]
75
75
75
75
Top Width
(mm) [b]
Thickness (t)
[mm]
Groove angle
(2β)
13
13
13
13
8
8
8
8
32
32
32
32
4.3.5 Calculate Tensions for First Gear
Figure 33 : Belt Drive System
After some iterations diameter of the smaller and larger pulley and centre distance was selected in
order to minimize the tension of the belt.
Diameter of the smaller pulley (mm) [d1] = 80 mm
Diameter of the larger pulley (mm) [d2] = 2 x 80 = 160 mm
Centre Distance (mm) [x] = 1.2 x D = 192 mm
sin α = (d2 – d1) / 2x = (160 – 80) / (2 x 192) = 0.208
α = 12.0240
θ = 1800 - 2α = 1800 – 2 x 12.0240 = 155.950 = 2.72 radians
2.3 log (T1 / T2) = μ θ cosec β
2.3 log (T1 / T2) = 0.3 x 2.72 x cosec (160)
log (T1 / T2) = 1.287
T1 / T2 = 19.36
Belt Velocity = 0.04 x 4 = 0.16 m/s
T1 - T2 = Power / Belt Velocity = 481 / 0.16 = 3006.25 N
T2 = 163.74 N
T1 = 3169.99 N
Similarly tensions for other gear positions can be calculated as well,
Table 21 : Tension of Belt Drive for Different Gear Positions
Gear
First Gear
Second Gear
Third Gear
Reverse Gear
T1 (N)
3169.55
1811.17
1267.82
3169.55
T2 (N)
163.3
93.31
65.32
163.3
4.3.6 Conclusions
Diameter of the smaller
pulley (mm)
Diameter of the larger
pulley (mm)
Centre Distance (mm)
Pulley Face
Width (mm)
80
160
192
16
Figure 34 : Belt Drive Dimensions
4.3.7 Shaft Calculations
4.4 Determining Input Shaft Diameter
4.4.1 Data
RPM of input shaft = 900
Power transmitted = 370W
4.4.2 Assumptions
Neglect the weight of the shafts
Neglect the weight of the gears
Plain shafts are assumed for calculations
4.4.3 Formulas
16
τmax = π∗d3 √(K m M)2 + (K t T)2
Input torque = 𝜔
Tangential load (Wt) = 𝑅𝑎𝑑𝑖𝑢𝑠 𝑜𝑓 𝑔𝑒𝑎𝑟
Radial load (Wr) = Wt × tan(200)
𝑃
𝐼𝑛𝑝𝑢𝑡 𝑡𝑜𝑟𝑞𝑢𝑒
3
D =
16
√1.52 × 8.6162 + 12 × 5.882
𝜋
420×106
1.8
4.4.4 Calculations
Table 22 : Commonly used Shaft Material [1]
Shaft material was selected to be 50 C 12 Steel (AISI 1065) due to its balance between cost
effectiveness and shear strength.
Table 23 : 50C12 Steel Properties [3]
50 C 12 Steel (AISI 1065)
Density
Ultimate tensile strength
Modulus of Rigidity
Allowable Shear Stress
7.85
700
80
224.389
g/cm3
MPa
GPa
MPa
For steel shear strength = 0.577 x UTS = 0.577 x 700 = 224.389 MPa [4]
Km = Combined shock and fatigue factor for bending
Kt = Combined shock and fatigue factor for torsion
Table 24 : Recommended values for Km and Kt. [1]
Since AC induction motors gradually increase the torque,
𝐾𝑚 = 1.5 , 𝐾𝑡 = 1
Safety factor for shear stress = 1.5
Since steel is a ductile material maximum shear stress theory (Guest's theory) can be used to
account for the elastic failure.
According to maximum shear stress criteria,
16
τmax = π∗d3 √(K m M)2 + (K t T)2
𝑃
370
Input torque = 𝜔 = 94.25 = 5.88 Nm
𝐼𝑛𝑝𝑢𝑡 𝑡𝑜𝑟𝑞𝑢𝑒
5.88
Tangential load (Wt) = 𝑅𝑎𝑑𝑖𝑢𝑠 𝑜𝑓 𝑔𝑒𝑎𝑟 = 0.02 = 294.44 N
Radial load (Wr) = Wt × tan(200) = 294.44 × tan(200) = 107.14 N
Figure 35 : Input Shaft
4.4.5 Bending moment Diagrams
Figure 36 : Tangential Bending Moment for Input Shaft [5]
Figure 37 : Radial Bending Moment for Input Shaft [5]
Mt = 8.097 Nm
Mr = 2.946 Nm
Therefore maximum bending moment = √Mt 2 + Mr 2 = 8.616 Nm
Equivalent twisting moment = Te = √(𝐾𝑚 x M)2 + (𝐾𝑡 x T)2
By maximum shear stress criteria,
3
D =
16
√1.52 × 8.6162 + 12 × 5.882
𝜋
420×106
1.8
D = 6.76 mm
Table 25 : Input Shaft Diameter Calculations
Gear 1
Torqu
e
(Nm)
5.888
Tangenti
al force
(N)
294.436
Radial
load (N)
107.144
Tangenti
Radial
al BM BM (Nm)
(Nm)
8.097
2.946
BM
(Nm)
Equivalent
TM (Nm)
8.616
14.202
Shaft
Diameter
(mm)
6.767
4.4.6 Conclusions
Table 26 : Input Shafts Conclusions
Input shaft diameter
10 mm (Standard diameter for calculated value)
Input shaft material
50C12 Steel (AISI 1065)
4.5 Determining Lay Shaft Diameter
4.5.1 Data
RPM of lay shaft = 240
Power transmitted = 370W
4.5.2 Calculations
When taking the forces in the lay shaft need to consider 1st, 2nd, 3rd and reverse gears separately as
forces vary with the gear position.
