DIgSILENT PowerFactory
Application Example
Battery Energy Storing Systems
BESS
DIgSILENT GmbH
Heinrich-Hertz-Str. 9
72810 - Gomaringen
Germany
T: +49 7072 9168 00
F: +49 7072 9168 88
http://www.digsilent.de
info@digsilent.de
Copyright ©2010, DIgSILENT GmbH. Copyright of this document belongs to DIgSILENT GmbH.
No part of this document may be reproduced, copied, or transmitted in any form, by any means
electronic or mechanical, without the prior written permission of DIgSILENT GmbH.
Battery Energy Storing Systems (BESS)
1
Contents
Contents
1 Introduction
3
2 BESS Simulation Model
3
2.1 Battery Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
2.2 Voltage Sourced Converter (VSC) . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.2.1 Short Circuit Calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3 The BESS Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.4 Testing the BESS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
3 Network Model
15
4 Application Case 1: Frequency Regulation
18
4.1 Replacement of Primary Control Energy (Load Change) . . . . . . . . . . . . . .
18
4.2 Replacement of Primary Control Energy (Generator Outage) . . . . . . . . . . .
22
5 Application Case 2: FRT Simulation
25
References
28
Battery Energy Storing Systems (BESS)
2
2
BESS Simulation Model
1
Introduction
Large Battery Energy Storage Systems (BESS) are being increasingly used in Flexible AC
Transmission Systems (FACTS) applications as a way to improve the voltage, frequency, oscillatory and/or transient stability of the system and hence enhance the reliability of power supply.
These applications include different FACT controllers, where the storage devices are interfaced
with the power system through either shunt- or series-connected voltage sourced converters
(VSC).
This document describes the assessment of a BESS to replace the spinning reserve/primary reserve in a test network. The document gives the reader guidance on how to perform the analysis
in the simulation tool PowerFactory (PDF). This BESS application becomes significantly important in small or island power system, with rather low spinning reserve, where load perturbations
have a considerable effect on the network frequency.
In the first part of this application guide describes the relevant characteristics of the test network
and discusses all modelling and project organisational issues that must be taken into account
when setting up the model in PDF. Secondly, all required dynamic models, including the battery
and the shunt VSC controller models, are presented and verified. Finally, different cases are
simulated and results discussed.
For a better usability are the names of the study cases of the project as well as the important
steps in PowerFactory given. This parts are marked in italic. So the reader could use the
document in parallel with the PowerFactory project of the BESS.
2
BESS Simulation Model
A battery energy storing system (BESS) consists of two parts. Firstly a storing part that could
store/restore energy in an electrochemical process. Secondly a rectifier/inverter that could
transform the DC-voltage from the storing part to the AC-voltage needed for the grid and vice
versa. The rectifier/inverter is normally based on a voltage sourced converter (VSC) with a
pulse width modulation (PWM). This element is well known and available in PowerFactory . The
storing part in this case a rechargeable battery is an element that depends on the actual application. The problem with batteries is the huge diversity of the technologies and also the variety
inside one technology. So there is no easy, accurate model, valid for all batteries [4][3][2][5].
2.1
Battery Model
There are two main challenges with battery models. The first problem is to get a model that
is not too complex but accurate enough. The second problem is to get the parameters from
manufacturers or own measurements needed for the model. Only a model with appropriate
parameters could deliver good results.
Common batteries in the industry are often lead-acid batteries. But there are also a lot of other
types like nickelcadmium (NiCd), nickel-metal hybrid (NiMH) and several lithium-ion types. Each
type has its own assets and drawbacks.
To design a good model for a battery is a science on itself. Different approaches could be found
in [3], [2] and [5]. A battery model should depict the terminal voltage and the internal resistance
which are a function of several intern-related variables such as the Battery State of Charge
(SOC), the age and temperature of the battery [5]. The State of Charge corresponds to the
current loading state of the battery. The battery is fully loaded if the SOC is one and it is zero if
Battery Energy Storing Systems (BESS)
3
2
BESS Simulation Model
the battery is empty.
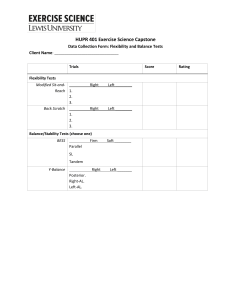
A simple electric equivalent for a battery together with a more complex equivalent with parasitic
path is shown in Figure 2.1. It depends on the application case which model will be used. There
is an important equation for the capacity of all lead-acid batteries, called ”Peukert’s law” (1). It
expresses the capacity of a battery in terms of the rate at which it is discharged. As the rate
increases, the battery’s available capacity decreases.
Cp = I k t
(1)
Cp is the capacity according to Peukert, at a one-ampere discharge rate, expressed in Ah.
I is the discharge current, expressed in A.
k is the Peukert constant, dimensionless.
t is the time of discharge, expressed in h.
Table of Contents
For a lead-acid battery, the value of k is typically between 1.1 and 1.3. The problem with
Peukert.s law is, that at a discharge current of zero, the available capacity becomes infinity.
Figure
2.1: Battery
Electric
Equivalent, (a)
(a) simple,
(b)(b)
with
parasitic
reaction
[5]
Figure
1: Battery
Electric
Equivalent,
simple,
with
parasitic
reaction
[4]
The discharge voltage of a battery is also dependent on the SOC as exemplarily shown in the picture below.
The discharge voltage of a battery is also dependent on the SOC as exemplarily shown in
that the
voltage
is nonlinearly
dependent
on the dependent
SOC, especially
0 < SOC < 0.2.
the obvious,
picture below.
It isbattery
obvious,
that the
battery voltage
is nonlinearly
on theforSOC,
especially for 0 < SOC < 0.2.
3
2,5
Internal Resistance
Discharge Voltage
2
1,5
2
Voltage [V]
Resistance [ W ]
2,5
1,5
4
1
0,5
Battery Energy
0 Storing Systems (BESS)
0
0,2
0,4
0,6
State of Charge (SOC)
0,8
1
Figure 1: Battery Electric Equivalent, (a) simple, (b) with parasitic reaction [4]
2 The
BESS
Simulation
Model
discharge
voltage
of a battery is also dependent on the SOC as exemplarily shown in the picture below. It is
obvious, that the battery voltage is nonlinearly dependent on the SOC, especially for 0 < SOC < 0.2.
3
2,5
Internal Resistance
Discharge Voltage
2
1,5
2
Voltage [V]
Resistance [ W ]
2,5
1
0,5
0
1,5
0
0,2
0,4
0,6
0,8
1
State of Charge (SOC)
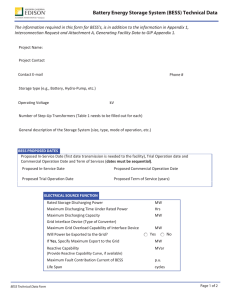
Figure 2: Typical
Discharge
Profile
of a Lead-Acid
Battery [7]
Figure
2.2: Typical
Discharge
Profile of a Lead-Acid
Battery [1]
Also the internal resistance is dependent on the SOC (Figure 2). Again the nonlinearity is obvious, especially for
Also
internal
is dependent on the SOC (Figure 2.2). Again the nonlinearity is
low the
values
of theresistance
SOC.
obvious, especially for low values of the SOC.
Thereare
arenonogeneral
generalempirical
empiricalequations
equationsavailable
availabletotodescribe
describethe
thebehaviour
behaviourofofarbitrary
arbitrarybatterbatteries. But if there is
There
ies.
But
if
there
is
a
detailed
datasheet
for
one
specific
battery
it
is
possible
to
use
that
data
in a
a detailed datasheet for one specific battery it is possible to use that data in a PowerFactory
DSL model. The data
PowerFactory
DSL
model.
The
data
could
be
stored
in
a
oneor
two
dimensional
array
and
then
could be stored in a one- or two dimensional array and then used in a DSL model. Such a battery model would be
used in a DSL model. Such a battery model would be more accurate for one specific battery.
more accurate for one specific battery. But it is not easy to obtain the needed manufacturer data.
But it is not easy to obtain the needed manufacturer data.
