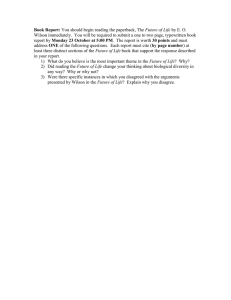
2014 Texas Instruments Motor Control Training Series -Vth Dave Wilson Maximum Torque Per Amp (MTPA) Newton-Meters Maximum torque per amp (MTPA) 200 V (t r e a c t i o n ) 2 00 V 150 1 50 V Simulated Reactance Torque as a function of angle delta from 2005 Prius Traction Motor 100 1 00 V 50 5 0V 0 0V -50 -5 0 V -100 -1 0 0 V -150 -1 5 0 V -200 -180o -2 0 0 V 0 .0 s Dave Wilson 0 .3 s -150o 0 .6 s -120o 0 .9 s -90o 1 .2 s -60o 1 .5 s -30o 1 .8 s 0o 2 .1 s 30o 2 .4 s 60o 2 .7 s 90o 3 .0 s 120o 3 .3 s 150o 3 .6 s 180o TI Spins Motors…Smarter, Safer, Greener. Field Oriented Control in Real Time Low Torque Medium Torque High Torque A B Interrupt: Measure rotor flux angle Regulate current vector to be 90o wrt rotor flux Exit ISR C Interrupt: Measure new rotor flux angle Regulate current vector to be 90o wrt rotor flux Exit ISR Currents Constant Constant (for now) 3P Torque dr I qs 22 † Interrupt: Measure new rotor flux angle Regulate current vector to be 90o wrt rotor flux Exit ISR † Adjustable Torque expression based on amplitude invariant form of Clarke Transform. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Establishing Space Vector Conventions +b Direction of positive rotation Direction of positive speed Direction of positive torque B A -a Phase A leads phase B Phase B leads phase C Phase C leads phase A C -b Dave Wilson +a Motor shaft axis TI Spins Motors…Smarter, Safer, Greener. How Do You Control Torque on a DC Motor? 3 2 Error Signal Desired Current + PI Controller PWM 1 Measured Current Brush DC Motor 4 Power Stage Texas Instruments Dave’s Motor Control Center ADC1 Commutator keeps rotor and stator fields properly aligned! 1. Measure current already flowing in the motor. 2. Compare the measured current with the desired current, and generate an error signal. 3. Amplify the error signal to generate a correction voltage. 4. Modulate the correction voltage onto the motor terminals. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 1. Measure currents already flowing in the motor. Only 2 phases are measured! WHY? A, B, and C axes are “fixed” with respect to the motor housing. This reference frame is also called the “stationary frame” or “stator frame”. ib net current vector ia B i c (implied) A Texas Instruments B ib Dave’s Motor Control Center ic C Controller with A/D Dave Wilson ia ib ic ia C TI Spins Motors…Smarter, Safer, Greener. A 2. Compare the measured current (vector) with the desired current (vector), and generate error signals. Commanded The desired phase currents can be calculated via these equations: is Error is B ic ia = -Im sin(q) ib ib = -Im sin(q - 120 o) ia ic = -Im sin(q - 240 o) C Im is proportional to motor torque q is the angle of the rotor flux So how do we get the rotor flux angle? Dave Wilson TI Spins Motors…Smarter, Safer, Greener. A 2. Compare the measured current (vector) with the desired current (vector), and generate error signals. q or qd Magnetic axis for phase A Usually accomplished with a resolver or encoder. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 2. Compare the measured current (vector) with the desired current (vector), and generate error signals. The CLARKE transform allows us to convert three vectors into two orthogonal vectors that produce the same net vector. ib is B ic ib In other words, convert a 3-phase motor into a 2-phase motor. i a ia C Forward Clarke A B C aA b Dave Wilson B - C A This is the Amplitude Invariant form of the Clarke Transform a b 3 TI Spins Motors…Smarter, Safer, Greener. Stationary Frame Servo b q r rCos(q) -r Tracking a rotating reference signal from a stationary frame is tedious! Dave Wilson TI Spins Motors…Smarter, Safer, Greener. a Synchronous Frame Servo Tracking a rotating reference signal in the same rotating frame is easy! Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Take the “Coffee” Test 1. Give your coffee a good stir so that bubbles form on the surface. 2. Holding the cup as shown here, spin around in the same direction that you stirred the coffee. 3. As soon as you reach synchronous speed, the bubbles stop spinning. Why? Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 2. Compare the measured current (vector) with the desired current (vector), and generate error signals. Jump up on the rotating reference frame, whose x-axis is the rotor flux axis. ib B is iq id ia This is called the Park Transform A q C a b id ia cos q + ib sin q iq -ia sin q + ib cos q Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 2. Compare the measured current (vector) with the desired current (vector), and generate error signals. and i q are handled independently. Since the comparison is performed in the synchronous frame, motor AC frequency is not seen. Thus, they are DC quantities! id Under normal conditions, we have all the flux we need supplied by the permanent magnets on the rotor. So commanded id is set to zero. This is how much torque we want! i d (commanded) + i d (measured) errord (t) - i q (commanded) + i q (measured) errorq (t) - i d can be used to weaken the field of the machine. i q controls the amount of torque generated by the motor Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 3. (Finally!) Amplify the error signals to generate correction voltages. PI Controller (d-axis) Commanded Id Measured Id Error + Ka ∫ Kb - Vd + + PI Controller (q-axis) Error + Commanded Iq Ka Kb - Measured Iq ∫ Vq + + K a L Current Bandwidth (rad / sec), K b R L Motor Rd Rq Ld Lq PMSM Rs Rs Ls Ls ACIM Rs Rs+Rr IPM Rs Rs Dave Wilson 2 L Ls 1 - m Lr Ls 2 L m Ls 1 Lr Ls Ls_d TI Spins Motors…Smarter, Safer, Greener. Ls_q 4. Modulate the correction voltages onto the motor terminals. Before we can apply the voltages to the motor windings, we must first jump off of the rotating reference frame. vb B Voltage vector vq vd q va A Part A. Transfer the voltage vectors back to the stationary rectangular coordinate system. vd (t) vq(t) Dave Wilson C va vd cos q - vq sin q a b vb vd sin q + vq cos q TI Spins Motors…Smarter, Safer, Greener. 4. Modulate the correction voltages onto the motor terminals. Part B. Next, we transform the voltage vectors from the rectangular coordinate system to three phase vectors. vb vc B Voltage Vector vb v a va A C Reverse Clarke Transformation a b Dave Wilson A a B - 12 a + 3 2 b C - 12 a - 3 2 b A B C TI Spins Motors…Smarter, Safer, Greener. 4. Modulate the correction voltages onto the motor terminals. Phase A - top Phase A - bottom Phase B - top Phase B - bottom Phase C - top Phase C - bottom Over time, under steady-state conditions, the correction voltages va, vb, and vc will be sine waves phase shifted by 120o. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. FOC in a Nutshell Va Wilson Torque Current Flux Current q Desired Torque + - Desired Flux + - Dave Wilson PI Vb Reverse Clarke-Park Transforms Vq q Vd + + -1 Vc i i i B C A Forward Clarke-Park Transforms q PI TI Spins Motors…Smarter, Safer, Greener. iq id 2014 Texas Instruments Motor Control Training Series d-axis V3 = 010 V2 = 110 Sector 2 Vref Sector 3 a V4 = 011 T2•V2 V1 = 100 T1•V1 q-axis Sector 6 Sector 4 Sector 5 V5 = 001 V6 = 101 -Vth Space Vector Modulation • PWMs treat each phase individually. • SVM treats the inverter as ONE unit!! - ALL 6 switches affected. U