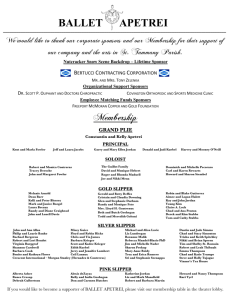
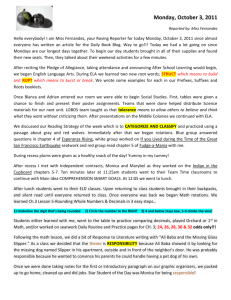
Chinese Journal of Aeronautics, (2018), 31(5): 949–964 Chinese Society of Aeronautics and Astronautics & Beihang University Chinese Journal of Aeronautics cja@buaa.edu.cn www.sciencedirect.com Variable load failure mechanism for high-speed load sensing electro-hydrostatic actuator pump of aircraft Cun SHI, Shaoping WANG, Xingjian WANG *, Yixin ZHANG School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China Received 14 March 2017; revised 7 June 2017; accepted 30 September 2017 Available online 2 February 2018 KEYWORDS Coupling lubrication model; Electro-Hydrostatic Actuator (EHA); High-speed pump; Partial abrasion; Slipper pair; Variable load Abstract This paper presents a novel transient lubrication model for the analysis of the variable load failure mechanism of high-speed pump used in Load Sensing Electro-Hydrostatic Actuator (LS-EHA). Focusing on the slipper/swashplate pair partial abrasion, which is considered as the dominant failure mode in the high-speed condition, slipper dynamic models are established. A forth sliding motion of the slipper on the swashplate surface is presented under the fact that the slipper center of mass will rotate around the center of piston ball when the swashplate angle is dynamically adjusted. Besides, extra inertial tilting moments will be produced for the slipper based on the theorem on translation of force, which will increase rapidly when LS-EHA pump operates under highspeed condition. Then, a dynamic lubricating model coupling with fluid film thickness field, temperature field and pressure field is proposed. The deformation effects caused by thermal deflection and hydrostatic pressure are considered. A numerical simulation model is established to validate the effectiveness and accuracy of the proposed model. Finally, based on the load spectrum of aircraft flight profile, the variable load conditions and the oil film characteristics are analyzed, and series of variable load rules of oil film thickness with variable speed/variable pressure/variable displacement are concluded. Ó 2018 Chinese Society of Aeronautics and Astronautics. Production and hosting by Elsevier Ltd. This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/). 1. Introduction * Corresponding author. E-mail address: wangxj@buaa.edu.cn (X. WANG). Peer review under responsibility of Editorial Committee of CJA. Production and hosting by Elsevier More Electric Aircraft (MEA) is the future development trend for general aircraft, which partially replace the conventional central hydraulic system by local electrically Power-By-Wire (PBW) system. The successful application of PBW technology brings less energy loss and higher efficiency. Among them, Electro-Hydrostatic Actuator (EHA) is the key component of the PBW system, which has already been applied in the large civil aircraft, such as A380 and A350.1–3 However, because of https://doi.org/10.1016/j.cja.2018.01.005 1000-9361 Ó 2018 Chinese Society of Aeronautics and Astronautics. Production and hosting by Elsevier Ltd. This is an open access article under the CC BY-NC-ND license (http://creativecommons.org/licenses/by-nc-nd/4.0/). 950 C. SHI et al. Nomenclature vp ; ap linear reciprocating motion velocity and axial acceleration r, h polar radius and polar angle Fg slipper gravity Fsa slipper inertial force of linear reciprocating motion FaDd slipper inertial force of sliding motion Mgx ; Mgy extra tilt moments produced by slipper Gravity Msax ; Msay extra tilt moments produced by slipper Inertial force of linear reciprocating motion MaDd x ; MaDd x extra tilt moments produced by slipper Inertial force of sliding motion FTs ðp; hÞ friction force between the slipper and swash plate Ts ; Ttx , Tty friction moments between the piston and the slipper socket along the x-, y- and zfs friction coefficient of piston ball bearing force between the slipper and the swash plate along z-axis M2 ; M3 ; M4 anti-overturning torques of the slipper on x-, y- and zq oil density l0 oil viscosity at the initial condition ap ; aT pressure coefficient, temperature coefficient T0 reference temperature d1 , l1 length and diameter of the damping orifices of piston d2 , l2 length and diameter of the damping orifices of slipper oil film thickness shifting rates vector in kth iterah_ ðkÞ tion _ _ F0 ðhÞ jacobi matrix of FðhÞ Ek diagonal matrix to revise Newton iterative method the heating problem, they are just used as standby systems.4 To solve the motor heating problem in EHA, a Load Sensing Electro-Hydrostatic Actuator (LS-EHA) scheme has been proposed, which can solve the heating problem and the dynamic problem simultaneously. The schematic diagram of the LSEHA is shown in Fig. 1. When the LS-EHA works in high load and slow rate conditions, the pump displacement is reduced through decreasing the angle of the swashplate, and the motor speed is improved at the same time to maintain a stable output of the actuator. Hence, the armature current will also be decreased due to the reduction of the motor torque. Consequently, the energy loss can be effectively reduced and the system heating can be limited greatly.5,6 Based on the insightful advantages, LS-EHA should be the future development trend for the next generation of actuation system of aircraft. The LS-EHA system consists of a brushless DC motor, a LS-EHA pump, a Load Sensing Mechanism (LSM), etc. Among them, the LS-EHA pump plays a core role for converting mechanical power into hydraulic power, which directly determines the service life and reliability of the LS-EHA. Fig. 2 shows the cross section of the high-speed pump used in the LS-EHA system, which comprises nine pistons mounted within the cylinder at an equal angular interval around the centerline of the cylinder, the cylinder is pushed towards the fixed valve plate by a compressed cylinder spring, and the compressed spring force is transferred to the spherical cup through several pins so that a hold-down force can be applied on the retainer. The shaft and cylinder are connected by means of a spline mechanism and they are driven around the axis of the main shaft.7 