InInthe
Someassumptions
assumpthefollowing
followinga asimplified
simplifiedbattery
batterymodel
modelforfora ashowcase
showcaseBESS
BESS is
is presented.
presented. Some
are made to get
tions are made to get a simple, but functional model. At first, it is assumed, that the battery is
a simple, but functional model. At first, it is assumed, that the battery is only discharged down to 20%. In that
only discharged down to 20%. In that case the voltage could be assumed as linearly dependent
voltage
could bethe
assumed
linearly dependent
on as
theconstant
SOC. Additionally
internal
oncase
the the
SOC.
Additionally
internalasresistance
is assumed
because itthe
has
to be resistance is
assumed
as
constant
because
it
has
to
be
anyway
very
small
due
to
the
high
current
application.
The battery
anyway very small due to the high current application. The battery capacity is assumed as conA
p
p
l
i
c
a
t
i
o
n
M
a
n
u
a
l
:
S
i
m
u
l
a
t
i
o
n
o
f
a
B
E
S
S
w
i
t
h
P
o
w
e
r
F
a
c
t
o
r
y
3
stant, this is valid if the discharge current is known in advance. So the expected capacity could
be calculated and inserted in the data of the model. If the battery is discharged at other rates
than assumed before the capacity has to be recalculated and changed in the battery model
parameters.
With the assumptions above the battery model will be similar to the equivalent simple model
in Figure 2.1 with a constant inner resistance Z(s,SOC)=Z and a voltage source with a voltage
dependent on the SOC. This is detailed enough for an application case but for a detailed study
is also a detailed battery model needed. The equation for the model is given in 2. The SOC is
calculated with an integrator, counting the current of the battery.
UDC = Umax · SOC + Umin · (1 − SOC) − I · Zi
Battery Energy Storing Systems (BESS)
(2)
5
2
BESS Simulation Model
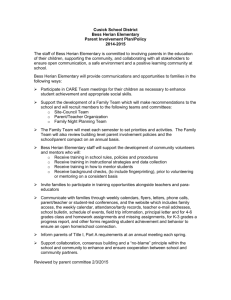
The implementation of the battery model is done in DSL (Figure 2.3). Only the DC-current is
needed as input signal to the model. The model gives out the outer DC-voltage, the SOC and
also the DC-cell-voltage which is may be needed for a charge controller.
Unit
V
V
Ah
Int
Int
Ohm
kV
Int
Description
Cell voltage of discharged cell.
Cell voltage of fully loaded cell.
Capacity of one cell for the used discharge current (see Peukert’s law)
Amount of parallel connected cells (increases the total capacity).
Amount of serial connected cells (increases the output voltage).
Internal resistance per cell (average value).
Voltage rating of the connected DC-busbar.
State of Charge at the beginning of the Simulation.
Table of Contents
DIgSILENT
Variable
u min
u max
CellCapacity
CellsParallel
CellsInRow
RiCell
Unom
SOC0
SimpleBattery:
kA to A
K
RiCell
K
1000
u_Ri
Lim >min
-
Ucell
0
u_intern
0
Normalize
CellsInRow ,Unom
I
1/K
CellsParallel
1/sT
-3.6
1/K
CellCapacity
Vterm
1
internVoltage
u_min,u_max
kA
kA to A -> Ah
SOC - State of Charge
2
ICell
3
Figure 3: Simplified Battery Model in DSL (*.BlkDef)
Figure 2.3: Simplified Battery Model in DSL (∗ .BlkDef)
The integrator (1/sT) that counts the current in- and output of the battery needs an initial condition (SOC0). This
value is part of the model parameters. During the initialisation process it is assumed, that the battery is not being
The
integrator
(1/sT)Sothat
the current
andBESS
output
of for
thethe
battery
needs an initial condicharged
or discharged.
the counts
active power
exchangeinof the
is zero
load flow.
tion (SOC0). This value is part of the model parameters. During the initialisation process it is
assumed,
the inbattery
is notinbeing
charged
or discharged.
So the
active
power
of
The batterythat
appears
PowerFactory
the single
line diagram
as a DC-voltage
source.
To apply
the exchange
voltage
the
BESS
is
zero
for
the
load
flow.
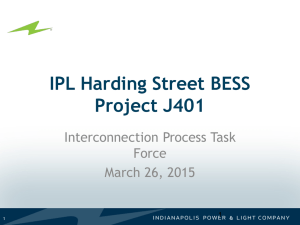
output of the battery model (Figure 3) to the DC-voltage source is a DSL-frame needed (Figure 4).
The battery appears in PowerFactory in the single line diagram as a DC-voltage source. To apply
the voltage output of the battery model (Figure 2.3) to the DC-voltage source is a DSL-frame
Vterm
DC-Voltage Source
needed (Figure 2.4).
ElmDcu
0
DC-Current Measurement
StaImea*
I
Battery_Model
ElmDSL
Battery Energy Storing Systems (BESS)
1
2
3
Ucell
SOC
ICell
0
1
2
6
Figure 3: Simplified Battery Model in DSL (*.BlkDef)
The integrator (1/sT) that counts the current in- and output of the battery needs an initial condition (SOC0). This
value is part of the model parameters. During the initialisation process it is assumed, that the battery is not being
charged or discharged. So the active power exchange of the BESS is zero for the load flow.
2
BESS Simulation Model
The battery appears in PowerFactory in the single line diagram as a DC-voltage source. To apply the voltage
output of the battery model (Figure 3) to the DC-voltage source is a DSL-frame needed (Figure 4).
0
DC-Current Measurement
StaImea*
I
Battery_Model
ElmDSL
Vterm
DC-Voltage Source
ElmDcu
Ucell
1
SOC
2
ICell
3
0
1
2
Figure 4: Frame for the Battery Model in DSL (*.BlkDef)
Table of Content
Figure 2.4: Frame for the Battery Model in DSL (∗ .BlkDef)
2.2
Voltage Sourced Converter (VSC)
1.2 Voltage Sourced Converter (VSC)
Application Manual: Simulation of a BESS with PowerFactory
5
The VSC converts the DC-voltage from the battery to an AC-voltage through fast switching of
IGBT-valves.
The VSC converts the DC-voltage from the battery to an AC-voltage through fast switching of IGBT-valve
Figure
Equivalent
Circuit
a PWM
Converter
Figure
5:2.5:
Equivalent
Circuit
of aofPWM
Converter
The switching signal, also called amplification factor (Pm), comes from the control system of the VSC. Th
The switching signal, also called amplification factor (Pm), comes from the control system of the
also be expressed for a fundamental frequency model as:
VSC. This could also be expressed for a fundamental frequency model as:
U
UACr = K0 P mr UDC ACr
U
UACi = K0 P mi UDC ACi
= K0 PmrU DC
= K0 PmiU DC
(3)
(4)
UACrreal,
and U
respectively
imaginary
of the AC-voltage.
Pmalready
is the already mentioned ampl
UACr and UACi is the
respectively
part
of the part
AC-voltage.
Pm is the
ACi is the real,imaginary
factorfactor
and UDC
is the
DC-voltage
of the battery.
constantK0
factor,
mentioned amplification
and
UDC
is the DC-voltage
of Kthe
battery.
is adepending
constant on the used PWM-met
0 is a
factor, depending onsinusoidal
the usedmodulation:
PWM-method. For sinusoidal modulation:
√
3
K0 = √
2 3
K0 =
3
2 2
(5)
For |Pm|≤1 the equations above are valid. If Pm becomes bigger than one there are problems with harm
For |P m| ≤ 1 the equations
above are valid. If Pm becomes bigger than one there are problems
it has
to be
secured,that
thatthe
theDC-voltage
DC-voltage is
certain
level:
with harmonics. So itSohas
to be
secured,
isalways
alwaysover
overa a
certain
level:
2 2
√
U DC ³
U AC
2 2
UDC ≥ √ | UAC |
3
3
(6)
This could also be showed in Figure 6.
Battery Energy Storing Systems (BESS)
7
2
BESS Simulation Model
Table of Contents
This could also be showed in Figure 2.6.
