UNIVERSIDADE FEDERAL DE SANTA CATARINA
DEPARTAMENTO DE AUTOMAÇÃO E SISTEMAS
GUSTAVO ARTUR DE ANDRADE
Sinais e Sistemas Lineares
Florianópolis
2020
CONTEÚDO
3
Conteúdo
1 Revisão sobre números complexos
1.1 Introdução . . . . . . . . . . . .
1.2 Definição . . . . . . . . . . . . .
1.2.1 Exercícios . . . . . . . . .
1.3 Forma polar . . . . . . . . . . . .
1.3.1 Exercícios . . . . . . . . .
1.4 Funções complexas . . . . . . . .
1.4.1 Exercícios . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
. 5
. 5
. 7
. 8
. 9
. 9
. 10
2 Sinais e Sistemas Lineares
2.1 Sinais . . . . . . . . . . . . . . .
2.1.1 Tamanho do sinal . . . . .
2.1.2 Potência de um sinal . . .
2.1.3 Operações com sinais . .
2.1.4 Classificação de sinais . .
2.1.5 Alguns sinais importantes
2.2 Sistemas . . . . . . . . . . . . . .
2.2.1 Classificação de sistemas .
2.3 Exercícios . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
11
11
12
14
16
18
19
21
3 Análise de sistemas lineares no domínio do tempo
3.1 Sistemas lineares discretos e invariantes no tempo . . . . . . . .
3.1.1 Equações a diferenças lineares com coeficientes constantes
3.2 Sistemas lineares contínuos e invariantes no tempo . . . . . . . .
3.2.1 Equações diferenciais lineares com coeficientes constantes
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
23
23
36
36
4 Princípios básicos da transformada de Laplace
4.1 Transformada de Laplace . . . . . . . . . . . . . .
4.1.1 Exercícios . . . . . . . . . . . . . . . . . .
4.2 Ordem exponencial . . . . . . . . . . . . . . . . .
4.2.1 Exercícios . . . . . . . . . . . . . . . . . .
4.3 A classe L . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Exercícios . . . . . . . . . . . . . . . . . .
4.4 Propriedades básicas da transformada de Laplace
4.4.1 Exercícios . . . . . . . . . . . . . . . . . .
4.5 Inversa da transformada de Laplace . . . . . . . .
4.6 Teoremas da translação . . . . . . . . . . . . . .
4.6.1 Exercícios . . . . . . . . . . . . . . . . . .
4.7 Frações parciais . . . . . . . . . . . . . . . . . . .
4.7.1 Exercícios . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
45
45
45
46
46
46
47
47
48
48
49
50
51
52
5 Aplicações
5.1 A transformada de Laplace da derivada de um sinal
5.2 A transformada de Laplace da integral de um sinal
5.3 Equações diferenciais ordinárias . . . . . . . . . . .
5.3.1 Exercícios . . . . . . . . . . . . . . . . . . .
5.4 Valores assintóticos . . . . . . . . . . . . . . . . . .
5.4.1 Exercícios . . . . . . . . . . . . . . . . . . .
5.5 Convolução . . . . . . . . . . . . . . . . . . . . . .
5.5.1 Exercícios . . . . . . . . . . . . . . . . . . .
5.6 Funções de transferência . . . . . . . . . . . . . . .
5.6.1 Pólos e zeros . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
53
53
54
55
59
60
61
61
62
62
63
4
CONTEÚDO
5.7 Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.1 Estabilidade BIBO . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.2 Estabilidade interna . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8 Resposta temporal de sistemas descritos por função de transferência . . .
5.8.1 Sistemas descritos por funções de transferência de primeira ordem
5.8.2 Sistemas descritos por funções de transferência de segunda ordem
5.8.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
63
63
63
64
64
64
64
68
6 Resposta em frequência
6.1 Conceitos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Resposta em frequência de uma função de transferência de primeira ordem
6.3 Resposta em frequência para sistemas de segunda ordem . . . . . . . . . . .
6.4 Técnicas do traçado do gráfico de Bode . . . . . . . . . . . . . . . . . . . . .
6.4.1 Resumo das regras para o traçado do gráfico de Bode . . . . . . . . .
6.5 Exercícios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
71
71
72
72
73
75
76
7 Transformada Z
7.1 Existência da transformada Z . . . . . . . . . . . . . . . . .
7.1.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Propriedades da transformada Z . . . . . . . . . . . . . . . .
7.2.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Inversa da transformada Z . . . . . . . . . . . . . . . . . . .
7.3.1 Método da série de potência . . . . . . . . . . . . . .
7.3.2 Expensão em frações parciais . . . . . . . . . . . . .
7.3.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Relação entre a transformada de Laplace e a transformada Z
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
79
79
80
80
81
82
82
82
83
84
8 Aplicações
8.1 Equações a diferenças lineares com coeficientes contantes
8.1.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . .
8.2 Convolução . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 Função de transferência . . . . . . . . . . . . . . . . . . .
8.3.1 Pólos e zeros . . . . . . . . . . . . . . . . . . . . .
8.3.2 Exercícios . . . . . . . . . . . . . . . . . . . . . . .
8.4 Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4.1 Estabilidade BIBO . . . . . . . . . . . . . . . . . .
8.4.2 Estabilidade interna . . . . . . . . . . . . . . . . .
8.4.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
85
85
86
86
87
88
88
88
88
88
88
9 Resposta em frequência
9.1 Exponenciais complexas . . . . . . . . . . . . . . . . . . . .
9.2 Resposta em frequência . . . . . . . . . . . . . . . . . . . .
9.2.1 Sistemas de primeira e de segunda ordem . . . . . .
9.3 Resposta em frequência a partir da posição dos polos e zeros
9.3.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Aliasing e taxa de amostragem . . . . . . . . . . . . . . . .
9.4.1 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
9.5 Projeto de sistemas discretos . . . . . . . . . . . . . . . . . .
9.5.1 Discretização de controladores contínuos . . . . . .
9.5.2 Sistemas digitais equivalentes . . . . . . . . . . . . .
9.5.3 Exercícios . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
91
91
91
92
93
94
94
96
96
96
97
98
5
Capítulo 1
Revisão sobre números complexos
1.1
Introdução
Uma das principais razões de considerar números reais ao invés de números racionais é que certas equações que não
possuem solução no conjunto dos números racionais possuem solução no conjunto dos números reais. Por exemplo,
x2 = 2 é um destes casos. Entretanto, também conhecemos equações que não possuem solução no conjunto dos
números reais, como por exemplo x2 = −1, ou x2 = −2. Definimos um novo conjunto de números onde tais equações
possuem solução. Este tipo de número
é chamado de número complexo.
√
√
Números com a forma a + b −1, na qual a e b são números reais – chamamos os números a + b −1 de
números complexos – apareceram no inı́cio do século XVI. Cardan (1501-1576) trabalhou com números complexos
para resolver equações quadráticas e cúbicas. No século XVIII, funções envolvendo números complexos foram
encontradas por Euler para fornecerem soluções de equações diferenciais. Conforme as manipulações envolvendo
números complexos foram sendo introduzidas, tornou-se mais aparente que muitos problemas da teoria de funções
de variáveis reais poderiam ser facilmente resolvidas usando números complexos e funções de variáveis complexas.
Devido a sua pouca utilidade prática na época, os números complexos possuı́am reputação pobre e geralmente
não eram considerados números legı́timos até a metade do século XIX. Descartes, por exemplo, rejeitou as raı́zes
complexas de equações e criou o termo imaginário para estas soluções. Euler também considerava que números
complexos existiam somente na imaginação e considerava raı́zes complexas de uma equação útil apenas para mostrar
que a equação não possuı́a soluções.
A aceitação dos números complexos é devido a sua representação geométrica, desenvolvida e articulada por Gauss.
Ele descobriu que é errôneo assumir que existe um mistério sobre estes números. Na representação geométrica, ele
escreveu que “ o significado intuitivo dos números complexos é completamente estabelecido e não é mais necessário
considerar estes objetos no domı́nio da aritmética”.
1.2
Definição
Os números complexos são um conjunto de objetos, representado por C, que podem ser adicionados e multiplicados.
A soma e o produto de dois números complexos também é um número complexo e satisfaz as seguintes condições:
• Todo número real é um número complexo, e se α e β são números reais, então sua soma e produto como
números complexos são iguais à soma e produto dos números reais.
• Existe um número complexo denotado por j tal que j 2 = −1.
• Todo número complexo pode ser escrito de maneira única como a + bj, na qual a e b são números reais.
• Se α, β e γ são números complexos, então:
– (αβ)γ = α(βγ).
– (α + β) + γ = α + (β + γ).
– α(β + γ) = αβ + αγ e (β + γ)α = βα + γα.
– αβ = βα e α + β = β + α.
– Se 1 representa o número real um, então 1α = α.
– Se 0 é o número real zero, então 0α = 0.
– α + (−1)α = 0
6
Capı́tulo 1. Revisão sobre números complexos
Agora iremos analisar as consequências dessas propriedades.
Com cada número complexo a + bj, podemos associar o ponto (a, b) no plano, conforme apresentado na Figura
1.1. Sejam α = a1 + a2 j e β = b1 + b2 j dois números complexos. Então
α + β = (a1 + b1 ) + (a2 + b2 )j.
Portanto, a soma de números complexos é dada pela soma dos seus componentes.
a + bj = (a, b)
bj
1 + 1j = (1, 1)
1j
a
1
Figura 1.1: Representação dos números complexos no plano.
Exemplo 1.1. Considere α = 3 + 3j e β = −2 + 5j. Então,
α + β = (3 + 3j) + (−2 + 5j) = (3 − 2) + (3 + 5)j = 1 + 8j.
Na multiplicação de números complexos, usamos a propriedade j 2 = −1 para simplificar as expressões e deixá-las
na forma a + bj.
Exemplo 1.2. Sejam α = 2 + 3j e β = 1 − j. Então
αβ = (2 + 3j)(1 − j) = (2 − j) + 3j(1 − j) = 2 − 2j + 3j − 3j 2 = 2 = j − 3(−1) = 2 + 3 + j = 5 + j.
Seja α = a + bj um número complexo. Definimos α como a − bj. Assim, se α = 2 + 3j, então α = 2 − 3j. O
número complexo α é chamado de conjugado de α. Podemos perceber que
αα = a2 + b2 .
Através da Figura 1.1, podemos ver que αα é o quadrado da distância do ponto (a, b) da origem.
Agora iremos analisar duas propriedades importantes dos números complexos que nos permitirão realizar a
divisão de números complexos diferentes de 0.
Se α = a + bj é um número complexo diferente de zero, seja
λ=
a2
α
,
+ b2
então αλ = λα = 1. O número λ é chamado de inverso de α, e é denotado por α−1 , ou 1/α. Se α e β são números
complexos, geralmente escrevemos β/α ao invés de α−1 β.
Exemplo 1.3. Para encontrar o inverso de (1+j), percebemos que o conjugado de 1+j é 1−j e que (1+j)(1−j) = 2.
Logo,
(1 + j)−1 =
1−j
.
2
Teorema 1.1. Sejam α, β números complexos. Então
αβ = αβ,
α + β = α + β,
α = α.
Para demonstrar o Teorema 1.1 basta utilizar a representação a + bj dos números complexos, com a e b números
reais, e realizar as operações de soma e multiplicação para obter o resultado de igualdade. Esta tarefa é deixada
como exercı́cio.
Seja α = a + bj um número complexo, com a e b reais. Iremos chamar a de parte real de α, e denotaremos por
Re(α). Logo,
α + α = 2a = 2Re(α).
1.2 Definição
7
O número real b é chamado de parte imaginária de α e é denotador por Im(α).
Definimos o valor absoluto do número complexo α = a1 + a2 j como
q
|α| = a21 + a22 .
Se pensarmos em α como o ponto (a1 , a2 ) no plano, então |α| é o comprimento do seguimento de linha da origem
até α. Em termos de valor absoluto, podemos escrever
α−1 =
α
,
|α|2
se α 6= 0.
Teorema 1.2. O valor absoluto de um número complexo satisfaz as seguintes propriedades. Se α e β são números
complexos, então
|αβ| = |α||β|,
|α + β| ≤ |α| + |β|.
Demonstração. Temos que
|αβ|2 = αβαβ = ααββ = |α|2 |β|2 .
Tomando a raiz quadrada em ambos os lados da igualdade acima, concluı́mos que |α||β| = |αβ|, provando a primeira
afirmação.
Para a segunda afirmação, temos que
|α + β|2 = (α + β)(α + β) = (α + β)(α + β) = αα + βα + αβ + ββ
= |α|2 + 2Re(βα) + |β|2 .
Por outro lado, note que
2Re(βα) ≤ 2|βα|,
pois a parte real de um número complexo é sempre menor ou igual ao seu valor absoluto. Portanto,
|α + β|2 ≤ |α|2 + 2|βα| + |β|2 ≤ |α|2 + 2|β||α| + |β|2 = (|α| + |β|)2 .
Tomando a raiz quadrada em ambos os lados obtemos o resultado do teorema.
1.2.1
Exercı́cios
1. Expresse os seguintes números complexos na forma a + bj, com a e b números reais
a) (−1 + 3j)−1
b) (1 + j)(1 − j)
c) (1 + j)j(2 − j)
d) (j − 1)(2 − j)
e) (7 + πj)(π + j)
f) (2j + 1)πj
g) (j + 1)(j − 2)(j + 3)
2. Expresse os seguintes números complexos na forma a + bj, com a e b números reais.
a) (1 − j)−1
1
b) 3+j
c)
d)
e)
f)
2+j
2−j
1
2−j
1+j
j
j
1+j
3. Seja α um número complexo diferente de zero. Qual é o valor absoluto de α/α?
4. Sejam α e β dois números complexos. Mostre que αβ = αβ e que α + β = α + β.
8
Capı́tulo 1. Revisão sobre números complexos
Im
P
b
r
θ
a
Re
Figura 1.2: Representação polar de um número complexo. Note que o eixo das ordenadas (eixo y) é definido como
a parte imaginária do número complexo e o eixo das abcissas (eixo x) é dada pela parte real.
5. Mostre que a parte real de um número complexo é menor ou igual ao seu valor absoluto.
6. Prove que para qualquer dois números complexos z e w, temos que
a) |z| ≤ |z − w| + |w|
b) |z| − |w| ≤ |z − w|
c) |z| − |w| ≤ |z + w|.
1.3
Forma polar
Seja (x, y) = x + yj um número complexo. Sabemos que qualquer ponto no plano pode ser representado pelas
coordenadas polares (r, θ), conforme apresentado na Figura 1.2. Agora iremos mostrar como escrever um número
complexo em termos de tais coordenadas polares.
Seja θ um número real. Definimos a expressão ejθ como
ejθ = cos(θ) + j sin(θ).
Portanto, ejθ é um número complexo.
Por exemplo, se θ = π, então ejπ = −1.
Sejam x e y dois números reais e x + yj um número complexo. Seja
p
r = x2 + y 2 .
Se (r, θ) são coordenadas polares do ponto (x, y) no plano, então
x =r cos(θ),
y =r sin(θ).
Logo,
x + yj = r cos(θ) + r sin(θ)j = rejθ .
A expressão rejθ é chamada de forma polar do número complexo x + yj. O número θ é as vezes chamado de
ângulo ou argumento do número complexo.
Teorema 1.3. Sejam θ e ϕ números reais. Então
ejθ+jϕ = ejθ ejϕ .
Demonstração. Por definição temos
ejθ+jϕ = ej(θ+ϕ) = cos(θ + ϕ) + j sin(θ + ϕ).
Usando as identidades trigonométricas, temos que
cos(θ + ϕ) + j sin(θ + ϕ) = cos(θ) cos(ϕ) − sin(θ) sin(ϕ) + j(sin(θ) cos(ϕ) + sin(ϕ) cos(θ)).
Esta expressão é exatamente a mesma expressão que obtemos se multiplicássemos
(cos(θ) + j sin(θ))(cos(ϕ) + j sin(ϕ)).
1.4 Funções complexas
9
Teorema 1.4. Sejam α e β números complexos. Então
eα+β = eα eβ .
Demonstração. Seja α = a1 + a2 j e β = b1 + b2 j. Então
eα+β = e(a1 +b1 )+j(a2 +b2 ) = ea1 +b1 ej(a2 +b2 ) = ea1 eb1 eja2 +jb2 .
Usando o teorema anterior, vemos que esta última expressão é igual a
ea1 eb1 eja2 ejb2 = ea1 eja2 eb1 ejb2 .
Por definição, isto é igual a eα eβ , provando o teorema.
1.3.1
Exercı́cios
1. Reescreva os seguintes números complexos na forma polar:
a) 1 + j √
b) 1 + j 2
c) −3
d) 4j √
e) 1 − j 2
f) −5j
2. Reescreva os seguintes números complexos na forma ordinária x + yj.
a) e3πj
2
b) e 3 πj
π
c) πe− 3 j
3. Seja a + bj um número complexo. Encontre números reais a e b tal que
(x + yj)2 = a + bj,
expressando x e y em termos de a e b.
4. Para θ real, mostre que cos(θ) =
1.4
ejθ +e−jθ
2
e sin(θ) =
ejθ −e−jθ
.
2j
Funções complexas
Seja S ⊂ C um conjunto de números complexos. Uma relação na qual cada elemento de S associa um número
complexo é chamada de função complexa. Denotamos tal função pelo simbolo
f : S → C.
Se z é um elemento de S, podemos escrever a associação do valor f (z) para z através da seguinte notação
z 7→ f (z).
Podemos escrever ainda
f (z) = u(z) + j v(z),
onde u(z) e v(z) assumem valores reais, e portanto, z 7→ u(z) e z 7→ v(z). Note que u é a parte real de f e v a parte
imaginária de f .
Em geral, temos z = x + j y, na qual x e y são reais. Então, os valores da função f podem ser escritos na forma
f (z) = f (x + j y) = u(x, y) + j v(x, y).
Note que u e v podem ser vistas como funções de duas variáveis.
Exemplo 1.4. Para a função f (z) = z 2 e z = x + j y, com x, y ∈ R, temos
f (z) = z 2 = (x2 − y 2 ) + 2j xy.
Funções complexas mapeiam valores no plano complexo. Por exemplo, a função exponencial f (z) = ez = ex+j y =
e e mapeia o plano complexo de tal forma que qualquer segmento de reta vertical de comprimento 2π é mapeado
em uma circunferência, conforme apresentado na Figura 1.3. Além disso, para x = 0, então e2kπj = 1, para k ∈ Z.
x jy
10
Capı́tulo 1. Revisão sobre números complexos
j 4π
f
j 2π
ea
eb
b
a
Figura 1.3: Função exponencial complexa.
1.4.1
Exercı́cios
1. Considere a seguinte função complexa
f (x) =
2+jx
.
3 + j 4x
a) Determine a parte real e imaginária de f .
b) Determine f na forma polar e determine seu módulo e ângulo.
2. Limitando z a imaginário puro, mostre que a equação cos(z) = 2 pode ser representada como uma equação
quadrática padrão. Resolva esta equação para z.
3. Trace o gráfico das seguintes expressões em função da variável t:
a) x1 (t) = Re(2e(−1+j 2π)t ).
b) x2 (t) = Im(3 − e(1−j 2π)t ).
c) x3 (t) = 3 − Im(e(1−j 2π)t ).
4. Mostre que
a) ez = 1 se e somente se z = j 2kπ, para k ∈ Z.
b) ez = −1 se e somente se z = j (2k + 1)π, para k ∈ Z.
11
Capítulo 2
Sinais e Sistemas Lineares
2.1
Sinais
Um sinal é um conjunto de dados ou informações que podem ser usados para representar uma variedade de fenômenos
fı́sicos. Embora sinais possam ser representados de diversas formas, em todos os casos a informação em um sinal é
dada por um padrão de variação de alguma variável. Por exemplo, em um simples circuito elétrico com uma fonte
de tensão, um resistor e capacitor, os padrões de variação no tempo na fonte e da tensão no capacitor são exemplos
de sinais.
Sinais são representados matematicamente como funções de uma ou mais variáveis independentes. Um sinal
de voz, por exemplo, pode ser representado matematicamente pela pressão acústica em função do tempo. Uma
imagem pode ser representada pelo brilho em função de duas variáveis espaciais. Neste curso, iremos focar em sinais
envolvendo uma variável independente. Por conveniência, na maioria das vezes iremos usar o tempo como variável
independente.
2.1.1
Tamanho do sinal
Energia
A energia de um sinal contı́nuo no tempo é dada por
Z
E=
∞
|x(t)|2 dt.
(2.1)
|x(n)|2 .
(2.2)
−∞
No caso de sistemas de tempo discreto,
E=
∞
X
n=−∞
Note que, de acordo com (2.1)-(2.2), existirão casos em que a energia do sinal será dada por um valor finito e
casos em que a energia tenderá a infinito quando |t| → ∞.
2.1.2
Potência de um sinal
Quando a amplitude de um sinal não tende a zero para |t| → ∞, sua energia é infinita. Neste caso, o tamanho
do sinal pode ser melhor definido pela média temporal de sua energia, se ela existir. Esta medida é chamada de
potência do sinal. Para um sinal x(t) que assume valores reais, definimos a potência como
1
T →∞ T
Z
T /2
|x(t)|2 dt.
P = lim
(2.3)
−T /2
No caso de sinais de tempo discreto, x(n), a potência é dada por
+N
X
1
|x(n)|2 .
N →∞ 2N + 1
P = lim
(2.4)
n=−N
Observação 2.1. A definição de potência e de energia não estão dimensionalmente corretas. Isto acontece porque
não estamos usando o termo de potência (ou energia) no sentido ordinário, mas para indicar o tamanho do sinal.
A unidade de potência (ou energia) definida aqui depende da natureza do sinal x. Se x é um sinal de tensão (em
volts) sua potência terá unidade volts ao quadrado. Se x for um sinal de corrente (em amperes), sua potência será
amperes ao quadrado.
12
Capı́tulo 2. Sinais e Sistemas Lineares
3
1.5
1
2
0.5
1
x(t)
x(t)
2e− 2 t
0
−0.5
1
−1
0
−4
−3
−2
−1
0
t
1
2
3
−1.5
−4
4
(a)
−3
−2
−1
0
t
1
2
3
4
(b)
Figura 2.1: Gráfico dos sinais utilizados no Exemplo 2.1.
Note que de acordo com a definição de potência em (2.3)-(2.4), temos que P é uma média temporal do quadrado
da amplitude do sinal, ou seja, o valor médio quadrático de x(t). A raiz quadrada de P é conhecida como valor rms
( do inglês root mean square) de x.
Geralmente, a média de um sinal ao longo de um grande intervalo de tempo tendendo a infinito existe se o
sinal for periódico ou possuir uma regularidade estatı́stica. Se isto não é satisfeito, então a média não existirá. Por
exemplo, o sinal x(t) = t aumenta indefinidamente quando |t| → ∞ e nem a energia nem a potência existirão para
este sinal. Por outro lado, um sinal definido por partes da seguinte forma:x(t) = 0 para t < 0 e x(t) = 1 para t ≥ 0,
possui potência finita, embora não é periódico e nem possui regularidade estatı́stica.
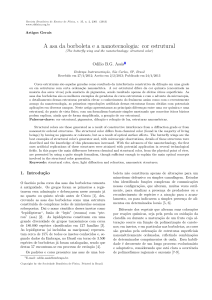
Exemplo 2.1. Determine as medidas adequadas dos sinais da Figura 2.1.
No primeiro caso, a amplitude do sinal tende a 0 quando |t| → ∞. Portanto, a medida adequada para esse sinal
é a sua energia E, dada por
Z
∞
2
Z
0
x (t)dt =
E=
−∞
Z
2
∞
2 dt +
−1
4e−t dt = 4 + 4 = 8.
0
No segundo caso da Figura 2.1, a amplitude do sinal não tende a zero quando |t| → ∞. Entretanto, ela é
periódica e, portanto, sua potência existe. Podemos simplificar o procedimento para cálculo da potência de sinais
periódicos observando que um sinal periódico se repete regularmente a cada perı́odo. Portanto,
P =
1
2
Z
1
t2 dt =
−1
1
.
3
Exemplo 2.2. Determine a potência e o valor rms de
a) x(t) = C cos(ω0 t + ω).
b) x(t) = C1 cos(ω1 t + ω1 ) + C2 cos(ω2 t + ω2 ), ω1 6= ω2 .
c) x(t) = Dejω0 t .
2.1.3
Operações com sinais
Deslocamento no tempo
Considere um sinal x(t) e o mesmo valor atrasado por T unidades de tempo, no qual denotaremos por φ(t) (Figura
2.2). Note que, o que acontece em x no instante de tempo t também irá acontecer em φ no instante t + T . Portanto,
φ(t + T ) =x(t),
φ(t) =x(t − T ).
Note que se T é positivo, então x(t − T ) representa o sinal x atrasado por T unidades de tempo. Se T é negativo,
então o deslocamento será dado por um avanço.
2.1 Sinais
13
1.25
1
x(t)
0.75
0.5
0.25
0
−3
−2
−1
0
t
1
2
3
−2
−1
0
t
1
2
3
−2
−1
0
t
1
2
3
1.25
1
x(t)
0.75
0.5
0.25
0
−3
1.25
1
x(t)
0.75
0.5
0.25
0
−3
Figura 2.2: Deslocamento temporal de um sinal.
Escalonamento no tempo
A compressão ou expansão de um sinal no tempo é conhecida como escalonamento temporal. Considere os sinais x
e φ apresentados na Figura 2.3. Note que φ representa x comprimido no tempo por um fator de 2. Portanto, tudo
que acontecer em x no instante t também acontecerá com φ no instante t/2. Logo,
t
φ
= x(t),
2
φ(t) = x(2t).
De maneira geral, quando escalonamos no tempo um sinal por um fator a, substituı́mos t por at. Se a > 1, o
escalonamento resulta em compressão, e se a < 1, o escalonamento resulta em expansão.
14
Capı́tulo 2. Sinais e Sistemas Lineares
Figura 2.3: Escalonamento temporal de um sinal.
Figura 2.4: Reversão temporal de um sinal.
Reversão no tempo
Considere o sinal x apresentado na Figura 2.4. Se rotacionarmos este sinal em 180◦ com relação ao eixo vertical
iremos obter sua versão reversa no tempo. Essa reflexão de x com relação ao eixo vertical nos fornece o sinal φ.
Observe que o que acontece no instante de tempo t para x(t), também irá acontecer no instante de tempo −t para
phi(t), e vice-versa. Portanto,
φ(t) = x(−t).
2.1.4
Classificação de sinais
Neste curso iremos considerar as seguintes classes de sinais:
• Contı́nuos e discretos no tempo.
• Analógicos e digitais.
• Periódicos e não periódicos.
• Energia e potência.
• Determinı́stico e probabilı́stico.
2.1 Sinais
15
Sinais contı́nuos e discretos no tempo
Se um sinal é definido para valores contı́nuos no tempo t, então classificamos ele como um sinal contı́nuo no tempo.
De maneira similar, sinais especificados apenas para valores discretos no tempo são chamados de sinais discretos no
tempo. Esta definição qualifica a natureza do sinal com relação ao tempo (eixo horizontal). A saı́da de um telefone
ou câmera de vı́deo é um sinal contı́nuo no tempo, enquanto que o produto interno bruto trimestral, as vendas
mensais de uma corporação e as médias diárias do mercado de ação são sinais discretos no tempo.
Sinais analógicos e digitais
Os termos analógico e digital qualificam a natureza da amplitude do sinal (eixo vertical). Um sinal analógico não é
necessariamente um sinal contı́no no tempo e um sinal digital não é necessariamente um sinal discreto no tempo.
Dizemos que um sinal é analógico se sua amplitude pode assumir qualquer valor em uma faixa contı́nua. Por
outro lado, um sinal é digital se sua amplitude pode assumir apenas uma faixa finita de valores. Sinais associados
com um computador digital são digitais porque eles podem assumir apenas valores binários.
É importante notar que os termos analógicos e digital qualificam a natureza da amplitude do sinal. Logo, um
sinal analógico não é necessariamente um sinal contı́nuo no tempo e um sinal digital não é necessariamente um
sinal discreto no tempo.
Sinais periódicos e não periódicos
Uma importante classe de sinais que iremos encontrar frequentemente é a classe de sinais periódicos. Um sinal
periódico contı́nuo no tempo x possui a propriedade de que existe um valor positivo T tal que
x(t) = x(t + T ),
para todos os valores de t. Em outras palavras, um sinal periódico possui a propriedade de que é inalterado por um
deslocamento T . Neste caso, dizemos que x é periódico com perı́odo T .
Observação 2.2. Se um sinal não satisfaz a definição acima, dizemos que ele é não periódico.
Se x(t) é periódico com perı́odo T , então x(t) = x(t + mT ) para todo t ∈ R e para m ∈ Z. Então, x também
é periódica com perı́odo 2T , 3T , 4T , .... O perı́odo fundamental de x é o menor valor positivo de T para o qual a
igualdade x(t) = x(t + T ) vale. Esta definição é valida para sinais x que não são constantes. Neste caso, o perı́odo
fundamental é indefinido, pois x é periódica para qualquer valor de T .
Sinais periódicos são definidos analogamente para o caso de tempo discreto. Especificamente, um sinal de tempo
discreto x é periódico com perı́odo N , com N ∈ N, se
x(n) = x(n + T ),
para todos os valores de n. Se a igualdade acima vale, então x é periódico com perı́odo 2N , 3N , .... O perı́odo
fundamental N é o menor valor positivo de N para o qual a igualdade acima vale.
Propriedades: Sejam x1 e x2 sinais periódicos com o mesmo perı́odo T . Então, os seguintes sinais também possuem
o mesmo perı́odo:
1. x(t) = Cx1 (t), C um número real ou complexo.
2. x(t) = x1 (t) ± x2 (t).
3. x(t) = x1 (t)x2 (t).
4. x(t) = x1 /x2 (t), se x2 6= 0 para todo t.
Sinais de energia e de potência
Um sinal com energia finita (veja as equações (2.1)-(2.2)) é um sinal de energia e um sinal com potência finita e
não nula (veja as equações (2.3)-(2.4)) é um sinal de potência.
Sinais determinı́sticos e aleatórios
Sinais deterministicos possuem descrição completamente conhecida. Neste caso, seus valores podem ser preditos
precisamente. Por outro lado, um sinal cujos valores não podem ser preditos precisamente, mas são conhecidos
apenas em termos de uma descrição probabilı́stica, é um sinal aleatório. Neste curso, nos limitaremos a estudar
somente sinais determinı́sticos.
16
Capı́tulo 2. Sinais e Sistemas Lineares
2.1.5
Alguns sinais importantes
Sinais pares e impares
Um conjunto de sinais com propriedades úteis refere-se àqueles que possuem simetria no tempo reverso. Um sinal
x é par se ele é igual a sua reflexão na origem, ou seja
x(−t) = x(t),
caso contı́nuo,
x(−n) = x(n),
caso discreto.
x(−t) = −x(t),
caso contı́nuo,
x(−n) = −x(n),
caso discreto.
ou
Um sinal é impar se
Note que um sinal impar é necessariamente igual a 0 em t = 0 ou n = 0, pois as equações acima requerem que
x(0) = −x(0).
