RECOMMENDED PRACTICE
DNV-RP-C204
DESIGN AGAINST
ACCIDENTAL LOADS
OCTOBER 2010
DET NORSKE VERITAS
FOREWORD
DET NORSKE VERITAS (DNV) is an autonomous and independent foundation with the objectives of safeguarding life,
property and the environment, at sea and onshore. DNV undertakes classification, certification, and other verification and
consultancy services relating to quality of ships, offshore units and installations, and onshore industries worldwide, and carries
out research in relation to these functions.
DNV service documents consist of amongst other the following types of documents:
— Service Specifications. Procedual requirements.
— Standards. Technical requirements.
— Recommended Practices. Guidance.
The Standards and Recommended Practices are offered within the following areas:
A) Qualification, Quality and Safety Methodology
B) Materials Technology
C) Structures
D) Systems
E) Special Facilities
F) Pipelines and Risers
G) Asset Operation
H) Marine Operations
J) Cleaner Energy
O) Subsea Systems
The electronic pdf version of this document found through http://www.dnv.com is the officially binding version
© Det Norske Veritas
Any comments may be sent by e-mail to rules@dnv.com
For subscription orders or information about subscription terms, please use distribution@dnv.com
Computer Typesetting (Adobe Frame Maker) by Det Norske Veritas
If any person suffers loss or damage which is proved to have been caused by any negligent act or omission of Det Norske Veritas, then Det Norske Veritas shall pay compensation to such person
for his proved direct loss or damage. However, the compensation shall not exceed an amount equal to ten times the fee charged for the service in question, provided that the maximum compensation shall never exceed USD 2 million.
In this provision "Det Norske Veritas" shall mean the Foundation Det Norske Veritas as well as all its subsidiaries, directors, officers, employees, agents and any other acting on behalf of Det
Norske Veritas.
Recommended Practice DNV-RP-C204, October 2010
Changes – Page 3
CHANGES
•
General
•
As of October 2010 all DNV service documents are primarily
published electronically.
In order to ensure a practical transition from the “print” scheme
to the “electronic” scheme, all documents having incorporated
amendments and corrections more recent than the date of the
latest printed issue, have been given the date October 2010.
Main changes
Since the previous edition (November 2004), this document
has been amended, most recently in April 2005. All changes
have been incorporated and a new date (October 2010) has
been given as explained under “General”.
An overview of DNV service documents, their update status
and historical “amendments and corrections” may be found
through http://www.dnv.com/resources/rules_standards/.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 4 – Changes
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Contents – Page 5
CONTENTS
1.
1.1
1.2
1.3
1.4
GENERAL .............................................................. 7
Introduction .............................................................7
Application ...............................................................7
Objectives .................................................................7
Normative references ..............................................7
1.4.1
1.4.2
DNV Offshore Standards (OS)........................................... 7
DNV Recommended Practices (RP)................................... 7
1.5
1.6
Definitions ................................................................7
Symbols.....................................................................8
2.
2.1
2.2
2.3
2.4
2.5
DESIGN PHILOSOPHY ....................................... 9
General .....................................................................9
Safety format............................................................9
Accidental loads .......................................................9
Acceptance criteria..................................................9
Analysis considerations .........................................10
3.
3.1
3.2
3.3
SHIP COLLISIONS............................................. 10
General ...................................................................10
Design principles....................................................10
Collision mechanics ...............................................11
3.3.1
3.3.2
Strain energy dissipation................................................... 11
Reaction force to deck ...................................................... 11
3.4
3.5
Dissipation of strain energy ..................................11
Ship collision forces ...............................................11
3.5.1
3.5.2
3.5.3
3.6
3.7
3.7.1
3.7.2
Recommended force-deformation relationships............... 11
Force contact area for strength design of large diameter
columns............................................................................. 13
Energy dissipation is ship bow ......................................... 13
Force-deformation relationships for denting of
tubular members ...................................................14
Force-deformation relationships for beams........14
3.7.4
General.............................................................................. 14
Plastic force-deformation relationships including elastic,
axial flexibility.................................................................. 14
Support capacity smaller than plastic bending moment of
the beam............................................................................ 16
Bending capacity of dented tubular members .................. 16
3.8
3.9
3.10
Strength of connections.........................................17
Strength of adjacent structure .............................17
Ductility limits........................................................17
3.7.3
3.10.1
3.10.2
3.10.3
3.10.4
3.11
General.............................................................................. 17
Local buckling ................................................................. 17
Tensile fracture ................................................................. 18
Tensile fracture in yield hinges......................................... 18
Resistance of large diameter, stiffened columns.19
3.11.1
3.11.2
3.11.3
3.11.4
General.............................................................................. 19
Longitudinal stiffeners...................................................... 19
Ring stiffeners................................................................... 19
Decks and bulkheads ........................................................ 19
3.12
3.13
Energy dissipation in floating production
vessels......................................................................19
Global integrity during impact ............................19
4.
4.1
4.2
4.3
4.4
DROPPED OBJECTS ......................................... 19
General ...................................................................19
Impact velocity.......................................................20
Dissipation of strain energy ..................................21
Resistance/energy dissipation ...............................21
4.4.1
4.4.2
4.4.3
4.5
Stiffened plates subjected to drill collar impact ............... 21
Stiffeners/girders .............................................................. 21
Dropped object ................................................................. 21
Limits for energy dissipation ............................... 21
4.5.1
4.5.2
Pipes on plated structures ................................................. 21
Blunt objects ..................................................................... 21
5.
5.1
5.2
5.3
5.4
5.5
5.6
5.7
FIRE ...................................................................... 21
General................................................................... 21
General calculation methods................................ 22
Material modelling................................................ 22
Equivalent imperfections...................................... 22
Empirical correction factor.................................. 22
Local cross sectional buckling.............................. 22
Ductility limits ....................................................... 22
5.8
Capacity of connections ........................................ 23
6.
6.1
6.2
6.3
EXPLOSIONS ...................................................... 23
General................................................................... 23
Classification of response ..................................... 23
Recommended analysis models for stiffened
panels...................................................................... 23
SDOF system analogy ........................................... 25
Dynamic response charts for SDOF system ....... 26
MDOF analysis...................................................... 27
Classification of resistance properties ................ 27
5.7.1
5.7.2
5.7.3
6.4
6.5
6.6
6.7
6.7.1
6.8
6.9
6.9.1
6.9.2
6.9.3
6.10
6.10.1
6.10.2
6.10.3
General.............................................................................. 22
Beams in bending ............................................................. 23
Beams in tension............................................................... 23
Cross-sectional behaviour................................................. 27
Idealisation of resistance curves .......................... 28
Resistance curves and transformation factors
for plates ................................................................ 28
Elastic - rigid plastic relationships.................................... 28
Axial restraint ................................................................... 29
Tensile fracture of yield hinges ........................................ 29
Resistance curves and transformation factors
for beams................................................................ 29
6.10.4
6.10.5
6.10.6
6.10.7
Beams with no- or full axial restraint ............................... 29
Beams with partial end restraint. ...................................... 32
Beams with partial end restraint - support capacity
smaller than plastic bending moment of member............. 34
Effective flange................................................................. 34
Strength of adjacent structure ........................................... 34
Strength of connections .................................................... 34
Ductility limits.................................................................. 34
7.
REFERENCES..................................................... 35
8.
COMMENTARY ................................................. 35
9.
9.1
EXAMPLES ......................................................... 43
Design against ship collisions ............................... 43
9.1.1
9.2
9.2.1
9.2.2
9.2.3
9.3
9.3.1
9.3.2
9.3.3
Jacket subjected to supply vessel impact.......................... 43
Design against explosions ..................................... 44
Geometry .......................................................................... 44
Calculation of dynamic response of plate: ....................... 44
Calculation of dynamic response of stiffened plate.......... 44
Resistance curves and transformation factors .. 44
Plates................................................................................. 44
Calculation of resistance curve for stiffened plate ........... 45
Calculation of resistance curve for girder......................... 46
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 6 – Contents
9.4
Ductility limits ..................................................... 46
9.4.1
9.4.2
9.4.3
Plating ...............................................................................46
Stiffener: ...........................................................................46
Girder: ...............................................................................47
9.5
Design against explosions - girder ....................... 47
9.5.1
9.5.2
9.5.3
9.5.4
9.5.5
9.5.6
Geometry, material and loads ...........................................47
Cross sectional of properties for the girder.......................48
Mass ..................................................................................51
Natural period ...................................................................51
Ductility ratio ....................................................................52
Maximum blast pressure capacity.....................................52
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 7
1. General
DNV-OS-C301
1.1 Introduction
This Recommended Practice deals with design to maintain the
load-bearing function of the structures during accidental
events. The overall goal of the design against accidental loads
is to achieve a system where the main safety functions of the
installation are not impaired.
The Recommended Practice has been developed for general
world-wide application. Governmental legislation may include
requirements in excess of the provisions of this Recommended
Practice depending on type, location and intended service of
the unit/installation.
The Design Accidental Loads and associated performance criteria are given in DNV-OS-A101. The Accidental Loads in
this standard are prescriptive loads. This Recommended Practice may also be used in cases where the Design Accidental
Loads are determined by a formal safety assessment (see
DNV-OS-A101, Appendix C) or Quantified Risk Assessment
(QRA).
The following main subjects are covered:
—
—
—
—
—
Design philosophy
Ship Collisions
Dropped Objects
Fire
Explosions.
The Recommended Practice is applicable to all types of floating and fixed offshore structures made of steel. The methods
described are relevant for both substructures and topside structures.
The document is limited to load-carrying structures and does
not cover pressurised equipment.
1.3 Objectives
The objective with this Recommended Practice is to provide
recommendations for design of structures exposed to accidental events.
1.4 Normative references
The following standards include requirements which, through
reference in the text constitute provisions of this Recommended Practice. Latest issue of the references shall be used
unless otherwise agreed. Other recognised standards may be
used provided it can be demonstrated that these meet or exceed
the requirements of the standards referenced below.
Any deviations, exceptions and modifications to the codes and
standards shall be documented and agreed between the supplier, purchaser and verifier, as applicable.
1.4.1 DNV Offshore Standards (OS)
The latest revision of the following documents applies:
DNV-OS-C102
DNV-OS-C103
DNV-OS-C104
DNV-OS-C105
DNV-OS-C106
1.4.2 DNV Recommended Practices (RP)
The latest revision of the following documents applies:
DNV-RP-C201
DNV-RP-C202
Buckling Strength of Plated Structures
Buckling Strength of Shells
1.5 Definitions
Load-bearing structure: That part of the facility whose main
function is to transfer loads.
Accidental Event: An undesired incident or condition which, in
combination with other conditions (e.g.: weather conditions,
failure of safety barrier, etc.), determines the accidental
effects.
Accidental Effect: The result of an accidental event, expressed
in terms of heat flux, impact force and energy, acceleration,
etc. which is the basis for the safety evaluations.
Design Accidental Event (DAE): An accidental event, which
results in effects that, the platform should be designed to sustain.
Acceptance criteria: Functional requirements, which are concerned with the platforms' resistance to accidental effects. This
should be in accordance with the authority's definition of
acceptable safety levels.
1.2 Application
DNV-OS-A101
DNV-OS-C101
Stability and Watertight Integrity of
Offshore Units
Safety Principles and Arrangements
Design of Offshore Steel Structures,
General (LRFD Method)
Structural Design of Offshore Ships
Structural Design of Column Stabilised
Units (LRFD)
Structural Design of Self-Elevating Units
(LRFD)
Structural Design of TLPs (LRFD)
Structural Design of Deep Draught
Floating Units (LRFD)
Active protection: Operational loads and mechanical equipment which are brought into operation when an accident is
threatening or after the accident has occurred, in order to limit
the probability of the accident and the effects thereof, respectively. Some examples are safety valves, shut down systems,
water drenching systems, working procedures, drills for coping with accidents, etc.
Passive protection: Protection against damage by means of
distance, location, strength and durability of structural elements, insulation, etc.
Event control: Implementation of measures for reducing the
probability and consequence of accidental events, such as
changes and improvements in equipment, working procedures,
active protection devices, arrangement of the platform, personnel training, etc.
Indirect design: Implementation of measures for improving
structural ductility and resistance without numerical calculations and determination of specific accidental effects.
Direct design: Determination of structural resistance, dimensions, etc. on basis of specific design accidental effects.
Load: Any action causing load effect in the structure.
Characteristic load: Reference value of a load to be used in
determination of load effects when using the partial coefficient
method or the allowable stress method.
Load effect: Effect of a single load or combination of loads on
the structure, such as stress, stress resultant (internal force and
moment), deformation, displacement, motion, etc.
Resistance: Capability of a structure or part of a structure to
resist load effect.
Characteristic resistance: The nominal capacity that may be
used for determination of design resistance of a structure or
structural element. The characteristic value of resistance is to
be based on a defined percentile of the test results.
Design life: The time period from commencement of construction until condemnation of the structure.
Limit state: A state where a criterion governing the load-carrying ability or use of the structure is reached.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 8
1.6 Symbols
clp
Plastic zone length factor
A
Cross-sectional area
cs
Shear factor for vibration eigenperiod
Ae
Effective area of stiffener and effective plate flange
cQ
Shear stiffness factor
As
Area of stiffener
cw
Displacement factor for strain calculation
Ap
Projected cross-sectional area
d
Smaller diameter of threaded end of drill collar
Aw
Shear area of stiffener/girder
dc
Characteristic dimension for strain calculation
B
Width of contact area
f
Generalised load
CD
Hydrodynamic drag coefficient
fu
Ultimate material tensile strength
D
Diameter of circular sections, plate stiffness
fy
Characteristic yield strength
E
g
Acceleration of gravity, 9.81 m/s2
Ep
Young's Modulus of elasticity,
(for steel 2.1⋅105 N/mm2)
Plastic modulus
hw
Web height for stiffener/girder
Ekin
Kinetic energy
i
Radius of gyration
Es
Strain energy
k
Stiffness, characteristic stiffness, plate stiffness, factor
F
Lateral load, total load
G
Shear modulus
H
Non-dimensional plastic stiffness
I
Moment of inertia, impulse
J
Mass moment of inertia
Kl
Load transformation factor
Km
Mass transformation factor
Klm
k
ke
kl
k
'
1
kQ
Generalised stiffness
Equivalent stiffness
Bending stiffness in linear domain for beam
Stiffness in linear domain including shear deformation
Shear stiffness in linear domain for beam
k y,θ
Temperature reduction of effective yield stress for
maximum temperature in connection
Plate length, beam length
Load-mass transformation factor
l
m
L
Girder length
ms
Ship mass
M
Total mass, cross-sectional moment
mi
Installation mass
MP
Plastic bending moment resistance
meq
Equivalent mass
NP
Plastic axial resistance
m
Generalised mass
Sd
Design load effect
p
Explosion pressure
T
Fundamental period of vibration
r
Radius of deformed area, resistance
N
Axial force
rc
Plastic collapse resistance in bending for plate
NSd
Design axial compressive force
rg
Radius of gyration
NRd
Design axial compressive capacity
s
Distance, stiffener spacing
NP
Axial resistance of cross section
sc
Characteristic distance
R
Resistance
se
Effective width of plate
RD
Design resistance
t
Thickness, time
R0
Plastic collapse resistance in bending
td
Duration of explosion
V
Volume, displacement
tf
Flange thickness
WP
Plastic section modulus
tw
Web thickness
W
Elastic section modulus
vs
Velocity of ship
a
Added mass
vi
Velocity of installation
as
Added mass for ship
vt
Terminal velocity
ai
Added mass for installation
w
Deformation, displacement
b
Width of collision contact zone
wc
Characteristic deformation
bf
Flange width
wd
dent depth
c
Factor
w
Non-dimensional deformation
cf
Axial flexibility factor
x
Axial coordinate
Distributed mass
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 9
y
Generalised displacement, displacement amplitude
2.2 Safety format
yel
Generalised displacement at elastic limit
z
Distance from pivot point to collision point
The requirements to structures exposed for accidental loads are
given in DNV-OS-C101 Section 7.
zplast Smaller distance from flange to plastic neutral axis
α
Plate aspect parameter
β
Cross-sectional slenderness factor
ε
Yield strength factor, strain
εcr
Critical strain for rupture
εy
Yield strain
η
Plate eigenperiod parameter
φ
Displacement shape function
λ
μ
Reduced slenderness ratio
ν
Poisson's ratio, 0.3
θ
Angle
The structure should be checked in two steps:
— First the structure will be checked for the loads to which it
is exposed due to the accidental event
— Secondly in case the structural capacity towards ordinary
loads is reduced as a result of the accident then the strength
of the structure is to be rechecked for ordinary loads.
The structure should be checked for all relevant limit states.
The limit states for accidental loads are denoted Accidental
Limit States (ALS). The requirement may be written as
Sd ≤ R d
Ductility ratio
(2.1)
where:
Sd
=
kg/m3
ρ
Density of steel, 7860
ρw
Density of sea water, 1025 kg/m3
Rd
=
τ
Shear stress
τcr
Critical shear stress for plate plugging
ξ
Interpolation factor
ψ
Plate stiffness parameter
Sk
γf
R
γM
=
=
=
=
Sk γ f Design load effect
Rk
γM
Design resistance
Characteristic load effect
partial factor for loads
Characteristic resistance
Material factor
For check of Accidental limit states (ALS) the load and material factor should be taken as 1.0.
2. Design Philosophy
The failure criterion needs to be seen in conjunction with the
assumptions made in the safety evaluations.
2.1 General
The limit states may need to be alternatively formulated to be
on the form of energy formulation, as acceptable deformation,
or as usual on force or moment.
The overall goal for the design of the structure against accidental loads is to prevent an incident to develop into an accident
disproportional to the original cause. This means that the main
safety functions should not be impaired by failure in the structure due to the design accidental loads. With the main safety
functions is understood:
— usability of escapeways,
— integrity of shelter areas,
— global load bearing capacity
The design against accidental loads may be done by direct calculation of the effects imposed on the structure, or indirectly,
by design of the structure as tolerable to accidents. Examples
of the latter are compartmentation of floating units which provides sufficient integrity to survive certain collision scenarios
without further calculations.
The inherent uncertainty of the frequency and magnitude of the
accidental loads, as well as the approximate nature of the methods for determination of accidental load effects, shall be recognised. It is therefore essential to apply sound engineering
judgement and pragmatic evaluations in the design.
—
—
—
—
Ship collision
Dropped objects
Fire
Explosion
The accidental loads are either prescriptive values or defined
in a Formal Safety Assessment. Prescriptive values may be
given by authorities, the owner or found in DNV Offshore
Standard DNV-OS-A101.
Usually the simplification that accidental loads need not to be
combined with environmental loads is valid.
In this section the design procedure that is intended to fulfil
this goal is presented.
Typical accidental events are:
2.3 Accidental loads
For check of the residual strength in cases where the accident
lead to reduced load carrying capacity in the structure the
check should be made with the characteristic environmental
loads determined as the most probable annual maximum value.
2.4 Acceptance criteria
Examples of failure criteria are:
— Critical deformation criteria defined by integrity of passive fire protection. To be considered for walls resisting
explosion pressure and shall serve as fire barrier after the
explosion.
— Critical deflection for structures to avoid damage to process equipment (Riser, gas pipe, etc). To be considered for
structures or part of structures exposed to impact loads as
ship collision, dropped object etc.
— Critical deformation to avoid leakage of compartments. To
be considered in case of impact against floating structures
where the acceptable collision damage is defined by the
minimum number of undamaged compartments to remain
stable.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 10
The mechanical response to accidental loads is generally concerned with energy dissipation, involving large deformations
and strains far beyond the elastic range. Hence, load effects
(stresses forces, moments etc.) obtained from elastic analysis
and used in ultimate limit state (ULS) checks on component
level are generally not applicable, and plastic methods of analysis should be used.
Plastic analysis is most conveniently based upon the kinematical approach, taking into account the effect of the strengthening (membrane tension) or softening (compression) caused by
finite deformations, where applicable.
The requirements in this RP are generally derived from plastic
methods of analysis, including the effect of finite deformations.
Plastic methods of analysis are valid for materials that can
undergo considerable straining and during this process exhibit
considerable strain hardening. If the material is ductile as such,
i.e. it can be strained significantly, but has little strain hardening, the member tends to behave brittle in a global sense (i.e.
with respect to energy dissipation), and plastic methods should
be used with great caution.
A further condition for application of plastic methods to members undergoing large, plastic rotations is compact cross-sections; typically type I cross-sections (refer DNV-OS-C101,
Table A1). The methods may also be utilised for type II sections provided that the detrimental effect of local buckling is
taken into account. Note that for members subjected to significant tensile straining, the tendency for local buckling may be
overridden by membrane tension for large deformations.
The straining, and hence the amount of energy dissipation, is
limited by fracture. This key parameter is associated with considerable uncertainty, with respect to both physical occurrence
as well as modelling in theoretical analysis. If good and validated models for prediction of fracture are not available, safe
and conservative assumptions for ductility limits should be
adopted.