Figure 38 : Lay Shaft
Table 27 : Lay Shaft Forces
Gear 2
Gear 3
Gear 4
Gear 5
Gear 6
Transmitted Torque
(Nm) [Tt]
22.082
22.082
22.082
22.082
22.082
Tangential force on
gear (N) [Ft]
294.436
525.779
649.492
960.119
1162.249
Radial load on the
tooth (N) [Fr]
107.144
191.328
236.347
349.383
422.937
4.5.3 Bending Moment Diagrams
Figure 39 : Tangential Bending Moment for Lay Shaft in First Gear [5]
Figure 40 : Radial Bending Moment for Lay Shaft in First Gear [5]
Figure 41 : Tangential Bending Moment for Lay Shaft in Second Gear [5]
Figure 42 : Radial Bending Moment for Lay Shaft in Second Gear [5]
Figure 43 : Tangential Bending Moment for Lay Shaft in Third Gear [5]
Figure 44 : Radial Bending Moment for Lay Shaft in Third Gear [5]
Figure 45 : Tangential Bending Moment for Lay Shaft in Reverse Gear [5]
Figure 46 : Radial Bending Moment for Lay Shaft in Reverse Gear [5]
Calculated maximum bending moments using the bending moment diagrams were as follows,
Table 28 : Bending Moments in Lay Shaft [5]
Gear
Position
Maximum bending
moment in
tangential direction
(Mt) [Nm]
59.256
42.709
28.707
29.204
First gear
Second gear
Third Gear
Reverse
Maximum bending
moment in radial
direction (Mr) [Nm]
Maximum
bending moment
(M) [Nm]
21.562
15.541
10.446
10.627
63.057
45.449
30.549
31.077
By maximum shear stress criteria,
16
D3 = 𝜋
√(𝐾𝑚 x M)2 +(𝐾𝑡 x T)2
τ
Table 29 : Shaft Diameter of Lay Shaft
Gear Position
First gear
Second gear
Third Gear
Reverse
Equivalent twisting
moment (Te) (Nm)
97.129
71.661
50.867
51.582
Shaft Diameter
(mm)
13.015
11.760
10.491
10.539
4.5.4 Conclusions
Table 30 : Lay Shaft Conclusions
Lay shaft diameter
15 mm (Standard diameter for calculated value)
Lay shaft material
50C12 Steel (AISI 1065)
4.6 Determining Output Shaft Diameter
4.6.1 Data
RPM of lay shaft = 38.2, 66.8, 95.5, 38.2
Power transmitted = 370W
4.6.2 Calculations
Same as the lay shaft need to consider 1st, 2nd, 3rd and reverse gears separately as forces and torque
transmitted vary with the gear position.
Figure 47 : Output Shaft
Using the formulas found the torque and forces for each gear as follows,
Table 31 : Output Shaft Forces
Gear 7
Gear 8
Gear 9
Gear 10
Transmitted Torque
(Nm) [Tt}
55.5
79.285
138.75
138.75
Tangential force on
gear (N) [Ft]
1047.169
1299.766
1927.083
2274.590
Radial load on the
tooth (N) [Fr]
381.060
472.979
701.257
827.713
4.6.3 Bending Moment Diagrams
Figure 48 : Tangential Bending Moment for Output Shaft in First Gear [6]
Figure 49 : Radial Bending Moment for Output Shaft in First Gear [6]
Figure 50 : Tangential Bending Moment for Output Shaft in Second Gear [6]
Figure 51 : Radial Bending Moment for Output Shaft in Second Gear [6]
Figure 52 : Tangential Bending Moment for Output Shaft in Third Gear [6]
Figure 53 : Radial Bending Moment for Output Shaft in Third Gear [6]
Figure 54 : Tangential Bending Moment for Output Shaft in Reverse Gear [6]
Figure 55 : Tangential Bending Moment for Output Shaft in Reverse Gear [6]
Calculated maximum bending moments using the bending moment diagrams were as follows,
Table 32 : Bending Moment in Output Shaft
Gear Position
Maximum bending
moment in
tangential direction
(Mt) [Nm]
194.635
155.322
190.585
62.551
First gear
Second gear
Third Gear
Reverse
Maximum bending
moment in radial
direction (Mr) [Nm]
Maximum bending
moment (M) [Nm]
70.827
56.521
69.353
22.762
207.122
165.286
202.811
66.564
By maximum shear stress criteria,
16
D3 = 𝜋
√(𝐾𝑚 x M)2 +(𝐾𝑡 x T)2
τ
Table 33 : Output Shaft Diameter
Gear Position
First gear
Second gear
Third Gear
Reverse
Equivalent twisting
moment (Te) (Nm)
404.269
338.847
309.283
295.034
Shaft Diameter
(mm)
20.935
19.739
19.147
18.848
4.6.4 Conclusions
Table 34 : Output Shaft Conclusion
Output shaft diameter
25 mm (Standard diameter for calculated value)
Output shaft material
50C12 Steel (AISI 1065)
4.7 Determining Idler Shaft Diameter
4.7.1 Data
RPM of lay shaft = 38.2
Power transmitted = 370W
Table 35 : Idler Shaft Diameter Calculations
Gear 1
Torque
(Nm)
Tangential Radial Tangential
force (N) load (N) BM (Nm)
Radial
BM
(Nm)
BM
(Nm)
22.083
1162.250
11.630
34.012
422.937
31.962
Equivalent
Shaft
TM (Nm) Diameter
(mm)
55.592
10.806
4.7.2 Conclusion
Table 36 : Idler Shaft Conclusion
Idler shaft diameter
15 mm (Standard diameter for calculated value)
Idler shaft material
50C12 Steel (AISI 1065)
4.8 Summary of the Shaft Calculations
Table 37 : Shaft Calculations Summary
Input Shaft
Lay Shaft
Output Shaft
Idler Shaft
Maximum Bending
Moment (Nm)
8.616449153
63.05748413
253.1417982
34.01229929
Material
50C12 Steel (AISI 1065)
50C12 Steel (AISI 1065)
50C12 Steel (AISI 1065)
50C12 Steel (AISI 1065)
Shaft Diameter
(mm)
10
15
25
15
4.9 Design of Keys
Keys need to be design for both crushing and shearing and also need to consider the effect of the
keyways when doing shaft calculations.