Propriedades: As funções pares e ı́mpares possuem as seguintes propriedades:
1. função par × função ı́mpar = função ı́mpar.
2. função ı́mpar × função ı́mpar = função par.
3. função par × função par = função par.
As demonstrações das propriedades acima seguem diretamente da definição de funções e pares e ı́mpares.
Função degrau
Domı́nio do tempo discreto. A função degrau, denotada por u, é definida por
1, n ≥ 0,
u(n) =
0, n < 0.
Domı́nio do tempo contı́nuo. A função degrau de tempo contı́nuo é definida de maneira similar ao caso discreto.
Especificamente,
1, t ≥ 0,
u(t) =
0, t < 0.
Esta função pode ser utilizada quando queremos que um sinal comece em t = 0 (assim ele possui valor igual a
zero para t < 0). Neste caso, basta multiplicarmos o sinal por u.
A função degrau também é útil para especificar uma função com diferentes expressões em intervalos de tempo
diferentes.
Exemplo 2.3. Um pulso retangular pode ser representado através da seguinte expressão:
x(t) = u(t − 2) − u(t − 4).
Exemplo 2.4. O sinal apresentado na Figura 2.5 pode ser descrito através de duas componentes x1 e x2 . A componente x1 pode ser obtida através da multiplicação da rampa t pelo pulso u(t) = u(t − 2). Portanto,
x1 (t) = t(u(t) − u(t − 2)).
O sinal x2 pode ser representado pela multiplicação de uma rampa com inclinação -2 por um pulso:
x2 (t) = −2(t − 3)(u(t − 2) − u(t − 3)).
Logo,
x(t) = x1 + x2 (t) = tu(t) − 3(t − 2)u(t − 2) + 2(t − 3)u(t − 3).
2.1 Sinais
17
Figura 2.5: Representação de um sinal definido em intervalos.
O impulso unitário de tempo discreto
Um dos sinais de tempo discreto mais simples é o impulso unitário, que é definido por
0, n 6= 0,
δ(n) =
1, n = 0.
Note que existe uma relação entre o impulso unitário e a função degrau discreta. Em particular, o impulso
unitário é uma diferença de primeira ordem da função degrau:
δ(n) = u(n) − u(n − 1),
na qual u(n − 1) representa a função degrau atrasada em uma unidade.
De maneira similar, a função degrau de tempo discreto pode ser representada como um somatório de impulsos:
u(n) =
∞
X
δ(n − k).
k=0
O delta de Dirac
O delta de Dirac, δ, não pode ser definido como uma função, mas sim como um objeto matemático. De maneira
pouco precisa, o delta de Dirac pode ser definido como uma “função generalizada” na qual
∞, t = 0,
δ(t) =
0, t 6= 0,
e
Z
∞
δ(t)dt = 1.
−∞
Note que o delta de Dirac não pode ser considerado uma função no sentido clássico, pois qualquer função que
valha zero em todos os pontos exceto em t = 0 deve ter integral nula em toda a reta.
Observação 2.3. O operador δ pode ser interpretado como um sinal que tem duração infinitamente pequena, mas
com área unitária.
Propriedades: Seja x um sinal contı́nuo em t = 0. Então
1. x(t)δ(t) = x(0)δ(t).
R∞
2. −∞ x(t)δ(t)dt = x(0). (propriedade da amostragem)
O delta de Dirac também pode ser definido da seguinte forma (veja a Figura 2.6):
1. δ(t) = lim→0 δ (t). Logo, δ(t) = 0, para t 6= 0.
18
Capı́tulo 2. Sinais e Sistemas Lineares
2.
R∞
∞
δ(t)dt =
R∞
−∞
lim→0 δ (t)dt = lim→0
R∞
δ (t)dt
−∞ = 1.
Os calculos acima envolvem um processo de limite, o que foi feito, de fato, foi trocar a ordem dos processos de
limite, o que nem sempre é justificável.
Uma maneira de justificar rigorosamente os resultados dessa seção pode ser executada recorrendo-se à teoria das
distriuições, a qual considera o impulso unitário como função generalizada ou distribuição, o que inclui as funções
ordinárias da matemática convencional como casos particulares. Entretanto, isto está fora do escopo deste curso.
Agora, apresentaremos uma aplicação do delta de Dirac. Como a função degrau unitário u é descontı́nua para
t = 0, então sabemos que sua derivada não existe para t = 0 no sentido ordinário. Entretanto, no sentido gerenalizado
podemos verificar que essa derivada existe:
du
= δ(t),
dt
e consequentemente
Z
t
δ(τ )dτ = u(t).
−∞
A função exponencial
Seja s = σ + jω, com σ, ω ∈ R. A função exponencial é definida por
est = e(σ+jωt) = eσt ejωt = eσt (cos(ωt) + j sin(ωt)).
Como s = σ − jω, então
est = eσ−jωt = eσt e−jωt = eσt (cos(ωt) − j sin(ωt)),
e
eσt cos(ωt) =
1 st
(e + est ).
2
As seguintes funções são um caso especial ou podem ser descritas em termos de est :
1. Uma constante k = kest (considerando s = 0).
2. Uma exponencial monótona eσt (considerando ω = 0, s = σ).
3. Uma senoide cos(ωt) (considerando σ = 0, s = ±jω).
4. Uma senoide variando exponencialmente eσt cos(ωt) (considerando s = σ ± jω).
2.2
Sistemas
Sistemas fı́sicos, no sentido amplo, são conexões de componentes dispositivos e subsistemas. Num contexto que
engloba desde processamento de sinais, comunicação, motores eletromecânicos, veı́culos automotivos e plantas
quı́micas, um sistema pode ser visto como um processo em que um sinal de entrada é transformado pelos sistema
ou faz com que o sistema se comporte de uma determinada maneira, resultando em um outro sinal como saı́da. Por
exemplo, um sistema de tratamento de imagens é um sistema que possui como entrada uma imagem e transforma
ela em uma imagem com propriedades desejadas (diferente contraste, brilho, etc.).
Observação 2.4. Ao longo do texto usaremos a notação
x(t) → y(t),
para indicar que a entrada x(t) aplicada em um sistema induz a saı́da y(t).
Figura 2.6: O delta de Dirac e sua aproximação.
2.2 Sistemas
2.2.1
19
Classificação de sistemas
Os sistemas podem ser classificados de acordo com as seguintes categorias:
• Sem memória e com memória.
• Parâmetros constantes e parâmetros variantes no tempo.
• Causais e não causais.
• De tempo contı́nuo e de tempo discreto.
• Analógicos e digitais.
• Estáveis e instáveis.
• Linear e não linear.
Sistemas sem memória e com memória
Dizemos que um sistema não possui memória quando a saı́da no instante t depende apenas da entrada no instante
t, ou seja, a saı́da não depende dos valores de entrada nos instantes passados e futuros.
Quando um sistema não é sem memória dizemos que ele é com memória. Neste caso, a saı́da do sistema no
instante t depende de valores de entrada passados ou futuros.
Para descrever os sistemas com memória é importante sabermos a sua condição inicial, v(t0 ), juntamente com
a entrada aplicada para predizer a resposta para todo t ≥ t0 . Usaremos a seguinte notação para representar esta
classe de sistemas:
v(t0 ),
→ y(t), t ≥ t0 ,
x(t), t ≥ t0
na qual x é a entrada aplicada, v(t0 ) é a condição inicial e y é a saı́da do sistema.
Quando a entrada é nula e a condição inicial assume um determinado valor obtemos a resposta a entrada nula
do sistema. Quando a condição inicial é nula e a entrada do sistema assume um determinado valor, temos a resposta
ao estado nulo do sistema.
Como veremos mais a frente, a resposta de sistemas lineares com memória podem ser expressadas como:
Resposta total = Resposta a entrada nula + resposta ao estado nulo.
Sistemas com parâmetros constante e parâmetros variantes no tempo
Conceitualmente, um sistema é invariante no tempo (com parâmetros constantes) se seu comportamento e caracterı́sticas são fixas no tempo. Por exemplo, um circuito com resistores e capacitores é invariante no tempo se os valores
das resistências e capacitâncias são constantes: esperamos obter os mesmos resultados deste circuito se realizamos
um teste hoje e repetirmos ele amanhã. Por outro lado, se os valores das resistências e capacitâncias flutuam no
tempo, então teremos resultados diferentes.
A propriedade de invariância no tempo pode ser descrita de maneira simples usando os termos de sinais e
sistemas que estamos utilizando neste curso. Especificamente, um sistema é invariante no tempo se a propriedade
de deslocamento do sinal de entrada resulta em um deslocamento idêntico do sinal de saı́da. Isto é, se y(n) é a saı́da
de um sistema discreto e invariante no tempo para uma entrada x(n), então y(n − n0 ) é a saı́da quando x(n − n0 )
é aplicada, para algum n0 ∈ N.
Sistemas causais e não causais
Um sistema é causal se saı́da em qualquer instante de tempo depende somente de valores de entrada no instante de
tempo presente e de instantes do passado. Tal sistema também é chamado de não antecipativo, já que a saı́da não
antecipa valores futuros da entrada.
Os seguintes sistemas não são causais:
y(t) = x(t + 1),
y(n) = x(n) − x(n + 1).
Todos os sistemas sem memória são causais, já que a saı́da está relacionada somente com o valor atual da
entrada.
Embora sistemas causais são de grande importância, eles não constituem os únicos sistemas práticos. Por exemplo,
causalidade não é uma restrição essencial para aplicações em que a variável independente não é o tempo, tal como
processamento de imagem.
20
Capı́tulo 2. Sinais e Sistemas Lineares
Sistemas de tempo contı́nuo e tempo discreto
Um sistema de tempo contı́nuo é um sistema na qual o sinal de entrada é contı́nuo no tempo e como resultado, o
sinal de saı́da também sera contı́nuo no tempo.
Similarmente, um sistema de tempo discreto irá transformar uma entrada de tempo discreto em uma saı́da de
tempo discreto.
Sistemas analógicos e digitais
Um sistema cujos sinais de entrada e saı́da são analógicos é chamado de sistema analógico. Por outro lado, um
sistema cujos sinais de entrada e saı́da são digitais é um sistema digital. Detalhes sobre a definição de sinais
analógicos e digitais foram apresentados nas seções anteriores.
Sistemas estáveis e instáveis
Os sistemas também podem ser classificados como estáveis ou instáveis. A estabilidade pode ser interna ou externa.
Se cada entrada limitada aplicada ao terminal de entrada resultar em uma saı́da limitada, o sistema é dito ser
externamente estável. A estabilidade externa pode ser verificada pela medição dos terminais externos (entrada e
saı́da) do sistema. Este tipo de estabilidade também é conhecida como estabilidade no sentido BIBO (do inglês
bounded-input/bounded-output).
Sistemas lineares e não lineares
Um sistema linear, contı́nuo ou discreto no tempo, é um sistema que possui a importante propriedade da superposição:
se uma entrada consiste em uma soma ponderada de diversos sinais, então a saı́da é a superposição (isto é, uma
soma ponderada) da resposta do sistema para cada um daqueles sinais. Mais precisamente, seja y1 a resposta de
um sistema para uma entrada x1 , e seja y2 a saı́da correspondente da entrada x2 . Então o sistema é linear se:
1. A resposta para x1 + x2 = y1 + y2 .
2. A resposta para ax1 é ay1 , na qual a é qualquer valor real.
A primeira destas propriedades é conhecida como aditividade e a segunda é a propriedade do escalonamento ou
homogeneidade. Estas definições são equivalentes tanto para sistemas contı́nuos, quanto para discretos.
Note que as duas condições acima são equivalentes a:
se x1 → y1 , e x2 → y2 , então k1 x1 + k2 x2 → k1 y1 + k2 y2 .
Uma consequência direta da propriedade da superposição é que, se a = 0 (veja a propriedade da homogeneidade
acima), então
0 = 0x(t) → 0y(t) = 0.
Observação 2.5. Quando tratamos sistemas com memória, as condições acima devem ser complementadas com a
condição inicial do sistema, ou seja, se v1 (t0 ) e v2 (t0 ) são condições iniciais do sistema, então
v1 (t0 )
x1 (t)
→ y1 (t), t ≥ t0 , e
v2 (t0 )
x2 (t)
→ y2 (t), t ≥ t0 ,
implicam que
v1 (t0 ) + v2 (t0 )
x1 (t) + x2 (t)
v(t0 )
x(t)
kv(t0 )
kx(t)
→ y1 (t) + y2 (t), t ≥ t0 .
Além disso, se
→ y(t), t ≥ t0 ,
então para qualquer constante k
→ ky(t), t ≥ t0
2.3 Exercı́cios
21
Exemplo 2.5. Considere um sistema descrito por
y(t) = tx(t).
Iremos analisar se este sistema é linear. Fixe duas entradas x1 (t) e x2 (t). Então
y1 (t) = tx1 (t),
y2 (t) = tx2 (t).
Tome as constantes k1 e k2 , e considere,
x3 (t) = k1 x1 (t) + k2 x2 (t).
Logo,
y3 (t) = tx3 (t) = t(k1 x1 (t) + k2 x2 (t)) = tk1 x1 (t) + tk2 x2 (t) = k1 x1 (t) + k2 x2 (t).
Portanto este sistema é linear.
Exemplo 2.6. Considere o seguinte sistema:
dy
(t) + t2 y(t) = (2t + 3)x(t),
dt
com condição inicial y(t0 ).
Suponha que
x1 (t) → y1 (t)
x2 (t) → y2 (t).
Fixe k1 e k2 e tome
x3 = k1 x1 (t) + k2 x2 (t).
Seja y3 a saı́da correspondente a entrada x3 . Devemos provar que y3 (t) = k1 y1 (t) + k2 y2 (t). De fato, note que
dy1
(t) + t2 y1 (t) = (2t + 3)x1 (t),
dt
dy2
(t) + t2 y2 (t) = (2t + 3)x2 (t),
dt
Além disso,
dy3
dy1
dy2
(t) + t2 y3 (t) = (2t + 3)x3 (t), = (2t + 3) [k1 x1 (t) + k2 x2 (t)] = k1
(t) + t2 y1 (t) + k2
(t) + t2 y2 (t)
dt
dt
dt
d(k1 y1 + k2 y2 )
=
+ t2 (k1 y1 (t) + k2 y2 (t)) = (2t + 3)x3 (t)
dt
Assim, y3 e k1 y1 (t) + k2 y2 (t) são soluções da equação diferencial para a entrada x3 . Pela unicidade da solução
dessa equação diferencial ordinária, temos y3 (t) = k1 y1 (t) + k2 y2 (t). Portanto, este sistema é linear.
2.3
Exercı́cios
1. Determine a potência e energia
n de cada um dos seguintes sinais:
a) x1 (t) = e−4t u(t); x1 (n) = 21 u(n).
b) x2 (t) = cos(t); x2 (n) = cos π4 n .
2. Seja x(n) um sinal com x(n) = 0 para n < −2 e n > 4. Para cada sinal abaixo, determine os valores de n para o
qual é garantido ser igual a zero.
a) x(n − 3).
b) x(n + 4).
c)x(−n)
d) x(−n + 2).
3. Considere os sinais (assumindo valores reais) de energia x1 (t), com energia E[x1 (t)], e x2 (t), com energia E[x2 (t)].
Além disso considere T uma constante real não nula. Prove as seguintes relações:
22
Capı́tulo 2. Sinais e Sistemas Lineares
a) E[T x1 (t)] = T 2 E[x1 (t)].
b) E[x1 (t)] = E[x1 (t − T )].
c) E[x1 (T t)] = 1/T E[x1 (t)].
4. Determine qual dos seguintes sinais é periódico. Se o sinal é periódico, determine o perı́odo fundamental.
a) x(t) = jej10t .
b) x(t) = e(−1+j)t .
c) x(n) = ej7πn .
5. Determine o perı́odo fundamental do sinal x(t) = 2 cos(10t + 1) − sin(4t − 1).
6. Considere o o sinal contı́nuo no tempo x(t) = δ(t + 2) − δ(t − 2). Calcule o valor da energia de y(t) =
Rt
−∞
x(τ )dτ .
7. Sejam as propriedades de sistemas estudadas neste capı́tulo: sem memória, invariante no tempo, linear, causal e
estável. Determine qual destas propriedades vale e qual não vale para cada um dos seguintes sistemas. Considere y
a saı́da do sistema e x sua entrada.
a) y(t) = x(t − 2) + x(2 − t).
b) y(t) = cos(3t)x(t).
R 2t
c) y(t) = −∞ x(τ )dτ .
0,
t < 0,
d) y(t) =
x(t)
+
x(t
−
2),
t≥0
0,
x(t) < 0,
e) y(t) =
x(t) + x(t − 2), x(t) ≥ 0.
f) y(t) = x(t/3).
8. Mostre que o sistema discreto no tempo com entrada x(n), saı́da y(n) e relacionados por y(n) = Re(x(n)) é
aditivo. Este sistema permanece aditivo se a relação de saı́da é mudada para y(n) = Re(ejπ/4 n x(n))?
9. Defina 2x(−3t + 1) = t(u(−t − 1) − u(−t + 1)), na qual u é a função degrau unitário.
a) Trace 2x(−3t + 1) para uma faixa adequada de t.
b) Trace x(t) para uma faixa adequada de t.
10.R Calcule as seguintes integrais:
∞
a) −∞ δ(τ )x(t − τ )dτ
R∞
b) −∞ x(τ )δ(t − τ )dτ
R∞
c) −∞ δ(t)e−jωt dt
R∞
d) −∞ (t3 + 4)δ(1 − t)dt
11. Para os seguintes sistemas, com entrada x e saı́da y, determine quais são lineares e quais são não lineares:
2
a) dy
dt (t) + 2y(t) = x (t).
dy
b) dt (t) + 3ty(t) = t2 x(t).
c) 3y(t) + 2 = x(t).
(t) + y 2 (t) = x(t).
d) dy
dt
2
e) dy
+ 2y(t) = x(t).
dt (t)
Rt
f) y(t) = −∞ x(τ )dτ .
12. Um sistema é especificado pela seguinte relação:
y(t) =
x2 (t)
.
dx/dt
Mostre que o sistema satisfaz a propriedade de homogeneidade, mas não a propriedade aditiva.
13. Para os sistemas descritos pelas seguintes equações, com entrada x e saı́da y, determine quais são causais e quais
são não causais.
a) y(t) = x(t − 2).
b) y(t) = x(−t).
c) y(t) = x(at), com a > 1.
d) y(t) = x(at), com a < 1.
23
Capítulo 3
Análise de sistemas lineares no domínio do tempo
3.1
Sistemas lineares discretos e invariantes no tempo
Nesta seção apresentaremos alguns exemplos de sistemas lineares, discretos e invariantes no tempo (LDIT). A
equação destes sistemas apresenta uma estrutura que é conhecida como equação a diferença, que motiva a classe
de sistemas na qual a teoria será desenvolvida.
Exemplo 3.1. Uma pessoa faz regularmente um depósito (entrada) em um banco com um intervalo de tempo T . O
banco paga um certo juros na conta bancária durante o perı́odo T e envia periodicamente uma correspondência com
o saldo (saı́da) ao depositante. Determine a equação que relaciona a saı́da y (o saldo) com a entrada x (o depósito).
Seja x(n) o depósito feito no n-ésimo instante discreto, y(n) o saldo da conta no n-ésimo instante calculado
imediatamente após o recebimento do n-ésimo depósito e r a taxa de juros por real por perı́odo T .
O saldo y(n) é a soma de
• do saldo anterior y(n − 1);
• dos juros obtidos em y(n − 1) durante o perı́odo T ;
• do depósito x(n).
Então,
y(n) = y(n − 1) + ry(n − 1) + x(n) = (1 + r)y(n − 1) + x(n),
ou ainda
y(n) − ay(n − 1) = x(n),
com a = (1 + r)
Exemplo 3.2. Em um semestre n, x(n) estudantes se inscreveram em um curso que precisa de um certo livro-texto.
Uma editora vendeu y(n) cópias do livro no n-ésimo semestre. Na média, um quarto dos estudantes com o livro
em boas condições revende os livros no final do semestre, sendo a vida média do livro de três semestres. Escreva a
equação que relaciona y(n), os novos livros vendidos pela editora, com x(n), o número de estudantes inscritos no
n-ésimo semestre, considerando que todos os estudantes compram livros.
No n-ésimo semestre, o total de livros x(n) vendido aos estudantes deve ser igual a y(n) mais os livros utilizados
pelos estudantes em dois semestres anteriores (porque o tempo de vida de um livro é de apenas três semestres).
Existem y(n − 1) novos livros vendidos no semestre (n − 1), e um quarto destes livros, ou seja, 14 y(n − 1), são
revendidos no semestre n. Além disso, y(n − 2) novos livros foram vendidos no semestre (n − 2) e um quarto destes,
1
ou seja, 14 y(n − 2) serão vendidos no semestre (n − 1). Novamente, um quarto destes, ou seja 16
y(n − 2) serão
1
1
revendidos no semestre n. Portanto, x(n) deve ser igual a soma de y(n), 4 y(n − 1) e 16 y(n − 2):
1
1
y(n) + y(n − 1) + y(n − 2) = x(n).
4
16
3.1.1
Equações a diferenças lineares com coeficientes constantes
Uma equação a diferenças de ordem N com coeficientes constantes é dada por
y(n + N ) + a1 y(n + N − 1) + · · · + aN −1 y(n + 1) + aN y(n) = bN −M x(n + M )+
bN −M +1 x(n + M − 1) + · · · + bN −1 x(n + 1) + bN x(n). (3.1)
24
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
na qual ai ∈ R, i ∈ {1, . . . , N } e bj ∈ {N − M, N }.
Para um sistema causal, a saı́da não pode depender de valores futuros da entrada. Isto significa que (3.1) satisfaça
M ≤ N.
Substituindo n por n − N , a expressão (3.1) pode ser reescrita para
y(n) + a1 y(n − 1) + · · · + aN −1 y(n − N + 1) + aN y(n − N ) = bN −M x(n − N + M )+
bN −M +1 x(n − N + M − 1) + · · · + bN −1 x(n − N + 1) + bN x(n − N ). (3.2)
A equação a diferença em (3.1) está escrita na forma de operador avanço, enquanto que (3.2) está escrita na
forma de operador atraso.
Note que se assumirmos que M ≤ N , então o lado direito da expressão acima depende apenas de valores passados
de x.
Solução recursiva de equações a diferença
A expressão (3.2) pode ser reorganizada para
y(n) = −a1 y(n − 1) − aN −1 y(n − N + 1) − · · · − aN y(n − N ) + bN −M x(n − N + M )+
bN −M +1 x(n − N + M − 1) + · · · + bN −1 x(n − N + 1) + bN x(n − N ).
Então, y(n) é calculada a partir de N + M + 1 informações: os N valores da saı́da, y(N − 1), . . . , y(n − N ), os
2M + 1 valores de entrada x(n − N + 1), x(n − N + M − 1), . . . , x(n − N ). Inicialmente, para calcular y(n), as
N condições iniciais y(−1), y(−2), . . . , y(−N ) servem como N valores anteriores da saı́da. Logo, conhecendo as
N condições iniciais e a entrada podemos determinar toda a saı́da y(0), y(1), . . . recursivamente, um valor a cada
instante.
Exemplo 3.3. Resolva interativamente
y(n) − 0.5y(n − 1) = x(n),
(3.3)
com condição inicial y(−1) = 16 e entrada causal x(n) = n2 (começando em n = 0).
Note que (3.3) pode ser reescrita para
y(n) = 0.5y(n − 1) + x(n)
(3.4)
Logo, fazendo n = 0 obtemos
y(0) = y(−1) + x(0) = 0.5(16) + 0 = 8.
Agora, fazendo n = 1 em (3.4) e usando o valor y(0) = 8 e x(1) = 12 = 1, obtemos,
y(1) = 0.5(8) + 12 = 5.
Continuando esse processo iterativo, iremos obter
y(2) = 0.5(5) + 22 = 6.5,
y(3) = 0.5(6.5) + 32 = 12.25,
..
.
Apesar dessa forma interativa ser útil em diversas situações, uma solução fechada de uma equação a diferenças é
muito mais útil no estudo do comportamento do sistema e sua dependência com a entrada e os vários parâmetros do
sistema. Por este motivo, desenvolveremos um procedimento sistemático para analisar sistemas em tempo discreto.
Solução fechada de equações a diferenças
Notação operacional
Considere
Ex(n) = x(n + 1),
E 2 x(n) = x(n + 2),
..
.
E N x(n) = x(n + N ).
3.1 Sistemas lineares discretos e invariantes no tempo
25
Em outras palavras, o operador E representa a operação de avanço da sequência por uma unidade de tempo.
Então, a equação (3.1) pode ser escrita como
(E N + a1 E N −1 + · · · + aN −1 E + aN )y(n) = (bN −M E N −M + bN −M +1 E N −M −1 + · · · + bN −1 E + bN )x(n), (3.5)
ou
Q(E)y(n) = P (E)x(n),
(3.6)
na qual
Q(E) = E N + a1 E N −1 + · · · + aN −1 E + aN ,
P (E) = bN −M E N −M + bN −M +1 E N −M −1 + · · · + bN −1 E + bN .
Resposta de sistemas lineares em tempo discreto
Sistemas lineares possuem um propriedade importante na qual permite a decomposição da sua solução em duas
componentes: a componente de entrada nula e a componente de estado nulo. Esta propriedade é conhecida como
propriedade da decomposição. Isto pode ser verificado a partir da (3.6). De fato, se y0 (n) é a resposta de entrada
nula, então por definição
Q(E)y0 (n) = 0.
Se y(n) é a resposta de estado nulo, então y(n) é a solução de
Q(E)y(n) = P (E)x(n),
sujeito a condições iniciais nulas. Somando as duas equações, temos
Q(E)(y0 (n) + y(n)) = P (E)x(n).
Portanto, y0 (n) + y(n) é a solução geral de (3.6).
A componente de entrada nula é a resposta do sistema quando a entrada x(n) = 0 e portanto, é resultado
somente das condições internas do sistema (tal como as energias armazenadas, as condições iniciais). Por outro lado,
a componente de estado nulo é a resposta do sistema a entrada externa x(n) quando o sistema está em estado nulo,
significando a ausência de qualquer energia interna armazenada, ou seja, todas as condições iniciais são zero.
Neste contexto, nas próximas seções iremos desenvolver um método para calcular a resposta de entrada nula e
a resposta de estado nulo da equação a diferenças (3.6).
Resposta do sistema a condições internas: Resposta de entrada nula
A resposta y0 (n) de entrada nula é a solução de (3.6) com x(n) = 0 para todo n ∈ N, ou seja,
Q(E)y0 (n) = 0,
(3.7)
ou ainda
(E N + a1 E N −1 + · · · + aN −1 E + aN )y0 (n) = 0,
ou
y0 (n + N ) + a1 y0 (n + N − 1) + · · · + aN −1 y0 (n + 1) + aN y0 (n) = 0.
Note que a expressão acima afirma que a combinação linear de y0 (n) e avanços de y0 (n) é zero para todo n ∈ N.
Isto é possı́vel se e somente se y0 (n) e seus avanços tiverem a mesma forma. Apenas a expressão γ n satisfaz essa
propriedade. Além disso, note que E k (γ n ) = γ n+k = γ k γ n . Portanto, a solução de (3.7) deve ser da forma
y0 (n) = cγ n .
Substituindo (3.8) em (3.7), temos
c(γ N + a1 γ N −1 + · · · + aN −1 γ + aN )γ n = 0.
Para uma solução não trivial desta equação,
γ N + a1 γ N −1 + · · · + aN −1 γ + aN = 0,
(3.8)
26
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
ou
Q(γ) = 0.
Como Q(γ) é um polinômio de ordem N , podemos reescrever a expressão acima como (forma de fatores)
(γ − γ1 )(γ − γ2 ) . . . (γ − γN ) = 0.
se Q(γ) possuir N raı́zes distintas. O caso de raı́zes repetidas será discutido mais adiante.
Logo,γ possui N soluções γ1 , γ2 , . . . , γN e portanto (3.7) possui N soluções c1 γ1 , . . . , cN γN . Portanto,
n
y0 (n) = c1 γ1n + c2 γ2n + · · · + cN γN
,
na qual γ1 , . . . , γN são as raı́zes de Q(γ) e c1 , . . . , cN são constantes determinadas das condições iniciais do problema.
O polinômio Q(γ) é chamado de polinômio caracterı́stico do sistema e Q(γ) = 0 é a equação caracterı́stica do
n
sistema. Além disso, γ1 , . . . , γN são as raı́zes da equação caracterı́sticas. As exponenciais γ1n , . . . , γN
são os modos
caracterı́sticos do sistema.
Raı́zes repetidas
Os desenvolvimentos acima são válidos para o caso em que o sistema possui N raı́zes caracterı́sticas distintas γ1 ,
. . . , γN . Se duas ou mais raı́zes coincidirem, a forma dos modos caracterı́sticos é modificada. Se a raiz γ repete r
vezes, os modos caracterı́sticos para esta raiz são γ n , nγ n , n2 γ n , . . . , nr−1 γ n . Portanto, se a equação caracterı́stica
do sistema for
Q(γ) = (γ − γ1 )r (γ − γr+1 )(γ − γr+2 ) . . . (γ − γN )
a resposta a entrada nula neste caso será
n
n
n
y0 (n) = (c1 + c2 n + c3 n2 + · · · + cr nr−1 )γ1n + cr+1 γr+1
+ cr+2 γr+2
+ · · · + cN γ N
.
Raı́zes complexas
As raı́zes complexas de um sistema em tempo discreto ocorrem em pares de conjugados se os coeficientes da
equação do sistema forem reais. Raı́zes complexas podem ser tratadas exatamente como tratamos raı́zes reais.
Inicialmente expressamos as raı́zes conjugadas complexas γ e γ̄ na forma polar. Se γ é a amplitude e β é o
ângulo de γ, então
γ = |γ|ejβ ,
e
γ̄ = |γ|e−jβ .
A resposta a entrada nula é dada por
y0 (n) = c1 γ n + c2 (γ̄)n = c1 |γ|ejβn + c2 |γ|e−jβn
Para um sistema real, c1 e c2 devem ser conjugados, tal que y(n) seja uma função real de n. Seja c1 = 2c ejθ e
c1 = 2c e−jθ . Então
y0 (n) =
c n j(βnθ)
|γ| (e
+ e−j(βnθ) ) = c|γ|n cos(βn + θ).
2
Exemplo 3.4. Considere um sistema LDIT descrito pela seguinte equação:
y(n + 2) − 0.6y(n + 1) − 0.16y(n) = 5x(n + 2).
Determine a componente de entrada nula se as condições iniciais forem y(−1) = 0 e y(−2) = 25/4.
Reescrevendo a equação do sistema na notação operacional, temos
(E 2 − 0.6E − 0.16)y(n) = 5E 2 x(n).
O polinômio caracterı́stico é
γ 2 − 0.6γ − 0.16 = (γ + 0.2)(γ − 0.8).
A equação caracterı́stica é
(γ + 0.2)(γ − 0.8) = 0.