When the shaft is driven by the brushless DC motor, each piston periodically reciprocates within its corresponding cylinder bore due to the inclined swashplate and the retainer. Compared to traditional aircraft hydraulic pump, EHA pump is famous for its high-speed property and smaller displacement to improve power mass ratio. To meet the demands of the MEA era, it usually adopts high rotation speed more than 10000 r/min for the pump. According to MessierBugatti and Parker, they have realized EHA pump with 15000 r/min rotation speed.8 High rotational speed means higher power density, which is the significant feature of the LS-EHA pump. Unfortunately, it will also bring out new severe problems for the LS-EHA pump, in which the most challenging problem is the abrasion of the critical friction lubricating interfaces. Fig. 1 F1 Schematic of LS-EHA system. Variable load failure mechanism Fig. 2 Cross section of high-speed pump used in LS-EHA. There are three key friction pairs in the LS-EHA pump, including the slipper/swashplate pair, the piston/cylinder pair and the cylinder/valve plate pair.9 The oil films of these friction pairs work as lubrication, sealing and bearing, which have a great influence on the service life and reliability of the axial pump. Among these above lubricating interfaces, the cylinder/valve-plate pair is the key friction pair for oil film hydrostatic bearing and produce high-pressure and lowpressure switch, and this friction pair prone to cavitation; piston/cylinder pair is the key factor of the maximum pressure for the pump because of the oil film pressure squeezing point on both ends of the bushing; the lubricating interface between the slipper and the swashplate plays an important role in proper machine operation. On the one hand, the slipper/ swashplate interface serves to seal the gap between the slipper and the swashplate. On the other hand, the entire displacement chamber pressure load exerted on the piston face must be borne by the slipper and transmitted through a fluid film to the swashplate face, which is considered as the weakest link of the LS-EHA pump in high-speed condition. In other words, during high rotation speed, the performance of the slipper/ swash-plate lubricating interface directly determines the performance degradation of LS-EHA pump. In fact, the slipper usually tilts during rotation due to the tilting moment produced by the centrifugal force and the slipper friction force, which will result in a wedged oil-film.10 Especially, the inertial force, including inertial force of the axial reciprocating motion, the inertial force of sliding motion on the swashplate surface as well as the centrifugal force of the elliptical motion, will be rapidly increased when the pump operates at high speed, which will further increase the slipper tilting state. Consequently, the slipper oil film is usually unevenly distributed, and partial abrasions will take place at the points where the oil-film is thinner than the threshold value determined by the surface roughness degree,11 which is the main failure mode for the LS-EHA pump in high-speed condition. To reveal the fluid oil film characteristics of the slipper pair, some theoretical and experimental researches have been carried out to study the lubrication oil film between slipper and swashplate. Xu et al.10–12 developed numerical simulation 951 models for slipper/swash-plate and piston-cylinder pairs based on the elastohydrodynamic lubrication theory. Koc and Hooke13–15 have developed analytical and simple numerical models, coupled with experimental analysis, to investigate slipper operation under different operating conditions, design modifications, and nonflatness. However, the kinematics of these test rigs is different from the practical friction pair, so the slipper tilting state cannot be simulated correctly. Kazama and Yamaguich16 presented a mixed friction model for water hydraulics pump. Bergada et al.17,18 developed full Computational Fluid Dynamics (CFD) models to predict slipper leakage as part of a whole axial piston machine model. The lubrication mechanism and the dynamic behavior of axial piston pumps and motors’ slipper bearings have been studied in Ref.19. Due to the compact structure of the EHA pump, the heating problems cannot be ignored. Especially in high speed, the magnitude of heat generated by viscous friction can be quite significant. To improve the fidelity of the lubricating model, the lubrication characteristics of the slipper pair considering oil thermal effect have been investigated in Ref.20. And a transient thermoelastohydrodynamic lubrication model for the slipper/swashplate has been developed.21 The model considers a nonisothermal fluid model, microdynamic motion of the slipper, as well as pressure and thermal deformations of the bounding solid bodies through a partitioned solution scheme. Also, similar researches for both the piston-cylinder interface22,23 and the cylinder block/valve plate interface24,25 are developed by considering higher fidelity pressure deformation models, stronger coupled fluid structure interaction, as well as solid body temperature distributions/thermal deformations. However, the existing literatures have hardly focused on the slipper/swashplate friction pair of the high-speed pump, which may have different failure mechanisms compared to conventional conditions. The goal of this study is to investigate the variable load failure mechanism of high-speed pump used in LS-EHA based on the lubrication analysis of the slipper pair. In the present work, the detailed motion and force analysis for the slipper are performed. A transient lubricating model considering coupling effects among the fluid film thickness field, temperature field and pressure field is developed. The effects between the variable load and the slipper oil film characteristics are analyzed based on the load spectrum, and a numerical simulation model is established to verify the effectiveness and accuracy of the analysis results. The main contributions of this paper are as follows: (1) This paper focuses on the high-speed pump used in LSEHA, paying much attention to the inertia force and moments, which will be increased rapidly and play an important role in the oil film performance of the slipper pair. (2) A multi-field coupling lubricating model has been proposed, and the elastic deformation as well as the thermal expansion are considered in the proposed model. (3) Based on the load spectrum of the aircraft flight profile, variable load lubrication characteristics are analyzed with respect to variable speed/variable pressure/variable displacement conditions. 