Figure
2.6:
Saturation
of a VSC PWM
with Sinusoidal PWM
Figure 6: Saturation
of a
VSC
with Sinusoidal
ThePowerFactory
PowerFactoryPWM-converter
PWM-converter model
model has
that
case the “id_ref” and
The
has different
different possible
possibleinput
inputcombinations.
combinations.For
For
that
“iq_ref”
input
is and
used.”iqThis
the current
in a dq-reference frame. The
case
the ”id
ref”
ref”isinput
is used.phasor
This of
is the PWM-converter
current phasor transformed
of the PWM-converter
transformed
in the
a dq-reference
frame.
advantage
transformation
is that
”id ref”
advantage of
transformation
is that The
“id_ref”
equates of
to the active
power output
of the
converter and “iq_ref”
equates
to
the
active
power
output
of
the
converter
and
”iq
ref”
equates
to
the
reactive
power
eauates to the reactive power of the PWM-converter. So it is easy to implement a controller for the BESS. The
of the PWM-converter. So it is easy to implement a controller for the BESS. The PWM-model
PWM-model uses an internal current controller to generate the actual signal for the modulation factor.
uses an internal current controller to generate the actual signal for the modulation factor.
1.2.1Short
Short
Circuit
Calculation
2.2.1
Circuit
Calculation
Short circuit calculation according to IEC60909 / VDE0102 is not possible with a BESS because devices with
Short
circuit
calculation
according
to IEC60909
VDE0102
is not
with
a BESS
becauseoffers also the
power
electronics
like the
PWM-converter
are /not
considered
bypossible
the norm.
But
PowerFactory
devices with power electronics like the PWM-converter are not considered by the norm. But
possibility to calculate a short circuit according to the so called complete method. The complete method takes
PowerFactory offers also the possibility to calculate a short circuit according to the so called
also the method.
load flow The
into complete
account. Furthermore
is possible
to flow
configure
the PWM-converter
model
for the complete
complete
method takesit also
the load
into account.
Furthermore
it
circuit
options are constant
current
or constant
voltage.
an IGBT-based
converter
isshort
possible
to method.
configureThe
thetwo
PWM-converter
model for
the complete
short
circuit For
method.
The
two
options
are
constant
current
or
constant
voltage.
For
an
IGBT-based
converter
would
be
would be ‘constant I’ the right choice because the valves of the converter are only designed for a certain
”constant
I”.current.
the rightTo
choice
because
the valves
of the
converter
are only
designed
a certain
maximum
obtain
the maximum
current
with
the complete
short
circuit for
method
the PWM-converter
maximum current. To obtain the maximum current with the complete short circuit method the
has to be configured to full active power on the load flow page. Better results could be achieved with a RMS
PWM-converter has to be configured to full active power on the load flow page. Better results
simulation
this is with
described
chapter 4 this
(only
symmetrical
cases). 5 (only symmetrical cases).
could
be achieved
a RMSinsimulation
is described
in chapter
BESS
Controller
1.3TheThe
BESS
Controller
2.3
Before
Beforea acontroller
controllercould
couldbe
beimplemented
implementeditithas
hastotobe
beclear
clearwhat
whatthe
thetask
taskofofthe
thecontroller
controlleris.is.InIn the case of the
the case of the BESS with an IGBT-based converter there are two current parameters to control,
BESS with an IGBT-based converter there are two current parameters to control, one in the d-axis and one in the
q-axis. This equates to the real and reactive power. With the real power output it is possible to control the
Battery
Energy
Systems
(BESS)
8 be controlled.
frequency
of aStoring
grid with
synchronous
generators. With the reactive power could the AC-voltage
The reactive power output of the BESS is not bound to the battery capacity, so the AC-voltage could be controlled
continuously. But the apparent power of the PWM-converter is limited and so the reactive power (1.7).
2
BESS Simulation Model
one in the d-axis and one in the q-axis. This equates to the real and reactive power. With the
real power output it is possible to control the frequency of a grid with synchronous generators.
With the reactive power could the AC-voltage be controlled. The reactive power output of the
BESS is not bound to the battery capacity, so the AC-voltage could be controlled continuously.
But the apparent power of the PWM-converter is limited and so the reactive power (7).
S=
p
P 2 + Q2
(7)
There are more boundary conditions that have to be considered:
• The BESS could only consume active power if the battery is not fully loaded (SOC < 1).
• The BESS could only supply active power if the battery is not discharged (SOC > 0).
• The battery should be recharged if the SOC is below a certain level. So that the BESS
has always the ability to control the active power in both ways.
• The total output of active and reactive power should together not be bigger than the apparent rated power, according to (7). Hence a priority for the active or reactive power is
needed.
All the conditions could be fulfilled from a charge controller. For the showcase it was assumed,
that the SOC is available as a signal. In a real application the SOC has to be calculated from
the battery current and voltage.
When all tasks and conditions for the controller are known the design in DSL could be started.
For a better overview it is recommended to divide the whole controller in smaller parts:
• Frequency controller (Frequency Control)
• Active/reactive power controller (PQ-Control)
• Charging controller (Charge Control)
Together with the needed measurement devices we get the structure showed in Figure 2.8.
This structure is called a frame in PowerFactory . A frame and also a DSL model (like the
battery model showed in Figure 2.3) are only the definition (∗ .BlkDef), like a type of a line or
a transformer. The entity of a frame is a composite model (∗ .ElmComp). The entity of a DSL
model is a common model (∗ .ElmDsl).
Battery Energy Storing Systems (BESS)
9
Ta
2
BESS Simulation Model
fgrid
Pref
Frequ.
Controller
Pmeas
PQ
Controller
Umeas
Table of Contents
idref
fgrid
iqref
Pref
Frequ.
Controller
SOC
Charge
Controller
Pmeas
Umeas
PQ
Controller
Id-limref
idref
Iq-limref
Bat-Model
UDC
iqref
IDC
SOC
Charge
Controller
Id-limref
Iq-limref
Bat-Model
UDC
IDC
Figure
Figure 7: Structure
of 2.7:
theStructure
BESS of the BESS
Figure 7: Structure of the BESS
AC-Voltage
StaVmea
PQ-Measurement
*
PQ-Measurement
*
u
p
AC-Voltage
StaVmea
u
p
Frquency Measurement
ElmPhi*
fmeas
0
fmeas
Frquency Measurement
1
ElmPhi*
Frequency Control
ElmDsl*
dpref
dv ref
id_ref1;iqref1
PQ-Control
ElmDsl*
0
id_ref;iq_ref
0
0
2
1
3
id_ref1;iqref1
4
Frequency Control
0
ElmDsl*
Battery Model 1
ElmComp,ElmDSL
2
dpref
Ucell
dv ref
SOC
Icell
PWM-Converter
ElmVsc*
Charge Control
PQ-Control
ElmDSL*
ElmDsl*
0
0
21
3
2
4
1
3
Charge Control
ElmDSL*
deltai
0
Ucell
1
∗
Figure 2.8: Frame for the BESS-Controller
SOC
Battery Model( .BlkDef)
1
2
ElmComp,ElmDSL
Icell
The frequency controller is a simple proportional controller with a small dead band. In a real power system3 it is
The frequency controller is a simple proportional controller with a 2small dead band. In
a real
Figure 8: Frame for the BESS-Controller (*.BlkDef)
important, that there is only one integrator that controls the frequency. Otherwise there could be problems with
oscillations. The model of the frequency controller is showed below. The droop defines how much active power is
deltai
Battery
Systems
(BESS)
10
activatedEnergy
in a caseStoring
of a frequency
deviation.
Granted that K = 0.04 then the full active power of
the BESS is
activated if the frequency deviation is equal or greater than 2 Hz (in a 50 Hz system). All values are per unit
values. The droop should be coordinated to fulfil grid code requirements in a certain application case.
Application Manual: Simulation of a BESS with PowerFactory
9
1
id_r
2
BESS Simulation Model
power system it is important, that there is only one integrator that controls the frequency. Otherwise there could be problems with oscillations. The model of the frequency controller is showed
below. The droop defines how much active power is activated in a case of a frequency deviation. Granted that K = 0.04 then the full active power of the BESS is activated if the frequency
deviation is equal or greater than 2 Hz (in a 50 Hz system). All valuesT are
The
a b l eper
o f unit
C o n tvalues.
ents
droop should be coordinated to fulfil grid code requirements in a certain application case.