TI Dave’s Control Center V • PWMs control the phase voltages. W 120° offsets between A, B, and C. • SVM controls the Voltage Vector. The inverter can be driven to 8 states. V1 = 001 A B A - 6 voltage vectors B C V6=110 A B V2 = 010 V3 = 011 A B C V4 = 100 C A B A B C V5 = 101 C A B C C V0 = 000 V7 = 111 - 2 null vectors Source: Mahmoud Riaz, Sc.D., Professor of Electrical Engineering, Department of Electrical and Computer Engineering, University of Minnesota Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 1 = Top Switch is on 0 = Bottom Switch is on Space Vector Modulation V1 V3 V2 V6 V4 V5 V2 120o V1 V3 60o C 300 B V6 180o 0o V1 A 0 60 120 180 240 300 “6-Step” Voltage Waveforms 0 300o 240o V5 V4 Vector Diagram Output voltage vector created by repeatedly switching between adjacent vectors and the “null” vector (all three phases high or all three phases low). Output angle q determined by relative “on” time between two adjacent vectors. Output magnitude determined by relative “on” time between two adjacent vectors and the null vector. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. SVM Implementation V3 = 011 (Vy) V2 = 010 • Vref, is created by the two adjacent state vectors Vx, Vy, and a null vector in a time averaging fashion: Vref = Vx•T1 + Vy•T2 + Vnull•T0 Where: Sector 2 Vref Sector 3 a V6 = 110 Vx = lowest angle voltage vector Vy = highest angle voltage vector T2•Vy V1 = 001 (Vx) T1•Vx Sector 4 Sector 6 Sector 5 If Vref is represented in POLAR notation ( ma): T1 = T•m•SIN(60 - a) T2 = T•m•SIN(a) T0 = T - T1 - T2 m = vector magnitude (0 to 1) a = vector angle between Vref and Vx (0 to 60o) T = switching period Dave Wilson V5 = 101 V4 = 100 Example vector reconstruction in sector 1. SWITCHING PERIOD T Vx Vy Null T1 T2 T0 TI Spins Motors…Smarter, Safer, Greener. SVM Variations • Choice of Null vectors effects SVM waveform creation and switching performance but motor still sees sinusoidal waveform at its phases. NULL=V7 NULL=V0 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 60 A 120 180 B 240 300 360 C 0 60 A 120 180 B Good choice when reduced switching losses are desired in an inverter with high-side bootstrap circuits. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 240 300 C 360 SVM Variations (continued) Null = V7 in sectors 1,3,5 Null = V0 in sectors 2,4,6 Null = V0 in sectors 1,3,5 Null = V7 in sectors 2,4,6 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0 0 60 A 120 180 240 B 300 360 0 60 C 120 180 A 240 B 300 360 C 1 0.8 Null = alt-rev (null alternates every sequence and sequence reverses.) Most popular form of SVM • Similar waveforms to Third Harmonic 0.6 0.4 0.2 0 0 60 A Dave Wilson 120 180 B 240 300 360 C TI Spins Motors…Smarter, Safer, Greener. SVM Using Center-Aligned PWMs PWM Period Sc Sb Sa V1 V3 V7 V3 V1 V0 V1 V3 V7 V3 V1 t1 t2 t0 t2 t1 t0 t1 t2 t0 t2 t1 Alternating-Reversing Sequence Check out http://www.ipes.ethz.ch/ipes/Raumzeiger/e_RZ4.html for a neat SVM animation! Dave Wilson TI Spins Motors…Smarter, Safer, Greener. SVM with PWMs Procedure for implementing SVM with Center-Aligned PWM Module 1 Check which sector the Vref vector is in. 2 Calculate T1, T2, and T0 from block below. 