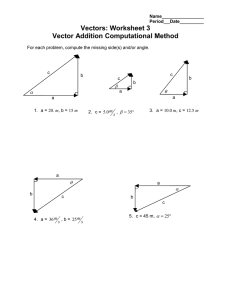
Biomechanics – Module 1: Module 1.1 - Intro: Biomechanics is the study of forces and their effects on living systems. Broken into two branches: o Kinematics (study of temporal and spatial factors) – WHAT Distance/displacement Speed/velocity Consistency of movement (acceleration) Linear & angular movement o Kinetics (causes of motion) HOW Force Friction Impulse Goals of biomechanics WHY o Improve performance (better technique greater biomechanical efficiency) o Reduce risk of injury (better technique safer methodology) Module 1.1.1 – Types of Motion: Linear Motion o When the whole body/object moves in the same direction and distance o Linear motion can be: Rectilinear (whole body/object moves in a straight line) Curvilinear (whole body/object moves along a curved path) Angular Motion o When the whole body/object follows a circular path with an axis of rotation (point which the body/object rotates). General Motion (most common) o The combination of linear and angular motion, e.g., when walking: the limbs rotate around the joints while the centre of mass travels along a linear path. Module 1.1.2 – Units of Measurement: In biomechanics we use the International System of Units (SI units) metric system. Units of measurement consist of: o Fundamental (independent of any other unit) E.g. metres, seconds, kilograms o Derived (units derived by dividing/multiplying a fundamental unit) Centimetres, millisecond, grams, metres per second. Weight vs Mass: o Mass amount of matter in a body (measure in kg) o Weight force exerted by a mass due to gravity (measure in Newtons (N)) Module 1.1.3 – Scalar & Vector Quantities: Physical quantities can be either: o Scalar (magnitude only e.g., 4m/s) o Vector (magnitude and direction 4m/s North) Distance and Displacement: o Distance (d – scalar quantity) length of the path o Displacement (s – vector quantity) length of a straight line joining the star and end points. Speed and Velocity: o Speed (sp – time rate change of distance - scalar) o Velocity (v – time rate change of displacement - vector) o Average vs Instantaneous Speed/Velocity: Average the average of all instantaneous speeds/velocities calculated over time, e.g. total distance div time gives avg. Instantaneous the speed/velocity at any given instant in time, e.g., speedometer. Acceleration: o Acceleration (a - time rate change of velocity – vector) o Different algebraic symbols to represent initial velocity (u) and final velocity (v), thus; o Signs and conventions: For magnitude of acceleration: Positive (+) speeding up Negative (-) slowing down ALSO implies direction if an object is falling it has a negative direction. Module 1.2 – Working with Vectors It’s common for multiple vectors to be acting on a body at the same time, thus, we need to add/subtract vectors to find the net effect on the system. Drawing vectors: o Vectors are represented by straight arrows, detailing the direction (which way it’s pointing) and the magnitude (the length of the arrow). Module 1.2.1 – Vector Addition (in one plane): Module 1.2.2 – Vector Addition (in two planes): Steps: Draw the head of the vertical arrow connected to the tail of the horizontal arrow. Create a right angled triangle by drawing the resultant line (R) – the hypotenuse. Solve for theta (placed in the angle of the tail of the vertical, aka where the diagram started) using inverse sohcahtoa. (often using tan). Write answer as: (length of resultant) (angle of theta) 8m S60°15’W. Module 1.2.3 – Resolving Vectors into Components: Steps: Multiply the magnitude of the arrow by cosine(angle between the arrow and variable line your solving for). E.g., 40m/s × cos(60). Module 1.3 – Graphing Graphing allows for data visualisation and interpretation. Tangents: o A straight line that touches the curve at one point only: o The gradient of the tangent represents the gradient of the curve at that particular point. Area Principle: o Finding the area below a curve is known as integration. o To do integration you break the curve down into geometric shapes such as rectangles and triangles as well as using the trapezoidal rule. Module 1.3.1 - Kinematic/Time Graphs Kinematic/time graphs represent kinematic data (y axis) against time (x axis). These include: o Displacement/time graphs o Velocity/time graphs o Acceleration/time graphs Module 1.3.2 – Displacement/Time Graphs Gradient of a displacement/time graph: o Module 1.3.3 – Velocity/Time Graphs Gradient of a velocity/time graph: o o The area under a velocity-time curve = displacement, given by Module 1.3.4 – Acceleration/Time Graphs 𝟏 Area under an acceleration/time graph = velocity, given by 𝟐 𝒂𝒕. 𝟏 𝟐 𝒗𝒕.