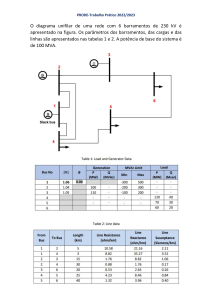
Engenharia Mecânica Cinética Planar de Corpos Rígidos Texto de apoio à disciplina MECÂNICA 2 Jorge Fonseca Justo Departamento de Mecânica 2ª Edição Índice 1. CINÉTICA PLANAR DE CORPOS RÍGIDOS: FORÇA E ACELERAÇÃO..............................1 1.1. INTRODUÇÃO ....................................................................................................................................1 1.2. MOMENTO DE INÉRCIA DE UMA MASSA .............................................................................................1 Como calcular o momento de inércia? ...........................................................................................1 Teorema dos eixos paralelos...........................................................................................................3 Raio de Giração ..............................................................................................................................4 Corpos Compostos ..........................................................................................................................5 Propriedades de Sólidos Homogéneos............................................................................................6 1.3. EQUAÇÕES CINÉTICAS PLANARES DO MOVIMENTO ........................................................................10 Equação do movimento de translação ..........................................................................................10 Equação do movimento de rotação...............................................................................................11 Aplicação Geral das Equações do Movimento .............................................................................15 1.4. EQUAÇÕES DO MOVIMENTO: TRANSLAÇÃO .....................................................................................17 Translação rectilínea ....................................................................................................................17 Translação curvilínea ...................................................................................................................17 1.5. EQUAÇÕES DO MOVIMENTO: ROTAÇÃO EM TORNO DE UM EIXO FIXO ..............................................18 1.6. EQUAÇÕES DO MOVIMENTO: MOVIMENTO PLANO GERAL ................................................................20 1.7. EXEMPLO ........................................................................................................................................22 Resolução......................................................................................................................................22 2. CINÉTICA PLANAR DE CORPOS RÍGIDOS: TRABALHO E ENERGIA .............................25 2.1. ENERGIA CINÉTICA..........................................................................................................................25 Translação ....................................................................................................................................27 Rotação em torno de um eixo fixo.................................................................................................27 Movimento plano geral .................................................................................................................28 2.2. TRABALHO DE UMA FORÇA .............................................................................................................28 Trabalho de uma força constante .................................................................................................29 Trabalho de um peso.....................................................................................................................29 Trabalho da força de uma mola elástica ......................................................................................30 Forças que não realizam trabalho ................................................................................................31 2.3. TRABALHO DE UM BINÁRIO .............................................................................................................31 