4.9.1 Data
Proportions of standard parallel, tapered and Gib head keys
4.9.2 Assumptions
Sunk keys are used
4.9.3 Formulas
𝒅
𝑻 = 𝒍 × 𝒘 × 𝝉𝒎𝒂𝒙 × 𝟐
𝑻 = 𝒍 × 𝟐 × 𝝈𝒄 × 𝟐
𝒆 = 𝟏 − 𝟎. 𝟐(𝒘/𝒅) − 𝟏. 𝟏(𝒉/𝒅)
𝒕
𝒅
Key length for shear stress
Key length for crushing stress
Effect of the keyway
4.9.4 Design the key on input shaft
Figure 56 : Sunk Key [7]
Since shaft diameter is known key width and thickness can be taken from the standard tables.
Table 38 : Proportions of standard parallel, tapered and Gib head keys [1]
Figure 57 : Key and Keyway Dimensions [1]
Shaft diameter d = 10mm
Therefore, w = 4 mm and t = 4 mm
Calculating key length for shearing strength,
𝑻 = 𝒍 × 𝒘 × 𝝉𝒎𝒂𝒙 ×
𝒅
𝟐
462.5 x
1
2𝜋
900 ∗ 60
= 4 ∗ 10−3 ∗ 𝑙 ∗
420
∗ 0.577 ∗ 106 ∗ 0.005
1.8
𝑙 = 1.822 𝑚𝑚
Calculating key length for crushing strength,
𝑻=𝒍×
462.5 x
𝒕
𝒅
× 𝝈𝒄 ×
𝟐
𝟐
1
2𝜋
900 ∗ 60
= 2 ∗ 10−3 ∗ 𝑙 ∗
250
∗ 0.577 ∗ 106 ∗ 0.005
1.8
𝑙 = 6.123 𝑚𝑚
Since 1.822 mm < 6.123 mm < 15 mm (Face width) key is safe for shearing stress and crushing
stress.
Effect of the keyway,
𝒆 = 𝟏 − 𝟎. 𝟐(𝒘/𝒅) − 𝟏. 𝟏(𝒉/𝒅)
e = 1 – 0.2 ( 4 / 10 ) – 1.1 ( 2 / 10 )
e = 0.7
strength of the shaft with keyway
Effect of the keyway (e) =
strength of the shaft without keyway
Therefore, allowable strength of the shaft with the keyway
= 0.7 x 224.389
= 157.072 MPa
Shaft Diameter with the keyway by maximum shear stress criteria,
3
D =
16
√1.52 × 8.6162 + 12 × 5.882
𝜋
420×106
x 0.7
1.8
D = 7.72 mm
Same procedure was used to ensure lay shaft keys and Pulley keys are safe against shearing and
crushing and key dimensions for each gear is as follows,
Table 39 : Key Dimensions
Gear
Width (mm)
Thickness
(mm)
Gear 1
Gear 2
Gear 3
Gear 4
Gear 5
Gear 6
Gear 11
Smaller Pulley
Larger Pulley
4
6
6
6
6
6
6
10
10
4
6
6
6
6
6
6
5
5
Length for
shear stress
(mm)
Length for
crushing
stress (mm)
Effect of
keyway (e)
2.391
3.986
3.986
3.986
3.986
3.986
3.986
0.45
0.901
3.533
5.888
5.888
5.888
5.888
5.888
5.888
1.332
2.664
0.7
0.7
0.7
0.7
0.7
0.7
0.7
0.981
0.981
4.9.5 Shaft diameters after the effect of the keyway
Table 40 : Final Shaft Diameters
Effect of the
keyway
Input Shaft
Lay Shaft
Output Shaft
Idler Shaft
Pulley Shaft
0.7
0.7
0.7
0.7
0.981
Shaft
Diameter
(mm)
7.722
14.658
20.935
12.17
21.069
Standard Shaft
Diameter
(mm)
10
15
25
15
25
4.10 Bearing Selection for Shafts
4.10.1 Data
NTN Bearing catalogue [19]
Bearing loads obtained in shaft calculations
4.10.2 Assumptions
Bearings are mounted at the ends of each shaft
Bearing life is expected to be 3 years, working 8-10 hours a day
Deep grove ball bearings are chosen since they have low friction, less noise and
vibrations.
4.10.3 Formulas
For ball bearings L10 = (C/P)3, where L10 is the bearing life with 90% reliability, under a given
load and speed.
Figure 58 : Deep Groove Ball Bearing [8]
4.10.4 Calculation
Average L10 life time of a bearing used for conveyors is measured to be about 8000 hours which
roughly converts to about 3 years with 8 hours per day operation.