(3.9)
3.1 Sistemas lineares discretos e invariantes no tempo
27
Portanto, as raı́zes caracterı́sticas são γ1 = −0.2 e γ2 = 0.8. A resposta de entrada nula é
y0 (n) = c1 (−0.2)n + c2 (0.8)n .
Para encontrar o valor de c1 e c2 , fazemos n = −1 e n = −2 na expressão acima e então, substituı́mos os valores
da condição inicial, isto é, y(−1) = 0 e y(−2) = 25/4:
5
0 = −5c1 + c2 ,
4
25
25
= 25c1 + c2 .
4
16
Resolvendo o sistema de equações acima, obtemos c1 =
Portanto, a componente de entrada nula de (3.9) é
y0 (n) =
1
5
e c2 = 45 .
4
1
(−0.2)n + (0.8)n ,
5
5
para n ≥ 0.
Exemplo 3.5. Considere um sistema LDIT descrito pela seguinte equação:
y(n + 2) + 6y(n + 1) + 9y(n) = 2x(n + 2) + 6x(n + 1).
(3.10)
Calcule a componente de entrada nula para a condição inicial y(−1) = − 31 e y(−2) = − 92 .
Reescrevendo a equação do sistema na notação operacional, temos
(E 2 + 6E + 9)y(n) = (2E 2 + 6E)x(n).
O polinômio caracterı́stico é γ 2 + 6γ + 9 = (γ + 3)2 , na qual possui uma raiz caracterı́stica repetida para γ = −3.
Os modos caracterı́sticos são (−3)n e n(−3)n . Logo, a resposta a entrada nula é
y(n) = (c1 + c2 n)(−3)n .
Para determinar os coeficientes c1 e c2 , podemos proceder como no exemplo anterior. Neste caso, obtemos o
seguinte sistema de equações lineares:
1
1
1
= − c1 + c2 ,
3
3
3
2
1
2
− = c1 − c2 .
9
9
9
−
A solução deste sistema de equações é c1 = 4 e c2 = 3. Portanto, a componente de entrada nula de (3.10) é
y0 (n) = (4 + 3n)(−3)n .
Exemplo 3.6. Considere um sistema LDIT descrito pela seguinte equação:
y(n + 2) − 1.56y(n + 1) + 0.81y(n) = x(n + 1) + x(n).
(3.11)
Calcule a componente de entrada nula para a condição inicial y(−1) = 2 e y(−2) = 1.
A forma operacional de (3.11) é
(E 2 − 1.56E + 0.81)y(n) = (E + 3)x(n).
O polinômio caracterı́stico é γ 2 − 1.56γ + 0.81 = (γ − 0.78 − 0.45j)(γ − 0.78 + 0.45j). As raı́zes caracterı́sticas
são 0.78 ± 0.45j, ou seja, 0.9e±π/6 . Podemos escrever a solução como
y0 (n) = c0.9nejπn/6 + c0.9nejπn/6 .
Fazendo n = −1 e n = −2 e usando as condições iniciais y(−1) = 2 e y(−2) = 1, obtemos c = e−j0.17 e
c = 2.34ej0.17 .
Resposta do sistema à entrada externa: Resposta de estado nulo
Antes de apresentar a metodologia de cálculo da resposta de estado nulo de sistemas LDIT, iremos aprender como
se calcula a resposta ao impulso unitário. Depois verificaremos que o cálculo da resposta de sistemas LDIT para
sinais de entrada genéricos podem ser obtidos a partir da resposta ao impulso unitário.
Resposta ao impulso unitário
28
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
Considere um sistema de ordem N representado por
Q(E)y(n) = P (E)x(n).
A resposta h(n) ao impulso é a solução desta equação para a entrada δ(n) com todas as condições iniciais nulas,
isto é,
Q(E)h(n) = P (E)δ(n),
(3.12)
sujeita às condições iniciais
h(−1) = h(−2) = · · · = h(−N ) = 0.
Exemplo 3.7. Determine a resposta ao impulso unitário de um sistema descrito por
y(n) − 0.6y(n − 1) − 0.16y(n − 2) = 5x(n).
(3.13)
Considere x(n) = δ(n) e y(n) = h(n) em (3.13). Então
h(n) − 0.6h(n − 1) − 0.16h(n − 2) = 5δ(n),
sujeito a condição inicial h(−1) = h(−2) = 0.
Fazendo n = 0 na expressão anterior, obtemos
h(0) = 0.6(0) − 0.16(0) = 5(1) =⇒ h(0) = 5.
Para n = 1 e usando h(0) = 5, obtemos
h(1) − 0.6(5) − 0.16(0) = 5(0) =⇒ h(1) = 3.
Continuando este procedimento podemos determinar o valor de h(n) para qualquer instante de tempo n.
Solução fechada de h(n)
Usando o fato de que h(n) é a resposta do sistema para a entrada δ(n), que é zero para n > 0, sabemos que
h(n) deve ser constituı́do somente pelos modos caracterı́sticos do sistema para n > 0. Para n = 0, a equação geral
de h(n) é
h(n) = A0 δ(n) + yc (n)y(n),
(3.14)
na qual yc (n) é a combinação linear dos modos caracterı́sticos.
Substituindo (3.14) em (3.12) temos Q(E)(A0 δ(n) + yc u(n)) = P (E)δ(n). Como yc (n) é constituı́do pelos modos
caracterı́sticos, então Q(E)yc (n)u(n) = 0. Logo, A0 Q(E)δ(n) = P (E)δ(n), ou ainda,
A0 (δ(n + N ) + a1 δ(n + N − 1) + · · · + aN δ(n)) = b0 δ(n + N ) + · · · + bN δ(n).
Fazendo n = 0 e usando o fato de que δ(m) = 0 para todo m 6= 0 e δ(0) = 1, obtemos que A0 =
coeficientes desconhecidos de yc (n) podem ser determinados do conhecimento de N valores de h(n).
bN
aN
. Os N
Exemplo 3.8. Determine a resposta fechada ao impulso do seguinte sistema
y(n) − 0.6y(n − 1) − 0.16y(n − 2) = 5x(n).
Primeiramente, devemos reescrever essa expressão na seguinte forma:
y(n + 2) − 0.6y(n + 1) − 0.16y(n) = 5x(n + 2),
ou ainda
(E 2 − 0.6E − 0.16)y(n) = 5E 2 x(n).
O polinômio caracterı́stico é
γ 2 − 0.6γ − 0.16 = (γ + 0.2)(γ − 0.8).
Os modos caracterı́stico são (−0.2)n e (−0.8)n . Portanto,
yc (n) = c1 (−0.2)n + c2 (0.8)n .
(3.15)
3.1 Sistemas lineares discretos e invariantes no tempo
29
A partir de (3.15) temos que aN = −0.16 e bN = 0. Logo,
h(n) = (c1 (−0.2)n + c2 (0.8)n )u(n).
(3.16)
Para encontramos os valores de c1 e c2 , precisamos determinar dois valores de h(n) interativamente. Conforme
o exemplo anterior, sabemos que h(0) = 5 e h(1) = 3. Logo, fazendo n = 0 e n = 1 em (3.16), obtemos o seguinte
sistema de equações lineares:
5 = c1 + c2 ,
3 = −0.2c1 + 0.8c2 ,
que possui como solução c1 = 1 e c2 = 4.
Portanto, a forma fechada da resposta ao impulso de (3.13) é
h(n) = [(−0.2)n + 4(0.8)n ] u(n).
Exercı́cios
1. Resolva recursivamente (apenas os três primeiros termos) das equações:
a) y(n + 1)0.5y(n) = 0, y(−1) = 10.
b) y(n + 1) + 2y(n) = x(n + 1), com x(n) = e−n u(n) e y(−1) = 0.
c) y(n) − 0.6y(n) − 0.16y(n − 2) = 0, y(−1) = 25 e y(−2) = 0.
2. Resolva a seguinte equação recursivamente (somente os três primeiros termos):
y(n + 2) + 3y(n + 1) + 2y(n) = x(n + 2) + 3x(n + 1)3x(n),
com x(n) = 3n u(n), y(−1) = 3 e y(−2) = 2.
3. Considere o sistema de tempo discreto y(n) + y(n − 1) + 0.25y(n − 2) = x(n − 8). Determine a resposta de entrada
nula se y(−1) = 1 e y(1) = 1.
4. Determine a resposta de entrada nula dos seguintes sistemas:
a) y(n + 1) − 0.8y(n) = 3x(n + 1), y(−1) = 10.
b) y(n + 1) = 0.8y(n) = 3x(n + 1), , y(−1) =√10.
√
c) y(n) + 4y(n − 2) = 2x(n), y(−1) = −1/(2 2), y(−2) = 1/(4 2).
5. Determine a resposta ao impulso dos seguintes sistemas lineares discretos e invariantes no tempo:
a) y(n + 1) − y(n) = x(n).
b) y(n) − 5y(n − 1) = 6y(n − 2) = 8x(n − 1) − 19x(n − 2).
c) y(n + 2) − 4y(n + 1) + 4y(n) = 2x(n + 2) − 2x(n + 1).
d) y(n) = 2x(n) − 2x(n − 1).
6. Determine a resposta ao impulso de um sistema linear discreto, e invariante no tempo descrito pela equação
y(n) = 3x(n) − 5x(n − 1) − 2x(n − 3).
7. Considere um sistema discreto, linear, causal e invariante no tempo cuja entrada x(n) e saı́da y(n) estão
relacionadas pela seguinte equação a diferenças:
y(n) =
1
y(n − 1) + x(n).
4
Determine y(n) se x(n) = δ(n − 1).
8. Considere a seguinte equação a diferenças de primeira ordem:
y(n) + 2y(n − 1) = x(n).
Assumindo que o sistema está inicialmente em repouso (isto é, se x(n) = 0 para n < 0, então y(n) = 0 para
n < 0), encontre a resposta ao impulso do sistema.
30
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
A resposta de estado nulo
Conforme mencionamos nas seções anteriores, a resposta ao estado nulo y é a resposta do sistema a entrada x
quando o sistema está no estado nulo. O procedimento que iremos adotar para calcular esta resposta do sistema é
baseada na reformulação da entrada arbitrária x(n) como uma soma de componentes de impulso unitário.
A ideia principal para visualizar como o impulso unitário de tempo discreto pode ser usado para construir sinais
de tempo discreto é pensar que sinais de tempo discreto são uma sequência de impulsos. Por exemplo, note que
x(−1), n = −1,
x(−1)δ(n + 1) =
0,
n 6= −1,
x(0), n = 0,
x(0)δ(n) =
0,
n 6= 0,
x(1), n = 1,
x(1)δ(n − 1)
0,
n 6= 1,
Seguindo este raciocı́nio, podemos escrever
x(n) = · · · + x(−3)δ(n + 3) + x(−2)δ(n + 2) + x(−1)δ(n + 1) + x(0)δ(n) + x(1)δ(n − 1) + . . .
(3.17)
Para qualquer valor de n, somente um dos termos do lado direito de (3.17) é não nulo e a amplitude de x para
qualquer valor de n será x(n). Escrevendo essa expressão de forma mais compacta temos
∞
X
x(n) =
x(k)δ(n − k).
(3.18)
k=−∞
Essa expressão corresponde a representação de uma sequência arbitrária como uma combinação linear de impulsos
unitários deslocados, onde as ponderações da combinação linear são x(k).
Exemplo 3.9. Considere x(n) = u(n), na qual u(n) é o degrau unitário. Neste caso, como u(n) = 0 para n < 0 e
u(n) = 1 para n ≥ 0, então
x(n) =
∞
X
δ(n − k).
k=0
A equação (3.18) é chamada de propriedade da “peneira” do impulso unitário de tempo discreto. Como a
sequência δ(n − k) é não nula somente quando k = n, a soma do lado direito de (3.18) é “peneirada” através da
sequência de valores x(k) e preserva somente o valor correspondente a k = n.
Somatório de convolução para representar a resposta de estado nulo
Através de (3.17)-(3.18) podemos representar x como uma superposição de impulsos unitários deslocados, δ(n−k),
na qual é não nulo em um único ponto no tempo. A resposta de um sistema linear para x será a superposição de
respostas escalonadas do sistema para cada um desses impulsos deslocados.
Mais especificamente, considere a resposta de um sistema linear para uma entrada arbitrária x. Podemos
representar a entrada através de (3.18) como uma combinação de impulsos unitários deslocados. Seja hk (n) a
resposta do sistema linear para o impulso unitário deslocado, δ(n − k). Então, da propriedade da superposição de
sistemas lineares, a resposta y(n) do sistema linear para a entrada x em (3.18) é simplesmente a combinação linear
ponderada dessas respostas elementares. Isto é, com a entrada x representada através de (3.18), a saı́da y pode ser
expressada como
y(n) =
∞
X
x(k)hk (n).
(3.19)
k=−∞
De acordo com (3.19), se sabemos a resposta de um sistema linear para um conjunto de impulsos unitários
deslocados, podemos construir a resposta para uma entrada arbitrária.
Note que para sistemas lineares e invariantes no tempo as respostas para os impulsos unitários deslocados no
tempo serão apenas versões deslocadas de si mesmos. Especificamente, como δ(n − k) é uma versão deslocada de
δ(n), a resposta hk (n) é uma versão deslocada no tempo de h0 (n), isto é,
hk (n) = h0 (n − k).
Por conveniência de notação, iremos desconsiderar o subscrito em h0 (n) e definir a resposta ao impulso unitário
como h(n) = h0 (n).
3.1 Sistemas lineares discretos e invariantes no tempo
31
Então, para um sistema discreto linear e invariante no tempo a equação (3.19) torna-se
y(n) =
∞
X
x(k)h(n − k).
(3.20)
k=−∞
Esta equação é conhecida como somatório de convolução e a operação no lado direito de (3.20) é conhecida
como convolução das sequências x e h. Iremos representar a operação de convolução simbolicamente como
y(n) = x(n) ∗ h(n).
Propriedades do somatório de convolução
Nas seções anteriores desenvolvemos representações importantes para sistemas lineares invariantes no tempo no
domı́nio do tempo discreto em função de suas respostas ao impulso. Agora, verificaremos algumas propriedades do
somatório de convolução.
Sejam x1 , x2 e x3 sinais de tempo discreto. Então, as seguintes propriedades são válidas:
Comutatividade. Uma propriedade da convolução é a comutatividade. Isto é,
x1 (n) ∗ x2 (n) = x2 (n) ∗ x1 (n) =
∞
X
x2 (k)x1 (n − k).
k=−∞
Distributividade. A convolução é distributiva sobre a adição. Logo,
x1 (n) ∗ (x2 (n) + x3 (n)) = x1 (n) ∗ x2 (n) + x1 (n) ∗ h3 (n).
Associatividade. Temos que
x1 (n) ∗ (x2 (n) ∗ x3 (n)) = (x1 (n) ∗ x2 (n)) ∗ x3 (n).
Deslocamento. Se
x1 (n) ∗ x2 (n) = c(n).
Então,
x1 (n − m) ∗ x2 (n − p) = c(n − m − p).
Propriedade do comprimento. Se x1 e x2 possuem comprimento L1 e L2 , respectivamente, então o comprimento
de x1 (n) ∗ x2 (n) é L1 + L2 − 1.
A demonstração de todas as propriedades acima segue diretamente da definição (3.20) e são deixadas como
exercı́cio para o leitor.
Causalidade e resposta de estado nulo
Em (3.20), consideramos apenas que o sistema é linear e invariante no tempo. Não existem outras restrições no
sinal de entrada e no sistema. Entretanto, nas aplicações da engenharia, quase todos os sinais de entrada são causais
e a maioria dos sistemas também é causal. Estas restrições simplificam os limites do somatório de convolução dado
em (3.20).
Conforme definido anteriormente, a saı́da de um sistema causal depende somente dos valores de entrada no
instante de tempo presente e passado. Usando o somatório de convolução, podemos relacionar essa propriedade com
a resposta ao impulso do sistema. Especificamente, para que um sistema linear, discreto e invariante no tempo seja
causal, a saı́da y(n) não deve depender de x(k) para k > n. A partir de (3.20), podemos ver que isso será verdade
se todos os coeficientes h(n − k) que multiplicam valores de x(k) para k > n devem ser zero. Isto então requer que
a resposta ao impulso de um sistema linear, discreto e invariante no tempo satisfaça
h(n) = 0,
para n < 0.
(3.21)
De acordo com esta expressão, a resposta ao impulso de um sistema linear e invariante no tempo deve ser zero
antes que o impulso ocorra, o que é consistente com o conceito intuitivo de causabilidade.
Similarmente, se a entrada x(n) é causal, então x(n) = 0 para n < 0.
Se x(n) e o sistema forem causais, o produto x(m)h(n − m) = 0 quando m < 0 e para m > n. Este produto é
não nulo apenas para a faixa 0 ≤ m ≤ n. Neste caso (3.20) é reduzida para
y(n) =
n
X
m=0
x(m)h(n − m).
(3.22)
32
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
Exemplo 3.10. Determine x(n) ∗ g(n) para x(n) = (0.8)n u(n) e g(n) = (0.3)n u(n).
Partindo da definição do somatório de convolução, temos
x(n) ∗ g(n) =
∞
X
x(k)g(n − k).
k=−∞
Note que x(n) e g(n) são causais. Logo,
x(n) ∗ g(n) =
n
X
x(k)g(n − k) =
k=0
n
X
(0.8)k u(k)(0.3)n−k u(n − k).
k=0
Neste somatório, k está contido no intervalo entre 0 e n, ou seja 0 ≤ k ≤ n. Portanto, se n ≥ 0, então tanto k
quanto n − k ≥ 0, tal que u(k) = u(n − k) = 1. Se n ≤ 0, então k é negativo, pois k está entre 0 e n, e u(k) = 0.
Logo, a equação acima se torna
Pn
k
n−k
, se n ≥ 0,
k=0 (0.8) (0.3)
x(n) ∗ g(n) =
0,
se n < 0.
Esta expressão pode ser reescrita como
x(n) ∗ g(n) = (0.3)n
m
n X
0.8
k=0
0.3
u(n).
Note que esta última expressão representa uma progressão geométrica com taxa 0.8/0.3. Logo,
x(n) ∗ g(n) = (0.3)n
(0.8)n+1 − (0.3)n+1
u(n) = 2 (0.8)n+1 − (0.3)n+1 u(n).
n
(0.3) (0.8 − 0.3)
Exemplo 3.11. Determine a resposta de estado nulo de um sistema descrito pela equação
y(n + 2) − 0.6y(n + 1) − 0.16y(n) = 5x(n + 2),
se a entrada for x(n) = 4−n u(n).
A entrada pode ser reescrita como x(n) = 4−n u(n) =
sistema já foi obtida nos exemplos anteriores:
1 n
4
u(n) = (0.25)n u(n). A resposta ao impulso deste
h(n) = [(−0.2)n + 4(0.8)n ] u(n)
Portanto,
y(n) = x(n) ∗ h(n) = (0.25)n u(n) ∗ [(−0.2)n u(n) + 4(0.8)n u(n)]
= (0.25)n u(n) ∗ (−0.2)n u(n) + (0.25)n u(n) ∗ 4(0.8)n u(n).
Usando o exercı́cio 4-(d), temos
(0.25)n+1 − (−0.2)n+1
(0.25)n+1 − (0.8)n+1
y(n) =
+4
u(n),
0.25 − (−0.2)
0.25 − 0.8
= −5.05(0.25)n+1 − 2.22(−0.2)n+1 + 7.27(0.8)n+1 u(n),
= (−1.26(0.25)n + 0.44(−0.2)n + 5.81(0.8)n ) u(n).
Exercı́cios
1. Seja x(n) = δ(n) + 2δ(n − 1) − δ(n − 3), e h(n) = 2δ(n + 1) − 2δ(n − 1). Rascunhe e calcule as seguintes convoluções:
a) y1 (n) = x(n) ∗ h(n).
b) y2 (n) = x(n + 2) ∗ y(n).
c) y3 (n) = x(n) ∗ h(n + 2).
2. Considere o sinal
h(n) =
n−1
1
[u(n + 3) − u(n − 10)] .
2
3.1 Sistemas lineares discretos e invariantes no tempo
33
Expresse A e B em termos de n para que a seguinte equação seja válida:
h(n − k) =
1 n−k−1
2
A ≤ k ≤ B,
caso contrário.
,
0,
3. Calcule e trace o gráfico da convolução y(n) = x(n) ∗ h(n), na qual
−n
1
x(n) =
u(−n − 1),
3
h(n) = u(n − 1).
e
4. (tabela das principais convoluções de sinais em tempo discreto) Mostre as seguintes convoluções:
a) se x1 (n) = δ(n − k), x2 = x(n), então x1 (n) ∗ x2 =x(n − k).
b) se x1 (n) = γ n u(n), x2 = u(n), então x1 (n) ∗ x2 =
1−γ n+1
1−γ
u(n).
c) se x1 (n) = u(n), x2 = u(n), então x1 (n) ∗ x2 = (n + 1)u(n).
γ1n+1 −γ2n+1
u(n), para γ1 6= γ2 .
γ1 −γ2
n(n+1)
e) se x1 (n) = u(n), x2 = nu(n), então x1 (n) ∗ x2 =
u(n).
2 n
γ(γ −1)+n(1−γ)
n
f) se x1 (n) = γ u(n), x2 = nu(n), então x1 (n) ∗ x2 =
u(n).
(1−γ)2
1
g) se x1 (n) = nu(n), x2 = nu(n), então x1 (n) ∗ x2 = 6 n(n − 1)(n + 1)u(n).
h) se x1 (n) = γ n u(n), x2 = γ n u(n), então x1 (n) ∗ x2 = (n + 1)γ nu(n).
γ1 −γ2
n
n
n
1 γ2
γ
−
γ
+
nγ
i) se x1 (n) = nγ1n u(n), x2 = γ2n u(n), então x1 (n) ∗ x2 = (γ1γ−γ
2
2
1
1 u(n)
γ2
2)
d) se x1 (n) = γ1n u(n), x2 = γ2n u(n), então x1 (n) ∗ x2 =
para γ1 6= γ2 .
Estabilidade
Sistemas são projetados para desempenhar algumas tarefas ou para processar sinais. Se um sistema não é estável,
ele pode queimar, desintegrar, ou saturar quando um sinal, não importa o quão pequeno, é aplicado. Portanto,
um sistema instável não possui interesses práticos e a estabilidade é uma propriedade básica requerida para as
aplicações.
Neste curso, iremos estudar dois tipos de estabilidade: interna e externa. Se cada entrada limitada aplicada em
um sistema resultar em uma saı́da limitada, o sistema é dito externamente estável. Este tipo de estabilidade também
é conhecida como estabilidade no sentido BIBO (do inglês bounded-input/bounded-output). Já a estabilidade interna
é mais genérica e é determinada aplicando condições iniciais não nulas e nenhuma entrada externa.
Nas próximas seções estudaremos estas definições com mais detalhes.
Estabilidade BIBO
Considere um sistema linear invariante no tempo descrito por
y(n) = h(n) ∗ u(n),
(3.23)
na qual h é a resposta ao impulso e u é o sinal (entrada) aplicada no sistema.
Definição 3.1. Dizemos que u é limitada se u(n) não cresce infinitamente, ou seja, existe M ≥ 0 tal que
|u(n)| ≤ M < ∞,
para todo n ≥ 0.
Definição 3.2. Um sistema é dito BIBO (do inglês bounded-input bounded-output) estável se para toda entrada
limitada temos uma saı́da limitada. Esta estabilidade é definida para a resposta de estado zero e é aplicável somente
se o sistema possui condições iniciais nulas.
Note que
y(n) = h(n) ∗ x(n) =
∞
X
h(m)x(n − m).
m=−∞
Logo,
|y(n)| =
∞
X
m=−∞
h(m)x(n − m) ≤
∞
X
m=−∞
|h(m)||x(n − m)|
34
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
Se x é limitada, então existe k1 ∈ R+ tal que |x(n)| < k1 para todo n, e
|y(n)| ≤ k1
∞
X
|h(m)|.
m=−∞
Obviamente a saı́da será limitada se a série (somatório) no lado direito é limitada, isto é, se existe k2 ∈ R+ tal que
∞
X
|h(m)| < k2 .
m=−∞
Estabilidade Interna
Para sistemas lineares, discretos e invariantes no tempo a estabilidade interna é definida em termos da resposta
do sistema para entrada zero. Quando o sistema é especificado por uma equação a diferença na forma (3.5), a
resposta de entrada zero consiste dos modos caracterı́sticos do sistema. Os modos caracterı́sticos correspondente a
raiz caracterı́stica γ é γ n . Para ser mais geral, seja γ complexo, então γ = |γ|ejβ e γ n = |γ|ejβn .
Como a magnitude de ejβn é sempre unitária, independente do valor de n, então a magnitude de γ n é |γ|n .
Portanto,
Se |γ| < 1,
γ n → 0,
Se |γ| > 1,
γ n → ∞,
Se |γ| = 1,
n
γ = 2,
quando n → ∞
quando n → ∞
para todo n.
Definição 3.3. A reposta a entrada zero de um sistema LDIT é marginalmente estável se toda condição inicial
excitar uma resposta limitada. É assintoticamente estável se toda condição inicial excitar uma resposta limitada que
tende a zero quando n → ∞.
A Figura 3.1 mostra os modos caracterı́sticos correspondentes às raı́zes caracterı́sticas em varias localizações do
plano complexo.
Note que se as raı́zes caracterı́sticas do sistema estão dentro do circulo unitário, ou seja |γi | < 1, para todo i,
então o sistema é assintoticamente estável. Por outro lado, se uma raiz caracterı́stica está fora do circulo unitário,
o sistema é instável. Se nenhuma raiz caracterı́stica está fora do circulo unitário, mas alguma raiz simples (de
multiplicidade 1) está sobre o circulo, então o sistema é marginalmente estável. Se há raı́zes de multiplicidade maior
que 1 sobre o circulo, então o sistema será instável. Resumindo:
• Um sistema linear, discreto e invariante no tempo é assintoticamente estável se e somente se todas as raı́zes
caracterı́sticas estão dentro do circulo unitário centrado em zero. Estas raı́zes podem qualquer multiplicidade.
• Um sistema linear, discreto e invariante no tempo é instável se e somente se uma ou mais das seguintes
condições é satisfeita: (i) ao menos uma raiz fora do circulo unitário centrado na origem; (ii) há raı́zes de
multiplicidade maior que 1 sobre o cı́rculo unitário.
• Um sistema linear, discreto e invariante no tempo é marginalmente estável se e somente se não há raı́zes fora
do circulo unitário e há raı́zes de multiplicidade 1 sobre o cı́rculo.
3.1 Sistemas lineares discretos e invariantes no tempo
35
Figura 3.1: Localização das raı́zes caracterı́sticas e os modos caracterı́sticos correspondentes no plano complexo.
36
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
3.2
Sistemas lineares contı́nuos e invariantes no tempo
De maneira análoga aos resultados derivados e discutidos nas seções anteriores, nosso objetivo nesta seção é obter
uma caracterização de sistemas lineares contı́nuos e invariantes no tempo.
3.2.1
Equações diferenciais lineares com coeficientes constantes
Neste curso estaremos considerando sistemas lineares diferenciais. Neste caso, a entrada x e a saı́da y estão
relacionadas por equações diferenciais lineares na forma
dN −1 y
dy
dM −1 x
dx
dN y
dM x
(t) + a1 N −1 (t) + · · · + aN −1 (t) + aN y(t) = bN −M M (t) + bN −M +1 M −1 + · · · + bN −1 (t) + bN x(t),
N
dt
dt
dt
dt
dt
dt
na qual todos os coeficientes ai e bi são constantes. A equação acima pode ser reescrita na seguinte forma:
(DN + a1 DN −1 + · · · + aN −1 D + aN )y(t) = (bN −M DM + bN −M +1 DM −1 + · · · + bN −1 D + bN )x(t),
na qual D = d/dt, ou ainda
Q(D)y(t) = P (D)x(t),
(3.24)
com
Q(D) = DN + a1 DN −1 + · · · + aN −1 D + aN
P (D) = bN −M DM + bN −M +1 DM −1 + · · · + bN −1 D + bN .
Esta equação é linear. Portanto, sua resposta pode ser expressa como a soma de duas componentes: a componente
de entrada nula e a componente de estado nulo. De maneira similar ao caso de sistemas LDIT, iremos desenvolver
um método para calcular ambas as componentes da resposta do sistema.
Resposta do sistema a condições internas: Resposta de entrada nula
A resposta de entrada nula y0 é a solução de (3.24) quando a entrada x(t) = 0, tal que
Q(D)y0 (t) = 0.
(3.25)
A solução desta equação pode ser obtida sistematicamente. Note que (3.25) mostra que a combinação linear de
y0 e suas N derivadas é zero para todo t. Tal resultado é possı́vel se e somente se y0 (t) e todas as N derivadas
forem da mesma forma, caso contrário, a soma não será zero para todos os valores de t. A função exponencial eλt é
a única função que possui esta propriedade. Assim,
y0 (t) = ceλt ,
Dy0 (t) = cλeλt ,
D2 y0 (t) = cλ2 eλt ,
..
.
DN y0 (t) = cλN eλt .
Substituindo esses resultados em (3.25), obtemos
c λN + a1 λN −1 + · · · + aN −1 λ + aN eλt = 0.
Para uma solução não trivial devemos ter
λN + a1 λN −1 + · · · + aN −1 λ + aN .
Isto mostra que, de fato, ceλt é a solução de (3.25). Note que o polinômio da equação acima é idêntico ao
polinômio Q(D) com λ substituindo D. Portanto, a expressão acima pode ser escrita como Q(λ) = 0. Além disso,
Q(λ) pode ser representada por
Q(λ) = (λ − λ1 )(λ − λ2 ) . . . (λ − λN ) = 0.
O polinômio Q(λ) = 0 possui N soluções, λ1 , λ2 , . . . , λN (assumindo que todos os λi são distintos). Consequentemente, (3.25) possui N possı́veis soluções: c1 eλ1 t , c2 eλ2 t , . . . , cN eλN t . Logo, a solução genérica de (3.25) é dada
por
y0 (t) = c1 eλ1 t + c2 eλ2 t + · · · + cN eλN t .
(3.26)
3.2 Sistemas lineares contı́nuos e invariantes no tempo
37
Observação 3.1. O polinômio Q(λ) não depende da entrada aplicada no sistema. Ele é uma caracterı́stica do sistema.
Por esta razão, o polinômio Q(λ) é chamado de polinômio caracterı́stico do sistema. A equação Q(λ) = 0 é chamada
de equação caracterı́stica do sistema.
Raı́zes repetidas
A solução de (3.25) dada por (3.26) só é válida quando as N raı́zes caracterı́sticas são distintas. Se existem
raı́zes repetidas, a forma da solução tem que ser modificada. Considere, por exemplo, a seguinte equação:
(D − λ)2 y0 (t) = 0.
