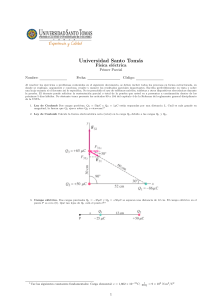
Laboratorio No. 2 Modelamiento de sistemas fı́sicos Didier F. Villaquiran Samboni Brandon Javier Rosero Juan Pablo Ruano Ingenierı́a electrónica Universidad de Nariño San Juan de Pasto, Colombia didier.v@udenar.edu.co Ingenierı́a electrónica Universidad de Nariño San Juan de Pasto, Colombia brand78j@gmail.com Ingenierı́a electrónica Universidad de Nariño San Juan de Pasto, Colombia wanjuanito@hotmail.com Resumen—El presente documento muestra el modelamiento matemático de sistemas dinámicos por medio de ecuaciones diferenciales, en donde se pretende llevar dichos sistemas a una analogia con un circuito eléctrico y entender mejor el funcionamiento de los elementos eléctricos como el capacitor, el inductor y el resistor. Se realizará el análisis y modelamiento de 5 diferentes sistemas dinámicos con sus respectivas ecuaciones diferenciales y analogias, además se comparan las relaciones de cada elemento de cada sistema con su análogo. siguientes cambios de variables: x3 = x03 + y2 ⇒ y2 = x3 − x03 x1 = x01 + y1 ⇒ y1 = x1 − x01 (1) Donde x01 y x03 son las posiciones iniciales de la masa m1 y m2 respectivamente en referencia a la pared vertical, por lo tanto x01 y x03 son constantes, las nuevas referencias se ilustran en la siguiente gráfica. Index Terms—Sistema, análogo, Circuito, Elementos, Ecuaciones diferenciales. I. I NTRODUCCI ÓN Dentro del hámbito industrial es fundamental entender el funcionamiento de algunos montajes mecánicos, hidráulicos o térmicos ya que la aplicación de la ingenierı́a electrónica en este aspecto requiere de un modelo que describa matemáticamente al sistema planteado, por lo tanto se requiere los fundamentos fı́sicos para realizar una descripción matemática correcta del sistema, si embargo, realizando una analogı́a con las variables eléctricas se puede realizar la implementacion del modelo en un circuito eléctrico lo cual evita el gasto innecesario de recursos y permite verificar el funcionamiento del modelo antes de realizar la implementación fı́sica. II. II-A. Figura 2. Sistema mecánico I con referencias auxiliares y1 y y2 . Los diagramas de fuerzas quedan de la siguiente manera: TALLER DE APLICACI ÓN Sistema Fı́sico 1 El primer sistema se representa en la siguiente figura: Figura 3. Diagrama de fuerzas para el sistema mecánico I considerando las referencias auciliares. a): diagrama de fuerzas para la masa m1 y b): diagrama de fuerzas para la masa m2 Figura 1. Sistema mecánico I Para realizar el modelo mecánico se consideran las referencias auxiliares y1 y y2 que e ubican el el centro de masa de m1 y m2 respectivamente , por lo tanto se tienen los De la Fig.(3) se obtiene el modelo matemático, para la masa m1 se tiene: u = m1 dy1 dy2 d2 y1 + K(y1 − y2 ) + c( − ) 2 dt dt dt Similarmente pata la masa m2 : (2) d 2 y2 dy2 dy1 0 = m2 2 + K(y2 − y1) + c( − ) (3) dt dt dt Aplicando el cambio de variable de la Ec.(1) en las ecuaciones Ec.(2) y Ec.(3) se obtiene que: II-B. Dos tanques en cascada El Segundo sistema se representa en la siguiente figura: d2 (x1 − x01 ) + K(x1 − x01 − x3 + x03 )+ dt2 d(x1 − x01 ) d(x3 − x03 ) c( − ) (4) dt dt Pero como x01 y x03 son constantes, la Ec.(4) se simplifica de la siguiente manera: u = m1 d2 x1 dx1 dx3 + K(x1 − x01 − x3 + x03 ) + c( − ) (5) dt2 dt dt Para la masa m2 se obtiene: u = m1 d2 x3 dx3 dx1 + K(x3 − x03 − x1 + x01 ) + c( − ) (6) dt2 dt dt En este caso se modela un sistema eléctrico en serie por lo tanto , las ecuaciones que modelan el circuito se obtienen a partir de las ecuaciones Ec.