Table 41 : Bearing Selection
Shaft
Input
Lay
Output
Idler
Left End Bearing
Number
6000
6202
6305
6302
Right End Bearing
Number
6000
6202
6305
6302
L10 life calculated
in hours
25812.10756
10135.17587
8588.153929
25013.56713
Dimensions of the selected bearings according to the catalogue is shown below,
Table 42 : Dimensions of the Selected Bearings
Bearing
Number
6000
6202
6305
6302
Nominal bore
diameter (d)
[mm]
10
15
25
15
Nominal outside
diameter (D)
[mm]
26
35
62
42
Nominal
width (B)
[mm]
8
11
17
13
Ring chamfer
dimension (r)
[mm]
0.5
1
2
1.5
4.11 Spline Design
4.11.1 Assumptions
The shaft and the splines are made out of the same material
Number of teeth of the spline is 16
The pressure angle of spline is 37.50, considering the torque transmitting and by literature
review
Shaft diameter is considered as the minor diameter of the pitch
4.11.2 Data
Diameter of the output shaft = 25mm
4.11.3 Formulas [20]
Torque allowed for the spline =
Allowable shaft torque =
𝜋𝑑3 𝜏
𝜋𝑑𝑝 𝑑𝑟 𝐿𝜏𝑑
16
𝑑
16
Figure 59 : Spline Design Parameters [9]
4.11.4 Calculations
Minor diameter external = Shaft diameter = 25 =
16 − 1.3
𝑃
P = 0.588
Pitch diameter = 16 / 0.588 = 27.21 mm
Major external diameter = 0.588 = 28.91 mm
16+1
The torque allowed for the spline should be more than or equal to allowable shaft torque,
π × 27.21 × 25 × Lτ𝑑
16
=
𝜋 x 253 x 𝜏𝑑
16
L = 22.97 mm
16 − 1.3
Minor diameter internal = 0.588 = 25 mm
16 + 1.6
Major diameter internal = 0.588 = 29.93 mm
4.11.5 Conclusions
Table 43 : Spline Dimensions
Gear
Gear 7
Gear 8
Gear 9
Gear 10
No. of Splines
Minimum
Length of the
spline (mm)
Minor
diameter
internal (mm)
Major
diameter
internal (mm)
Major diameter
internal rounded
(mm)
16
16
16
16
22.96875
22.96875
22.96875
22.96875
25
25
25
25
29.93197279
29.93197279
29.93197279
29.93197279
30
30
30
30
4.12 Coupling Design
4.12.1 Data
Shaft diameter is calculated to be 10mm
Output power of the prime mover is 370W
4.12.2 Assumptions
Sleeve coupling is used since input shaft does not transmit large amount of torque
4.12.3 Formulas
Figure 60 : Sleeve Coupling
𝒅
𝑻 = 𝒍 × 𝒘 × 𝝉𝒎𝒂𝒙 × 𝟐
𝑻 = 𝒍 × 𝟐 × 𝝈𝒄 × 𝟐
𝑻 = 𝟏𝟔 𝐱 𝝉𝑪 (
𝒕
𝝅
𝒅
𝑫𝟒 − 𝒅𝟒
𝑫
Key length for shear stress
Key length for crushing stress
)
For Sleeve Design
4.12.4 Design for Sleeve
Sleeve is designed by considering it as a hollow shaft
𝑇=
𝜋
𝐷4 − 𝑑4
x 𝜏𝐶 (
)
16
𝐷
T = Torque to be transmitted
𝜏𝐶 = Permissible shear stress for the material of the sleeve
𝜋
𝐷4 − 0.014
6
4.9 =
x 14 x 10 x (
)
16
𝐷
Dmin = 13.6 mm
D = 2d + 13mm = 2 x 10 +13 = 33 mm
Since Dmin = 13.6mm < 33mm = D sleeve is safe against shearing
4.12.5 Design for Key
Shaft diameter d = 10mm
Therefore, w = 4 mm and t = 4 mm according to the standard tables
Calculating key length for shearing strength,
𝑻 = 𝒍 × 𝒘 × 𝝉𝒎𝒂𝒙 ×
4.9 = 4 ∗ 10−3 ∗ 𝑙 ∗
320
∗ 0.577 ∗ 106 ∗ 0.005
1.8
𝑙 = 2.39 𝑚𝑚
Calculating key length for crushing strength,
𝒅
𝟐
𝑻=𝒍×
4.9 = 2 ∗ 10−3 ∗ 𝑙 ∗
𝒕
𝒅
× 𝝈𝒄 ×
𝟐
𝟐
250
∗ 0.577 ∗ 106 ∗ 0.005
1.8
𝑙 = 3.53 𝑚𝑚
Length of the sleeve, L = 3.5d = 3.5 x 10 = 35mm
Since 𝑙 = 2.39 𝑚𝑚 < l =3.53mm < L = 35mm key is safe from shearing and crushing. Therefore,
both sleeve and key design is safe.
4.12.6 Conclusions
Table 44 : Coupling Dimensions
Shaft
Diameter
(mm) [d]
10
Outside
diameter of
the sleeve
(mm) [D]
33
Length of the
sleeve (mm)
[L]
Width of the
key (mm)
Thickness of
the key (mm)
Actual Length
of the key
(mm)
35
4
4
35
4.13 Lubrication
4.13.1 Selection of Suitable Lubricant
Table 45 : Pitch Line Velocities of the Gears
Gear
Gear 1
Gear 2
Gear 3
Gear 4
Gear 5
Gear 6
Gear 7
Gear 8
Gear 9
Gear 10
Gear 11
Pitch line velocity
(m/s) [V]
1.885
1.885
1.055
0.854
0.578
0.477
1.06
0.854
0.576
0.488
0.477
Tangential velocity in this case does not exceed 5 m/s. With low tangential speed splash lubrication
will not be able to splash the lubricants properly to other gears. Therefore, grease lubrication was
selected.