The command variable is f0, during the initialisation process this value will be fixed to frq (norble of C
n t sused to
mally 1) with the command inc(f0) = frq. The block ”offset” with theT aoutput
”po n0”t e is
The command variable is f0, during the initialisation process this value will be fixed to frq (normally 1) with the
compensate
”dpref” if that value is not equal to zero after the load flow (because ”p order frequ”
= frq. The block “offset” with the output “p_0” is used to compensate “dpref” if that value is not
iscommand
always inc(f0)
zero after
the initialisation).
equal to zero after the load flow (because “p_order_frequ” is always zero after the initialisation).
p_0
The command variable is f0, during the initialisation process this value will be fixed to frq (normally 1) with the
command inc(f0) = frq. The block “offset” with the output “p_0” is used to compensate
offset “dpref” if that value is not
f0
0
equal
to zero after the load flow (because “p_order_frequ” is always zero after the initialisation).
1
frq
1
df
-
fdead
Dband(K)
db
p_order_frequ
1/K
droop
dpref
offset
-1
frq
1
df
-
fdead
Dband(K)
db
p_0
f0
0
1
p_order_frequ
1/K
droop
Figure 9: Model of the Frequency Controller (*.BlkDef)
dpref
Figure 2.9: Model of the Frequency-1Controller (∗ .BlkDef)
The controller for the active and reactive power is a little bit more complex. It is showed in Figure 10. The control
deviation is filtered with a PT1 element. After that the signals are used as a input to a PI-controller. In the active
Figure
9: Model
ofthe
theactive
Frequency
Controller
(*.BlkDef)
The
and
reactive
power
is a that
little“delta_i”
bit more
complex.
It charge
is showed
in Figure
pathcontroller
is the
signalfor
“delta_i”
added.
In Figure
8 could
be seen,
comes
from the
controller.
The
2.10.
control
deviation
isslow
filtered
with aforPT1
element.
After
that with
the asignals
areforused as
voltageThe
(or Q)
controller
has a very
I-controller
set point
tracing and
a slope
dead band
controller
for thesupport.
active andInreactive
power path
is a little
complex.
It isi” showed
10. The
aThe
input
to avoltage
PI-controller.
the active
is bit
themore
signal
”delta
added.in Figure
In Figure
2.8control
could
proportional
deviation
filtered
with i”
a PT1
element.
After
the signals
are used as
a input
to a PI-controller.
In the active
be
seen, isthat
”delta
comes
from
thethat
charge
controller.
The
voltage
(or Q) controller
has a
deltai
path
is the I-controller
signal “delta_i”
In Figure
8 could
be a
seen,
thatwith
“delta_i”
comes
fromfor
the proportional
charge controller.
The
0
id_max
very
slow
foradded.
set point
tracing
and
slope
a dead
band
voltage
voltage
(or
Q)
controller
has
a
very
slow
I-controller
for
set
point
tracing
and
a
slope
with
a
dead
band
for
support.
pin
dp (1/(1+sT))
yi1
yi2
id_ref
{K+1/sT)}
- voltage
1
0
proportional
support.
Tr
Kp,Tip
2
0
1
2
dpref
pin
deltai
-
dp
(1/(1+sT))
Tr
id_min
yi1
yi2
dpref
id_max
id_ref
{K+1/sT)}
Kp,Tip
0
id_min
iq_max
3
4
vin
- dv
(1/(1+sT))
Trq
yi
(1/(1+sT))
Trq
yi
o11
Deadband_Offset_Lim
AC_deadband,Kq
iq_max
iq_ref
1
vref
vin
- dv
o1
4
vref
iq_min
iq_max
Deadband_Offset_Lim
AC_deadband,Kq
{1/sT}
Tiq
iq_min
Figure 10: Model of the PQ-Controller (*.BlkDef)
iq_min
o11
iq_ref
1
o1
3
iq_max
{1/sT}
Tiq
iq_min
The charge controller consists of two parts (Figure 11). One charging logic to achieve the already described
boundary conditions. And one block that limits the absolute value of the current
order according to (1.7). The
Figure
2.10: Model
of the PQ-Controller (∗ .BlkDef)
Figure
10: Model
of the
PQ-Controller
(*.BlkDef)
active current
(d-axis)
has always
the higher
priority than the reactive current (q-axis).
The
charge
controller
consists ofneeded.
two parts
11).current
One charging
logic to the
achieve
the already
described
There
are only
four parameters
The(Figure
charging
(ChargingCur),
minimal
SOC (minSOC),
the
The
charge
consists
of limits
two
parts
(Figure
2.11).
One
logic
achieve
boundary
conditions.
And one
block
that
the absolute
value
of the current
order “deltai”
according
toto(1.7).
The ofthe
maximum
SOCcontroller
(maxSOC)
and
the maximal
absolute
current
(maxAbsCur).
The charging
signal
is the
difference
active current (d-axis) has always the higher priority than the reactive current (q-axis).
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
10
11
There are only four parameters needed. The charging current (ChargingCur), the minimal SOC (minSOC), the
maximum SOC (maxSOC) and the maximal absolute current (maxAbsCur). The signal “deltai” is the difference of
Application Manual: Simulation of a BESS with PowerFactory
10
2
BESS Simulation Model
already described boundary conditions and one block that limits the absolute value of the current
order according to (7). The active current (d-axis) has always the higher priority than the reactive
current (q-axis).
Table of Contents
There are only four parameters needed. The charging current (ChargingCur), the minimal SOC
(minSOC), the maximum SOC (maxSOC) and the maximal absolute current (maxAbsCur). The
signal ”deltai” is the difference of the reference d-current from the PQ-controller and the modified
the reference
d-current
from the PQ-controller
the modified
d-current
from
logic. Theprevents
feedback a
d-current
from
the charging
logic. The and
feedback
of that
signal
to the
thecharging
PQ-controller
of
that
signal
to
the
PQ-controller
prevents
a
windup
of
the
PI-controller.
windup of the PI-controller.
deltai
-
0
maxAbsCur
id_ref_in
0
0
ChargeCtrl
ChargeCur,minSOC,maxSOC
SOC
1
idin
0
0
id_ref_out
1
1
Current Limiter
iq_ref_in
2
1
1
iq_ref_out
2
Figure 11: Model of the Charge Controller (*.BlkDef)
Figure 2.11: Model of the Charge Controller (∗ .BlkDef)
To get a working model of the controller in PowerFactory it is important to use the right names for the signals in
the frame definition. Only signals with the same names in the frame and in the model, inserted in the frame are
To
get a working
model
the controller
in PowerFactory
it is important
to use
thestep
right
connected.
Furthermore
it is of
important
to understand
how the initialisation
process works.
The first
of names
a
for
the
signals
in
the
frame
definition.
Only
signals
with
the
same
names
in
the
frame
and
in the
simulation is the initialisation. PowerFactory uses for that a load flow. If the load flow converges the results are
model,
inserted
in
the
frame
are
connected.
Furthermore
it
is
important
to
understand
how
the
used inside the DSL models to set all integrator outputs. A starting point of a simulation should always be a
initialisation
process
works.
The
first
step
of
a
simulation
is
the
initialisation.
PowerFactory
uses
balanced state. So all derivatives have to be zero, i.e. all inputs of integrators have to be zero too. The inputs,
for
that from
a load
If the
loadareflow
converges
the results
are used(Figure
inside
known
the flow.
load flow
results
in the
composite model
of the controller
8):the DSL models to set
all integrator outputs. A starting point of a simulation should always be a balanced state. So all
derivatives
have to be
zero,
i.e. all
inputs
of integrators
have
bePWM-converter
zero too. The inputs, known
- id_ref/iq_ref
– (the
currents
in the
dq-frame
in p.u.) known
fromtothe
from the load flow results are in the composite model of the controller (Figure 2.8):
-
fmeas – (the frequency in p.u.) known from a PLL measurement device
• id ref/iq ref - (the currents in the dq-frame in p.u.) known from the PWM-converter
-
u – (the absolute AC-voltage in p.u.) known from a voltage measurement device
• fmeas - (the frequency in p.u.) known from a PLL measurement device
-
p – (the active power in p.u.) known from a power measurement device
• u - (the absolute AC-voltage in p.u.) known from a voltage measurement device
The• slot
Model”power
is filledinwith
the known
composite
model
of the battery
(Figure 4). device
From there is after the
p -“Battery
(the active
p.u.)
from
a power
measurement
initialisation load flow also the current known.