3 Adjust PWMs High times based on table below. T1 = T•m•SIN(60 - a) T2 = T•m•SIN(a) T0 = T - T1 - T2 (5 compares) (3 multiples) (1-3 additions) V0 in 1,3,5 V7 in 2,4,6 Alternating Reversing Sequencing Null = V0 Null = V7 V7 in 1,3,5 V0 in 2,4,6 U = T1+T2 Sector 1 V = T2 W=0 U = 100% V = T0+T2 W = T0 U = 100% V = T0+T2 W = T0 U = T1+T2 V = T2 W=0 U = T1+T2+.5T0 V = T2+.5T0 W = .5T0 U = T1 Sector 2 V = T1+T2 W=0 U = T0+T1 V = 100% W = T0 U = T1 V = T1+T2 W=0 U = T0+T1 V = 100% W = T0 U = T1+.5T0 V = T1+T2+.5T0 W = .5T0 U=0 Sector 3 V = T1+T2 W = T2 U = T0 V = 100% W = T0+T2 U = T0 V = 100% W = T0+T2 U=0 V = T1+T2 W = T2 U = .5T0 V = T1+T2+.5T0 W = T2+.5T0 U=0 Sector 4 V = T1 W = T1+T2 U = T0 V = T0+T1 W = 100% U=0 V = T1 W = T1+T2 U = T0 V = T0+T1 W = 100% U = .5T0 V = T1+.5T0 W = T1+T2+.5T0 U = T2 Sector 5 V = 0 W = T1+T2 U = T0+T2 V = T0 W = 100% U = T0+T2 V = T0 W = 100% U = T2 V=0 W = T1+T2 U = T2+.5T0 V = .5T0 W = T1+T2+.5T0 U = T1+T2 Sector 6 V = 0 W = T1 U = 100% V = T0 W = T0+T1 U = T1+T2 V=0 W = T1 U = 100% V = T0 W = T0+T1 U = T1+T2+.5T0 V = .5T0 W = T1+.5T0 Note: All calculations referenced to top switch Source: Understanding Space Vector Modulation, by Peter Pinewski, EDN Products Edition, March 7, 1996 Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Sinusoidal Modulation Limited Amplitude In sinusoidal modulation the amplitude is limited to half of the DC-bus voltage. • The phase to phase voltage is then lower then the DC-bus voltage (although such voltage can be generated between the terminals). PWM2 PWM4 PWM6 UDC-BUS PWM5 A PWM3 B PWM1 Uphase-phase • C Animation Source: Leos Chalupa Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Full Phase-to-Phase Voltage Generation • Full phase-to-phase voltage can be generated by continuously shifting the 3-phase voltage system. Uphase-phase PWM6 Uphase-phase PWM4 A PWM2 B PWM5 A PWM3 B PWM1 15% • The amplitude of the first harmonic can be then increased by 15.5%. C C Animation Source: Leos Chalupa Dave Wilson TI Spins Motors…Smarter, Safer, Greener. How to Increase Modulation Index • Modulation index is increased by adding the “shifting” voltage u0 to first harmonic. • “Shifting” voltage u0 must be the same for all three phases, thus it can only contain 3r harmonics! 15% A B Animation Source: Leos Chalupa Dave Wilson TI Spins Motors…Smarter, Safer, Greener. C SVM with Field Oriented Systems Vb a T1·Vx T2·Vy Va We could calculate “m” and “a”: Recall: Vy T1 = T•m•SIN(60 - a) T2 = T•m•SIN(a) T0 = T - T1 - T2 Vx …but with FOC, we don’t have POLAR notation. We have RECTANGULAR notation (Va and Vb. Va 2 + Vb 2 a tan-1 Vb Va Or… We could use a simple procedure designed specifically for RECTANGULAR notation: Reference Voltage Vector amplitude m Components of the Stator Reference Voltage Vector 1 Va 0.8 0.6 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1 0 Vb 1. 2. a 60 120 180 240 300 360 angle Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector 6 Dave Wilson 3. 4. Perform modified inverse Clarketransform on the voltage vector Calculate which sector the voltage vector is in Determine T1, T2, and T0 Directly calculate the PWM register values TI Spins Motors…Smarter, Safer, Greener. 1. Perform Modified Inverse Clarke Transform Va 3 + 0.5 Vb j - i Dave Wilson i - - 0.5 j k Vb 3 i Va 2 2 j Vb Vb 3 kVa 2 2 k TI Spins Motors…Smarter, Safer, Greener. i 2. Identify the correct sector based on i, j, and k variables a. Calculate the following expression: N sign(i ) + 2 sign j + 4 signk where sign( + ) 1 ; sign( -) 0 b. Use look-up table below to determine the sector from the value of N N= 1 2 3 4 5 6 Sector = 6 2 1 4 5 3 Alternatively, you can determine the sector by using IF THEN statements to check the polarities of i, j, and k. i j 1 Dave Wilson 2 k 3 4 5 TI Spins Motors…Smarter, Safer, Greener. 