Table 46 : Ranges of Tangential Speeds and Lubrication Method for Spur Gears [10]
When selecting the type of lubricant for the gear system, most crucial factor is the viscosity of the
lubricant. Therefore, commercial lubricants are classified according to their viscosity. Following
table guides shows which grade of viscosity should be used based on the application.
Figure 61 : Grease Lubrication
Table 47 : Recommended Viscosity for Enclosed Gears [10]
Since in this case,
Maximum RPM
= 900 rpm
Horsepower
= 0.5 HP
Maximum Reduction Ratio
= 3.75
ISO Viscosity Grade Range = 100-150
Therefore, selected Viscosity Grade = ISO VG 150
From what is available in market to match this grade, Rheolube 374A gear grease was chosen.
[11]
4.14 References
[1] - Khurmi, R. S., & Gupta, J. K. (n.d.). [A Textbook for the Students of A TEXTBOOK OF
MACHINE DESIGN Top. In Engg. Services.
[2] - Permissible Working Stress for Gear Teeth in the Lewis Equation. (2021). Faadooengineers.
http://www.faadooengineers.com/online-study/post/me/machine-design-ii/455/permissibleworking-stress-for-gear-teeth-in-the-lewis-equation , (accessed Dec 1, 2021)
[3] - AZO Materials. (2021). AISI 1065 Carbon Steel (UNS G10650). AZO Materials.
https://www.azom.com/article.aspx?ArticleID=6575 , (accessed Nov 28, 2021)
[4] - wikipedia. (2021). Shear strength. Wikipedia. https://en.wikipedia.org/wiki/Shear_strength ,
(accessed Nov 29, 2021)
[5] - Beamguru. (2021). Beam Calculator. https://beamguru.com/online/beam-calculator/ ,
(accessed Dec 02, 2021)
[6] - SkyCiv. (2021). Beams. https://platform.skyciv.com/beam , (accessed Dec 02, 2021)
[7] - Jignesh Sabhadiya. (2021). haft Key: Definition, Type, And Application. Engineering
Choice. https://www.engineeringchoice.com/shaft-key/ , (accessed Dec 04, 2021)
[8] - Mohd Sufian Othman, M. Z. N. R. M. (2016). Nomenclature of a deep groove ball bearing.
ResearchGate. https://www.researchgate.net/figure/Nomenclature-of-a-deep-groove-ballbearing-5_fig1_283021626 , (accessed Dec 03, 2021)
[9] - Engineersedge. (2021). Involute Spline ANSI B92.1 Equations and Design. Engineersedge.
https://www.engineersedge.com/gears/involute_spline_13649.htm , (accessed Dec 05, 2021)
[10] - KHKgears. (2021). LUBRICATION OF GEARS. KHKgears.
https://khkgears.net/new/gear_knowledge/gear_technical_reference/lubrication-of-gears.html ,
(accessed Dec 07, 2021)
[11] - Nye Lubricants. (2021). Design Engineer’s Guide - Selecting a Gear Box Grease. Nye
Lubricants. https://www.nyelubricants.com/gearbox-grease-guide , (accessed Dec 07, 2021)
[12] - FG Machine. (2021). What’s the Process for Creating a Spur Gear? FG Machine.
https://fg-machine.com/blog/whats-the-process-for-creating-a-spur-gear/ , (accessed Dec 08,
2021)
[13] - SCRIET. (2020). MACHINE DESIGN (UNIT 2ND, SHAFT LECTURE 3). CCS
University. https://ccsuniversity.ac.in/bridge-library/pdf/Engg-0605-AG-LECTUREMACHINE-DESIGN-UNIT-2ND-LECTURE-3.pdf , (accessed Dec 08, 2021)
[14] - FreeASEStudyGuides. (2021). Shift Forks. FreeASEStudyGuides.
https://www.freeasestudyguides.com/manual-transmission-shift-fork.html , (accessed Dec 08,
2021)
[15] - indiamart. (2021). Gear Shifter Fork. Indiamart.
https://www.indiamart.com/proddetail/gear-shifter-fork-21565313155.html , (accessed Dec 08,
2021)
[16] - LADA World. (2021). Gearbox: Output shaft: Circlip. LADA World.
https://ladaworld.com/en/gearboxes/910-input-shaft-2105-1701026.html , (accessed Dec 08,
2021)
[17] - Minispares. (2021). GEARBOX GASKET SET. Minispares Logo.
http://www.minispares.com/product/Classic/AJM804B.aspx , (accessed Dec 08, 2021)
[18] - IndiaMart. (2021). Gearbox Oil Seal. IndiaMart.
https://www.indiamart.com/proddetail/gearbox-oil-seal-13440926812.html , (accessed Dec 08,
2021)
[19] - Ball Bearing Catalogue Page small bearings. (n.d.).
[20] - Jack A. Collins, Henry R. Busby, George H. Staab - Mechanical Design of Machine
Elements and Machines_ A Failure Prevention Perspective-Wiley (2009). (n.d.).
[21] - V-Belt Size Chart - Belt Sizes, Dimensions, & Lengths, MDS,
https://www.mdsofmi.com/v-belt-size-chart/ , (accessed Dec 08, 2021)
[22] - Classic Mackerel Canned Fish 425 g. (2021). Clicksri.Com.