2.4. PRINCÍPIO DO TRABALHO E ENERGIA ..............................................................................................33 2.5. CONSERVAÇÃO DA ENERGIA ...........................................................................................................33 2.6. ENERGIA POTENCIAL GRAVITACIONAL ...........................................................................................34 2.7. ENERGIA POTENCIAL ELÁSTICA ......................................................................................................34 Teorema da Conservação de Energia para um Corpo Rígido......................................................35 2.8. EXEMPLO ........................................................................................................................................36 Resolução......................................................................................................................................36 MECÂNICA 2 DEM-ISEP i Cinética Planar de Corpos Rígidos 1. CINÉTICA PLANAR DE CORPOS RÍGIDOS: FORÇA E ACELERAÇÃO 1.1. Introdução A cinética de corpos rígidos trata das relações entre as solicitações (forças e momentos) que actuam num corpo e o correspondente movimento (translação e rotação) desse corpo. As relações cinemáticas para o movimento plano de corpos rígidos foram anteriormente desenvolvidas, sendo agora necessárias neste estudo do movimento planar de corpos rígidos. Este estudo é aplicado a movimentos planares de corpos rígidos que, tal como as solicitações aplicadas, são considerados simétricos relativamente a um plano de referência fixo. Este plano de referência contém o centro de massa e todas as forças e momentos que actuam no corpo podem ser projectados para esse plano de referência. Um corpo que tenha dimensões apreciáveis na direcção normal ao plano de referência pode ser tratado como possuindo movimento plano. Estas idealizações incluem claramente um vasto número de movimentos de corpo rígido. 1.2. Momento de inércia de uma massa Uma vez que um corpo rígido tem uma forma e tamanho definidos, um sistema de forças aplicadas ao corpo poderá não ser concorrente, provocando momentos que irão resultar numa aceleração angular do corpo. Será mostrado que o movimento de rotação é descrito por uma equação do tipo M G I G . , referindo-se o símbolo I G a uma quantidade designada por momento de inércia. Por comparação, pode afirmar-se que o momento de inércia é uma medida da resistência do corpo à aceleração angular, da mesma forma que a massa é uma medida da resistência do corpo à aceleração, F m.a . Como calcular o momento de inércia? Para o corpo representado na Figura 1.1, o momento de inércia relativamente ao eixo z é definido como I r 2 .dm m (1.1) A distância r é medida na perpendicular a partir do eixo z até ao elemento de massa dm . MECÂNICA 2 DEM-ISEP 1 Cinética Planar de Corpos Rígidos Figura 1.1 No estudo da cinética planar, o eixo em torno do qual normalmente se calcula o momento de inércia passa no centro de massa G do corpo, sendo designado por I G . A unidade mais comum desta grandeza é kg.m2. Se o corpo for constituído por um material de massa volúmica variável, x, y, z , o elemento de massa elementar dm do corpo pode ser expresso em termos do seu volume e massa volúmica (1.2) dm dV Substituindo dm em (1.1), o momento de inércia do corpo pode ser calculado por integração usando elementos de volume, I r 2 .dV (1.3) V No caso de C te , este termo pode ser colocado fora do integral, sendo a integração função apenas da geometria do corpo, I r 2 .dV (1.4) V Quando o elemento de volume escolhido para integração tem dimensões infinitesimais nas três direcções, dV dx.dy.dz , o momento de inércia tem de ser determinado por integração tripla, Figura 1.2 a). Este processo de integração pode ser simplificado se o elemento de volume utilizado tiver dimensão ou espessura diferencial apenas numa direcção. Elementos de volume do tipo casca (Figura 1.2 b), ou do tipo disco (Figura 1.2 c) são usados com frequência para este fim. MECÂNICA 2 DEM-ISEP 2 Cinética Planar de Corpos