6 3. Based on the sector, determine T1, T2, and T0 Sector→ Bounded by: T1 T2 † † 1 (U0-U60) 2 (U60-U120) 3 (U120-U180) 4 (U180-U240) 5 (U240-U300) 6 (U300-U0) i -k j -i k -j j -i k -j i -k T0 = 1 – T1 – T2 4. Load the PWM registers based on this table † Recall that T1 always applies to Vx (the most clockwise vector), and T2 applies to Vy (the most counter-clockwise vector) for any given sector. Dave Wilson V0 in 1,3,5 V7 in 2,4,6 Alternating Reversing Sequencing Null = V0 Null = V7 V7 in 1,3,5 V0 in 2,4,6 U = T1+T2 Sector 1 V = T2 W=0 U = 100% V = T0+T2 W = T0 U = 100% V = T0+T2 W = T0 U = T1+T2 V = T2 W=0 U = T1+T2+.5T0 V = T2+.5T0 W = .5T0 U = T1 Sector 2 V = T1+T2 W=0 U = T0+T1 V = 100% W = T0 U = T1 V = T1+T2 W=0 U = T0+T1 V = 100% W = T0 U = T1+.5T0 V = T1+T2+.5T0 W = .5T0 U=0 Sector 3 V = T1+T2 W = T2 U = T0 V = 100% W = T0+T2 U = T0 V = 100% W = T0+T2 U=0 V = T1+T2 W = T2 U = .5T0 V = T1+T2+.5T0 W = T2+.5T0 U=0 Sector 4 V = T1 W = T1+T2 U = T0 V = T0+T1 W = 100% U=0 V = T1 W = T1+T2 U = T0 V = T0+T1 W = 100% U = .5T0 V = T1+.5T0 W = T1+T2+.5T0 U = T2 Sector 5 V = 0 W = T1+T2 U = T0+T2 V = T0 W = 100% U = T0+T2 V = T0 W = 100% U = T2 V=0 W = T1+T2 U = T2+.5T0 V = .5T0 W = T1+T2+.5T0 U = T1+T2 Sector 6 V = 0 W = T1 U = 100% V = T0 W = T0+T1 U = T1+T2 V=0 W = T1 U = 100% V = T0 W = T0+T1 U = T1+T2+.5T0 V = .5T0 W = T1+.5T0 Note: All calculations referenced to top switch Source: Understanding Space Vector Modulation, by Peter Pinewski, EDN Products Edition, March 7, 1996 TI Spins Motors…Smarter, Safer, Greener. Axis Coupling 1/Ld 1/Lq Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Current Regulator Decoupling Permanent Magnet Motors Commanded id + - Ka + + Kb id w Vd + - ∫ Vd compensation Ls iq Commanded iq Vq compensation + Ka + + Kb + + + Vq ∫ KE Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Too Much Flux??? The larger the flux, the higher the dλ/dt is for a given speed. dλ/dt is voltage, so the back-EMF is higher for a given speed. When the back-EMF amplitude reaches the bus voltage, current goes to zero. When current goes to zero, torque goes to zero. Therefore, the motor cannot go any faster…all because of too much flux. Speed Torque Flux Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Weakening the Field…LUT Id_nominal Rated Speed Idref Speed Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Weakening the Field…Voltage Limit Max Limit == Vq Reset + 0.97 Idref Min Limit Slew Value Vqlim Vqlim VEMFq 0.7 Vq S + Reset Q Vq “1” or “0” Vd R Vlim Vd is given 1st dibs on available voltage Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Less Flux Means More Speed Speed Previous Speed Limit Torque Observe how the flux is weakened Flux Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 2014 Texas Instruments Motor Control Training Series -Vth Dave Wilson -2 K V Speed-Torque Performance of Induction Motors -4 K V -6 K V -8 K V -1 0 K V Torque (newton-meters) -1 2 K V Pull-out Torque -1 4 K V V (te m ) 5 0V 4 0V 3 0V 2 0V 1 0V Starting Torque 0V -1 0 V -2 0 V -3 0 V -4 0 V -5 0 V -6 0 V -7 0 V 00s 2s 0.2 4s 0.4 6s 0.6 8s 0.8 1 01.0 s 11.2 2s 11.4 4s 11.6 6s % Synchronous Speed Dave Wilson TI Spins Motors…Smarter, Safer, Greener. 11.8 8s 22.0 0s Stator and Rotor Fields Source: Mahmoud Riaz, Sc.D., Professor of Electrical Engineering, Department of Electrical and Computer Engineering, University of Minnesota Dave Wilson TI Spins Motors…Smarter, Safer, Greener. ACIM Circuit Representation with Arbitrary Turns Ratio “a” rs jw Ls - aLm jw a 2 Lr - aLm jwaLm General equivalent circuit showing arbitrary value of referral ratio “a” (a=1 corresponds to a turns ratio of Ns/Nr, which yields the conventional circuit.) If the actual value of rotor current isn’t required, “a” can be any value except zero or infinity, resulting in an infinite number of possible circuits! Dave Wilson TI Spins Motors…Smarter, Safer, Greener. a 2 rr S ACIM Circuit Representation with