[23] - 3-phase-induction-motor-catalog. (n.d.).
4.15 Annexes
4.16 Detailed Calculation Excel File
https://docs.google.com/spreadsheets/d/19EWngxntyevmTLgk9dbaSu1ss5HzYy1v/edit?usp=sha
ring&ouid=107028206207364628641&rtpof=true&sd=true
4.17 Motor Catalogue
https://drive.google.com/file/d/1yQI8e2A6kN_hp071LKrEyy-XTsCh1ceZ/view?usp=sharing
4.18 Bearings Catalogue
https://drive.google.com/file/d/1uddkn2s8lF30Rb49vSuiYZTZ_Z7b7HHH/view?usp=sharing
4.19 Tables Used
https://drive.google.com/file/d/1P3m3o0bsUyjEommeB0jjil_rsgt7i_Wv/view?usp=sharing
5
Final Design
This design uses a sliding mesh gearbox with spur gears which is one of the most simplistic
gearbox to design and manufacture. Sliding mesh gearbox consists of various sets of gears and
shafts that are arranged together in an organised order and meshing of different gears is done by
the sliding the output gears right or left along a splined output shaft with the help of the gear lever
operated by the operator. Main issue with the sliding mesh gearbox is the fact that speeds of the
input and output shafts should matched when changing gears. Otherwise gearwheels do not align
and crash into one another. In our application gear meshing is done while the system is at rest as
our application does not require to change gears will in the move.
Figure 62: Gearbox Without Casing
Figure 63: Final Gearbox Design
Figure 64: Exploded View
5.1 Operation of the Gearbox
Layout of the gearbox is as follows,
Figure 65: Gearbox Layout
1 – Input Pinion
2 – Input Gear
3 – 3rd Pinion
4 - 2nd Pinion
5 - 1st Pinion
6 – Reverse Pinion
7,8 – 2nd and 3rd Gear Assembly
9,10 – 1st and Reverse Gear Assembly
11 – Idler Gear
This is a 3 forward 1 reverse sliding mesh gearbox layout. Input, Output and Lay shafts are
parallel to each other and input and output shafts lie on the same line as well. 11 gears are used in
total including clutch gear and idler gear. Meshing is done by sliding the gearwheel 7, 8, 9 and 10
along the output shaft.
5.1.1 Neutral Position
Figure 66: Neutral Position
Initially gearbox is at neutral position. Input shaft pinion is meshed with the input gear in lay shaft
as well as reverse pinion in lay shaft is meshed with the idler gear. These gears will be meshed
together throughout the gearbox operation. Output shaft is disconnected from the lay shaft.
Therefore, power is not transmitted to the conveyor system. Speed ratios are obtained by moving
output gears left or right with other gears in the same position as in the neutral position.
5.1.2 First Gear
Figure 67: First Gear Position
When 1st and reverse gear assembly is moved to left side using the shifter fork first gear will be
engaged and power will start to transmit. First gear will give the minimum speed output while
giving the maximum output torque. First gear will be used when carrying the heaviest load which
in this case is the 425g canned fish.
5.1.3 Second Gear
Figure 68: 2nd Gear Position
Before engaging to second gear first gear should be disengaged. For that 1st and reverse gear
assembly should move back to the initial position. Then 2nd and 3rd gear assembly should move to
the right side to engage the 2nd gear. Second gear will have intermediate speed while transmitting
intermediate output torque. It will be useful to carry the medium amount of load which in this case
is the 225g canned fish.
5.1.4 Third Gear
Figure 69: Third Gear Position
Before engaging to third gear second gear should be disengaged. For that 2nd and 3rd gear assembly
should move back to the initial position. Then 2nd and 3rd gear assembly should move to the left
side to engage the 3rd gear. Third gear will have the highest speed while transmitting the lowest
output torque. It will be useful to carry the light weight loads which in this case is the 125g canned
fish.
5.1.5 Reverse Gear
Figure 70: Reverse Gear Position
Before engaging the reverse gear other gears should be disengaged. For that 2nd and 3rd gear
assembly and 1st and reverse gear assemblies should move back to the initial position. Then 2nd
and 3rd gear assembly should move to the left side to engage the 3rd gear. Third gear will have the
highest speed while transmitting the lowest output torque. It will be useful to carry the light weight
loads which in this case is the 125g canned fish.
5.1.6 Shifting Mechanism
Figure 71: Shifting Mechanism
Shifting mechanism is designed to be as simple as possible and easy to manufacture. It consists of
two shift forks which are connected to 1st and reverse assembly and 2nd and 3rd assembly. Shift
forks can be slide along the shift rails which are connected to the gearbox casing. By sliding the
shift fork different gear positions can be achieved.
Figure 72: Shift Rails connecting to the Casing
End of the shift rail is threaded and using a nut, rail can be assembled to the casing. Then one side
of the rail will be fixed with the nut and other side will be fixed to the casing by a step in the rail.
Assembly and disassembly of the shifter mechanism is rather easy too. Top of the shifter fork is
threaded and shift knob is connected by rotating into the fork. First of all, shift knob can be
removed. Then top part of the casing can be removed. Finally, the shift rails can be disassembling
by the nut and shift fork will also can be removed with the shift rail.
Figure 73: Exploded View of the Shifter Mechanism
5.1.7 Lubrication
Grease lubrication is used in the gearbox design as gear wheel tangential speeds are not sufficient
to use splash lubrication. Top casing is removable and it can be used for regular lubrication of the
gearbox.