Rígidos Figura 1.2 a) b) c) Teorema dos eixos paralelos Desde que o momento de inércia do corpo calculado relativamente a um eixo que passa no seu centro de massa seja conhecido, então o momento de inércia relativamente a relativamente a qualquer outro eixo paralelo pode ser determinado, usando o teorema de Steiner (ou dos eixos paralelos). Este teorema pode ser deduzido considerando o corpo representado na Figura 1.3. Figura 1.3 O eixo z ' passa através do centro de massa, enquanto o eixo paralelo z se encontra afastado a uma distância d . Escolhendo o elemento diferencial de massa dm , localizado no ponto x ', y ' , e usando o teorema de Pitágoras, r 2 d x ' y '2 2 MECÂNICA 2 DEM-ISEP (1.5) 3 Cinética Planar de Corpos Rígidos Podemos expressar o momento de inércia do corpo relativamente ao eixo z como I r 2 dm d x ' y '2 dm x '2 y '2 dm 2d x ' dm d 2 dm 2 m m m m (1.6) m Como r '2 x '2 y '2 , o 1º integral representa I G . O 2º integral é nulo, uma vez que o eixo z ' passa no centro de massa do corpo, i. e., x ' dm x ' dm 0 , uma vez que m x'0. m Finalmente, o 3º integral representa a massa total m do corpo. Assim, o momento de inércia relativamente ao eixo z pode ser escrito como I IG m d 2 (1.7) Sendo I G : momento de inércia relativamente a um eixo z´ que passa no centro de gravidade G. m : massa do corpo d : distância medida na perpendicular entre os dois eixos paralelos. Raio de Giração O momento de inércia relativamente a um determinado eixo é frequentemente referido em termos do raio de giração, k . Esta grandeza tem unidades de comprimento, e quando é conhecida juntamente com a massa, o momento de inércia do corpo é determinado a partir da equação I m k 2 ou k I m (1.8) Assim, k é uma medida da distribuição da massa de um corpo em torno do eixo em questão e a sua definição é análoga à definição de raio de giração para o momento de inércia de área. Se toda a massa m pudesse ser concentrada a uma distância k do eixo, o momento de inércia permaneceria inalterado. MECÂNICA 2 DEM-ISEP 4 Cinética Planar de Corpos Rígidos Corpos Compostos Tal como no caso dos momentos de inércia de área, o momento de inércia de massa de um corpo composto é a soma dos momentos de inércia individuais relativos ao mesmo eixo. Pode-se utilizar o teorema dos eixos paralelos para relacionar o momento de inércia de cada uma das partes no seu centro de massa, I G , com o do momento de inércia no centro de massa do corpo. É muitas vezes conveniente tratar um corpo composto como sendo definido por volumes positivos e volumes negativos. O momento de inércia de um elemento negativo, como o material que é removido para formar um furo, deve ser considerado como uma quantidade negativa. A tabela seguinte apresenta algumas das fórmulas mais úteis para os momentos de inércia de corpos com as formas mais comuns. MECÂNICA 2 DEM-ISEP 5 Cinética Planar de Corpos Rígidos Propriedades de Sólidos Homogéneos Corpo Centro de massa Momentos de inércia de massa 1 1 I xx m.r 2 m.l 2 2 12 Tubo cilíndrico 1 1 I x1 x1 m.r 2 m.l 2 2 3 - circular I zz m.r 2 1 1 I xx I yy m.r 2 m.l 2 2 12 Meio tubo cilíndrico x 2.r 1 1 I x1 x1 I y1 y1 m.r 2 m.l 2 2 3 I zz m.r 2 4 I zz 1 2 m.r 2 1 1 I xx m.r 2 m.l 2 4 12 1 1 I x1 x1 m.r 2 m.l 2 4 3 Cilindro circular 1 I zz m.r 2 2 1 1 I xx I yy m.r 2 m.l 2 4 12 Semicilindro x 4.r 3. 1 1 I x1 x1 I y1 y1 m.r 2 m.l 2 4 3 1 I zz m.r 2 2 1 16 I zz 2 m.r 2 2 9 MECÂNICA 2 DEM-ISEP 6 Cinética Planar de Corpos Rígidos Paralelepípedo rectangular I xx 1 m. a 2 l 2 12 I yy 1 m. b 2 l 2 12 I zz 1 m. a 2 b 2 12 I y1 y1 1 1 m.b 2 m.l 2 12 3 1 I y2 y2 m. b 2 l 2 3 Casca esférica 2 I zz m.r 2 3 Casca hemisférica 2 I xx I yy I zz m.r 2 3 5 I yy I zz m.r 2 12 x r 2 2 I zz m.r 2 5 Esfera Hemisfera 3.r x 8 I yy Barra delgada uniforme Barra quadrante circular MECÂNICA 2 DEM-ISEP 2 I xx I yy I zz m.r 2 5 83 I yy I zz m.r 2 320 1 m.l 2 12 1 I y1 y1 m.l 2 3 xy 2.r 1 I xx I yy m.r 2 2 I zz m.r 2 7 Cinética Planar de Corpos Rígidos 1 1 I xx m.a 2 m.l 2 4 12 1 1 I yy m.b 2 m.l 2 4 12 Cilindro de secção elíptica 1 I zz m. a 2 b 2 4 1 1 I y1 y1 m.b 2 m.l 2 4 3 1 1 I yy m.r 2 m.h 2 4 