If non-linear, dynamic finite elements analysis is applied, it
shall be verified that all behavioural effects and local failure
modes (e.g. strain rate, local buckling, joint overloading, and
joint fracture) are accounted for implicitly by the modelling
adopted, or else subjected to explicit evaluation.
3. Ship Collisions
3.1 General
The requirements and methods given in this section have historically been developed for jackets. They are generally valid
also for jack-up type platforms, provided that the increased
importance of global inertia effects are accounted for. Columnstabilised platforms and floating production and storage vessels (FPSOs) consist typically plane or curved, stiffened panels, for which methods for assessment of energy dissipation in
braced platforms (jackets and jack-ups) sometimes are not relevant. Procedures especially dedicated to assessment of energy
dissipation in stiffened plating are, however, also given based
on equivalent beam-column models.
The ship collision load is characterised by a kinetic energy,
governed by the mass of the ship, including hydrodynamic
added mass and the speed of the ship at the instant of impact.
Depending upon the impact conditions, a part of the kinetic
energy may remain as kinetic energy after the impact. The
remainder of the kinetic energy has to be dissipated as strain
energy in the installation and, possibly, in the vessel. Generally
this involves large plastic strains and significant structural
damage to the installation, the ship or both. The strain energy
dissipation is estimated from force-deformation relationships
for the installation and the ship, where the deformations in the
installation shall comply with ductility and stability requirements.
The load bearing function of the installation shall remain intact
with the damages imposed by the ship collision load. In addition, damaged condition should be checked if relevant, see
Section 2.2.
The structural effects from ship collision may either be determined by non-linear dynamic finite element analyses or by
energy considerations combined with simple elastic-plastic
methods.
If non-linear dynamic finite element analysis is applied all
effects described in the following paragraphs shall either be
implicitly covered by the modelling adopted or subjected to
special considerations, whenever relevant.
Often the integrity of the installation can be verified by means
of simple calculation models.
If simple calculation models are used the part of the collision
energy that needs to be dissipated as strain energy can be calculated by means of the principles of conservation of momentum and conservation of energy, refer Section 3.3.
It is convenient to consider the strain energy dissipation in the
installation to take part on three different levels:
— local cross-section
— component/sub-structure
— total system
Interaction between the three levels of energy dissipation shall
be considered.
Plastic modes of energy dissipation shall be considered for
cross-sections and component/substructures in direct contact
with the ship. Elastic strain energy can in most cases be disregarded, but elastic axial flexibility may have a substantial
effect on the load-deformation relationships for components/
sub-structures. Elastic energy may contribute significantly on
a global level.
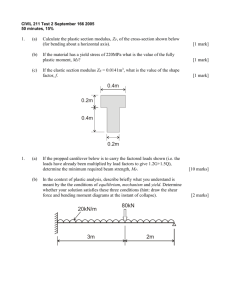
3.2 Design principles
With respect to the distribution of strain energy dissipation
there may be distinguished between, see Figure 3-1:
— strength design
— ductility design
— shared-energy design
Energy dissipation
2.5 Analysis considerations
Ductile
design
Shared-energy
design
Strength
design
ship
installation
Relative strength - installation/ship
Figure 3-1
Energy dissipation for strength, ductile and shared-energy design
Strength design implies that the installation is strong enough to
resist the collision force with minor deformation, so that the
ship is forced to deform and dissipate the major part of the
energy.
Ductility design implies that the installation undergoes large,
plastic deformations and dissipates the major part of the collision energy.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 11
Shared energy design implies that both the installation and
ship contribute significantly to the energy dissipation.
From calculation point of view strength design or ductility
design is favourable. In this case the response of the «soft»
structure can be calculated on the basis of simple considerations of the geometry of the «rigid» structure. In shared energy
design both the magnitude and distribution of the collision
force depends upon the deformation of both structures. This
interaction makes the analysis more complex.
In most cases ductility or shared energy design is used. However, strength design may in some cases be achievable with little increase in steel weight.
3.3 Collision mechanics
3.3.1 Strain energy dissipation
The collision energy to be dissipated as strain energy may depending on the type of installation and the purpose of the
analysis - be taken as:
Compliant installations
2
⎛ vi ⎞
⎜1 − ⎟
⎜ v ⎟
1
2 ⎝
s ⎠
E s = (ms + a s )vs
ms + a s
2
1+
mi + a i
Model
Collision response
Figure 3-2
Model for assessment of reaction force to deck
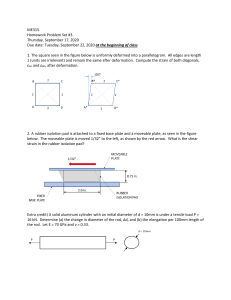
3.4 Dissipation of strain energy
The structural response of the ship and installation can formally be represented as load-deformation relationships as
illustrated in Figure 3-3. The strain energy dissipated by the
ship and installation equals the total area under the load-deformation curves.
Rs
(3.1)
Ri
Fixed installations
1
2
E s = (m s + a s )v s
2
(3.2)
Articulated columns
dws
2
⎛
v ⎞
⎜1 − i ⎟
⎜
v s ⎟⎠
1
⎝
E s = (m s + a s )
2
m z2
1+ s
J
ms
as
vs
mi
ai
vi
J
z
(3.3)
=
=
=
=
=
=
=
ship mass
ship added mass
impact speed
mass of installation
added mass of installation
velocity of installation
mass moment of inertia of installation (including
added mass) with respect to effective pivot point
= distance from pivot point to point of contact
In most cases the velocity of the installation can be disregarded, i.e. vi = 0.
The installation can be assumed compliant if the duration of
impact is small compared to the fundamental period of vibration of the installation. If the duration of impact is comparatively long, the installation can be assumed fixed.
Floating platforms (semi-submersibles, TLP’s, production
vessels) can normally be considered as compliant. Jack-ups
may be classified as fixed or compliant. Jacket structures can
normally be considered as fixed.
3.3.2 Reaction force to deck
In the acceleration phase the inertia of the topside structure
generates large reaction forces. An upper bound of the maximum force between the collision zone and the deck for bottom
supported installations may be obtained by considering the
platform compliant for the assessment of total strain energy
dissipation and assume the platform fixed at deck level when
the collision response is evaluated.
Es,i
Es,s
Ship
Installation
dwi
Figure 3-3
Dissipation of strain energy in ship and platform
E s = E s,s + E s,i = ∫
w s, max
0
R s dw s + ∫
w i, max
0
R i dw i
(3.4)
As the load level is not known a priori an incremental procedure is generally needed.
The load-deformation relationships for the ship and the installation are often established independently of each other assuming the other object infinitely rigid. This method may have,
however, severe limitations; both structures will dissipate
some energy regardless of the relative strength.
Often the stronger of the ship and platform will experience less
damage and the softer more damage than what is predicted
with the approach described above. As the softer structure
deforms the impact force is distributed over a larger contact
area. Accordingly, the resistance of the strong structure
increases. This may be interpreted as an "upward" shift of the
resistance curve for the stronger structure (refer Figure 3-3 ).
Care should be exercised that the load-deformation curves calculated are representative for the true, interactive nature of the
contact between the two structures.
3.5 Ship collision forces
3.5.1 Recommended force-deformation relationships
Force-deformation relationships for supply vessels with a displacement of 5000 tons are given in Figure 3-4 for broad side
-, bow-, stern end and stern corner impact for a vessel with
stern roller.
The curves for broad side and stern end impacts are based upon
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 12
collision events, e.g. impact against tubular braces.
penetration of an infinitely rigid, vertical cylinder with a given
diameter and may be used for impacts against jacket legs (D =
1.5 m) and large diameter columns (D = 10 m).
For beam -, stern end – and stern corner impacts against jacket
braces all energy shall normally be assumed dissipated by the
brace, refer Ch.8, Comm. 3.5.2.
The curve for stern corner impact is based upon penetration of
an infinitely rigid cylinder and may be used for large diameter
column impacts.
For bow impacts against jacket braces, reference is made to
Section 3.5.3.
In lieu of more accurate calculations the curves in Figure 3-4
may be used for square-rounded columns.
For supply vessels and merchant vessels in the range of 25000 tons displacement, the force deformation relationships
given in Figure 3-5 may be used for impacts against jacket legs
with diameter 1.5 m – 2.5 m.
The curve for bow impact is based upon collision with an infinitely rigid, plane wall and may be used for large diameter column impacts, but should not be used for significantly different
50
D
Broad side
D = 10 m
= 1.5 m
Impact force (MN)
40
30
20
Stern corner
Stern end
D = 10 m
= 1.5 m
D
10
Bo
Bow
0
0
1
2
Indentation (m)
3
4
Figure 3-4
Recommended-deformation curve for beam, bow and stern impact
80
40
Design
curve - plane wall
30
Energy
Contact force
40
with bulb
20
20
10
no bulb
0
0
0
1
2
3
Deformation [m]
Figure 3-5
Force -deformation relationship for bow with and without bulb (2-5.000 dwt)
DET NORSKE VERITAS
4
5
Force [MN]
Energy [MJ]
60
Recommended Practice DNV-RP-C204, October 2010
Page 13
70
Bulb force
60
10
Force [MN]
50
8
b
40
6
30
a
20
4
b
2
10
a
0
0
1
2
3
4
Contact dimension [m]
12
0
5
3.5.2 Force contact area for strength design of large diameter columns.
6
Deformation [m]
70
16
Force [MN]
14
50
a
12
40
10
30
8
b
20
6
b
Force
superstructure
10
0
0
1
2
4
2
a
3
Contact dimension [m]
18
60
0
4
5
Deformation [m]
800
Force [MN]
120
100
600
500
80
400
60
300
40
200
20
0
100
0
0
1
2
3
4
5
6
Deformation [m]
7
8
Contact dimensions [m]
a
b
6
b
2
a
0
0
1
2
3
4
5
Deformation [m]
6
7
10
If strength design is not aimed for - and in lieu of more accurate
assessment (e.g. nonlinear finite element analysis) - all strain
energy has to be assumed dissipated by the column, corresponding to indentation by an infinitely rigid stern corner.
For typical supply vessels bows and bows of merchant vessels
of similar size (i.e. 2-5000 tons displacement), energy dissipation in ship bow may be taken into account provided that the
collapse resistance in bending for the brace, R0, see Section 3.7
is according to the values given in Table 3-3. The figures are
valid for normal bows without ice strengthening and for brace
diameters < 1.25 m. The values should be used as step functions, i.e. interpolation for intermediate resistance levels is not
allowed. If contact location is not governed by operation conditions, size of ship and platform etc., the values for arbitrary
contact location shall be used. (see also Ch.8, Comm. 3.5.3).
10
4
1.1
3.5.3 Energy dissipation is ship bow
12
8
Table 3-1 Local concentrated collision force -evenly distributed
over a rectangular area. Stern corner impact
Contact area
Force (MN)
a (m)
b (m)
b
0.35
0.65
3.0
0.35
1.65
6.4
a
0.20
1.15
5.4
2.0
700
Force
Energy
Energy [MJ]
140
The basis for the curves in Figure 3-4 is strength design, i.e.
limited local deformations of the installation at the point of
contact. In addition to resisting the total collision force, large
diameter columns have to resist local concentrations (subsets)
of the collision force, given for stern corner impact in Table 31 and stern end impact in Table 3-2.
Table 3-2 Local concentrated collision force -evenly distributed
over a rectangular area. Stern end impact
Contact area
Force (MN)
a (m)
b (m)
b
0.6
0.3
5.6
a
0.9
0.5
7.5
Figure 3-6
Force -deformation relationship for tanker bow impact
(~ 125.000 dwt)
160
Force-deformation relationships for tanker bow impact are
given in Figure 3-6 for the bulbous part and the superstructure,
respectively, and for the bulb of a VLCC in Figure 3-7. The
curves may be used provided that the impacted structure (e.g.
stern of floating production vessels) does not undergo substantial deformation i.e. strength design requirements are complied
with. If this condition is not met interaction between the bow
and the impacted structure shall be taken into consideration.
Non-linear finite element methods or simplified plastic analysis techniques of members subjected to axial crushing shall be
employed, see Ch.7 /3/, /4/.
8
Figure 3-7
Force -deformation relationship and contact area for the bulbous
bow of a VLCC (~ 340.000 dwt)
Table 3-3 Energy dissipation in bow versus brace resistance
Energy dissipation in bow
Contact location
if brace resistance R0
> 3 MN > 6 MN > 8 MN > 10 MN
Above bulb
1 MJ
4 MJ
7 MJ
11 MJ
First deck
0 MJ
2 MJ
4 MJ
17 MJ
First deck - oblique brace 0 MJ
2 MJ
4 MJ
17 MJ
Between forcastle/first
1 MJ
5 MJ
10 MJ
15 MJ
deck
Arbitrary location
0 MJ
2 MJ
4 MJ
11 MJ
In addition, the brace cross-section must satisfy the following
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 14
compactness requirement
f y t 1.5 D 0.5 ≥
2
⋅ factor
3
(3.5)
where factor is the required resistance in [MN] given in Table
3-3.
See Section 3.6 for notation.
If the brace is designed to comply with these provisions, special care should be exercised that the joints and adjacent structure is strong enough to support the reactions from the brace.
3.6 Force-deformation relationships for denting of
tubular members
The contribution from local denting to energy dissipation is
small for brace members in typical jackets and should be
neglected.
The resistance to indentation of unstiffened tubes may be taken
from Figure 3-8. Alternatively, the resistance may be calculated from Equation (3.6):
20
18
16
b/D =
R/(kRc)
14
12
10
8
2
1
0.5
0
4
2
0
0.1
0.2
0.3
0.4
0.5
wd/D
⎞
⎟⎟
⎠
l
1
1
=
+
k k node 2EA
t2
4
(3.6)
k = 1.0
N Sd
≤ 0.2
N Rd
⎛N
⎞
k = 1.0 − 2⎜⎜ Sd − 0.2 ⎟⎟
⎝ N Rd
⎠
0.2 <
k=0
elastic flexibility of member/adjacent structure,
local deformation of cross-section,
local buckling,
strength of connections,
strength of adjacent structure, and
fracture.
c2
D
t
B
c1 = 22 + 1.2
D
1.925
c2 =
B
3.5 +
D
Rc = fy
3.7.1 General
The response of a beam subjected to a collision load is initially
governed by bending, which is affected by and interacts with
local denting under the load. The bending capacity is also
reduced if local buckling takes place on the compression side.
As the beam undergoes finite deformations, the load carrying
capacity may increase considerably due to the development of
membrane tension forces. This depends upon the ability of
adjacent structure to restrain the connections at the member
ends to inward displacements. Provided that the connections
do not fail, the energy dissipation capacity is either limited by
tension failure of the member or rupture of the connection.
Simple plastic methods of analysis are generally applicable.
Special considerations shall be given to the effect of:
3.7.2 Plastic force-deformation relationships including
elastic, axial flexibility
Relatively small axial displacements have a significant influence on the development of tensile forces in members undergoing large lateral deformations. An equivalent elastic, axial
stiffness may be defined as
Figure 3-8
Resistance curve for local denting
R
⎛w
= kc1 ⎜⎜ d
Rc
⎝ D
3.7 Force-deformation relationships for beams
—
—
—
—
—
—
6
0
The curves are inaccurate for small indentation, and they
should not be used to verify a design where the dent damage is
required to be less than wd / D > 0.05.
The width of contact area is in theory equal to the height of the
vertical, plane section of the ship side that is assumed to be in
contact with the tubular member. For large widths, and
depending on the relative rigidity of the cross-section and the
ship side, it may be unrealistic to assume that the tube is subjected to flattening over the entire contact area. In lieu of more
accurate calculations it is proposed that the width of contact
area be taken equal to the diameter of the hit cross-section (i.e.
B/D = 1).
knode = axial stiffness of the node with the considered member removed. This may be determined by introducing unit loads in member axis direction at the end
nodes with the member removed.
Plastic force-deformation relationship for a central collision
(midway between nodes) may be obtained from:
— Figure 3-9 for tubular members
— Figure 3-10 for stiffened plates in lieu of more accurate
analysis.
N Sd
< 0.6
N Rd
0.6 ≤
N Sd
N Rd
The following notation applies:
R0 =
w=
NSd
NRd
B
wd
=
=
=
=
(3.7)
design axial compressive force
design axial compressive resistance
width of contactarea
dent depth
c=
4c1M P
l
w
c1 wc
4c 1 kw c
f y Al
c1 = 2
DET NORSKE VERITAS
plastic collapse resistance in bending for
the member, for the case that contact point
is at midspan
non-dimensional deformation
2
non-dimensional spring stiffness
for clamped beams
Recommended Practice DNV-RP-C204, October 2010
Page 15
c1 = 1
member the force-deformation relationship may be interpolated from the curves for pinned ends and clamped ends:
for pinned beams
wc =
D
2
characteristic deformation for tubular
beams
wc =
1 .2 WP
A
characteristic deformation for stiffened
plating
where
0≤ξ=
WP
=
plastic section modulus
l
=
member length
R = ζR clamped + (1 − ζ) R pinned
(3.8)
actual
For non-central collisions the force-deformation relationship
may be taken as the mean value of the force-deformation
curves for central collision with member half length equal to
the smaller and the larger portion of the member length,
respectively.
For members where the plastic moment capacity of adjacent
members is smaller than the moment capacity of the impacted
member the force-deformation relationship may be interpolated from the curves for pinned ends and clamped ends:
For non-central collisions the force-deformation relationship
may be taken as the mean value of the force-deformation
curves for central collision with member half length equal to
the smaller and the larger portion of the member length,
respectively.
For members where the plastic moment capacity of adjacent
members is smaller than the moment capacity of the impacted
R0
R0
R0
−1 ≤ 1
MP
4
l
actual
actual
(3.9)
resistance by bending action of beam account= Plastic
ing for actual bending resistance of adjacent members
=
4M P + 2M P1 + 2M P2
l
(3.10)
M Pj = ∑ M Pj,i ≤ M P
(3.11)
i
i
= adjacent member no i
j
= end number {1,2}
MPj,i = Plastic bending resistance for member number i at
end j.
Elastic, rotational flexibility of the node is normally of moderate significance.
6,5
6
5,5
5
4,5
4
R/R0
Bending & membrane
Membrane only
0.2
0,3
3,5
F
0.1
(collision load)
0.5
3
2,5
c =∞
2
k
1
w
0.05
1,5
1
0,5
0
0
0,5
1
1,5
2
2,5
3
3,5
w
Deformation
Figure 3-9
Force-deformation relationship for tubular beam with axial flexibility
DET NORSKE VERITAS
k
4
Recommended Practice DNV-RP-C204, October 2010
Page 16
5
4,5
4
Bending & membrane
Membrane only
3,5
R/R0
3
F
0.1
2,5
0.2
0.5
c =∞
2
k
k
w
1
1,5
(collision load)
0
1
0,5
0
0
0,5
1
1,5
Deformation
2
2,5
3
3,5
4
w
Figure 3-10
Force-deformation relationship for stiffened plate with axial flexibility
3.7.3 Support capacity smaller than plastic bending
moment of the beam
For beams where the plastic moment capacity of adjacent
members is smaller than the moment capacity of the impacted
beam, the force-deformation relationship, R*, may be derived
from the resistance curve, R, for beams where the plastic
moment capacity of adjacent members is larger than the
moment capacity of the impacted beam (Section 3.7.2), using
the expression:
R = R + (R 0 − R )
*
*
0
w
w lim
,
w
w lim
(3.12)
w
R* = R
≤ 1 .0
w lim
≥ 1.0
where
R0 = Plastic bending resistance with clamped ends (c1 = 2)
– moment capacity of adjacent members larger than
the plastic bending moment of the beam
*
R 0 = Plastic bending resistance - moment capacity of adjacent members at one or both ends smaller than the plastic bending moment of the beam
i
=
j
=
MPj,i=
wlim =
adjacent member no i
end number {1,2}
Plastic bending resistance for member no. i
limiting non-dimensional deformation where the
membrane force attains yield, i.e. the resistance curve,
R, with actual spring stiffness coefficient, c, intersects
with the curve for c = ∞. If c = ∞, w lim = π w for
2
tubular beams and wlim = 1.2 w for stiffened plate
3.7.4 Bending capacity of dented tubular members
The reduction in plastic moment capacity due to local denting
shall be considered for members in compression or moderate
tension, but can be neglected for members entering the fully
plastic membrane state.
Conservatively, the flat part of the dented section according to
the model shown in Figure 3-11 may be assumed non-effective. This gives:
M red
θ 1
= cos − sinθ
MP
2 2
M P = f y D2 t
⎛ 2w d ⎞
θ = arccos⎜1 −
⎟
D ⎠
⎝
wd = dent depth as defined in Figure 3-11.
4M P + 2M P1 + 2M P2
R *0 =
l
(3.13)
M Pj = ∑ M Pj,i ≤ M P
(3.14)
i
DET NORSKE VERITAS
(3.15)
Recommended Practice DNV-RP-C204, October 2010
Page 17
1
wd
0,8
Mred/MP
D
0,6
0,4
0,2
0
0
0,2
0,4
0,6
0,8
1
occur when the tensile strain due to the combined effect of
rotation and membrane elongation exceeds a critical value.