The
”Battery
Model”
filled
with
model and
of the
battery
(Figure
2.4).
From
Afterslot
designing
the frames
andisthe
models
(i.e.the
the composite
types) the composite
common
models
could be
created.
there
is
after
the
initialisation
load
flow
also
the
current
known.
There are two composite models, one for the battery (Figure 12) and one for the BESS controller (Figure 13). The
slots are filled with the appropriate entities of the DSL models. The measurement devices have to be created and
After
designing the frames and the models (i.e. the types) the composite and common models
connected properly. A voltage measurement device has to be connected only to the proper bus. But for a current
could
be created. There are two composite models, one for the battery (Figure 2.12) and one
or a power measurement device it is also important to select the proper cubicle on the bus. Otherwise the prefix
for
the
BESS controller
The
slots
are strategy.
filled with the appropriate entities of the
of the measured
signal could(Figure
be wrong2.13).
and so the
whole
control
DSL
models.
The
measurement
devices
have
to
be
created
A p p l i c a t i o n M a n u a l : S i m u l a t i o n o f a B E S S w i t h P o w e r F a c t o r yand connected properly. A voltage
11
Battery Energy Storing Systems (BESS)
12
2
BESS Simulation Model
measurement device has to be connected only to the proper bus. But for a current or a power
measurement device it is also important to select the proper cubicle on the bus. Otherwise the
prefix of the measured signal could be wrong and so the whole control strategy.
Figure 2.12: Composite Model of the Battery (∗ .ElmComp)
Figure 2.13: Composite Model of the BESS Controller (∗ .ElmComp)
Battery Energy Storing Systems (BESS)
13
Tabl
2
BESS Simulation Model
Bus 4
PWM Converter
DC-Terminal
V
Battery
Figure 14:
2.14:The
TheBESS
BESSin
in the
the Single
Line
Diagram
Figure
Single
Line
Diagram
The model
the BESSonly
is now
complete; only
the configuration of th
The model for the BESS
is nowfor
complete;
the parameters
and the
the parameters
configurationand
of the
elements in the single
line
diagram
are
missing.
All
elements
in
the
single
line
diagram
have
line diagram are missing. All elements in the single line diagram have different tabs for th
different tabs for theflow
basicetc.
data,
flow etc.source
For theonly
DC-voltage
onlytothe
Forthe
theload
DC-voltage
the Basicsource
Data has
beBasic
configured. Only the va
Data has to be configured. Only the value of the nominal voltage (Unom) is of interest. In the
voltage
of the
interest.
the showcase
the value
0.8equation
kV. The data for the batter
showcase is the value
0.8 kV.(Unom)
The dataisfor
batteryInmodel
should be is
chosen
so that
chosen so
that Otherwise
equation (1.6)
is fulfilled
for all
charging
Otherwise
the PWM conve
(6) is fulfilled for all charging
states.
the PWM
converter
saturates
andstates.
the control
of
the whole BESS will control
not workofproperly.
the whole BESS will not work properly.
The PWM-converter has also to be configured. On the basic data tab the AC- and DC-voltage
The
has also
On data
the basic
(Unom/Undomdc) and
thePWM-converter
rated power (Snom)
havetotobebeconfigured.
inserted. The
on thedata
loadtab
flowthe AC- and DC-volta
page is important for and
the initialisation
load flow.
One have
control
should
bedata
P = 0on
asthe
already
the rated power
(Snom)
tocondition
be inserted.
The
load flow page is impor
mentioned (this is the condition for the d-axis). The other condition could be a certain value for
load flow. One control condition should be P = 0 as already mentioned (this is the conditio
the reactive power or an AC-voltage on a selected node (q-axis). In case of the PWM-converter
other condition
be a certain
the reactive
power
or an AC-voltage on a sele
the data on the RMS-Simulation
tabcould
is important
too. value
There for
should
be the ”Use
Integrated
Current Controller” activated.
ThePWM-converter
gain is 1 for both
axis;
theonintegrator
time constants
case of the
the
data
the RMS-Simulation
tabare
is both
important too. There sh
1 ms, a very fast inner
control
loop
for
the
current.
Integrated Current Controller” activated. The gain is 1 for both axis; the integrator time co
a very
fast inner
loop for
the current.
The parameters of the
frequency,
PQcontrol
and charge
controller
depends of the requirements of
the application case. The battery parameters depend on the selected battery and on the used
model for that battery.
The parameters of the frequency-, PQ- and charge controller depends of the requirement
case.the
The
battery parameters
the selected during
batteryoperation.
and on the used model for t
It is important to consider
limitations
of the batterydepend
and theon
PWM-converter
For that the single controllers are equipped with limiters. For realistic simulation results these
limits should be set right. Some batteries could be discharged with a higher current than they
It is important to consider the limitations of the battery and the PWM-converter during op
could be charged. For that case the PQ-controller needs other limits for the positive d-current
controllers are equipped with limiters. For realistic simulation results these limits sh
than for the negativesingle
d-current.
batteries could be discharged with a higher current than they could be charged. For that c
In some cases it may be also high active negative control power needed. In that case a copper
needs other limits for the positive d-current than for the negative d-current.
inside the DC circuit could consume that power. But normally a BESS is needed to prevent a
frequency under-run. Then a copper is not needed.
2.4
In some cases it may be also high active negative control power needed. In that case a co
circuit could consume that power. But normally a BESS is needed to prevent a frequency u
Testing the BESS
copper is not needed.
Study Case: Testing Case
Battery Energy Storing Systems (BESS)
14
1.4 Testing the BESS
3
Network Model
Study Case:
Testing Case
Before
used
in in
a bigger
simulation
grid
it should
be be
tested
in ainsmall
testing
Beforethe
themodel
modelcould
couldbebe
used
a bigger
simulation
grid
it should
tested
a small
testing environment.
environment. That testing grid should be simple so that the right functionality of the BESS could
That testing grid should be simple so that the right functionality of the BESS could be verified. The grid consists
be verified. The grid consists of three loads, one synchronous machine and one BESS. ”Load
three
loads,active
one synchronous
and one
BESS.
“Load
1” with
110MW
and 10MVar reactive powe
1”ofwith
110MW
and 10MVar machine
reactive power
and
”Load
2” with
30MW
active active
and 10MVar
and “Load
2” are
withconnected
30MW active
and
10MVarAfter
reactive
power are
to the (root
terminal.
reactive
power
to the
terminal.
initialisation
of aconnected
RMS simulation
meanAfter initialisation of a
square
based values)
synchronous
machine
supplies
140MW active
powersupplies
to the grid.
The active power to the
RMS simulation
(rootthe
mean
square based
values)
the synchronous
machine
140MW
BESS
supplies
no
active
power.
After
120
s
the
load
”Load
Step”
is
connected
to
the
grid.
grid. The BESS supplies no active power. After 120 s the load “Load Step” is connected to the grid. This is equal
This is equal to a power plant outage with 25MW active power. Hence the turbine governor
to a power plant outage with 25MW active power. Hence the turbine governor is configures as very slow the
is configured as very slow the BESS supplies the missing power. After 540 s the ”Load 2” is
BESS supplies
the missing
After
540could
s thebe“Load
2” ispower
reduced
zero
a slope
within 60 s, this could
reduced
to zero with
a slope power.
within 60
s, this
another
planttothat
is with
activated.
The
be another
power plant
BESS
starts loading
after that
that. is activated. The BESS starts loading after that.
The first step of a dynamical simulation is the initialisation in PowerFactory . For that the ”CalcuTheInitial
first Conditions”
step of a dynamical
initialisation
PowerFactory.
For in
that
‘Calculate Initial
) is used.isIfthe
all elements
areininitialized
(no errors
thethe
output
late
button ( simulation
window)
thenbutton
the simulation
started
with are
the ”Start
Simulation”
button
( output
). The window)
simu- then the
used. be
If all
elements
initialized
(no errors
in the
Conditions’
( ) is could
lation results could then be found in the virtual instrument panel named ”Testresults” in the lower
simulation could be started with the ‘Start Simulation’ button (
). The simulation results could then be found in
left area of the PowerFactory window.