(5) y Ec.(6): 0 = m2 Vu = L1 1 di1 (t) +R[i1 (t)−i3 (t)]+ dt C 1 di3 (t) +R[i3 (t)−i1 (t)]+ 0 = L2 dt C Figura 5. Sistema fı́sico de 2 tanques en cascada. Y su sistema de ecuaciones se representa como: Z i1 (t)−i01 +i3 (t)+i03 dt Z A2 i3 (t)−i03 −i1 (t)+i01 dt (8) Con las ecuaciones diferenciales obtenidas se puede hacer una analogia con un circuito eléctrico, compuesto por dos inductores, un capacitor, dofuentes de corriente y una fuente de voltaje, este circuito es representado en la siguiente figura: dh1 (t) h1 (t) + = qin dt R1 (9) h1 (t) h2 (t) dh1 (t) = − dt R1 R2 (10) A1 (7) Donde: R1 = ρ l1 A1 (11) R2 = ρ l2 A2 (12) Con las ecuaciones diferenciales obtenidas se puede hacer una analogia con un circuito eléctrico equivalente representado en la siguiente figura: Figura 4. Circuito que modela de forma análoga al sistema mecánico I. Figura 6. Circuito Eléctrico equivalente II. Sus respectivas ecuaciones diferenciales son: Medio C: Nodo 1: CC i1(t) = C1 dV1 (t) V1 (t) + dt R1 (13) Las ecuaciones mostradas no son lineales por culpa de T0 que actua como un offset, por lo tanto, se hacen los siguientes cambios de variables: Nodo 2: V1 (t) dV2 (t) V2 (t) = C2 + R1 dt R2 II-C. dTC (t) TC (t) − TA (t) TC (t) − TB (t) TC (t) − T0 + + + = qin dt RAC RBC RC0 (17) (14) T1 = TA − T0 ; T2 = TB − T0 ; $T3 = TC − T0 Con estos cambios de variables se hacen las siguientes operaciones: Sistema Térmico El Tercer sistema se representa en la siguiente figura: T1 −T2 = TA −TB ; T1 −T3 = TA −TC ; T2 −T3 = TB −TC Además, las derivadas son: dTA (t) dt = dT1 (t) dt ; dTB (t) dt = dT2 (t) dt ; dTC (t) dt = dT3 (t) dt Y las ecuaciones diferenciales finalmente serian: Medio A: Figura 7. Sistema ??. CA De la Fig.5 se pueden ver 3 medios diferentes A,B y C con Capacitancias CA , CB y CC respectivamente; Además, cuentan con tempraturas TA , TB y TC y resistencias RAC y RBC . Aparte de todo lo anterior, se debe tener en cuenta el efecto del ambiente en cada uno de los medios, por lo que se agragan los siguientes parametros: T0 , RA0 , RB0 y RC0 . Su sistema de ecuaciones se representa como: dT1 (t) T1 (t) − T3 (t) T1 (t) + + =0 dt RAC RA0 (18) dT2 (t) T2 (t) − T3 (t) T2 (t) + + =0 dt RBC RB0 (19) Medio B: CB Medio C: Medio A: CA dTA (t) TA (t) − TC (t) TA (t) − T0 + + =0 dt RAC RA0 CC (15) Con las ecuaciones diferenciales obtenidas se puede hacer una analogia con un circuito Hidráulico equivalente representado en la siguiente figura: Medio B: CB dTB (t) TB (t) − TC (t) TB (t) − T0 + + =0 dt RBC RB0 dT3 (t) T3 (t) − T1 (t) T3 (t) − T2 (t) T3 (t) + + + = qin dt RAC RBC RC0 (20) (16) Sus respectivas ecuaciones diferenciales son: Nodo B: CB dvB (t) vB (t) − vC (t) vB (t) + + =0 dt RBC RB (25) Nodo C: Figura 8. Circuito Hidráulico equivalente CC Tanque A: dhA (t) hA (t) − hC (t) hA (t) + + =0 dt RAC RA0 AA (21) dvC (t) vC (t) − vA (t) vC (t) − vB (t) vC (t) + + + = i(t) dt RAC RBC RC (26) Se aclara que los voltajes vA (t), vB (t) y vC (t) son los voltajes en los nodos A, B y C respectivamente, además que son los mismos voltajes que caen sobre cada capacitor. Tanque B: AB dhB (t) hB (t) − hC (t) hB (t) + + =0 dt RBC RB0 II-D. Sistema Fı́sico 4: Tanques Acoplados El cuarto sistema se representa en la siguiente figura: (22) Tanque C: AC dhC (t) hC (t) − hA (t) hC (t) − hB (t) hC (t) + + + = qin dt RAC RBC RC0 (23) Figura 10. Tanques Acoplados. Por último, se obtiene el circuito eléctrico equivalente: La Fig.7 muestra 2 tanques