To ensure that members with small axial restraint maintain
moment capacity during significant plastic rotation it is recommended that cross-sections be proportioned to section type I
requirements, defined in DNV-OS-C101.
Initiation of local buckling does, however, not necessarily
imply that the capacity with respect to energy dissipation is
exhausted, particularly for type I and type II cross-sections.
The degradation of the cross-sectional resistance in the postbuckling range may be taken into account provided that such
information is available, refer Ch.8, Comm. 3.10.1.
For members undergoing membrane stretching a lower bound
to the post-buckling load-carrying capacity may be obtained
by using the load-deformation curve for pure membrane
action.
3.10.2 Local buckling
Tubular cross-sections:
Buckling does not need to be considered for a beam with axial
restraints if the following condition is fulfilled:
wd/D
Figure 3-11
Reduction of moment capacity due to local dent
3.8 Strength of connections
Provided that large plastic strains can develop in the impacted
member, the strength of the connections that the member
frames into should be checked.
The resistance of connections should be taken from ULS
requirements in relevant standards.
For braces reaching the fully plastic tension state, the connection shall be checked for a load equal to the axial capacity of
the member. The design axial stress shall be assumed equal to
the ultimate tensile strength of the material.
If the axial force in a tension member becomes equal to the
axial capacity of the connection, the connection has to undergo
gross deformations. The energy dissipation will be limited and
rupture should be considered at a given deformation. A safe
approach is to assume failure (disconnection of the member)
once the axial force in the member reaches the axial capacity
of the connection.
If the capacity of the connection is exceeded in compression
and bending, this does not necessarily mean failure of the
member. The post-collapse strength of the connection may be
taken into account provided that such information is available.
3.9 Strength of adjacent structure
The strength of structural members adjacent to the impacted
member/sub-structure must be checked to see whether they
can provide the support required by the assumed collapse
mechanism. If the adjacent structure fails, the collapse mechanism must be modified accordingly. Since, the physical behaviour becomes more complex with mechanisms consisting of an
increasing number of members it is recommended to consider
a design which involves as few members as possible for each
collision scenario.
3.10 Ductility limits
3.10.1 General
The maximum energy that the impacted member can dissipate
will – ultimately - be limited by local buckling on the compressive side or fracture on the tensile side of cross-sections undergoing finite rotation.
If the member is restrained against inward axial displacement,
any local buckling must take place before the tensile strain due
to membrane elongation overrides the effect of rotation
induced compressive strain.
If local buckling does not take place, fracture is assumed to
⎛ 14c f f y
β≤⎜
⎜ c1
⎝
1
⎛ κl ⎞
⎜ ⎟
⎜d ⎟
⎝ c⎠
2
⎞3
⎟
⎟
⎠
(3.16)
where
β=
Dt
235 f y
(3.17)
axial flexibility factor
⎛
c ⎞⎟
cf = ⎜
⎜1 + c ⎟
⎠
⎝
dc
=
=
=
=
=
c1
c
2
(3.18)
characteristic dimension
D for circular cross-sections
2 for clamped ends
1 for pinned ends
non-dimensional spring stiffness, refer Section 3.7.2.
κ l ≤ 0.5 l = the smaller distance from location of collision
load to adjacent joint
If this condition is not met, buckling may be assumed to occur
when the lateral deformation exceeds
⎛
14c f f y
w
1 ⎜
=
1− 1−
d c 2c f ⎜⎜
c 1β 3
⎝
2 ⎞
⎛ κl ⎞ ⎟
⎜ ⎟ ⎟
⎜d ⎟
⎝ c⎠ ⎟
⎠
(3.19)
For small axial restraint (c < 0.05) the critical deformation may
be taken as
w 3.5f y
=
dc
c 1β 3
⎛ κl ⎞
⎜ ⎟
⎜d ⎟
⎝ c⎠
2
(3.20)
Stiffened plates/ I/H-profiles:
In lieu of more accurate calculations the expressions given for
circular profiles in Equation (3.19) and (3.20) may be used
with
dc =
characteristic dimension for local buckling, equal
to twice the distance from the plastic neutral axis in
bending to the extreme fibre of the cross-section
= h height of cross-section for symmetric I –profiles
= 2hw for stiffened plating (for simplicity)
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 18
For flanges subjected to compression;
β = 2.5
bf t f
bf t f
β=3
type I cross-sections
235 f y
235 f y
type II and type III cross-sections
(3.21)
(3.22)
For webs subjected to bending
β = 0.7
β = 0.8
bf
tf
hw
tw
=
=
=
=
hw tw
type I cross-sections
235 f y
hw tw
235 f y
type I and type III cross-sections
(3.23)
(3.24)
3.10.4 Tensile fracture in yield hinges
When the force deformation relationships for beams given in
Section 3.7.2 are used rupture may be assumed to occur when
the deformation exceeds a value given by
⎞
4c c ε
c ⎛
w
= 1 ⎜ 1 + w f cr − 1⎟
⎜
⎟
d c 2c f ⎝
c1
⎠
where the following factors are defined;
Displacement factor
1
cw =
c1
⎛ ⎛ 1 ⎞ ⎛
⎜ c lp ⎜1 − c lp ⎟ + 4⎜1 − W
⎜ ⎝ 3 ⎠ ⎜ W
P
⎝
⎝
—
—
—
—
⎛
c ⎞⎟
cf = ⎜
⎜1+ c ⎟
⎝
⎠
material toughness
presence of defects
strain rate
presence of strain concentrations
The critical strain for plastic deformations of sections containing defects need to be determined based on fracture mechanics
methods. Welds normally contain defects and welded joints
are likely to achieve lower toughness than the parent material.
For these reasons structures that need to undergo large plastic
deformations should be designed in such a way that the plastic
straining takes place outside the weld. In ordinary full penetration welds, the overmatching weld material will ensure that
minimal plastic straining occurs in the welded joints even in
cases with yielding of the gross cross section of the member.
In such situations, the critical strain will be in the parent material and will be dependent upon the following parameters:
stress gradients
dimensions of the cross section
presence of strain concentrations
material yield to tensile strength ratio
material ductility
Simple plastic theory does not provide information on strains
as such. Therefore, strain levels should be assessed by means
of adequate analytic models of the strain distributions in the
plastic zones or by non-linear finite element analysis with a
sufficiently detailed mesh in the plastic zones. (For information about mesh size see Ch.8, Comm. 3.10.4.)
When structures are designed so that yielding take place in the
parent material, the following value for the critical average
strain in axially loaded plate material may be used in conjunction with nonlinear finite element analysis or simple plastic
analysis
t
l
where:
t
l
= plate thickness
= length of plastic zone. Minimum 5t
⎞ ⎛ κl ⎞
⎟⎜ ⎟
⎟⎜d ⎟
⎠⎝ c ⎠
⎛ ε cr
⎞ W
⎜
− 1⎟
H
⎜ εy
⎟ WP
⎝
⎠
c lp =
⎛ ε cr
⎞ W
⎜
− 1⎟
H +1
⎜ εy
⎟ WP
⎝
⎠
axial flexibility factor
ε cr = 0.02 + 0.65
⎞ εy
⎟⎟
⎠ ε cr
2
(3.27)
plastic zone length factor
flange width
flange thickness
web height
web thickness
3.10.3 Tensile fracture
The degree of plastic deformation or critical strain at fracture
will show a significant scatter and depends upon the following
factors:
—
—
—
—
—
(3.26)
(3.25)
(3.28)
2
(3.29)
non-dimensional plastic stiffness
H=
Ep
E
=
c1
1 ⎛⎜ f cr − f y ⎞⎟
E ⎜⎝ ε cr − ε y ⎟⎠
c
=
=
=
κl
≤
W
WP
εcr
=
=
=
εy =
fy
E
fy
fcr
(3.30)
2 for clamped ends
1 for pinned ends
non-dimensional spring stiffness, refer Section 3.7.2
0.5 l the smaller distance from location of
collision load to adjacent joint
elastic section modulus
plastic section modulus
critical strain for rupture (see Table 3-4 for
recommended values)
=
yield strain
=
=
yield strength
strength corresponding to εcr
The characteristic dimension shall be taken as:
dc
= D
= 2hw
= h
= 2 (h − zplast)
diameter of tubular beams
twice the web height for stiffened
plates (se·t > As)
height of cross-section for symmetric I-profiles
for unsymmetrical I-profiles
zplast = smaller distance from flange to plastic neutral axis of
cross-section
For small axial restraint (c < 0.05) the critical deformation may
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 19
be taken as
w
= c w ε cr
dc
(3.31)
The critical strain εcr and corresponding strength fcr should be
selected so that idealised bi-linear stress-strain relation gives
reasonable results, see Ch.8, Commentary. For typical steel
material grades the following values are proposed:
Table 3-4 Proposed values for εcr and H for different steel
grades
Steel grade
εcr
H
S 235
20 %
0.0022
S 355
15 %
0.0034
S 460
10 %
0.0034
3.11 Resistance of large diameter, stiffened columns
3.11.1 General
Impact on a ring stiffener as well as midway between ring stiffeners shall be considered.
Plastic methods of analysis are generally applicable.
3.11.2 Longitudinal stiffeners
For ductile design the resistance of longitudinal stiffeners in
the beam mode of deformation can be calculated using the procedure described for stiffened plating, Section 3.7.
For strength design against stern corner impact, the plastic
bending moment capacity of the longitudinal stiffeners has to
comply with the requirement given in Figure 3-12, on the
assumption that the entire load given in Table 3-1 is taken by
one stiffener.
Plastic bending capacity
(MNm)
3
2
1
0
1
2
3
(3.32)
where
wc =
WP
Ae
3.12 Energy dissipation in floating production vessels
For strength design the side or stern shall resist crushing force
of the bow of the off-take tanker. In lieu of more accurate calculations the force-deformation curve given in Section 3.5.2
may be applied. (See Ch.8, Comm. 3.12 on strength design of
stern structure)
For ductile design the resistance of stiffened plating in the
beam mode of deformation can be calculated using the procedure described in Section 3.7.2. (See Ch.8, Comm. 3.12 on
resistance of stiffened plating)
3.13 Global integrity during impact
Normally, it is unlikely that the installation will turn into a global collapse mechanism under direct collision load, because
the collision load is typically an order of magnitude smaller
than the resultant design wave force.
Linear analysis often suffices to check that global integrity is
maintained.
The installation should be checked for the maximum collision
force.
For installations responding predominantly statically the maximum collision force occurs at maximum deformation.
For structures responding predominantly impulsively the maximum collision force occurs at small global deformation of the
platform. An upper bound to the collision force is to assume
that the installation is fixed with respect to global displacement. (e.g. jack-up fixed with respect to deck displacement).
4.1 General
3.11.3 Ring stiffeners
In lieu of more accurate analysis the plastic collapse load of a
ring-stiffener can be estimated from:
wc D
3.11.4 Decks and bulkheads
Calculation of energy dissipation in decks and bulkheads has
to be based upon recognised methods for plastic analysis of
deep, axial crushing. It shall be documented that the collapse
mechanisms assumed yield a realistic representation of the true
deformation field.
4. Dropped Objects
Figure 3-12
Required bending capacity of longitudinal stiffeners
4 2M P
Effective flange of shell plating: Use effective flange of stiffened plates, see Chapter 6.
For ductile design it can be assumed that the resistance of the
ring stiffener is constant and equal to the plastic collapse load,
provided that requirements for stability of cross-sections are
complied with, refer Section 3.10.2.
4
Distance between ring stiffeners (m)
F0 =
effective shell flange
WP = plastic section modulus of ring stiffener including
effective shell flange
Ae = area of ring stiffener including effective shell flange
=characteristic deformation of ring stiffener
D = column radius
MP = plastic bending resistance of ring-stiffener including
The dropped object load is characterised by a kinetic energy,
governed by the mass of the object, including any hydrodynamic added mass, and the velocity of the object at the instantof impact. In most cases the major part of the kinetic energy
has to be dissipated as strain energy in the impacted component
and, possibly, in the dropped object. Generally, this involves
large plastic strains and significant structural damage to the
impacted component. The strain energy dissipation is estimated from force-deformation relationships for the component
and the object, where the deformations in the component shall
comply with ductility and stability requirements.
The load bearing function of the installation shall remain intact
with the damages imposed by the dropped object load. In addition, damaged condition should be checked if relevant, see
Section 2.2.
Dropped objects are rarely critical to the global integrity of the
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 20
installation and will mostly cause local damages. The major
threat to global integrity is probably puncturing of buoyancy
tanks, which could impair the hydrostatic stability of floating
installations. Puncturing of a single tank is normally covered
by the general requirements to compartmentation and watertight integrity given in DNV-OS-C301.
The structural effects from dropped objects may either be
determined by non-linear dynamic finite element analyses or
by energy considerations combined with simple elastic-plastic
methods as given in Sections 4.2 - 4.5.
If non-linear dynamic finite element analysis is applied all
effects described in the following paragraphs shall either be
implicitly covered by the modelling adopted or subjected to
special considerations, whenever relevant.
4.2 Impact velocity
The kinetic energy of a falling object is given by:
E kin =
1
mv 2
2
(in air)
and
E kin =
a
1
(m + a )v 2 (in water)
2
(4.2)
= hydrodynamic added mass for considered motion
For impacts in air the velocity is given by
(4.3)
v = 2gs
s
v
= travelled distance from drop point
= vo at sea surface
For objects falling rectilinearly in water the velocity depends
upon the reduction of speed during impact with water and the
falling distance relative to the characteristic distance for the
object.
(4.1)
-3
In air
-2
Velocity [v/vt]
-1
0
0,5
1
1,5
2
2,5
3
3,5
4
s
Distance [s/sc]
0
1
2
In water
3
4
5
6
7
Figure 4-1
Velocity profile for objects falling in water
The loss of momentum during impact with water is given by
mΔv = ∫ d F(t)dt
t
(4.4)
0
F(t) = force during impact with sea surface
After the impact with water the object proceeds with the speed
v = v 0 − Δv
Assuming that the hydrodynamic resistance during fall in
water is of drag type the velocity in water can be taken from
Figure 4-1 where
2g(m − ρ w V)
vt =
ρ w Cd A p
terminal velocity for the
= object (drag force and
buoyancy force balance the
gravity force)
m+a
sc =
=
ρ w Cd A p
a
)
m = characteristic distance
ρ V
2g(1 − w )
m
v t 2 (1 +
ρw = density of sea water
Cd = hydrodynamic drag coefficient for the object in the
considered motion
m = mass of object
Ap = projected cross-sectional area of the object
V = object displacement
The major uncertainty is associated with calculating the loss of
momentum during impact with sea surface, given by Equation
(4.4). However, if the travelled distance is such that the velocity is close to the terminal velocity, the impact with sea surface
is of little significance.
Typical terminal velocities for some typical objects are given
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 21
fy = characteristic yield strength
in Table 4-1.
Table 4-1 Terminal velocities for objects falling in water
Item
Mass
Terminal velocity
[kN]
[m/s]
Drill collar
28
23-24
Winch,
250
Riser pump
100
BOP annular preventer
50
16
Mud pump
330
7
c = −e
⎛ d ⎞
− 2.5⎜⎜ 1− ⎟⎟
⎝ 2r ⎠
R = πdtτ = contact force for τ ≤τ cr refer Section 4.5.1 for τ cr
Rectilinear motion is likely for blunt objects and objects which
do not rotate about their longitudinal axis. Bar-like objects
(e.g. pipes) which do not rotate about their longitudinal axis
may execute lateral, damped oscillatory motions as illustrated
in Figure 4-1.
m i = ρ p πr 2 t
= mass of plate enclosed by hinge circle
m
ρp
d
= mass of dropped object
= mass density of steel plate
= smaller diameter at threaded end of drill
collar
= smaller distance from the point of impact to
the plate boundary defined by adjacent
stiffeners/girders, refer Figure 4-3.
r
4.3 Dissipation of strain energy
The structural response of the dropped object and the impacted
component can formally be represented as load-deformation
relationships as illustrated in Figure 4-2. The part of the impact
energy dissipated as strain energy equals the total area under
the load-deformation curves.
E s = E s,o + E s,i = ∫
w o, max
0
R o dw o + ∫
w i , max
0
(4.5)
R i dw i
As the load level is not known a priori an incremental approach
is generally required.
Often the object can be assumed to be infinitely rigid (e.g. axial
impact from pipes and massive objects) so that all energy is to
be dissipated by the impacted component.
Ro
Ri
dwo
Object
Installation
r
r
r
Figure 4-3
Definition of distance to plate boundary
4.4.2 Stiffeners/girders
In lieu of more accurate calculations stiffeners and girders subjected to impact with blunt objects may be analysed with
resistance models given in Section 6.10.
4.4.3 Dropped object
Calculation of energy dissipation in deformable dropped
objects shall be based upon recognised methods for plastic
analysis. It shall be documented that the collapse mechanisms
assumed yield a realistic representation of the true deformation
field.
Es,i
Es,o
For validity range of design formula reference is given to Ch.8,
Comm. 4.4.1.
4.5 Limits for energy dissipation
dwi
Figure 4-2
Dissipation of strain energy in dropped object and installation
4.5.1 Pipes on plated structures
The maximum shear stress for plugging of plates due to drill
collar impacts may be taken as
If the object is assumed to be deformable, the interactive nature
of the deformation of the two structures should be recognised.
t⎞
⎛
τ cr = f u ⎜ 0.42 + 0.41 ⎟
d
⎝
⎠
4.4 Resistance/energy dissipation
f u = ultimate material tensile strength
4.4.1 Stiffened plates subjected to drill collar impact
The energy dissipated in the plating subjected to drill collar
impact is given by
4.5.2 Blunt objects
For stability of cross-sections and tensile fracture, refer Section 3.10.
E sp
m ⎞
R2 ⎛
=
⎜1 + 0.48 i ⎟⎟
⎜
2k ⎝
m ⎠
(4.7)
2
(4.6)
5.1 General
where:
⎛
⎜ 1 + 5 d − 6c 2 + 6.25⎛⎜ d ⎞⎟
⎜
1
r
⎝ 2r ⎠
k = πf y t ⎜
2
2
(1 + c)
⎜
⎜
⎝
5. Fire
2
⎞
⎟
⎟ : stiffness of plate
⎟ enclosed by hinge circle
⎟
⎟
⎠
The characteristic fire structural load is temperature rise in
exposed members. The temporal and spatial variation of temperature depends on the fire intensity, whether or not the structural members are fully or partly engulfed by the flame and to
what extent the members are insulated.
Structural steel expands at elevated temperatures and internal
stresses are developed in redundant structures. These stresses
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 22
are most often of moderate significance with respect to global
integrity. The heating causes also progressive loss of strength
and stiffness and is, in redundant structures, accompanied by
redistribution of forces from members with low strength to
members that retain their load bearing capacity. A substantial
loss of load-bearing capacity of individual members and subassemblies may take place, but the load bearing function of the
installation shall remain intact during exposure to the fire load.
In addition, damaged condition should be checked if relevant,
see Section 2.2.
Structural analysis may be performed on either
tions compressive members shall be modelled with an initial,
sinusoidal imperfection with amplitude given by
Elastic-perfectly plastic material model, refer Figure 6-4 :
e* 1
=
l π
Elasto-plastic material models, refer Figure 6-4 :
e* W 1
=
W π
l
p
— individual members
— subassemblies
— entire system
fy i
α
E z0
fy i
α =
E z0
1
f y Wp
π
E
AI
α
α
The assessment of fire load effect and mechanical response
shall be based on either
— simple calculation methods applied to individual members,
— general calculation methods,
or a combination.
Simple calculation methods may give overly conservative
results. General calculation methods are methods in which
engineering principles are applied in a realistic manner to specific applications.
Assessment of individual members by means of simple calculation methods should be based upon the provisions given in
Ch.7 /2/ Eurocode 3 Part 1.2. /2/ .
Assessment by means of general calculation methods shall satisfy the provisions given in Ch.7 /2/ Eurocode 3 Part1.2, Section 4.3.
In addition, the requirements given in this section for mechanical response analysis with nonlinear finite element methods
shall be complied with.
Assessment of ultimate strength is not needed if the maximum
steel temperature is below 400°C, but deformation criteria may
have to be checked for impairment of main safety functions.
5.2 General calculation methods
Structural analysis methods for non-linear, ultimate strength
assessment may be classified as
— stress-strain based methods
— stress-resultants based (yield/plastic hinge) methods
Stress-strain based methods are methods where non-linear
material behaviour is accounted for on fibre level.
Stress-resultants based methods are methods where non-linear
material behaviour is accounted for on stress-resultants level
based upon closed form solutions/interaction equation for
cross-sectional forces and moments.
5.3 Material modelling
In stress-strain based analysis temperature dependent stressstrain relationships given in Ch.7 /2/ Eurocode 3, Part 1.2, Section 3.2 may be used.
For stress resultants based design the temperature reduction of
the elastic modulus may be taken as kE,θ according to Ch.7 /
2/ Eurocode 3. The yield stress may be taken equal to the effective yield stress, fy,θ. The temperature reduction of the effective yield stress may be taken as ky,θ.