Figure 74: Disassembled for Lubrication
5.2 Gearbox Components
5.2.1 Input Shaft
Figure 75: Input Shaft
Figure 76: Input Shaft Assembly
Input shaft is connected to the prime mover of the system which is 3 phase AC motor. Step shaft
is used to hold the input gear and bearings in place. If only one bearing is used it has to be fixed in
both directions by casing in order to prevent axial movements. Then it is impossible to disassemble
the bearing from the casing. Therefore, two deep grove ball bearings are used to fix the shaft to
the casing axially. Use of two bearings will help with the bending moments and stress distribution
of the shaft as well.
Figure 77: Stepped Input Shaft
Figure 78: Input Shaft Bearing Assembly
Circlips are used to keep the gears and bearings axially fixed to the shaft. Circlips can be removed
if needed. This allows for ease of disassemble of the gear wheels and bearing when needed.
Gear is connected to the shaft using a key.
Figure 79: Input Key and Keyway
Keyway is cut by milling operations. Therefore, circular part at the end of keyway is inevitable.
This can interfere with the circlips used. To compensate that key and keyway length is reduced
than the face width of the gears from the side where circlip is situated. This will not affect the
design as minimum length of the key required to avoid a failure is way below the actual key length.
Keyway and key has 0.25mm clearance for a tighter fit.
5.2.2 Lay Shaft
Figure 80: Lay shaft
Lay shaft is meshed with the input shaft and transmit power from the input shaft to the output
shaft. Step shaft is used to hold the gears in place. Two deep groove ball bearings are connected at
the end of both sides of the lay shaft. Circlips are used to keep the gears and bearings axially fixed
to the shaft and keys are used to connect gears to the shaft.
Figure 81: Stepped Lay Shaft
Centre of the shaft has the highest diameter and diameter gradually decrease from centre to both
ends. Input and 3rd gears are connected from the left side of the shaft while 1st and 2nd gear assembly
and reverse gear are connected from the right side of the shaft. Here also keys are used to connect
the gears with the lay shaft.
Figure 82: Exploded View of Lay Shaft Assembly
5.2.3 Output Shaft
Figure 83: Output Shaft
Output shaft is meshed with the Lay shaft and transmit power from the Lay shaft to the conveyor
system. Two deep groove ball bearings are used to fix the output shaft to the casing. Circlips are
used to keep the gears and bearings axially fixed to the shaft and splines are used to connect gears
to the shaft.
Figure 84: Splined Output Shaft
Splined shaft is used since gear assemblies needs to be moved axially along the shaft which can’t
be done with the use of keys. 3rd and 2nd assembly is connected from the left side of the shaft while
1st and reverse gear assembly is connected from the right side of the shaft. There is a step in middle
of the shaft in order to prevent moving gears axially more than required. Splines are cut with the
same procedure as cutting spur gears.
Figure 85: Exploded View of the Output Shaft
5.2.4 Idler Shaft
Figure 86: Idler Shaft Assembly
Idler shaft acts as an intermediate shaft between Lay and Output shaft reversing the rotational
direction. Two deep groove ball bearings are used to fix the idler shaft to the casing. Circlips are
used to keep the gears and bearings axially fixed to the shaft and keys are used to connect gears to
the shaft. Size of the pinion and Assembly is identical to the input shaft.
Figure 87: Exploded View of Idler Shaft
Figure 88: Idler Shaft
5.2.5 Casing
Figure 89: Gearbox Casing
Gearbox casing will hold all the mechanical components in the gearbox. Bearings will be fixed to
the casing and shafts are fixed to the casing through bearings. It provides the mechanical support
to parts which rotate in it. In this design casing can be disassembled into main three parts which
can be removed from top and left side. Top part will be used for greasing which will carried out in
regular intervals and left side casing can be removed and used to exit all the parts inside the
gearshift.
5.2.6 Bearings
Figure 90: Bearing
Bearings are used in almost every rotational motions. They will support and guide the shafts
rotational motion while connecting them to the casing. Using bearings will reduce the friction
between shafts and casing.
Figure 91: Bearing Shaft and Casing Connection
Deep groove ball bearings are chosen since spur gears does not produce axial force but only radial
forces. Bearing is fixed to the step of the shaft from one side while other side is fixed by a circlip.
To disassemble the bearing circlip needs to be removed first and then bearing will slide out of the
shaft. By fixing the bearing from both sides will ensure that there will be not any axial movement
of shaft with respect to the bearing. Once bearing is fixed to the casing shaft will be axially fixed
with respective to the shaft.
Figure 92: Bearing fixed to a Shaft using Circlip and Step of the Shaft
5.2.7 Circlips
Circlips are used to prevent the axial movement of gears and bearings with respective to the shaft.
They are used as retaining rings and are manufactured using semi-flexible metal rings.
Figure 93: Circlips
Figure 94: Inserting Circlip to a Shaft
Circlip will sit in a groove cut in the shaft and only the lower half of the ring will be under the
shaft groove and other half will be above the shaft. This upper part will hold the gear or bearing in
place. Circlips can be removed by using circlip pilers.
Figure 95: Circlip Pilers
https://www.wonkeedonkeetools.co.uk/circlip-pliers/how-to-use-circlip-pliers
5.2.8 Oil Seals
Figure 96: Oil Seal
Oil seals are used to protect shafts and bearings from dirt and foreign matter. Also oil seal will
prevent grease or oil going out of the gearbox which is essential in food industry. An oil seal
generally consists of an outer circular metal part and an inner flexible member that does the actual
sealing and is bonded to the metal part by chemical adhesive agents.