Neste caso, λ é repetida duas vezes. Note que y0 (t) = (c1 + tc2 )eλt é a solução desta equação diferencial e que
os modos caracterı́sticos associados a esta raiz repetida são eλt e teλt . Seguindo este padrão, é possı́vel mostrar que
os modos caracterı́sticos da equação
(D − λ)r y0 (t) = 0,
são eλt , teλt , t2 eλt , . . . , tr−1 eλt . Além disso, a solução desta equação diferencial é
y0 (t) = (c1 + tc2 + · · · + tr−1 cr )eλt .
Portanto, para um sistema que possui polinômio caracterı́stico
Q(λ) = (λ − λ1 )r (λ − λr+1 ) . . . (λ − λN ),
os modos caracterı́sticos são eλ1 t , teλ1 t , . . . , tr−1 eλ1 t , eλr+1 t , . . . , eλN t e a solução é
y0 (t) = (c1 + tc2 + · · · + cr tr−1 )eλ1 t + cr+1 eλr+1 t + · · · + cN eλN t .
Raı́zes complexas
Para lidar com raı́zes complexas, utilizaremos um procedimento similar ao caso de raı́zes repetidas. Quando
há raı́zes complexas, o procedimento resultada em modos caracterı́sticos complexos. Entretanto, pode-se evitar o
resultado da forma complexa utilizando o seguinte procedimento.
É importante enfatizar que para sistemas reais, raı́zes complexas sempre aparecerão em pares complexo conjugados, pois os coeficientes do polinômio caracterı́stico são números reais. Portanto, se α + βj é uma raiz caracterı́stica,
então α − βj também será. A parcela da solução do sistema que corresponderá a esse par de raı́zes complexo
conjugadas é
y0 (t) = c1 e(α+βj)t + c2 e(α−βj)t .
Como devemos ter que y0 seja um valor representado por um número real (pois estamos tratando sistemas reais),
então c1 e c2 devem ser
c1 =
c jθ
e ,
2
e,
c2 =
c −jθ
e .
2
Isto resulta em
y0 (t) = c1 e(α+βj)t + c2 e(α−βj)t = y0 (t) =
c jθ (α+βj)t c −jθ (α−βj)t
e e
+ e e
=
2
2
c αt j(βt+θ)
e
e
+ e−j(βt+θ) = ceαt cos(βt + θ).
2
Condições iniciais
N −1
Para garantir a unicidade da solução de (3.25), as condições iniciais y0 (0), . . . , ddtN −1y0 (0) devem ser fornecidas.
As condições imediatamente antes de t = 0 são as condições para t = 0− , e as imediatamente após t = 0 são as
condições para t = 0+ .
A resposta total y(t) é constituı́da de duas componentes: a componente de entrada nula e a componente de
estado nulo. Para t = 0− , a resposta total y consiste apenas da componente de entrada nula y0 , pois a entrada
ainda não foi aplicada. Logo, as condições iniciais para y são idênticas àquelas para y0 . Além disso, y0 é a resposta
devido apenas às condições iniciais e não depende da entrada x, logo, a aplicação da entrada em t = 0 não possui
efeito em y0 .
38
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
Resposta do sistema à entrada externa: Resposta de estado zero
Resposta ao impulso
Nesta seção iremos discutir como obter h, a resposta ao impulso, para os casos em que o sistema é descrito por
(3.24). Note que sinal h descreve a resposta do sistema para uma entrada x(t) = δ(t) aplicada em t = 0 com todas
as condições iniciais zero para t = 0− . Portanto, a resposta ao impulso deve constituir os modos caracterı́sticos para
t ≥ 0+ . Como resultado,
h(t) = termos dos modos caracterı́sticos t ≥ 0+ .
Essa resposta é válida para t > 0. No único momento t = 0, só pode haver um impulso, de forma que a resposta
completa h(t) é
h(t) = A0 δ(t) + termos dos modos caracterı́sticos t ≥ 0.
(3.27)
na qual A0 é um número real.
Observação 3.2. Note que derivadas de δ não podem aparecer na resposta ao impulso do sistema. De fato, considere
que M ≤ N , e que a resposta ao impulso do sistema possui derivadas de δ. Então, substituindo x(t) = δ(t) e
y(t) = h(t) em (3.24), devemos ter que os dois lados da igualdade devem ser satisfeitos. Portanto, se h contém
dδ
dN +1 δ
dt (t), então o lado esquerdo de (3.24) irá conter um termo dtN +1 (t). Mas a derivada de maior ordem de δ no lado
N
direito de (3.24) será ddtNδ (t) e a igualdade de (3.24) não será satisfeita. Argumentos similares podem ser usados
para mostrar que derivadas de ordem maior de δ também não podem aparecer na expressão de h.
Para determinar os termos dos modos caracterı́sticos de (3.27), iremos considerar um sistema S0 na qual a saı́da
w(t) e a entrada x(t) estão relacionadas por
Q(D)w(t) = x(t).
Este sistema possui o mesmo polinômio caracterı́stico de (3.24). Além disso, eles podem ser considerados se
P (D) = 1 em (3.24), isto é, b0 = 0. Portanto, de acordo com (3.27), a resposta ao impulso do sistema S0 consiste
dos termos dos modos caracterı́sticos sem um impulso em t = 0. Iremos denotar esta resposta ao impulso de S0 por
yn . Observe que yn consiste dos modos caracterı́sticos de (3.24) e portanto pode ser visualizada como uma resposta
a entrada zero de (3.24). Agora, yn é a resposta ao impulso de S0 . Portanto,
Q(D)yn (t) = δ(t),
ou ainda
(DN + a1 DN −1 + · · · + aN −1 D + aN )yn (t) = δ(t),
que é equivalente a
dN y
dN −1 y
dy
(t) + a1 N −1 (t) + · · · + aN −1 (t) + aN yN (t) = δ(t).
N
dt
dt
dt
Note que o lado direito contém somente um termo δ. Isso é possı́vel se somente
do tipo pulo em t = 0, assim
dN y
(t)
dtN
dN −1 y
dtN −1
possuir uma descontinuidade
= δ(t). Além disso, os termos de ordem menor não podem possuir descontinuida-
des do tipo pulo porque isso resultaria na presença de derivadas de δ(t). Portanto, yn (0) dy
dt (0) = · · · =
e as condições iniciais em yn são
dN −2 y
(0)
dtN −2
= 0,
dN −1 y
(0) = 1,
dtN −1
dy
dN −2 y
yn (0) =
(0) = · · · = N −2 (0) = 0.
dt
dt
Isso é equivalente a dizer que yn é a resposta a entrada nula do sistema (3.24) sujeito as condições iniciais acima.
Agora iremos mostrar que para a mesma entrada x(t) em ambos os sistemas, S0 e o sistema em (3.24), suas
saı́das w(t) e y, respectivamente, são relacionadas por
y(t) = P (D)w(t).
De fato, note que
Q(D)w(t) = x(t) ⇔ Q(D)P (D)w(t) = P (D)x(t) ⇔ Q(D)P (D)w(t) = Q(D)y(t) ⇔ y(t) = P (D)w(t).
3.2 Sistemas lineares contı́nuos e invariantes no tempo
39
Logo, se x(t) = δ(t) então a saı́da de S0 é yn e a saı́da de (3.24) é P (D)yn (t). Essa saı́da é definida como h(t),
a resposta ao impulso de (3.24). Note, entretanto, que como ela representa a resposta ao impulso de um sistema
causal S0 , a função yn é causal. Para incorporar este faco devemos representar esta função como yn (t)u(t). Portanto,
segue que h(t) é
h(t) = P (D) [yn (t)u(t)] .
O lado direito desta expressão é uma combinação linear das derivadas de yn (t)u(t). Calcular estas derivadas
é inconveniente por causa da presença de u(t). As derivadas irão gerar um impulso e suas derivadas na origem.
Felizmente, quando M ≤ N , podemos evitar esta dificuldade usando o fato de que para t = 0, h(t) = b0 δ(t).
Portanto, não precisamos nos preocupar em encontrar h(t) na origem. Esta simplificação implica que ao invés de
derivar P (D)[yn (t)u(t)], precisamos derivar P (D)yn (t) e adicionar o termo b0 δ(t). Assim,
h(t) = b0 δ(t) + P (D)[yn (t)u(t)] = b0 δ(t) + P (D)yn (t).
Observação 3.3. A expressão acima é valida quando M ≤ N . Quando M > N , temos que utilizar a expressão
h(t) = P (D)[yn (t)u(t)].
Exemplo 3.12. Encontre a resposta ao impulso para um sistema especificado por
(D2 + 5D + 6)y(t) = Dy(t).
(3.28)
O polinômio caracterı́stico desse sistema é (λ2 + 3λ + 2) = (λ + 1)(λ + 2).
As raı́zes caracterı́sticas são λ = −1 e λ = −2. Portanto,
yn (t) = c1 e−t + c2 e−2t .
Calculando a derivada desta expressão, temos
dyn (t)
= −c1 e−t − 2c2 e−2t .
dt
Assuma que
dy
dt (0)
= 1 e yn (0) = 0. Então, obtemos que c1 = −1 e c2 = −1. Portanto,
yn (t) = e−t − e−2t .
De acordo com resultados anteriores, h(t) = [P (D)yn (t)]u(t) = [Dyn (t)]u(t) =
h
dyn
dt
i
u(t) = [−e−t + e−2t ]u(t).
Exercı́cios
1. Encontre a resposta de entrada nula dos seguintes sistemas:
a) (D2 + 5D + 6)y(t) = (D + 1)x(t), y(0) = 2, Dy(0) = −1.
b) (D2 + 4D + 4)y(t) = Dx(t), y(0) = 3, Dy(0) = −4.
c) D(D + 1)y(t) = (D + 2)x(t), y(0) = 0, Dy(0) = 1.
d) (D2 + 4D + 13)y(t) = 4(D + 2)x(t), y(0) = 5, Dy(0) = 15.98.
e) D2 (D + 1)y(t) = (D2 + 2)x(t), y(0) = 4, Dy(0) = 3, D2 y(0) = 5.
2. Um sistema descrito por uma equação diferencial linear com coeficientes constantes possui resposta a entrada
nula y(t) = 2e−t + 3.
a) É possı́vel que a equação caracterı́stica do sistema seja λ + 1 = 0?
√
b) É possı́vel que a equação caracterı́stica do sistema seja 3(λ2 + λ) = 0?
c) É possı́vel que a equação caracterı́stica do sistema seja λ(λ + 1)2 = 0?
3. Encontre a resposta ao impulso dos seguintes sistemas:
a) (D2 + 4D + 3)y(t) = (D + 5)x(t).
b) (D2 + 5D + 6) = (D2 + 7D + 11)x(t).
c) (D + 1)y(t) = −(D − 1)x(t).
d) (D2 + 6D + 9)y(t) = (2D + 9)x(t).
A resposta de estado nulo
40
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
Considere a aproximação x̂(t) constante por partes do sinal contı́nuo no tempo x(t). Esta aproximação pode ser
expressada como uma combinação linear de pulsos atrasados. De fato, se definirmos
1
∆ , 0 ≤ t < ∆,
δ∆ =
0, caso contrário,
então, como ∆δ∆ (t) possui amplitude unitária, temos que
x̂(t) =
∞
X
x(k∆)δ∆ (t − k∆)∆.
(3.29)
k=−∞
Note que para qualquer valor de t somente um termo do lado direito de (3.29) é não nulo.
Tomando ∆ → 0, temos que
∞
X
x(t) = lim
∆→0
Z
∞
x(k∆)δ∆ (t − k∆)∆ =
x(τ )δ(t − τ )dτ.
−∞
k=−∞
Integral de convolução para representar a resposta de estado nulo
Como no caso de tempo discreto, a representação desenvolvida na seção anterior fornece uma maneira de
visualizar sinais de tempo contı́nuo como a superposição de pulsos deslocados. Em particular, a aproximação (3.29)
representa o sinal x̂ como uma soma de sinais δ∆ deslocados. Consequentemente, a resposta ŷ de um sistema linear
para este sinal será a superposição de respostas para δ∆ . Especificamente, defina hk∆ (t) como a resposta de um
sistema para a entrada δ∆ (t − k∆). Então, de (3.29) e da propriedade de superposição, temos que
ŷ(t) =
∞
X
x(k∆)ĥk∆ (t)∆.
(3.30)
k=−∞
Portanto,
Z
∞
y(t) =
Z
∞
x(τ )δ(t − τ )dτ.
x(τ )hτ dτ =
−∞
(3.31)
−∞
A expressão (3.31) é conhecida como integral de convolução. De forma análoga ao caso de tempo discreto, iremos
representar esta operação por
y(t) = x(t) ∗ h(t).
Propriedades da integral de convolução
Assim como o somatório de convolução dos sistemas LDIT, a integral de convolução também possui algumas
propriedades importantes. Nesta seção iremos apresentá-las.
Sejam x1 , x2 e x3 sinais de tempo contı́nuo. Então, valem as seguintes propriedades.
Comutatividade.
Z ∞
x1 (t) ∗ x2 (t) = x2 (t) ∗ x1 (t) =
x2 (τ )x1 (t − τ )dτ.
−∞
Distributividade. A convolução é distributiva sobre a adição. Logo,
x1 (t) ∗ (x2 (t) + x3 (t)) = x1 (t) ∗ x2 (t) + x1 (t) ∗ x3 (t).
Associatividade.
x1 (t) ∗ (x2 (t) ∗ x3 (t)) = (x1 (t) ∗ x2 (t)) ∗ x3 (t).
Deslocamento. Se
x1 (t) ∗ x2 (t) = c(t).
Então, para qualquer T , T1 e T2 real vale que
x1 (t) ∗ x2 (t − T ) = x1 (t − T ) ∗ x2 (t) = c(t − T ),
3.2 Sistemas lineares contı́nuos e invariantes no tempo
41
e
x1 (t − T1 ) ∗ x2 (t − T2 ) = c(t − T1 − T2 ).
As demonstrações dessas propriedades podem ser feitas facilmente a partir da definição (3.31) e são deixadas
como exercı́cio para o leitor.
Causalidade e resposta de estado nulo
De maneira análoga ao caso discreto, um sistema LCIT é causal se
h(t) = 0,
para t < 0,
e neste caso a integral de convolução é
Z
t
t
Z
x(τ )h(t − τ )dτ =
y(t) =
h(τ )x(t − τ )dτ.
0
0
Exercı́cios
1. Determine a convolução dos seguintes sinais:
t + 1, 0 ≤ t ≤ 1,
2 − t, 1 < t ≤ 2,
x(t) =
0,
caso contrário.
h(t) = δ(t + 2) + 2δ(t + 1).
2. Suponha que
x(t) = u(t − 3) − u(t − 5),
h(t) = e−3t u(t).
a) Calcule y(t) = x(t) ∗ h(t).
b) Calcule g(t) = dx
dt ∗ h(t).
c) Como g é relacionado com y?
3. Seja
y(t) = e−t u(t) ∗
∞
X
δ(t − 3k).
k=−∞
Mostre que y(t) = Ae−t para 0 ≤ t < 3 e determine o valor de A.
4. Para cada um dos seguintes sinais, use a integral de convolução para encontrar a resposta de y(t) para o sistema
linear, contı́nuo e invariante no tempo que possui resposta ao impulso h e entrada x:
a) x(t) = e−αt u(t), h(t) = e−βt u(t), para α 6= β.
b) x(t) = u(t) − 2u(t − 2) + u(t − 5), h(t) = e2t u(1 − t).
5. (Tabela de integrais de convolução) Mostre que as seguintes integrais de convolução valem:
a) Se x1 (t) = x(t), x2 (t) = δ(t − T ), então x1 (t) ∗ x2 (t) = x(t − T ).
λt
b) Se x1 (t) = eλt u(t), x2 (t) = u(t), então x1 (t) ∗ x2 (t) = 1−e
−λ u(t).
c) Se x1 (t) = u(t), x2 (t) = u(t), então x1 (t) ∗ x2 (t) = tu(t).
λ1 t
λ2 t
d) Se x1 (t) = eλ1 t u(t), x2 (t) = eλ2 t u(t), então x1 (t) ∗ x2 (t) = e λ1 −e
−λ2 u(t), para λ1 6= λ2 .
e) Se x1 (t) = eλt u(t), x2 (t) = eλt u(t), então x1 (t) ∗ x2 (t) = teλt u(t).
f) Se x1 (t) = teλt u(t), x2 (t) = eλt u(t), então x1 (t) ∗ x2 (t) = 21 t2 eλt u(t).
PN
!eλt
!tN −k
g) Se x1 (t) = tN u(t), x2 (t) = eλt u(t), então x1 (t) ∗ x2 (t) = N
u(t) − k=0 N
(N −k)! u(t).
λN +1
!N !
M +N +1
g) Se x1 (t) = tM u(t), x2 (t) = tN u(t), então x1 (t) ∗ x2 (t) = (N M
u(t).
+M +1)! t
eλ2 t −eλ1 t +(λ1 −λ2 )teλ1 t
u(t).
(λ1 −λ2 )2
cos(θ−φ)eλt −e−αt cos(βt+θ−φ)
√
x1 (t) ∗ x2 (t) =
u(t),
(α+λ)2 +β 2
h) Se x1 (t) = teλ1 t u(t), x2 (t) = eλ2 t u(t), então x1 (t) ∗ x2 (t) =
i) Se x1 (t) = e−αt cos(βt + θ)u(t), x2 (t) = eλt u(t), então
φ = tan−1 (−β/(α + λ)).
com
42
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
6. Considere um sistema linear, contı́nuo e invariante no tempo na qual a entrada e saı́da estão relacionadas pela
seguinte equação diferencial:
dy
(t) + 4y(t) = x(t).
dt
O sistema está em repouso no instante t = 0. Se x(t) = e(−1+3j)t u(t), qual é a saı́da y(t)?
7. Considere um sistema na qual a entrada x e a saı́da y satisfazem a seguinte equação diferencial ordinária de
primeira ordem:
dy
(t) + 2y(t) = x(t).
dt
O sistema está inicialmente em repouso.
a) Determine a saı́da do sistema quando a entrada é x1 (t) = e3t u(t).
b) Determine a saı́da do sistema quando a entrada é x2 (t) = e2t u(t).
c) Determine a saı́da do sistema quando a entrada é x(t) = αe3t u(t) + βe2 tu(t), na qual α e β são números reais.
Mostre que a saı́da será y(t) = αy1 (t) + βy2 (t), na qual y1 e y2 são as saı́das do sistema para o item (a) e (b),
respectivamente.
Estabilidade
Sistemas são projetados para desempenhar algumas tarefas ou para processar sinais. Se um sistema não é estável,
ele pode queimar, desintegrar, ou saturar quando um sinal, não importa o quão pequeno, é aplicado. Portanto,
um sistema instável não possui interesses práticos e a estabilidade é uma propriedade básica requerida para as
aplicações.
A resposta de um sistema linear pode ser sempre decomposta em resposta de estado zero e resposta de entrada
zero. É comum estudar as estabilidades destas duas respostas separadamente.
Estabilidade externa (estabilidade BIBO)
Considere um sistema linear invariante no tempo descrito por
y(t) = (h ∗ u)(t),
na qual h é a resposta ao impulso e u é o sinal (entrada) aplicada no sistema.
Definição 3.4. Dizemos que u é limitada se u(t) não cresce infinitamente, ou seja, existe M ≥ 0 tal que
|u(t)| ≤ M < ∞,
para todo t ≥ 0.
Definição 3.5. Um sistema é dito BIBO (do inglês bounded-input bounded-output) estável se para toda entrada
limitada temos uma saı́da limitada. Esta estabilidade é definida para a resposta de estado zero e é aplicável somente
se o sistema possui condições iniciais nulas.
R∞
Proposição 3.1. Um sistema descrito por (5.9) é bibo estável se e somente se 0 |h(t)|dt ≤ M < ∞, para alguma
constante M .
A partir do resultado acima podemos verificar que se a resposta ao impulso h é absolutamente integrável, então
o sistema é BIBO estável.
Estabilidade interna
A estabilidade BIBO é definida para a resposta de estado zero. Agora iremos estudar a estabilidade para entrada
zero e assumindo condições iniciais diferentes de zero.
Considere um sistema linear invariante no tempo (e entrada nula) descrito por uma equação diferencial da forma
dN y
dn−1 y
+
a
+ · · · + aN y = 0,
1
dtn
dtn−1
y(0) = y0 , y 0 (0) = y1 , . . . , y (n−1) (0)yn−1 .
(3.32)
(3.33)
Definição 3.6. A reposta a entrada zero de (3.33) é marginalmente estável se toda condição inicial excitar uma
resposta limitada. É assintoticamente estável se toda condição inicial excitar uma resposta limitada que tende a zero
quando t → ∞.
3.2 Sistemas lineares contı́nuos e invariantes no tempo
43
Figura 3.2: Localização das raı́zes caracterı́sticas e o modo caracterı́stico correspondente.
Para sistema caracterizados por (3.33), podemos determinar a estabilidade interna em termos da localização
das N raı́zes caracterı́sticas λ1 , . . . , λN do sistema em um plano complexo. Os modos caracterı́sticos são da forma
eλk t ou tr eλk t . Estes modos convergem pra zero quanto t tende ao infinito se Re(λk ) < 0. Por outro lado, os modos
convergem pra infinito quando t tende ao infinito se Re(λk ) > 0. Portanto, um sistema é assintoticamente estável se
todas as raı́zes caracteristicas estão no semi plano esquerdo do plano complexo, isto é, se Re(λk ) < 0 para todo λ.
Se somente uma raiz caracterı́stica está no semi plano direito, o sistema é instável. Modos para raı́zes caracterı́sticas
no eixo imaginário (λ = ±jω0 ) são da forma e±jω0 t . Então, se alguma raiz está no eixo imaginário e todas as
raizes restantes estão no semi plano esquerdo, o sistema é marginalmente estável (assumindo que a raiz no eixo
imaginário possui multiplicidade 1). Se as raı́zes no eixo imaginário são repetidas, os modos caracterı́sticos são da
forma tr e±jωk t , que irá crescer indefinidamente quando t tender a infinito. A Figura 3.2 apresenta a localização dos
modos caracterı́sticos e o modo caracterı́stico correspondente.
Resumindo:
• Um sistema contı́nuo, linear e invariante no tempo é assintoticamente estável se e somente se todas as raı́zes
caracterı́sticas estão localizada no semi plano esquerdo do plano complexo. As raı́zes podem ter qualquer
multiplicidade.
• Um sistema contı́nuo, linear e invariante no tempo é instável se e somente se uma ou ambas as condições
forem satisfeitas: (i) ao menos uma raiz caracterı́stica no semi plano direito; (ii) raı́zes no eixo imaginário
com multiplicidade maior que 1.
• Um sistema contı́nuo, linear e invariante no tempo é marginalmente estável se e somente se não há raı́zes no
semi plano direito e há algumas raı́zes de multiplicidade 1 no eixo imaginário.
Exercı́cios
1. Determine se os sistemas descritos pelas seguintes equações são BIBO estáveis, assintoticamente estáveis, marginalmente estáveis ou instáveis.
a) (D2 + 8D + 12)y(t) = (D − 1)x(t).
b) D(D2 + 3D + 2)y(t) = (D + 5)x(t).
c) D2 (D2 + 2)y(t) = x(t).
d) (D + 1)(D2 − 6D + 5)y(t) = (3D + 1)x(t).
e) (D + 1)(D2 + 2D + 5)2 y(t) = x(t).
f) (D + 1)(D2 + 9)y(t) = (2D + 9)x(t).
g) (D + 1)(D2 + 9)2 y(t) = (2D + 9)x(t).
44
Capı́tulo 3. Análise de sistemas lineares no domı́nio do tempo
h) (D2 + 1)(D2 + 4)(D2 + 9)y(t) = 3Dx(t).
2. Um determinado sistema contı́nuo, linear e invariante no tempo possui resposta ao impulso h(t) = u(t).
Determine as raı́zes caracterı́sticas desse sistema.
b) Este sistema é assintoticamente estável, instável ou marginalmente estável?
c) É BIBO estável?
3. Um sistema possui a resposta ao impulso dada por um pulso retangular, isto é, h(t) = u(t) − u(t − 1). O sistema
é estável?
4. Um sistema contı́nuo, linear e invariante no tempo possui resposta ao impulso h(t) =
sistema é estável?
P∞
i
i=0 (0.5) δ(t
− i). O
45
Capítulo 4
Princípios básicos da transformada de Laplace
A transformada de Laplace é uma ferramenta matemática poderosa para resolução de equações diferenciais ordinárias
e parciais, além de ser útil para análise de sinais. A transformada de Laplace ganhou esse nome em homenagem
ao matemático e astrônomo Pierre-Simon Laplace, que utilizava uma transformada integral semelhante em seus
estudos sobre teoria da Probabilidade. Entretanto, somente após a segunda guerra mundial que a transformada de
Laplace foi difundida. O responsável por ter apresentado as vantagens de utilizar a transformada foi o matemático
Gustav Doetsch.
Quando aplicamos a transformada de Laplace em um sinal ou sistema, geramos uma função de variável complexa a partir de sua representação no tempo. Em geral, isso diminui a complexidade do processo de análise do
comportamento do sinal ou sistema. Neste capı́tulo, estabeleceremos os fundamentos da teoria e as propriedades da
transformada de Laplace.
4.1
Transformada de Laplace
Definição 4.1. Seja s ∈ C. A transformada de Laplace do sinal x, definido para todos os números reais t ≥ 0 é a
função F (s), que é uma transformação unilateral definida por
Z ∞
F (s) =
x(t)e−st dt
(4.1)
0
sempre que o limite existir.
Observação 4.1. Quando a integral em (4.1) diverge, a transformada de Laplace de x não existe.
Observação 4.2. A notação L (x) será usada para denotar a transformada de Laplace de x. Note que L opera na
função x = x(t) e gera uma nova função F (s) = L (x(t)).
Devemos escolher s apropriadamente para garantir a convergência da integral em (4.1). Do ponto de vista
matemático e técnico, o domı́nio de s é importante. Entretanto, no sentido prático, quando equações diferenciais
são resolvidas, o domı́nio de s é geralmente ignorado.
Exemplo 4.1. Se x(t) = 1 para t ≥ 0, então
L (x(t)) =
Z
∞
e
0
−st
e−st
−s
1dt = lim
t→∞
t
!
= lim
0
t→∞
e−st
1
+
−s
s
=
1
,
s
sempre que Re(s) > 0. Portanto,
L (1) =
1
s
(s > 0).
Note que se s ≤ 0, então a integral diverge e não existiria a transformada de Laplace de x.
4.1.1
Exercı́cios
1. A partir da definição da transformada de Laplace, calcule L (f (t)) para os seguintes casos:
1. f (t) = 4t,
2. f (t) = e2t ,
3. f (t) = 2 cos(3t),
46
Capı́tulo 4. Princı́pios básicos da transformada de Laplace
4. f (t) = 1 − cos(ωt),
5. f (t) = te2t ,
6. f (t) = et sin(t),
1, t ≥ a,
7. f (t)
0, t < a,
sin(ωt), 0 < t ωπ ,
8. f (t)
π
0,
ω ≤ t,
2. Calcule a transformada de Laplace da função f (t) na qual o gráfico é apresentado na figura abaixo.
4.2
Ordem exponencial
Uma consideração importante para a classe de sinais que possuem a transformada de Laplace bem definida está
relacionada com a taxa de crescimento. Na definição
Z ∞
L (x(t)) =
e−st x(t)dt,
0
quando tomamos s > 0 (ou Re(s) > 0), a integral irá convergir sempre que x não cresça muito rápido. Uma taxa
de crescimento interessante para nosso propósito é dada na seguinte definição:
Definição 4.2. Um sinal x possui ordem exponencial α se existem constantes M > 0, t0 > 0 e α tal que
|x(t)| ≤ M eαt ,
t ≥ t0 .
Claramente o sinal eαt possui ordem exponencial α = a, enquanto que tn possui ordem exponencial α para
qualquer α > 0 e qualquer n ∈ N. Os sinais sin(t), cos(t), tan−1 (t) possuem ordem exponencial 0, e e−t possui
2
ordem −1. Entretanto, et não possui ordem exponencial.
4.2.1
Exercı́cios
1. Se f1 e f2 são funções contı́nuas por partes de ordem α e β, respectivamente, em [0, ∞), o que podemos dizer
sobre a continuidade e ordem das funções:
• c1 f1 + c2 f2 , com c1 , c2 ∈ R,
• f ◦ g.
2. Mostre que f (t) = tn possui ordem exponencial α para qualquer α > 0 e n ∈ N.
2
3. Mostre que a função g(t) = et não possui ordem exponencial.
4.3
A classe L
Agora iremos mostrar uma classe de sinais que possuem transformada de Laplace.
Teorema 4.1. Se x é contı́nuo por partes em [0, ∞) e de ordem exponencial α, então a transformada de Laplace
L (x) existe para Re(s) > α e converge absolutamente.
Demonstração. Primeiro, note que existem M1 > 0, t0 > 0 e α tais que
|x(t)| ≤ M1 eαt ,
t ≥ t0 ,
pois por hipótese, x possui ordem exponencial α. Além disso, x é contı́nuo por partes em [0, t0 ] e portanto limitado
neste intervalo, ou seja,
|x(t)| ≤ M2 ,
0 < t < t0 .
4.4 Propriedades básicas da transformada de Laplace
47
Como eαt possui um mı́nimo positivo em [0, t0 ], uma constante M suficientemente grande pode ser escolhida
tal que
|x(t)| ≤ M eαt ,
t > 0.
Portanto,
τ
Z
|e−st f (x)|dt ≤ M
Z
0
τ
e−(x−α)t dt =
0
M e−(x−α)t
−(x − α)
τ
=
0
M
M e−(x−α)τ
−
.
x−α
x−α
Tomando o limite quando τ → ∞ e notando que Re(s) = x > α, temos que
Z ∞
M
|e−st x(t)|dt ≤
,
x−α
0
ou seja, a integral converge absolutamente para Re(s) > α. Portanto x possui transformada de Laplace bem
definida.
Exemplo 4.2. Considere o sinal x(t) = eat , a ∈ R. Este sinal é contı́nuo em [0, ∞) e possui ordem exponencial a.
Então,
Z ∞
Z ∞
∞
e−(s−a)t
1
at
−st at
−(s−a)t
L (e ) =
e e dt =
e
dt =
=
,
(Re(s) > a).
−(s
−
a)
s
−
a
0
0
0
Os mesmos cálculos valem para a ∈ C e Re(s) >Re(a).
Exemplo 4.3. Aplicando a transformada de Laplace no sinal x(t) = t, t ≥ 0, que é contı́nuo e de ordem exponencial,
resulta em
Z ∞
Z
∞
−te−st
1 ∞ −st
1
1
−st
L (t) =
te dt =
+
e dt = L (1) = 2 ,
s
s
s
s
0
0
0
considerando que Re(s) > 0.
4.3.1
Exercı́cios
2
2
1. Considere a função g(t) = tet sin(et ).
1. A função g é contı́nua em [0, ∞)? Ela possui ordem exponencial?
2. Mostre que a transformada de Laplace de g existe para Re(s) > 0.
3. Mostre que g é a derivada de alguma função com ordem exponencial.
2. Sem precisar determinar, mostre que as seguintes funções possuem a transformada de Laplace.
1.
sin(t)
t ,
2.
1−cos(t)
,
t
3. t2 sinh(t).