Bus 3
Load 1
the ‘virtual instrument panel’ named “Testresults” in the lower left area of the PowerFactory window.
G
~
Load 2
G3 ..
Coal-Fired Power Plant
T3
Load Step
T4
DC-Terminal
Terminal
Bus 4
PWM Converter
V
Battery
Figure 2.15: Small Testing Grid for the BESS
Figure 15: Small Testing Grid for the BESS
3
Network Model
The investigated network consists of three power plants; one coal-fired power plant, one fast gas
turbine and one medium fast hydropower plant (Figure 3.1). The three plants are connected on
the 230 kV level via a closed ring with overhead lines. The loads are aggregated to three loads
A p p lA
i cto
a tC),
i o nalso
M a on
n u athe
l : 230
S i m kV
u l alevel.
tion of a BESS with PowerFactory
(Load
Battery Energy Storing Systems (BESS)
15
1
2 Network Model
investigated
network consists of three power plants; one coal-fired power plant, one fast gas turbine and one
3The
Network
Model
medium fast hydropower plant (Figure 16). The three plants are connected on the 230 kV level via a closed ring
with overhead lines. The loads are aggregated to three loads (Load A to C), also on the 230 kV level.
With PowerFactory it is easy to get a full report of all installed active/reactive power, the inWith PowerFactory
it is
easy
to get areserve
full report
allmodel
installed
active/reactive
power,
the installed-¿
capacity
stalled
capacity and
the
spinning
in of
the
(Output
Calculation
Analysis
Grid and
Summary).
-> Grid Summary).
the spinning reserve in the model (Output Calculation Analysis
The maximum load is assumed to 345 MW, for that all three power plants are needed. The
The maximum load is assumed to 345 MW, for that all three power plants are needed. The minimum load case is
minimum load case is 2/3 of the maximum load. During the low load period the power of the gas
2/3 of the maximum load. During the low load period the power of the gas turbine is reduced, because the gas
turbine is reduced, because the gas turbine is normally the most expensive plant. For different
turbine is normally the most expensive plant. For different load scenarios Operation Scenarios are used in
load
scenarios Operation Scenarios are used in PowerFactory .
Load C
PowerFactory.
Coal-Fired Pow er Plant
Line 4
Bus 3
G
~
T3
Line 2
Bus 8
~
G
T2
Line 5
Bus 7
Bus 2
Gas Turbine
Line 6
Bus 6
Line 1
Bus 5
Bus 9
G2 (gas)
G3 (coal)
Line 3
Load A
Load B
Big Industry
T1
Bus 10
Bus 1
Hydropow er Plant
G
~
G 1 (hydro)
Figure 3.1: Single Line Diagram
Figure 16: Single Line Diagram
For a steady state load flow analysis ( ) are no further dynamic models of the power plants
For a steady state load flow analysis (
) are no further dynamic models of the power plants needed. Only the
needed. Only the generator types of the power plants and the information on the load flow page
generator types of the power plants and the information on the load flow page has to be configured. In that
has
to be configured. In that information is also the capability limit curve for reactive power
informationIt isisalso
the capability
limitone
curve
for reactive
power included.
It is important
to have from
one reference
included.
important
to have
reference
machine
in the grid.
The generator
the
machine
in
the
grid.
The
generator
from
the
hydropower
plant
is
the
reference
in
the
sample
grid.
Theas
other
hydropower plant is the reference in the sample grid. The other generators are configured
generators
are
configured
as
PV-nodes,
they
control
their
active
power
output
and
the
local
voltage.
PV-nodes, they control their active power output and the local voltage.
If the load flow is calculated with the option ”Active Power Control according Secondary ConA p pthen
l i c a titi ois
n possible
M a n u a l : to
S i configure
m u l a t i o n the
o f aparticipation
B E S S w i t h of
P othe
w e r plant
F a c t oon
r y the compensation of a load
trol”
change with the variable ”Primary Frequency Bias” (Kpf). An outage of a generator is for example a very big load change in the network. With the configuration of Kpf is it possible to define a
maximum frequency deviation. If an outage of the gas turbine (60 MW) should be compensated
from the coal power plant and hydropower plant within a frequency deviation of 1,5 Hz, then the
Kpf-factor has to be 20 MW/Hz (=60 MW / 2 / 1,5 Hz).
The transformers have automatic tap changers to control the voltage on the high voltage side.
To make sure, that the tap changers work automatically and that the generators are inside their
reactive power limits the options ”Automatic Tap Adjust of Transformers” and ”Consider Reactive
Battery Energy Storing Systems (BESS)
16
15
3
Network Model
Power Limits” have to be activated in the load flow calculation dialogue.
It is important, that the original grid is configured right. Otherwise it is later together with the
BESS more complicate to find errors or problems. So the first step should be a Data Verification
( ). If there are no errors or warnings, then as a next step a load flow with the original setup
is recommended. If the option ”Show Verification Report” on the ”Output” tab of the load flow
command is checked, then there are only overloaded (more than 80% loading) elements printed
in the output window. It is also important, that there are no warnings in the output window after
the load flow.
For a planned expansion of the grid, like in this case with a BESS it is recommended to use
the variations in PowerFactory . So the original grid could be easily restored and fast switching
between different expansion stages is possible.
To simulate different cases (generator outage, short circuits etc.) in the time domain, different
study cases are used. So each case could be treated separately with a different set of simulation
events, result plots, active operation scenarios and variations. It is generally recommended
to work with study cases, operation scenarios and variations. Operation scenarios are used
to simulate different operating points with the same grid setup. So the original setup is not
changed since all parameters are stored in the appropriate scenario. To manage changes in
the grid setup are variations used. With variations could be different expansion stages of the
original grid managed without a change on the original grid. In PowerFactory the variations are
connected to a certain (user defined) date and time. Each study case has its own time also
set by the user. With the study case time could be different expansion stages of one variation
handled.
Up to that point only a static load flow was considered. For a RMS-simulation in the time domain
are however further detailed models of the power plants needed. The models are implemented
in DSL (DIgSILENT Simulation Language). For the different power plants are pre defined and
standardized models used. The average voltage controller (vcolIEEET1), the turbine governor
(pcuIEEG1) and the synchronous machine (G3) are connected in a composite model (Figure
3.2). A power system stabilizer (PSS) is not used in this case; therefore the pss-slot is empty.
Figure 3.2: Composite Model - Power Plant Control (∗ .ElmComp)
Battery Energy Storing Systems (BESS)
17
4
Application Case 1: Frequency Regulation
The turbine governor controls the speed of the turbine and so, via the synchronous machine the
electric frequency. In case of a fast load change, for example the outage of a power plant, the
frequency rapidly drops due to the lack of active power in the grid. To prevent a slowdown of the
whole system the turbine governor has to activate more power. This is called primary frequency
control or also spinning reserve, activation has to be instantaneous. This means in reality that
a coal-fired power plant has all the time a loss of energy due to the permanent choking on the
turbine valve. So it would be more economic if another device could deliver the primary control
energy until the coal power plant has increased the active power. This is called secondary
frequency control; activation has to occur within 15 minutes after the frequency deviation. To fill
that gap a battery energy storing system (BESS) could be a solution.
4
Application Case 1: Frequency Regulation
Application case 1 consists of two parts. The first part is a simulated load change for that are two
study cases used in the PowerFactory project; one with and one without a BESS. The second
part is a simulated generator outage of the fast gas turbine. For that are also two study cases
used.
4.1
Replacement of Primary Control Energy (Load Change)
Study Case: Industry Load without BESS; Industry Load with BESS
Primary control energy is needed in a grid to control the frequency within a very small gap
between an upper and a lower frequency limit. In the UCTE-grid this margin is only 200 mHz in
the positive and negative direction. The worst expected case in the UCTE is the double outage
of a nuclear power plant. This would lead to an active power gap of 3 GW. The 3 GW have to
be activated within 30 seconds and the power has to be continued for at least 15 minutes. But
there are a lot of power plants who do that primary control, so the control power of each plant
is not so big. The demand from the UCTE is that each grid operator has to deliver 2% of his
actual produced active power as primary control power. This primary control power could also
come from a BESS.