5.2.9 Gaskets
A gasket is a seal that is manufactured to fit between two or more surfaces. The gasket is designed
prevent leakage whilst being subjected to varying levels of compression. Gasket will be useful in
removing parts of the gearbox casing in order to keep the IP44 water and dust resistant.
Figure 97: Gaskets
5.2.10 End Caps and End Caps with Shaft Outlets
Figure 98: End Caps
Figure 99: End Cap with Shaft Opening
End caps are used to seal gearbox housings where the shaft does not protrude through the outer
casing. Comprising of a steel cap with a rubber covering they can be used to seal any round bore.
For output and input shafts end caps have a shaft hole as input and output shafts protrude out of
the casing. Idler and lay shaft have end caps without any holes since they both don’t protrude
outside of the gearbox casing. Assembly is done by press fitting and then tighten with nuts and
bolts.
Figure 100: End Cap Assemble
5.3 Manufacturing Process
In this case sliding mesh gearbox with spur gears has been designed. It includes spur gears,
cylindrical shafts with keyways, cylindrical shafts with splines, keys, ball bearings, couplings, belt
drive and selector fork. There are few techniques used in manufacturing process,
Machining (Milling, Turning, Gear Cutting, Thread Cutting)
Heat Treatment (Hardening)
Grinding (Finishing)
Assembling
5.3.1 Manufacturing of Spur Gears
ASTM Class 35 grey cast iron is used to manufacture all the gear wheels. Gears can be machined
due to good machinability of the grey cast iron. Forging process is used to form raw material
needed. Boring process is used to make the internal hole to fit with the shaft. Broaching is used to
make the internal splines in the gears to mesh with the splined shafts. Then external teeth of gears
are manufactured by using a CNC milling machine. Here appropriate cutting speed and part
rotation speed should be maintained in appropriate range to get a good surface finish. Finally,
edges are chamfered by chamfer rolling and finishing touches are added.
Then heat treatment is carried out for these gears by carburizing in order to get higher hardness.
Here part is heated to the temperatures of 9000C to 9300C in the carburizing oven. Then quenching
process and finally tempering process is done.
5.3.2 Manufacturing of Shaft
50 C 12 Steel (AISI 1065) is used to manufacture all the shafts.
Cylindrical steel bars are used to manufacture shafts. Shafts are generally manufactured by hot
rolling and finally turning to the desired size. CNC lathe machining can be used for turning
purposes. Straddle milling can be used to manufacture splined shaft. Milling is used for making
the keyways in shafts as well. Finally, heat treatment can be used for carburizing process.
5.3.3 Manufacturing of Keys
50 C 12 Steel (AISI 1065), the same material as shafts is used to manufacture all the keys. First
of all, produce the key body by material shaping mould. Then thickness, length and side edge
cutting is done by milling process. Finally, heat treatment can be used to harden the material.
5.3.4 Manufacturing of Shifting Forks
Stainless steel AISI 304 is used to manufacture shifter fork.
Mainly shifter forks are manufactured by casting and forging process. The engaging part has an
engaging surface which comes in contact with a coupling sleeve, and the engaging surface is
formed in a bulging shape by high precision aluminium die-casting.
5.3.5 Manufacturing of Casing
Casing mainly compose of three parts which are lower, side and top casings. Each part is machined
separately and mating surfaces are defined. Then the casing parts are assembled. Then bore lines
are machined to make sure of the accuracy of the bores. Various tapped holes are cut for the
attachment of the different components (Nuts & Bolts).
6
Future work
Selected gear material is same for all the gears. More advanced materials with higher strength can
be used for pinions as pinions are the ones to fail first as they have smaller diameters. Gears can
be made of the same material used. This will be costlier to manufacture but gearbox size can be
significantly reduced.
Gears encounter maximum forces at the gear teeth where stress is concentrated. Therefore, gears
can be designed with holes to reduce the overall weight of the gears. For that topology analysis is
needs to be done to determine the stress distribution. This will reduce the initial inertia as well.
Shifter mechanism is easy to manufacture and operate but there is a major flaw in the design that
two gear positions can be meshed at the same time as two gear forks are used. This will lead to
catastrophic failure of the gearbox. Best solution for this is to use only one shifter (H shifter) as
the shifting mechanism.
Figure 101: H Shifter
Gear teeth doesn’t mesh with each other perfectly. If the first gear mesh perfectly then rest of the
gears will have interference. This is due to gear meshing was not taken into consideration when
key and keyway was designed. Need to carefully design the keyway position on the lay shaft such
that gear teeth are meshed perfectly.
Fillets are not used in the lay shaft which have steps. Use of fillets for these steps will help to
reduce the vibrations induced in the gearbox. Need to calculate the perfect fillet radius to minimize
the vibrations. Further vibration analysis will be conducted to minimize the vibrations and
maximize the smooth operation of the gearbox.
Casing is designed without doing an Ansys simulations to determine the stress concentrating
points. By doing a FEA simulation shape of the casing can be optimised for better strength and
compact size. this will help to select the best nut and bolt sizes as well.
7
References
[1] Gear Manufacturing. (n.d.). Retrieved February 23, 2022, from
https://en.wikipedia.org/wiki/Gear_manufacturing#:~:text=Gear%20manufacturing%20refers%2
0to%20the,surface%20finish%20in%20the%20gear. (accessed Feb. 20, 2022)
[2] Shaft Manufacturing Process. (n.d.). Retrieved February 23, 2022, from
https://fzemanufacturing.com/blog/shaft-manufacturingprocess/#:~:text=The%20most%20common%20process%20used,and%20shape%20the%20end
%20product.