4.4
Propriedades básicas da transformada de Laplace
Linearidade. Uma das propriedades mais básicas e úteis do operador de Laplace L é a linearidade. Se x1 possui
transformada de Laplace L (x1 ) para Re(s) > α, e x2 possui transformada de Laplace L (x2 ) para Re(s) > β, então
x1 + x2 possui transformada de Laplace para Re(s) > max{α, β} e
L (c1 x1 + c2 x2 ) = c1 L (x1 ) + c2 L (x2 ),
para c1 e c2 arbitrários.
Esta propriedade segue do fato que integração é um processo linear.
Exemplo 4.4. Considere o sinal cosseno hiperbólico
cosh ωt =
eωt + e−ωt
.
2
Pela propriedade da linearidade,
1
1
L (cosh(ωt)) =
L (eωt ) + L (e−ωt ) =
2
2
1
1
+
s−ω s+ω
=
s
.
s2 − ω 2
48
Capı́tulo 4. Princı́pios básicos da transformada de Laplace
Exemplo 4.5. Se x(t) = a0 + a1 t + · · · + an tn é um polinômio de grau n, então,
L (x(t)) =
n
X
ak L (tk ) =
k=0
4.4.1
X ak k!
.
sk+1
Exercı́cios
1. Encontre L (2t + 3e2t + 4 sin(3t)).
ω
2. Mostre que L (sinh(ωt)) = s2 −ω
2.
3. Calcule
1. L (cosh2 (ωt)),
2. L (sinh2 (ωt)).
4. Encontre L (3 cosh(2t) − 2 sinh(2t)).
Determine L (sin2 ωt) e L (cos2 (ωt)) usando as fórmulas
sin2 (ωt) =
1 1
− cos(2ωt),
2 2
cos2 (ωt) = 1 − sin2 (ωt),
respectivamente.
4.5
Inversa da transformada de Laplace
A aplicação da transformada de Laplace em problemas fı́sicos requer o uso da sua inversa em diversas situações. Se
L (x(t)) = X(s), então a transformada de Laplace inversa é definida como
L −1 (X(s)) = x(t),
t ≥ 0,
na qual mapeia a transformada de Laplace de uma função novamente para a função original. Por exemplo,
ω
L −1
= sin(ωt),
t ≥ 0.
s2 + ω 2
A questão surge naturalmente: poderia existir outro sinal x(t) 6= sin(ωt) com L (ω/(s2 + ω 2 )) = x(t)? Mais
precisamente, precisamos saber quando a transformada inversa é única.
Exemplo 4.6. Seja
x(t) =
sin(ωt), t > 0,
1,
t = 0.
Então
L (x(t)) =
s2
ω
.
+ ω2
Este exemplo ilustra que pode existir mais de uma representação para L −1 (F (s)). De fato, quando os sinais
são descontı́nuos, existem infinitas representações. Felizmente, para sinais contı́nuos este não é o caso:
Teorema 4.2. Sinais contı́nuos distintos em [0, ∞) possuem transformadas de Laplace distintas.
O resultado acima é conhecido como teorema de Lerch. Isto significa que se restringirmos nossas atenções para
funções contı́nuas em [0 ∞), então a transformada inversa
L −1 (X(s)) = x(t)
é unicamente definida.
Note também que L −1 é linear, isto é,
L −1 (aX(s) + bG(s)) = ax(t) + bg(t),
se L (x(t)) = X(s) e L (g(t)) = G(s). Este resultado segue diretamente da linearidade de L e vale no domı́nio
comum de X e G.
Exemplo 4.7.
1
1
1
1
1
1
−1
−1
−1
L
+
=L
+L
= et + e−t = cosh(t),
2(s − 1) 2(s + 1)
2(s − 1)
2(s + 1)
2
2
t ≥ 0.
4.6 Teoremas da translação
49
Observação 4.3. Nas situações em que a transformada de Laplace é aplicada em sinais descontı́nuos deve-se ter em
mente que podem existir outros sinais que possuem a mesma transformada inversa.
Exemplo 4.8. A função degrau é um sinal importante em sistemas da engenharia elétrica:
1, t ≥ a,
u(t) =
0, t < a.
Calculando a transformada de Laplace obtemos
Z ∞
Z ∞
e−st
e−st u(t)dt =
e−st dt = lim
L (u(t)) =
τ →∞ −s
0
a
τ
=
a
e−as
,
s
(Re(s) > 0).
Outro sinal interessante é apresentado no seguinte exemplo.
Exemplo 4.9. Para 0 ≤ a < b seja
u(t) =
0,
t < a,
a ≤ t < b,
t ≥ b.
1
b−a ,
0,
Então,
L (u(t)) =
4.6
e−as − e−bs
.
s(b − a)
Teoremas da translação
Nesta seção apresentamos dois resultados bastante úteis para determinar a transformada de Laplace e suas inversas.
O primeiro pertence à translação no domı́nio s e o segundo à translação no domı́nio do tempo contı́nuo t.
Teorema 4.3. Se X(s) = L (x(t)) para Re(s) > 0, então
F (s − a) = L (eat x(t)),
(a real, Re(s) > a) .
Demonstração. Para Re(s)>a,
∞
Z
e−(s−a)t x(t)dt =
X(s − a) =
∞
Z
0
e−st eat x(t)dt = L (eat x(t)).
0
Exemplo 4.10. Como
L (t) =
1
,
s2
(Re(s) > 0),
então
L (teat ) =
1
,
(s − a)2
(Re(s) > 0),
(Re(s) > a).
Isto nos dá a inversa
L
−1
1
(s − a)n+1
=
1 n at
t e ,
n!
t ≥ 0.
Exemplo 4.11. Como
L (sin(ωt)) =
ω
,
s2 + ω 2
então
L (e2t sin(3t)) =
3
.
(s − 2)2 + 9
Teorema 4.4. Se X(s) = L (x(t)), então
L (x(t − a)) = e−as X(s),
(a ≥ 0).
50
Capı́tulo 4. Princı́pios básicos da transformada de Laplace
Demonstração. Note que
Z
∞
e
−st
Z
[x(t − a)]dt =
0
∞
e−st x(t − a)dt.
a
Defina τ = t − a. Então o lado direito da integral acima torna-se
Z ∞
Z ∞
e−τ s x(τ )dτ = e−as X(s).
e−s(τ +a) x(τ )dτ = e−as
0
0
Exemplo 4.12. Vamos determinar L (g(t)), na qual g é definida por
g(t) =
0,
(t − 1)2 ,
0 ≤ t < 1,
t ≥ 1.
Note que g é o sinal t2 atrasado por 1 unidade de tempo. Então,
L (g(t)) = L ((t − 1)2 ) = e−s L (t2 ) =
2e−s
,
s3
(Re(s) > 0).
O segundo teorema da translação pode ser também considerado para o cálculo da forma inversa:
−1
−s 2
L
e
= (t − 1)2 .
s3
4.6.1
Exercı́cios
1. Determine
1. L (e2t sin(3t)),
2. L (t2 e−ωt ),
4
,
3. L −1 (s−4)
3
√
4. L (e7t sinh( 2t)),
1
,
5. L −1 s2 +2s+5
6. L
s
s2 +6s+1
,
7. L (e−at cos(ωt + θ)),
s
8. L −1 (s+1)
.
2
2. Determine L (f (t)) para
0,
0 ≤ t < 2,
• f (t) =
eat , t ≥ 2
• f (t) =
0,
0≤t<
sin(t), t ≥ π2 ,
π
2,
3. Encontre
−2s • L −1 e s3 ,
• L
E
s
• L −1
−
s
−as
s2 +1 e
e−πs
s2 −2
.
, E constante,
4.7 Frações parciais
4.7
51
Frações parciais
Em diversas aplicações da transformada de Laplace é necessário encontrar a inversa de um sinal transformada
particular X(s). Tipicamente o sinal é uma função que não é imediatamente reconhecida como a transformada de
Laplace de alguma função elementar, por exemplo
X(s) =
1
,
(s − 2)(s − 3)
para s pertencente a uma região Ω. O procedimento necessário para este caso é decompor este sinal em frações
parciais.
No exemplo anterior, podemos decompor X em somas de duas expressões fracionárias:
A
B
1
=
+
,
(s − 2)(s − 3)
s−2 s−3
isto é,
1 = A(s − 3) + B(s − 2).
Como a equação acima iguala dois polinômios (1 e A(s − 3) + B(s − 2)) que são iguais para todo s ∈ Ω, exceto
possivelmente para s = 2 e s = 3, os dois polinômios são identicamente iguais para todos valores de s.
Então, se s = 2, A = −1, e se s = 3, B = 1. Portanto,
1
−1
1
=
+
.
(s − 2)(s − 3)
s−2 s−3
Finalmente,
x(t) = L
−1
(X(s)) = L
−1
−1
s−2
+L
−1
1
s−3
.
Decomposição em frações parciais. Iremos consideram o quociente de dois polinômios:
X(s) =
P (s)
,
Q(s)
na qual o grau de Q é maior que o grau de P , e P e Q não possuem fatores comuns. Então X pode ser expressado
como uma soma finita de frações parciais.
• Para cada fator linear da forma as + b de Q, há uma fração parcial correspondente da forma
A
,
as + b
A constante.
• Para cada fator linear repetido com a forma (as + b)n , existe uma fração parcial correspondente da forma
A2
A1
An
+
+ ··· +
,
as + b (as + b)2
(as + b)n
A1 , A2 , . . . , An constantes.
• Para todo fator quadrático da forma as2 + bs + c, existe uma fração parcial correspondente com a forma
As + B
,
as2 + bs + c
A, B constantes.
• Para qualquer fator quadrático repetido da forma (as2 + bs + c)n , há uma fração parcial correspondente da
forma
A1 s + B1
A2 s + B2
An s + B n
+
+ ··· +
,
as2 + bs + c (as2 + bs + c)2
(as2 + bs + c)n
A1 , A2 , . . . , An constantes.
O objetivo é determinar as constantes, uma vez que o polinômio P (s)/Q(s) for representado por uma decomposição em fração parcial. Isto pode ser feito por diversos métodos.
52
Capı́tulo 4. Princı́pios básicos da transformada de Laplace
4.7.1
Exercı́cios
1. Encontre L −1 das seguintes funções através do método de frações parciais.
•
1
(s−a)(s−b) ,
•
s
2s2 +s−1 ,
•
s2 +1
s(s−1)3 ,
•
s
(s2 +a2 )(s2 +b2 ) ,
•
s
(s2 +a2 )(s2 −b2 ) ,
•
s+2
s5 −3s4 +2s3 ,
•
2s2 +3
(s+1)2 (s2 +1)2 ,
•
s2 +s+3
s(s3 −6s2 +5s+12)
(a 6= b),
53
Capítulo 5
Aplicações
Equações diferenciais ordinárias descrevem certos fenômenos que variam com o tempo, tais como a corrente em um
circuito elétrico, oscilações de uma membrana, ou o fluxo de calor em um condutor. Estas equações estão geralmente
acopladas com condições iniciais que descrevem o estado do sistema no instante de tempo t = 0.
Uma técnica poderosa para resolver estes problemas é através da transformada de Laplace, na qual converte a
equação diferencial original em uma expressão elementar algébrica. Esta última pode ser transformada mais uma
vez, através da transformada de Laplace inversa, para encontrar a solução do problema. Neste capı́tulo, iremos
apresentar o método da transformada de Laplace para resolver equações diferenciais ordinárias.
5.1
A transformada de Laplace da derivada de um sinal
Para resolvermos equações diferenciais ordinárias, é necessário saber a transformada de Laplace da derivada x0 de
uma função x. Este resultado é apresentado no seguinte teorema:
Teorema 5.1. Suponha que x seja contı́nua em (0, ∞) e de ordem exponencial α. Além disso, considere que x0 é
contı́nua por partes em [0, ∞). Então
L (x0 (t)) = sL (x(t)) − x(0+ ),
Re(s) > α
(5.1)
Demonstração. Integrando por partes,
Z
0
∞
e−st x0 (t)dt =
Z
lim
δ→0τ →∞
τ
e−st x0 (t)dt
δ
Z τ
τ
= lim
e−st x(t) δ + s
e−st x(t)dt
δ→0τ →∞
δ
Z τ
= lim
e−sτ x(τ ) − e−sδ x(δ) + s
e−st x(t)dt
δ→0τ →∞
δ
Z τ
= −x(0+ ) + s
e−st x(t)dt, (Re(s) > α).
δ
Portanto,
L (x0 (t)) = sL (x(t)) − x(0+ ).
Nos cálculos acima usamos o fato de que para Re(s) = c > α,
|e−sτ x(τ )| ≤ e−cτ M eατ = M e−(c−α)τ → 0, quando τ → ∞.
Além disso, note que x(0+ ) existe, pois x0 (0+ ) = limt→0+ f 0 (t) existe.
A virtude do teorema anterior é que podemos calcular L (x0 (t)) em termos de L (x(t)).
Observação 5.1. Note que no teorema acima nós obtemos L (x0 (t)) sem requerer que x0 seja de ordem exponencial.
Observação 5.2. Claramente, se x é contı́nua em t = 0, então x(0+ ) = x(0) e nossa fórmula se torna
L (x0 (t)) = sL (x(t)) − x(0).
54
Capı́tulo 5. Aplicações
Exemplo 5.1. Vamos calcular L (sin2 (ωt)) e L (cos2 (ωt)) a partir de (5.1). Para x(t) = sin2 (ωt), temos x0 (t) =
2ω sin(ωt) cos(ωt) = ω sin(2ωt). De (5.1) obtemos,
L (ω sin(2ωt)) = sL (sin2 (ωt)) − sin2 (0+ ),
isto é,
1
L (ω sin(2ωt))
s
2ω
ω
=
s s2 + 4ω 2
2ω 2
=
.
2
s(s + 4ω 2 )
L (sin2 (ωt)) =
De maneira similar,
1
1
L (−ω sin(2ωt)) +
s
s
ω
1
2ω
+
=− 2
s s + 4ω 2
s
s2 + 2ω 2
=
.
s(s2 + 4ω 2 )
L (cos2 (ωt)) =
Para tratar equações diferenciais também teremos que saber L (x00 ) e assim por diante. Suponha que podemos
aplicar (5.1). em x00 . Então,
L (x00 (t)) = sL (x0 (t)) − x0 (0+ )
= s(sL (x(t)) − x(0+ )) − x0 (0+ )
= s2 L (x)(t) − sx(0+ ) − x0 (0+ ).
Similarmente,
L (x000 (t)) = sL (x00 (t)) − x00 (0+ )
= s3 L (x(t)) − s2 x(0+ ) − sx0 (0+ ) − x00 (0+ ).
No caso geral temos o seguinte resultado:
Teorema 5.2. Suponha que x, x0 , dots, x(n−1) são contı́nuas em (0, ∞) e de ordem exponencial, enquanto que x(n)
é contı́nua por partes em [0, ∞). Então,
L (x(n) (t)) = sn L (x(t)) − sn−1 x(0+ ) − sn−2 x0 (0+ ) − · · · − x(n−1) (0+ ).
5.2
A transformada de Laplace da integral de um sinal
Em certas equações diferenciais também é necessário calcular a transformada de Laplace de uma integral. Neste
caso, podemos utilizar o seguinte resultado:
Teorema 5.3. Se f é contı́nua por partes em [0, ∞), de ordem exponencial α, e
Z t
g(t) =
f (τ )dτ.
0
Então,
L (g(t)) =
1
L (f (t)),
s
(Re(s) > α)
Demonstração. Como g 0 (t) = f (t), exceto nos pontos de descontinuidade de f integrando por partes resulta em
Z ∞
Z
τ
g(τ )e−sτ
1 t −sτ
e−st g(t)dt = lim
+
e
f (τ )dτ .
τ →∞
−s
s 0
0
0
Como g(0) = 0, precisamos calcular apenas
g(τ )e−sτ
.
τ →∞
−s
lim
5.3 Equações diferenciais ordinárias
55
Note que
|g(τ )e−sτ | ≤ e−xτ
τ
Z
|f (u)|du
0
≤ M e−xτ
Z
τ
eau du
0
=
M −(x−a)τ
(e
− e−xτ ) → 0
a
para τ → ∞ e x = Re(s) > a > 0.
De maneira similar, isto também vale para a = 0. Portanto,
L (g(t)) =
5.3
1
L (f (t))
s
(Re(s) > a).
Equações diferenciais ordinárias
O teorema da derivada nos possibilita utilizar a transformada de Laplace como ferramenta para resolver equações
diferenciais ordinárias.
Exemplo 5.2. Considere o problema de valor inicial
d2 y
(t) + y(t) = 1,
dt2
y(0) = y 0 (0) = 0.
Tomando a transformada de Laplace em ambos os lados da equação diferencial acima temos
L (y 00 ) + L (y) = L (1).
Logo,
s2 L (y) − sy(0) − y 0 (0) + L (y) =
1
,
s
isto é
L (y) =
1
.
s(s2 + 1)
Escrevendo
1
A Bs + C
= + 2
s(s2 + 1)
s
s +1
como uma decomposição em frações parciais, temos que
L (y) =
1
s
− 2
.
s s +1
Aplicando a transformada inversa obtemos
y = 1 − cos(t).
para t ≥ 0.
No exemplo acima, note que as condições iniciais do problema foram absorvidas nos cálculos.
Procedimento geral. O método da transformada de Laplace para resolver EDOs pode ser resumido pelos seguintes
passos:
1. Aplique a transformada de Laplace em ambos os lados da equação. Isto irá resultar no que é chamado de
equação transformada.
2. Obtenha uma equação L (y) = F (s), na qual F (s) é uma expressão algébrica na variável s.
3. Aplique a transformada inversa para obter a solução y = L −1 (F (s)).
As várias técnicas para determinar a transformada de Laplace inversa incluem decomposição em frações parciais,
teoremas da translação, derivada e integral.
56
Capı́tulo 5. Aplicações
Exemplo 5.3. Resolva
y 000 + y 00 = et + t + 1,
y(0) = y 0 (0) = y 00 (0) = 0.
Aplicando L em ambos os lados,
L (y 000 ) + L (y 00 ) = L (et ) + L (t) + L (1),
ou
3
s L (y) − s2 y(0) − sy 0 (0) − y 00 (0) + s2 L (y) − sy(0) − y(0) =
1
1
1
+ 2+ .
s−1 s
s
Substituindo a condição inicial obtemos
s3 L (y) + s2 L (y) =
2s2 − 1
,
s2 (s − 1)
ou ainda
L (y) =
2s2 − 1
.
s4 (s + 1)(s − 1)
Aplicando a decomposição em frações parciais na expressão acima, temos que
L (y) =
s4 (s
2s2 − 1
A
B
C
D
E
F
= + 2+ 3+ 4+
+
,
+ 1)(s − 1)
s
s
s
s
s+1 s−1
e consequentemente
L (y) = −
1
1
1
1
+
.
+ 4−
2
s
s
2(s + 1) 2(s − 1)
Portanto,
y = −L −1
1
s2
+ L −1
1
s4
1
− L −1
2
1
(s + 1)
1
+ L −1
2
1
(s − 1)
1
1
1
= −t + t3 − e−t + et .
6
2
2
Em geral, o método da transformada de Laplace é aplicável em problemas de valores iniciais de EDOs lineares
de ordem n com coeficientes constantes, isto é,
dn−1 y
dn y
+
a
+ · · · + a0 y = f (t),
n−1
dtn
dtn−1
y(0) = y0 , y 0 (0) = y1 , . . . , y (n−1) (0)yn−1 .
an
Do ponto de vista da engenharia, f (t) é conhecido como uma entrada, excitação, e y = y(t) é a saı́da.
Exemplo 5.4. Resolva
y 00 + y = Eu(t − a),
y(0) = 0, y 0 (0) = 1.
Aqui, o sistema possui uma entrada nula para 0 ≤ t < a e E é constante para t ≥ a. Então,
s2 L (y) − sy(0) − y 0 (0) + L (y) =
Ee−as
,
s
e
Ee−as
1
+
+ 1 s(s2 + 1)
1
1
s
= 2
+E
− 2
e−as .
s +1
s s +1
L (y) =
s2
Logo,
y = L −1
1
s2 + 1
+ EL −1
1
s
−
s s2 + 1
e−as
= sin(t) + Eu(t − a)(1 − cos(t − a)).
Também podemos expressar y da seguinte forma
sin(t),
0 ≤ t < a,
y=
sin(t) + E(1 − cos(t − a)), t ≥ a.
5.3 Equações diferenciais ordinárias
57
R
+
E(t)
+
−
−
I(t)
−
+
L
Figura 5.1: Circuito RL utilizado no Exemplo 5.6.
Sistemas de equações diferenciais. Sistemas de equações diferenciais também podem ser resolvidos pelo método da
transformada de Laplace.
Exemplo 5.5.
dy
= −z,
dt
dz
= y,
dt
y(0) = 1, z(0) = 0.
Então
L (y 0 ) = −L (z),
ou seja,
sL (y) − 1 = −L (z).
Além disso,
L (z 0 ) = L (y),
isto é,
sL (z) = L (y).
Resolvendo simultaneamente as equações acima obtemos
s2 L (y) − s = −sL (z) = L (y),
ou
L (y) =
s
.
s2 + 1
Portanto,
y = cos(t),
z = −y 0 = sin(t).
Exemplo 5.6. No circuito
RL da Figura 5.1, a queda de tensão no indutor, resistor e capacitor são dadas por
Rt
L(dI/dt), RI e 1/C 0 I(τ )dτ , respectivamente, na qual a lei da tensão de Kirchoff afirma que a soma da queda de
tensão de cada componente é igual a tensão de entrada, E(t) = E0 sin(ωt), com E0 , ω > 0, isto é,
L
dI
+ RI = E(t) = E0 sin(ωt).
dt
Tomando a transformada de Laplace da expressão anterior, temos
LsL (I) + RL (I) =
E0 ω
,
+ ω2
s2
58
Capı́tulo 5. Aplicações
isto é,
L (I) =
E0 ω
.
(Ls + R)(s2 + ω 2 )
Considerando expansão em frações parciais,
L (I) =
A
Bs + C
E0 ω
,
.=
+
(Ls + R)(s2 + ω 2 )
s + R/L s2 + ω 2
encontramos
A=
E0 Lω
,
2
L ω 2 + R2
B=
−E0 Lω
,
+ R2
C=
L2 ω 2
E0 Rω
,
2
L ω 2 + R2
e portanto,
I(t) =
R
E0 Lω
E0 R
E0 Lω
e− L t + 2 2
sin(ωt) − 2 2
cos(ωt).
L2 ω 2 + R2
L ω + R2
L ω + R2
Exemplo 5.7. Considere uma massa m suspensa em uma mola fixada em uma e extremidade (veja a Figura 5.2).
A posição de equilı́brio é definida por x = 0, o deslocamento para baixo é representado por x > 0, enquanto que o
deslocamento para sima é dado por x < 0.
Para analisarmos este sistema, seja:
• k > 0 a constante da mola.
• ax0 a força de amortecimento causada pelo ar, na qual a >, isto é, a força de amortecimento é proporcional a
velocidade.
• F (t) representa todas as forças externas aplicadas em m.
Então, pela segunda lei de Newton temos que
mx00 = −kx − ax0 + F (t)
(5.2)
Se a = 0, dizemos que o movimento é não amortecido. Se a 6= 0, o movimento é amortecido. Se F (t) = 0 (isto
é, sem forças aplicadas) o movimento é livre; caso contrário ele é forçado.
Para F (t) = 0 podemos reescrever (5.2) como
mx00 + kx + ax0 = 0.
Defina a/m = 2b e k/m = c2 , então,
x00 + 2bx + c2 x0 = 0.
A equação caracterı́stica desta expressão é
λ2 + 2bλ + c2 = 0,
x<0
m
Equilı́brio
x>0
Figura 5.2: Diagrama do sistema massa mola considerado no exemplo 5.7.
5.3 Equações diferenciais ordinárias
59
com raı́zes
λ = −b ±
p
b2 − c2 .
Note que o comportamento resultante do sistema depende da relação entre b e c. Um caso interessante é quando
0 < b < c, na qual obtemos
p
p
x(t) = e−bt (c1 sin(t b2 − c2 ) + c2 cos(t b2 − c2 )),
que, após algumas manipulações algébricas (definindo d =
p
c21 + c22 e cos(ϕ) = c2 /d) pode ser reescrito como
p
x(t) = de−bt cos(t c2 − b2 − ϕ).
Esta expressão representa o comportamento oscilatório amortecido do sistema.
Agora, vamos considerar um impulso unitário aplicado ao sistema, isto é, F (t) = δ(t), e x(0) = x0 (0) = 0. Então,
aplicando a transformada de Laplace em (5.2) temos
L (x00 ) + 2bL (x0 ) + c2 L (x) = L (δ) = 1.
Logo,
L (x) =
22
1
1
=
.
2
2
+ 2bs + c
(s + b) + (c2 − b2 )
Portanto,
x(t) = √
p
1
e−bt sin(t c2 − b2 ),
c2 − b2
que é um comportamento oscilatório amortecido.
5.3.1
Exercı́cios
1. Resolva os seguintes problemas de valor inicial usando o método da transformada de Laplace.
1.
dy
dt
− y = cos(t), y(0) = −1,
2.
dy
dt
+ y = t2 et , y(0) = 2,
3.
d2 y
dt2
+ 4y = sin(t), y(0) = 1, y 0 (0) = 0,
4.
d2 y
dt2
t
0
− 2 dy
dt − 3y = te , y(0) = 2, y (0) = 1,
5.
d3 y
dt3
0
00
+ 5 ddt2y + 2 dy
dt − 8y = sin(t), y(0) = 0, y (0) = 0, y (0) = −1,
6.
d2 y
dt2
+
2
dy
dt
7. y 00 + y =
= f (t), y(0) = 1, y 0 (0) = −1, f (t) =
1, 0 < t < 1,
0, t > 1
cos(t), 0 ≤ t ≤ π,
y(0) = 0, y 0 (0) = 0,
0,
t > π,
8. y (4) − y = 0, y(0) = 1, y 0 (0) = y 00 (0) = y 000 (0) = 0.
2. Suponha que a corrente I em um circuito elétrico satisfaz
L
dI
+ RI = E0 ,
dt
na qual L, R, E0 são constantes positivas.
1. Encontre I(t) para t > 0 se I(0) = I0 > 0.
2. Mostre que I(t) tende para E0 /R quando t → ∞.
60
Capı́tulo 5. Aplicações
5.4
Valores assintóticos
Duas propriedades da transformada de Laplace são úteis para determinar o valor de f (t) quando t → 0 ou quando
t → ∞, mesmo que a função não seja conhecida explicitamente.
Teorema 5.4. Suponha que f , f 0 satisfazem as condições do Teorema 5.1, e que F (s) = L (f (t)). Então,
f (0+ ) = lim f (t) = lim sF (s)
(para s real)
s→∞
t→0+
Demonstração. Pelas propriedades da transformada de Laplace, sabemos que L (f 0 (t)) = G(s) → 0 quando s → ∞.
Pelo teorema da derivada,
G(s) = sF (s) − f (0+ ),
Re(s) > a.
Tomando o limite,
0 = lim G(s) = lim (sF (s) − f (0+ )).
s→∞
s→∞
Portanto,
f (0+ ) = lim sF (s).
s→∞
Teorema 5.5. Suponha que f satisfaz as condições do teorema 5.1 e que o limite limt→∞ f (t) existe. Então,
lim f (t) = lim sF (s),
t→∞
s→0
(s real),
na qual F (s) = L (f (t)).
Demonstração. Note que f possui ordem exponencial a = 0, já que ela é limitada por hipótese. Pelo teorema da
derivada,
G(s) = L (f 0 (t)) = sF (s) − f (0+ )
(s > 0).
Tomando o limite,
lim G(s) = lim sF (s) − f (0+ ).
s→0
(5.3)
s→0
Além disso,
∞
Z
e−st f 0 (t)dt =
lim G(s) = lim
s→0
s→0
0
A integral acima pode ser reescrita para
Z ∞
Z
f 0 (t)dt = lim
τ →∞
0
Z
∞
f 0 (t)dt.
(5.4)
0
τ
f 0 (t)dt = lim (f (τ ) − f (0+ )).
τ →∞
0
(5.5)
Portanto, igualando (5.3)-(5.5) obtemos
lim f (t) = lim F (s).
t→∞
s→0
Exemplo 5.8. Seja f (t) = sin(t). Então,
lim sF (s) = lim
s→0
s→0 s2
s
= 0,
+1
mas limt→∞ f (t) não existe! Então, podemos deduzir que se lims→0 sF (s) = L, então, ou limt→∞ f (t) = L ou este
limite não existe. Isto é o melhor que podemos fazer sem saber a priori se limt→∞ f (t) existe.
5.5 Convolução
5.4.1
61
Exercı́cios
1. Sem determinar f (t) e assumindo que f (t) satisfaz as hipóteses do teorema do valor inicial, calcule f (0+ ) se
1. L (f (t)) =
s3 +3a2 s
(s2 −a2 )3 ,
√
2
2
n
−s)
, n ≥ 0,
2. L (f (t)) = ( s√s+a
2 +a2
3. log s+a
s+b , a 6= b.
2. Sem determinar f (t), e assumindo que f (t) satisfaz as hipóteses do teorema do valor final, calcule limt→∞ f (t) se
1. L (f (t)) =
s=b
(s+b)2 +a2 ,
2. L (f (t)) =
1
s
+ tan−1
b > 0,
a
s .
3. Mostre que
lim s
s→0
s
(s2 + a2 )2
existe, e
L
t
sin(at)
2a
mas
lim
t→∞
=
s
,
(s2 + a2 )2
t
sin(at)
2a
não existe.
5.5
Convolução
Uma das propriedades mais significativas da conexão entre a convolução e a transformada de Laplace é que a
transformada de Laplace da convolução de duas funções é o produto das transformadas de Laplace.
Teorema 5.6. Se f (t) e g(t) (definidas para t ≥ 0) são contı́nuas por partes em [0, ∞) e de ordem exponencial a,
então
L [(f ∗ g)(t)] = L (f (t))L (g(t))
(Re(s) > a).
Demonstração. Note que
Z
∞
Z
∞
L (f (t))L (g(t)) =
e
f (τ )dτ
e
g(u)du
0
0
Z ∞ Z ∞
=
e−s(τ +u) f (τ )g(u)du dτ.
−sτ
0
−su
0
Substituindo t = τ + u, e observando que τ é fixo na integral dentro, então du = dt, temos
Z ∞ Z ∞
−st
L (f (t))L (g(t)) =
e f (τ )g(t − τ )dt dτ.
0
τ
Se definirmos g(t) = 0 para t < 0, então g(t − τ ) = 0 para t < τ e podemos reescrever a expressão acima como
Z ∞Z ∞
L (f (t))L (g(t)) =
e−st f (τ )g(t − τ )dtdτ.
0
0
Devido às hipóteses em f e g, a integral de Laplace de f e g converge absolutamente e portanto, podemos
inverter a ordem de integração da expressão acima. Logo,
Z ∞Z ∞
L (f (t))L (g(t)) =
e−st f (τ )g(t − τ )dτ dt
Z ∞0Z 0∞
e−st f (τ )g(t − τ )dτ dt
0
0
Z ∞
Z ∞
−st
e
f (τ )g(t − τ )dτ dt
0
0
= L [(f ∗ g)(t)].