2 Casca cónica z 2.h 3 1 1 I y1 y1 m.r 2 m.h 2 4 6 1 I zz m.r 2 2 1 1 I yy m.r 2 m.h 2 4 18 1 1 I xx I yy m.r 2 m.h 2 4 2 x 4.r 3 z 2.h 3 Meia casca cónica 1 1 I x1 x1 I y1 y1 m.r 2 m.h 2 4 6 1 I zz m.r 2 2 1 16 I zz 2 m.r 2 2 9 3 3 I yy m.r 2 m.h 2 20 5 Cone circular recto MECÂNICA 2 DEM-ISEP z 3.h 4 I y1 y1 3 1 m.r 2 m.h 2 20 10 I zz 3 m.r 2 10 I yy 3 3 m.r 2 m.h 2 20 80 8 Cinética Planar de Corpos Rígidos I zz I yy x r 3 3 m.r 2 m.h 2 20 5 I x1 x1 I y1 y1 Semi-cone I zz 3.h z 4 3 1 m.r 2 m.h 2 20 10 3 m.r 2 10 1 3 I zz 2 m.r 2 10 1 I xx m. b 2 c 2 10 x Tetraedro y rectangular z Meio anel x cilíndrico MECÂNICA 2 DEM-ISEP a 4 b 4 c 4 a 4R 2 R 2 2 I yy 1 m. a 2 c 2 10 I zz 1 m. a 2 b 2 10 I xx 3 m. b 2 c 2 80 I yy 3 m. a 2 c 2 80 I zz 3 m. a 2 b 2 80 1 5 I xx I yy m.r 2 m.a 2 2 8 3 I zz m.r 2 m.a 2 4 9 Cinética Planar de Corpos Rígidos 1.3. Equações Cinéticas Planares do Movimento A análise que segue é limitada a movimentos planares de corpos rígidos que, tal como as solicitações aplicadas, são considerados simétricos relativamente a um plano de referência fixo. Neste caso a trajectória de cada partícula é uma curva plana paralela ao plano de referência. Uma vez que o movimento do corpo pode ser visto sob o plano de referência, todas as forças e momentos que actuam no corpo podem ser projectados para o plano de referência. Um exemplo do movimento dum corpo pode ser visto na Figura 1.4, em que o sistema inercial de referência x, y, z tem a sua origem coincidente com o ponto arbitrário P do corpo. Por definição de sistema inercial, estes eixos não rodam e, ou estão fixos, ou transladam com velocidade constante. Figura 1.4 Equação do movimento de translação As forças representadas na Figura 1.4 são forças externas, que representam o efeito de forças gravitacionais, eléctricas, magnéticas ou de contacto com corpos adjacentes. Uma vez que este sistema de forças foi já anteriormente estudado na análise de um sistema de partículas, a equação que daí resultou pode ser aqui usada: F m.a G MECÂNICA 2 DEM-ISEP (1.9) 10 Cinética Planar de Corpos Rígidos Esta equação é conhecida como equação do movimento de translação para um corpo rígido, estabelecendo que a Soma de todas as forças = externas a actuar no corpo massa do corpo x aceleração do seu centro de massa Para o movimento do corpo no plano x y , a equação do movimento (1.9) pode ser escrita sob a forma de duas equações escalares independentes F x m aG x (1.10) F Y m aG Y Equação do movimento de rotação Considere-se agora os efeitos causados pelos momentos do sistema de solicitações externas, calculados relativamente ao eixo perpendicular ao plano do movimento ( z ) que passa no ponto P . Tal como se mostra no diagrama de corpo livre da partícula de ordem i , Figura 1.5 a), Fi representa a força externa resultante que actua na partícula e fi é a resultante das forças internas causadas pela interacção com partículas adjacentes. Figura 1.5 a) b) Se a partícula tiver massa mi e no instante considerado tiver aceleração ai , então o diagrama cinético fica como na Figura 1.5 b). Se somarmos os momentos relativamente ao ponto P provocados pelas forças que actuam na partícula r Fi r f i r mi ai MECÂNICA 2 DEM-ISEP (1.11) 11 Cinética Planar de Corpos Rígidos ou M P i r mi ai (1.12) Figura 1.6 Os momentos relativamente a P podem ser expressos em termos de aceleração do ponto P , Figura 1.6. Se o corpo tiver uma aceleração angular e velocidade angular , então usando a relação ai aP r 2 r temos M P i mi r aP r 2 r mi r aP r r 2 r r (1.13) em que o ultimo termo, r r , é nulo. Exprimindo os vectores nas suas componentes cartesianas e desenvolvendo, obtém-se M kˆ m xiˆ yjˆ a P i i P x M kˆ m y a P M P i i i iˆ aP y ˆj xiˆ yjˆ kˆ xiˆ yjˆ P x x aP y x 2 y 2 kˆ mi y aP x x aP y x 2 y 2 (1.14) (1.15) (1.16) Fazendo tender mi dm e integrando ao longo de toda a massa m do corpo, obtém-se a seguinte equação de momentos MECÂNICA 2 DEM-ISEP 12 Cinética Planar de Corpos Rígidos M M P P y dm aP x x dm aP y r 2 dm m m m (1.17) representa apenas o momento provocado pelas forças externas que actuam no corpo, relativamente