Provided that the above requirements are complied with creep
does need explicit consideration.
5.4 Equivalent imperfections
To account for the effect of residual stresses and lateral distor-
= 0.5 for fire exposed members according to column
curve c, Ch.7 /2/ Eurocode 3
i
= radius of gyration
z0 = distance from neutral axis to extreme fibre of crosssection
WP = plastic section modulus
W = elastic section modulus
A = cross-sectional area
I
= moment of inertia
e* = amplitude of initial distortion
l = member length
The initial out-of-straightness should be applied on each physical member. If the member is modelled by several finite elements the initial out-of-straightness should be applied as
displaced nodes.
The initial out-of-straightness shall be applied in the same
direction as the deformations caused by the temperature gradients.
5.5 Empirical correction factor
The empirical correction factor of 1.2 should be accounted for
in calculating the critical strength in compression and bending
for design according to Ch.7 /2/ Eurocode 3, refer Ch.8,
Comm. A.5.5.
5.6 Local cross sectional buckling
If shell modelling is used, it shall be verified that the software
and the modelling is capable of predicting local buckling with
sufficient accuracy. If necessary, local shell imperfections
have to be introduced in a similar manner to the approach
adopted for lateral distortion of beams
If beam modelling is used local cross-sectional buckling shall
be given explicit consideration.
In lieu of more accurate analysis cross-sections subjected to
plastic deformations shall satisfy compactness requirements
given in DNV-OS-C101:
type I:
Locations with plastic hinges (approximately full
plastic utilization)
type II: Locations with yield hinges (partial plastification)
If this criterion is not complied with explicit considerations
shall be performed. The load-bearing capacity will be reduced
significantly after the onset of buckling, but may still be significant. A conservative approach is to remove the member from
further analysis.
Compactness requirements for type I and type I cross-sections
may be disregarded provided that the member is capable of
developing significant membrane forces.
5.7 Ductility limits
5.7.1 General
The ductility of beams and connections increase at elevated
temperatures compared to normal conditions. Little informa-
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 23
tion exists.
5.7.2 Beams in bending
In lieu of more accurate analysis requirements given in Section
3.10 shall be complied with.
5.7.3 Beams in tension
In lieu of more accurate analysis an average elongation of 3%
of the member length with a reasonably uniform temperature
can be assumed.
Local temperature peaks may localise plastic strains. It is considered to be to the conservative side to use critical strains for
steel under normal temperatures. See Section 3.10 and 3.10.4.
5.8 Capacity of connections
The load bearing function of the installation shall remain intact
with the damages imposed by the explosion loads. In addition,
damaged condition should be checked if relevant, see Section
2.2.
6.2 Classification of response
The response of structural components can conveniently be
classified into three categories according to the duration of the
explosion pressure pulse, td, relative to the fundamental period
of vibration of the component, T:
Impulsive domain
Dynamic domain
Quasi-static domain
td/T < 0.3
0.3 < td/T < 3
3 < td/T
In lieu of more accurate calculations the capacity of the connection can be taken as:
Rθ = ky,θ R0
where
Impulsive domain:
The response is governed by the impulse defined by
R0 = capacity of connection at normal temperature
ky,θ = temperature reduction of effective yield stress for maximum temperature in connection
Hence, the structure may resist a very high peak pressure provided that the duration is sufficiently small. The maximum
deformation, wmax, of the component can be calculated iteratively from the equation
6. Explosions
I = 2m eq ∫
I = ∫ F(t )dt
td
(6.1)
0
w max
0
6.1 General
Explosion loads are characterised by temporal and spatial pressure distribution. The most important temporal parameters are
rise time, maximum pressure and pulse duration.
For components and sub-structures the explosion pressure
shall normally be considered uniformly distributed. On global
level the spatial distribution is normally non-uniform both with
respect to pressure and duration.
The response to explosion loads may either be determined by
non-linear dynamic finite element analysis or by simple calculation models based on Single Degree Of Freedom (SDOF)
analogies and elastic-plastic methods of analysis.
If non-linear dynamic finite element analysis is applied all
effects described in the following paragraphs shall either be
implicitly covered by the modelling adopted or subjected to
special considerations, whenever relevant.
In the simple calculation models the component is transformed
to a single spring-mass system exposed to an equivalent load
pulse by means of suitable shape functions for the displacements in the elastic and elastic-plastic range. The shape functions allow calculation of the characteristic resistance curve
and equivalent mass in the elastic and elastic-plastic range as
well as the fundamental period of vibration for the SDOF system in the elastic range.
Provided that the temporal variation of the pressure can be
assumed to be triangular, the maximum displacement of the
component can be calculated from design charts for the SDOF
system as a function of pressure duration versus fundamental
period of vibration and equivalent load amplitude versus maximum resistance in the elastic range. The maximum displacement must comply with ductility and stability requirements for
the component.
R (w )dw
(6.2)
where
R(w)= force-deformation relationship for the component
meq = equivalent mass for the component.
Quasi-static-domain:
The response is governed by the peak pressure and the rise
time of the pressure relative to the fundamental period of vibration. If the rise time is small the maximum deformation of the
component can be solved iteratively from the equation:
w max =
1
Fmax
∫
w max
0
R (w )dw
(6.3)
If the rise time is large the maximum deformation can be
solved from the static condition
Fmax = R(w max )
(6.4)
Dynamic domain:
The response has to be solved from numerical integration of
the dynamic equations of equilibrium.
6.3 Recommended analysis models for stiffened panels
Various failure modes for a stiffened panel are illustrated in
Figure 6-1. Suggested analysis model and reference to applicable resistance functions are listed in Table 6.1. Application of
a Single Degree of Freedom (SDOF) model in the analysis of
stiffeners/girders with effective flange is implicitly based on
the assumption that dynamic interaction between the plate
flange and the profile can be neglected.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 24
Figure 6-1
Failure modes for two-way stiffened panel
Table 6-1 Analysis models
Failure mode
Elastic-plastic deformation of plate
Stiffener plastic
– plate elastic
Stiffener plastic
– plate plastic
Girder plastic
– stiffener and plating elastic
Girder plastic
– stiffener elastic
– plate plastic
Girder and stiffener plastic
– plate elastic
Simplified
analysis model Resistance models
SDOF
Section 6.9
SDOF
Stiffener: Section 6.10.1-2.
Plate: Section 6.9.1
SDOF
Stiffener: Section 6.10.1-2.
Plate: Section 6.9
SDOF
Girder: Section 6.10.1-2
Plate: Section 6.9
SDOF
Girder: Section 6.10.1-2
Plate: Section 6.9
MDOF
Comment
Elastic, effective flange of plate
Effective width of plate at mid span. Elastic, effective
flange of plate at ends.
Elastic, effective flange of plate with concentrated loads
(stiffener reactions). Stiffener mass included.
Effective width of plate at girder mid span and ends.
Stiffener mass included
Girder and stiffener:
Dynamic reactions of stiffeners
→ loading for girders
Section 6.10.1-2
Plate: Section 6.9
Girder and stiffener plastic
MDOF
Girder and stiffener:
Dynamic reactions of stiffeners
→ loading for girders
– plate plastic
Section 6.10.1-2
Plate: Section 6.9
By girder/stiffener plastic is understood that the maximum displacement wmax exceeds the elastic limit wel
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 25
6.4 SDOF system analogy
Biggs method:
For many practical design problems it is convenient to assume
that the structure - exposed to the dynamic pressure pulse - ultimately attains a deformed configuration comparable to the
static deformation pattern. Using the static deformation pattern
as displacement shape function, i.e.
m&y& + ky = f (t )
(6.5)
φ(x)
y(t)
m = ∫ mφ(x ) dx + ∑ M i φ i
2
2
= displacement shape function
= displacement amplitude
= generalized mass
i
f ( t ) = ∫ q(t)φ(x )dx + ∑ Fi φ i
= generalized load
k = ∫ EIφ , xx (x ) dx
= generalized elastic bending stiffness
2
l
k=0
k = ∫ Nφ , x (x ) dx
2
l
m
Mi
q
Fi
xi
= generalized plastic bending stiffness
(fully developed mechanism)
= generalized membrane
stiffness
(fully plastic: N = NP)
= distributed mass
= concentrated mass
= explosion load
= concentrated load (e.g.
support reactions)
= position of concentrated
mass/load
φ i = φ (x = x i )
The equilibrium equation can alternatively be expressed as:
(K l m, u M u + K l m,c M c )&y& + K(y)y = F(t)
(6.6)
where
K m,u =
K m,u
= load-mass transformation factor
for uniform mass
Kl
K m,u
transformation factor
= load-mass
for concentrated mass
Kl
∫ mϕ (x)
l
Mu
∑M ϕ
i
K m,c =
M
i
Mc
2
i
= load transformation factor for
concentrated load
i
F
= total uniformly, distributed mass
dx
=
c
∑M
i
= total concentrated mass
i
F = ∫ qdx
load in case of uniformly
= total
distributed load
l
F=
∑F
load in case of concentrated
= total
load
k
kl
= equivalent stiffness
i
i
ke =
T = 2π
= mass transformation factor for uniform mass
mass transformation factor for
= concentrated mass
m
k
= 2π
K l m, u M u + K l m,c M c
ke
(6.7)
The response, y(t), is - in addition to the load history - entirely
governed by the total mass, load-mass factor and the characteristic stiffness.
For a linear system, the load mass factor and the characteristic
stiffness are constant k = k1. The response is then alternatively
governed by the eigenperiod and the characteristic stiffness.
For a non-linear system, the load-mass factor and the characteristic stiffness depend on the response (deformations). Nonlinear systems may often conveniently be approximated by
equivalent bi-linear or tri-linear systems, see Section 6.8. In
such cases the response can be expressed in terms of (see Figure 6-6 for definitions):
k1
= characteristic stiffness in the initial, linear resistance
domain
yel = displacement at the end of the initial, linear resistance
domain
T = eigenperiod in the initial, linear resistance domain
and, if relevant,
k3
2
∑i F ϕ
The natural period of vibration for the equivalent system in the
linear resistance domain is given by
i
l
K l m,u =
F
load transformation factor for
= uniformly distributed load
l
the dynamic equations of equilibrium can be transformed to an
equivalent single degree of freedom system:
K l m,u =
Kl =
l
M u = ∫ mdx
w (x , t ) = φ(x )y(t )
l
Kl =
∫ qϕ (x)dx
= normalised characteristic resistance in the third linear
resistance domain.
Characteristic stiffness is given explicitly or can be derived
from load-deformation relationships given in Section 6.10. If
the response is governed by different mechanical behaviour
relevant characteristic stiffness must be calculated.
For a given explosion load history the maximum displacement,
ymax, is found by analytical or numerical integration of equation (6.6).
For standard load histories and standard resistance curves
maximum displacements can be presented in design charts.
Figure 6-2 shows the normalised maximum displacement of a
SDOF system with a bi- (k3 = 0) or tri-linear (k3 > 0) resistance
function, exposed to a triangular pressure pulse with zero rise
time. When the duration of the pressure pulse relative to the
eigenperiod in the initial, linear resistance range is known, the
maximum displacement can be determined directly from the
diagram as illustrated in Figure 6-2.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 26
100
Static asymptote, k 3=0.2k 1
10
Impulsive asymptote, k 3=0.2k 1
k 3=0.1k 1
k 3=0.2k 1
ymax/yel
for system
Elastic-perfectly plastic, k 3=0
1
td/T for system
F(t)
td
0,1
0,1
1
td/T
10
Figure 6-2
Maximum response a SDOF system to a triangular pressure pulse with zero rise time. Fmax / Rel = 2
Design charts for systems with bi- or tri-linear resistance
curves subjected to a triangular pressure pulse with 0.5 td rise
time is given in Figure 6.3. Curves for different rise times are
given in Ch.8, Commentary Figure 8-15 to Figure 8-17.
Baker's method
The governing equations (6.1) and (6.2) for the maximum
response in the impulsive domain and the quasi-static domain
may also be used along with response charts for maximum displacement for different Fmax/Rel ratios to produce pressureimpulse (Fmax, I) diagrams - iso-damage curves - provided that
the maximum pressure is known.
The advantage of using iso-damage diagrams is that "backward" calculations are possible:
The diagram is established on the basis of the resistance curve.
The information may be used to screen explosion pressure histories and eliminate those that obviously lie in the admissible
domain. This will reduce the need for large complex simulation of explosion scenarios.
6.5 Dynamic response charts for SDOF system
Transformation factors for elastic–plastic-membrane deformation of beams and one-way slabs with different boundary conditions are given in Table 6-2.
Maximum displacement for a SDOF system exposed to a triangular pressure pulse with rise time of 0.5td is displayed in
Figure 6.3. Maximum displacement for a SDOF system
exposed to different pressure pulses are given in Ch.8, Commentary Figure 8-15 to Figure 8-17.
The characteristic response of the system is based upon the
resistance in the linear range, k = k1, where the equivalent stiffness is determined from the elastic solution to the actual system.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 27
Rel/Fmax=0.05
100
=0.1
= 0.3
= 0.5
= 0.6
= 0.7
Rel/Fmax= 0.8
ymax/yel
10
= 0.9
1
k3 = 0
k 3 = 0.1k1
k 3 = 0.2k 1
k 3 = 0.5k 1
F
R
Fmax
Rel
k3 = 0.5k1 =0.2k1
=0.1k1
= 1.0
= 1.1
= 1.2
= 1.5
k1
0.50td
td
yel
y
0.1
0.1
1
10
td/T
Figure 6-3
Dynamic response of a SDOF system to a triangular load (rise time = 0.50 td)
6.6 MDOF analysis
SDOF analysis of built-up structures (e.g. stiffeners supported
by girders) is admissible if
— the fundamental periods of elastic vibration are sufficiently separated
— the response of the component with the smallest eigenperiod does not enter the elastic-plastic domain so that the
period is drastically increased
If these conditions are not met, then significant interaction
between the different vibration modes is anticipated and a
multi degree of freedom analysis is required with simultaneous
time integration of the coupled system.
6.7 Classification of resistance properties
6.7.1 Cross-sectional behaviour
Moment
Elasto-plastic : The effect of partial yielding on bending
moment is accounted for
Elastic-perfectly plastic: Linear elastic up to fully plastic bending moment
The simple models described herein assume elastic-perfectly
plastic material behaviour.
Note: Even if the analysis is based upon elastic-perfectly plastic behaviour, the material has to exhibit strain hardening in
practice for the theory to be valid. The effect of strain hardening on the plastic, cross-sectional resistances may be
accounted for by using an equivalent (increased) yield stress.
If this is considered relevant, and the material is utilised
beyond ultimate strain, it is often justified to use an equivalent
yield stress equal to the mean of the lower yield stress and the
ultimate stress.
In the clauses for the ductility limits the effect of strain hardening is accounted for.
Elastic-perfectly plastic
elasto-plastic
Curvature
Figure 6-4
Bending moment-curvature relationships
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 28
Component behaviour
R
R
k1
k2
k1
w
k2
R
Elastic-plastic
(determinate)
k2
k3
k1
k1
w
Elastic
R
w
w
Elastic-plastic
(indeterminate)
Elastic-plastic
with membrane
Figure 6-5
Resistance curves
Elastic: Elastic material, small deformations
Elastic-plastic (determinate): Elastic-perfectly plastic material. Statically determinate system. Bending mechanism fully
developed with occurrence of first plastic hinge(s)/yield lines.
No axial restraint.
Elastic-plastic (indeterminate): Elastic perfectly plastic material. Statically indeterminate system. Bending mechanism
develops with sequential formation of plastic hinges/yield
lines. No axial restraint. For simplified analysis this system
may be modelled as an elastic-plastic (determinate) system
with equivalent initial stiffness. In lieu of more accurate analysis the equivalent stiffness should be determined such that the
area under the resistance curve is preserved.
Elastic-plastic with membrane: Elastic-perfectly plastic material. Statically determinate (or indeterminate). Ends restrained
against axial displacement. Increase in load-carrying capacity
caused by development of membrane forces.
6.8 Idealisation of resistance curves
The resistance curves in 6.7 are idealised. For simplified
SDOF analysis the resistance characteristics of a real non-linear system may be approximately modelled. An example with
a tri-linear approximation is illustrated in Figure 6-6. The stiffness in the k3 phase may have some contribution from strain
hardening, but in most cases the predominant effect is development of membrane forces when member ends are restrained
form inward displacement.
Elastic
k3
6.9.1 Elastic - rigid plastic relationships
In lieu of more accurate calculations rigid plastic theory combined with elastic theory may be used.
In the elastic range the stiffness and fundamental period of
vibration of a clamped plate under uniform lateral pressure can
be expressed as:
r = k1w
k1 = ψ
T=
= resistance-displacement relationship for
plate centre
D
s4
= plate stiffness
ρ ts 4
D
2π
η
(
t3
12 1 − ν 2
= natural period of vibration
)
= plate bending stiffness
The factors ψ and η are given in Figure 6-8.
k1
wel
Elastic-plastic with membrane
6.9 Resistance curves and transformation factors for
plates
k 2=0
Rel
Rigid-plastic
Figure 6-7
Construction of elastic -plastic resistance curve
D=E
R
=
+
800
40
700
35
600
ψ
w
500
400
25
20 η
ψ
300
Figure 6-6
Representation of a non-linear resistance by an equivalent tri-linear system
30
η
15
200
10
100
5
0
In lieu of more accurate analysis the resistance curve of elasticplastic systems may be composed by an elastic resistance and
a rigid-plastic resistance as illustrated in Figure 6-7.
0
1
1.5
Figure 6-8
Coefficients ψ and η.
DET NORSKE VERITAS
2
l/s
2.5
3
Recommended Practice DNV-RP-C204, October 2010
Page 29
In the plastic range the resistance (r) of plates with edges fully
restrained against inward displacement and subjected to uniform pressure can be taken as:
2 ⎛ α + (3 − 2α )
r
= 1 + w ⎜⎜
rc
⎝ 9 − 3α
2
⎞
⎟
⎟
⎠
w ≤1
(6.8)
⎛ α(2 − α ) ⎛ 1
⎞⎞
r
⎜
⎟⎟
= 2 w ⎜1 +
−
1
2
⎜
⎟⎟
⎜
rc
3
−
α
⎝ 3w
⎠⎠
⎝
Pinned ends:
6f t 2
w
w=2
rc = 2 y 2
t
l α
w >1
Clamped ends:
12f t 2
w
w=
rc = 2 y2
t
l α
2
⎛
⎞
s⎜
s⎟
⎛s⎞
α = ⎜ 3+⎜ ⎟ − ⎟
l⎜
l⎟
⎝l⎠
⎝
⎠
l (>s)
s
t
rc
w
= plate aspect parameter
=
=
=
=
plate length
plate width
plate thickness
plastic resistance in bending for plates with no axial
restraint
= non-dimensional displacement parameter
6
l/s = 100
Resistance [r/rc]
5
3
2
1
3
Provided that the stiffeners/girders remain stable against local
buckling, tripping or lateral torsional buckling stiffened plates/
girders may be treated as beams. Simple elastic-plastic methods of analysis are generally applicable. Special considerations
shall be given to the effect of:
2
1
0
0
0.5
1
1.5
Relative displacement
2
2.5
6.9.3 Tensile fracture of yield hinges
In lieu of more accurate calculations the procedure described
in Section 3.10.4 may be used for a beam with rectangular
cross-section (plate thickness x unit width) and length equal to
stiffener spacing.
6.10 Resistance curves and transformation factors
for beams
5
4
The effect of flexibility may be taken into account in an
approximate way by means of plate strip theory and the procedure described in Section 3.7.2. The relative reduction of the
plate’s plastic resistance, with respect to the values given in
Equation (6.8), is taken equal to the relative reduction of the
resistance for a beam with rectangular cross-section (plate
thickness x unit width) and length equal to stiffener spacing,
using the diagram for α = 2 (Figure 6-12). The elastic straining
of the plate is accounted for by the 2nd term in Equation (6.8).
In lieu of more accurate calculation, the effect of pull-in, given
by the first term in Equation (6.8) may be estimated by removing the plate and apply a uniformly distributed unit in-plane
force normal to the plate edges. The axial stiffness should be
taken as the inverse of the maximum in-plane displacement of
the long edge.
In lieu of more accurate calculation, it should be conservatively assumed that no membrane effects exist for a plate
located close to an unsupported boundary, i.e. the resistance
should be taken as constant and equal to the resistance in bending, r = rc over the allowable displacement range.
In lieu of more accurate calculations, it is suggested to assess
the relative reduction of the resistance for a uniformly loaded
plate located some distance from an unsupported boundary
with c = 1.0.
If membrane forces are taken into account it must be verified
that the adjacent structure is strong enough to anchor the fully
plastic membrane tension forces.
3
w
Figure 6-9
Plastic load-carrying capacities of plates as a function of lateral
displacement
6.9.2 Axial restraint
In Equation (6.8) the beneficial effect of membrane stiffening
is represented by the term containing the non-dimensional displacement parameter w . Great caution should be exercised
when assuming the presence of the membrane effect, because
the membrane forces must be anchored in the adjacent structure. For plates located in the middle of a continuous plate
field, the boundaries have often considerable restraint against
pull-in. If the plate is located close to the boundary, the edges
are often not sufficiently stiffened to prevent pull-in of edges.