If a BESS is used for primary control, then it should be known how much active power is needed.
With the known active power for the worst case and the time (as mentioned 15 min in the UCTE)
is it possible to calculate the needed capacity of the battery. Normally one single battery cell has
a DC-voltage between 1.2 and 3.4 V dependent on the battery technology. The capacity per cell
varies from a few mAh up to several 100 Ah. So a battery of a BESS is always a combination
of parallel and serial connected single cells. The more batteries are connected in parallel, the
higher is the total capacity, the total inner resistance will be lower. The current per cell will also
be lower. But there are also serial connected cells needed to get a higher total DC-voltage. With
the DC-voltage is also the internal resistance increased.
As described in (6) the DC-voltage shouldn’t under-run a certain level. So there should be
enough cells in series to ensure this. The AC-voltage level depends on the case and so does
the DC-voltage level.
If the BESS is used for primary control, then the battery technology should support constant
loading/unloading cycles without a (fast) degeneration in terms of a so called memory effect.
The control power is activated if the frequency deviation is more than 10 mHz or 0.0002 pu in
a 50 Hz system. So the dead band showed in Figure 2.9 has to be very small. The variable
”droop” has to be 0.004, i.e. activation of the full active power (of the PWM converter) within
200 mHz frequency deviation.
Battery Energy Storing Systems (BESS)
18
4
Application Case 1: Frequency Regulation
For the following investigation is the already described grid used. The PWM-converter has a
rated power of 30 MVA. This corresponds with the already mentioned frequency control bias to
a frequency bias of 30 MW/0.2 Hz =150 MW/Hz. To test the BESS a sudden load change of 30
MW active power is simulated (simple connection of a additional load).
During the simulation without the BESS (study case: ”Industry load without BESS”) all governor
controllers are tuned with standard values. It is obvious, that a load change of nearly 10% of
the total grid load causes a big frequency under-run (red curves in Figure 4.2 and Figure 4.3).
The gas turbine is important for the grid because it could increase the active power output much
faster than the hydropower plant or the coal power plant. A under frequency of nearly 49 Hz
would lead in the UCTE grid to severe action.
In the second simulation (study case: ”Industry load with BESS”) the BESS replaces the primary
control power of the coal-fired power plant. The turbine governor control of the coal-fired power
plant is modified for that. The controller gain is reduced from the standard value (K = 25) to K
= 1. The participation of G3 on the primary control is now reduced to nearly zero. With the fast
BESS the frequency under-run is stopped and stabilized within a range of 200 mHz. 7 Minutes
after the load step the active power of the coal-fired power plant is increased due to a dispatch
command. The power is ramped up from 148 MW to 170 MW in five minutes. This equates
to a gradient of only 2.6%/min. With the BESS all power plants are unburdened from fast load
changes.
The dispatch command is set via a parameter event in PowerFactory . To obtain a slope with
a certain gradient and no step the model of the governor was expanded with a gradient limiter
block (Figure 4.1).
With PowerFactory is it possible to display results from different simulations within one plot. For
that are different result files used. In Figure 4.2 and Figure 4.3 the results are from two different
study cases. But it is also possible to use several result files within one study
T a b lcase.
e o f CThe
ontents
advantage of one study case/variation per result file is that the results and the used parameters
for the simulation match together.
0.0005
dispatc..
Gradient Limi..
1
o113
0
-0.0005
ptHP
pturbhp
0.0005
cosnhp
0
Pmin
1/(1+sT)
T4
1/(1+sT)
T5
x1
x2
x3
K
K7
K
K5
1/(1+sT)
-0.0005 T6
x5
x4
psetphp
1
1/(1+sT)
T7
o113
Uc
Pmax
{1/s}
K
K8
Limit..
o112
x0
-
1/K
T3
K
K6
wref
-
K
K2
3
(1+sTb)/(1+sTa)
T1,T2
o18
-
K
K
K
K4
dw
Gradient Limiter
1
o14
o114
w
K
K3
K
K1
dispatch
0
Uo
2
pt
1
psetphp
1
0
Pt/Pturb
pturblp
4
5
0
ptlp
1
Pt/Pturb x L1
cosnlp
1
cosn
cosnlp
Figure 18:
Edited
Governor
Controller
for Dispatch
Command
(via event)
Figure
4.1:
Edited Governor
Controller
for Dispatch
Command
(via event)
Battery Energy Storing Systems (BESS)
19
Table of Contents
Application Case 1: Frequency Regulation
DIgSILENT
4
130,00
125,00
120,00
115,00
110,00
105,00
100,00
60,00
70,00
80,00
G1 (hydro): Active Pow er in MW - w ithout BESS
G1 (hydro): Active Pow er in MW - w ith BESS
90,00
[s]
100,00
60,00
70,00
80,00
G2 (gas): Active Pow er in MW - w ithout BESS
G2 (gas): Active Pow er in MW - w ith BESS
90,00
[s]
100,00
60,00
70,00
80,00
G3 (coal): Active Pow er in MW - w ithout BESS
G3 (coal): Active Pow er in MW - w ith BESS
90,00
[s]
100,00
60,00
70,00
G1 (hydro): Speed in p.u. - w ithout BESS
G1 (hydro): Speed in p.u. - w ith BESS
90,00
[s]
100,00
81,02
77,24
73,45
69,67
65,88
62,09
170,00
165,00
160,00
155,00
150,00
145,00
1,001
0,998
0,995
0,992
0,989
0,987
80,00
Figure 4.2: Simulation Results of a 30 MW Load Step (detail)
Figure 19: Simulation Results of a 30 MW Load Step (detail)
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
20
20
Table of Contents
Application Case 1: Frequency Regulation
DIgSILENT
4
130,00
125,00
120,00
115,00
110,00
105,00
100,00
0,000
3,000
6,000
G1 (hydro): Active Pow er in MW - w ithout BESS
G1 (hydro): Active Pow er in MW - w ith BESS
9,000
12,00
[min]
15,00
3,000
6,000
G2 (gas): Active Pow er in MW - w ithout BESS
G2 (gas): Active Pow er in MW - w ith BESS
9,000
12,00
[min]
15,00
3,000
6,000
G3 (coal): Active Pow er in MW - w ithout BESS
G3 (coal): Active Pow er in MW - w ith BESS
9,000
12,00
[min]
15,00
3,000
6,000
G1 (hydro): Speed in p.u. - w ithout BESS
G1 (hydro): Speed in p.u. - w ith BESS
9,000
12,00
[min]
15,00
81,02
77,24
73,45
69,67
65,88
62,09
0,000
180,00
170,00
160,00
150,00
140,00
0,000
1,001
0,998
0,995
0,992
0,989
0,987
0,000
Figure 4.3: Simulation Results of a 30 MW Load Step (full)
Figure 20: Simulation Results of a 30 MW Load Step (full)
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
21
21
4
Application Case 1: Frequency Regulation
4.2
Replacement of Primary Control Energy (Generator Outage)
Study Case: Gas Outage without BESS; Gas Outage with BESS
The worst case for a generator outage in the small showcase grid is the outage of the gas
turbine. The gas turbine is the fastest power plant in the grid. Without that fast controllable plant
would it be much harder to control the frequency after a disturbance. To study the outage with
more realistic results a low load scenario is assumed with only 80% of the original loads. For
that is an operation scenario used in PowerFactory . With an operation scenario is it possible
to change and store operational data for different cases, like a low load and a high load case
without the need for an additional variation.
The outage of the power plant with the gas turbine is simply simulated by opening the switch
on the HV-side of the main transformer. The following frequency under-run is without the BESS
more distinct than in the load change chase. This comes from the lack of a fast controllable
power plant (Picture x red curves).
Again the BESS is used to improve the behaviour of the grid performance and to replace the
primary control power of the coal-fired power plant. The BESS could control the active power
output much faster than a power plant because there are no mechanical inertia and delays.
Therefore the frequency deviation is smaller.