ao ponto P . O momento resultante provocado pelas forças internas é nulo, uma vez que em todo o corpo estas forças actuam aos pares (módulo igual mas de sentido contrário), acabando por os momentos respectivos se anularem. y dm , e o 2º termo, x dm , são usados para localizar a posição do centro O 1º termo, m m de massa G relativamente a P , uma vez que ym y dm e xm x dm , Figura 1.6. O último m integral, r 2 m dm , representa o momento de inércia calculado relativamente ao eixo z , i.e., m I P r 2 dm . Assim m M P ym aP x xm aP y I P (1.18) É possível reduzir esta equação a uma forma mais simples se o ponto P for coincidente com o centro de massa G do corpo. Se for este o caso, então y x 0 e portanto M G I G (1.19) A equação (1.19) pode também ser reescrita em termos das componentes x e y de aG e do momento de inércia I G . Se o ponto G está localizado no ponto x , y , Figura 1.6, então pelo teorema dos eixos paralelos, I P I G m x 2 y 2 . Substituindo em (1.18), obtém-se M P ym aP x y xm aP y x I G (1.20) A partir do diagrama cinético da Figura 1.6, aP pode ser expresso em função de aG como aG aP r 2 r MECÂNICA 2 DEM-ISEP (1.21) 13 Cinética Planar de Corpos Rígidos aG x iˆ aG y ˆj aP iˆ aP ˆj kˆ xiˆ yjˆ 2 xiˆ yjˆ x y (1.22) Desenvolvendo e separando nas componentes segundo x e y , obtém-se duas equações escalares aG x aP x y x 2 (1.23) aG y aP y x y 2 Rearranjando estas equações, obtém-se as expressões: aP x y aG x x 2 e aP y x aG y y 2 . Estas expressões substituídas em (1.20) permitem obter M P ym aG x xm aG y IG (1.24) Este resultado indica que quando se somam os momentos relativamente ao ponto P provocados pelas forças externas mostradas no Diagrama de Corpo Livre, Figura 1.7 a), estes são equivalentes à soma dos momentos cinéticos relativamente ao ponto P das componentes de maG mais o momento cinético de I G , Figura 1.7 b). Figura 1.7 a) b) De uma forma geral, pode-se então afirmar que M P MK MECÂNICA 2 DEM-ISEP (1.25) P 14 Cinética Planar de Corpos Rígidos Aplicação Geral das Equações do Movimento Para o movimento plano geral de um corpo simétrico rígido, podem-se escrever 3 equações escalares: F m aG x F m aG Y x Y M G I G . (1.26) M ou P M K P Para aplicação destas equações, deve-se sempre desenhar os diagramas de corpo livre e diagrama cinético, para o instante considerado. Diagrama de corpo Representar graficamente os termos envolvendo livre Diagrama cinético F , F x y e M G Representar graficamente os termos m aG x , m aG y , I G . Figura 1.8 Os dois diagramas são igualados, Figura 1.8, já que as forças e momentos no diagrama de corpo livre causam o movimento acelerado indicado pelos 3 vectores mostrados no diagrama cinético. MECÂNICA 2 DEM-ISEP 15 Cinética Planar de Corpos Rígidos Notas: - M G I G . aplica-se somente no ponto G. -Para outros pontos, devem-se considerar também os momentos “cinéticos” provocados pelas componentes de m aG em relação a esse ponto e por I G . . - I G . tem as mesmas propriedades de um binário e pode actuar em qualquer ponto no diagrama cinético. - m aG x e m aG Y são tratados da mesma maneira que uma força, i.e., podem ser actuar em qualquer ponto das suas linhas de acção. Figura 1.8 (rep.) Assim, para o caso representado na Figura 1.8 temos M A M A M k A , sendo: - Somatório dos momentos em relação ao ponto A. Assim, considerando positivo o sentido anti-horário, pode-se escrever: M A I G . m aG x .b m aG Y .c MECÂNICA 2 DEM-ISEP (1.27) 16 Cinética Planar de Corpos Rígidos 1.4. Equações do movimento: translação Translação rectilínea Quando um corpo está sujeito a um movimento de translação rectilínea, todos os pontos do corpo se deslocam segundo trajectórias paralelas em linha recta. Portanto as equações do movimento que se aplicam neste caso são: F m aG x F m aG Y x Y M G 0 (1.28) ou M P M K P Translação curvilínea Quando um corpo se desloca segundo um movimento de translação curvilínea, todos os pontos do corpo se deslocam segundo trajectórias curvas paralelas. Para análise é por vezes conveniente usar um sistema de eixos inercial cuja origem esteja coincidente com o centro de massa do corpo