952 C. SHI et al. dsp _ ¼ xR sin u tan b þ bRð1 cos uÞ sec2 b dt 2. Slipper kinematics analysis vp ¼ In this section, a precise kinematic analysis for the slipper will be carried out, which are the dynamic boundary conditions for the solution of the proposed transient lubrication model. Firstly, three coordinate systems should be introduced: XYZ system, X1Y1Z1 system as well as xyz system. The XYZ system and X1Y1Z1 system are inertial systems, and X1Y1Z1 system can be obtained by a rotation of XYZ system around the Xaxis clockwise through an angle b: The xyz system is attached to the center of slipper socket and will rotate as slipper rotates along the surface of swashplate, its x-axis is tangential to the trajectory of the center of slipper, and y-axis remains directly radially outward. The axial acceleration of the linear reciprocating motion can be calculated as 2.1. Motion analysis As shown in Fig. 3, the slippers are held tightly against the swashplate by the retainer, and are directly connected with the piston through spherical joints. During rotation, the motions of the slipper are very complicated, which may contain four microdynamic motions at the same time: (A) linear reciprocating motions with piston, which are paralleled to Z axis; (B) Elliptical rotational motion in X1Y1 plane; (C) Spin around z axis; (D) Sliding motion on the surface of swashplate (when the angle of the inclined swashplate has changed Db; all the slippers will overall move a distance as Dd along Y1 axis). (1) Linear reciprocating motion By taking the Outer Dead Center (ODC) where the volume of the piston chamber is the largest as the starting motion point, the linear reciprocating motion velocity of the slipper can be described as Fig. 3 ap ¼ ð1Þ dvp _ sin u sec2 b ¼ x2 R cos u tan b þ 2xbR dt _ 2 Rð1 cos uÞ sec2 b tan b € þ bRð1 cos uÞ sec2 b þ 2ðbÞ ð2Þ where sp is the linear reciprocating motion displacement of the slipper, x represents the angular speed of the cylinder block, R represents pitch radius of the piston bores, u is the rotation _ b € stand for the swashplate angle, angle of the piston, and b; b; angular velocity of swashplate, and angular acceleration of swashplate respectively. Remark 1. According to the working principle of LS-EHA, the swashplate angle of the pump is changed dynamically. Thus, the angular velocity and the angular acceleration of the swashplate cannot be ignored any more during motion analysis, especially when the LS-EHA pump is working in large dynamic phase (such as, aircraft take-off and landing phase), which may be the new problem brought by the pump displacement change. (2) Elliptical rotational motion Driven by the circular motion of the piston, the trajectory of the slipper on the swashplate surface is an ellipse, which is centered at the origin of the X1Y1 plane as shown in Fig. 3. X21 Y2 þ 2 12 ¼1 2 R R sec b Forces/moments acting on piston/slipper of LS-EHA pump. ð3Þ Variable load failure mechanism 953 When the piston rotates an arbitrary angle u from A to B, the rotation angle of the center of slipper is 8 arctanðtan u cos bÞ 0 < u < p2 > > > >p > u ¼ p2 > <2 us ¼ arctanðtan u cos bÞ þ p p2 < u < 3p ð4Þ 2 > > 3p 3p > u¼ 2 > 2 > > : arctanðtan u cos bÞ þ 2p 3p < u 6 2p 2 The elliptical motion angular velocity of the slipper center of mass is du cos b tan u sin b x b_ xs ¼ s ¼ dt 1 þ tan2 u cos2 b cos2 u þ sin2 u cos2 b ð5Þ Considering the effect of the slipper spin motion, the kinematic parameters of an arbitrary point ðr; hÞ, which are derived in Appendix A according to Fig. 4, under the slipper bottom surface can be calculated as vsr ¼ vsr ðr; hÞ ¼ xs qo sin h ð6Þ vsh ¼ vsh ðr; hÞ xz r ¼ ðxs xz Þr þ xs qo cos h where vsr and vsh are the radial velocity and circumferential velocity component of an arbitrary point, qo is the radial distance between slipper center and the origin of the X1Y1Z1 syspffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi tem, qo ¼ R ð1 þ cos2 u tan2 bÞ; and xz is the spin velocity of the slipper. (3) Sliding motion on surface of swashplate When the angle of the inclined swashplate has changed, the slipper center of mass will rotate around the piston ball center under the effect of the slipper gravity, slipper axial inertial force, etc. As shown in Fig. 5, relative to the center of the piston ball o1 , the slipper center of mass o will slide a distance Dd as Dd ¼ Ddmax lsg tan b ð7Þ where Ddmax is the maximum offset distance (when the angle of the swashplate is the maximum value bmax ), lsg is the length between the slipper center of mass and the piston ball center. If the swashplate angle is dynamically changed, the sliding velocity of the slipper vDd can be expressed as vDd ¼ dDd _ sg sec2 b ¼ bl dt ð8Þ Then the sliding acceleration of the slipper aDs on the surface of the swashplate is aDd ¼ dvDd € sg sec2 b 2b_ 2 lsg sec2 b tan b ¼ bl dt ð9Þ Remark 2. The sliding motion on the surface of swashplate will generate an inertial force FaDd along the axis of Y1 . Besides, FaDd will derive a tilt moment. When the swashplate angle of the LS-EHA pump is changed with high frequency, this inertial tilting moment will increase rapidly and will have an inevitable effect on slipper tilt. 2.2. Force analysis The LS-EHA pump is usually characterized as high speed, so the inertia forces of the slipper should not be ignored as many previous references have done. Besides, the slipper and the piston are not regarded as an assembly because the slipper center of mass will rotate around the piston ball center. The internal force Fps between the piston and the slipper can be obtained by the kinetic equation of the piston Fps ¼ pR2p ps þ mp ap þ Ff cos b ð10Þ where