Battery Energy Storing Systems (BESS)
22
Table of Contents
Application Case 1: Frequency Regulation
DIgSILENT
4
124,6
116,6
108,6
100,7
92,68
84,71
60,00
70,00
80,00
G1 (hydro): Active Pow er in MW - w ithout BESS
G1 (hydro): Active Pow er in MW - w ith BESS
90,00
[s]
100,00
60,00
70,00
80,00
G3 (coal): Active Pow er in MW - w ithout BESS
G3 (coal): Active Pow er in MW - w ith BESS
90,00
[s]
100,00
60,00
70,00
G1 (hydro): Speed in p.u. - w ithout BESS
G1 (hydro): Speed in p.u. - w ith BESS
80,00
90,00
[s]
100,00
60,00
70,00
SimpleBattery: Ucell in p.u. (Basis: 10,00 )
SimpleBattery: SOC
80,00
90,00
[s]
100,00
170,00
160,00
150,00
140,00
130,00
120,00
1,005
0,994
0,983
0,973
0,962
0,951
1,378
1,247
1,115
0,984
0,853
0,721
Figure 4.4: Simulation Results of Gas Turbine Outage (detail)
Figure 21: Simulation Results of Gas Turbine Outage (detail)
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
23
23
Table of Contents
Application Case 1: Frequency Regulation
DIgSILENT
4
124,6
116,6
108,6
100,7
92,68
84,71
1,00
6,00
11,00
G1 (hydro): Active Pow er in MW - w ithout BESS
G1 (hydro): Active Pow er in MW - w ith BESS
16,00
21,00
[min]
26,00
1,00
6,00
11,00
G3 (coal): Active Pow er in MW - w ithout BESS
G3 (coal): Active Pow er in MW - w ith BESS
16,00
21,00
[min]
26,00
1,00
6,00
11,00
G1 (hydro): Speed in p.u. - w ithout BESS
G1 (hydro): Speed in p.u. - w ith BESS
16,00
21,00
[min]
26,00
1,00
6,00
11,00
SimpleBattery: Ucell in p.u. (Basis: 10,00 )
SimpleBattery: SOC
16,00
21,00
[min]
26,00
180,00
170,00
160,00
150,00
140,00
130,00
120,00
1,005
0,994
0,983
0,973
0,962
0,951
1,415
1,121
0,827
0,533
0,239
-0,055
Figure
4.5: Simulation
Results
of Gas
Figure 22: Simulation
Results
of Gas Turbine
Outage
(all)Turbine Outage (full)
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
24
24
Table of Contents
5
Application Case 2: FRT Simulation
Application
Case
2: FRT Simulation
5 4Application
Case 2:
FRT Simulation
Study
Case:
FRTFRT
without
BESS;
Study
Cases:
without
BESSFRT with BESS
FRT with BESS
Together with the different renewable energy sources, such as wind turbines and photovoltaic,
the ride through of voltage dips becomes more and more an important topic. So it is also
Together
different
renewable
energy
as wind
turbines (FTR)
and photovoltaic,
the ride through
important
towith
havethe
a BESS
model
that could
besources,
used insuch
a fault
ride through
study. Since
of
voltage
dips
becomes
more
and
more
an
important
topic.
So
it
is
also
important
to
have
a
BESS
the FRT is a very fast but also short action the model could be simplified in some parts. It is model that
could
be used
a fault
through
(FTR)
study. significantly
Since the FRTwithin
is a very
but also
short action
very
unlikely
thatinthe
SOCride
of the
battery
changes
onefast
or two
seconds.
Also the model
thecould
battery
assumed
asunlikely
constant
during
thatof
time.
The important
of
be DC-voltage
simplified in could
some be
parts.
It is very
that
the SOC
the battery
changesbranch
significantly
within one
theor
BESS
model isAlso
thenthe
thebattery
PV/PQand the current
To constant
obtain that
the whole
batterytwo seconds.
DC-voltage
could becontroller.
assumed as
during
that time.
The important
system
frame
is BESS
out ofmodel
service
in the
study
So the
SOC in To
theobtain
charge
controller
is battery-system
branch
of the
is then
theused
PV/PQandcases.
the current
controller.
that
the whole
fixed to a constant value (0.8 pu). The DC-voltage is also constant fixed to 1 pu. To improve the
frame is out of service in the used study cases. So the SOC in the charge controller is fixed to a constant value
behaviour of the BESS the charge controller is expanded with a fault modus. If the AC-voltage
(0.8 pu). The DC-voltage is also constant fixed to 1 pu. To improve the behaviour of the BESS the charge
deviates more than 0.1 pu from its nominal value the charge controller is switched to reactive
controller
is expanded with a fault modus. If the AC-voltage deviates more than 0.1 pu from its nominal value the
power
preference.
charge controller is switched to reactive power preference.
The example grid is supplemented by a 8 MW asynchronous motor. The BESS is to the motor
busThe
connected
that
simulation as by
shown
in Figure
5.2. During
a voltage
dipisantoasynchronous
examplefor
grid
is supplemented
a 8 MW
asynchronous
motor.
The BESS
the motor bus connected for
motor delivers reactive power to the grid. But after the voltage dip an asynchronous motor needs
that simulation as shown in Figure 24. The rated power of the PWM converter is reduced to 20MVA. During a
a lot of reactive power to re-magnetize the rotor, then during the re-magnetization the voltage
voltage dip an asynchronous motor delivers reactive power to the grid. But after the voltage dip an asynchronous
on the
motor bus is low. Using the BESS connected to the Motor Bus the voltage recovers faster
lotthe
of reactive
power topower
re-magnetize
duemotor
to theneeds
effecta of
BESS reactive
control. the rotor. During the re-magnetization the voltage on the
motor bus is low. But with the fast reactive power control of the BESS the voltage recovers very quickly.
deltai
-
0
maxAbsCur
id_ref_in
0
0
ChargeCtrl
ChargeCur,minSOC,maxSOC
1
SOC
idin
0
0
id_ref_out
1
1
Current Limiter
deltaU
2
3
iq_ref_in
uac
1
2
1
iq_ref_out
2
Figure
5.1:Controller
Charge Controller
with switchable
Current
Limiter
(ElmDsl)
Figure 23:
Charge
with switchable
Current
Limiter
(ElmDsl)
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
25
25
Table of Contents
Application Case 2: FRT Simulation
Bus 8
5
Bus 9
Line 5
Battery Energy Storage System
PWM Converter
Bus 4
DC-Terminal
Battery
T4
Load B
V
2-Winding Transformer
Line 6
Bus 6
T1
Motor Bus
M
~
Asynchronous Machine
Bus 1
Asynchonous Machine
Figure 24: Changed Grid Structure for FRT-Study
Figure 5.2: Changed Grid Structure for FRT-Study
In the results (Figure 5.3) is it obvious, that the recovery of the system with the BESS is faster
In the
the recovery
results (Figure
is it obvious,
recovery of the system with the BESS is faster than the recovery
than
of the25)
system
withoutthat
thethe
BESS.
of the system without the BESS.
Application Manual: Simulation of a BESS with PowerFactory
Battery Energy Storing Systems (BESS)
26
26
5
Application Case 2: FRT Simulation
Figure 5.3: Simulation Results of a Short Circuit on Bus 6
Battery Energy Storing Systems (BESS)
27
References
References
[1] Rechargable Batteries Applications Handbook. Technical report, Technical Marketing Staff
of Gates Energy Products Inc. Butterworth-Heinemann, 1992.
[2] S. Barsali and M. Ceraolo. Dynamical Models of Lead-Acid Batteries: Implementation Issues. IEEE Transactions on on Energy Conversion, 17(1), March 2002.
[3] M. Ceraolo. New Dynamical Models of Lead-Acid Batteries. IEEE Transactions on Power
Systems,, 15(4), November 2000.
[4] D. Kottick, M. Blau, and D. Edelstein. Battery Energy Storage for Frequency Regulation in
an Island Power System. IEEE Transactions on Energy Conversion,, 8(3), September 1993.
[5] N. K. Medora and A. Kusko. Dynamic Battery Modeling of Lead-Acid Batteries using Manufacturer’s Data. Twenty-Seventh International Telecommunications Conference, INTELEC
’05., 2005.
Battery Energy Storing Systems (BESS)
28