unidos por una válvula con resistencia R1 , con areas A1 y A2 , con una altura del lı́quido interior h1 y h2 , una válvula de salida para cada uno con resistencias R3 y R2 y un flujo de entrada qin sobre el tanque 2. Su sistema de ecuaciones se representa como: Tanque 2. Figura 9. Circuito Hidráulico equivalente A2 dh2 (t) h2 (t) − h1 (t) h2 (t) + + = qin dt R1 R2 (27) dh1 (t) h2 (t) − h1 (t) h1 (t) + + =0 dt R1 R1 (28) Sus respectivas ecuaciones diferenciales son: Nodo A: CA Tanque 1. dvA (t) vA (t) − vC (t) vA (t) + + =0 dt RAC RA (24) A1 Con las ecuaciones diferenciales obtenidas se puede hacer una analogia con un circuito eléctrico equivalente representado en la siguiente figura: II-E. Sistema Fı́sico 5 El quinto sistema se representa en la siguiente figura: Figura 11. Circuito Eléctrico Equivalente. Figura 12. Sistema mecánico, la fuerza sinusoidal se modela como F. Sus respectivas ecuaciones diferenciales son: Nodo 1. Por lo tanto los diagramas de fuerza para m2 , m1 y el estremo inferior del resorte k1 son los siguientes: C2 dv2 (t) v2 (t) − v1 (t) v2 (t) + + = i(t) dt R1 R2 (29) dv1 (t) v2 (t) − v1 (t) v1 (t) + + =0 dt R1 R1 (30) Nodo 2. C1 Se aclara que los voltajes v1 (t) y v2 (t) son los voltajes en los nodos 1 y 2 respectivamente, además de que son los mismos voltajes que caen sobre cada capacitor. Figura 13. a): Fuerzas que actuan sobre m1 , b): Fuerzas que actuan sobre m2 , c): Fuerzas que actuan sobre el extremo inferior del resorte K1 . Por lo tanto, las ecuaciones diferenciales que modelan al sistema mecánico de la Fig.(10) son las siguientes: 0 = m2 d2 y(t) dy(t) dx(t) + b[ − ] + K2 [y(t) − x(t)] (31) dt2 dt dt 0 = m1 dx(t) dy(t) d2 x(t) + b[ − ] + K1 [x(t) − u(t)]+ dt2 dt dt K2 [x(t) − y(t)] (32) F = K1 [u(t) − x(t)] (33) Con las ecuaciones diferenciales obtenidas se puede hacer una analogia con un circuito eléctrico, en este caso se hara con un sistema eléctrico serie, se obtiene entonces el siguiente sistema de ecuaciones: 0 = L2 di2 (t) 1 +R[i2 (t)−i1 (t)]+ dt C2 Z t i2 (τ )−i1 (τ )dτ (34) 0 Z t di1 (t) 1 0 = L1 i1 (τ ) − i3 (τ )dτ + + R[i1 (t) − i2 (t)] + dt C1 0 Z t 1 i1 (τ ) − i2 (τ )dτ (35) C2 0 1 VF = Asen(ωt + ϕ) = C1 Z t i3 (τ ) − i1 (τ )dτ (36) 0 Por lo tanto el circuito equivalente queda de la siguiente manera: Figura 14. Circuito del modelo análogo al sistema mecánico III. C ONCLUSIONES El modelamiento de estos sistemas fı́sicos fue de ayuda para poder entender el comportamiento de circuitos con varios elementos pasivos, por lo que resulta más fácil encontrar el análisis matemático del sistema fı́sico que del eléctrico. Se puede ver como las ecuaciones diferenciales son muy útiles no solo en el ámbito de la ingenieria electónica, sinó también en muchas circunstancias que se viven dı́a a dı́a, como los tanques, el sistema térmico, los sistemas de amortiguamiento de los carros, las propagaciones de los virus, etc. Una de las ventajas de realizar una equivalencia entre un sistema fı́sico y un sistema eléctrico es que se adquiere la capacidad de modelar sistemas que no necesariamente tengan que ver con variables eléctricas, proponiendo analogias se puede llegar a modelar sistemas mecánicos, hidráulicos y térmicos sin necesidad de profundizar en los fundamentos fı́sicos para realizar dicho modelado. El proceso de realizar la implementación del modelo en un circuito facilita el estudio del sistema fı́sico pues la implementación de un circuito es mucho más sencilla que la implementación fı́sica real del modelo.