Rp is the piston radius, ps is the instantaneous pressure in the piston chamber, mp is the piston mass, and Ff is the friction force. According to the simplification in Ref.10, the friction force Ff can be generated as vp ðps pL Þhp Ff ¼ 2 pRp lk þ hp 2lk ð11Þ where pL is the case drain pressure, hp is the oil film thickness of the piston/cylinder friction pair, and lk is the instantaneous contact length between piston and cylinder bore at a certain swashplate. Forces acting on the center of the slipper can be calculated as 8 > < Fg ¼ ms g Fsa ¼ ms ap > : FaDd ¼ ms aDd Fig. 4 Diagram of motion speed at an arbitrary point under slipper bottom surface. ð12Þ As shown in Fig. 6(a) and (b), three extra tilt moments, which are ignored in previous research, can be generated based on the theorem on translation of force in xyz system as 954 C. SHI et al. Fig. 5 Fig. 6 Slipper sliding motion diagram on surface of swashplate. Detailed force analysis for slipper in LS-EHA pump. Mgx ¼ Fg lsg cos b cos us Mgy ¼ Fg lsg cos b sin us ð13Þ Msax ¼ Fsa lsg sin b cos us Msay ¼ Fsa lsg sin b sin us ð14Þ MaDd x ¼ FaDd lsg cos us MaDd x ¼ FaDd lsg sin us When slipper rotates on the swashplate under a high-speed condition, there will be friction force between the slipper and swashplate, and a tilting moment Md along y-axis can be calculated as Md ¼ ls FTs ðp; hÞ ð15Þ The tilting moment of the slipper Mws along x-axis direction caused by the centrifugal force can be written by 2 cos b tan u sin b _ x b Mws ¼ ms Rlsg 1 þ tan2 u cos2 b cos2 u þ sin2 u cos2 b qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ð1 þ cos2 u tan2 bÞ ð16Þ ð17Þ where ls is the length between the slipper bottom surface and the piston ball center. As shown in Fig. 6(c), the friction moment between the piston ball and the slipper ball socket will make the slipper spin and tilt, which can be obtained as 8 > < Ts ¼ fs F1 Rb cos b Ttx ¼ fs F1 Rb sin b sin us > : Tty ¼ fs F1 Rb sin b cos us ð18Þ Variable load failure mechanism 955 The bearing force and anti-overturning torques between the slipper and the swashplate can be obtained by the integration of the pressure distribution of the lubrication oil film of slipper pair pðr; hÞ as 8 R 2p R R0 2 > > > F1 ¼ pr0 pr þ 0 r0 pðr; hÞrdrdh > > R R > < M2 ¼ 2p R0 pðr; hÞr2 cos hdrdh r0 0 ð19Þ R 2p R R0 > > M3 ¼ 0 r0 pðr; hÞr2 sin hdrdh > > > > : M ¼ R 2p R R0 s r2 drdh 4 0 r0 sh After all the related forces and moments acting on the slipper are obtained, dynamic models of the slipper can be described by equilibrium equations about x-axis, y-axis and z-axis 8 F1 Fps Fs Fg sin b Fsa cos b ¼ ms z€ > > > < M2 þ Mgx þ Msax þ MaDd x þ Ttx þ Mws ¼ Ix €dx > M3 þ Mgy þ Msay þ MaDd y þ Tty þ Md ¼ Iy €dy > > : M4 Ts ¼ Iz x_ z ð20Þ dy where z€ is the acceleration of slipper along z-axis, and € dx , € and x_ z are the angular accelerations along x-axis, y-axis and z-axis respectively. In high-speed pump, the inertia force and moments will be increased rapidly. Inertial tilting moments, including Msax ; Msay ; MaDd x ; MaDd y ; Mws ; etc., will play an important role in slipper tilting. Therefore, Ix , Iy , and Iz are used to describe the moments of inertia of the slipper about x-, y-, z- in xyz system. The following Fig. 7 shows the slipper axial resultant force Fz and moments on x-axis Mx , y-axis My and z-axil Mz . 3. Multi-physics field coupling lubricating model 3.1. Slipper coupling lubricating model The heat conduction in the slipper axial direction can be neglected compared to the heat conduction in the radial direction. The slipper oil temperature distribution can be calculated by solving the energy equation as @T cp q ð21Þ þ v gradT ¼ k divðgradTÞ þ lUD ðvÞ @t where cp is the fluid heat capacity, T is the slipper oil temperature, v is the fluid velocity vector, k is the fluid thermal con- Fig. 7 ductivity, UD is the energy dissipation, and l is the oil viscosity. Viscosity is one of the most important factors affecting the oil drive characteristics. Temperature has a significant influence on the oil viscosity,26,27 and the viscosity-temperature relationship can be described as9 l ¼ l0 exp ap p aT ðT T0 Þ ð22Þ To calculate the precise height of the slipper lubrication oil film, deformation caused by the thermal and the hydrostatic pressure loads should be considered. The thermal expansion DhT of a finite control volume can be described as Z ð23Þ DhT ¼ ½H1 ½DT ½Ef½aT Tðx; yÞgdV V where H is the rigidity matrix, D is the nodal shape function matrix, E is the elasticity modulus matrix, and aT is the thermal expansion coefficient matrix. The elastic deformation Dhp caused by the hydrostatic pressure loads can be Z Z 1 m2 pðn; fÞ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi dndf Dhp ¼ ð24Þ pE X ðx nÞ2 þ ðy fÞ2 where E is the Young’s moduli, m is the Poisson’s ratios and X is the computation domain. Due to the tilting moments, the oil film between the slipper and swashplate is usually wedge-shaped, as shown in Fig. 8. The film thickness at an arbitrary point ðr; hÞ can be calculated as h2 h3 2h1 h2 h3 hðr; hÞ ¼ pffiffiffi r sin h þ r cos h 3R0 3R0 h1 þ h2 þ h3 þ DhT þ Dhp þ 3 ð25Þ where hðr; hÞ is the slipper oil film thickness, h1 , h2 and h3 are the film thickness of three fixed points on the outer edge at an interval of 2=3p, and r0 , R0 are the slipper inside radius and outside radius. Since thickness of the lubricating oil film between the slipper and the swashplate is usually in the range of several micrometers, the flow can be considered as laminar flow, and the fluid can be assumed to be Newtonian. Therefore, the pressure distribution of the slipper oil film can be described by the well-known Reynolds equation. In the cylindrical coordinates, the Reynolds equation can be formulated with respect to the frame as28 Resultant force and moments of slipper in xyz system. 956 C. SHI et al. 1 @p vr ¼ 2l ðz2 hzÞ þ vsr hz is the radial flow velocity distribution @r along z-axis. From Eqs. (21) and (26), one may note that the energy equation and the Reynolds equation are partial differential, and to discretize the partial differential equation, finite difference method has been adopted to obtain the numerical iterative formulations. 