e eixos orientados segundo as direcções normal e tangencial, Figura 1.9. Figura 1.9 MECÂNICA 2 DEM-ISEP 17 Cinética Planar de Corpos Rígidos As equações do movimento que se aplicam neste caso são portanto: F n m aG n F ma t M (1.29) G t G 0 ou M B M K B com M B e m aG t h m aG n (1.30) 1.5. Equações do movimento: rotação em torno de um eixo fixo Considere-se um corpo rígido que se desloca no plano vertical, em torno de um eixo fixo que passa no ponto O , Figura 1.10, sujeito à acção de forças e momentos. Figura 1.10 Os diagramas de corpo livre e diagrama cinético deste corpo estão representados na Figura 1.11. MECÂNICA 2 DEM-ISEP 18 Cinética Planar de Corpos Rígidos Figura 1.11 As equações do movimento que se aplicam neste caso são: F n m aG n m 2 rG F m a t M G t G m rG IG ou (1.31) M O M K O com M O rG m aG t I G (1.32) Como aG t rG , substituindo em (1.32) , obtém-se M O I G m rG 2 (1.33) Pelo teorema dos eixos paralelos, I O I G m rG 2 , conclui-se que M O IO (1.34) Assim, as equações do movimento para o caso de rotação em torno de um eixo fixo que passe no ponto O podem-se também escrever da seguinte forma: MECÂNICA 2 DEM-ISEP 19 Cinética Planar de Corpos Rígidos F n m aG n m 2 rG F ma t M G t O m rG (1.35) IO 1.6. Equações do movimento: movimento plano geral Considere-se um corpo rígido que se desloca no plano vertical, em movimento plano geral, Figura 1.12, sujeito à acção de forças e momentos. Figura 1.12 Os diagramas de corpo livre e diagrama cinético deste corpo estão representados na Figura 1.13. Figura 1.13 MECÂNICA 2 DEM-ISEP 20 Cinética Planar de Corpos Rígidos As equações do movimento que se aplicam neste caso são então: F m aG x F m aG Y x Y M G I G . (1.36) ou M MECÂNICA 2 DEM-ISEP P M K P 21 Cinética Planar de Corpos Rígidos 1.7. Exemplo O disco de 12 kg tem velocidade angular de 20 rad/s. Se o freio ABC é aplicado de tal forma que a intensidade da força P varia com o tempo como se mostra na figura, determine o tempo necessário para o disco parar. O coeficiente de atrito cinético em B é µk=0.4. Figura 1.14 Resolução Representar o diagrama de corpo livre e diagrama cinético para cada um dos corpos. Diagrama de corpo livre do freio Diagrama cinético do freio P Fa NB Ax Ay Diagrama de corpo livre do disco Diagrama cinético do disco NB I G Fa Ox Oy Figura 1.15 MECÂNICA 2 DEM-ISEP 22 Cinética Planar de Corpos Rígidos Estabelecer as equações do movimento necessárias para cada corpo. Para o freio: M A M K A 0.5 N B 0.4 Fa P 0 (1.37) Para o disco: M G I G . 0.2 Fa I G . (1.38) sendo IG 1 2 1 2 mr 12 0.2 0.240 kg.m 2 2 2 (1.39) Uma vez que existe escorregamento em B, a força de atrito Fa é dada por Fa uk N B 0.4 N B NB Fa Fa uk 0.4 (1.40) Substituindo (1.40) em (1.37) e resolvendo em ordem a Fa , obtém-se Fa 0.4 Fa P 0 0.4 P P Fa 0.5 0.4 0.85 0.4 0.5 (1.41) Substituindo (1.41) em (1.38), obtém-se 0.2 Fa 0.2 P 0.9804 P IG . 0.85I G (1.42) Para determinar o tempo t que demora o disco a parar t 0 dt (1.43) 0 MECÂNICA 2 DEM-ISEP 23 Cinética Planar de Corpos Rígidos Assumindo, por hipótese, que t será superior a 5s 2 t 0 2 0 20 dt dt 2 t 0 2 0 20 0.9804 P dt 0.9804 P dt (1.44) Substituindo em (1.44) a expressão correspondente para P(t ) , obtém-se 2 t 0 20 0.9804 2.5t dt 0.9804 5 dt 0 2 0 20 0.9804 1.25t 2 0.9804 5t 2 2 t 0 0 20 0.9804 1.25 2 02 0.9804 5 t 2 2 t 5.08 s Uma vez que se obteve t > 2 s, a hipótese assumida está correcta. MECÂNICA 2 DEM-ISEP 24 Cinética Planar de Corpos Rígidos 2. CINÉTICA PLANAR DE CORPOS RÍGIDOS: TRABALHO E ENERGIA 2.1. Energia cinética Para que se possa aplicar o Método do Trabalho e Energia a problemas de cinética, é necessário desenvolver uma forma de calcular a energia cinética de um corpo quando este está sujeito a translação, rotação em torno de um eixo fixo ou movimento plano geral. Considere-se o corpo rígido mostrado na Figura 2.1, que se desloca num plano de referência x y . Figura 2.1 Uma partícula arbitrária de ordem i deste corpo, de massa dm , está localizada a uma distância r do ponto arbitrário P . Se para o instante representado a partícula tiver velocidade vi , então a energia cinética