62
Capı́tulo 5. Aplicações
Exemplo 5.9.
L (eat ∗ ebt ) =
1
.
(s − a)(s − b)
Além disso,
L
−1
1
(s − a)(s − b)
= eat ∗ ebt
Z
t
eaτ eb(t−τ ) dτ
=
0
at
=
5.5.1
e
− ebt
,
a−b
a 6= b.
Exercı́cios
1. Use o teorema da convolução para encontrar o seguinte:
1
1. L −1 (s−1)(s+2)
,
2. L −1 s(s21+1) ,
3. L −1 s2 (s12 +1) ,
1
4. L −1 s2 (s+4)
,
2
5. L −1 s2 (s2s+1)3
2. Resolva o problema de valor inicial
y 00 = 2y 0 − 3y = f (t),
5.6
y(0) = y 0 (0) = 0.
Funções de transferência
Sabemos que no domı́nio do tempo a saı́da de um sistema linear e invariante no tempo, para um determinado sinal
de entrada, é representada pela integral de convolução
y(t) = h ∗ u(t),
(5.6)
na qual h é a resposta ao impulso do sistema e u é o sinal de entrada.
Aplicando o resultado do Teorema 5.6, temos que
Y (s) = H(s)U (s),
(5.7)
sendo Y (s) e U (s) a transformada de Laplace de y(t) e u(t), respectivamente.
Definição 5.1. A função H(s) em (5.7), definida para a variável complexa s, é chamada de função de transferência
de U (s) para Y (s).
Exemplo 5.10. Considerando um sistema linear descrito pela equação
dn y
dn−1 y
dy
dm u
dm−1 u
du
(t)
+
a
(t)
+
·
·
·
+
a
(t)
+
b
(t) + · · · + bm−1 (t) + bm u(t),
(t)
+
a
y(t)
=
b
1
n−1
n
0
1
dtn
dtn−1
dt
dtm
dtm−1
dt
na qual todos os coeficientes ai , para i ∈ {1, . . . , n}, e bk , para k ∈ {1, . . . , m}, são constantes e n ≥ m.
Então, considerando uma entrada do tipo impulso, aplicando a transformada de Laplace e supondo que as
n−1y
m−1u
condições iniciais são nulas, isto é, y(0) = · · · = ddtn−1 (0) = u(0− ) = · · · = ddtm−1 (0− ) = 0, temos
(sn + a1 sn−1 + · · · + an−1 s + an )Y (s) = (b0 sm + b1 sm−1 + · · · + bm−1 s + bm ),
ou seja,
Y (s) =
b0 sm + b1 sm−1 + · · · + bm−1 s + bm
.
sn + a1 sn−1 + · · · + an−1 s + an
H(s) =
b0 sm + b1 sm−1 + · · · + bm−1 s + bm
.
sn + a1 sn−1 + · · · + an−1 s + an
Logo, neste caso,
5.7 Estabilidade
5.6.1
63
Pólos e zeros
Considere uma função de transferência racional descrita pela razão de dois polinômios em s,
H(s) =
b0 sm + b1 sm−1 + · · · + bm−1 s + bm
.
sn + a1 sn−1 + · · · + an−1 s + an
(5.8)
Definição 5.2. As raı́zes do numerador de (5.8), z1 , z2 , . . . , zm são chamados zeros (finitos) do sistema. Note que
a função de transferência é zero quando s = zi , para i ∈ {1, . . . , m}.
Definição 5.3. As raı́zes do denominador de (5.8), p1 , p2 , . . . , pn são chamados de pólos do sistema. A magnitude
da função de transferência tende a infinito quando s → pi , para i ∈ {1, . . . , n}.
Os zeros e os polos podem ser valores complexos e podemos dispor suas localizações em um plano complexo, na
qual referenciaremos como plano s. Dizemos que o sistema possui n − m zeros no infinito se m < n, pois a função
de transferência tende a zero quando s tende a infinito.
Os polos do sistema do sistema determinam as propriedades do sistema, conforme veremos na próxima seção.
Eles também determinam o comportamento natural ou não forçado do sistema.
5.7
5.7.1
Estabilidade
Estabilidade BIBO
Considere um sistema linear invariante no tempo descrito por
Y (s) = H(s)U (s),
na qual H é uma função de transferência racional (veja a Equação (5.8)), e Y (s) e U (s) a transformada de Laplace
de y(t) e u(t), respectivamente.
Teorema 5.7. Um sistema com função de transferência racional H(s) é BIBO estável se e somente se todos os polos
de H possuem parte real negativa, ou de forma equivalente, estão localizados no semi-plano esquerdo do plano s.
De fato, se a função de transferência do sistema é racional então
H(s) =
b0 sm + b1 sm−1 + · · · + bm−1 s + bm
,
sn + a1 sn−1 + · · · + an−1 s + an
(5.9)
na qual n ≥ m.
Note que a expressão acima pode ser sempre decomposta em frações parciais. Se H(s) possui polos pi com
multiplicidade mi , os fatores da expansão em frações parciais contém termos
1
1
1
,
,...,
.
2
s − pi (s − pi )
(s − pi )mi
Logo, a transformada de Laplace
inversa de H contém os fatores epi t , tepi t , . . . , tmi−1 epi t . É fácil verificar que
R∞
para todos os termos teremos 0 h(t)dt < ∞ se e somente se pi possui parte real negativa.
5.7.2
Estabilidade interna
P (s)
Para um sistema descrito por uma função de transferência H(s) = Q(s)
podemos determinar a estabilidade interna
somente são não há o cancelamento de fatores comuns entre P (s) e Q(s). Neste caso, a estabilidade interna pode
ser estabelecida em termos dos polos da função de transferência do sistema:
• Um sistema linear invariante no tempo é assintoticamente estável se e somente se todos os polos de sua função
de transferência possuem parte real negativa. Os polos podem ser simples ou repetidos.
• Um sistema linear invariante no tempo é instável se e somente se uma ou ambas as seguintes condições são
satisfeitas: (i) ao menos um polo de H(s) está no semi-plano direito do plano s; (ii) existem polos repetidos
no eixo imaginário.
• Um sistema linear invariante no tempo é marginalmente estável se e somente se não há polos de H no
semi-plano direito do plano s e algum polo não repetido no eixo imaginário.
A estabilidade assintótica implica em estabilidade BIBO. Entretanto, em geral, estabilidade BIBO não implica
em estabilidade assintótica.
64
Capı́tulo 5. Aplicações
5.7.3
Exercı́cios
1. Um sistema com resposta ao impulso h(t) = te−t é BIBO estável?
2. Mostre que o sistema da figura abaixo é BIBO estável se e somente se o ganho a possui magnitude menor que 1.
Para a = 1, encontre uma entrada limitada r que excita uma saı́da ilimitada.
3. Considere um sistema com função de transferência H(s) = (s − 2)/(s + 1). Quais são as respostas de estado
estacionário excitadas por u(t) = 3, para t ≥ 0 e por u(t) = sin(2t), para t ≥ 0?
5.8
Resposta temporal de sistemas descritos por função de transferência
Uma vez que a função de transferência é determinada, podemos analisar a resposta do sistema através de sua
representação. Quando as equações do sistema são dadas por EDOs, a função de transferência será uma razão de
polinômios, isto é,
P (s)
H(s) =
,
Q(s)
na qual estamos assumindo que P e Q não têm fatores em comum.
Os polos e zeros descrevem completamente H, exceto por uma constante multiplicadora. Como a resposta ao
impulso é dada pela função do tempo correspondente da função de transferência, chamamos a resposta ao impulso
de resposta natural do sistema. Podemos usar os pólos e zeros para calcular a resposta no tempo correspondente e
identificar a evolução do sistema com a localização dos polos no plano s.
5.8.1
Sistemas descritos por funções de transferência de primeira ordem
Para um sistema de primeira ordem,
1
s+σ
indica que a resposta ao impulso será uma função exponencial, ou seja
H(s) =
h(t) = e−σt .
Quando σ > 0, o polo esta localizado no semi-plano esquerdo do plano s, e portanto a expressão exponencial
decai exponencialmente. Neste caso, o sistema é BIBO estável (assintoticamente estável se não houver cancelamento
entre pólos e zeros de H, conforme apresentado na seção anterior). Se σ < 0, o pólo está no semi-plano direito do
plano s. Como a expressão exponencial irá crescer em função do tempo, a resposta ao impulso será instável.
Quando H possui resposta ao impulso estável, definimos a constante de tempo como sendo o instante de tempo
t = 1/σ, ou seja, o tempo em que a resposta é 1/e vezes o valor inicial. Portanto ela pode ser usada como uma
medida da taxa de decaimento do sistema.
5.8.2
Sistemas descritos por funções de transferência de segunda ordem
Funções de transferência de segunda ordem tipicamente possuem a seguinte forma polinomial
H(s) =
ωn2
s2 + 2ξωn s + ωn2
(5.10)
na qual o parâmetro ξ é chamado
de coeficiente de amortecimento e ωn é a frequência natural não amortecida. Os
p
polos são s = −ξωn ± jωn 1 − ξ 2 e estão localizado em um raio ωn e ângulo θ = sin−1 (ξ) no plano s.
Para encontrar a resposta temporal de (5.10), é conveniente reescrevermos (5.10) para
H(s) =
ωn2
.
(s + ξωn )2 + ωn2 (1 − ξ 2 )
A resposta ao impulso da expressão acima é
ωn
e−σt sin(ωd t),
h(t) = p
1 − ξ2
p
na qual ωd = ωn 1 − ξ 2 e σ = ξωn .
A transformada de Laplace inversa de H para uma entrada do tipo degrau é
σ
−σt
y(t) = 1 − e
cos(ωd t) +
sin(ωd t) .
ωd
O gráfico de (5.11) para diferentes valores de ξ é apresentada na Figura 5.3.
(5.11)
5.8 Resposta temporal de sistemas descritos por função de transferência
2
ξ = 0.1
ξ = 0.2
ξ = 0.3
ξ = 0.4
ξ = 0.5
ξ = 0.6
ξ = 0.7
ξ = 0.8
ξ=0
1.5
y(t)
65
1
ξ = 0.9
0.5
0
0
ξ=1
2
4
6
t (seconds)
8
10
12
Figura 5.3: Resposta de um sistema de segunda ordem para uma entrada do tipo degrau.
A parte real de σ determina a taxa de decaimento da exponencial que está multiplicando a senoide. Note que
se σ < 0 (e o polo estiver no semi plano direito do plano s), então a resposta natural irá crescer com o tempo e,
portanto, o sistema será instável. Se σ = 0, a resposta natural não crescerá nem decairá. Neste caso, o sistema é
BIBO estável. Se σ > 0 a resposta decairá e o sistema é BIBO estável (ou assintoticamente estável se não houve
cancelamento de polos e zeros da função de transferência).
Especificações no domı́nio do tempo
Especificações para o projeto de um sistema de controle muitas vezes envolvem certos requisitos associados com a
resposta temporal do sistema. Os requisitos para um resposta à uma entrada do tipo degrau são expressadas em
termos das seguintes definições:
• O tempo de subida tr é o tempo que leva para o sistema alcançar a vizinhança do seu novo valor de regime.
• O tempo de acomodação ts é o tempo que leva para o transiente do sistema decair.
• O sobressinal Mp é a quantidade máxima que o sistema ultrapassa o seu valor final (normalmente expressado
em porcentagem).
• tempo de pico tp é o tempo que leva para o sistema alcançar o ponto de sobressinal.
Tempo de subida
Utiliza-se a seguinte expressão empı́rica para determinar o tempo de subida
tr ≈
1.8
ωn
(5.12)
Sobressinal e tempo de pico
Quando y(t) alcança o valor máximo, sua derivada será zero. Então, a partir de (5.11) obtemos
σ
ẏ(t) =σe−σt cos(ωd t) +
sin(ωd t) − e−σt (−ωd sin(ωd t) + σ cos(ωd t)) = 0
ωd
2
σ
=e−σt
sin(ωd t) + ωd sin(ωd t) = 0
ωd
Isto ocorre quando sin(ωd t) = 0, então ωd tp = π e
tp = π/ωd .
Substituindo o valor de tp na expressão de y(t), obtemos
σ
y(tp ) = 1 + Mp = 1 − e−σπ/ωd cos(π) +
sin(π) = 1 + e−σπ/ωd .
ωd
(5.13)
66
Capı́tulo 5. Aplicações
1
0.8
Mp
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ξ
Figura 5.4: Sobressinal em função de ξ para sistemas de segunda ordem.
Assim, obtemos a formula
Mp = e−πξ/
√
1−ξ 2
,
0 ≤ ξ < 1,
(5.14)
na qual é ilustrada na Figura 5.4.
Tempo de acomodação
O desvio de y para a resposta ao degrau (u(t) = 1) é o produto do decaimento exponencial e−σt e as funções
seno e cosseno. A duração deste desvio é essencialmente decidido pelo transiente da exponencial. Então, podemos
definir o tempo de acomodação de ts quando o decaimento exponencial alcança 5%:
e−ξωn ts = 0.05.
Portanto,
ξωn ts = 3,
ou ainda
ts =
3
3
= .
ξωn
σ
(5.15)
As Equações (5.12)-(5.15) caracterizam a resposta transiente de um sistema sem zeros finitos e com dois
polos complexos com frequência natural não amortecida ωn , coeficiente de amortecimento ξ, e parte real negativa
σ. Em análise e projeto, eles são usados para estimar o tempo de subida, sobressinal, e tempo de acomodação,
respectivamente, para qualquer sistema. Na sı́ntese de controladores desejamos especificar tr , Mp e ts e perguntar
onde os polos precisam estar para que a resposta do sistema seja menor ou igual a essas especificações. Neste caso,
para valores especı́ficos de tr , Mp e ts , teremos
1.8
,
tr
ξ ≥ ξ(Mp ), Veja a Figura 5.4,
3
σ≥ .
ts
ωn ≥
(5.16)
(5.17)
(5.18)
Exemplo 5.11. Encontre a região do plano s para os polos de uma função de transferência de um sistema se os
requisitos de resposta são tr ≤ 0.6 s, Mp ≤ 10% e ts ≤ 3 s.
Sem ter o conhecimento de que o sistema é de segunda ordem escrito na forma (5.10) é impossı́vel encontrar
uma região de maneira precisa. Desconsiderando o sistema, podemos obter uma primeira aproximação usando as
relações para um sistema de segunda ordem. A equação (5.12) indica que 1.8
ωn ≤ 0.6. Rearranjando esta equação
obtemos que
ωn ≥ 3.0 rad/s.
5.8 Resposta temporal de sistemas descritos por função de transferência
67
Figura 5.5: Região do plano s para o Exemplo 2.11.
A Equação (5.14) e a Figura 5.4 indicam que
ξ ≥ 0.6.
De fato,
e−πξ/
⇐⇒ − p
√
1−ξ 2
πξ
1 − ξ2
≤ 0.1
≤ ln(0.1)
π2 ξ2
≥ ln(0.1)2
1 − ξ2
s
ln(0.1)2
≈ 0.6.
⇐⇒ξ ≥
2
π + ln(0.1)2
⇐⇒
Note que nos desenvolvimentos acima foram desconsideradas as soluções negativas, pois ξ ≥ 0.
Por fim, (5.15) indica que σ3 ≤ 3. Logo,
3
σ ≥ = 1 s.
3
A região permitida é dada por qualquer ponto a esquerda das linhas sólidas na Figura 5.5. Note que qualquer
polo satisfazendo as restrições de ξ e ωn irá atender automaticamente as restrições de σ.
Efeitos de pólos e zeros adicionais
As relações descritas na seção anterior estão corretas para sistemas de segunda ordem simples. Para sistemas mais
complicados elas servem apenas como um guia. Se um certo projeto tem um tempo de subida inadequado (muito
lento), devemos aumentar a frequência natural. Se o transiente possui muito sobressinal, então o coeficiente de
amortecimento precisa ser aumentado. Se o transiente for muito longo, os pólos precisam ser movidos para a esquerda
do plano s.
Até agora somente os polos de H entraram na discussão. Podem existir os zeros de H. A nı́vel de análise
transiente, os zeros influenciam nos coeficientes dos termos exponenciais. Para ilustrar este fato, considere as
seguintes funções de transferência, na qual possuem os mesmos polos mas zeros diferentes:
2
2
2
=
−
,
(s + 1)(s + 2)
s+1 s+2
2(s + 1.1)
2
0.1
0.9
0.18
1.64
H2 (s) =
=
+
=
+
.
1.1(s + 1)(s + 2)
1.1 s + 1 s + 2
s+1 s+2
H1 (s) =
Note que o coeficiente do termo (s + 1) foi modificado de 2 em H1 para 0.18 em H2 . Esta redução é dada pelo
zero em s = −1.1 em H2 , que quase cancela o polo em s = −1. Se colocarmos o zero exatamente em s = −1,
este termo desaparecerá completamente. Em geral, um zero perto de um polo reduz magnitude daquele termo na
68
Capı́tulo 5. Aplicações
resposta total. Neste contexto, diversas conclusões podem ser obtidas a partir do padrão de polos e zeros da função
de transferência:
1. Para um sistema de segunda ordem sem zeros finitos, a resposta transiente são dadas pelas equações (5.12)(5.15).
2. Um zero no semi plano direito do plano s irá aumentar o sobressinal se o zero possuir um fator de 4 da parte
real dos polos complexos.
3. Um zero no semi plano direito do plano complexo irá diminuir o sobressinal (e provavelmente fará com que a
resposta ao degrau do sistema comece na direção contrária).
4. Um polo adicional no semi plano esquerdo do plano s irá aumentar o tempo de subida significativamente se o
polo extra possuir um fator de 4 da parte real dos polos complexos.
5.8.3
Exercı́cios
1. Para o sistema de controle apresentado na Figura 5.6, especifique o ganho K para que a saı́da tenha um sobressinal
menor que 10% na resposta para uma entrada do tipo degrau.
Figura 5.6: Sistema de controle do exercı́cio 1.
2. Para o sistema de controle da Figura 5.7, especifique o ganho e o polo do compensador para que o sistema de
malha fechada tenha sobressinal menor que 25% e tempo de acomodação menor que 0.1 s para uma entrada do
tipo degrau.
Figura 5.7: Sistema de controle do exercı́cio 2.
3. Suponha que você deseje que um sistema de segunda ordem possua tempo de pico menor que t0p . Esboce a região
no plano s que corresponde aos valores dos pólos que satisfazem a especificação tp < t0p .
4. A função de transferência de um sistema em malha fechada é dada por
H(s) =
K
.
s(s + 2) + k
Para uma entrada do tipo degrau especificamos um tempo de pico tp = 1 s e sobressinal Mp = 5%.
a) Determine quando ambas especificações podem ser atendidas simultaneamente através da escolha adequada de
K.
b) Desenhe a região no plano s em que ambas as especificações são atendidas.
5. As equações do movimento de um motor CC são dadas por
Kt
Kt Ke
Jm θ̈m + b +
θ̇ =
va ,
Ra
Ra
com Jm = 0.01 kg m2 , b = 0.001 N m s, ke = 0.02 V s, Kt = 0.02 N m/A, Ra = 10Ω.
a) Encontre a função de transferência entre a tensão aplicada, va , e a velocidade do motor, θ̇m .
b) Qual é o estado estacionário da velocidade do motor depois que uma tensão va = 10 V for aplicada?
c) Encontre a função de transferência entre a tensão aplicada e o ângulo θm .
6. Considere o seguinte sistema de segunda ordem com um pólo extra:
H(s) =
ωn2 p
.
(s + p)(s2 + 2ξωn s + ωn2 )
Mostre que a resposta para uma entrada do tipo degrau é
y(t) = 1 + Ae−pt + Be−σt sin(ωd t − θ),
5.8 Resposta temporal de sistemas descritos por função de transferência
69
com
A=
ωn2
−ωn2
,
− 2ξωn p + p2
p
B=p
,
(p2 − 2ξωn p + ωn2 )(1 − ξ 2 )
!
!
p
p
1 − ξ2
1 − ξ2
−1
−1
+ tan
θ = tan
−ξ
p − ξωn
7. Considere os sistemas de fase não mı́nima:
2(s − 1)
,
(s + 1)(s + 2)
3(s − 1)(s − 2)
G2 (s) =
.
(s + 1)(s + 2)(s + 3)
G1 (s) = −
a) Esboce a resposta temporal de G1 e G2 para uma entrada do tipo degrau e analise a parte transiente da resposta.
b) Explique a diferença no comportamento da resposta dos dois sistemas relacionando-a com a localização dos
zeros.
71
Capítulo 6
Resposta em frequência
Neste capı́tulo estudaremos um método para obter a resposta em frequência de um sistema linear contı́nuo e
invariante no tempo.
Uma das principais vantagens de usar a resposta em frequência para análise de sistemas é a facilidade com que
as informações experimentais podem ser usadas. Medições da amplitude e da fase de saı́da de um sitema submetido
a uma excitação de entrada do tipo senoidal são suficientes para construir a resposta em frequência. Outra vantagem
é a facilidade de usar o método para projetar controladores. Simples regras podem ser construı́das para fornecer
projetos com um mı́nimo de tentativa e erro.
6.1
Conceitos básicos
A resposta de um sistema linear para uma entrada do tipo senoidal – chamada de resposta em frequência – pode
ser obtida a partir da localização dos pólos e zeros.
Considere um sistema descrito por
Y (s)
= H(s),
U (s)
na qual a entrada u é uma onda senoidal com amplitude A, ou seja, u(t) = A sin(ω0 t), na qual possui transformada
0
de Laplace U (s) = s2Aω
.
+ω02
Assumindo condição inicial zero, a transformada de Laplace da saı́da é
Y (s) = H(s)
Aω0
.
s2 + ω02
(6.1)
Uma expansão em frações parciais de (6.1) (assumindo que os pólos de h são distintos) resultará em uma equação
da forma
Y (s) =
α1
α2
αn
α0
α0∗
+
+ ··· +
+
+
,
s − p1
s − p2
s − pn
s + jω0
s − jω0
(6.2)
na qual p1 , p2 , . . . , pn são os pólos de H. A resposta no domı́nio do tempo que corresponde a Y (s) é
y(t) = α1 ep1 t + α2 ep2 t + · · · + αn epn t + 2|α0 | sin(ω0 t + φ),
t ≥ 0,
(6.3)
com
φ = tan−1
Im(α0 )
.
Re(α0 )
Se o sistema possui um comportamento estável, então todos os pólos possuem parte real negativa e a resposta
não forçada do sistema irá convergir para zero. Portanto, a resposta de estado estacionário do sistema será dada
pelo termo exponencial de (6.3), que é dada pela excitação senoidal.
A partir da Equação (6.3) podemos verificar que a resposta do sistema em estado estacionário é
y(t) = AM sin(ω0 t + φ),
com
p
M = |H(jω0 )| = |H(s)|s=jω0 = (H(jω0 ))2 + (Im(H(jω0 )))2 ,
Im(α0 )
φ = tan−1
= ∠H(jω0 ),
Re(α0 )
(6.4)
72
Capı́tulo 6. Resposta em frequência
Magnitude (abs)
10
5
Fase (deg)
0
60
30
0
10-2
10-1
100
101
Frequência (rad/s)
102
103
Figura 6.1: Gráfico de magnitude e fase da função de transferência (6.5) para K = 1, T = 1 e α = 0.1.
ou na forma polar,
H(jω0 ) = M ejφ .
A Equação (6.4) mostra que um sistema estável com função de transferência H excitado por uma senoide com
amplitude unitária e frequência ω0 irá, depois que a resposta alcance estado estacionário, exibir uma saı́da senoidal
com uma amplitude M (ω0 ) e fase φ(ω0 ) na frequência ω0 .
6.2
Resposta em frequência de uma função de transferência de primeira ordem
Considere a função de transferência
H(s) =
Ts + 1
,
αT s + 1
α < 1.
(6.5)
Substituindo s = jω na expressão acima, temos
H(jω) = K
T jω + 1
.
αT jω + 1
Segue que
p
M = |D| = |K| p
1 + (ωT )2
1 + (αωT )2
,
e a fase é dada por
φ = ∠(1 + jωT ) − ∠(1 + jαωT ) = tan−1 (ωT ) − tan−1 (αωT ).
(6.6)
Para baixos valores de ω, a amplitude é dada somente por |K| e para frequências altas é dada por |K/α|.
Portanto, a amplitude aumenta em função da frequência. A fase é zero para frequências baixas e volta para zero
para frequências altas. Para valores intermediários de frequência, o calculo de tan−1 (·) revela que φ se torna positiva.
Estas são as caracterı́sticas gerais da função de transferência H dada por (6.5).
O calculo numérico da resposta em frequência de (6.5) para K = 1, T = 1 e α = 0.1 para 0 ≤ ω ≤ 10 é
apresentado na Figura 6.1.
6.3
Resposta em frequência para sistemas de segunda ordem
Considere um sistema que possui a função de transferência
H(s) =
(s/ωn
)2
1
.
+ 2ξ(s/ωn ) + 1
(6.7)
O gráfico de magnitude e fase é apresentado na Figura 6.2 para diferentes valores de ξ e ωn fixado em 1. Note
que o coeficiente de amortecimento influencia no formato da curva de magnitude – o valor máximo do gráfico de
magnitude da resposta em frequência é chamado de pico de ressonância, Mr . Além disso, ωn é aproximadamente
igual à largura de banda – a frequência onde a magnitude começa a cair a partir do seu valor de baixa frequência.
6.4 Técnicas do traçado do gráfico de Bode
73
Magnitude (abs)
101
100
10-1
Fase (deg)
10-2
0
-45
-90
-135
-180
10-1
100
Frequência (rad/s)
101
Figura 6.2: Gráfico de magnitude e fase da função de transferência (6.7) para diferentes valores de ξ e ωn = 1
rad/seg.
6.4
Técnicas do traçado do gráfico de Bode
A ideia do método de Bode é plotar as curvas de magnitude usando uma escala logarı́tmica e as curvas de fase
usando uma escala linear. Esta estratégia nos permite plotar a resposta em frequência de sistemas com função de
transferência de ordem alta através da soma dos termos separadamente. Esta soma é possı́vel por causa que uma
expressão complexa com pólos e zeros pode ser escrita na forma polar como
H(jω) =
r1 ejθ1 r2 ejθ2
r1 r2 j(θ1 +θ2 −θ3 −θ4 −θ5 )
=
e
.
r3 ejθ3 r4 ejθ4 r5 ejθ5
r3 r4 r5
Note, a partir da equação acima, que as fases dos termos individuais são somadas diretamente para obter a fase
da expressão composta H(jω). Além disso, como
|H(jω)| =
r1 r2
,
r3 r4 r5
então
log10 |H(jω)| = log10 r1 + log10 r2 − log10 r3 − log10 r4 − log10 r5 .
Podemos ver que a soma dos logaritmos dos termos individuais fornecem o logaritmo da magnitude da expressão
composta. A resposta em frequência é tipicamente apresentada como duas curvas: o logaritmo da magnitude pelo
logaritmo de ω e a fase pelo logaritmo de ω. Juntos, estes gráficos representam o gráfico de Bode do sistema.
É importante observar que a função de transferência para o traçado do gráfico de Bode deve estar na forma
H(jω) = K
(jωτ1 + 1)(jωτ2 + 1) . . .
,
(jωτa + 1)(jωτb + 1) . . .
(6.8)
porque nesta forma, o ganho K está diretamente relacionada com a magnitude da função de transferência em baixas
frequências.
Todas as funções de transferências que tratamos nesse curso podem ser compostas em três classes de termos:
1. K(jω)n ,
2. (jωτ + 1)±1 ,
±1
2
jω
jω
3.
+ 2ξ ωn + 1
.
ωn
No texto que segue iremos estudar cada um destes termos.
1. Termos do tipo K(jω)n .
Como
log K|(jω)n | = log K + n log |jω|,
então o gráfico de magnitude deste termo será uma linha reta com inclinação n. Exemplos para diferentes valores de
n são apresentados na Figura 6.3. Esta classe de termos afetam somente a inclinação em baixas frequências porque
todos os outros termos serão constantes nessa região.
74
Capı́tulo 6. Resposta em frequência
102
Magnitude (abs)
Inclinação n=2
100
Fase (deg)
10-2
180
90
Inclinação n=-1
Inclinação n=1
n=2
n=1
0
-90
n=-1
10-1
100
Frequência (rad/s)
101
Figura 6.3: Gráfico de magnitude e fase de (jω)n .
A fase de (jω)n é φ = n × 90◦ ; ela é independente da frequência e portanto será uma linha horizontal: −90◦ se
n = −1, −180◦ se n = −2, 90◦ se n = 1 e assim por diante.
2. Termos do tipo (jωτ + 1)±1 .
A magnitude deste termo tende para uma assı́ntota em frequências baixa e para outra assı́ntota em frequências
altas:
• para ωτ 1, (jωτ + 1)±1 ≈ 1,
• para ωτ 1, (jωτ + 1)±1 ≈ jωτ
Se chamarmos ω = 1/τ de ponto de quebra, então veremos que abaixo do ponto de quebra a curva de magnitude
é aproximadamente constante (= 1), enquanto que acima do ponto de quebra o comportamento da curva de
magnitude é aproximadamente igual ao termo (jω)±1 .
A curva de fase também pode ser facilmente desenhada usando as seguintes assı́ntotas:
• para ωτ 1, ∠1 = 0◦ ,
• para ωτ 1, ∠jωτ = 90◦ ,
• para ωτ ≈ 1, ∠(jωτ + 1) ≈ 45◦
±1
2
jω
jω
3. Termos do tipo
+
2ξ
+
1
.
ωn
ωn
Este termo se comporta como o anterior, com a seguinte diferença: o ponto de quebra é agora ω = ωn . A
magnitude muda com inclinação de +2 no ponto de quebra se o termo estiver no numerador, e −2 se o termo
estiver no denominador. A fase muda em ±180◦ , e a transição através do ponto de quebra varia com o coeficiente de
amortecimento ξ. A Figura 6.2 mostra o gráfico de magnitude e fase para diferentes coeficientes de amortecimento
2
jω
para o caso em que o termo
+ 2ξ ωjωn + 1 está no denominador da função de transferência. Note que a
ωn
assintota de magnitude para frequências acima do ponto de quebra possui inclinação de −2 e que a transição através
da região do ponto de quebra possui dependência no coeficiente de amortecimento. Um esboço grosseiro desta
transição pode ser feita notando que
|H(jω)| =
1
,
2ξ
para ω = ωn ,
para esta classe de termos no denominador. Se o termos estiver no numerador, o gráfico de magnitude será a
reciproca da curva mostrada na Figura 6.2.
Não existem regras para esboçar a curva de fase destes termos; entretanto, podemos sempre utilizar a Figura
6.2.