3.2. Simulation procedure Fig. 8 Wedge-shaped oil film between slipper and swashplate. 3 1 @ h @p 1 @ h3 @p r þ 2 r @r r @h l @h l @r vsh @h @h @h þ6 þ 12 ¼ 6 vsr @r @t r @h ð26Þ where p is the oil film pressure, and the slipper tilting state can be represented by the terms @h=@r and @h=@h. The pressure boundary conditions of the Reynolds Eq. (26) can be expressed as ( pðr0 ; hÞ ¼ pr pðR0 ; hÞ ¼ pL ð27Þ pðr; 0Þ ¼ pðr; 2pÞ @p ¼ @p @h ðr;0Þ @h ðr;2pÞ where pr is the pocket pressure, and pL is the case drain pressure. Neglecting the complex flow field in the LS-EHA pump due to high rotation speed, the pressure in the case can be considered as a constant. The slipper pocket pressure is determined by the flow continuity equation. The fluid flows into the slipper pocket from the piston chamber via the piston and slipper orifices should be equal to the flows out of the pocket through a variable annular narrow clearance. Thus, the pocket pressure pr can be determined by pr ¼ ps Cpb þ Csb Cpb Csb pd4 Z 2p Z h ð28Þ vr R0 dzdh 0 0 pd4 where Cpb ¼ 128ll1 1 and Csb ¼ 128ll2 2 are leakage flow coefficients of the damping orifices of piston and slipper, and Table 1 The operating parameters of the LS-EHA pump are listed in Table 1, and the pump rotation speed, delivery pressure as well as the swashplate angle have no rated values, but variation ranges. In order to analyze the variable load failure mechanism for the high-speed LS-EHA pump, a numerical simulation model was built in the MATLAB environment to verify the proposed transient lubrication model. As shown in Fig. 9, there are three calculation loops in the simulation procedure. The initial oil film thickness can be random chosen in simulation, and then the pressure distribution and the temperature distribution can be obtained in the first loop. In the second calculation loop, the nonlinear equations are solved by the Newton iterative method. Finally, when the slipper rotates along the swashplate surface, the slipper oil film thickness h1 , h2 , h3 and the slipper spin velocity wz can be updated by the third loop. Remark 3. In the second calculation loop, the classical Newton iterative method is usually used to obtain the oil film thickness shifting rates. However, it is very easy to cause matrix close to singular for Jacobi matrix inversion in MATLAB environment. Therefore, to improve the simulation accuracy, a revised Newton iterative method is proposed to avoid matrix singularity as follows: 1 h_ ðkþ1Þ ¼ h_ ðkÞ F0 ðh_ ðkÞ Þ Fðh_ ðkÞ Þ ð29Þ In particular, the above functions are defined as 8 _ ¼ Ek FðhÞ _ > FðhÞ > < _ ¼ ½Ek FðhÞ _ 0 ¼ Ek F0 ðhÞ _ F0 ðhÞ > > 1 : 0 _ 1 _ _ 1 E1 F ðhÞ ¼ ½Ek F0 ðhÞ ¼ F0 ðhÞ k ð30Þ where Ek ¼ diagð1; 0:001; 0:001Þ is a diagonal matrix. Its diagonal elements can be adjusted for different conditions. Parameters of simulation of LS-EHA pump. Parameter ms ðkgÞ mp ðkgÞ r0 ðmÞ R0 ðmÞ Rb ðmÞ lsg ðmÞ ls ðmÞ ap ðm2 =NÞ cp ðJ=ðkg CÞÞ Value 3 4.68 10 11.82 103 3.25 103 6.75 103 6.75 103 3.5 103 3.5 103 1.8 108 1884 Parameter Value Parameter Value z Rp ðmÞ R ðmÞ d1 ðmÞ l1 ðmÞ k ðN=mÞ xz ðmÞ aT ð CÞ Tin ð CÞ 9 5.0 103 20.0 103 1.0 103 9.8 103 64 103 15.0 103 0.03 50 lðPa sÞ pL ðMPaÞ k ðw=m CÞ q ðkg=m3 Þ E ðPaÞ m x ðr=minÞ ps ðMPaÞ b ð Þ 0.046 0.06–0.08 bar 80 860 4.4 1012 0.32 1000–10000 5–28 1.23–14.5 Variable load failure mechanism 957 Fig. 9 Flowchart of proposed numerical simulation model. 4. Simulation results and analyses 4.1. Simulation results Assumption 1. Based on previous research on the slipper spin, it can be assumed that the slipper spin speed is equal to the shaft speed in low rotation speed condition. In high-speed condition (around 10000 r/min), for simplification, the spin velocity of the slipper can be approximatively selected as xz ¼ 0:25x. Fig. 10 shows the evolution of maximum value, average value and minimum value of the slipper oil film thickness (hMaximum , hAverage and hMinimum ), axial resultant force Fz and moments on x-axis and y-axis Mx and My of the slipper in the first five calculation cycles. After the third cycle, the oil film thickness exhibits a periodic change law, the combined force and moments acting are close to zero. Therefore, the simulation model has been basically converged after three cycles of operation. For the analysis accuracy of oil film characteristics, the simulation results of the fifth cycle are taken for oil film performance analysis. Based on the above analysis, the simulation results of the fifth simulation cycle are taken to be observed, and film thickness, pressure distribution and temperature distribution of the slipper/swashplate pair are presented in Fig. 11. The oil film thickness is unevenly distributed. The maximum value of the oil film thickness always appears in the third quadrant area of xyz system, and the lowest point occurs in the first quadrant. Particularly, with the consideration of the deformation caused by thermal expansion and hydrostatic pressure loads, the oil film thickness field is not a strict wedge-shaped plane. The pressure and the temperature are higher close to the inner edge of the sealing land, accompanied by bigger deformation of the oil film thickness. Therefore, the oil film thickness close to the inner edge of the seal land may be convex outward or concave. Due to the uneven distribution of oil film thickness and the slipper spin phenomenon, the outer edge and the inner edge of the sealing land wear will take place once the minimum oil film thickness is thinner than the surface roughness degree. Especially as the slipper transitions from low to high pressure (around ODC), the oil film thickness is minimal and the slipper tilting is the biggest. To illustrate the indispensable effects of inertia force in the proposed coupling lubrication model, the axial inertia forces, 958 C. SHI et al. Fig. 10 Evolution of oil film between slipper and swashplate (10000 r/min, 28 MPa, 14.5°). centrifugal moments as well as total normal forces under different pump rotation speeds are presented in above Fig. 12. The inertia force and centrifugal moment will increase rapidly when the LS-EHA pump operates in high speed. The maximum value of inertia force can reach 100-400 N, which will have a significant effect on fluid film performance. The large centrifugal moment can further increase the slipper tilting state in high-speed conditions. It can also be seen from Fig. 12(c) that the total normal force will decrease in delivery pressure section, which means that the slipper oil film thickness will gradually increase in the high-pressure area. Similarly, the oil film thickness is going to decrease in the suction pressure area due to the increase of the total normal force. 