Unlike stiffeners no simple method with a clear physical interpretation exists to quantify the effect of flexibility on the resistance of plates under uniform pressure. In the formulations used
in this RP the flexibility may be split into two contributions
—
—
—
—
—
—
Elastic flexibility of member/adjacent structure
Local deformation of cross-section
Local buckling
Strength of connections
Strength of adjacent structure
Fracture
6.10.1 Beams with no- or full axial restraint
Equivalent springs and transformation factors for load and
mass for various idealised elasto-plastic systems are shown in
Table 6-2. For more than two concentrated loads, equal in
magnitude and spacing, use values for uniform loading.
Shear deformation may have a significant impact on the elastic
flexibility and eigenperiod of beams and girders with a short
span/web height ratio (L/hw), notably for clamped ends. The
eigenperiod and stiffness in the linear domain including shear
deformation may be calculated as:
T = 2π
m
k
= 2π
Kl m,u Mu + Kl m,c Mc
k1'
2
⎛ πrg ⎞ ⎛ E A ⎞
⎟ ⎜1+
⎟ (6.9)
1+ ⎜⎜ cs
⎟
⎟ ⎜
⎝ L ⎠ ⎝ G Aw ⎠
and
1) Pull-in of edges
1
1
1
=
+
,
'
k
k
k1
1
Q
2) Elastic straining of the plate
where
DET NORSKE VERITAS
k Q = cQ
GA w
L
(6.10)
Recommended Practice DNV-RP-C204, October 2010
Page 30
cs
= 1.0 for both ends simply supported
= 1.25 for one end clamped and one end simply supported
= 1.5 for both ends clamped
L = length of beam/girder
E = elastic modulus
G = shear modulus
A = total cross-sectional area of beam/girder
Aw = shear area of beam/girder
kQ = shear stiffness for beam/girder
k1 = bending stiffness of beam/girder in the linear domain
according to Table 6-2
rg = radius of gyration
Mps = plastic bending capacity of beam at support
Mpm = plastic bending capacity of beam at midspan
and regardless of rotational boundary conditions the following
values may be used
cQ = 8 for uniformly distributed loads
= 4 for one concentrated loads
= 6 for two concentrated loads
The dynamic reactions according to Table 6-2 become increasingly inaccurate for loads with short duration and/or high magnitudes.
Table 6-2 Transformation factors for beams with various boundary and load conditions
Mass factor
Load-mass factor
Load case
Km
Klm
Load
Maximum
Resistance Factor ConcenUniConcen- Uniform resistance
domain
Kl
Rel
trated
form
trated
mass
mass
mass
mass
F
L/2
L/2
F/2
Load case
V
0.50
0.78
8Mp
384 EI
L
5 L3
Plastic
bending
0.50
0.33
0.66
8Mp
Plastic
membrane
0.50
0.33
0.66
Elastic
1.0
1.0
0.49
1.0
0.49
4Mp
48 EI
L
L3
Plastic
bending
1.0
1.0
0.33
1.0
0.33
4Mp
Plastic
membrane
1.0
1.0
0.33
1.0
0.33
4NP
L
Elastic
0.87
0.76
0.52
0.87
0.60
6Mp
56.4 EI
L
L3
Plastic
bending
1.0
1.0
0.56
1.0
0.56
6Mp
Plastic
membrane
1.0
1.0
0.56
1.0
0.56
Load-mass factor
Klm
Concen- Uniform
trated
mass
mass
0
L
0
6N P
L
Elastic
0.53
0.41
0.77
Elastoplastic
bending
0.64
0.50
0.78
8 M ps + M Pm
Plastic
bending
0.50
0.33
0.66
8 M ps + M Pm
Plastic
membrane
0.50
0.33
0.66
0.38 Rel + 012
. F
0.78 R − 0.28 F
0.75Rel − 0.25F
2 N P ymax
L
L
Resistance
domain
0.39 R + 011
. F
2 N P ymax
L
4NP
L
Mass factor
Km
Load
Factor Concen- Uniform
trated
Kl
mass
mass
DET NORSKE VERITAS
0
L
0.525R − 0.025F
0.52 Rel − 0.02 F
3 N P ymax
L
Maximum
resistance
Rel
EquivaLinear lent lin- Dynamic reaction
stiffness
ear
k1
stiffness
V
ke
12 M ps
384 EI
L
L3
F=pL
L
k1
0.64
F/2
L/3 L/3 L/3
Dynamic reaction
Elastic
F=pL
L
Linear
stiffness
(
)
L
(
L
)
384 EI
5 L3
0
4NP
L
0.36 R + 0.14 F
0.39 Rel + 011
. F
0.38 Rel + 012
. F
2 N p ymax
L
Recommended Practice DNV-RP-C204, October 2010
Page 31
Load case
Resistance
domain
F
L/2
L/2
F/2
F/2
L/3 L/3 L/3
F=pL
V1
V2
L
F
V1
V2
L/2
F/2
L/2
F/2
V1
V2
L/3 L/3 L/3
Mass factor
Km
Load
Factor Concen- Uniform
trated
Kl
mass
mass
Load-mass factor
Klm
Concen- Uniform
trated
mass
mass
Maximum
resistance
Rel
EquivaLinear lent lin- Dynamic reaction
stiffness
ear
k1
stiffness
V
ke
(
192 EI
)
Elastic
1.0
1.0
0.37
1.0
0.37
4 M ps + M Pm
Plastic
bending
1.0
1.0
0.33
1.0
0.33
4 M ps + M Pm
Plastic
membrane
1.0
1.0
0.33
1.0
0.33
Elastic
080
0.64
0.41
0.80
0.51
Elastoplastic
bending
0.87
0.76
0.52
0.87
0.60
6 ( M ps + M Pm )
L
56.4EI
L3
Plastic
bending
1.0
1.0
0.56
1.0
0.56
6 ( M ps + M Pm )
0
Plastic
membrane
1.0
1.0
0.56
1.0
0.56
Elastic
0.58
0.45
0.78
L
(
)
L
9 M ps
L
L
8 M ps
0.50
0.78
Plastic
bending
0.50
0.33
0.66
4 M ps + 2 M Pm
Plastic
membrane
0.50
0.33
Elastic
1.0
1.0
(
)
(
)
L
16 M Ps
3L
1.0
1.0
0.49
1.0
0.49
2 M ps + 2 M Pm
Plastic
bending
1.0
1.0
0.33
1.0
0.33
2 M ps + 2 M Pm
Plastic
membrane
1.0
1.0
0.33
1.0
0.33
Elastic
0.81
0.67
0.45
0.83
0.55
6 M Ps
L
(
(
(
V1 = 0.26 R + 0.12 F
V2 = 0.43R + 019
. F
⎛ 160 EI ⎞
⎟ ⋅ m2
⎜
3
⎝ L ⎠
4NP
L
2 N P ymax
L
107 EI
V1 = 0.25R + 0.07 F
)
0
V2 = 0.54 R + 014
. F
⎛ 160 EI ⎞
⎜
⎟ ⋅ m2
3
⎝ L ⎠
L3
L3
0.87
0.60
2 M ps + 3 M Pm
Plastic
bending
1.0
1.0
0.56
1.0
0.56
2 M ps + 3 M Pm
Plastic
membrane
1.0
1.0
0.56
1.0
0.56
)
56 EI
)
0
L
(
L
1.5M ps
M ps + M pm
L3
6N P
L
+ 0.25
1.5M ps
M ps + 2M pm
2M ps
M ps + 3M pm
+ 0.5
+ 0.5
0.39 R + 011
. F
± M Ps L
0.38 R + 012
. F
± M Ps L
0
0.78 R − 0.28 F
± M Ps L
0.75R − 0.25F
± M Ps L
2 N P ymax
L
V1 = 017
. R + 017
. F
V2 = 0.33R + 0.33F
132 EI
0.52
DET NORSKE VERITAS
0.52 Rel − 0.02 F
0.52 Rel − 0.02 F
4NP
L
0.76
m3 =
⎛ 212 EI ⎞
⎟ ⋅ m1
⎜
3
⎝ L ⎠
3
48 EI
L
0.87
m2 =
384 EI
)
L
Elastoplastic
bending
m1, m2 and m3 are factors for deriving the equivalent stiffness:
0.48R + 0.02 F
L3
Elastoplastic
bending
m1 =
260EI
L3
5L
L
0.66
= explosion load per unit length
= ps for stiffeners
= p l for girders
2 N P ymax
L
L
L
Where:
q
0.75Rel − 0.25F
4NP
L
3
0.64
0.43
⎛ 48EI ⎞
⎜ 3 ⎟ ⋅ m1
⎝ L ⎠
185EI
4 M ps + 2 M Pm
1.0
0
6N P
L
Elastoplastic
bending
0.43
0.71R − 0.21F
L3
⎛ 122 EI ⎞
⎜
⎟ ⋅ m3
3
⎝ L ⎠
0.525R − 0.025F
± M Ps L
0.52 Rel − 0.02 F
± M Ps L
3 N P ymax
L
Recommended Practice DNV-RP-C204, October 2010
Page 32
6.10.2 Beams with partial end restraint.
Relatively small axial displacements have a significant influence on the development of tensile forces in members undergoing large lateral deformations. Equivalent elastic, axial
stiffness may be defined as
l
1
1
=
+
k k node 2EA
α
⎞
⎟ =1
⎟
⎠
for 1 < α < 2
(6.12)
In lieu of more accurate analysis α = 1.2 can be assumed for
stiffened plates and H or I beams. For members with tubular
section α = 1.5. For rectangular sections and plates α = 2.0 can
be assumed.
R0 =
8c 1 f y Wp
l
plastic collapse resistance in bending for
= the member with uniform load.
w
c1 w c
wc =
(6.11)
knode = axial stiffness of the node with the considered member
removed. This may be determined by introducing unit loads in
member axis direction at the end nodes with the member
removed.
Plastic force-deformation relationship for a beam under uniform pressure may be obtained from Figure 6-10, Figure 6-11
or Figure 6-12 if the plastic interaction between axial force and
bending moment can be approximated by the following equation:
M ⎛⎜ N
+
M p ⎜⎝ N p
w=
c=
= non-dimensional deformation
αWp
A
4c1 kw c
f y Al
characteristic beam height for beams
= described by plastic interaction equation
(6.12).
2
c1 = 2
c1 = 1
WP
Wp = zgAg
A = As + st
Ae = As + set
zg
As
s
se
= non-dimensional spring stiffness
= for clamped beams
= for pinned beams
= plastic section modulus for the cross section of the beam
= plastic section modulus for stiffened
plate for set > As
= total area of stiffener and plate flange
= effective cross-sectional area of stiffener
and plate flange,
= distance from plate flange to stiffener
centre of gravity.
= stiffener area
= stiffener spacing
= effective width of plate flange see Section 6.10.4
= member length
l
6
5
α = 1.2
R/R 0
4
Bending & membrane
Membrane only
F
3
c=∞
2
0.2
0.5
0.1
k
0
0
0,5
1
1,5
k
w
1
1
0
(explosion load)
2
2,5
Deformation
3
3,5
w
Figure 6-10
Plastic load-deformation relationship for beam with axial flexibility (α = 1.2)
DET NORSKE VERITAS
4
Recommended Practice DNV-RP-C204, October 2010
Page 33
7
6
α = 1.5
R/R0
5
Bending & membrane
Membrane only
4
F
(explosion load)
3
c=∞
2
0.2
0.5
1
0.1
k
k
w
0
1
0
0
0,5
1
1,5
2
2,5
3
3,5
4
w
Deformation
Figure 6-11
Plastic load-deformation relationship for beam with axial flexibility (α = 1.5)
9
8
α=2
7
R/R0
6
Bending & membrane
Membrane only
5
0.1
0.2
4
F
(explosion load)
0.5
c=∞
3
k
1
k
w
2
0
1
0
0
0,5
1
1,5
2
Deformation
2,5
3
3,5
4
w
Figure 6-12
Plastic load-deformation relationship for beam with axial flexibility (α = 2)
For members where the plastic moment capacity of adjacent
members is smaller than the moment capacity of the exposed
member the force-deformation relationship may be interpolated from the curves for pinned ends and clamped ends:
R = ζR clamped + (1 − ζ)R pinned
(6.13)
where
0≤ζ=
R0
8
DET NORSKE VERITAS
actual
Mp
l
−1 ≤ 1
(6.14)
Recommended Practice DNV-RP-C204, October 2010
Page 34
R
= Collapse load in bending for beam accounting for
actual bending resistance of adjacent members
actual
0
R 0actual =
8M p + 4M p1 + 4M p2
l
M Pj = ∑ M Pj,i ≤ M P
The effective width for elastic deformations may be used when
the plate flange is on the tension side.
(6.16)
In most cases the flange will experience varying stress with
parts in compression and parts in tension. It may be unduly
conservative to use the effective width for the section with the
largest compression stress to be valid for the whole member
length. For continuous stiffeners it will be reasonable to use the
mean value between effective width at the section with the
largest compression stress and the full width. For simple supported stiffeners with compression in the plate it is judged to
be reasonable to use the effective width at midspan for the total
length of the stiffener.
i = adjacent member no i
j = end number {1,2}
MPj,i = Plastic bending moment for member no. i.
Elastic, rotational flexibility of the node is normally of moderate significance
6.10.3 Beams with partial end restraint - support capacity
smaller than plastic bending moment of member
For beams where the plastic moment capacity of adjacent
members is smaller than the moment capacity of the impacted
beam, the force-deformation relationship, R*, may be derived
from the resistance curve, R, for beams where the plastic
moment capacity of adjacent members is larger than the
moment capacity of the impacted beam (Section 3.7.2), using
the expression:
w
w lim
,
,
R* = R
w
≤ 1.0
w lim
w
w lim
(6.17)
≥ 1.0
R0 = Plastic bending resistance with clamped ends (c1 = 2)
– moment capacity of adjacent members larger than
the plastic bending moment of the beam
R *0 = Plastic bending resistance - moment capacity of adjacent members at one or both ends smaller than the plastic bending moment of the member
4M P + 2M P1 + 2M P2
l
M Pj = ∑ M Pj,i ≤ M P
(6.18)
(6.19)
i
i
j
MPj,i
wlim
=
=
=
=
adjacent member no i
end number {1,2}
Plastic bending resistance for member no. i.
limiting non-dimensional deformation where the
membrane force attains yield, i.e. the resistance
curve, R, with actual spring stiffness coefficient, c,
intersects with the curve for c = ∞. If c = ∞,
wlim =
π
2
6.10.5 Strength of adjacent structure
The adjacent structure must be checked to see whether it can
provide the support required by the assumed collapse mechanism for the member/sub-structure
6.10.6 Strength of connections
The capacity of connections can be taken from recognised
codes.
The connection shall be checked for the dynamic reaction
force given in Table 6-2.
For beams with axial restraint the connection should also be
checked for lateral - and axial reaction in the membrane phase:
where
R *0 =
Determination of effective flange due to buckling can be made
as for buckling of stiffened plates see DNV-RP-C201.
(6.15)
i
R * = R + (R 0 − R *0 )
Commentary.
— If the axial force in a tension member exceeds the axial
capacity of the connection the member should be assumed
disconnected.
— If the capacity of the connection is exceeded in compression and bending, this does not necessarily mean failure of
the member. The post-collapse strength of the connection
may be taken into account provided that such information
is available.
6.10.7 Ductility limits
Reference is made to Section 3.10.
The local buckling criterion in Section 3.10.2 and tensile fracture criterion given in Section 3.10.3 may be used with:
dc
c
= characteristic dimension equal to twice the distance
from the plastic neutral axis in bending to the extreme
fibre of the cross-section
= non-dimensional axial spring stiffness calculated in
Section 6.10.2.
y
max
Alternatively, the ductility ratios μ =
y el
be used.
in Table 6-3 may
Table 6-3 Ductility ratios μ - beams with no axial restraint
w
Boundary
conditions
for tubular beams and for stiffened plate
6.10.4 Effective flange
In order to analyse stiffened plate as a beam the effective width
of the plate between stiffeners need to be determined. The
effective width needs to be reduced due to buckling and/or
shear lag.
Shear lag effects may be neglected if the length is more than
2.5 times the width between stiffeners. For guidance see Ch.8,
Cantilevered Concentrated
Distributed
Pinned
Concentrated
Distributed
Fixed
Concentrated
Distributed
1)
Cross-section type 1)
Load
Type I
Type II
Type III
6
7
6
12
6
4
4
5
4
8
4
3
2
2
2
3
2
2
Crossecton types are defined in DNV-OS-C101, Table A3, Appendix A
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 35
/1/
/2/
NORSOK Standard N-003 Action and Action Effect
NS-ENV 1993-1 Eurocode 3: Design of Steel structures
Part 1-2. General rules - Structural fire design
/3/ Amdahl, J.: “Energy Absorption in Ship-Platform
Impacts”, UR-83-34, Dept. Marine Structures, Norwegian Institute of Technology, Trondheim, 1983.
/4/ SCI 1993: Interim Guidance Notes for the Design and
Protection of Topside Structures against Explosion and
Fire
/5/ Amdahl, J.: “Mechanics of Ship-Ship Collisions- Basic
Crushing Mechanics”. West Europene Graduate School
of Marine Technology, WEGEMT , Copenhagen, 1995
/6/ Skallerud, B. and Amdahl, j.: “Nonlinear Analysis of
Offshore Structures”, Research studies Press, UK 2002
/7/ Amdahl, J. and Johansen, A.: “High-Energy Ship Collision with Jacket Legs” ISOPE, Stavanger, 2001
/8/ Moan, T., Amdahl, J., Wang, X. and Spencer, J.: “ Risk
Assessment of FPSOs, with Emphasis on Collisions”,
SNAME Annual Meeting, Boston, 2002
/9/ Skallerud, B. and Amdahl, j.: “Nonlinear Analysis of
Offshore Structures”, Research studies Press, UK 2002
/10/ Amdahl, J. and Johansen, A.: “High-Energy Ship Collision with Jacket Legs” ISOPE, Stavanger, 2001
8. Commentary
Comm. 2.3 General
The structural design is seen as having acceptable safety
against accidental loads when the design accidental loads are
less than the design resistance. This is similar to the check of
the structure for ordinary loads but with the following differences: As ordinary loads are either permanent or occur frequent it will not be acceptable that the load lead to reduced load
carrying capacity while the short duration and the low probability of accidental loads make this an acceptable assumptions.
E.g. a blast wall need not be capable of resisting another explosion after a blast, but if the wall is used as a fire barrier it need
to serve as such after the blast.
Comm. 3.1 General
For typical installations, the contribution to energy dissipation
from elastic deformation of component/substructures in direct
contact with the ship is very small and can normally be
neglected. Consequently, plastic methods of analysis apply.
However, elastic elongation of the hit member as well as axial
flexibility of the nodes to which the member is connected, have
a significant impact on the development of membrane forces in
the member. This effect has to be taken into account in the
analysis, which is otherwise based on plastic methods. The diagrams in Section 3.7.2 are based on such an approach.
Depending on the structure size/configuration as well as the
location of impact elastic strain energy over the entire structure
may contribute significantly.
Comm. 3.2 Design principles
The transition from essentially strength behaviour to ductile
response can be very abrupt and sensitive to minor changes in
scantlings. E.g. integrated analyses of impact between the stern
of a supply vessel and a large diameter column have shown
that with moderate change of (ring - and longitudinal) stiffener
size and/or spacing, the energy dissipation may shift from predominantly platform based to predominantly vessel based.
Due attention should be paid to this sensitivity when the calculation procedure described in Section 3.5 is applied.
Comm. 3.3 Collision mechanics
The added mass is due to the hydrodynamic pressure induced
by the forced motion of water particles on the wet surface of
the ship. By solving the velocity potential for the fluid on the
body surface, the added mass is determined by means of 2-D
(strip theory) or 3-D techniques. The added mass is frequency
dependent, and thus varies with time during a collision, but a
constant value is recommended for simple analysis.
The fraction of collision energy to be dissipated as strain
energy for shuttle tanker impact on FPSO stern is shown in
Figure 8-1. Note the strong dependency of the mass ratio; the
larger the mass of shuttle tanker, the lesser of the collision
energy must be dissipated as strain energy. (However, provided that the speed of the shuttle tanker is constant, the absolute value of the strain energy increases)
The relative size may differ considerably for the approach
phase (shuttle tanker in ballast, FPSO fully loaded) and the
departure phase (shuttle tanker fully loaded, FPSO in ballast).
To illustrate this, possible values are listed in Table 8-1. In this
example both the FPSO and shuttle tanker are large compared
to typical North Sea conditions. The same added mass coefficient applies to both vessels. It is observed that the fraction of
energy to be dissipated as strain energy varies between 0.33
(departure) and 0.71 (approach). This indicates that the
approach phase may be particularly critical with respect to the
consequences of collision.