Turns Ratio a=Lm/Lr iq Rotor Flux current Torque current Stator current id Rotor leakage reactance now lumped with mutual and stator leakage reactances! This implies that a reference frame exists where the stator current can be resolved into torque current and flux current. Source: Vector Control and Dynamics of AC Drives, by Don Novotny and Tom Lipo, Oxford University Press, 2000 Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Torque Production in an ACIM ~ Lm ~ Ir I sT Lr rotor current ~ One expression for torque is the cross product between the rotor current and the rotor flux. I sT Stator current is resolved into flux producing and torque producing components. ~ I s ~ Rotor flux is NOT fixed ~ w.r.t. rotor. It is s “asynchronous” to rotor position. I ~ r Lm I s rotor flux Lm 3 L2m P Er I r 3 P we Lm I s I sT P I s I sT Te 3 2 2w e 4 we Lr 4 Lr rotor flux rotor current P is the number of poles Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Dynamic Response of RotorReferenced FOC Step change in iqs iqr - Lm iqs Lr Step change in ids iqs iqr iqs ids dr Rotor current (and thus torque) are instantaneously changed. Dave Wilson idr iqr iqs ids dr ids dr Rotor flux (and thus torque) are gradually changed. TI Spins Motors…Smarter, Safer, Greener. ACIM Slip Frequency Calculation Texas Instruments is a neat company! Encoder Dave Wilson’s Motor Control Center qr Slip Calculator id 1 1 + Str Poles/2 tr qe D iq N ^ slip w ^q ^ qd + slip + B qd 9.9° Recall that the rotor flux sweeps across the surface of the rotor at a speed equal to the slip frequency, i.e., it is “asynchronous” to the rotor. A C Dave Wilson TI Spins Motors…Smarter, Safer, Greener. P + + Commanded id (flux) + - ∫ I Commanded iq (torque) + + + Vq Va Vb Vc θd + - + - I Reverse Clarke-Park Transform P P Commanded Rotor Speed + Vd ∫ ∫ I iq id ia Forward Clarke-Park Transform Speed Calculator ib ic - θd Commanded id Commanded iq Slip Slip Frequency Calculator ∫ θd + + Actual Rotor Angle Control Diagram of an Induction Motor Speed Controller Utilizing Field Oriented Control. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Texas Instruments is a neat company! Dave Wilson’s Motor Control Center 2014 Texas Instruments Motor Control Training Series -Vth Dave Wilson Buried Magnets Create NEW Torque Buried rotor magnets produce different inductances on the d-q axes. This results in a NEW torque component proportional to the difference in these inductances. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Total Motor Torque Ids Iqs Permanent Magnet Rotor Reluctance Torque Reaction Torque 3P Torque dr I qs + Lds - Lqs I ds I qs 22 † Torque expression based on amplitude invariant form of Clarke Transform. Dave Wilson TI Spins Motors…Smarter, Safer, Greener. † Torque Torque vs. Angle Reaction Torque (magnet to magnet) CCW Q D Stable CW 0o Unstable Stable 45o 90o Unstable 135o Unstable 180o Reluctance Torque (magnet to metal) The magnets exerts force on the rotor in an effort to minimize the resistance (reluctance) of the flux path. Locked Rotor Dave Wilson TI Spins Motors…Smarter, Safer, Greener. Effect of Saliency on Optimum Torque Angle Positive Ids Dave Wilson Negative Ids TI Spins Motors…Smarter, Safer, Greener. MTPA Control of IPM Motors Commanded Speed + - Limit i T i 1 r id - + 4 Ld - Lq Commanded d r2 2 + + 8 i Ld - Lq 2 T - Current Controller id Vd Reverse Clarke-Park Transform Actual Speed i Commanded q Current Controller + - Vb IPM TI Dave’s Control Center Vc θd iq id ia d/dt Forward Clarke-Park Transform θd Dave Wilson Vq Va ib ic Phase C Current Calculation Rotor Flux Angle TI Spins Motors…Smarter, Safer, Greener.