4.2. Comparison with published results A validation case is chosen from the published papers to verify the developed coupling lubrication model. In Ref.21, Ivantysynova et al. proposed a transient thermoelastohydrodynamic model to predict the lubricating performance between the slipper and the swashplate. It can verify the model accuracy by comparing the simulation results with the results in Ref.21, which plots the minimum, mean, and maximum fluid film thickness between the slipper and swashplate over a shaft revolution as shown in Fig. 13(a). It should be noticed from Fig. 13 that the results in Ref.21 is under 1000 r/min condition. However, the proposed model in this paper is focused on the high-speed pump used in LS-EHA, which is a new structure in aviation field, and the results in this paper are under 10000 r/min. However, it can still be seen that the dynamic tendency of the oil film thickness in this paper is consistent with that in Ref.21. Compared to many previous researches for low-speed pumps, the EHA pump usually operates at high rotation speed (e.g., more than 10000 r/min). In such a high rotation speed, it is extremely difficult to directly measure the slipper fluid film thickness and the leakage flow from slipper/swashplate interface. Alternatively, the pump case drain leakage flow can be measured to indirectly reflect the leakage flow from the slipper interface. Based on the simulated oil film thickness in this paper and Eq. (28), we can get the leakage flow through the slipper/swashplate pair. Comparing the leakage through slipper with the experimental results in Ref.8, we can see that the growth trend of the leakage with an increased pump speed is consistent with that in Ref.8 Furthermore, it can be seen from Fig. 14 that the leakage flow through slipper/swashplate interface at a speed higher than 5000 r/min increased sharply than that at lower speed. According to the research in Ref.9, it has been found that more than 70% of the pump leakage is caused by the friction between valve plate and cylinder block in low-speed pump. However, it can be concluded from Fig. 14 that the leakage through slipper pair will play a dominant role in the total pump case drain leakage flow after 8000 r/min. 4.3. Analysis of variable load characteristics To further analyze the dynamic performance of oil film and to reveal its failure mechanism, as shown in Fig. 15, variable load conditions of LS-EHA pump based on flight profile are going to be analyzed. The aircraft longitudinal control is taken as an example, and the flight profile consists of: Take-off, Initial Climb, Level Accelerating, Climb, Cruise Flying, Descent, Approach, Level Decelerate Flight, and Land. As shown in Fig. 15, combined with the new principles of LS-EHA: (A) in the dynamic process for aircraft attitude adjustment (Fig. 15 (a) bold part), LS-EHA operates in the large dynamic output status. The EHA pump has big swashplate angle for a large pump displacement to improve the dynamic performance of the actuator. Therefore, the LS- Variable load failure mechanism Fig. 11 959 Thickness, pressure and temperature distribution between slipper and swashplate pair (10000 r/min, 28 MPa, 14.5°). EHA pump is in the ‘high pressure/large pump displacement/ high speed’ operating condition, as illustrated in Fig. 15(d)– (f). On the other hand, (B) when the aircraft is in a steady state of constant attitude (such as, Level Accelerating, Climb and Cruise Flying), the swashplate angle should be reduced and the pump speed needs to be increased simultaneously to make the output power remain unchanged. Thus, the motor of LSEHA works in the high efficiency area and the system heating can be limited effectively. Consequently, the EHA of the eleva- tor should be in the ‘low pressure/low displacement/high speed’ operating state. In fact, the EHA operating conditions may be adjusted in real time during flight process. Therefore, the LS-EHA pump is always in the variable load conditions of ‘variable pressure/variable displacement/variable speed’. To reflect the real failure mechanism of LS-EHA pump, rules of the variable load characteristics for the oil film performance of the slipper/ 960 C. SHI et al. Fig. 12 Inertia forces, centrifugal moments and total normal forces under different pump rotation speeds. Fig. 13 swashplate pair should be implemented based on the proposed coupling lubrication model and the variable load conditions. Fig. 16 plots the maximum, mean and minimum oil film thickness of the slipper/swashplate pair compared to different rotation speeds. The oil film thickness varies with the angular position. Based on the analysis of Fig. 12(c), the normal pressing force will decrease during delivery high pressure area. It can be seen from Fig. 16 that the slipper oil film thickness increases gradually and reaches the biggest oil film thickness around the Inner Dead Center (IDC). After that, slipper oil film thickness will decrease due to the increase of the total normal force. The fluid film thickness is the thinnest when the displacement chamber pressure transitions from low to high (around ODC). Therefore, the fluid film thickness of slipper at IDC and ODC are representative throughout the cycle. Fig. 17 shows the slipper fluid film thickness variation with respect to the angular position under different displacement chamber delivery pressure. The average film thickness decreases as the pressure increases, especially around the IDC. Fig. 18 illustrates the oil film thickness changes under different swashplate angles. The average oil film thickness will decrease