Traçado do gráfico de Bode para sistemas compostos
Quando o sistema possui diversos pólos e zeros, traçar a resposta em frequência requer que os componentes sejam
combinados em uma curva composta. Para traçar a curva de magnitude composta, é útil notar que a inclinação
das assı́ntotas é igual a soma das inclinações das curvas individuais. Portanto, a curva assı́ntota composta possui
6.4 Técnicas do traçado do gráfico de Bode
75
mudanças de inclinação em cada ponto de quebra: +1 para termos de primeira ordem no numerador, −1 para termos
de primeira ordem no denominador, e ±2 para termos de segunda ordem. Além disso, a assı́ntota na frequência mais
baixa possui inclinação determinada pelo valor de n do termo (jω)n . Portanto, o procedimento completo consiste
em traçar a assintota nas frequências baixas e, sequencialmente ir mudando a inclinação da assı́ntota em cada pondo
de quebra de maneira crescente na frequência.
A curva de fases composta é a soma das curvas individuais. Somando as curvas de fase individualmente é feita
localizando as curvas tal que a fase composta se aproxime das curvas individuais. Um rascunho rápido da fase
composta pode ser encontrado começando o gráfico de fase abaixo do menor pondo de quebra e fixando ele em
n × 90◦ . A fase é então incrementada em cada ponto de quebra de maneira crescente na frequência. O valor do
incremento é ±90◦ para um termo de primeira ordem e ±180 para um termo de segunda ordem. Pontos de quebra
no numerador indicam incrementos positivos, enquanto que pontos de quebra no denominador indicam incrementos
negativos na fase.
6.4.1
Resumo das regras para o traçado do gráfico de Bode
1. Manipule a função de transferência para obter a forma (6.8).
2. Determine o valor de n para o termo K(jω)n . Trace a assı́ntota do gráfico de magnitude para baixas frequências
com inclinação n.
3. Complete a composição das assı́ntotas de magnitude: extenda as assı́ntotas de baixa frequência até a primeira
frequência de corte. Então incremente a inclinação para ±1 ou ±2, dependendo dos pontos de quebra.
4. Rascunhe a curva de magnitude aproximada: incremente o valor da assı́ntota por um fator de 1.4 no ponto
de quebra do numerador com termo de primeira ordem, e decresça ela por um fator de 0.707 em um ponto
de quebra de primeira ordem no denominador. Nos pontos de quebra de segunda ordem, rascunhe o pico de
ressonância de acordo com a Figura 6.5 usando a relação |H(jω)| = 1/2ξ no denominador (ou |H(jω)| = 2ξ
no numerador).
5. Trace a assı́ntota de baixa frequência para o gráfico de fase, φ = n × 90◦ .
6. Rascunhe o gráfico de fase aproximado mudando ±90◦ ou 180◦ em cada ponto de quebra em ordem crescente.
Para termos de primeira ordem no numerador, a mudança de fase é +90◦ ; para termos de primeira ordem no
denominador a mudança é −90◦ . Para termos de segunda ordem, a mudança é ±180◦ .
7. Some cada curva de fase graficamente.
Exemplo 6.1. Trace o gráfico de Bode para o sistema com função de transferência
H(s) =
2000(s + 0.5)
.
s(s + 10)(s + 50)
Passo 1. Convertemos a função de transferência para a forma (6.8):
H(jω) =
2[(jω/0.5) + 1]
.
[jω(jω/10) + 1][(jω/50) + 1]
Passo 2. Notamos que o termo em jω é de primeira ordem e está no denominador, então n = −1. Logo, a assı́ntota
para baixas frequências é definida pelo termo
2
.
H(jω) =
jω
Esta assı́ntota é valida para ω < 0.1 porque o menor ponto de quebra está em ω = 0.5. O gráfico de magnitude
deste termo possui inclinação −1 (ou -20 db por década). Localizamos a magnitude passando pelo valor 2 em ω = 1,
mesmo que a curva composta não passe por esse ponto.
Passo 3. Obtemos as assı́ntotas restantes. O primeiro ponto de quebra está em ω = 0.5 e é um termo de primeira
ordem no numerador, portanto o gráfico de magnitude deste termo possui inclinação +1. Em seguida traçamos a
assı́ntota correspondente ao termo de primeira ordem com ponto de quebra em ω = 10 e o termo com ponto de
quebra em ω = 50. O resultado é apresentado na Figura 6.4.
Passo 4. Traçamos a curva composta tal que ela seja aproximadamente tangente à assı́ntota, quando se a fasta
dos pontos de quebra.
2
Passo 5. Como a fase de jω
é -90◦ , o gráfico de fase começa em -90◦ para frequências baixas.
Passo 6. A fase da curva composta é apresentado no gráfico inferior da Figura 6.4.
Capı́tulo 6. Resposta em frequência
Magnitude (abs)
76
Curva composta
100
Fase (deg)
90
0
-90
Curva composta
-180
10-2
10-1
100
101
Frequência (rad/s)
102
103
Magnitude (abs)
Figura 6.4: Gráfico de magnitude e fase da função de transferência H(s) =
2000(s+0.5)
s(s+10)(s+50) .
100
Fase (deg)
10-5
-90
-135
-180
-225
-270
10-1
100
101
Frequência (rad/s)
102
Figura 6.5: Gráfico de magnitude e fase da função de transferência H(s) =
10
1
4 s(s2 /4+0.2s/2+1) .
Exemplo 6.2. Como segundo exemplo, iremos traçar a resposta em frequência do sistema
H(s) =
10
.
s(s2 + 0.4s + 4)
Convertendo a equação acima para a forma (6.8), temos
H(s) =
10
1
.
4 s(s2 /4 + 0.2s/2 + 1)
Começando com a assı́ntota de baixa frequência, temos n = −1 e H(jω) ≈ 2.5
jω . O gráfico de magnitude deste
termo possui inclinação de −1 (ou -20 db por década) e passa pelo valor log 2.5 em ω = 1. Para o termo de segunda
ordem, note que ωn = 2 e ξ = 0.1. Na frequência de quebra dos pólos, ω = 2, a inclinação muda para −3 (-60 db
por década). Além disso, a magnitude no ponto de quebra é log 1/(2ξ). A curva de fase para este caso começa em
−90◦ , correspondendo ao termo 1/s, e decresce para −180◦ em ω = 2 devido ao termo de segunda ordem e depois,
se aproxima de −270◦ para altas frequências. O resultado é apresentado na Figura 6.5.
6.5
Exercı́cios
1. Rascunhe as assı́ntotas do gráfico de Bode para as seguintes funções de transferência. Verifique os resultados no
MATLAB.
6.5 Exercı́cios
77
4000
a) H(s) = s(s+400)
.
100
b) H(s) = s(0.1s+1)(0.5s+1)
.
1
c) H(s) = s(s+1)(0.02s+1) .
s
d) H(s) = (s+1)(s+10)(s
2 +2s+2500) .
4s(s+10)
e) H(s) = (s+100)(4s
2 +5s+4) .
2. (Múltiplos pólos e zeros na origem) Rascunhe as assı́ntotas do gráfico de Bode para cada uma das funções de
transferência. Verifique os resultados no MATLAB.
1
.
a) H(s) = s2 (s+8)
s+3
b) H(s) = s2 (s+8) .
a) H(s) = (s+1)2 s31(s+10)2 .
3. (Pólos reais e complexos conjugados) Rascunhe as assı́ntotas do gráfico de Bode para cada uma das seguintes
funções de transferência. Verifique os resultados no MATLAB.
s+2
a) H(s) = s(s+10)(s
2 +2s+2) .
s+2
b) H(s) = s(s+10)(s2 +6s+25) .
4
+4s+68)
c) H(s) = s2(s+2)(s
(s+10)(s2 +4s+85) .
4. (Pólos e zeros no semiplano direito) Rascunhe as assı́ntotas do gráfico de Bode para cada uma das seguintes
funções de transferência. Verifique os resultados no MATLAB.
s+2
1
a) H(s) = s+10
s2 −1 .
s−1
b) H(s) = (s2 .
s+2
c) H(s) = s(s−1)(s+6)
2.
5. Prove que a inclinação de magnitude de −1 do gráfico de Bode corresponde à -20 db por década.
6. Um sistema de segunda ordem com ξ = 0.5 e um pólo adicional é dado por
H(s) =
1
.
(s/p + 1)(s2 + s + 1)
Trace o gráfico de Bode para p = 0.01, 0.1, 1, 10 e 100. Que conclusões podemos obter sobre o efeito do pólo
extra na largura de banda1 se comparado com a largura de banda para o sistema de segunda ordem sem o pólo
extra?
1 A largura de banda é definida como a frequência máxima em que um sistema irá rastrear uma entrada senoidal de maneira
satisfatória. Por convenção, a largura de banda é considerada como a frequência na qual se aplicarmos uma senoide na entrada, a saı́da
irá ser atenuada por um fator de 0.707 vezes a entrada.
79
Capítulo 7
Transformada Z
Em muitos sistemas discretos, os sinais são considerados para valores discretos de t, usualmente em nT , n = 0, 1, . . . ,
na qual T é um número positivo fixo, usualmente chamado de perı́odo de amostragem. O estudo de tais sistemas
pode ser realizado através do método da transformada Z. Nas próximas seções iremos desenvolver este método e
apresentar suas aplicações.
Definição 7.1. Seja T um número positivo fixo. Seja f (t) definida para t ≥ 0. A transformada Z de f (t) é a função
de variável complexa z dada por
∞
X
Z (f (t)) = F (z) =
f (nT )z −n ,
para |z| > R,
n=0
na qual R é a região de convergência da série.
Observação 7.1. Note que somente os valores de fn = f (nT ) de f em nT são usados, portanto, a transformada Z
é aplicada para a sequência {fn }n∈N .
Observação 7.2. Se f possui uma descontinuidade do tipo pulo em t = nT , iremos interpretar f (nT ) de f (t) para
t → nT + , e iremos assumir a existência desse limite, para n ∈ N.
Exemplo 7.1. A transformada Z de f (t) = 1, para todo t ≥ 0 é dada por
F (z) =
∞
X
f (nT )z −n = 1 + z −1 + z −2 + . . .
n=0
Da teoria de séries, sabemos que
P∞
n=0
rn =
1
1−r ,
se |r| < 1. Aplicando este resultado na expressão acima, temos
F (z) =
1
,
1 − z1
se
1
< 1,
|z|
F (z) =
z
,
z−1
se |z| > 1.
ou ainda,
(7.1)
Exemplo 7.2. A transformada Z de f (t) = t é obtida da seguinte maneira:
F (z) =
∞
X
f (nT )z −n = T z −1 + 2T z −2 + · · · = T z −1 1 + 2z −1 + . . . =
n=0
Tz
,
(z − 1)2
para |z| > 1.
7.1
Existência da transformada Z
A partir da Definição 7.1, temos que a existência da transformada Z é garantida se
|F (z)| ≤
∞
X
|f (nT )|
< ∞,
|z|n
n=0
para algum |z| ≥ 0. Qualquer sinal f que não cresça mais rápido que um sinal exponencial r0n , para r0 ∈ R+ , satisfaz
esta condição. Portanto, se |f (nT )| ≤ r0n , para algum r0 ∈ R+ , então
n
∞ X
r0
1
|F (z)| ≤
=
r0 ,
|z|
1 − |z|
n=0
para |z| > r0 .
80
Capı́tulo 7. Transformada Z
7.1.1
Exercı́cios
1. Encontre a transformada Z de
a) f (t) = δ(t).
b) f (t) = t2 .
c) f (t) = γ t .
d) f (t) = γ t−T u(t − T ).
e) f (t) = tγ t .
f) f (t) = cos(βt).
g) f (t) = sin(βt).
2. Usando a definição, calcule a transformada Z de f (t) = (−1)t (u(t) − u(t − 8T )). Considere
1, se t ≥ 0,
u(t) =
0, se t < 0.
7.2
Propriedades da transformada Z
Linearidade. Se f1 possui transformada Z, Z (f1 (t)), para |z| > r1 , e f2 possui transformada Z, Z (f2 (t)), para
|z| > r2 , então f1 + f2 possui transformada Z para |z| > max{r1 , r2 } e
Z (c1 f1 (t) + c2 f2 (t)) =
∞
X
(c1 f1 (nT ) + c2 f2 (nT ))z −n
n=0
∞
X
= c1
f1 (nT )z −n + c2
n=0
∞
X
f2 (nT )z −n
n=0
= c1 Z (f1 (t)) + c2 Z (f2 (t))
para c1 e c2 arbitrários.
Deslocamento. Se Z (f (t)) = F (z), então Z (f (t + T )) = z(F (z) − f (0)+ ). De fato, por definição
Z (f (t + T )) =
∞
X
f ((n + 1)T )z −n = z
n=0
∞
X
f ((n + 1)T )z −(n+1) = z
n=0
∞
X
f (kT )z −k ,
(7.2)
k=1
na qual k = n + 1. Adicionando e subtraindo f (0+ ) em (7.2) obtemos o resultado:
"∞
#
X
−k
+
Z (f (t + T )) = z
f (kT )z − f (0 ) = z F (z) − f (0+ ) .
k=0
Estendendo esse procedimento, podemos obter o seguinte resultado para qualquer número m inteiro positivo
"
#
m−1
X
m
−k
Z [f (t + mT )] = z
F (z) −
f (kT )z
.
k=0
Também podemos definir a transformada Z para deslocamentos negativos:
"
#
n
X
−n
k
Z (f (t − nT )) = z
F (z) +
f (−kT )z .
k=1
De fato, pela Definição 7.1, temos
Z (f (t − nT )) =
∞
X
∞
X
f ((m − n)T )z −m = z −n
m=0
f ((m − n)T )z −(m−n) .
m=0
Definindo m − n = k, obtemos
Z [f (t − nT )] = z
−n
∞
X
k=−n
"
f (kT )z
−k
=z
−n
∞
X
k=0
f (kT )z
−k
+
n
X
#
f (−kT )z
k=1
Mudança de escala complexa. Se a transformada Z de f é F (z), então
Z (e−at f (t)) = F (eaT z).
k
"
=z
−n
F (z) +
n
X
k=1
#
f (−kT )z
k
.
7.2 Propriedades da transformada Z
81
Esta expressão segue diretamente da Definição 7.1:
Z (e−at f (t)) =
∞
X
e−anT f (nT )z −n =
∞
X
f (nT )(eaT z)−n = F (eaT z).
n
n=0
Valor inicial e final. Duas propriedades da transformada de Z são úteis para determinar o valor de f (t), com t = nT ,
n ∈ N e T um número positivo fixo, quando n → 0 ou quando n → ∞, mesmo que a função não seja conhecida
explicitamente.
Teorema 7.1. Se f possui transformada Z, F (z) = Z (f (t)), então
f (0) = lim f (nT ) = lim F (z)
z→∞
n→0
Demonstração. De fato, pela definição da transformada Z, temos
F (z) =
∞
X
f (nT )z −n = f (0) +
n=0
f (T ) f (2T )
+ ...
+
z
z2
Logo, o valor inicial pode ser obtido através do seguinte limite:
lim F (z) = f (0).
z→∞
Observação 7.3. Se f (0) = 0, então podemos obter f (T ) pelo limite limz→∞ zF (z).
Teorema 7.2. Suponha que f possui transformada Z, F (z) = Z (f (t)), e que o limite limn→∞ f (nT ) existe. Então,
lim f (nT ) = lim (z − 1)F (z),
n→∞
z→1
Demonstração. Note que
Z [f (t + T ) − f (t)] = lim
n
X
n→∞
[f (k + 1)T − f (kT )]z −k .
n=0
A transformada Z do lado esquerdo da equação acima pode ser calculada com o auxı́lio da propriedade do
deslocamento no tempo. Logo,
zF (z) − zf (0) − F (z) = lim
n→∞
n
X
[f (k + 1)T − f (kT )]z −k .
(7.3)
n=0
Fazendo z → 1 em ambos os lados de (7.3) e assumindo que a ordem dos limites pode ser trocada (observe o
lado direito de (7.3)), segue que
n
X
lim (z − 1)F (z) − f (0) = lim
z→1
n→∞
[f (k + 1)T − f (kT )]
n=0
= lim {[f (T ) − f (0)] + [f (2T ) − f (T )] + · · · + [f (n + 1)T ) − f (nT )]
n→∞
= lim [−f (0) + f ((n + 1)T )]}
n→∞
= −f (0) + f (∞).
Portanto,
lim f (nT ) = lim (z − 1)F (z),
n→∞
z→1
se o limite existir.
7.2.1
Exercı́cios
1. Encontre a transformada Z e a região de convergência para os seguintes sinais:
a) f (t) = u(t − mT ), na qual u é a função degrau.
b)f (t) = γ t sin(πt).
c) f (t) = γ t cos(πt).
d) f (t) = γ t sin πt
2 .
82
Capı́tulo 7. Transformada Z
e) f (t) = P
γ t cos πt
2 .
∞
f) f (t) = k=0 22T k δ(t − 2T k).
g) f (t) = γ t−T u(t − T ), na qual u é a função degrau.
h) f (t) = tγ t .
2. Prove que se f possui transformada Z dada por F (z) = Z (f ), então γ t f (t) possui transformada Z igual a F
z
γT
.
3. Prove que se f possui transformada Z dada por F (z) = Z (f ), então tf (t) possui transformada Z igual a
d
−T z dz
F (z).
7.3
Inversa da transformada Z
O sinal discreto f (t) em t = nT , ou f (nT ), pode ser obtido a partir de F (z) através da aplicação da transformada
Z inversa. Este processo é simbolicamente definido por f (nT ) = Z −1 [F (z)], na qual F (z) é a transformada Z de
f (nT ).
Na sequência discutiremos alguns métodos para obter f (nT ) a partir de F (z).
7.3.1
Método da série de potência
Quando F (z) é uma função analı́tica para |z| > R, o valor de f (nT ) pode ser obtido como os coeficientes de z n na
expansão em série de potência de F (z).
Note que da Definição 7.1 temos
F (z) = f (0) + f (T )z −1 + · · · + f (kT )z −k + · · · + f (nT )z −n + . . . .
Percebemos que f (nT ) pode ser interpretado como os coeficientes de z −n e pode ser usado para calcular f em
outros instantes de tempo. Se F (z) é dada por uma razão de dois polinômios em z −1 , os coeficientes f (0), . . . , f (nT )
podem ser obtidos através da divisão de polinômios.
Exemplo 7.3. Considere
F (z) =
7z 3 − 2z 2
z 2 (7z − 2)
= 3
(z − 0.2)(z − 0.5)(z − 1)
z − 1.7z 2 + 0.8z − 0.1
Para obter a expansão em série de potências, dividimos o numerador pelo denominador:
7 + 9.9z −1 + 11.23z −2 + 11.87z −3 + . . .
z 3 − 1.7z 2 + 0.8z − 0.1)7z 3 − 2z 2
7z 3 − 11.9z 2 + 5.6z − 0.7
9.9z 2 − 5.6z + 0.7
9.9z 2 − 16.83z + 7.92 − 0.99z −1
11.23z − 7.22 + 0.99z −1
11.23z − 19.09 + 0.98z −1
11.87 − 7.99z −1
Portanto,
F (z) =
7z 3 − 2z 2
= 7 + 9.9z −1 + 11.23z −2 + 11.87z −3 + . . . .
z 3 − 1.7z 2 + 0.8z − 0.1
Logo, f (0) = 7, f (T ) = 9.9, f (2T ) = 11.23, f (3T ) = 11.87, e assim por diante.
Embora este procedimento forneça f (nT ) diretamente, ele não fornece uma expressão fechada para a solução.
Por esta razão este método é pouco útil, ao menos que se deseje saber alguns termos da sequência de f (nT ).
7.3.2
Expensão em frações parciais
Se F (z) é uma função racional em z e analı́tica, ela pode ser expressa por uma expansão em frações parciais,
F (z) = F1 (z) + F2 (z) + F3 (z) + . . .
A inversa desta equação pode ser obtida como a soma das inversas individuais obtidas da expansão, isto é,
f (nT ) = Z −1 [F (z)] = Z −1 [F1 (z)] + Z −1 [F2 (z)] + . . . .
7.3 Inversa da transformada Z
83
Exemplo 7.4. Encontre a transformada Z inversa de
F (z) =
8z − 19
.
(z − 2)(z − 3)
Expandindo F (z) em frações parciais, temos
F (z) =
5
3z −1
5z −1
3
+
=
z +
z .
z−2 z−3
z−2
z−3
Isto implica que
zF (z) =
3
5
3z
5z
+
=
+
.
z−2 z−3
z−2 z−3
Tomando a transformada Z inversa temos
Z −1 (zF (z)) = f (n + 1) =
32n + 53n , se n ≥ 0,
0,
se n < 0.
O ponto importante para notar aqui é que se f (n + 1) = 0 para n < 0, então precisamos que f (0) = 0. Aplicando
um deslocamento na amostra para obter f (n) temos que
3 n 5 n
2 2 + 3 3 , se n ≥ 0,
f (n) =
0,
se n < 0.
Mas da condição acima, temos que f (0) = 32 + 53 . Portanto, para forçar o requisito de que f (0) = 0, precisamos
somar − 19
6 na equação de f (n + 1), mas somente quando n = 0:
19
− 6 δ(n) + 23 2n + 53 3n , se n ≥ 0,
f (n) =
0,
se n < 0.
Se expandirmos uma função racional F (z) em frações parciais, iremos sempre obter uma resposta que está
atrasada em uma amostra devido à natureza do problema. Esta forma é inconveniente. Preferimos uma forma que
contenha amostras nT ao invés de T (n − 1). Isto sugere utilizarmos uma expansão em frações parciais modificada.
Note que F (z)/z é
F (z)
8z − 19
−19/6
3/2
5/3
=
=
+
+
z
z(z − 2)(z − 3)
z
z−2 z−3
Multiplicando ambos os lados por z, obtemos
F (z) = −
19 3 z
5 z
+
+
.
6
2z−2 3z−3
Logo,
f (n) = −
7.3.3
19
δ(n) +
6
3 n 5 n
2 + 3 .
2
3
Exercı́cios
1. Encontre a transformada Z inversa das seguintes expressões:
a) zz(z−4)
2 −5z+6 .
z−4
b) z2 −5z+6
.
c)
d)
e)
(e−2 −2)z
(z−e−2 )(z−2) .
(z−1)2
z3 .
z(2z+3)
(z−1)(z 2 −5z+6) .
2
z (−2z 2 +8z−7)
(z−1)(z−2)3 .
f)
2. a) Expandindo F (z) em série de potência em z −1 , encontre os três primeiros termos de f (n) se
F (z) =
2z 3 + 13z 2 + z
.
+ 7z 2 + xz + 1
z3
b) Estenda o procedimento usado na parte (a) para encontrar os quatro primeiros termos de f (n) se
F (z) =
2z 4 + 16z 3 + 17z 2 + 3z
z 3 + 7z 2 + 2z + 1
84
Capı́tulo 7. Transformada Z
7.4
Relação entre a transformada de Laplace e a transformada Z
Nesta seção iremos mostrar que sistemas de tempo discreto também podem ser analisados através da transformada
de Laplace. De fato, veremos que a transformada Z é a transformada de Laplace disfarçada e que sistemas de tempo
discreto podem ser analisados como se fossem sistemas de tempo contı́nuo.
Conforme estudamos no Capı́tulo 4, a transformada de Laplace de um sinal f é definida por (4.1). Podemos
obter F (z) diretamente de F (s) através de uma transformação simbolicamente denotada por
F (z) , Z [F (s)].
Nosso propósito nesta seção é mostrar esta relação e desenvolver a transformação necessária para obter a transformada
Z diretamente da transformada de Laplace.
Uma função f (nT ) pode ser considerada como uma soma de pulsos retangulares de área hf (nT ), na qual h é a
largura do retângulo. Tal soma se aproxima de
X
hf (nT )δ(t − nT ),
já que δ(t − nT ) é considerado como o limite de um pulso de área unitária. Assim, para converter f (nT ) em um
trem de pulsos
f (0)δ(t), f (T )δ(t − T ), f (2T )δ(t − 2T ), . . . , f (nT )δ(t − nT ),
um fator de escala 1/h é necessário para fazer a conversão. Portanto, podemos substituir a função amostrada f (nT )
por uma função impulso f ∗ (t), dado o fator de escala. A definição de tal função impulso é dada por
f ∗ (t) = f (t)
∞
X
δ(t − nT ) =
n=0
∞
X
f (nT )δ(t − nT ).
n=0
Tomando a transformada de Laplace desta expressão e usando as propriedades do delta de Dirac:
Z b
δ(t) = 0, se t 6= 0, e
δ(t)dt = 1, a < 0 < b,
a
e
L [δ(t − kT )] =
Z
∞
δ(t − kT )e−st dt = e−kT s ,
0
obtemos
F ∗ (s) = L [f ∗ (t)] =
∞
X
f (nT )e−nT s .
n=0
Esta equação é reconhecida como a transformada Z de f , se substituirmos eT s por z. Portanto, estabelecemos
que
F (z) = F ∗ (s)|s=(1/T ) ln(z) .
Se definirmos
de Laplace:
P∞
n=0
δ(t−nT ) = δT (t), podemos estabelecer uma relação entre a transformada Z e a transformada
F (z)|z=eT s = F ∗ (s) = L [f ∗ (t)] = L [f (t)δT (t)].
Agora iremos discutir a implicação de z = eT s ou s =
plano s é mapeada em z = 1 no plano z. De fato, como
e(
jm2π
T
T
1
T
ln(z). Se s = 0, então z = e0 = 1, isto é, a origem do
) = ejm2π = 1,
para todo m ∈ Z, os pontos s = 0, s = j2π/T , s = −j2π/T , . . . , são mapeados em z = 1. Assim, o mapeamento não
é injetor. Se s = jω, então |z| = |ejωT | = 1 para todo ω. Isto implica que o eixo imaginário do plano s é mapeado
no cı́rculo unitário do plano z. Se s = a = jω, então
|z| = |ea+jω)T | = |eaT ||ejωT | = eaT .
Logo, uma linha vertical no plano s é mapeada em um cı́rculo no plano z com raio eaT . Se a < 0, a linha vertical
está no semi plano esquerdo do plano s e o raio do cı́rculo no plano z é menor que 1; se a > 0, o raio é maior que 1.
Portanto, todo o semi plano esquerdo do plano s é mapeado no interior do cı́rculo unitário no plano z.
85
Capítulo 8
Aplicações
8.1
Equações a diferenças lineares com coeficientes contantes
Considere a seguinte equação a diferenças:
p
X
k=0
ak xn+k =
q
X
bj yn+j ,
(8.1)
j=0
na qual ak , k ∈ {0, 1, . . . , n}, e bj , j ∈ {0, 1, . . . , q}, são constantes, yj é a entrada e é conhecida para todos os valores
de j ≥ 0. Nosso objetivo é encontra xn tal que (8.1) seja satisfeita. Note que xn e yn são funções dependentes de
t = nT . Assuma que T = 1 para todas as discussões neste capı́tulo. Então t = n, na qual n ∈ N e n ≥ 0.
Aplicando a transformada Z em (8.1) obtemos
"
#
q
i−1
i−1
n
X
X
X
X
yi z −j ,
ak X(z) −
xi z −j =
bi z i Y (z) −
k=0
i=0
j=0
k=0
na qual X(z) , Z (xn ), Y (z) , Z (yn ), e xj e yj são as condições iniciais.
Resolvendo a equação acima para X(z) obtemos
P
P
P
Pq
Pp
i−1
q
i−1
−j
i
−j
Y (z) i=0 bi z i + i=0 ai z i
x
z
−
b
z
y
z
j
i
j
j=0
i=0
j=0
Pp
X(z) =
.
i
a
z
i=0 i
A transformada inversa desta expressão, x(n) , Z − (X(z)) pode ser obtida usando expansão em série de
potências, expansão em frações parciais, ou através de uma tabela da transformada Z inversa.
Observação 8.1. Apesar de termos aplicado a propriedade do deslocamento para a direita (avanço no tempo), a
equação (8.1) poderia ter sido deslocada para a esquerda e a propriedade do deslocamento para a esquerda poderia
ter sido usada para obter a transformada Z.
Observação 8.2. A extensão da aplicação da transformada Z para solução de sistemas lineares de equações a diferença
com coeficientes constantes pode ser realizada de maneira similar.
Exemplo 8.1. Resolva
y(n + 2) − 5y(n + 1) + 6y(n) = 3x(n + 1) + 5x(n),
se as condições iniciais são y(−1) = 11/6, y(−2) = 37/36 e a entrada é x(n) = 2−n u(n), na qual u(n) representa o
sinal degrau unitário.
A equação acima está na forma de operador avanço, e o uso da propriedade do deslocamento a direita parece
ser apropriado para resolver esta equação. Entretanto, a expressão desta propriedade requer o conhecimento de y(0),
y(1), . . . , y(N − 1), ao invés das condições iniciais y(−1), y(−2), . . . , y(−n). Este problema pode ser contornado
expressando a equação acima na forma de operador de atraso, ou seja,
y(n) − 5y(n − 1) + 6y(n − 2) = 3x(n − 1) + 5x(n − 2).
(8.2)
Agora podemos aplicar a propriedade do deslocamento à esquerda para obter a transformada Z desta equação.
Note que
Z (y(n)) = Y (z),
1
1
11
Z (y(n − 1)) = Y (z) + y(−1) = Y (z) + , Z (y(n − 2))
z
z
6
=
1
1
1
11 37
Y (z) + y(−1) + y(−2) = 2 Y (z) +
+ .
2
z
z
z
6z
36
86
Capı́tulo 8. Aplicações
Por outro lado, como a entrada é causal, então x(−1) = x(−2) = · · · = x(−n) = 0. Logo,
z
,
z − 0.5
1
1 z
1
Z (x(n − 1)) = X(z) + x(−1) =
=
,
z
z z − 0.5
z − 0.5
1
1
1
Z (x(n − 2)) = 2 X(z) + x(−1) + x(−2) =
.
z
z
z(z − 0.5)
Z (x(n)) =
Substituindo estas expressões em (8.2), obtemos
11
5
6
3
5
1 − + 2 Y (z) − 3 −
=
+
,
z
z
z
z − 0.5 z(z − 0.5)
ou ainda
Y (z) =
z(3z 2 − 9.5z + 10.5)
.
(z − 0.5)(z 2 − 5z + 6)
Aplicando a expansão em frações parciais modificada na expressão acima, temos que
Y (z)
3z 2 − 9.5z + 10.5
=
,
z
(z − 0.5)(z − 2)(z − 3)
7/3
18/5
26/15
−
+
.
=
z − 0.5 z − 2 z − 3
Portanto,
y(n) =
7
18
26
(0.5)n − 2n + 3n .
15
3
5
Este exemplo mostra como é fácil resolver equações a diferenças lineares com coeficientes constantes através da
transformada Z. Este método é geral; ele pode ser usado para resolver uma equação a diferenças ou um conjunto
de equações a diferenças simultâneas de qualquer ordem, desde que as equações sejam lineares e com coeficientes
constantes.
8.1.1
Exercı́cios
1. a) Obtenha a saı́da y(n) de um sistema linear discreto e invariante no tempo especificado pela equação
2y(n + 2) − 3y(n + 1) + y(n) = 4x(n + 2) − 3x(n + 1)
se as condições iniciais forem y(−1) = 0, y(−2) = 1 e a entrada x(n) = y −n u(n), na qual u é o sinal degrau unitário.
b) Determine as componentes de entrada nula e estado nulo da resposta.