Table 8-1 Fraction of collision energy for strain energy
dissipation
Vessel size [dwt]
Approach phase Departure phase
Shuttle tanker
150.000
370.000
FPSO
320.000
160.000
Strain energy fraction
0.71
0.33
1,2
Strain energy fraction
7. References
1
0,8
0,6
0,4
0,2
0
0
1
2
3
4
Mass ratio [(ms + as)/(mi+ ai)]
Figure 8-1
Fraction of collision energy to be dissipated as strain energy for
shuttle tanker impact on an FPSO.
Comm. 3.5.1 Recommended force-deformation relationships
The force-deformation relationship for impacts from supply
vessels/merchant vessels against jacket legs have been elaborated because of the need to consider high-energy impacts (collision energy ~50 MJ) for some installations in the North Sea.
The likelihood of a central impact against a leg is obviously not
very large, but has still been considered because loss of a leg
could be critical for some platforms. Experience has shown,
however, that many large North Sea jackets have sufficient
strength to crush the bow. Reference is made to Amdahl and
Johansen (2001).
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 36
The curve for bow impact in Figure 3-4 has been derived on the
assumption of impacts against an infinitely rigid wall. Sometimes the curve has been used erroneously to assess the energy
dissipation in bow-brace impacts.
Experience from small-scale tests Ch.7, /3/ indicates that the
bow undergoes very little deformation until the brace becomes
strong enough to crush the bow. Hence, the brace absorbs most
of the energy. When the brace is strong enough to crush the
bow the situation is reversed; the brace remains virtually
undamaged.
On the basis of the tests results and simple plastic methods of
analysis, force-deformation curves for bows subjected to
(strong) brace impact were established in Ch.7, /3/ as a function of impact location and brace diameter. These curves are
reproduced in Figure 8-2. In order to fulfil a strength design
requirement the brace should at least resist the load level indicated by the broken line (recommended design curve). For
braces with a diameter to thickness ratio < 40 it should be sufficient to verify that the plastic collapse load in bending for the
brace is larger than the required level. For larger diameter to
thickness ratios local denting must probably be taken into
account.
Normally sized jacket braces are not strong enough to resist the
likely bow forces given in Figure 8-2, and therefore it has to be
assumed to absorb the entire strain energy. For the same reasons it has also to be assumed that the brace has to absorb all
energy for stern and beam impact with supply vessels.
Impact force [MN]
Recommended design curve for brace impact
12
Between a stringer (D= 1.0 m)
8
On a stringer (D= 0.75 m)
Between stringers (D= 0.75) m
4
0
0.5
1.0
1.5
2.0
Indentation [m]
Figure 8-2
Load-deformation curves for bow-bracing impact, Ch.7, /3/
Comm. 3.5.2 Force contact area for strength design of large
diameter columns.
Figure 8-3 shows an example of the evolution of contact force
intensity during a collision between the stern corner of a supply
vessel and a stiffened column. In the beginning the contact is
concentrated at the extreme end of the corner, but as the corner
deforms it undergoes inversion and the contact ceases in the
central part. The contact area is then, roughly speaking,
bounded by two concentric circles, but the distribution is uneven.
The force-deformation curves given in Figure 3-4 relate to
total collision force for stern end - and stern corner impact ,
respectively. Table 3-1 and Table 3-2 give the anticipated
maximum force intensities (local force and local contact areas,
i.e. subsets of the total force and total area) at various stages of
deformation.
The basis for the design curves is integrated, non-linear finite
element analysis of stern/column impacts.
The information given in 3.5.2 may be used to perform
strength design. If strength design is not achieved numerical
analyses have shown that the column is likely to undergo
severe deformations and absorb a major part of the strain
energy. In lieu of more accurate calculations (e.g. non-linear
FEM) it has to be assumed that the column absorbs all strain
energy.
Comm. 3.5.3 Energy dissipation is ship bow.
The requirements in this paragraph are based upon considerations of the relative resistance of a tubular brace to local denting and the bow to penetration of a tubular beam. A
fundamental requirement for penetration of the brace into the
bow is, first - the brace has sufficient resistance in bending,
second - the cross-section does not undergo substantial local
deformation. If the brace is subjected to local denting, i.e.
undergoes flattening, the contact area with the bow increases
and the bow inevitably gets increased resistance to indentation.
The provisions ensure that both requirements are complied
with.
Figure 8-8 indicates the level of the various contact locations.
Figure 8-4 shows the minimum thickness as a function of brace
diameter and resistance level in order to achieve sufficient
resistance to penetrate the ship bow without local denting. It
may seem strange that the required thickness becomes smaller
for increasing diameter, but the brace strength, globally as well
as locally, decreases with decreasing diameter.
Local denting in the bending phase can be disregarded provided that the following relationship holds true:
D
1⎛l⎞
≤ 0.14 2 ⎜ ⎟
t
c1 ⎝ D ⎠
2
(8.1)
Figure 8-5 shows brace thickness as a function of diameter and
length diameter ratio that results from Equation (8.1). The
thickness can generally be smaller than the values shown, and
still energy dissipation in the bow may be taken into account,
but if Equation (8.1) is complied with denting does not need to
be further considered.
Total collision force
distributed over this
Area with high force
intensity
Deformed stern corner
Figure 8-3
Distribution of contact force for stern corner/large diameter column impact
The requirements are based upon simulation with LS-DYNA
for penetration of a tube with diameter 1.0 m. Great caution
should therefore be exercised in extrapolation to diameters
substantially larger than 1.0 m, because the resistance of the
bow will increase. For brace diameters smaller than 1.0 m, the
requirement is conservative.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 37
Thickness [mm]
80
fy = 235 MPa, 6 MN
60
fy = 235 MPa, 3 MN
40
fy = 355 MPa, 6 MN
fy = 355 MPa, 3 MN
20
0
0,6
0,8
1
1,2
1,4
phase. Between these extremities, simple linear interpolation is
used.
Comm. 3.10.1 General
If the degradation of bending capacity of the beam cross-section after buckling is known the load-carrying capacity may be
interpolated from the curves with full bending capacity and no
bending capacity according to the expression:
fy = 420 MPa, 6 MN
R ( w ) = RM P =1 ( w )ξ + RM P =0 ( w )(1 − ξ )
fy = 420 MPa, 3 MN
RM P =1 ( w ) = Collapse load with full bending contribution
RM P =0 ( w ) = Collapse load with no bending contribution
Diameter [m]
Figure 8-4
Required thickness versus grade and resistance level of brace to
penetrate ship bow without local denting
Thickness [mm]
L/D =20
L/D =25
L/D =30
60
40
20
0,8
1
1,2
Diameter [m]
1,4
Figure 8-5
Brace thickness yielding little local deformation in the bending
phase
Comm. 3.7.3 Support capacity smaller than plastic bending
moment of the beam
The procedure is illustrated in Figure 8-6.
Elastic, rotational flexibility of the node is normally of moderate significance.
R M P , red
R M P =1 ( w = 0)
= Plastic collapse load in bending with reduced
cross-sectional capacities. This has to be
updated along with the degradation of crosssectional bending capacity.
80
0
Comm. 3.10.4 Tensile fracture in yield hinges
The rupture criterion is calculated using conventional beam
theory. A linear strain hardening model is adopted. For a cantilever beam subjected to a concentrated load at the end, the
strain distribution along the beam can be determined from the
bending moment variation. In Figure 8-7 the strain variation, ε = ε cr ε Y , is shown for a circular cross-section for a
given hardening parameter. The extreme importance of strain
hardening is evident; with no strain hardening the high strains
are very localised close to the support (x = 0), with strain hardening the plastic zone expands dramatically.
On the basis of the strain distribution the rotation in the plastic
zone and the corresponding lateral deformation can be determined.
If the beam response is affected by development of membrane
forces it is assumed that the membrane strain follows the same
relative distribution as the bending strain. By introducing the
kinematic relationships for beam elongation, the maximum
membrane strain can be calculated for a given displacement.
50
7
α = 1.5
6
45
c =0.5
40
5
Hardening parameter H = 0.005
35
Strain ε
R/R0 R*/R0
ξ=
R M P , red
100
0,6
(8.2)
4
R/R0
3
2
20
l
No hardening
10
R*/R0
0
0
25
P
x
15
R *0 / R0
1
Maximum strain
εcr/εY
= 50
= 40
= 20
30
1
2
wlim
5
3
4
0
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x/l
Deformation w
Figure 8-6
Derivation of force-deformation relationship for beam with end
moments less than beam plastic moment.
The procedure given is essentially the same as the one used in
NORSOK N-004, but is formulated differently. The bending
moment boundary condition is important in the bending phase,
but has no influence on the resistance in the pure membrane
Figure 8-7
Axial variation of maximum strain for a cantilever beam with circular cross-section
Adding the bending strain and the membrane strain allows
determination of the critical displacement as a function of the
total critical strain.
Figure 8-8 shows deformation at rupture for a fully clamped
beam as a function of the axial flexibility factor c.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 38
5
20%
4.5
4
NORSOK
15%
ABAQUS fine
2.5
2
1.5
l/D = 30
l/D = 20
c=
0
= 0.05
= 0.5
= 1000
c=
=
=
=
0
0.05
0.5
1000
USFOS beam
10%
ABAQUS
5%
USFOS shell
0%
1
0.0
0.5
0.5
1.0
1.5
2.0
Displacement [m]
0
0
20
40
60
80
100
120
Figure 8-11
Strain versus displacement of clamped beam
εcr/εy
Figure 8-8
Maximum deformation for a tubular fully clamped beam
(H=0.005)
The plastic stiffness factor H is determined from the stressstrain relationship for the material. The equivalent linear stiffness shall be determined such that the total area under the
stress-strain curve up to the critical strain is preserved (The two
portions of the shaded area shall be equal), refer Figure 8-9. It
is un-conservative and not allowable to use a reduced effective
yield stress and a plastic stiffness factor as illustrated in Figure
8-10.
fcr
HE
E
HE
1600
fcr
It is observed that the strain estimated in ABAQUS analysis
depend significantly on the mesh size evidencing the need for
a mesh-size-dependent fracture strain criterion. The NORSOK
criterion agrees fairly well with FEM calculations when a fine
mesh is used. The criterion is conservative, as desired. The
strain calculation in the USFOS beam element assumes a yield
plateau followed by parabolic type hardening. Only the fine
ABAQUS mesh captures the yield plateau effect.
Comm. 3.12 Energy dissipation in floating production vessels
1600
w/D
3
Strain
3.5
E
εcr
εcr
1600
Figure 8-12
Design of an impact resistant stern – collision with a VLCC.
Figure 8-9
Determination of plastic stiffness
f
HE
ε
Figure 8-10
Erroneous determination of plastic stiffness
The accuracy of the calculation model for tensile fracture in
yield hinges has been investigated by Amdahl and Skallerud
(2002). The maximum strain as a function of lateral displacement (Equation (3.22)) for a tubular beam is compared with the
maximum strain from finite element calculations in Figure
8-11. The beam is assumed to be clamped and fixed against
inward axial displacement, l = 25 m, D = 1 m, t = 0.06 m, fy =
300 MPa, H = 0.00287 (i.e. ultimate stress fu = 390 MPa for at
ultimate strain εu = 0.15). The mesh size for USFOS shell and
ABAQUS is 0.25 ⋅ 0.39 m and for ABAQUS fine mesh
0.05 ⋅ 0.195 m. The element used in ABAQUS analyses is the
S4R reduced integration element .
Calculation of energy dissipation in stringers, decks and bulkheads subjected to gross, axial crushing shall be based upon
recognised methods for plastic analysis, e.g. Ch.7, /3/ and
Ch.7, /4/. It shall be documented that the folding mechanisms
assumed yield a realistic representation of the true deformation
field.
The force deformation relationships given in Figure 3-6 may
be used to design a collision resistant stern of an FPSO. In
order to be impact resistant, stringers and frames must be fairly
closely spaced, typically in the range of 1.5 – 2 m. Given the
relative dimensions of the girder system and the bulb crosssection, as illustrated in Figure 8-12, it is reasonable to apply
the total collision force as uniformly distributed line loads on
the stringers and frames. The integrity of the stringers and
frames can then be checked in a FEM analysis. Moderate local
yielding should be accepted.
The stern structure must resist the collision force during all
stages of the collision process. Normally, it suffices to analyse
a few collision force and contact area situations.
It is normally neither practical nor necessary to design the plating and stiffeners such that their response is elastic. Large plastic deformations can be accepted, but fracture of the plating
should not occur (Note: provided that strength design is aimed
for). In lieu of more accurate calculations, the contact force
may be considered uniformly distributed over the plate field,
and the resistance may be assessed using the provisions given
for the resistance of plates and stiffeners to explosion loads.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 39
Even if the stiffeners are allowed to deform under extreme collision loads, they should be sufficiently robust to initiate crushing of the bulb. Engineering judgment must be applied, but it
is recommended to design the stiffeners according to requirements for ships navigating in ice; DNV Ice Class POLAR.
With respect to deformation resistance of stiffened plating, see
next paragraph.
The ductile resistance of stiffened plates may be analysed considering the side as an assembly of plate/stiffeners. The resistance of individual stiffeners with associated plate flange can be
calculated with the methods given in Section 6.3 using relationships for a concentrated force, see example in Ch.8,
Comm. 9.3. The resistance of the various stiffeners will be
mobilised according to the geometry (raking) of the impacting
bow.
Unless the frame spacing is long or the stiffener height is small,
fracture will take place before noticeable membrane stiffening
has taken place. The initiation of fracture does not necessarily
30
30
Energy s upers tr.
Energy bulb
25
imply that the resistance is totally lost, because fracture takes
place in the top flange while the strain on the plate side is considerably smaller .
The above procedure neglects the effect of membrane forces
transverse to the stiffeners. Depending on the geometry of the
panel this contribution may be substantial.
Collisions with FPSOs have been studied in-depth in a paper
by Moan et.al. (2002). Force-deformation relationships are
given for supply vessels/merchant vessels, 18.000 tons chemical tanker and a 42.000 tons tanker and a shuttle tanker. The
collision risk for all categories of vessels is discussed extensively. The consequences of a collision with a shuttle tanker
servicing the FPSO are especially considered.
Figure 8-13 shows the force-deformation relationship for supply vessel/merchant vessel colliding with the side of an FPSO.
It is interesting to see that the force level for bow without bulb
is smaller than the bow force-deformation curve given in Figure 3-4.
25
20
20
Forc e superstr.
Forc e bulb
15
15
10
10
5
5
0
0
0
1
2
Bow Displacement [m]
Force [MN]
Energy [MJ]
Total force
3
Figure 8-13
Force-deformation relationship for supply vessel/merchant vessel impact against FPSO side
Comm. 4.4.1 Stiffened plates subject to drill collar impact
The validity for the energy equation 4.6 is limited to
7 < 2 r/d < 41, t/d < 0.22 and mi/m < 0.75.
The formula neglect the local energy dissipation which can be
added as Eloc = R·0.2 t.
In case of hit near the plate edges the energy dissipation will be
low and may lead to unreasonable plate thickness. The failure
criterion used for the formula is locking of the plate. In many
cases locking may be acceptable as long as the falling object is
stopped. If the design is based on a hit in the central part of a
plate with use of the smaller diameter in the treaded part in the
calculations, no penetration of the drill collar will take place at
any other hit location due to the collar of such dropped objects.
Comm. 5.1 General
For redundant structures thermal expansion may cause buckling of members below 400°C. Forces due to thermal expansion are, however, purely internal and will be released once the
member buckles. The net effect of thermal expansion is therefore often to create lateral distortions in heated members. In
most cases these lateral distortions will have a moderate influence on the ultimate strength of the system.
As thermal expansion is the source of considerable inconvenience in conjunction with numerical analysis it would tempting
to replace its effect by equivalent, initial lateral member distortions. There is however, not sufficient information to support
such a procedure at present.
Comm. 5.5 Empirical correction factor
In Ch.7 /2/ Eurocode 3 an empirical reduction factor of 1.2 is
applied in order to obtain better fit between test results and column curve c for fire exposed compressive members. In the
design check this is performed by multiplying the design axial
load by 1.2. In non-linear analysis such a procedure is impractical. In non-linear space frame, stress resultants based analysis
the correction factor can be included by dividing the yield
compressive load and the Euler buckling load by a factor of
1.2. (The influence of axial force on member’s stiffness is
accounted for by the so-called Livesly’s stability multipliers,
which are functions of the Euler buckling load.) In this way the
reduction factor is applied consistently to both elastic and
elasto-plastic buckling.
The above correction factor comes in addition to the reduction
caused by yield stress and elastic modulus degradation at elevated temperature if the reduced slenderness is larger than 0.2.
Comm. 6.2 Classification of response
Equation (6.2) is derived using the principle of conservation of
momentum to determine the kinetic energy of the component
at the end of the explosion pulse. The entire kinetic energy is
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 40
then assumed dissipated as strain energy.
Equation (6.3) is based on the assumption that the explosion
pressure has remained at its peak value during the entire deformation and equates the external work with the total strain
energy. In general, the explosion pressure is not balanced by
resistance, giving rise to inertia forces. Eventually, these inertia forces will be dissipated as strain energy.
Equation (6.4) is based on the assumption that the pressure
increases slowly so that the static condition (pressure balanced
by resistance) applies during the entire deformation.
Comm. 6.4 SDOF system analogy
The displacement at the end of the initial, linear resistance
domain yel will generally not coincide with the displacement at
first yield. Typically, yel represents the displacement at the initiation of a plastic collapse mechanism. Hence, yel is larger
than the displacement at first yield for two reasons:
i)
Change from elastic to plastic stress distribution over
beam cross-section
ii) Bending moment redistribution over the beam (redundant
beams) as plastic hinges form
Impulsive asymptote
9
Pressure F/R
8
7
F Fmax
=
R R el
and a normalised impulse
1
Fmax t d
I
= 2
=
RT
R el T
k lm
6
5
Iso-damage curve for ymax/yelastic = 10
Elastic-perfectly plastic resistance
3
2
1
average
Pressure asymptote
0
1
2
3
4
5
6
7
=
k lm
elastic
+ (μ − 1)k lm
μ
plastic
(8.3)
μ = ymax/yel ductility ratio
Since μ is not known a priori iterative calculations may be necessary.
Dynamic response charts for a SDOF system with triangular
pressure pulses with rise time different from td/2 are given in
Figure 8-15 to Figure 8-17.
4
0
t
1
⋅ d
R el T
2
Fmax
By plotting corresponding values of normalised impulse and
normalised pressure the iso-damage curve given in Figure 8-14
is obtained.
If the displacement shape function changes as a non-linear
structure undergoes deformation the transformation factors
change. In lieu of accurate analysis an average value of the
combined load-mass transformation factor can be used:.
11
10
Figure 8-14 is derived from the dynamic response chart for a
SDOF system subjected to a triangular load with zero rise time
given in Figure 6-3.
In the example it is assumed that from ductility considerations
for the assumed mode of deformation a maximum displacement of ten times elastic limit is acceptable. Hence the line
y allow y max
=
= 10 represents the upper limit for the
y el
y el
displacement of the component. From the diagram it is seen
that several combinations of pulses characterised by Fmax and
td may produce this displacement limit. Each intersection with
a response curve (e.g. k3 = 0) yields a normalized pressure
8
9
10
11
Impulse I/(RT)
Figure 8-14
Iso-damage curve for ymax/yel = 10. Triangular pressure
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 41
Rel/Fmax=0.05
=0.1
= 0.3
100
= 0.5
= 0.6
= 0.7
Rel/Fmax= 0.8
= 0.9
10
= 1.0
ymax/yel
= 1.1
= 1.2
= 1.5
1
k3 = 0
k3 = 0.1k1
k3 = 0.2k 1
k3 = 0.5k 1
F
R
Fmax
Rel
k3 = 0.5k1 =0.2k1
=0.1k1
k1
td
yel
y
0.1
0.1
1
10
td/T
Figure 8-15
Dynamic response of a SDOF system to a triangular load (rise time=0)
Rel/Fmax=0.05
=0.1
= 0.3
100
= 0.5
= 0.6
= 0.7
Rel/Fmax= 0.8
10
ymax/yel
= 0.9
= 1.0
= 1.1
= 1.2
= 1.5
1
k3 = 0
k3 = 0.1k1
k3 = 0.2k1
k3 = 0.5k1
F
R
Fmax
Rel
k3 = 0.5k1 =0.2k1
=0.1k1
k1
0.15td
td
yel
y
0.1
0.1
1
td/T
Figure 8-16
Dynamic response of a SDOF system to a triangular load (rise time = 0.15td)
DET NORSKE VERITAS
10
Recommended Practice DNV-RP-C204, October 2010
Page 42
Rel/Fmax=0.05
100
=0.1
= 0.3
= 0.5
= 0.6
= 0.7
Rel/Fmax= 0.8
10
ymax/yel
= 0.9
= 1.0
= 1.1
= 1.2
= 1.5
1
k3 = 0
k 3 = 0.1k1
k 3 = 0.2k 1
k 3 = 0.5k 1
F
R
Fmax
Rel
k3 = 0.5k1 =0.2k1
=0.1k1
k1
0.30td
td
yel
y
0.1
0.1
1
10
td/T
Figure 8-17
Dynamic response of a SDOF system to a triangular load (rise time = 0.30td)
Comm.6.7.1.1 Component behaviour
For beams the characteristic linear stiffness given for the
elasto-plastic resistance domain in Table 6-2 is derived from
the equal area principle on the assumption that the support
moment is equal to the plastic bending moment of the beam.