obviously around ODC. However, it cannot see the change rules near the IDC. To further quantitatively analyze the nonlinear relationship between slipper oil film thickness characteristics and variable load conditions, based on controlling variables method, the pump speed, delivery pressure as well as the swashplate angle (corresponding to the changes of pump displacement) are changed. Taking the IDC and ODC as specific locations, where slipper is in the transition zone from high to low pressure and transitions from low to high area, we analyze the variable load performance for fluid film thickness. As indicated in Fig. 19, when the pump speed increases from 5000 r/min to 10000 r/min, the average film thickness increases from 3 lm to 23 lm at IDC. In this position, the oil film thickness approximately increases linearly with respect to the pump speed. At ODC, when the displacement chamber pressure transitions from low to high, the fluid film thickness has relatively small increase with the increase of pump speed. However, the thickness differences of the maximum value and the minimum value increase as the speed increases at this transition point. It can be seen from Fig. 20 that the slipper oil film thickness at IDC is gradually reduced as the delivery pressure increases, Slipper film thickness comparison between current results and results in Ref.21. Variable load failure mechanism 961 Fig. 14 Slipper interface leakage compared with pump case drain leakage flow in Ref.8. Fig. 15 Analysis of variable load conditions of LS-EHA pump based on flight profile. which are nonlinear decreasing relationships, and the thickness differences are also decreased. The fluid film thickness at ODC is basically unchanged with the pressure change. It means that the effects on the oil film characteristics of pressure change mainly focus on the transition zone from high to low pressure. Fig. 21 shows the relationship between oil film thickness and pump swashplate angle at transition zone. The slipper oil film thickness increases first and reaches the maximum at about 8°, and then decreases with the increase of the pump swashplate angle. The fluid film thickness will always decrease as the swashplate angle increases, and the thickness difference will also decrease with the increase of swashplate angle at ODC. 5. Conclusions A coupling lubrication model for simulating the dynamic lubrication performance between the slipper and swashplate 962 C. SHI et al. Fig. 16 Slipper oil film thickness under different rotation speeds. Fig. 17 Slipper oil film thickness under different delivery pressure. Fig. 18 Slipper oil film thickness under different swashplate angles. pair in the LS-EHA high-speed pump has been developed. Four slipper dynamic models are presented based on the motion analysis and detailed force analysis. The fourth sliding motion on the surface of swashplate is considered due to the dynamic changes of the swashplate angle (pump displacement) in LS-EHA. The inertia forces and moments are specially paid attention to because of the high operation speed conditions. The oil film thickness fields, pressure field as well as temperature field of the slipper pair are established, and the deformation effects caused by thermal deflection and hydrostatic pressure are considered by means of the coupling model. Finally, a series of simulation experiments are performed based on the aircraft flight profile and the following conclusions are drawn. (1) The inertia force increases rapidly in high speed and has a significant impact on the lubrication performance. (2) The slipper fluid film thickness will increase rapidly as the pump speed increases, especially around IDC. At ODC, the film difference will increase as the rotation speed increases. (3) As the delivery pressure increases, oil film thickness around IDC will be gradually reduced, and basically remains unchanged at ODC. (4) With the increase of pump displacement, the average oil film thickness increases first and then decreases at IDC, and the fluid film thickness is always reduced around ODC. Variable load failure mechanism 963 Acknowledgements This work was supported by the National Natural Science Foundation of China (Nos. 51620105010, 51675019 and 51575019), the National Basic Research Program of China (No. 2014CB046402), the ‘‘111” Project, and the Excellence Foundation of BUAA for PhD Students. This work was partially done when the author was visiting DHAAL lab in Duke University with professor Trivedi. Appendix A. Fig. 19 Relationship between oil film thickness and pump speed at transition zone. As shown in Fig. 4, according to the cosine theorem, the equivalent radius qs ðr; hÞ of the arbitrary point is qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi qs ðr; hÞ ¼ q2o þ r2 2qo r cosðp hÞ qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ¼ q2o þ r2 þ 2qo r cos h ðA1Þ The sliding velocity vs ðr; hÞ of an arbitrary point on the bottom surface of the slipper can be calculated as vs ðr; hÞ ¼ xs qs ðr; hÞ ðA2Þ (1) First quadrant According to geometric relationships in Fig. 4(a), an arbitrary point in the first quadrant is selected, and then the angle a between vs and the radius under the slipper radially outward can be described by 8 < sin a ¼ cos p2 a ¼ rþqoq cos h s pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ðA3Þ : cos a ¼ 1 sin2 a ¼ qo sin h qs Therefore, the radial velocity component and the circumferential velocity component can be obtained as vsr ðr; hÞ ¼ vs ðr; hÞ cos a ¼ xs qo sin h ðA4Þ vsh ðr; hÞ ¼ vs ðr; hÞ sin a ¼ xs ðr þ qo cos hÞ Fig. 20 Relationship between oil film thickness and pump delivery pressure at transition zone. (2) Second quadrant Select an arbitrary point from the second quadrant of oxy system, and the following relationships can be obtained according to the trigonometric function 8 < sin a ¼ cos p2 a ¼ cos p p2 a ¼ rþqoq cos h s pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi : cos a ¼ 1 sin2 a ¼ qo sin h qs ðA5Þ It should be pointed out that the direction of the circumferential velocity component is negative. Based on Eq. (A5), the radial component and the circumferential component of the sliding