2. Resolva o problema anterior se ao invés das condições iniciais y(−1), y(−2) forem dadas as condições auxiliares
y(0) = 3/2 e y(1) = 35/4.
3. Encontre a solução da seguinte equação a diferenças
1
y(n + 2) + y(n) = x(n),
4
na qual x(n) = 3(0.5)n − 2δ(n), y(0) = 2 e y(1) = 1.
4. Resolva a equação a diferenças
8y(n + 2) + 2y(n + 1) − y(n) = 0,
com y(0) = 3 e y(1) = 2.
8.2
Convolução
A convolução de duas funções f1 (n) e f2 (n) é dada pelo somatório de convolução:
f1 (n) ∗ f2 (n) =
∞
X
m−∞
f1 (m)f2 (n − m).
8.3 Função de transferência
87
Teorema 8.1. Se Z (f1 (n)) = F1 (z) e Z (f2 (n)) = F2 (z), então
f1 (n) ∗ f2 (n) = F1 (z)F2 (z).
Demonstração. Esta propriedade é valida para sequências causais e não causais. Por simplicidade, iremos provar o
caso para sequências causais, na qual a soma de convolução é de 0 até ∞.
Note que
!
∞
∞
∞
X
X
X
Z (f1 (n) ∗ f2 (n)) = Z
f1 (m)f2 (n − m) =
z −n
f1 (m)f2 (n − m).
m=0
n=0
m=0
Trocando a ordem do somatório, temos que
Z (f1 (n) ∗ f2 (n)) =
∞ X
∞
X
f2 (n − m)z −m =
m=0 n=0
8.3
∞
X
m=0
f1 (m)
∞
X
f2 (r)z −(r+m) =
r=0
∞
X
f1 (m)z −m
m=0
∞
X
f2 (r)z −r = F1 (z)F2 (z).
r=0
Função de transferência
Sabemos que no domı́nio do tempo a saı́da de um sistema linear discreto e invariante no tempo, para um determinado
sinal de entrada, é representado pelo somatório de convolução (estamos considerando resposta ao estado zero)
y(n) = h(n) ∗ u(n),
na qual h é a resposta ao impulso do sistema e u é o sinal de entrada.
Aplicando o teorema da convolução na expressão acima, temos que
Y (z) = H(z)U (z),
(8.3)
sendo Y (z), U (z) e H(z) a transformada Z da saı́da do sistema, do sinal de entrada e da resposta ao impulso,
respectivamente.
Definição 8.1. A função H(z) em (8.3), definida para a variável complexa z, é chamada de função de transferência
de Y (z) para U (z).
Exemplo 8.2. Considere o seguinte sistema linear discreto e invariante no tempo:
y(n + N ) + a1 y(n + N − 1) + · · · + aN −1 y(n + 1) + aN y(n) = b0 x(n + N ) + · · · + bN −1 x(n + 1) + bN x(n). (8.4)
Assuma que a entrada x(n) é causal, isto é, x(−1) = x(−2) = · · · = x(−N ) = 0. Iremos desenvolver uma
expressão geral para a função de transferência deste sistema. Neste caso, também estamos assumindo que y(−1) =
y(−2) = · · · = y(−N ) = 0 (estado zero).
A equação (8.4) pode ser reescrita na forma de operador de atraso, isto é,
y(n) + a1 y(n − 1) + · · · + aN y(n − N ) = b0 x(n) + b1 x(n − 1) + · · · + bN x(n − N ).
Como y(−r) = x(−r) = 0 para r ∈ {1, 2, . . . , N }, segue que
1
Y (z),
zm
1
Z (x(n − m)) = m X(z)
z
Z (y(n − m)) =
para m ∈ {1, 2, . . . , N }.
A transformada Z do sistema considerado pode ser escrita como
a1
a2
aN b1
b2
bN
1+
+ 2 + · · · + N Y (z) = b0 +
+ 2 + · · · + N X(z),
z
z
z
z
z
z
ou ainda
Y (z) =
b0 z N + b1 z N −1 + · · · + bN −1 z + bN
P (z)
X(z) =
X(z).
z N + a1 z N −1 + · · · + aN −1 z + aN
Q(z)
Exemplo 8.3. Encontre a função de transferência do sistema descrito pela seguinte equação a diferenças:
y(n + 2) + y(n + 1) + 0.16y(n) = x(n + 1) + 0.32x(n).
Usando a propriedade do deslocamento à esquerda e aplicando a transformada Z na expressão acima, temos que
H(z) =
P (z)
z + 0.32
= 2
.
Q(z)
z + z + 0.16
88
8.3.1
Capı́tulo 8. Aplicações
Pólos e zeros
Considere uma função de transferência racional descrita pela razão de dois polinômios em z,
H(z) =
b0 z m + b1 z m−1 + · · · + bm−1 z + bm
.
z n + a1 z n−1 + · · · + an−1 z + an
(8.5)
Definição 8.2. As raı́zes do numerador de (8.5), z1 , z2 , . . . , zm são chamados zeros (finitos) do sistema. Note que
a função de transferência é zero quando z = zi , para i ∈ {1, . . . , m}.
Definição 8.3. As raı́zes do denominador de (5.8), p1 , p2 , . . . , pn são chamados de pólos do sistema. A magnitude
da função de transferência tende a infinito quando z → pi , para i ∈ {1, . . . , n}.
8.3.2
Exercı́cios
1. Determine a resposta de estado nulo de um sistema linear discreto e invariante no tempo com função de
transferência
H(z) =
z
(z + 0.2)(z − 0.8)
e o sinal de entrada en+1 u(n), na qual u(n) é o sinal degrau unitário.
2. Determine a resposta ao impulso unitário dos seguintes sistemas descritos pelas equações:
a) y(n) + 3y(n − 1) + 2y(n − 2) = x(n) + 3x(n − 1) + 3x(n − 2).
b) y(n + 2) + 2y(n + 1) + y(n) = 2x(n + 2) − x(n + 1).
c) y(n) − y(n − 1) + 0.5y(n − 2) = x(n) + 2x(n − 1).
−3
3. Calcule a resposta ao impulso dos seguintes sistemas a)H(z) = zz2 −1 .
1
.
b) H(z) = z2 −4z+8
8.4
8.4.1
Estabilidade
Estabilidade BIBO
Um sistema linear discreto e invariante no tempo é dito BIBO estável se toda sequência de entrada limitada induz
a ma saı́da limitada. A condição para um sistema com função de transferência H(z) ser BIBO estável é que todos
os pólos de H(z) estejam dentro do cı́rculo unitário do plano z ou de maneira equivalente, que possuam magnitude
menor que 1. Esta condição pode ser deduzida a partir do caso de tempo contı́nuo, onde a estabilidade BIBO requer
que todos os pólos da função de transferência estejam no semi plano esquerdo do plano s. Como z = esT mapeia o
semi plano esquerdo no interior do cı́rculo unitário do plano z, a estabilidade BIBO discreta requer que todos os
pólos estejam dentro do circulo unitário do plano z.
8.4.2
Estabilidade interna
Para finalizar esta seção, apresentamos na Figura 8.1 a resposta no tempo de alguns pólos. Se um pólo simples
ou repetido está dentro do circulo unitário do plano z, sua resposta no tempo tenderá a zero quando n → ∞. Se
um pólo simples ou repetido está fora do circulo unitário, sua resposta será instável. A resposta temporal de um
pólo em z = 1 é uma constante; a resposta temporal de um pólo simples complexo conjugado no circulo unitário
será uma oscilação sustentada. A resposta temporal de um pólo complexo conjugado repetido no circulo unitário
tenderá a infinito quando n → ∞. Em suma, a resposta temporal de um pólo simples ou repetido tenderá a zero se
e somente se o pólo está dentro do circulo unitário.
8.4.3
Exercı́cios
1. Para a resposta ao impulso h(n) = (−1 + (0.5)n ), determine o número de polos do sistema, se os polos são reais
ou complexos e se o sistema é BIBO estável ou não.
8.4 Estabilidade
89
Figura 8.1: Resposta temporal para sistemas com diferentes pólos.
91
Capítulo 9
Resposta em frequência
Uma senoide de tempo discreto possui a forma
x(n) = cos(Ω0 n + θ0 ),
(9.1)
na qual Ω0 é a frequência angular da senoide, medida em radianos por amostra (ω0 é o número de radianos na qual
o argumento do cosseno aumenta quando n aumenta em 1 amostra).
Note que a menor taxa de variação possı́vel para um sinal de tempo discreto é quando ele é constante, e isto
corresponde, para o caso de sinais senoidais, em fixar a frequência Ω0 em 0. No outro extremo, a maior taxa de
variação possı́vel para um sinal de tempo discreto é quando o seu sinal alterna em todo passo de tempo, como em
(−1)n . Uma senoide com esta propriedade é obtida tomando Ω0 = ±π, pois cos(±πn)(−1)n . Portanto, todas as
ações de senoides com tempo discreto acontecem na faixa de frequência [−π, π]. Fora desse intervalo tudo acontece
periodicamente em Ω0 .
Pode ser útil considerar esta senoide de tempo discreto a partir de uma senoide de tempo contı́nuo cos(ω0 t + θ0 )
de perı́odo 2π/ω0 , amostrando em tempos t = nT que são múltiplos inteiros de algum perı́odo de amostragem
T . Escrevendo cos(ω0 n + θ0 ) = cos(ω0 nT + θ0 ), temos a relação Ω0 = ω0 T (com a resctrição |ω0 | ≤ πT , para
que |Ω0 | ≤ π). Neste caso é natural pensar que 2π/(ω0 T ) = 2π/Ω0 como o perı́odo da senoide de tempo discreto,
medidas em amostras. Entretanto, 2π/Ω0 pode não ser um inteiro.
Se 2π/Ω0 = P/Q para algum inteiro P e Q, isto é, 2π/Ω0 é racional, então de fato x(n + P ) = x(n) para o
sinal em (9.1). Por outro lado, se 2π/Ω0 é irracional, o sinal em (9.1) não será periódico: não haverá inteiro P tal
que x(n + P ) = x(n) para todo n. Por exemplo, cos(3πn, 4) possui frequência 3π/4 radianos por amostra e um
perı́odo de 8, pois 2π/3π/4 = 8/3 = P/Q, portanto, o perı́odo, P , é 8. Por outro lado, cos(3n/4) possui frequência
3/4 radianos por amostra, e não é um sinal periódico discreto por que 2π/3/8π/3 é irracional.
9.1
Exponenciais complexas
A relação entre exponenciais complexas e senoides é dada pela identidade de Euler
ejφ = cos(φ) + j sin(φ),
√
na qual j = −1. Note que ejφ representa um número complexo que possui componente real cos(φ) e componente
imaginário sin(φ). Ele possui magnitude 1 e possui ângulo φ com o eixo real positivo.
Um
√ número complexo c = a + jb pode ser pensado como um ponto (a, b) no plano, e possui magnitude
|c| = a2 + b2 e ângulo com o eixo real positivo de ∠c = arctan(b/a).
Diversas outras identidades seguem da identidade de Euler. As mais importantes são
cos(φ) =
9.2
1 jφ
e + e−jφ ,
2
sin(φ) =
j −jφ
e
− ejφ .
2
Resposta em frequência
Agora estamos em posição de determinar o que um sistema discreto linear e invariante no tempo faz com uma
entrada senoidal. A análise envolve considerar uma entrada complexa na forma x(n) = ej (Ω0 n + θ0 ) ao invés de
x(n) = cos(Ω0 n + θ0 ). Os calculos associados com a convolução de sinais complexo funciona da mesma maneira
que sinais reais, mas a exponencial complexa torna o trabalho mais fácil e o resultado de sinais senoidais reais que
estamos interessado pode ser extraı́do usando identidades trigonométricas.
92
Capı́tulo 9. Resposta em frequência
A abordagem direta resulta em
y(n) =
=
∞
X
m−∞
∞
X
h(m)x(n − m)
h(m) cos(σ0 (n − m) + θ0 )
m−∞
=
∞
X
∞
X
!
h(m) cos(Ω0 m) cos(Ω0 n + θ0 ) +
m−∞
!
h(m) sin(Ω0 m) sin(Ω0 n + θ0 )
m−∞
= C(Ω0 cos(Ω0 n + θ0 )) + S(Ω0 ) sin(Ω0 n + θ0 ),
na qual definimos
C(Ω) =
∞
X
h(m) cos(Ωm),
S(Ω) =
m−∞
∞
X
h(m) sin(Ωm).
m−∞
Agora, defina
H(Ω) = C(Ω) − jS(Ω) = |H(Ω)|ej∠H(Ω) ,
na qual iremos chamar de resposta em frequência do sistema. Usando esta definição temos que
y(n) = |H(Ω0 )| [cos(∠H(Ω0 )) cos(Ω0 n + θ0 ) − sin(∠H(Ω0 )) sin(Ω0 n + θ0 )] = |H(Ω0 )| cos(Ω0 n + θ0 + ∠H(Ω0 )).
Este resultado mostra que o efeito de uma entrada senoidal com frequência Ω0 em um sistema discreto linear e
invariante no tempo pode ser deduzida da resposta em frequência calculada na frequência Ω0 .
9.2.1
Sistemas de primeira e de segunda ordem
Nesta seção, iremos examinar as propriedades de sistemas lineares discretos e invariantes no tempo de primeira
e segunda ordem. De maneira similar ao caso contı́nuo, qualquer sistema com resposta em frequência dada pela
razão de polinômios em e−jΩ pode ser escrito como o produto da soma de sistemas de primeira e segunda ordem,
implicando que estes sistemas básicos são de valor considerável na análise de sistemas complexos.
Sistemas de tempo discreto de primeira ordem
Considere um sistema linear discreto e invariante no tempo descrito pela seguinte função de transferência:
H(z) =
z
.
z−a
A resposta em frequência deste sistema é dada por
H(ejΩ ) =
1
.
1 − ae−jΩ
(9.2)
A magnitude do parâmetro a desempenha um papel similar à constante de tempo τ de sistemas de primeira
ordem de tempo contı́nuo. A magnitude e fase da resposta em frequência de sistemas de primeira ordem são
|H(ejΩ )| =
(1 +
a2
∠H(e ) = − tan
−1
1
− 2a cos(Ω))1/2
e
jΩ
a sin(Ω)
1 − a cos(Ω)
.
Na Figura 9.1 apresentamos o gráfico de magnitude e fase da resposta em frequência do sistema (9.2) para
diversos valores de a > 0. O caso de a < 0 é apresentado na Figura 9.2. A partir destas figuras, podemos ver que
para a > 0, o sistema atenua altas frequências (isto é, |H| é menor para Ω próximo de ±π do que para Ω próximo
de 0), enquanto que para a < 0 o sistema amplifica altas frequências e atenua baixas frequências. Além disso, note
que para |a| pequeno, os valores máximos e mı́nimos, 1/(1 + a) e 1/(1 − a), de |H| são próximos nos valores. Por
outro lado, para valores de |a| próximos de 1, estes valores diferem significantemente, e consequentemente |H| é
nitidamente mais pontudo, providenciando a filtragem e amplificação seletiva sobre uma faixa de frequências.
9.3 Resposta em frequência a partir da posição dos polos e zeros
93
8
1.5
1
6
0.5
4
0
-0.5
2
-1
0
-1.5
-3
-2
-1
0
1
2
3
-3
-2
-1
0
1
2
3
Figura 9.1: Resposta em frequência do sistema (9.2) considerando a > 0.
Sistemas de tempo discreto de segunda ordem
Considere o seguinte sistema linear discreto e invariante no tempo:
H(z) =
z2
,
z 2 − 2r cos(θ)z + r2
com 0 < r < 1 e 0 ≤ θ ≤ π. A resposta em frequência deste sistema é
H(ejΩ ) =
1
.
1 − 2r cos(θ)e−jΩ + r2 e−j2Ω
(9.3)
O denominador de H pode ser fatorado para obter
H(ejΩ ) =
1
.
(1 − rejθ e−jΩ )(1 − re−jθ e−jΩ )
Note que para θ 6= 0 ou θ =
6 π , os dois fatores no denominador de H são diferentes.
A resposta em frequência deste sistema para diferentes valores de r e θ = π/4 é apresentado na Figura 9.3.
9.3
Resposta em frequência a partir da posição dos polos e zeros
Tal como em sistemas de tempo contı́nuo, é possı́vel determinar a resposta em amplitude e fase de um sistema de
tempo discreto a partir da posição dos polos e zeros da função de transferência H(z). Considere a seguinte função
de transferência genérica H(z) de ordem N na forma fatorada:
H(z) = b0
(z − z1 )(z − z2 ) . . . (z − zN )
(z − p1 )(z − p2 ) . . . (z − pN )
Para calcular a resposta em frequência H(ejΩ ) calculamos H(z) para z = ejΩ . Mas para z = ejΩ , |z| = 1 e
∠z = Ω. Portanto, z = ejΩ representa um ponto no cı́rculo unitário com ângulo Ω com o eixo horizontal. Conectamos
8
1.5
1
6
0.5
4
0
-0.5
2
-1
0
-1.5
-3
-2
-1
0
1
2
3
-3
-2
-1
0
1
Figura 9.2: Resposta em frequência do sistema (9.2) considerando a < 0.
2
3
94
Capı́tulo 9. Resposta em frequência
todos os zeros (z1 , z2 , . . . , zN ) e todos os pólos (p1 , p2 , . . . , pN ) ao ponto ejΩ . Sejam r1 , r2 , . . . , rN os comprimentos
e φ1 , φ2 , . . . , φN os ângulos, respectivamente, das linhas conectando z1 , z2 , . . . , zN ao ponto ejΩ . Similarmente,
sejam d1 , d2 , . . . , dN os comprimentos e θ1 , θ2 , . . . , θN os ângulos, respectivamente, das linhas conectando p1 , p2 ,
. . . , pN ao ponto ejΩ . Então,
H(ejΩ ) = H(z)|z=ejΩ = b0
r1 r2 . . . rN j(φ1 +φ2 +···+φN )−(θ1 +θ2 +···+θN )
(r1 ejφ1 )(r2 ejφ2 ) . . . (rN ejφN )
= b0
e
.
(d1 ejθ1 )(d2 ejθ2 ) . . . (dN ejθN )
d1 d2 . . . dN
Portanto,
|H(ejΩ )| = |b0 |
r1 r2 . . . rN
d1 d2 . . . dN
e
∠H(ejΩ ) = (φ1 + φ2 + · · · + φN ) − (θ1 + θ2 + · · · + θN ).
Desta forma, podemos calcular a resposta em frequência de H para qualquer valor de Ω selecionando o ponto
no cı́rculo unitário no ângulo Ω. Este ponto é ejΩ . Para calcular a resposta em frequência de H, conectamos todos
os pólos e zeros a este ponto e utilizamos as equações anteriores para determinarmos |H| e ∠H. Repetimos este
procedimento para todos os valores de Ω, de 0 a π obtendo a resposta em frequência.
9.3.1
Exercı́cios
1. Determine a resposta em amplitude e fase dos sistemas mostrados na Figura 9.4.
2. As relações de entrada-saı́da de dois filtros são dadas por
a) y(n) = −0.9y(n − 1) + x(n)
b) y(n) = 0.9y(n − 1) + x(n)
Para cada caso, determine a função de transferência, a resposta em amplitude e a resposta de fase.
3. Para um sistema linear discreto e invariante no tempo especificado pela equação
y(n + 1) − 0.5y(n) = x(n + 1) + 0.8x(n)
a) Determine a resposta em amplitude e fase.
b) Determine a resposta y(n) do sistema para a entrada x(n) = cos(0.5n − π/3).
9.4
Aliasing e taxa de amostragem
A não unicidade de senoides em tempo discreto e a repetição periódicas das mesmas formas de onda em intervalos
de 2π pode resultar em um problema no processamento de sinais em tempo contı́nuo por sistemas digitais. Uma
senoide cos(ωt), em tempo contı́nuo, amostrada a cada T segundos (t = nT ) resulta em uma senoide cos(ωnT ),
em tempo discreto, na qual é cos(Ωn), com Omega = ωT . As senoides de tempo discreto possuem uma única
forma de onda apenas para valores de frequência na faixa Ω < π ou ωT < π. Portanto, amostras de senoides em
tempo contı́nuo de duas frequências diferentes podem gerar o mesmo sinal em tempo discreto. Este fenômeno é
chamado de aliasing, pois em função da amostragem, duas senoides analógicas totalmente diferentes assumem a
mesma identidade em tempo discreto.
O aliasing causa ambiguidade no processamento digital de sinais, tornando impossı́vel determinar a verdadeira
frequência do sinal amostrado. Considere, por exemplo, o processamento digital de um sinal em tempo contı́nuo que
3.5
1.5
3
1
2.5
0.5
2
0
1.5
1
-0.5
0.5
-1
0
-3
-2
-1
0
1
2
3
-1.5
-3
-2
-1
0
1
Figura 9.3: Resposta em frequência do sistema (9.2) considerando θ = π/4.
2
3
9.4 Aliasing e taxa de amostragem
95
Figura 9.4: Diagrama dos sistemas para o problema 1.
contém duas componentes de frequências distintas, ω1 e ω2 . As amostras destas componentes aparecem como senoides
em tempo discreto com frequências, Ω1 = ω1 T e Ω2 = ω2 T . Se Ω1 e Ω2 forem diferentes por um múltiplo inteiro de
2π, as duas frequências serão lidas como se fossem a mesma frequência pelo processador digital. Como resultado, a
componente de mais alta frequência ω2 não apenas estará perdida para sempre (perdendo sua identidade para ω1 ),
mas reencarnará como uma componente de frequência ω1 , distorcendo a verdadeira amplitude da componente original
de frequência ω1 . Logo, o sinal processado resultante estará distorcido. Claramente, o aliasing é altamente indesejado
e deve ser evitado. Para evitar o aliasing, as frequências das senoides em tempo contı́nuo a serem processadas devem
ser mantidas dentro da faixa fundamental ωT < π. entro dessa condição, a questão de ambiguidade ou aliasing
desaparece porque qualquer senoide em tempo contı́nuo de frequência nesta faixa possui uma única forma de onda
quando amostrada. Portanto, se ωh é a a mais alta frequência a ser processada, então, para evitar o aliasing,
ωh <
π
.
T
Se fh é a mais alta frequência em hertz, fh = ωh /2π e, de acordo com a equação anterior, temos
fh <
1
.
2T
Esta equação mostra que o processamento de sinais em tempo discreto limita a frequência mais alta, fh , pode
ser processada para um dado valor de intervalo de amostragem T , de acordo com a expressão acima.
Podemos processar um sinal de qualquer frequência escolhendo um valor adequado de T de acordo com a seguinte
expressão:
1
T <
.
2fh
A taxa ou frequência de amostragem fs é recı́proca ao intervalo de amostragem T e, portanto,
fs =
1
> 2fh ,
T
tal que
fs
.
2
Este resultado é um caso especial do conhecido teorema da amostragem:
fh <
Teorema 9.1. Seja um sinal, limitado em banda, e seu intervalo de tempo dividido em partes iguais, de forma que
se obtenham intervalos tais que, cada subdivisão compreenda um intervalo com perı́odo T segundos, na qual T é
menor do que 1/2 ∗ fh , na qual fh é a maior frequência do sinal em questão, e se uma amostra instantânea é tomada
arbitrariamente de cada subintervalo, então o conhecimento da amplitude instantânea de cada amostra somado ao
conhecimento dos instantes em que é tomada a amostra de cada subintervalo contém toda a informação do sinal
original.
Este resultado afirma que para processar uma senoide em tempo contı́nuo por um sistema em tempo discreto, a
taxa de amostragem deve ser maior do que duas vezes a frequência (em hertz) da senoide. Ou seja, uma senoide
amostrada deve ter no mı́nimo duas amostras por ciclo. Para taxas de amostragem abaixo desse valor mı́nimo, o
sinal de saı́da terá o efeito de aliasing, significando que ele será confundido com uma senoide de frequência mais
baixa.
96
Capı́tulo 9. Resposta em frequência
Figura 9.5: Sistema de controle discreto.
9.4.1
Exercı́cios
1. a) Um filtro digital possui intervalo de amostragem T = 0.5µs. Determine a frequência mais alta que pode ser
processada por este filtro sem aliasing.
b) Se a frequência mais alta a ser processada é 50kHz, determine o valor mı́nimo da frequência de amostragem fs e
o valor máximo do intervalo de amostragem T que pode ser utilizado.
9.5
Projeto de sistemas discretos
Nesta seção discutiremos sobre a transformação de sistemas de controle contı́nuos para digitais. Para isso, iremos
considerar o diagrama de controle apresentado na Figura 9.5. Além disso, estaremos assumindo que C(s), a função
de transferência contı́nua do controlador, e H(s), a função de transferência do sistema, são dadas por razões de
polinômios.
9.5.1
Discretização de controladores contı́nuos
Método da invariância ao impulso
Considere um controlador analógico com uma função de transferência estritamente própria. Se a entrada de C(s) é
um impulso, então a saı́da será
U (s) = C(s) · 1 = C(s).
A transformada Z da resposta ao impulso resulta em um controlador discreto com função de transferência
C(z) = Z L −1 (C(s))t=nT
Exemplo 9.1. Considere um controlador contı́nuo com função de transferência
C(s) =
2(s − 2)
.
(s + 1)(s + 3)
Para encontrar sua resposta ao impulso, expandimos sua expressão em frações parciais:
C(s) =
5
3
−
.
s+3 s+1
Aplicando a transformada inversa de Laplace na expressão acima, fazendo t = nT e tomando a transformada Z
da expressão resultante, temos que
z
z
C(z) = T 5
−
3
.
z − e−3T
z − e−T
Note que o controlador depende do perı́odo de amostragem. Diferentes perı́odos de amostragem resultam em
diferentes controladores. Por exemplo, se T = 0.5, então
C(z) =
0.5z(2z − 2.366)
.
(z − 0.223)(z − 0.607)
Método da invariância ao degrau
Considere um controlador contı́nuo com função de transferência C(s). Iremos desenvolver um controlador digital
C(z) na qual a resposta ao degrau iguala as amostras da resposta ao degrau de C(s). A transformada de Laplace
z
da função degrau unitário é 1s ; a transformada z do degrau unitário discreto é z−1
. Portanto, a resposta ao degrau
de ambos sistemas nos domı́nios transformados são
1
C(s) ,
s
e,
C(z)
z
.
z−1
9.5 Projeto de sistemas discretos
97
Se as respostas são iguais nos perı́odos de amostragem, então
z
1
Z −1 C(z)
= L −1 C(s)
z−1
s t=nT
ou ainda
C(z) =
z−1
1
Z L −1 C(s)
z
s t=nT
Exemplo 9.2. Encontre a expressão digital, a partir do método da invariância ao degrau, do seguinte controlador:
C(s) =
2(s − 2)
.
(s + 1)(s + 3)
Note que
C(s)
2(s − 2)
4
3
5
=
=− +
−
s
s(s + 1)(s + 3)
3s s + 1 3(s + 3)
Tomando a transformada de Laplace inversa na expressão acima, fazendo t = nT e calculando a transformada
Z da expressão resultante, temos que
C(s)
4z
3z
5z
Z
=−
+
−
,
s
3(z − 1) z − eT
3(z − e−3T )
ou ainda
Z
z (9e−T − 5e−3 T − 4)z − (4e−4T − 9e−3T + 5e−T )
C(s)
=
.
s
3(z − 1)(z − e−T )(z − e−3T )
Se o perı́odo de amostragem for T = 0.5, então a expressão do controlador será
C(z) =
9.5.2
0.116z − 0.523
.
z 2 − 0.83z + 0.135
Sistemas digitais equivalentes
Como visto nas seções anteriores, controladores digitais são obtidos através da discretização do controlador analógico.
Nesta seção iremos discutir como obter um modelo equivalente digital de um sistema contı́nuo.
Em controle digital, um controlador digital gera uma sequência de números (um sinal digital). Este sinal digital
é então transformado em um sinal analógico para comandar o sistema analógico. Existem diversas maneiras de
mudar este sinal digital em um analógico. Se um número é mantido constante até a chegada do próximo número,
a conversão é chamada de segurador de ordem zero. Se um número é extrapolado usando a variação do número
com seu valor anterior, a conversão é chamada de segurador de primeira ordem. Claramente, seguradores de ordem
superior também são possı́vel. Entretanto, o segurador de ordem zero é o mais utilizado.
A transformada de Laplace de um pulso p(t) com altura 1 e comprimento T é dada por
1
(1 − e−sT ).
s
Se a saı́da do segurador de ordem zero é 1, então a saı́da é p(t). Portanto, o segurador de ordem zero pode ser
considerado pela seguinte função de transferência
Hsoz (s) =
1 − e−sT
.
s
Em controle digital, um sistema é sempre conectado com um segurador de ordem zero e portanto, a função de
transferência do sistema com o segurador de ordem zero é
1 − e−sT
H̄(s).
s
A saı́da y(t) do sistema com o segurador é um sinal analógico. Se adicionarmos um conversor A/D depois
do sistema, então a saı́da será y(nT ). Se considerarmos y(nT ) como a saı́da e u(nT ) a entrada, então o sistema
analógico e o segurador podem ser modelados como um sistema digital com a seguinte função de transferência:
H̄(s)
H̄(s)
H̄(s)
H(z) = Z (1 − e−T s )
=Z
− Z e−T s
,
s
s
s
98
Capı́tulo 9. Resposta em frequência
Como e−T s introduz apenas um atraso, podemos movê-lo na expressão acima:
H̄(s)
−T s H̄(s)
−T s
Z e
− =e
.
Z
s
s
Usando z = eT s , temos
H(z) = (1 − z
−1
)Z
H̄(s)
z−1
H̄(s)
=
Z
.
s
z
s
(9.4)
Exemplo 9.3. Considere um sistema representado pela seguinte função de transferência contı́nua
H(s) =
s2
101
.
+ 2s + 101
Seu equivalente discreto é dado por
z−1
1
s+1
1
H(z) =
Z
−
−
z
s (s + 1)2 + 100 (s + 2)2 + 100
z−1
ze−T sin(10T )
z
z 2 − ze−T cos(10T )
=
−
−
.
z
z − 1 z 2 − 2ze−T cos(10T ) + e−2T
10(z 2 − 2ze−T cos(10T ) + e−2T )
9.5.3
Exercı́cios
1. Encontre o controlador discreto através do método da invariância ao impulso e invariância ao degrau dos seguintes
controladores contı́nuos considerando T = 1 e T = 0.5:
2
a) C(s) = (s+2)(s+4)
.
2s−3
b) C(s) = s+4 .
2. Encontre o equivalente digital dos seguintes sistemas:
a) H(s) = s12 .
10
b)H(s) = s(s+2)
.
8
c) H(s) = s(s+4)(s−2) .
3. Considere um sistema com função de transferência
H(s) =
1
.
s(s + 1 + 10j)(s + 1 − 10j)
Encontre seu equivalente digital para T = 0.2π e T = 0.1. Ambas podem ser usadas para projeto?