Comm. 6.7.1.1 Component behaviour
For deformations in the elastic range the effective width (shear
lag effect) of the plate flange, se, of simply supported or
clamped stiffeners/girders may be taken from Figure 8-18.
Comm. 6.10.7 Ductility limits
The table is taken from Ch.7, Reference /4/. The values are
based upon a limiting strain, elasto-plastic material and crosssectional shape factor 1.12 for beams and 1.5 for plates. Strain
hardening and any membrane effect will increase the effective
ductility ratio. The values are likely to be conservative.
9. Examples
9.1 Design against ship collisions
9.1.1 Jacket subjected to supply vessel impact
The location of contact is at brace mid-span and the force acts
parallel to global x-axis. The brace dimensions are 762 x 28.6
mm. From linear elastic analysis it is found that the stiffness of
nodes 508 and 628 against displacement in the brace direction
is 736 MN/m and 51 MN/m respectively, when the brace is
removed. The unequal stiffness may be represented by two
equal springs, each with stiffness:
1.2
1
Uniform distribution or
n>
n=
n=
n=
s e/s
0.8
6
5
4
3
0.6
0.4
0.2
nFi
nFi
=L
= 0.6L
0
0
2
4
6
8
/s
Figure 8-18
Effective flange for stiffeners and girders in the elastic range
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 43
It must also be verified that the capacity of the joints is sufficient to support the force state in the brace both in the bending
mode of deformation and in the membrane tension state. Figure 9-3 displays the simulated bending moment-axial force
interaction history in the brace and shows that the membrane
force becomes substantial, but doe not attain the fully plastic
axial force. In lieu of accurate calculations, it should be assume
that the fully plastic tension is developed.
Provided that the joints and adjacent structure are capable of
supporting the brace ends, the energy dissipation is limited by
fracture due to excessive straining of the brace. Fracture criteria are given Section 3.10.3. Using the fracture criterion in Section 3.10.3 there is obtained wcrit = 2.2 m and a corresponding
energy dissipation E = 6 MJ.
10
Impact force [MN]
508
762 x 28.6 mm
l= 23.3 m
Figure 9-1
Jacket subjected to ship impact
1⎞
⎛ 1
K node = 2⎜
+ ⎟
736
51
⎝
⎠
10
Energy dissipation
8
8
6
6
USFOS
4
2
4
2
Simple model
Energy dissipation [MJ]
628
−1
= 95 MN / m
0
0
0.0
The axial stiffness of the brace is given by
0.5
1.0
1.5
2.0
2.5
3.0
Displacement [m]
2 EA 2 ⋅ 2.1 ⋅ 10 ⋅ π ⋅ 0.762 ⋅ 0.0286
=
= 1234 MN / m
l
23.3
5
Figure 9-2
Load versus lateral deformation of the contact point
and is large compared to the stiffness of the node. This yields
an effective stiffness of
Assuming clamped ends (c1 = 2) the non-dimensional spring
stiffness comes out to be
4c 1 Kw c
c=
f y Al
2
2 Kd
2 ⋅ 88 ⋅ 0 .762
=
=
≅ 0 .18
f y π t l 355 ⋅ π ⋅ 0 .0286 ⋅ 23 .3
The resulting end restraint is quite flexible. This is particularly
due to low stiffness in node 628, in spite of the support by the
adjacent braces. Hence, the build-up of tension force will be
delayed compared to a full axial fixity.
The collapse load in bending is calculated assuming clamped
conditions at both ends. This is a good approximation at the
lower end but slightly optimistic at the upper end.
R0 =
4c1M P 4 ⋅ 2 ⋅ 355 ⋅ (0.762 − 0.0286) 2 ⋅ 0.0286
=
= 1.9 MN
l
23.3
The load-deformation characteristics for the brace are obtained
by interpolation of the curves given in Figure 3-7. The result is
depicted in Figure 9-2. The response predicted by means of the
nonlinear analysis program USFOS is also plotted. It appears
that the simplified approach performs very well when axial
flexibility is taken into account. The loss of stiffness predicted
by USFOS at large displacements is due to initiation of failure
of adjacent members at node 628. Collapse of these members
takes place at a load level of 2.8 MN.
Normalised force N/NP
1.0
1
1
1
=
+
= 88 MN/m
K 95 1234
0.8
0.6
0.4
0.2
0.0
-0.2
0.0
0.2
0.4
0.6
0.8
Normalised moment M/MP
1.0
Figure 9-3
Axial force-bending moment interaction in brace
Tensile fracture in jacket brace
Tensile fracture of the brace considered in is estimated. The
characteristic dimension is, dc = D = 0.762 m. For steel grade
S 355 a strain hardening coefficient of H = 0.0034 is used, refer
Table 3-3. c1 = 2 (clamped ends are assumed), the collision
occurs at mid span, hence κ = 0.5, and κ l /dc = 15.3. The nondimensional spring stiffness is c = 0.18 and W/WP = π /4. This
yields wcrit = 2.2 m.
Because of the large κ l /dc – ratio, the brace is capable of
deforming almost three times its diameter.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 44
9.2 Design against explosions
9.2.1 Geometry
The geometry of the structure is outlined in Figure 9-4. The
plate, stiffeners and girders will be assessed. The main dimensions are:
t
s
l
= 10 mm
= 500 mm
= 2000 mm
Stiffener dimension Hp 180
Girder
t = 10
Stiffener Hp180
Figure 9-4
Geometry
9.2.2 Calculation of dynamic response of plate:
The dynamic response of the plate considered in Section 9.3.1
is studied. The plate is subjected to a triangular pressure pulse
with duration of 20 msecs. The peak pressure is fmax = 2.5
MPa. Assume that the resistance curve for c = 1.0 in Figure 97 applies. This yields rel/fmax = 0.3. The curve is redrawn
below along with approximate relationships
Resistance [Mpa]
P late c = 1.0
S tatic
3
9.2.3 Calculation of dynamic response of stiffened plate
The dynamic response of the stiffened plate considered in Section 9.3.2, subjected to a triangular explosion pulse with duration 20 msecs and peak pressure fmax = 2.5 MPa, is studied.
The collapse resistance is R0 = Rel = 0.58 MN, and no membrane stiffening can be assumed, i.e. k3 = 0. As the plate/stiffener undergoes a phase with elasto-plastic bending, the
resistance is approximated by a linear elastic-perfectly plastic
model, with equivalent stiffness of 208 MN/m and wel = 2.8
mm. The critical deformation at rupture wcrit = 36 mm, hence
the ductility ratio is μ = ymax/yel = 36/2.8 = 13.
The total mass is 108 kg. The load-mass factor is ~ 0.77 and
0.66 in the elastic/elasto-plastic and plastic bending phase,
respectively. Using Equation (8.3) the average load-mass facaverage
tor becomes klm
= ( 0.77 + (13 − 1) 0.66 ) /13 = 0.67 and the
eigenperiod is:
average
T = 2π
E q . linear
T ri-lin ear
2
f crit =
1
0
0
10
20
30
D eform ation [m m ]
k lm
k1
M
= 3.7m sec s
This gives td/T = 5.4. By inspection of Figure 6-3 it is found
that for μ = 13 and td/T =5.4 → Rel/Fmax ≅ 0.75 (in other
words, because of limited pulse duration it is possible to “overload” the stiffener by 33% compared to the static collapse
resistance in bending).
The maximum peak pressure the stiffener can resist is:
5
4
eigenperiod is adjusted by Tmod = T 1 0.65 = 5.0 msecs to
account for less stiffness. This yields td/Tmod = 4.0. From the
response chart there is obtained ymax/yel ~ 0.7. This yields
wmax = 0.7 · 47,3 = 33 mm.
All these methods yield approximately the same result. The
static approach is quite good, but there is a slight dynamic
amplification > 1 in the present case.
The plate must be checked with respect to rupture, see Section
9.4.1.
It is noticed that if no membrane force can be taken into
account, i.e. c = 0, then ymax/yel >> 100 and the plate will fail
completely.
40
50
Alternative 1- static analysis: The eigenperiod of the plate
according to Section 9.3.1 with η = 25 is T = 4.0 msecs. Hence
td/T = 5. This is a fairly long duration and static behaviour can
be assumed. The maximum deflection is determined directly
from Figure 9-7, i.e. wmax = 27 mm.
Alternative 2 - tri-linear resistance: By inspection of the
dynamic response charts and the resistance curve for the plate
it is noticed that none of the tri-linear curves apply very well.
The best fit is obtained with k3 = 0.5 k1, but this underestimates
the resistance for large deformations. From the response chart
for td/T = 5 there is read ymax/yel ~ 4.8. This yields wmax = 4.8
· 6.15 = 30 mm.
Alternative 3 – equivalent linear resistance: For large deformations the stiffness is fairly linear. Assume that the average
stiffness is linear and equal to 65 % of the elastic stiffness, i.e.
k = 0.65 · 123 = 80 MPa/m. In this case the rel can be set arbitrarily, but it should be ensured that the response is such that
ymax/yel < 1.0, and it is practical to select a given rel/fmax ratio
for which a response curve is provided. Hence assume rel/fmax
= 1.5, which gives rel = 47.3 mm and then it follows r. The
1 Rel
= 0.8 MPa.
0.75 sl
Consequently; the stiffener is not strong enough to resist the
explosion pressure without rupture (see discussion in Section
9.3.2 as concerns rupture of stiffener).
It is a fairly common experience that stiffeners are more likely
to be critical with respect to explosion loads than the plating
between stiffeners.
9.3 Resistance curves and transformation factors
9.3.1 Plates.
Generation of elastic–plastic resistance curve is illustrated for
a plate with the following particulars: Length, l = 2 m, width,
s = 0.5 m, thickness, t = 10 mm, yield stress f y = 355 MPa. It
is assumed that the plate is a part of a continuous plate field.
Large deformations are expected so that the plate will yield
along the boundaries. Then clamped boundaries are assumed.
The rigid – plastic curve is given by Equation (8.3). The collapse resistance in bending is rc = 0.76 MPa. The resistance
curve for fully fixed boundaries are indicated by the line “Plate
c = inf” in Figure 9-6. Below, the curve will be adjusted for the
effect of in-plane flexibility using the procedure described in
Section 6.8.2.
First, the resistance of a plate-strip is calculated, using information given in Section 6.9.2 with α = 2 (rectangular crosssection). Clamped boundaries with c1 = 2 are assumed also for
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 45
αWP
A
=
2 t 2 ⋅1 4 t
=
t ⋅1
2
The resistance curve for the plate strip is shown in Figure 9.6
for fully fixed boundaries c = ∞ , and for two values of the nondimensional spring stiffness, c = 1.0 and c = 0.3. It is observed
that the difference between the plate strip and the plate solution
is small for the present fairly large aspect ration, notably when
the membrane effect predominates
On the assumption that the plate experiences the same relative
reduction of the resistance due to axial flexibility as does the
plate strip, resistance curves for the plate with non-dimensional spring stiffness, c = 1.0, and c = 0.3 can be generated as
shown in Figure 9-6.
The next step is to assess the flexibility factor c:
If the flexibility of the adjacent structure is neglected, accounting only for the 2nd term in Equation (6.11), there is obtained
k=
2 EA 2 Et ⋅ 1
=
= 8400 MN / m
l
s
This yields a non-dimensional spring stiffness, c = 0.95.
Uniform stress field applied along
boundary of removed plate
Resistance [Mpa]
wc =
5
4
Plate c = inf
Plate c = 1.0
Plate c = 0.3
Strip c = inf
Strip c = 1.0
Strip c = 0.3
3
2
1
0
0
10
20
30
40
50
Deformation [mm]
Figure 9-6
Derivation of rigid-plastic resistance curves for a plate
5
Resistance [Mpa]
the plate strip. The collapse resistance in bending for the plate
strip is rc = 0.57 MPa.
The characteristic beam height is.
4
3
2
Plate c = inf
Plate c = 1.0
Plate c = 0.3
1
0
0
10
20
30
40
50
Deformation [mm]
Figure 9-7
Elastic-plastic resistance for a plate with various degrees of axial
flexibility.
Inward
displacement
9.3.2 Calculation of resistance curve for stiffened plate
Figure 9-5
Approximate determination of flexibility by means of membrane
analysis
In order to assess the influence of the flexibility of the adjacent
structure, a membrane analysis is performed with the plate
removed, see Figure 9-5. A constant stress of 100 MPa is
applied perpendicular the boundaries. The maximum deformation obtained, at the mid-point of the long edges, is 0.25 mm.
This yields an equivalent stiffness of knode = 100·0.010·1/
0.25·10-3 = 4000 MN/m. When both effects are accounted for,
the resulting stiffness becomes k = (1/8400 +1/4000)-1 =
2710 MN/m and c = 0.31. Hence, the plate resistance may be
assessed reasonably well by means of the curves for either c =
1.0 or c = 0.3.
Finally, the linear elastic solution up to the collapse resistance
in bending, rc, is added to the rigid-plastic solution. Using the
information given in Section 6.9.1, ψ = 400, and k1 = 123 MPa/
m. The deformation corresponding to r = rc is wel = 6.15 mm.
The resulting resistance curves are shown in Figure 9.7.
The plate considered in Section 9.3.1 is stiffened with HP 180x
8 stiffeners with yield stress fy = 355 MPa. The girder spacing
is 2.0 m. It is assumed that the stiffener is continuous, so that
yield hinges can form at the connections to the girder, hence c1
= 2. The area of the stiffener As= 1.88·10-2 m2 and the distance
to the centroid is zg = 0.109 m.
From Figure 8-18 it is found that the plate flange is approximately 80% for a uniformly distributed load when
l /s = 0.6⋅2.0/0.5 = 2.4. The effective area of the plate flange
is 0.8 s t = 4·10-3 m2 > As. Hence, it may be assumed that the
plastic neutral axis for the effective section lies at the stiffener
web toe. This yields the plastic section modulus WP = As zg =
2.05·10-3 m3 and collapse resistance in bending
R0 =
8c1 f yWP
l
= 0.58 MN
The characteristic beam height is.
αW
w c = -----------P- = α z g = 1.2 ⋅ 0.109 = 0.13 m
A
The moment of inertia for stiffener with effective plate flange
is I = 2.28 10-5 m4. The initial elastic stiffness is taken from
Table 6-2:
384EI
k=
= 230 MN/m
L3
This yields a lateral “elastic” deformation of wel = 2.5 mm for
R = R0.
The resistance curve for the stiffener with associated plate
flange is shown in Figure 9.8 for various degrees of axial flexibility (Note elastic part not included!).
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 46
For uniformly loaded, clamped beams there will be an elastoplastic bending phase between the occurrence of first plastic
hinge and final formation of final collapse mechanism. To
account for this effect, the initial stiffness may be modified on
the basis of equal area principle. The equivalent elastic stiffness is obtained from Table 6-2 with m1 = 1:
k=
307EI
= 184 MN/m
L3
and wel = 3.2 mm for R = R0.
It is noticed that the stiffener must undergo a substantial plastic
deformation before membrane strengthening becomes significant according to the present model. Whether this is achievable
depends on the ductility of the stiffener, refer Section 9.4.2.
Recent investigations indicate that the model adopted for stiffened plate is considerably conservative, which may warrant a
more accurate nonlinear finite element analysis if the stiffener
response becomes critical.
2.0
4
α = 1.2
c = 1.0
c = 0.5
c = 0.2
c = 0.1
1.0
0.5
0.0
0
0.1
0.2
0.3
5
0.56 ⋅ 2.9 ⋅ 10 + 0.975 ⋅ 1.8 ⋅ 10
T = 2p ----------------------------------------------------------------------------------- = 0.166s
6
274 ⋅ 10
c = inf
1.5
R [MN]
The plastic bending resistance is
8M Pm
Rel* =
= 5.95 MN
L
and wel* = 21.8 mm. However, the functional loads amount to
1.8 + 0.29 = 2.09 MN (including steel weight), so 21.8·2.09/
5.95 = 7.6 mm is already utilised and only Rel = 5.95-2.09 =
3.86 MN and wel = 14.1 mm is available in the equivalent elastic range. The limiting deformation for rupture calculated in
9.4.3 is wmax = 95 mm, yielding ductility ratio μ = w/max / wel
= 95/14.1 = 6.7.
When calculating the load-mass factor the change in transformation factor from the elastic to plastic regime may be
accounted for, see Ch.8, Comm. 6.4. The factor for distributed
mass and concentrated mass is
klmaverage,u = (0.55 + (6.7 − 1) ⋅ 0.56) / 6.7 = 0.56
and
average,c
klm
= (0.83 + (6.7 − 1) ⋅ 1.0) / 6.7 = 0.975,
respectively. The eigenperiod becomes
0.4
0.5
Deformation w [m]
Figure 9-8
Resistance curve for stiffener with associated plate flange.
9.3.3 Calculation of resistance curve for girder
What is the maximum pressure a steel girder can resist prior to
rupture, when the explosion load is triangular, with equal rise
and decay time, and the duration is 0.33 s?
The girder has the following dimensions:
Length L = 12 m, web height, hw = 1.5 m, web thickness, tw =
13 mm, top flange breadth, btop = 0.45 m, top flange thickness
ttop = 19 mm. The girder spacing is 2 m and the plate thickness
is 10 mm. For simplicity it is assumed that the plate flange is
fully effective. The girder has a distributed load of intensity 10
kN/m2 and mounted equipment with mass 1.8·105 kg. The
equipment load acts equally at two points located L/3 from
member ends. The girder is simply supported at one end and
clamped at the other end. At the clamped end fully plastic
bending moment of the girder can be assumed. There is no
axial restraint. Yield stress fy = 355 MPa, acceleration of gravity g = 10 m/s2, density of steel 7.86⋅103 kg/m3.
The following is obtained for the girder:
Moment of inertia I = 1.84⋅10-2 m4, elastic section modulus, W
= 1.96⋅10-2 m3, plastic section modulus, WP = 2.51⋅10-2 m3,
total cross-sectional area 0.048 m2. The total distributed mass,
including mass of girder is 0.29⋅10-5 kg, so the concentrated
mass predominates. Hence, transformation factors for two concentrated loads in Table 6.2 are used.
The equivalent stiffness in the elasto-plastic range (m3 = 1) is.
122EI
k=
= 274 MN/m
L3
and hence td/T= 0.33/0.166 ~ 2. From Figure 6-3 there is read
Rel/Fmax = 0.7 for coordinates (2,6.7). Hence, the girder can
resist a dynamic load of Fmax = 3.86/0.7 = 5.5 MN, corresponding to a peak pressure of fmax= 0.23 MPa.
Example girder:
The neutral axis for the girder studied in Section 9.3.3 is
located 0.315 m from the plate flange. This yields a characteristic dimension dc = 2 ⋅ (1.5 − 0.315) = 2.37 m. The critical
location is at the clamped side, whereby κ =1/3. Clamped end
yields c1 = 2 for the fracture check. With H = 0.0034 and c =
0, there is obtained w/dc = 0.069 and w = 0.095 m.
9.4 Ductility limits
9.4.1 Plating
Rupture of the plating for the example considered in Section
9.2.2 may be estimated by means of the procedure given in
Section 3.10.4, using the plate strip analogy. The characteristic
dimension is, dc = t = 10 mm. For steel grade S 355 a strain
hardening coefficient of H = 0.0034 is used, refer Table 3-4. κ
= 0.5, c1 = 2 (clamped ends) and κ l /dc = 0.5 s/t = 25. This
yields the following values for the critical deformation, wcrit,
depending on the spring stiffness c, see Table 9.1 (Note: the
elastic deformation rel = 6.15 mm is added to the values
obtained). By inspection of Figure 9-7 it is noticed that the
fully plastic membrane state according to this procedure is
attained in all cases but c = 0.
Table 9-1 Ductility limit as a function of the spring stiffness
c
∞
1.0
0.3
0
wcrit [mm]
35
51
59
76
9.4.2 Stiffener:
Rupture is calculated for the stiffened plate considered in section 9.2.3 using the procedure given in Section 3.10.4. The
steel grade is S 355 with a strain hardening coefficient of H =
0.0034, refer Table 3-3. Clamped conditions are assumed, i.e.
c1 = 2. The shape factor (somewhat arbitrarily) set to 1.5. The
characteristic dimension of the stiffened plate is dc = 2hw =
0.36 m. This yields λ/dc = 5.56, only. This critical deformation
becomes wcrit = 0.1dc = 36 mm, almost independent of the
spring stiffness c (Note: ductility ratio is μ = 36/2.2 = 16). This
fairly small value is due to the low κλ/dc – ratio for the stiffener. The stiffener is far from entering the membrane stiffening phase, so that any discussion of the possibility for
membrane forces to develop is irrelevant.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 47
If the stiffener is free against rotation and/or has a longer span
membrane effects may become important prior to rupture.