é dada por Ti 1 dm vi2 2 (2.1) A energia cinética do corpo é calculada escrevendo equações semelhantes para cada partícula do corpo e integrando os resultados, i.e., T 1 dm vi2 2 m MECÂNICA 2 DEM-ISEP (2.2) 25 Cinética Planar de Corpos Rígidos Esta equação pode também ser expressa em termos da velocidade do ponto P . Se o corpo tiver velocidade angular , então vi vP vi / P vP x iˆ vP y ˆj kˆ xiˆ yjˆ (2.3) vP x y iˆ vP y x ˆj Então 2 2 vi vi vi2 vP x y vP y x vP x 2 vP x y 2 y 2 vP y 2 vP y x 2 x 2 2 2 (2.4) vP2 2 vP x y 2 vP y x 2 r 2 Substituindo na equação da energia cinética obtém-se 1 1 T dm vP2 vP x y dm vP y x dm 2 r 2 dm 2m m m 2 m (2.5) Mas dm m m y dm y m : localização da coordenada y do centro de massa G relativamente a P m x dm x m : localização da coordenada x do centro de massa G relativamente a P m r dm I 2 P : Momento de inércia relativamente a um eixo z que passa em P m Pode-se portanto escrever T 1 1 m vP2 vP x y m vP y x m I P 2 2 2 MECÂNICA 2 DEM-ISEP (2.6) 26 Cinética Planar de Corpos Rígidos Como caso especial, se o ponto P coincidir com o centro de massa G do corpo, temos y x 0 , e portanto T 1 1 m vG2 I G 2 2 2 (2.7) Translação Se um corpo rígido de massa m estiver a descrever um movimento de translação rectilínea ou de translação curvilínea, a energia cinética devido à rotação é nula, pois 0 . Para este caso temos T 1 m vG2 2 (2.8) Rotação em torno de um eixo fixo Quando um corpo rígido roda em torno de um eixo rígido que passa num ponto O , Figura 2.2, o corpo tem energia cinética devida tanto à translação como à rotação: T 1 1 m vG2 I G 2 2 2 (2.9) Figura 2.2 O calculo da energia cinética pode também ser feito notando que vG rG , pelo que T 1 I G m rG2 2 . Pelo teorema dos eixos paralelos, I O I G m rG2 , pelo que 2 1 T 2 IO 2 MECÂNICA 2 DEM-ISEP (2.10) 27 Cinética Planar de Corpos Rígidos Movimento plano geral Quando um corpo rígido está sujeito a um movimento plano geral, Figura 2.3, o corpo tem velocidade angular e o seu centro de massa tem velocidade vG . Neste caso, a energia cinética é definida por: T 1 1 m vG2 I G 2 2 2 (2.11) Figura 2.3 2.2. Trabalho de uma força Figura 2.4 Se uma força F actua num corpo rígido, o trabalho realizado à medida que se desloca ao longo do caminho s , Figura 2.4, é definido por U F F .cos .ds (2.12) s Para um sistema de forças externas a actuar num corpo rígido, o trabalho total realizado é simplesmente a soma algébrica do trabalho de cada força. MECÂNICA 2 DEM-ISEP 28 Cinética Planar de Corpos Rígidos Trabalho de uma força constante Figura 2.5- Deslocamento do corpo de s1 para s2 Se uma força externa Fc actua num corpo rígido de forma constante em módulo e direcção, enquanto o corpo descreve um movimento de translação, Figura 2.5, a expressão (2.12) pode ser integrada de forma que a expressão do trabalho é dada por U FC Fc .cos s2 s1 (2.13) Trabalho de um peso Figura 2.6 W: peso do corpo y2 y1 : deslocamento vertical do centro de massa do corpo UW w ( y2 y1 ) MECÂNICA 2 DEM-ISEP (2.14) 29 Cinética Planar de Corpos Rígidos Trabalho da força de uma mola elástica Figura 2.7 1 1 U1 2 k .x2 2 k .x12 2 2 MECÂNICA 2 DEM-ISEP (2.15) 30 Cinética Planar de Corpos Rígidos Forças que não realizam trabalho -Forças que actuam em pontos fixos do corpo -Forças que actuam numa direcção perpendicular às suas trajectórias de deslocamento. Exemplo de forças que não realizam trabalho (Figura 2.8): -Peso W -Reacção N -Força de atrito Fr, pois actua num ponto de velocidade nula. Figura 2.8-Caso de rolamento sem escorregamento. 