velocity in the second quadrant are vsr ðr; hÞ ¼ vs ðr; hÞ cos a ¼ xs qo sin h ðA6Þ vsh ðr; hÞ ¼ vs ðr; hÞ sin a ¼ xs ðr þ qo cos hÞ Fig. 21 Relationship between oil film thickness and pump swashplate angle at transition zone. (3) Third quadrant As shown in Fig. 4, the direction of the circumferential velocity component is also negative 8 < sin a ¼ sinðp aÞ ¼ cos p a þ p2 ¼ rþqoq cos h s pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi ðA7Þ : cos a ¼ 1 sin2 a ¼ qo sin h qs 964 vsr ðr; hÞ ¼ vs ðr; hÞ cos a ¼ xs qo sin h vsh ðr; hÞ ¼ vs ðr; hÞ sin a ¼ xs ðr þ qo cos hÞ C. SHI et al. ðA8Þ (4) Fourth quadrant Similarly, the same conclusions can be obtained as follows: 8 < sin a ¼ sinðp aÞ ¼ cos p2 ðp aÞ ¼ rþqoq cos h s pffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi : cos a ¼ 1 sin2 a ¼ qo sin h qs vsr ðr; hÞ ¼ vs ðr; hÞ cos a ¼ xs qo sin h vsh ðr; hÞ ¼ vs ðr; hÞ sin a ¼ xs ðr þ qo cos hÞ ðA9Þ ðA10Þ In summary, considering the slipper spin speed xz , the radial velocity component and the circumferential velocity component of an arbitrary point ðr; hÞ under the slipper can be described as vsr ¼ vsr ðr; hÞ ¼ xs qo sin h ðA11Þ vsh ¼ vsh ðr; hÞ xz r ¼ ðxs xz Þr þ xs qo cos h References 1. Chakraborty I, Mavris DN, Emeneth M, Schneegans A. A methodology for vehicle and mission level comparison of More Electric Aircraft subsystem solutions: application to the flight control actuation system. Proc Inst Mech Eng, Part G: J Aerosp Eng 2015;229(6):1088–102. 2. Shi C, Wang XJ, Wang SP, Wang J, Tomovic MM. Adaptive decoupling synchronous control of dissimilar redundant actuation system for large civil aircraft. Aerosp Sci Technol 2015;47:114–24. 3. Wang J, Wang SP, Wang XJ, Shi C, Tomovic MM. Active fault tolerant control for vertical tail damaged aircraft with dissimilar redundant actuation system. Chin J Aeronaut 2016;29(5):1313–25. 4. Shi C, Wang SP, Wang XJ, Wang J, Tomovic MM. Active faulttolerant control of dissimilar redundant actuation system based on performance degradation reference models. J Franklin Inst 2017;354(2):1087–108. 5. Song Z, Jiao XY, Shang YX, Wang S, Hu WN. Design and analysis of a direct load sensing electro-hydrostatic actuator. 2015 International conference on fluid power and mechatronics; Piscataway: IEEE Press; 2015. p. 624–7. 6. Shi C, Wang S, Wang X, Wang J, Tomovic MM. Active faulttolerant controller design for load sensing electro-hydrostatic actuator with optimal reference model. 2016 35th Chinese control conference (CCC); 2016 July 27–29; Chengdu, China. Piscataway: IEEE Press; 2016. p. 6437–42. 7. Zhang J, Chao Q, Wang Q, Xu B, Chen Y, Li Y. Experimental investigations of the slipper spin in an axial piston pump. Measurement 2017;102:112–20. 8. Zhang J, Chao Q, Xu B. Analysis of the cylinder block tilting inertia moment and its effect on the performance of high-speed electro-hydrostatic actuator pumps of aircraft. Chin J Aeronaut 2018;31(1):169–77. 9. Han L, Wang S, Zhang C. A partial lubrication model between valve plate and cylinder block in axial piston pumps. Proc Inst Mech Eng, Part C: J Mech Eng Sci 2015;229(17):3201–17. 10. Xu B, Wang Q, Zhang J. Effect of case drain pressure on slipper/ swashplate pair within axial piston pump. J Zhejiang Univ – Sci A 2015;16(12):1001–14. 11. Xu B, Zhang JH, Yang HY. Investigation on structural optimization of anti-overturning slipper of axial piston pump. Sci China Technol Sci 2012;55(11):3010–8. 12. Xu B, Zhang JH, Yang HY, Zhang B. Investigation on the radial micro-motion about piston of axial piston pump. Chinese J Mech Eng 2012;26(2):1–9. 13. Koc E, Hooke C, Li K. Slipper balance in axial piston pumps and motors. J Tribol 1992;114(4):766–72. 14. Koc E, Hooke CJ. Investigation into the effects of orifice size, offset and overclamp ratio on the lubrication of slipper bearings. Tribol Int 1996;29(4):299–305. 15. Koc E, Hooke CJ. Considerations in the design of partially hydrostatic slipper bearings. Tribol Int 1997;30(11):815–23. 16. Kazama T, Yamaguchi A. Application of a mixed lubrication model for hydrostatic thrust bearings of hydraulic equipment. J Tribol 1993;115(4):686–91. 17. Bergada JM, Watton J, Haynes JM. The hydrostatic/hydrodynamic behaviour of an axial piston pump slipper with multiple lands. Meccanica 2010;45(4):585–602. 18. Bergada JM, Kumar S, Davies DL, Watton J. A complete analysis of axial piston pump leakage and output flow ripples. Appl Math Model 2012;36(4):1731–51. 19. Borghi M, Specchia E, Zardin B. Numerical analysis of the dynamic behaviour of axial piston pumps and motors slipper bearings. SAE Int J Passenger Car: Mech Syst 2009;2(1):1285–303. 20. Hesheng T, Yaobao Y, Jing L. Lubrication characteristics analysis of slipper bearing in axial piston pump considering thermal effect. Lubr Sci 2016;28(2):107–24. 21. Schenk A, Ivantysynova M. A transient thermoelastohydrodynamic lubrication model for the slipper/swashplate in axial piston machines. J Tribol 2015;137(3):031701. 22. Pelosi M, Ivantysynova M. Heat transfer and thermal elastic deformation analysis on the piston/cylinder interface of axial piston machines. J Tribol 2012;134(4):041101. 23. Pelosi M, Ivantysynova M. A geometric multigrid solver for the piston–cylinder interface of axial piston machines. Tribol Trans 2012;55(2):163–74. 24. Zecchi M, Ivantysynova M. Cylinder block/valve plate interface – a novel approach to predict thermal surface loads. 8th IFK international conference on fluid power; 2012. p. 285–98. 25. Zecchi M, Ivantysynova M. An investigation of the impact of micro surface shaping on the cylinder block/valve plate inter-face performance through a novel thermo-elasto-hydrodynamic model. The 7th FPNI PhD symposium on fluid power; 2012. p. 589–610. 26. Balaras E. Modeling complex boundaries using an external force field on fixed Cartesian grids in large-eddy simulations. Comput Fluids 2004;33(3):375–404. 27. Xie FW, Hou YF, Yang P. Drive characteristics of viscous oil film considering temperature effect. J Fluid Eng 2011;133(4):044502. 28. Beschorner K, Higgs CF, Lovell M. Solution of Reynolds equation in polar coordinates applicable to nonsymmetric entrainment velocities. J Tribol 2009;131(3):034501.