Observe that rupture is calculated for the location subjected to
the largest strains, i.e. at the stiffener top flange. Rupture in the
top flange is not necessarily critical with respect to intactness
to explosion loads, because the plate side experiences far less
strains. It is likely that the plate will remain intact beyond the
deformation limit corresponding to rupture in the top flange. A
significant part of the contribution to resistance from the stiffener is lost, but the plating between girders may have a significant residual resistance after failure of stiffeners provided that
the plate does not disintegrate. It is, however, difficult to provide validated, closed form solution for this situation.
A stiffener subjected to pressure on the plate side may trip
about the weld toe at mid span. In this case the assumptions
used in the strain calculation model are no longer valid.
9.4.3 Girder:
The neutral axis for the girder studied in Ch.8, Comm. 6.10 is
located 0.315 m from the plate flange. This yields a characteristic dimension dc = 2 ⋅ (1.5 − 0.315) = 2.37 m. The critical
location at the clamped side, whereby κ =1/3. Clamped end
yields c1 = 2 for the fracture check. With H = 0.0034 and c =
0, there is obtained w/dc = 0.069 and w = 0.095 m.
9.5 Design against explosions - girder
9.5.1 Geometry, material and loads
Plate thickness:
t = 14 mm
Stiffener dimension: HP240x10, simulated as an L-profile
with dimension L240x39x10x29
Stiffener spacing: s = 800 mm
l = 3200 mm
Stiffener length:
Girder dimension: T-girder with dimension: 870x300x10
x20
Girder length:
L = 12000 mm
The material properties are as follow:
Yield strength:
Strain rate factor:
Effective yield strength:
Modulus of elasticity:
Material density:
Poisson’s ratio:
Max. plastic strain:
fy = 420 MPa
γε = 1.0
fy = fy· γε = 420 MPa
E = 2.1·105 MPa
ρ = 7850 kg/m3
ν = 0.3
1.0% (maximum allowable, correspond to cross section class 3 or 4, see
sub-section 9.5.2)
Permanent loads and live loads are as follow:
Permanent loads:
Live loads:
Explosion pulse
period:
The geometry of the structure is outlined in Figure 9-4. The
main dimensions are:
pP = 10.0 kN/m2
pL = 5.0 kN/m2
td = 0.15 sec
(triangular load
with a rise time =
0.50·td)
Stiffener:
10
240
800 (typ.)
29
Bulkhead
39
Girder:
t = 14
12000
10
Stiffener: Hp240
870
Girder: TG870x300x10x20
Bulkhead
20
3200(typ.)
Figure 9-9
Geometry
DET NORSKE VERITAS
300
Recommended Practice DNV-RP-C204, October 2010
Page 48
9.5.2 Cross sectional of properties for the girder
Effective plate flange according to DNV Classification Note
30.1 (July 1995), sub-section 3.4.3 and 3.5.4:
s
t
β= ⋅
Cx =
1 .8
β
fy
E
−
=
0 .8
β
2
800
420
⋅
= 2.56
14
2.1E 5
=
1 .8
0.8
−
= 0.58
2.56 2.56 2
2
2
⎡
⎡
1 ⎞ ⎤
1 ⎞ ⎤
⎛ 3200 ⎞ ⎛
⎛l
⎞ ⎛
l e = s ⋅ ⎢C x + 0.1 ⋅ ⎜ − 1⎟ ⋅ ⎜⎜1 + 2 ⎟⎟ ⎥ = 800 ⋅ ⎢0.58 + 0.1 ⋅ ⎜
− 1⎟ ⋅ ⎜ 1 +
⎟
⎥ = 784.6 mm
2
⎝ 800
⎠ ⎝ 2.56 ⎠ ⎦⎥
⎝ s ⎠ ⎝ β ⎠ ⎥⎦
⎣⎢
⎣⎢
Determination of cross section class, Ref. NS3472:2001, Sec- tion 12.1:
Web:
Bottom Flange:
(h wg / t wg )
235 / f y
(
=
(850 / 10)
235 / 420
0.5 ⋅ (b fg − t wg )
t fg
235 / f y
Plate Flange:
(
0.5 ⋅ (l e − t wg )
t
235 / f y
)
= 113.6
, i.e. class 3 (bending considered)
0.5 ⋅ (300 − 10)
)
20
=
= 9 .7
235 / 420
, i.e. class 2 (bending & axial)
0.5 ⋅ (784.6 − 10)
)
14
=
= 37.0
235 / 420
, i.e. class 4 (bending & axial)
)
(
(
In the following calculations, a plate flange width larger than
cross sectional class 3 will not be considered, i.e.:
l e = 2 ⋅ (14 ⋅ t ⋅ 235 / f y ) + t wg = 2 ⋅ (14 ⋅14 ⋅ 235 / 420 ) + 10 = 303.2 mm
Gross sectional properties:
Effective area of plate flange:
Ap = le·t = 303.2·14 = 4245.1 mm2
Area of girder flange:
Af = bfg·tfg = 300·20 = 6000.0 mm2
Total area of girder web:
Aw = hwg·twg = 850·10 = 8500.0 mm2
Total area (gross section):
AG = Ap+Af+Aw = 4245.1+6000+8500 = 18745.1 mm2
Distance to neutral axis (from bottom of girder flange):
t fg
⎛ h wg
⎞
⎛t
⎞
Af ⋅
+ Aw ⋅ ⎜⎜
+ t fg ⎟⎟ + A p ⋅ ⎜ + h wg + t fg ⎟
2
2
2
⎝
⎠
⎝
⎠
z0 =
= 403.6mm
AG
Web height in tension:
ht = z0-tfg = 403.6-20.0 = 383.6mm
Web height in compression:
hc = hwg-ht = 850.0-383.6 = 466.4mm
le = 303.2
t = 14
hc
twg = 10
hwg = 870-20
= 850
z0
ht
tfg = 20
bfg = 300
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 49
Elastic moment of inertia (gross section):
⎛ t fg
⋅ ⎜⎜
⎝ 2
Effective girder web according to NS3472:
Elastic buckling stress
(
)
1
2
I G = ⋅ A f ⋅ t 2fg + Aw ⋅ h wg
+ Ap ⋅ t 2 + A f
12
f e = 23.9 ⋅
⎛ t wg
π2 ⋅E
⋅⎜
2
12 ⋅ (1 − ν ) ⎜⎝ hwg
2
⎞
⎛h
⎟ + Aw ⋅ ⎜ wg + t fg
⎟
⎜ 2
⎝
⎠
2
2
5
⎞
⎟ = 23.9 ⋅ π ⋅ 2.1 ⋅ 10
2
⎟
12 ⋅ 1 − 0.3
⎠
(
)
2
2
⎞
t
⎟ + A p ⋅ ⎛⎜ + h wg + t fg ⎞⎟ − AG ⋅ z 02 = 2.407 ⋅10 9 mm 4
⎟
⎝2
⎠
⎠
2
⎛ 10 ⎞
⋅⎜
⎟ = 627.9 MPa
⎝ 850 ⎠
Web slenderness:
λp =
fy
fe
=
420.0
= 0.818
627.9
Effective compression web height, see Figure 9-10:
⎧ hc
⎪
hce = ⎨ ⎡ hc
⎪⎢ λ
⎩ ⎣⎢ p
⎛
1
⋅ ⎜1 −
⎜ 5⋅λ
p
⎝
if
λ p ≤ 0.724
⎞⎤
⎟⎥ if
⎟⎥
⎠⎦
λ p > 0.724
⎡ 341.2 ⎛
1
⎞⎤
hce = ⎢
⋅ ⎜1 −
⎟ ⎥ = 430.8mm
⎣ 0.818 ⎝ 5 ⋅ 0.818 ⎠ ⎦
le = 303.2
t = 14
½ hce
hc
Δh
twg = 10
z0
hwg = 870-20
= 850
½ hce
e
ht
ht
tfg = 20
bfg = 300
Figure 9-10
Effective Girder Section
Effective girder cross section properties
Reduction in web height:
Δh = hc -hce = 466.4 – 430.8 = 35.6 mm
Effective cross section area:
Ae = AG -Δh ·twg = 18745.1 – 35.6·10.0 = 18389.1 mm2
Distance to neutral axis from bottom of girder flange:
⎞
⎛ Δh + hce
35.6 + 430.8
⎞
AG ⋅ z 0 − Δh ⋅ t wg ⎜
+ ht + t fg ⎟ 18745.1 ⋅ 403.6 − 35.6 ⋅10⎛⎜
+ 383.6 + 20 ⎟
2
2
⎠
⎝
⎠
⎝
z 0e =
=
= 399.1mm
Ae
18389.1
Effective elastic moment of inertia:
I Ge = I G −
h
1
⎛
⎞
⋅ Δh 3 ⋅ t wg − Δh ⋅ t wg ⋅ ⎜ t fg + ht + c − z 0 e ⎟
12
2
⎝
⎠
2
2
I Ge = 2.407 ⋅10 9 −
1
466.4
⎛
⎞
⋅ 35.6 3 ⋅10 − 35.6 ⋅10 ⋅ ⎜ 20 + 383.6 +
− 399.1⎟ = 2.387 ⋅10 9 mm 4
12
2
⎝
⎠
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 50
Effective elastic section modulus:
I Ge
2.387 ⋅10 9
W eo =
=
= 4.923 ⋅10 6 mm 3
t fg + h wg + t − z 0 e 20 + 850 + 14 − 399.1
W eu =
I Ge 2.387 ⋅10 9
=
= 5.982 ⋅10 6 mm 3
z 0e
399.1
W e = min(W eo , W eu ) = 4.923 ⋅10 6 mm 3
Plastic section modulus:
Web areas:
Aw1 =
Aw 2
hce
430.8
⋅ t wg =
⋅10 = 2154.0mm 2
2
2
e1
½ h ce
⎛h
⎞
⎛ 430.8
⎞
= ⎜ ce + ht ⎟ ⋅ t wg = ⎜
+ 383.6 ⎟ ⋅10 = 5990.0mm 2
2
2
⎝
⎠
⎝
⎠
Eccentricities (see figure):
e1 =
e3 =
A f + Aw1 + Aw 2 − A p
2 ⋅ t wg
A f − Aw1 + Aw 2 − A p
2 ⋅ t wg
⎧ hc 2
+ ht if
⎪
e2 = ⎨ 2
⎪ e3
if
⎩
6000 + 2154.0 + 5990.0 − 4245.1
=
= 494.9mm
2 ⋅10
=
½ h ce
e3
6000 − 2145.0 + 5990.0 − 4245.1
= 279.5mm
2 ⋅10
Aw2
ht
hc 2
+ ht
2
h
e3 ≤ c 2 + ht
2
e3 >
e 2 = 279.5mm
Plastic section modulus if Ap > Aw1 + Aw2 + Af :
hce
⎛
+ ht
⎜
⎞
hce
2
⎜
⎟ + Aw1 ⋅
W p1
A
h
+
⋅
−
w2
⎟
⎜ wg
4
2
⎠
⎜
⎝
Plastic section modulus if Ap + Aw1 > Aw2 + Af :
⎛ t fg
t
= A p ⋅ + A f ⋅ ⎜⎜
+ h wg
2
⎝ 2
⎞
⎟
⎟ = 8.719 ⋅10 6 mm 3
⎟
⎟
⎠
2
2
e
⎞
⎛t
W p 2 = A p ⋅ ⎜ + e1 ⎟ + A f ⋅ (t fg + h wg − e1 ) + 1 ⋅ t wg
2
2
⎠
⎝
⎛ hce
⎞
hce
⎛
⎞
− e1 ⎟
⎜
+ ht
⎜
⎟
⎝ 2
⎠
2
+
⋅ t wg + Aw 2 ⋅ ⎜ h wg −
− e1 ⎟ = 6.392 ⋅10 6 mm 3
⎜
⎟
2
2
⎜
⎟
⎝
⎠
Plastic section modulus if Ap + Aw1 < Aw2 + Af :
tf
⎛
⎞
h
⎛t h
⎞
W p 31 = A p ⋅ ⎜ + ce + Δh + e 2 ⎟ + A f ⋅ ⎜⎜ ht + ce + − e 2 ⎟⎟ = 4.259 ⋅10 6 mm 3
2
2
⎝2 2
⎠
⎝
⎠
2
2
⎛h
⎞ e
W p 32 = Aw1 ⋅ ⎜ ce + Δh + e 2 ⎟ + 2 ⋅ t wg
⎝ 4
⎠ 2
⎛ hce
⎞
+ ht − e 2 ⎟
⎜
2
⎝
⎠
+
⋅ t wg = 1.812 ⋅10 6 mm 3
2
W p 3 = W p1 + W p 2 = 6.070 ⋅10 6 mm 3
DET NORSKE VERITAS
Aw1
Recommended Practice DNV-RP-C204, October 2010
Page 51
Plastic section modulus:
⎧W p1 if A p > Aw1 + Aw 2 + A f
⎪
W p = ⎨W p 2 if A p + Aw1 > Aw 2 + A f = 6.070 ⋅10 6 mm 3
⎪W
⎩ p 3 if A p + Aw1 < Aw 2 + A f
Ratio between plastic and elastic section modulus:
Wp
= 1.23
We
9.5.3 Mass
Mass from plate:
w p = t ⋅ l ⋅ ρ = 14 ⋅ 3.200 ⋅ 7850 = 351.7
kg
m
Mass from stiffener, see figure:
tws = 10
As = hws ⋅ t ws + b fs ⋅ t fs = 211 ⋅ 10 + 39 ⋅ 29 = 3241mm 2
ws = As ⋅ ρ ⋅
3200
l 3241
kg
=
⋅ 7850 ⋅
= 101.8
800
s 10 6
m
tfs = 29
Mass from girder:
w g = AG ⋅ ρ =
kg
18745.1
⋅ 7850 = 147.1
6
m
10
bfs = 39
Mass from permanent loads and possible live loads (to be evalp
kg
10 ⋅ 10 3
w PL = P ⋅ l =
⋅ 3.200 = 3263.1
9.807
g
m
uated in each case):
Total mass:
w = w p + ⋅w s + w g + w PL = 351.7 + 101.8 + 147.1 + 3263.1 = 3863.7
kg
m
9.5.4 Natural period
Linear Stiffness, Ref. Table 6-2 in Section 6.10:
kl =
384 ⋅ E ⋅ I Ge
L3
=
384 ⋅ 2.1 ⋅10 5 ⋅ 2.387 ⋅10 9
N
N
= 1.114 ⋅10 5
= 1.114 ⋅10 8
3
mm
m
12000
Natural period assuming uniformly distributed mass (Klm,u is
taken from Table 6-2):
T = 2 ⋅π ⋅
K lm ,u ⋅ M u
kl
= 2 ⋅π ⋅
0.77 ⋅ w ⋅ L
0.77 ⋅ 3863.7 ⋅12.0
= 2 ⋅π ⋅
= 0.113 sec
kl
1.114 ⋅10 8
Ratio of pulse load period versus natural period:
td
0.15
=
= 1.33
T 0.113
DET NORSKE VERITAS
hws = 240-29
= 211
Recommended Practice DNV-RP-C204, October 2010
Page 52
9.5.5 Ductility ratio
The maximum lateral deformation prior to buckling can be calculated according to equation 3.19 in sub-section 3.10.2:
2
⎛
wp
14 ⋅ c f ⋅ f y ⎛ κL ⎞ ⎞⎟
1 ⎜
⎟
⎜
=
⋅ ⎜1 − 1 −
⋅
dc
2⋅c f ⎜
c1 ⋅ β 3 ⎜⎝ d c ⎟⎠ ⎟⎟
⎝
⎠
where;
dc is characteristic dimension for local buckling, i.e.
2·(t+½hce+dh+e3) = 2·(14+½·430.8+35.6+279.5)= 1089mm
c1 is 2 for clamped beams
κL is the smaller the distance from load to adjacent joint (0.5).
Here set to 0.5·L, i.e. 6000
2
2
⎛ c ⎞
⎛ 106624 ⎞
⎟ =⎜
⎟
c f = ⎜⎜
⎟
⎜ 1 + 106624 ⎟ = 0.994
⎝1+ c ⎠
⎝
⎠
,and c is non-dimensional spring stiffness, ref Section 3.7;
c=
k =
Web (bending):
β = 0.8
h wg / t wg
235 / f y
1
k node
1
+
2 ⋅ E ⋅ AG
=
we =
f y ⋅ W e ⋅ L2
32 ⋅ E ⋅ I Ge
=
Calculation of cross sectional slenderness factor, ref. Section
3.10, i.e. the maximum of the following:
Plate flange:
le / t
303.2 / 14
β =3
=3
= 86.9
235 / f y
235 / 420
Bottom flange:
β =3
b fg / t fg
235 / f y
=3
300 / 20
235 / 420
= 60.2
235 / 420
= 90.9
420 ⋅ 4.923 ⋅10 6 ⋅12000 2
= 18.56mm
32 ⋅ 2.1 ⋅10 5 ⋅ 2.387 ⋅10 9
p
M e = f y ⋅ We
=
1
= 7.873 ⋅10 9
1
1
+
1 ⋅10 20 2 ⋅ 2.1 ⋅10 5 ⋅18745.1
knode is axial stiffness of the node with the considered member
removed, here assumed infinitely.
1.2 ⋅ W p 1.2 ⋅ 6.070 ⋅10 6
=
= 396.1
wc =
18389.1
Ae
850 / 10
Based on these input parameters, the maximum plastic deformation is calculated to:
2
1089 ⎛⎜
14 ⋅ 0.994 ⋅ 420 ⎛ 6000 ⎞ ⎞⎟
wp =
⋅ 1− 1−
⋅
⎟ = 33.37 mm
⎜
2 ⋅ 0.994 ⎜
1089 ⎠ ⎟
2 ⋅ 90.9 3
⎝
⎝
⎠
The maximum elastic deformation is found from:
4 ⋅ c1 ⋅ k ⋅ wc2 4 ⋅ 2 ⋅ 7.873 ⋅10 9 ⋅ 406.12
=
= 106624
f y ⋅ Ae ⋅ l
420 ⋅18389.1 ⋅12000
1
= 0 .8
p ⋅ L2
12
L
Maximum elastic deformation:
we =
1 p ⋅ L4
⋅
384 E ⋅ I
we =
f y ⋅ We ⋅ L2
1 p ⋅ L2 12 ⋅ L2 1
L2
⋅
⋅
= ⋅Me ⋅
=
384 12
E⋅I
32
32 ⋅ E ⋅ I
E⋅I
Ductility ratio:
μ=
wp
we
=
33.37
= 1.80
18.56
9.5.6 Maximum blast pressure capacity
From Figure 9-11, the dynamic load factor is found:
DLF ( μ ) =
Rm
= 0.99
Fl
With reference to Figure 9-11, k3 was set to 0, which ensures
conservative results.
DET NORSKE VERITAS
Recommended Practice DNV-RP-C204, October 2010
Page 53
Rel/Fmax=0.05
100
= 0.3
=0.1
= 0.5
= 0.6
= 0.7
Rel/Fmax= 0.8
ymax/yel
10
= 0.9
μ = 1.80
1
k3 = 0
k3 = 0.1k1
k3 = 0.2k1
k3 = 0.5k1
F
R
Fmax
Rel
k3 = 0.5k1 =0.2k1
=0.1k1
= 1.0
= 1.1
= 1.2
= 1.5
k1
0.50td
td
yel
y
0.1
0.1
1
td/T
10
td/T = 1.33
Figure 9-11
Dynamic Response of a SDOF system due to a triangular pulse load profile (rise time = 0.50td)
Maximum resistance for a fixed supported beam, see Figure
9-12:
16 ⋅ M p 16 ⋅ W p ⋅ f y 16 ⋅ 6.070 ⋅10 6 ⋅ 420
Rm =
=
=
= 3399.2 ⋅10 3 N = 3399.2kN
L
L
12000
Elastic
Plastic
p
pP
L
L
M = pL2/12
MP = pPL2/16
M = pL2/24
MP = pPL2/16
Rm = pPL = 16MP/L
Figure 9-12
Moment diagram (elastic and fully plastic)
Resistance utilised in order to take the permanent and live load:
R 0 = w g ⋅ g ⋅ L + ( p p + p l )⋅ l ⋅ L = 147.1 ⋅ 9.807 ⋅12 + (10 + 5) ⋅10 3 ⋅ 3.2 ⋅12 = 593.3 ⋅10 3 N = 593.3kN
The maximum blast pressure capacity is obtained from the following two equations:
Fl =
Rm − R0
DLF ( μ )
and
Fl = pmax ⋅ l ⋅ L
The maximum blast pressure capacity is then:
pmax =
Rm − R0
1
(3399.2 − 593.3) ⋅ 103
1
⋅
=
⋅
= 0.074 MPa = 0.74bar
DLF ( μ ) l ⋅ L
0.99
3200 ⋅ 12000
Note that the maximum resistance (Rm) given above does not
include a capacity check with respect to shear. The shear
capacity can be determined from sub-section 12.4.4 in
NS3472-2001.
DET NORSKE VERITAS