2.3. Trabalho de um binário Considere-se o corpo da Figura 2.9, sujeito a um binário de módulo M F .r . Figura 2.9 MECÂNICA 2 DEM-ISEP 31 Cinética Planar de Corpos Rígidos Um deslocamento diferencial = translação + rotação Figura 2.10 Quando o corpo está em translação, o trabalho de uma anula o trabalho da outra. Quando o corpo tem uma rotação diferencial d , o trabalho realizado é dU M F ds F ds r r F d F d 2 2 (2.16) F r d M d Quando o corpo gira, no plano, de um ângulo finito, de 1 para 2 , o trabalho do binário é dado por 2 U M M d (2.17) U M M 2 1 (2.18) 1 Se o binário for constante: MECÂNICA 2 DEM-ISEP 32 Cinética Planar de Corpos Rígidos 2.4. Princípio do Trabalho e Energia Aplicando o Princípio do Trabalho e Energia desenvolvido anteriormente, a cada uma das partículas do corpo rígido e somando algebricamente, obtém-se o Princípio do Trabalho e Energia para um Corpo Rígido: T1 U1 2 T2 com (2.19) T1 = Energia cinética inicial de translação e rotação T2 = Energia cinética final de translação e rotação U 1 2 = Soma dos trabalhos realizados por todas as forças externas e binários 2.5. Conservação da Energia Quando um sistema de forças que actua num corpo rígido é constituído apenas por forças conservativas, pode também ser usado o Teorema da Conservação de Energia para resolver problemas que doutra forma seriam resolvidos por aplicação do Princípio do Trabalho e Energia. Este teorema é frequentemente mais fácil de aplicar, já que o trabalho de uma força conservativa é independente da trajectória e depende só da posição inicial e final do corpo. MECÂNICA 2 DEM-ISEP 33 Cinética Planar de Corpos Rígidos 2.6. Energia Potencial Gravitacional Figura 2.11 Vg W . yG (2.20) sendo yG : altura do centro de massa do corpo 2.7. Energia Potencial Elástica Figura 2.12 Ve 1 2 k .x 2 MECÂNICA 2 DEM-ISEP (2.21) 34 Cinética Planar de Corpos Rígidos Teorema da Conservação de Energia para um Corpo Rígido Aplicando-se o Teorema da Conservação de Energia, desenvolvido para a partícula, a cada uma das partículas do corpo rígido e somando algebricamente os resultados, obtém-se o Teorema da Conservação de Energia para um Corpo Rígido, escrito da seguinte forma: T1 V1 T2 V2 com (2.22) T1 = Energia cinética no instante 1 T2 = Energia cinética no instante 2 V1 = Energia Potencial no instante 1 V2 = Energia Potencial no instante 2 MECÂNICA 2 DEM-ISEP 35 Cinética Planar de Corpos Rígidos 2.8. Exemplo A barra de 5 kg mostrada tem centro de massa em G. Se a barra tiver uma velocidade angular inicial 1 10 rad/s no sentido horário quando 90º , qual a constante k da mola de forma que a barra pare quando atingir a posição horizontal 0º . Sabendo que a mola se deforma 0.1 m quando 0º , quais são as componentes horizontal e vertical da reacção no pino A quando 0º ? Figura 2.13 Resolução Desenhando o diagrama de corpo livre da barra, após o contacto com a mola, constata-se que as únicas forças que produzem trabalho são o peso da barra (mg) e a força feita pela mola (Fm). A reacção em A não produz trabalho pois actua num ponto que não tem deslocamento. Diagrama de corpo livre mg Ax G Fm Ay l Figura 2.14 MECÂNICA 2 DEM-ISEP 36 Cinética Planar de Corpos Rígidos Aplicando o Princípio do Trabalho e Energia à barra, considerando o instante inicial quando 90º e o instante final quando 0º , fica T1 U1 2 T2 (2.23) Com T1 1 1 1 I A12 ml 2 102 30 J 2 2 3 (2.24) ou 1 T1 m vG1 2 2 2 1 1 l 11 I G12 m 1 ml 2 12 2 2 2 2 12 2 (2.25) 1 0.6 1 1 2 2 5 10 5 0.6 10 30 J 2 2 2 12 O trabalho feito pelas forças que actuam na barra (peso e força da mola) é dado por U 1 2 Fm U1mg 2 U1 2 1 l 1 k x12 k x2 2 2 2 2 2 1 5 9.81 0.3 0 k 0.1 2 14.72 0.005k mg (2.26) A energia cinética final é nula, uma vez que a barra se imobiliza para 0º , T2 0 (2.27) Substituindo em (2.23) e resolvendo obtém-se k 8.94 kN/m MECÂNICA 2 DEM-ISEP (2.28) 37 Cinética Planar de Corpos Rígidos Determinação das componentes horizontal e vertical da reacção no pino A quando 0º : Representar o diagrama de corpo livre e diagrama cinético para a barra, para 0º Diagrama de corpo livre Diagrama cinético m aGy mg IG m aGx Ax G G Fm Ay l Figura 2.15 Estabelecer as equações do movimento para a barra. Na direcção horizontal: F x m aG x Ax m aG x (2.29) Ax 0 (2.30) Como aG x an 2 l 0 2 Na direcção vertical: F y m aG y Ay mg Fm m aG y Ay 5 9.81 8940 0.1 5 aG y (2.31) A equação do movimento de rotação fica M A M K P l l P Fm l I G . m aG y 2 2 (2.32) sendo aG y l 2 e IG m MECÂNICA 2 DEM-ISEP l2 12 (2.33) 38 Cinética Planar de Corpos Rígidos Resolvendo o seguinte sistema de equações Ay 5 0.3 5 9.81 8940 0.1 0.62 5 . 5 0.3 0.3 5 9.81 0.3 894 0.6 12 (2.34) (2.35) obtém-se 869 rad/s2 Ay 459.4 N MECÂNICA 2 DEM-ISEP 39